
Design and Implementation of a Particulate Matter Measurement System for Energy-Efficient Searching of Air Pollution Sources Using a Multirotor Robot


Abstract
:1. Introduction
2. Model-Based Measurement System Design
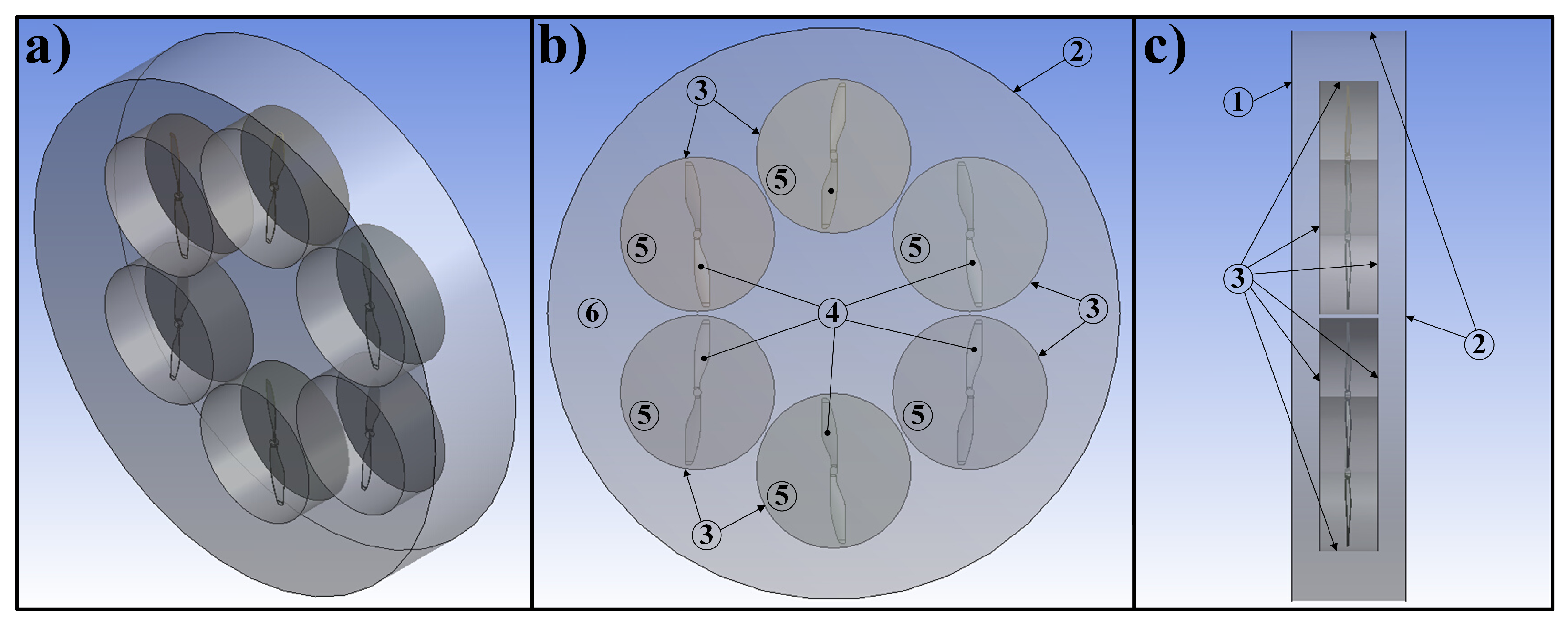
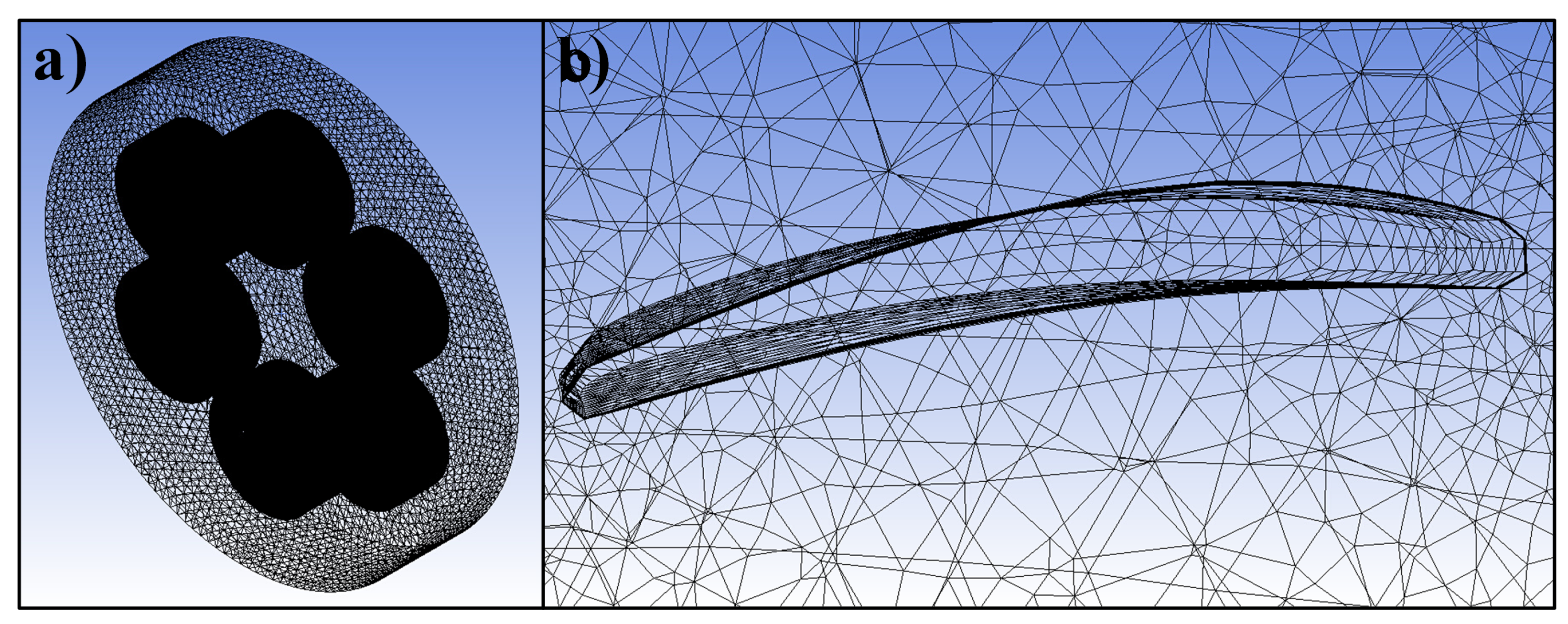
2.1. CFD Model
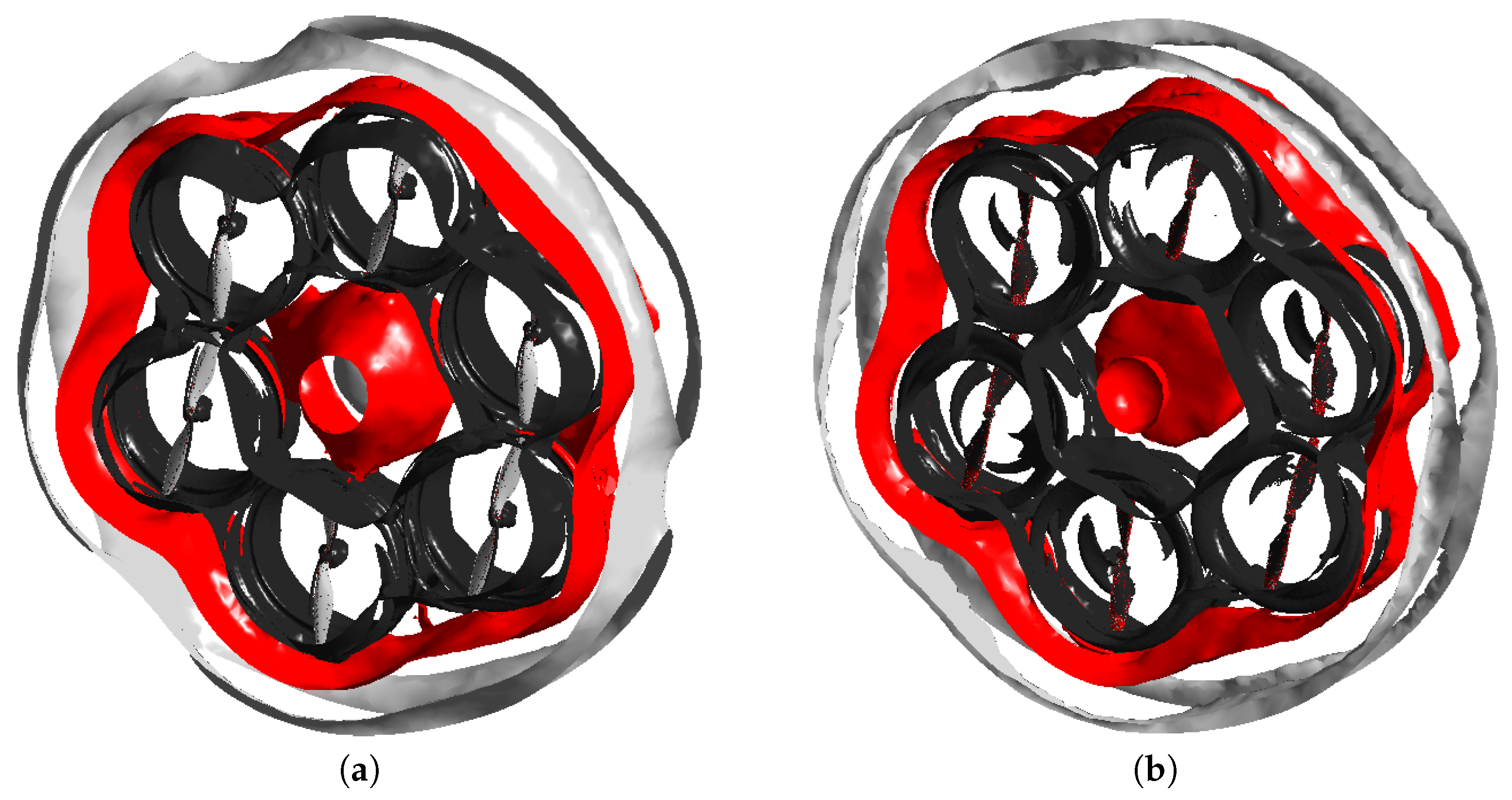
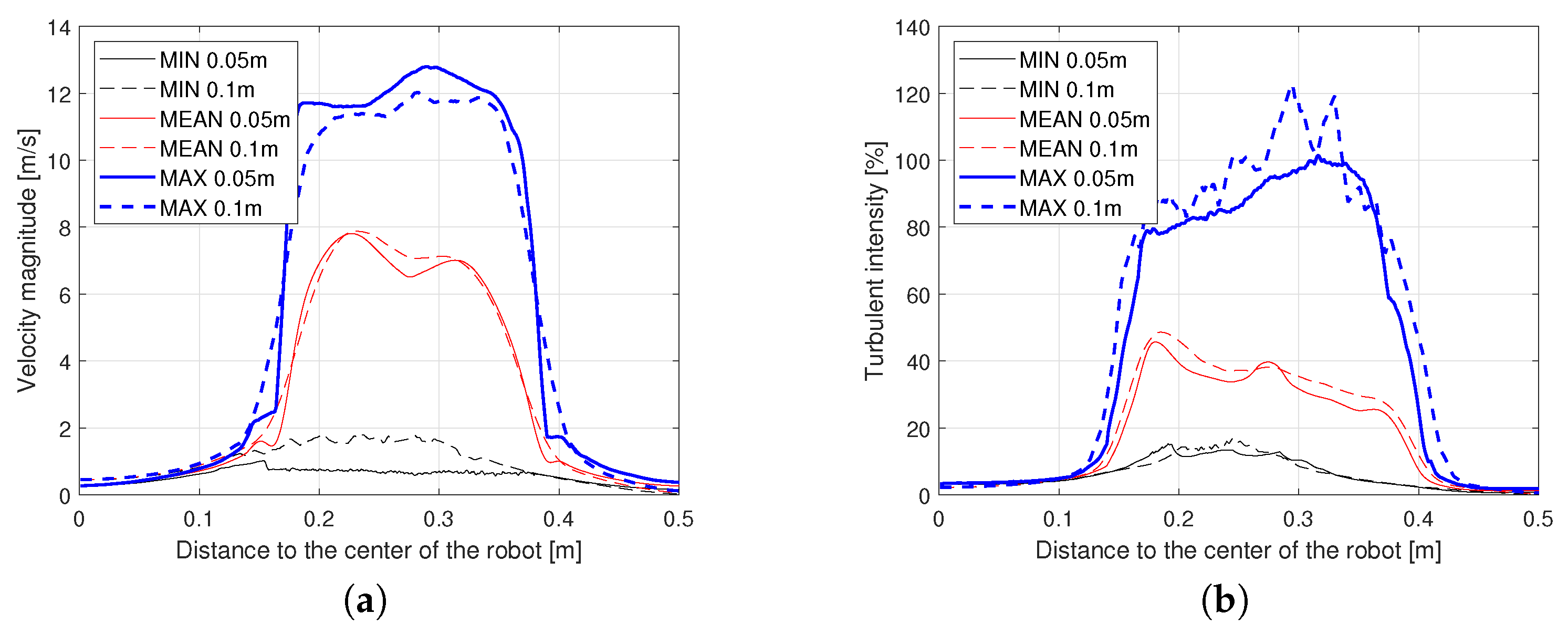
2.2. CFD Results and Design Decisions
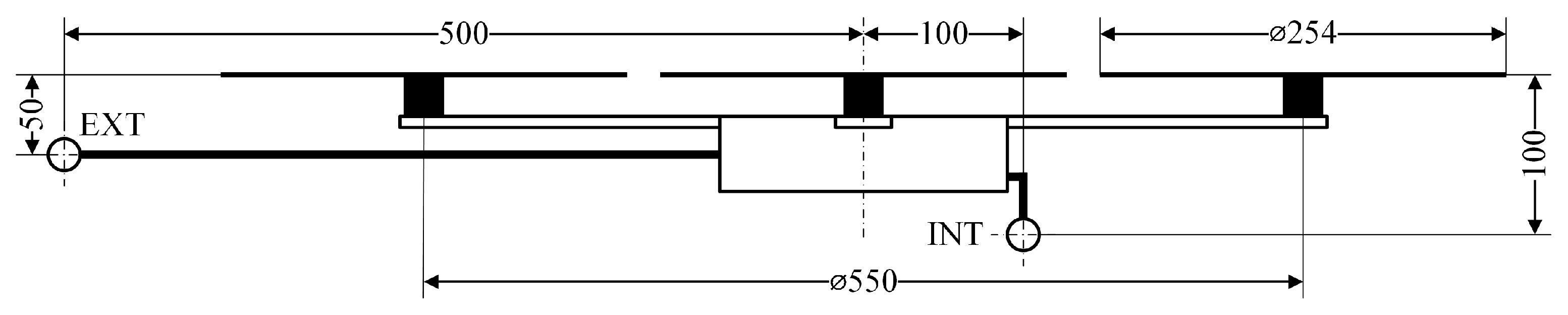
- Under the robot—0.10 m under the rotors’ plane, not further than 0.105 m. For this radius, the maximum turbulent intensity does not exceed 5.33%;
- On the extended arm—0.05 m below the rotors’ plane, at a distance greater than 0.428 m. For this radius, the maximum turbulent intensity does not exceed 3.77%.
2.3. Final Prototype of the Measurement System
3. Experimental Results
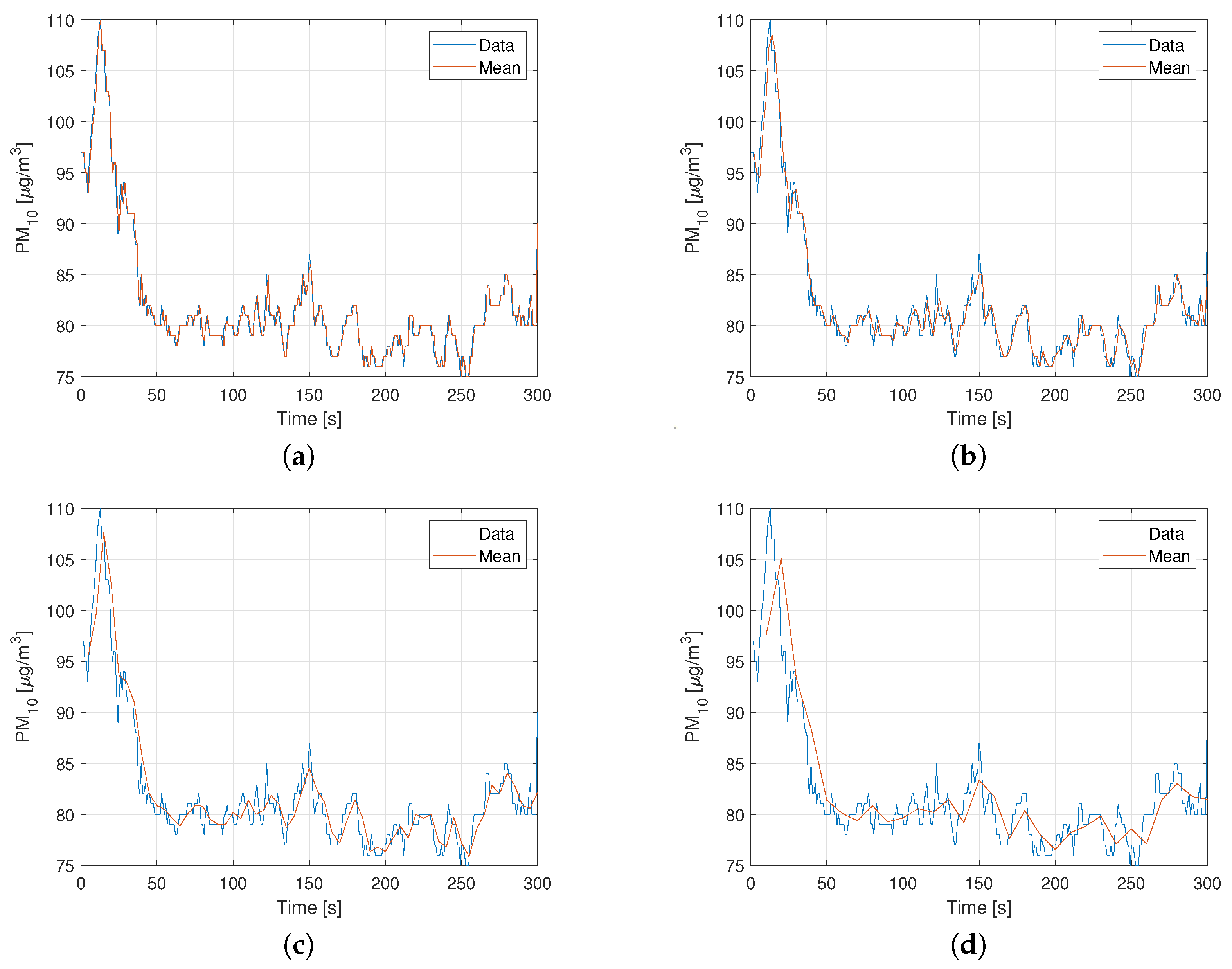
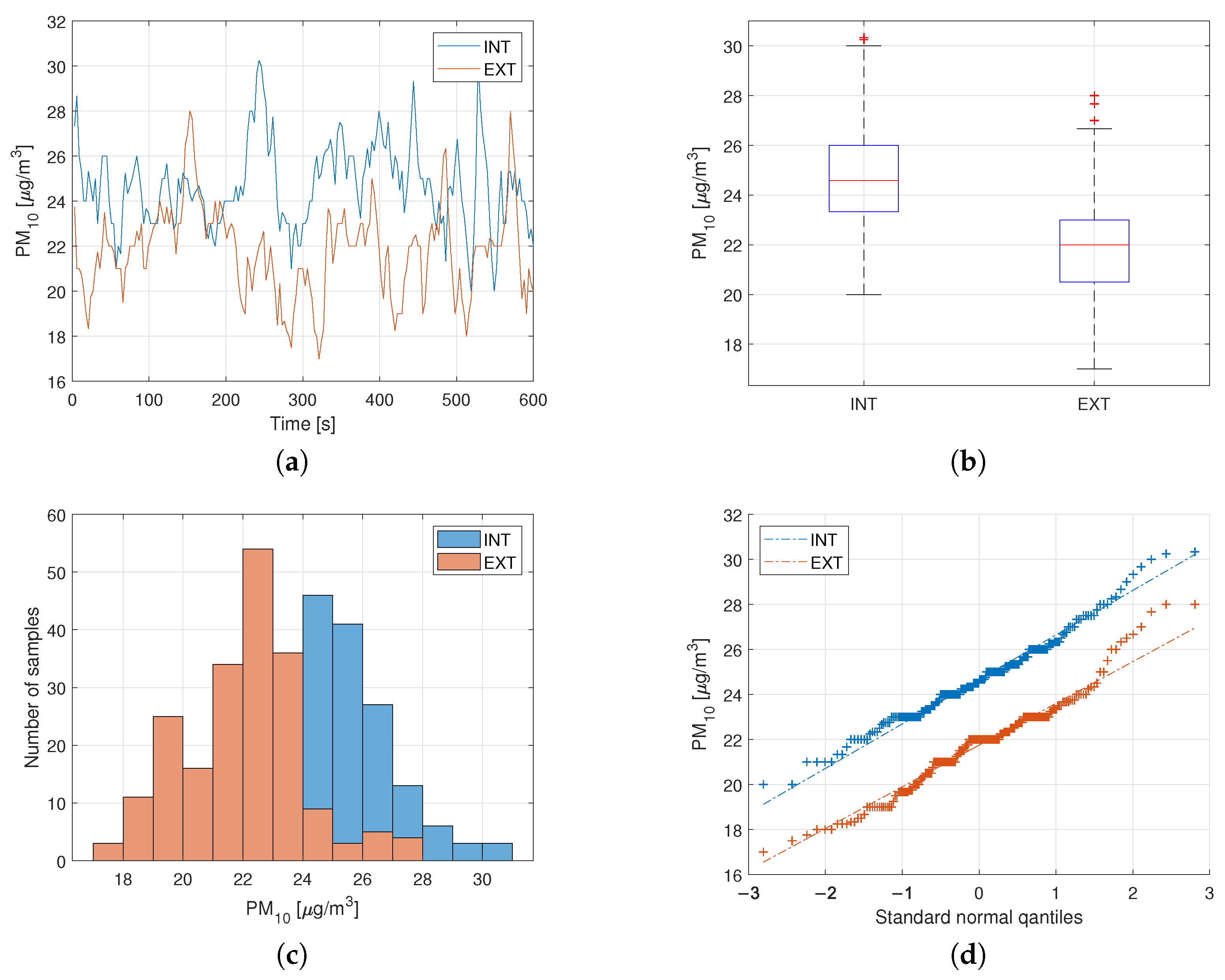
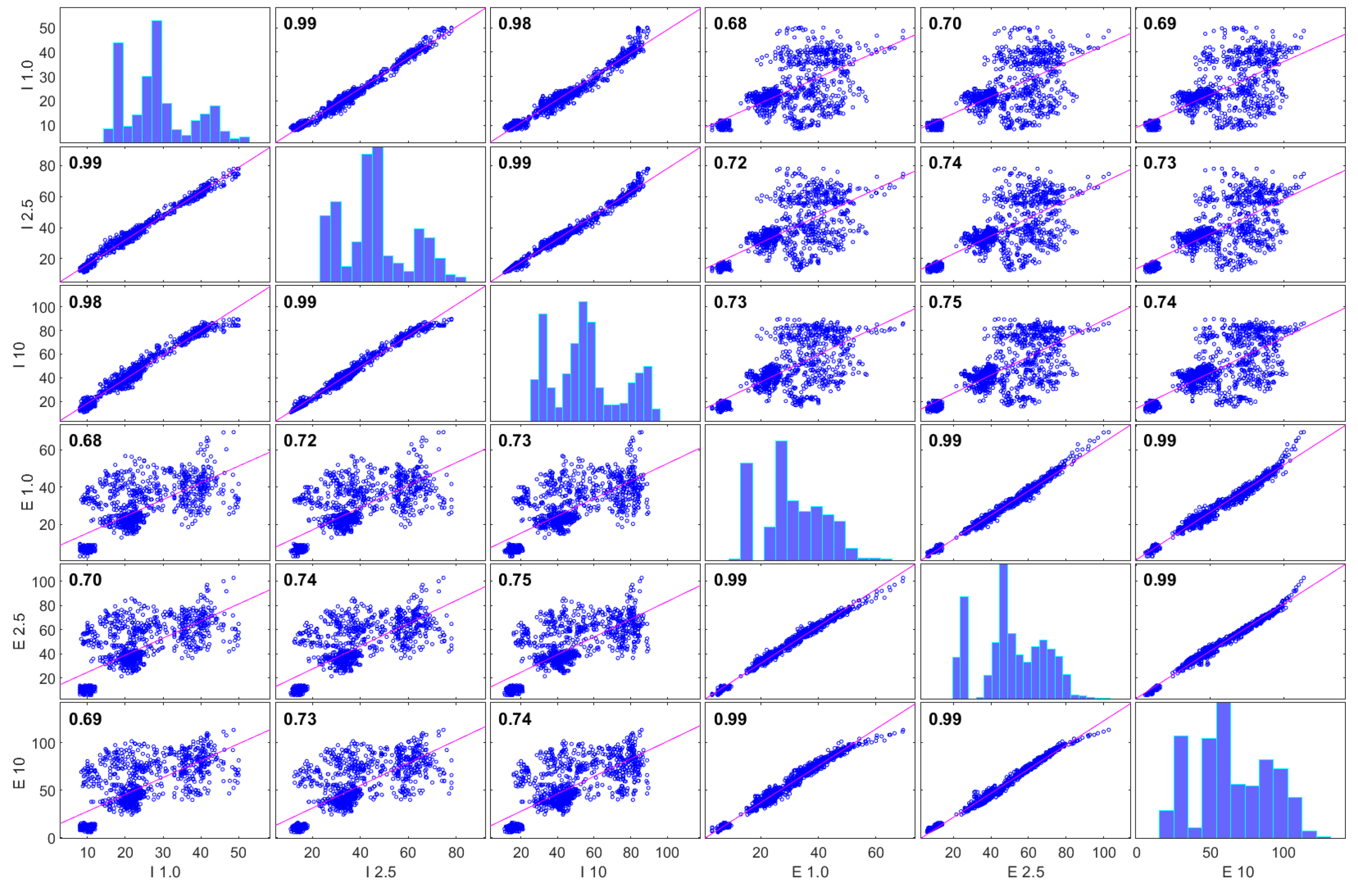
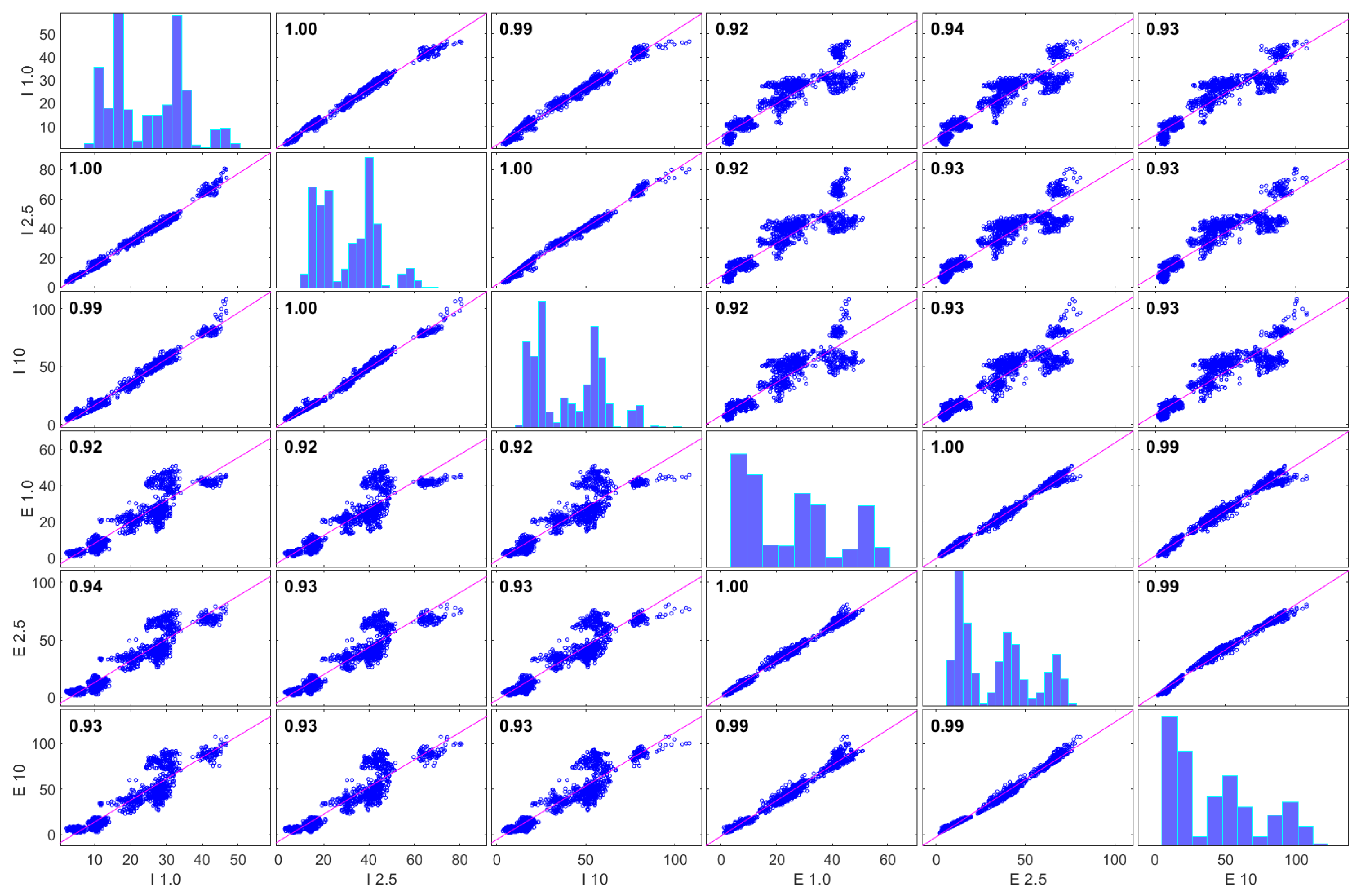
3.1. Measurement System Analysis
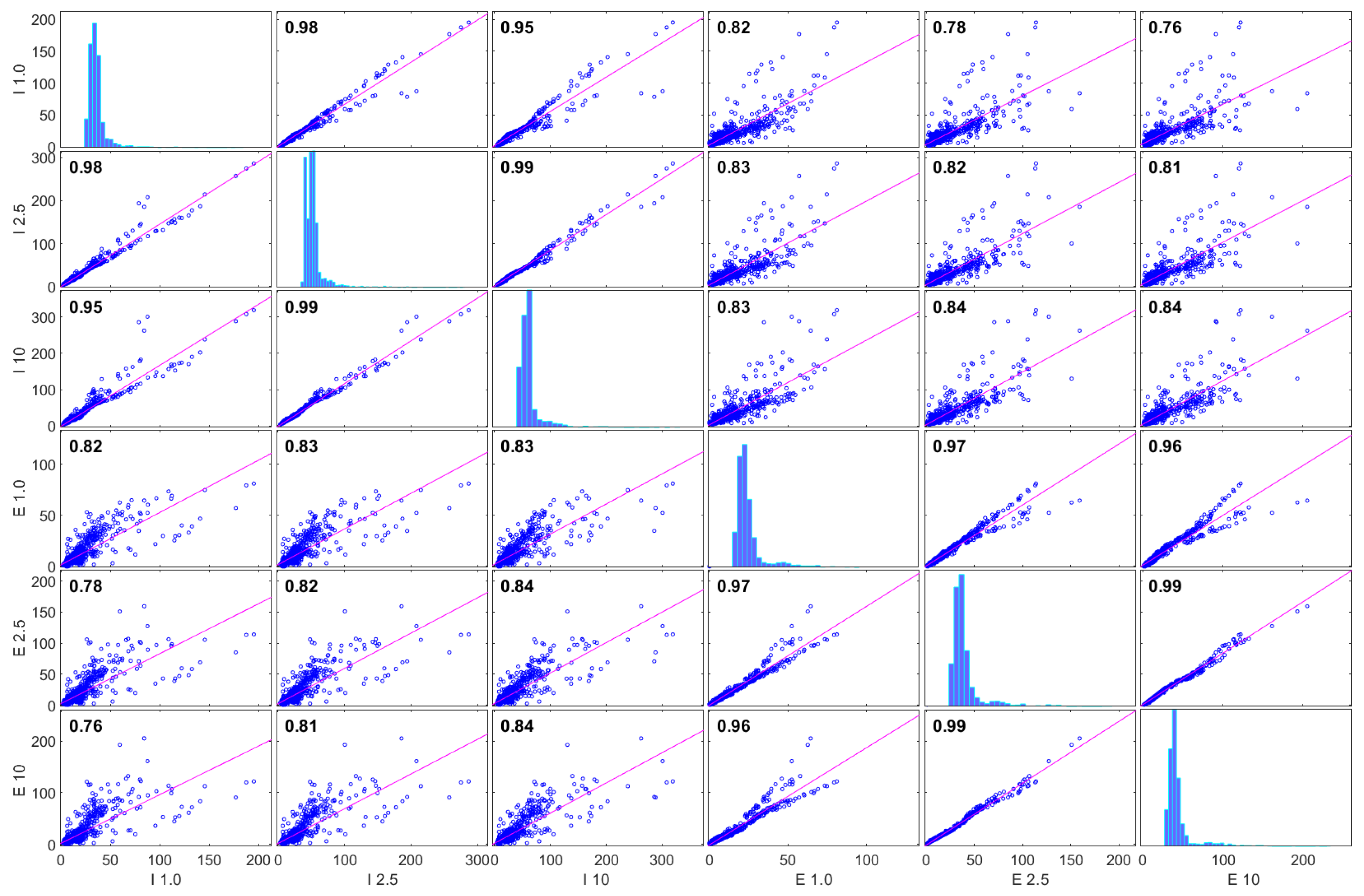
3.2. System Validation in Field Conditions
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| PM | particulate matter |
| MR | multi-rotor |
| COG | center of gravity |
| ESC | electronic speed controller |
| LiPo | lithium-polymer (battery) |
| GPS | global positioning system |
| RC | radio control |
| SM | sliding-mesh |
| MRF | multiple reference frame |
| FVM | finite volume method |
References
