
Evaluation of Electric Power Quality in the Ship-Integrated Electrical Power System with a Main DC Bus and Power Semiconductor Electric Drives as Part of the Electric Propulsion Complex



Abstract
:1. Introduction
2. Development of a MATLAB Model of the SEPS of the MPSV with EPC
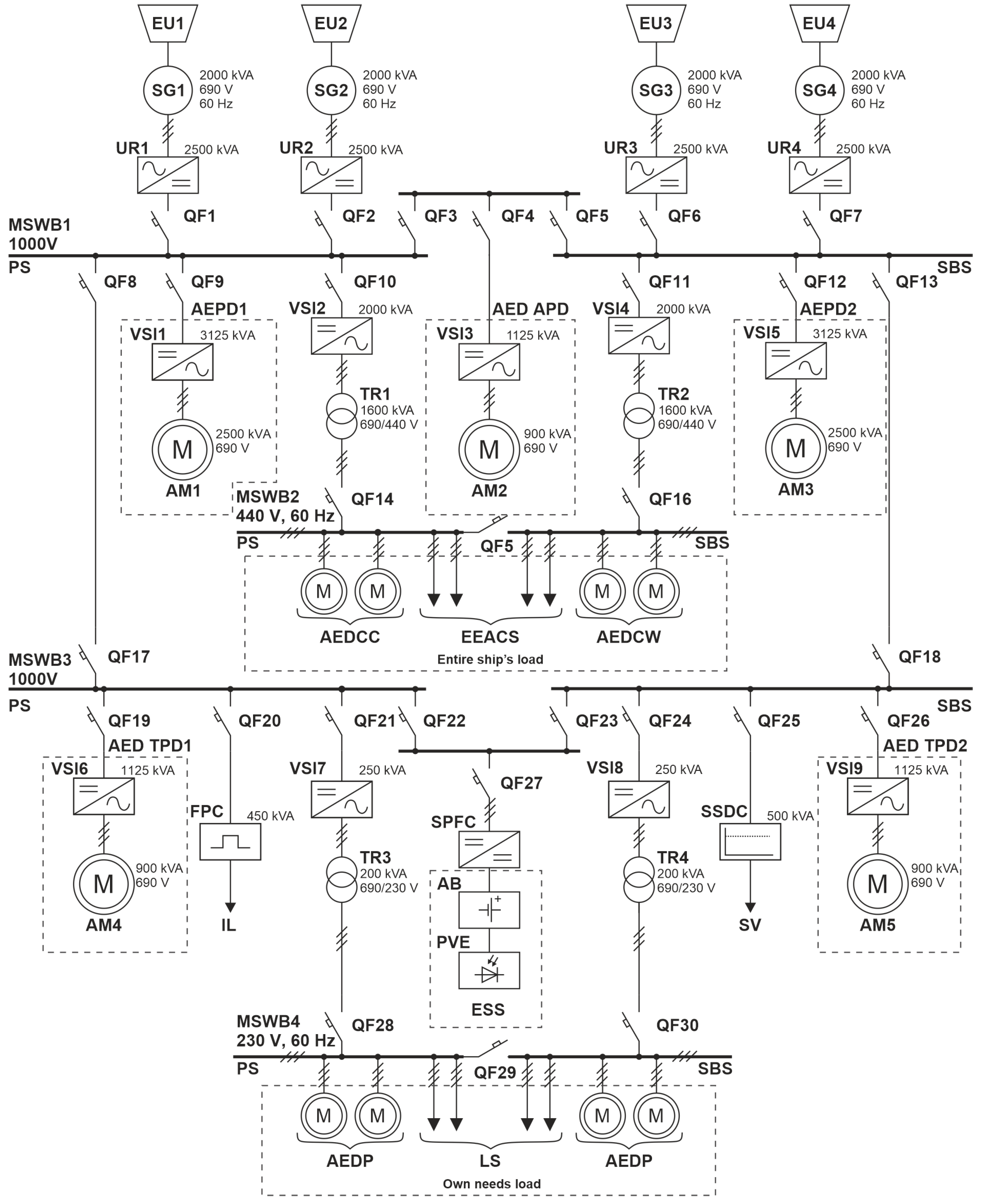
2.1. Structure and Parameters of the SEPS of the MPSV with EPC
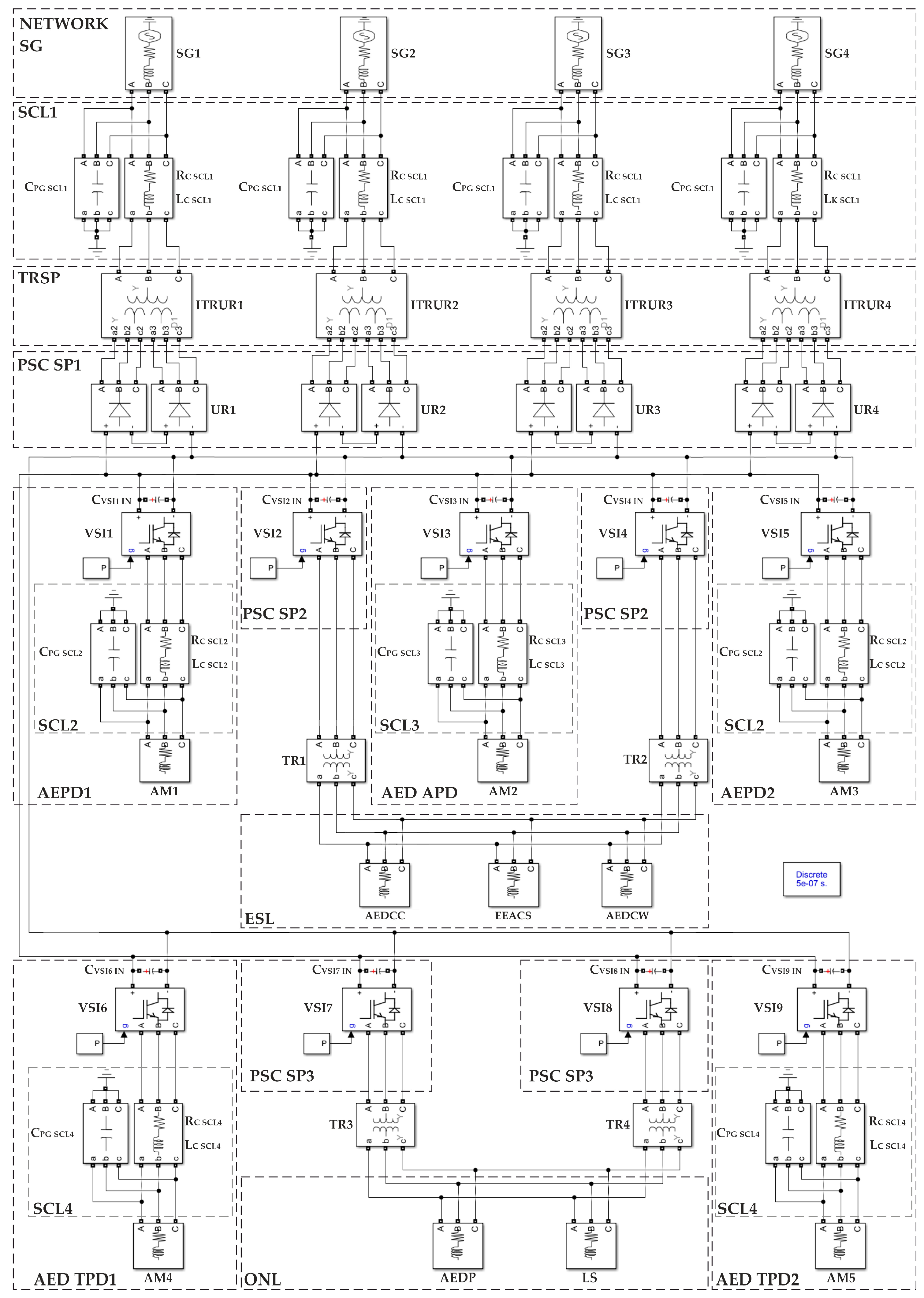
2.2. SEPS Model Structure of the MPSV with EPC and Methodology for Derivation of Its Parameters
3. Results
3.1. Calculation of the MATLAB Model Parameters for SEPS of MPSV According to the Improved Methodology
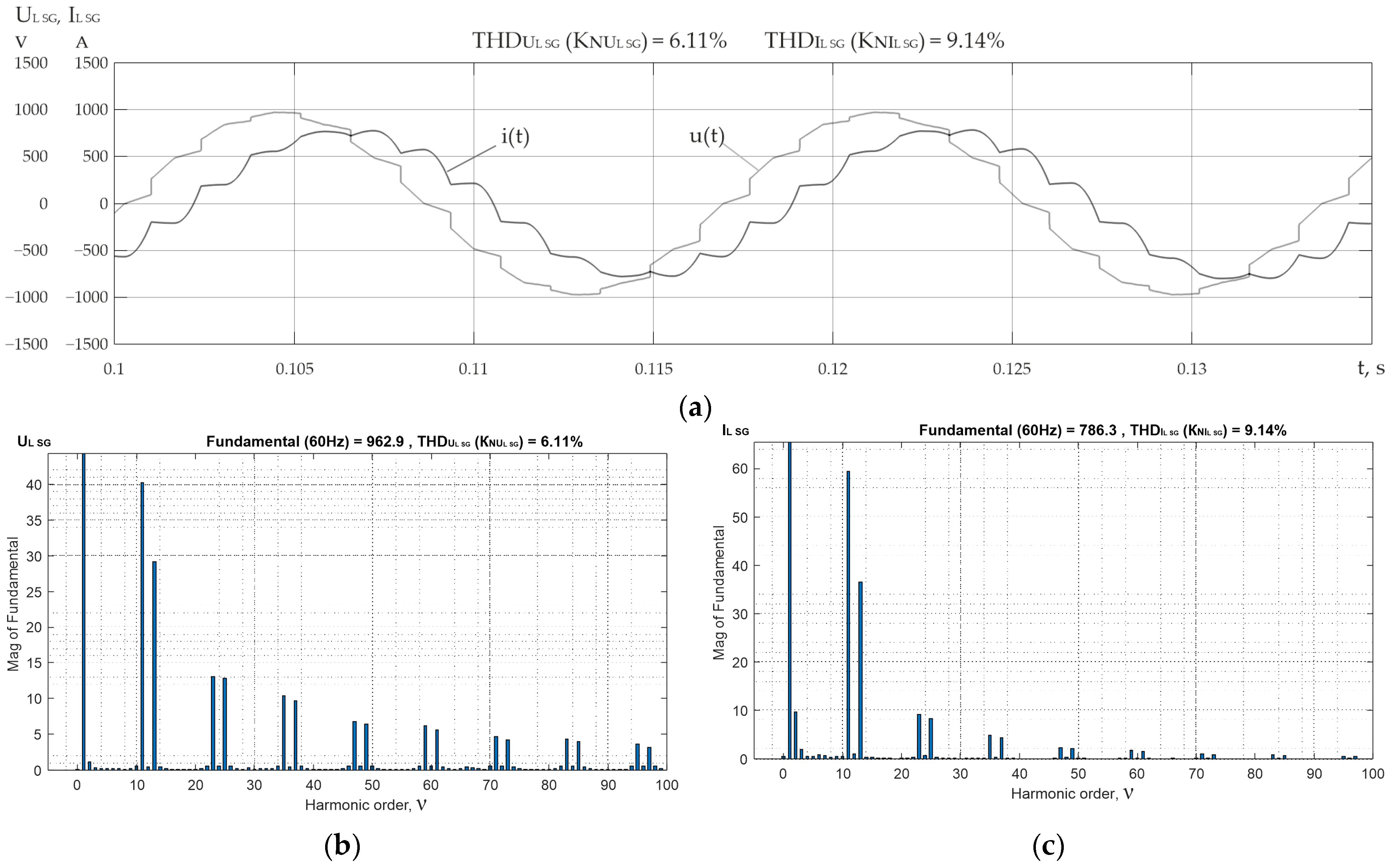
3.2. The Modeling Results for EPQI Assessment in the SEPS of MPSV in MATLAB Simulink
4. Discussion
- Features of operating modes;
- A consolidated structure containing a large number of sources and consumers of electricity, including the propulsion complex and general ship loads;
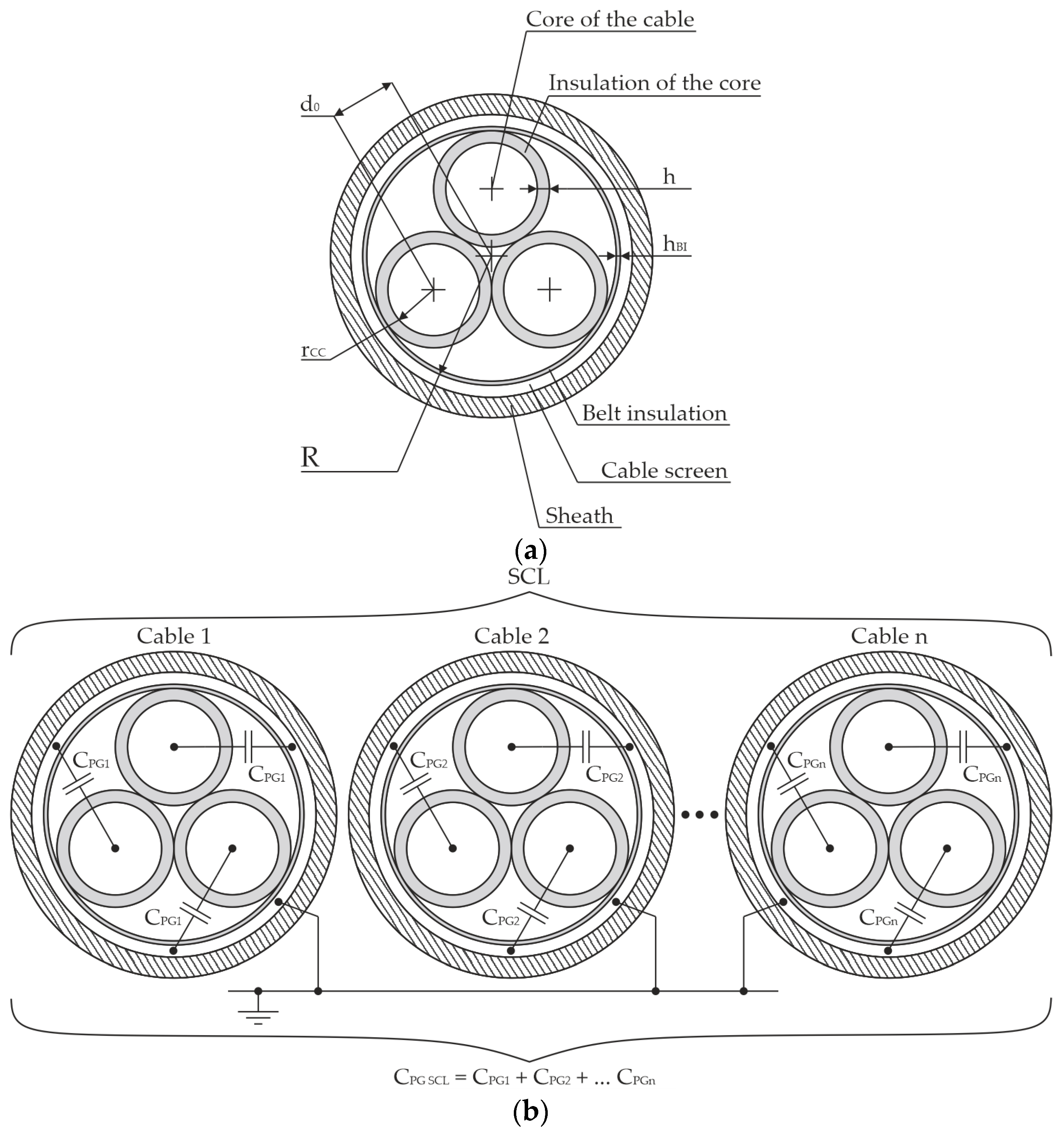
- Intrinsic parameters of cable lines, primarily “phase-to-ground” capacitances, which cause additional voltage distortions and resonance phenomena in the high-frequency region of the spectrum;
- The high order of differential equations embedded in the MATLAB Simulink model makes it possible to reliably describe the processes in the system with a proportionality of generated and consumed power.
- Low frequency—0–2 kHz;
- Intermediate—2–9 kHz;
- High frequency—9–150 kHz;
- High frequency—150 kHz–30 MHz.
5. Conclusions
- 1.
- The transition to the architecture of an integrated ship system with a DC main bus allows, due to fuel savings, for increasing the efficiency of the ship as a whole by 20%, reducing the weight and volume of on-board electrical equipment by 30%.
- 2.
- The most important condition for the further successful use of the advantages of integrated ship DC systems is to solve the problem of EMC by improving the methods of evaluating a wide range of harmonics, taking into account circuit and mode features that affect the THD of voltages and currents. Such features include: a complex structure of the system containing numerous semiconductor converters with different power schemes and control algorithms; the presence of their own parameters of cable lines, primarily capacitances, which cause additional distortions and resonance phenomena in the high-frequency range.
- 3.