- Murray, C.J.L.; Aravkin, A.Y.; Zheng, P.; Abbafati, C.; Abbas, K.M.; Abbasi-Kangevari, M.; Abd-Allah, F.; Abdelalim, A.; Abdollahi, M.; Abdollahpour, I.; et al. Global burden of 87 risk factors in 204 countries and territories, 1990–2019: A systematic analysis for the Global Burden of Disease Study 2019. Lancet 2020, 396, 1223–1249. [Google Scholar] [CrossRef]
- Yang, T.; Zhou, K.; Ding, T. Air pollution impacts on public health: Evidence from 110 cities in Yangtze River Economic Belt of China. Sci. Total Environ. 2022, 851, 158125. [Google Scholar] [CrossRef] [PubMed]
- Song, B.; Zhang, H.; Jiao, L.; Jing, Z.; Li, H.; Wu, S. Effect of high-level fine particulate matter and its interaction with meteorological factors on AECOPD in Shijiazhuang, China. Sci. Rep. 2022, 12, 8711. [Google Scholar] [CrossRef] [PubMed]
- Chandia-Poblete, D.; Cole-Hunter, T.; Haswell, M.; Heesch, K.C. The influence of air pollution exposure on the short- and long-term health benefits associated with active mobility: A systematic review. Sci. Total Environ. 2022, 850, 157978. [Google Scholar] [CrossRef] [PubMed]
- Duangsuwan, S.; Jamjareekulgarn, P. Development of drone real-time air pollution monitoring for mobile smart sensing in areas with poor accessibility. Sens. Mater. 2020, 32, 511–520. [Google Scholar] [CrossRef] [Green Version]
- Fan, M.; Zhang, L. The Design of Multirotor Aircraft-based Environmental Detection System. MATEC Web Conf. 2018, 232, 04082. [Google Scholar] [CrossRef]
- Shah, S.N.; Xiong, X. Balluino: High Altitude Balloon/Drone Based Air Pollution and PM 2.5 Monitoring System. In Proceedings of the 2019 IEEE Long Island Systems, Applications and Technology Conference (LISAT), Long Island, NY, USA, 3 May 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Li, X.B.; Peng, Z.R.; Lu, Q.C.; Wang, D.; Hu, X.M.; Wang, D.; Li, B.; Fu, Q.; Xiu, G.; He, H. Evaluation of unmanned aerial system in measuring lower tropospheric ozone and fine aerosol particles using portable monitors. Atmos. Environ. 