- To solve the main task, an adequate model of the system was created in the MATLAB Simulink environment, the parameters of its elements were determined, and a model experiment was performed. Based on the results of the conducted experiment, a detailed analysis of electric power quality indicators was performed, which relate to certain groups of elements in the system: synchronous generators, electric propulsion complexes, ship-wide consumers, and consumers of their own needs.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| EPC | electric propulsion complex |
| HDEPC | hybrid diesel-electric propulsion complex |
| EPQ | electric power quality |
| MPSV | marine platform supply vessel |
| DP | dynamic positioning |
| SEPP | ship electric power plant |
| EPI | electric propulsion installation |
| SEDMM | semiconductor electric drive for the main motion |
| SEDDPT | semiconductor electric drive for dynamic positioning devices |
| DGU | diesel-generator unit |
| PSC | power semiconductor converter |
| EPQI | electric power quality indicator |
| SEPS | ship electric power system |
| EPQ | electric power quality |
| EMI | electromagnetic interference |
| CL | cable line |
| SG | synchronous generator |
| ESS | energy storage system |
| DE | diesel engines |
| PSC SP | power semiconductor converter for system purposes |
| UR | uncontrolled rectifier |
| VSI | voltage source inverter |
| PWM | pulse-width modulation |
| AM | asynchronous motor |
| TR | transformer |
| FPC | frequency pulse converter |
| SSDC | stabilized source of direct current |
| SFPC | stabilized frequency pulse converter |
| AEDCC | asynchronous electric drive of cargo cranes |
| AEDCW | asynchronous electric drive of cargo winches |
| EEACS | electrical equipment of air conditioning systems |
| AEDP | asynchronous electric drive of pumps |
| LS | lighting system |
| AB | accumulator battery |
| PVE | photovoltaic element |
| SCL | segment of the cable line |
| ER | efficiency ratio |
| MSWB1,3 | direct current main switchboard |
| MSWB2 | alternating current main switchboard |
| MSWB4 | alternating current main switchboard |
| TRSP | transformer for system purpose |
| EU | engine unit |
| PS | port side |
| SBS | starboard side |
| QF | automatic breaker |
| MSWB1,3 nominal voltage | |
| MSWB2 linear nominal voltage | |
| MSWB4 linear nominal voltage | |
| linear nominal voltage of the synchronous generator | |
| nominal full power of the synchronous generator | |
| nominal full power of the uncontrolled rectifier | |
| nominal full power of the voltage source inverter | |
| nominal full power of the transformer | |
| nominal full power of the asynchronous motor | |
| nominal total full power of frequency pulse converter | |
| nominal total full power of stabilized source of direct current | |
| nominal total full power of the energy storage system | |
| the total full capacity of the entire ship’s load | |
| the total full capacity of own needs load | |
| frequency of the output voltage of synchronous generator | |
| power factor | |
| supertransient resistance of the synchronous generator along the longitudinal axis | |
| supertransient resistance of the synchronous generator along the transverse axis | |
| nominal active power of the synchronous generator | |
| nominal reactive power of the synchronous generator | |
| phase nominal voltage of the synchronous generator | |
| inductive resistance of a synchronous generator | |
| inductance of a synchronous generator | |
| active resistance of a synchronous generator | |
| nominal linear current of the segment of the cable line | |
| efficiency ratio of the cable | |
| ITRUR | input transformer of uncontrolled rectifier |
| active resistance of the cable in a segment of the cable line | |
| inductive resistance of the cable in a segment of the cable line | |
| inductance of the cable in a segment of the cable line | |
| specified active resistance of one meter of cable | |
| specified inductive resistance of one meter of cable | |
| the length of the cable in the segment of cable line | |
| the number of parallel cables in the segment of cable line | |
| voltage frequency | |
| specified phase-to-ground capacitance of the cable | |
| dielectric constant of the cable insulation | |
| the radius of the inner surface of the cable screen (shield) | |
| the distance between the longitudinal axis of the cable and the axis of the core | |
| radius of the cable core | |
| thickness of the cable core insulation | |
| thickness of the belt insulation | |
| cross-sectional area of the cable core | |
| Phase-to-ground capacitance of the cable in the segment of cable line | |
| nominal active power of the voltage source inverter | |
| nominal full power of the voltage source inverter | |
| nominal linear voltage of the voltage source inverter | |
| nominal current of the cable | |
| PSC EPC | power semiconductor converter of the electric propulsion complex |
| ESL | entire ship’s loads |
| ONL | own needs loads |
| output frequency of the voltage source inverter of electric propulsion complex | |
| nominal full power of the uncontrolled rectifier input transformer | |
| linear nominal voltage of the windings of uncontrolled rectifier input transformer | |
| short-circuit voltage of the uncontrolled rectifier input transformer | |
| active resistance of the windings of uncontrolled rectifier input transformer for the connection in a “star” | |
| inductive resistance of the windings of uncontrolled rectifier input transformer for the connection in a “star” | |
| inductance of the windings of uncontrolled rectifier input transformer for the connection in a “star” | |
| active resistance of the windings of uncontrolled rectifier input transformer for the connection in a “delta” | |
| inductive resistance of the windings of uncontrolled rectifier input transformer for the connection in a “delta” | |
| inductance of the input transformer of uncontrolled rectifier windings for connection in a “delta” | |
| input capacitance of the voltage source inverter | |
| rectified voltage at the input of the voltage source inverter | |
| allowable voltage increment on the input capacitance of VSI | |
| time constant of the voltage source inverter load circuit | |
| inductance in the phase load of the voltage source inverter | |
| active resistance in the phase load of the VSI | |
| total resistance in the phase load of the VSI | |
| nominal voltage in the phase load of the VSI | |
| nominal current in the phase load of the VSI | |
| nominal full power of the voltage source inverter | |
| PWM index of the voltage source inverter | |
| inductive resistance in the phase load of the VSI | |
| inductance in the phase load of the voltage source inverter | |
| active resistance of the transformer winding | |
| nominal full power of the transformer | |
| linear nominal voltage of the transformer windings | |
| Short-circuit voltage of the transformer | |
| inductive resistance of the transformer windings | |
| inductance of the transformer winding | |
| LFB | low-frequency band |
| HFB | high-frequency band |
| total harmonic distortion of voltage | |
| total harmonic distortion of current | |
| number of pluses of uncontrolled rectifier | |
| dimensionless coefficient | |
| harmonic order | |
| AED APD | asynchronous electric drive of the azimuth propulsion device |
| AEPD1,2 | asynchronous electric propulsion drives |
| AED TPD1,2 | asynchronous electric drives of the tunnel propulsion devices |
References
- Kamala, S.; Chauhan, P.J.; Panda, S.K.; Wilson, G.; Liu, X.; Gupta, A.K. Methodology to qualify marine electrical propulsion system architectures for platform supply vessels. IET Electr. Syst. Transp. 2018, 8, 152–165. [Google Scholar] [CrossRef]
- Zhook, A.K.; Zhook, D.A. Complex rating and power quality providing in ac/dc electric power system of drilling vessel «Gazprom–1». In Proceedings of the 5th International Scientific and Technical Conference on Unconventional Electromechanical and Electrical Systems UEES’01, Międzyzdroje, Poland, 5–8 September 2001; Volume 2, pp. 551–556. [Google Scholar]
- Zhuk, O.; Zhuk, D.; Diakonov, O. Input Voltages and Currents Distortion and Power Factor of Frequency Converters. In Proceedings of the 2020 IEEE 40th International Conference on Electronics and Nanotechnology (ELNANO), Kyiv, Ukraine, 22–24 April 2020; pp. 791–796. [Google Scholar]
- Zhuk, O.; Zhuk, D.; Kryvoruchko, D. Voltage Harmonic Distortion in Autonomous Electric Power System with an Adjustable Power Line Conditioner. In Proceedings of the 2018 IEEE 3rd International Conference on Intelligent Energy and Power Systems (IEPS), Kharkiv, Ukraine, 10–14 September 2018; pp. 33–38. [Google Scholar] [CrossRef]
- Zhuk, O.; Zhuk, D.; Kryvoruchko, D.; D’yakonov, O. Control of Improved Hybrid Power Line Conditioner. In Proceedings of the 2018 IEEE 38th International Conference on Electronics and Nanotechnology (ELNANO), Kyiv, Ukraine, 24–26 April 2018; pp. 605–610. [Google Scholar]
- Zhuk, O.K.; Zhuk, D.O.; Kryvoruchko, D.V. Controlled Hybrid Filter Compensation Device. Utility Model Patent #120790, 27 November 2017. Bulletin No. 22/2017. Available online: https://sis.ukrpatent.org/uk/search/detail/743870/ (accessed on 25 February 2023).
- Zhuk, O.; Zhuk, D.; Kryvoruchko, D.; Stepenko, S. An improvement of compensators of complete power non-active components in autonomous electric power systems. In Proceedings of the 2016 2nd International Conference on Intelligent Energy and Power Systems (IEPS), Kyiv, Ukraine, 7–11 June 2016. [Google Scholar] [CrossRef]
- Zhuk, A.K.; Zhuk, D.A.; Krivoruchko, D.V.; Stepenko, S.A. Controlled filter-compensating gear for the autonomous electric power system with high-power converters. Tech. Electrodyn. 2016, 2016, 32–34. [Google Scholar]
- International Maritime Organization (IMO). Prevention of Air Pollution from Ships (MARPOL 73/78 Annex VI); Technical report; IMO: London, UK, 2004. [Google Scholar]
- Satpathi, K.; Balijepalli, V.M.; Ukil, A. Modeling and Real-Time Scheduling of DC Platform Supply Vessel for Fuel Efficient Operation. IEEE Trans. Transp. Electrif. 2017, 3, 762–778. [Google Scholar] [CrossRef] [Green Version]
- IMCA. MSC/Circular.645—Guidelines for Vessels with Dynamic Positioning Systems—(Adopted on 6 June 1994); IMCA: London, UK, 1994. [Google Scholar]
- IMCA. MSC.1/Circular.1580—Guidelines for Vessels and Units with Dynamic Positioning (DP) Systems—(16 June 2017); IMCA: London, UK, 2017. [Google Scholar]
- Reusser, C.A.; Young, H.A.; Perez Osses, J.R.; Perez, M.A.; Simmonds, O.J. Power Electronics and Drives: Applications to Modern Ship Propulsion Systems. IEEE Ind. Electron. Mag. 2020, 14, 106–122. [Google Scholar] [CrossRef]
- Ginn, H.; Cuzner, R. The Shipboard Integrated Power System [About This Issue]. IEEE Electrif. Mag. 2015, 3, 2–3. [Google Scholar] [CrossRef]
- Kim, S.-Y.; Choe, S.; Ko, S.; Sul, S.-K. A Naval Integrated Power System with a Battery Energy Storage System: Fuel efficiency, reliability, and quality of power. IEEE Electrif. Mag. 2015, 3, 22–33. [Google Scholar] [CrossRef]
- Michalopoulos, P.; Kanellos, F.D.; Tsekouras, G.J.; Prousalidis, J.M. A Method for Optimal Operation of Complex Ship Power Systems Employing Shaft Electric Machines. IEEE Trans. Transp. Electrif. 2016, 2, 547–557. [Google Scholar] [CrossRef]
- Zahedi, B.; Norum, L.E. Modeling and Simulation of All-Electric Ships With Low-Voltage DC Hybrid Power Systems. IEEE Trans. Power Electron. 2013, 28, 4525–4537. [Google Scholar] [CrossRef]
- Skjong, E.; Volden, R.; Rodskar, E.; Molinas, M.; Johansen, T.A.; Cunningham, J. Past, Present, and Future Challenges of the Marine Vessel’s Electrical Power System. IEEE Trans. Transp. Electrif. 2016, 2, 522–537. [Google Scholar] [CrossRef] [Green Version]
- Babii, O.V.; Bilokurets, A.O. Rules of Classification and Construction of Sea Vessels; Register of Shipping of Ukraine: Kyiv, Ukraine, 2020; Volume 2, p. 792. Available online: http://91.203.91.178/books/PCBSSt2_2020.pdf (accessed on 25 February 2023).
- ABS. Guidance Notes on Control of Harmonics in Electrical Power Systems; ABS: Houston, TX, USA, 2006.
- Anisimov, Y.; Vasiliev, E. Electromagnetic Compatibility of Semiconductor Converters and Ship Electrical Installations; Shipbuilding: Saint Petersburg, Russia, 1990; 264p. [Google Scholar]
- Banaei, M.R.; Alizadeh, R. Simulation-Based Modeling and Power Management of All-Electric Ships Based on Renewable Energy Generation Using Model Predictive Control Strategy. IEEE Intell. Transp. Syst. Mag. 2016, 8, 90–103. [Google Scholar] [CrossRef]
- Kumm, W.H. Marine and naval applications of fuel cells for propulsion: The process selection. J. Power Source 1990, 29, 169–179. [Google Scholar] [CrossRef]
- Chan, C.C.; Bouscayrol, A.; Chen, K. Electric, Hybrid, and Fuel-Cell Vehicles: Architectures and Modeling. IEEE Trans. Veh. Technol. 2010, 59, 589–598. [Google Scholar] [CrossRef]
- Soman, R.; Steurer, M.M.; Toshon, T.A.; Faruque, M.O.; Cuzner, R.M. Size and Weight Computation of MVDC Power Equipment in Architectures Developed Using the Smart Ship Systems Design Environment. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 40–50. [Google Scholar] [CrossRef]
- ABB. The step forward. In Onboard DC Grid; Technical Report; ABB: Zürich, Switzerland, 2014. [Google Scholar]
- Three Phase Synchronous Generators. 160–900 Frame Sizes Industrial/Marine Applications. Marelli Generators: Milan, Italy. Available online: https://www.rimor.eu/wp-content/uploads/documenti/Generatori_sincroni_trifase_01-2.pdf (accessed on 25 February 2023).