2020, 222, 117134. [Google Scholar] [CrossRef]
- Li, X.B.; Wang, D.S.; Lu, Q.C.; Peng, Z.R.; Wang, Z.Y. Investigating vertical distribution patterns of lower tropospheric PM2.5 using unmanned aerial vehicle measurements. Atmos. Environ. 2018, 173, 62–71. [Google Scholar] [CrossRef]
- Aurell, J.; Gullett, B.; Holder, A.; Kiros, F.; Mitchell, W.; Watts, A.; Ottmar, R. Wildland fire emission sampling at Fishlake National Forest, Utah using an unmanned aircraft system. Atmos. Environ. 2021, 247, 118193. [Google Scholar] [CrossRef]
- Kobziar, L.N.; Pingree, M.R.A.; Watts, A.C.; Nelson, K.N.; Dreaden, T.J.; Ridout, M. Accessing the Life in Smoke: A New Application of Unmanned Aircraft Systems (UAS) to Sample Wildland Fire Bioaerosol Emissions and Their Environment. Fire 2019, 2, 56. [Google Scholar] [CrossRef] [Green Version]
- Bieber, P.; Seifried, T.M.; Burkart, J.; Gratzl, J.; Kasper-Giebl, A.; Schmale, D.G.; Grothe, H. A Drone-Based Bioaerosol Sampling System to Monitor Ice Nucleation Particles in the Lower Atmosphere. Remote Sens. 2020, 12, 552. [Google Scholar] [CrossRef] [Green Version]
- Sasaki, K.; Inoue, M.; Shimura, T.; Iguchi, M. In Situ, Rotor-Based Drone Measurement of Wind Vector and Aerosol Concentration in Volcanic Areas. Atmosphere 2021, 12, 376. [Google Scholar] [CrossRef]