- Industry Standard 6181-81; Ship Electric Power Systems. Methods for Calculating Transient Processes: Moscow, Russia, 1981.
- HELKAMA. HELKAMA: Ship Cables, 1/2013.—76 p. (HELKAMA: Cудoвые Кaбели, 1/2013—76 с); HELKAMA: Helsinki, Finland, 2013. [Google Scholar]
- Grave, V.; Romanovsky, V.; Ushakov, V. Electric Fire Safety of High-Voltage Ship Electric Power Systems; Elmor: St. Petersburg, Russia, 2003; 160p. [Google Scholar]
- Gerasimenko, A. Transmission and Distribution of Electrical Energy, 4th ed.; Gerasimenko, A., Fedin, V., Eds.; KNORUS: Moscow, Russia, 2014; 648p. [Google Scholar]
- Chizhenko, I.; Rudenko, V.; Senko, V. Fundamentals of Converting Technology; Textbook for the specialty “Industrial Electronics” Higher School: Moscow, Russia, 1980; 430p. [Google Scholar]
- Rozanov, Y.K. Fundamentals of Power Electronics; Energoatomizdat: Moscow, Russia, 1992; 296p. [Google Scholar]
- Zhuk, D. Protection of asynchronous motor from overvoltages in the system of variable-frequency electric drive, taking into account the cable line. Electrotech. Comput. Syst. 2001, 57, 40–44. [Google Scholar]
- Zhuk, D.; Zhuk, O. Impact of cable line parameters on pulsed surges in asynchronous frequency controlled electric drives. Electrotech. Comput. Syst. 2005, 65, 39–42. [Google Scholar]
- Kanellos, F.D.; Prousalidis, J.; Tsekouras, G.J. Onboard DC grid employing smart grid technology: Challenges, state of the art and future prospects. IET Electr. Syst. Transp. 2015, 5, 1–11. [Google Scholar] [CrossRef]
- Satpathi, K.; Ukil, A.; Nag, S.S.; Pou, J.; Zagrodnik, M.A. DC Marine Power System: Transient Behaviour and Fault Management Aspects. IEEE Trans. Ind. Inform. 2018, 15, 1911–1925. [Google Scholar] [CrossRef]
- Sulligoi, G.; Bosich, D.; Giadrossi, G.; Zhu, L.; Cupelli, M.; Monti, A. Multiconverter Medium Voltage DC Power Systems on Ships: Constant-Power Loads Instability Solution Using Linearization via State Feedback Control. IEEE Trans. Smart Grid 2014, 5, 2543–2552. [Google Scholar] [CrossRef]
- Peng, C.; Song, X.; Huang, A.Q.; Husain, I. A Medium-Voltage Hybrid DC Circuit Breaker—Part II: Ultrafast Mechanical Switch. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 289–296. [Google Scholar] [CrossRef]
- Kumar, D.; Zare, F.; Ghosh, A. DC Microgrid Technology: System Architectures, AC Grid Interfaces, Grounding Schemes, Power Quality, Communication Networks, Applications, and Standardizations Aspects. IEEE Access 2017, 5, 12230–12256. [Google Scholar] [CrossRef]
- Zahedi, B.; Norum, L.E.; Ludvigsen, K.B. Optimized efficiency of all-electric ships by dc hybrid power systems. J. Power Source 2014, 255, 341–354. [Google Scholar] [CrossRef]
- Nebb, O.C.; Zahedi, B.; Lindtjorn, J.O.; Norum, L. Increased fuel efficiency in ship LVDC power distribution systems. In Proceedings of the 2012 IEEE Vehicle Power and Propulsion Conference, Seoul, Republic of Korea, 9–12 October 2012; pp. 564–568. [Google Scholar]
- IEC 61000-4-30 International Standard; Electromagnetic Compatibility (EMC)—Part 4-30: Testing and Measurement Techniques—Power Quality Measurement Methods. International Electrotechnical Commission: Geneva, Switzerland, 2021.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| IMO DP Class | ABS DP Class | LRS DP Class | DNV DP Class |
|---|---|---|---|
| - | DPS-0 | DP (CM) | DPS 0 DYNPOS-AUTS |
| Class 1 | DPS-1 | DP (AM) | DPS 1 DYNPOS-AUT |
| Class 2 | DPS-2 | DP (AA) | DPS 2 DYNPOS-AUTR |
| Class 3 | DPS-3 | DP (AAA) | DPS 3 DYNPOS-AUTRO |
| Operation Mode | Types and Levels of SEPS Loads | ||||
|---|---|---|---|---|---|
| SEDMM (AGED) | SEDDPT (AED TPD1,2, AED APD) | General Vascular Loads | Load of Own Needs | Pulse Load | |
| High | Low | Medium | High | High |
| Low | High | Medium | High | High |
| Medium | High | High | High | High |
| - | - | High | Medium | High |
| Parameters | SCL1 | SCL2 | SCL3 | SCL4 |
|---|---|---|---|---|
| segment length | m | m | m | m |
| parallel cables number | , | |||
| cable active resistance | Ohm | Ohm | Ohm | Ohm |
| cable inductive resistance | Ohm | Ohm | Ohm | Ohm |
| cable inductance | H | H | H | H |
| cable “p2g” capacitance | F | F | F | F |
| Winding Parameters | ITRURw1 | ITRURw21 | ITRURw22 |
|---|---|---|---|
| voltage | V | V | V |
| active resistance | Ohm | Ohm | Ohm |
| inductive resistance | Ohm | Ohm | Ohm |
| inductance | H | H | H |
| Winding Parameters | TR1,2 w1 | TR1,2w2 | TR3,4 w1 | TR3,4w2 |
|---|---|---|---|---|
| voltage | V | V | V | V |
| active resistance | Ohm | Ohm | Ohm | Ohm |
| inductive resistance | Ohm | Ohm | Ohm | Ohm |
| inductance | H | H | H | H |