- Mahanteshaiah, M.K.; Holla, S.A.; Nirahankar, K.S.; Sivan, A.; Purushotham, G. Environmental pollution control using artificial intelligence drone. AIP Conf. Proc. 2020, 2311, 030031. [Google Scholar] [CrossRef]
- Bretschneider, L.; Schlerf, A.; Baum, A.; Bohlius, H.; Buchholz, M.; Düsing, S.; Ebert, V.; Erraji, H.; Frost, P.; Käthner, R.; et al. MesSBAR—Multicopter and Instrumentation for Air Quality Research. Atmosphere 2022, 13, 629. [Google Scholar] [CrossRef]
- Wu, C.; Liu, B.; Wu, D.; Yang, H.; Mao, X.; Tan, J.; Liang, Y.; Sun, J.Y.; Xia, R.; Sun, J.; et al. Vertical profiling of black carbon and ozone using a multicopter unmanned aerial vehicle (UAV) in urban Shenzhen of South China. Sci. Total Environ. 2021, 801, 149689. [Google Scholar] [CrossRef] [PubMed]
- Chang, C.C.; Chang, C.Y.; Wang, J.L.; Pan, X.X.; Chen, Y.C.; Ho, Y.J. An optimized multicopter UAV sounding technique (MUST) for probing comprehensive atmospheric variables. Chemosphere 2020, 254, 126867. [Google Scholar] [CrossRef]
- Aurell, J.; Mitchell, W.; Chirayath, V.; Jonsson, J.; Tabor, D.; Gullett, B. Field determination of multipollutant, open area combustion source emission factors with a hexacopter unmanned aerial vehicle. Atmos. Environ. 2017, 166, 433–440. [Google Scholar] [CrossRef]
- Lee, S.H.; Kwak, K.H. Assessing 3-D Spatial Extent of Near-Road Air Pollution around a Signalized Intersection Using Drone Monitoring and WRF-CFD Modeling. Int. J. Environ. Res. Public Health 2020, 17, 6915. [Google Scholar] [CrossRef]
- Kuuluvainen, H.; Poikkimäki, M.; Järvinen, A.; Kuula, J.; Irjala, M.; Dal Maso, M.; Keskinen, J.; Timonen, H.; Niemi, J.V.; Rönkkö, T. Vertical profiles of lung deposited surface area concentration of particulate matter measured with a drone in a street canyon. Environ. Pollut. 2018, 241, 96–105. [Google Scholar] [CrossRef]
- Cozma, A.; Firculescu, A.C.; Tudose, D.; Ruse, L. Autonomous Multi-Rotor Aerial Platform for Air Pollution Monitoring. Sensors 2022, 22, 860. [Google Scholar] [CrossRef]
- Pochwała, S.; Gardecki, A.; Lewandowski, P.; Somogyi, V.; Anweiler, S. Developing of Low-Cost Air Pollution Sensor—Measurements with the Unmanned Aerial Vehicles in Poland. Sensors 2020, 20, 3582. [Google Scholar] [CrossRef] [PubMed]
- Madokoro, H.; Kiguchi, O.; Nagayoshi, T.; Chiba, T.; Inoue, M.; Chiyonobu, S.; Nix, S.; Woo, H.; Sato, K. Development of Drone-Mounted Multiple Sensing System with Advanced Mobility for In Situ Atmospheric Measurement: A Case Study Focusing on PM2.5 Local Distribution. Sensors 2021, 21, 4881. [Google Scholar] [CrossRef] [PubMed]
- Hedworth, H.A.; Sayahi, T.; Kelly, K.E.; Saad, T. The effectiveness of drones in measuring particulate matter. J. Aerosol Sci. 2021, 152, 105702. [Google Scholar] [CrossRef]
- Pochwała, S.; Anweiler, S.; Deptuła, A.; Gardecki, A.; Lewandowski, P.; Przysiężniuk, D. Optimization of air pollution measurements with unmanned aerial vehicle low-cost sensor based on an inductive knowledge management method. Optim. Eng. 2021, 22, 1783–1805. [Google Scholar] [CrossRef]
- Alfano, B.; Barretta, L.; Del Giudice, A.; De Vito, S.; Di Francia, G.; Esposito, E.; Formisano, F.; Massera, E.; Miglietta, M.L.; Polichetti, T. A Review of Low-Cost Particulate Matter Sensors from the Developers’ Perspectives. Sensors 2020, 20, 6819. [Google Scholar] [CrossRef]