| Mode | Total Generated Power | PSC SP1 | PSC EPC | ESL | ONL | Total Power Consumption | ||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| SUR∑, kVA | UdUR, V | IdUR∑, A | SPSC EPC∑, kVA | SESL∑, kVA | UL ESL, V | IL ESL∑, A | SONL∑, kVA | UL ONL, V | IL ONL∑, A | SG1,2,3,4ВИХ | UR1,2,3,4ВХ | MSWB2 | MSWB4 | AM1,3 | AM2 | SG1,2,3,4ВИХ | UR1,2,3,4ВХ | MSWB2 | MSWB4 | AM1,3 | AM2 | |||
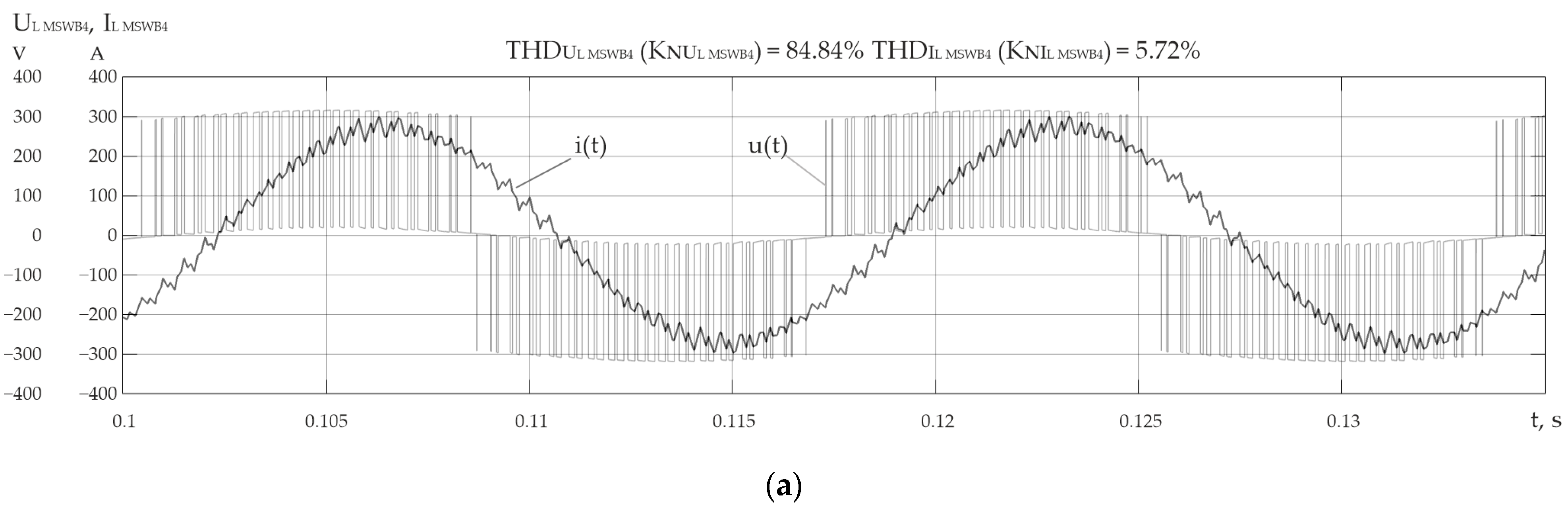
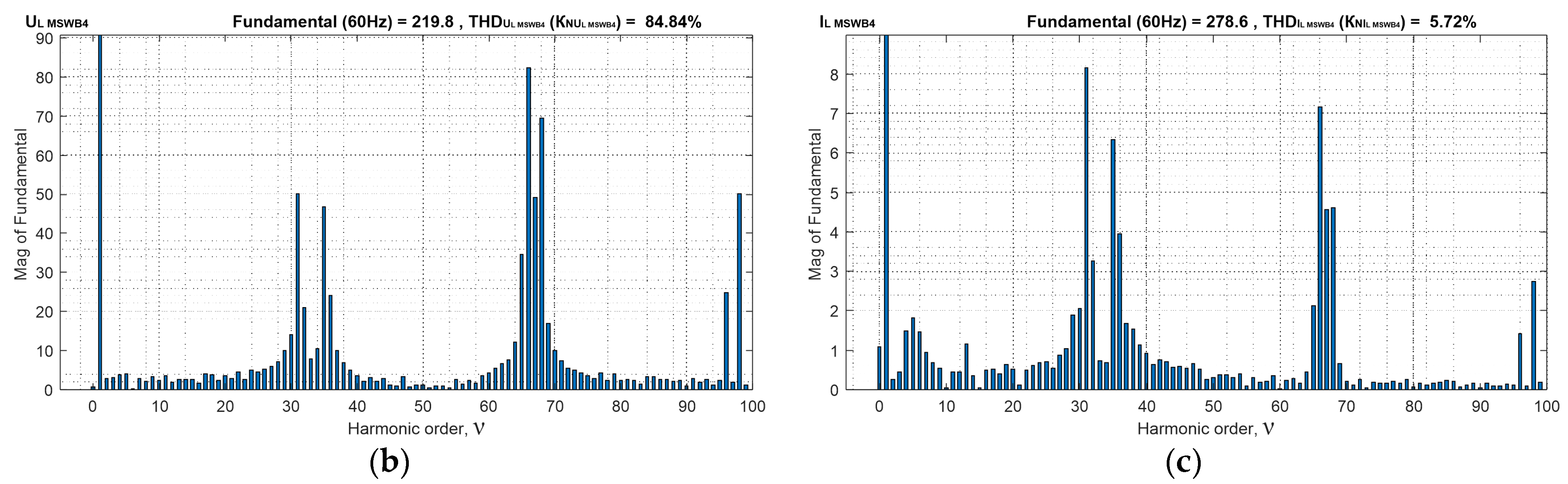
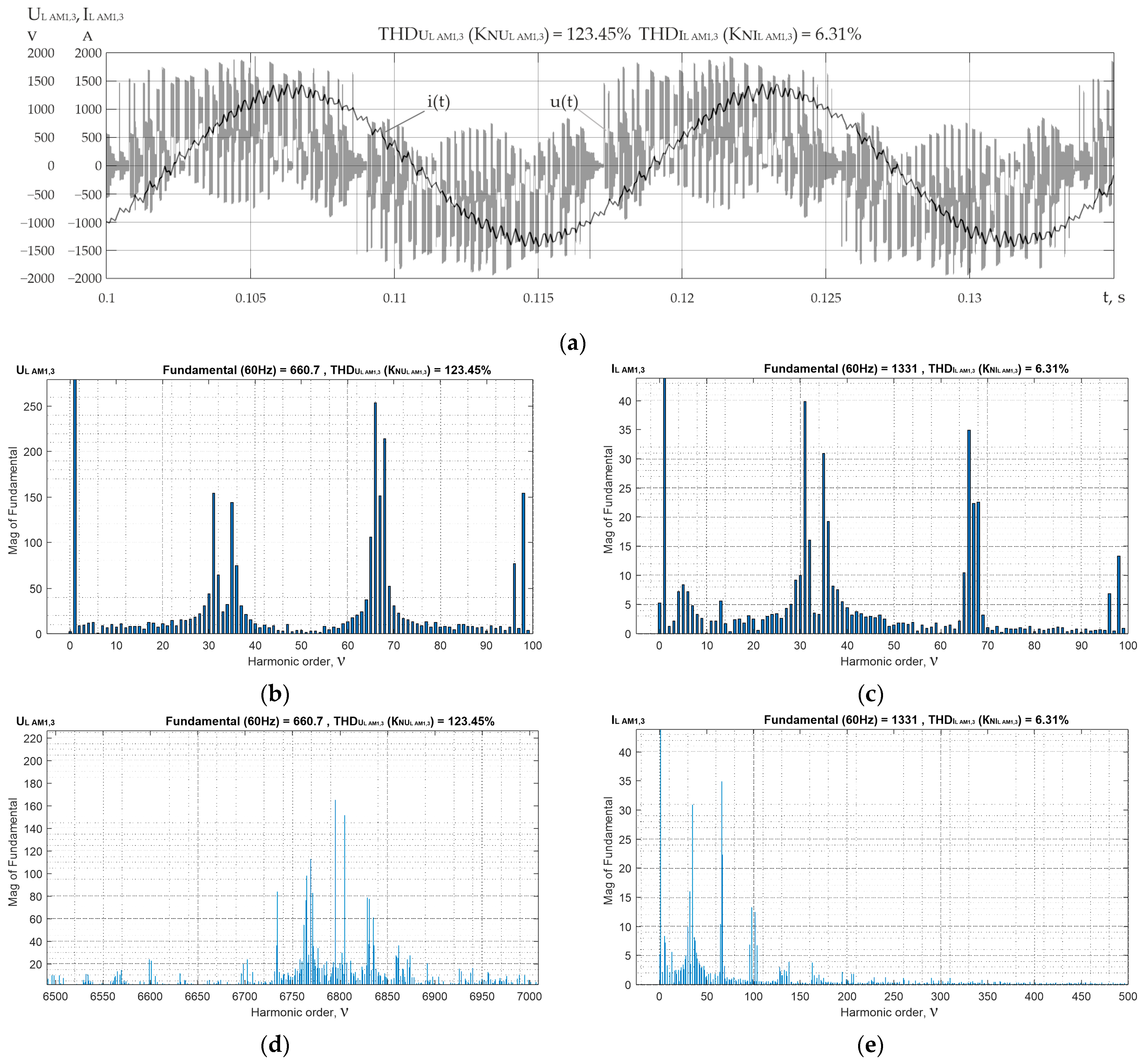
| 1 | 6000 | 7500 | 1000 | 1930 | 4300 | 625 | 440 | 462 | 140 | 230 | 197 | 5065 | 6.11 | 8.70 | 88.67 | 84.84 | 123.42 | 98.13 | 9.14 | 25.11 | 5.97 | 5.72 | 6.31 | 6.32 |
| 2 | 4000 | 5000 | 1000 | 1495 | 3160 | 625 | 440 | 460 | 140 | 230 | 196 | 3925 | 6.65 | 9.47 | 88.68 | 84.85 | 122.68 | 98.22 | 8.48 | 24.47 | 5.97 | 5.72 | 6.32 | 6.33 |
| 3 | 6000 | 7500 | 1000 | 2245 | 4660 | 1125 | 440 | 824 | 140 | 230 | 196 | 5925 | 6.55 | 9.47 | 84.88 | 84.85 | 122.06 | 98.21 | 8.52 | 24.51 | 5.72 | 5.72 | 6.32 | 6.33 |
| 4 | 2000 | 2500 | 1000 | 469 | - | 1125 | 440 | 835 | 90 | 230 | 128 | 1215 | 5.08 | 7.22 | 84.88 | 87.87 | - | - | 10.30 | 26.20 | 5.72 | 5.92 | - | - |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhuk, D.; Zhuk, O.; Kozlov, M.; Stepenko, S. Evaluation of Electric Power Quality in the Ship-Integrated Electrical Power System with a Main DC Bus and Power Semiconductor Electric Drives as Part of the Electric Propulsion Complex. Energies 2023, 16, 2961. https://doi.org/10.3390/en16072961
Zhuk D, Zhuk O, Kozlov M, Stepenko S. Evaluation of Electric Power Quality in the Ship-Integrated Electrical Power System with a Main DC Bus and Power Semiconductor Electric Drives as Part of the Electric Propulsion Complex. Energies. 2023; 16(7):2961. https://doi.org/10.3390/en16072961
Chicago/Turabian StyleZhuk, Dmytro, Oleksandr Zhuk, Maksym Kozlov, and Serhii Stepenko. 2023. "Evaluation of Electric Power Quality in the Ship-Integrated Electrical Power System with a Main DC Bus and Power Semiconductor Electric Drives as Part of the Electric Propulsion Complex" Energies 16, no. 7: 2961. https://doi.org/10.3390/en16072961
APA StyleZhuk, D., Zhuk, O., Kozlov, M., & Stepenko, S. (2023). Evaluation of Electric Power Quality in the Ship-Integrated Electrical Power System with a Main DC Bus and Power Semiconductor Electric Drives as Part of the Electric Propulsion Complex. Energies, 16(7), 2961. https://doi.org/10.3390/en16072961