- Jońca, J.; Pawnuk, M.; Bezyk, Y.; Arsen, A.; Sówka, I. Drone-Assisted Monitoring of Atmospheric Pollution: A Comprehensive Review. Sustainability 2022, 14, 11516. [Google Scholar] [CrossRef]
- Amaral, S.S.; De Carvalho, J.A.; Costa, M.A.M.; Pinheiro, C. An Overview of Particulate Matter Measurement Instruments. Atmosphere 2015, 6, 1327–1345. [Google Scholar] [CrossRef] [Green Version]
- Lee, H.; Kang, J.; Kim, S.; Im, Y.; Yoo, S.; Lee, D. Long-Term Evaluation and Calibration of Low-Cost Particulate Matter (PM) Sensor. Sensors 2020, 20, 3617. [Google Scholar] [CrossRef]
- Stavroulas, I.; Grivas, G.; Michalopoulos, P.; Liakakou, E.; Bougiatioti, A.; Kalkavouras, P.; Fameli, K.M.; Hatzianastassiou, N.; Mihalopoulos, N.; Gerasopoulos, E. Field Evaluation of Low-Cost PM Sensors (Purple Air PA-II) Under Variable Urban Air Quality Conditions, in Greece. Atmosphere 2020, 11, 926. [Google Scholar] [CrossRef]
- Kaliszewski, M.; Włodarski, M.; Młyńczak, J.; Kopczyński, K. Comparison of Low-Cost Particulate Matter Sensors for Indoor Air Monitoring during COVID-19 Lockdown. Sensors 2020, 20, 7290. [Google Scholar] [CrossRef]
- Bulot, F.M.J.; Russell, H.S.; Rezaei, M.; Johnson, M.S.; Ossont, S.J.J.; Morris, A.K.R.; Basford, P.J.; Easton, N.H.C.; Foster, G.L.; Loxham, M.; et al. Laboratory Comparison of Low-Cost Particulate Matter Sensors to Measure Transient Events of Pollution. Sensors 2020, 20, 2219. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Suchanek, G.; Wołoszyn, J.; Gołaś, A. Evaluation of Selected Algorithms for Air Pollution Source Localisation Using Drones. Sustainability 2022, 14, 3049. [Google Scholar] [CrossRef]
- Jing, T.; Meng, Q.H.; Ishida, H. Recent Progress and Trend of Robot Odor Source Localization. IEEJ Trans. Electr. Electron. Eng. 2021, 16, 938–953. [Google Scholar] [CrossRef]
- Suchanek, G.; Filipek, R. CFD analysis of a multi-rotor flying robot for air pollution inspection. J. Phys. Conf. Ser. 2022, 2367, 012010. [Google Scholar] [CrossRef]
- Gosiewski, Z.; Kwaśniewski, K. Time Minimization of Rescue Action Realized by an Autonomous Vehicle. Electronics 2020, 9, 2099. [Google Scholar] [CrossRef]
- Suchanek, G.; Filipek, R. Computational Fluid Dynamics (CFD) Aided Design of a Multi-rotor Flying Robot for Locating Sources of Particulate Matter Pollution. Appl. Comput. Sci. 2022, 18, 86–104. [Google Scholar] [CrossRef]
- Batchelor, G.K. An Introduction to Fluid Dynamics; Cambridge University Press: Cambridge, UK, 1967. [Google Scholar]
- Wilcox, D.C. Turbulence Modeling for CFD, 3rd ed.; DCW Industries: La Cañada, CA, USA, 2006. [Google Scholar]
- Menter, F.R. Two-equation eddy-viscosity turbulence models for engineering applications. AIAA J. 1994, 32, 1598–1605. [Google Scholar] [CrossRef] [Green Version]
- Romik, D.; Czajka, I. Numerical Investigation of the Sensitivity of the Acoustic Power Level to Changes in Selected Design Parameters of an Axial Fan. Energies 2022, 15, 1357. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Section | |||||
|---|---|---|---|---|---|
| 0.5 | 0.05 m | 0.065 m | 0.470 m | 3.98% | 1.87% |
| 0.10 m | 0.032 m | 0.448 m | 2.52% | 2.58% | |
| 1.0 | 0.05 m | 0.118 m | 0.428 m | 6.71% | 3.77% |
| 0.10 m | 0.105 m | 0.421 m | 5.33% | 11.6% | |
| 2.0 | 0.05 m | 0.144 m | 0.389 m | 24.2% | 45.5% |
| 0.10 m | 0.142 m | 0.404 m | 33.6% | 41.1% |
| Parameter | INT | EXT | ||||
|---|---|---|---|---|---|---|
| Mean [] | 13.38 | 21.39 | 24.70 | 11.93 | 19.88 | 21.76 |
| Standard deviation [] | 1.03 | 1.82 | 1.89 | 0.74 | 1.87 | 2.02 |
| Expanded uncertainty [] | 0.15 | 0.26 | 0.27 | 0.10 | 0.26 | 0.29 |
| Rotors State | Pollution Source | Total Time | Coefficients | ||
|---|---|---|---|---|---|
| a | b | ||||
| OFF | ABSENT | 57 min 30 s | 0.5970 | 14.3742 | 0.55 |
| ON | ABSENT | 72 min 54 s | 0.7362 | 8.5585 | 0.87 |
| PRESENT | 90 min 45 s | 1.1984 | 4.9370 | 0.70 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Suchanek, G.; Filipek, R.; Gołaś, A. Design and Implementation of a Particulate Matter Measurement System for Energy-Efficient Searching of Air Pollution Sources Using a Multirotor Robot. Energies 2023, 16, 2959. https://doi.org/10.3390/en16072959
Suchanek G, Filipek R, Gołaś A. Design and Implementation of a Particulate Matter Measurement System for Energy-Efficient Searching of Air Pollution Sources Using a Multirotor Robot. Energies. 2023; 16(7):2959. https://doi.org/10.3390/en16072959
Chicago/Turabian StyleSuchanek, Grzegorz, Roman Filipek, and Andrzej Gołaś. 2023. "Design and Implementation of a Particulate Matter Measurement System for Energy-Efficient Searching of Air Pollution Sources Using a Multirotor Robot" Energies 16, no. 7: 2959. https://doi.org/10.3390/en16072959
APA StyleSuchanek, G., Filipek, R., & Gołaś, A. (2023). Design and Implementation of a Particulate Matter Measurement System for Energy-Efficient Searching of Air Pollution Sources Using a Multirotor Robot. Energies, 16(7), 2959. https://doi.org/10.3390/en16072959