

Super-Twisting Sliding Mode Control to Improve Performances and Robustness of a Switched Reluctance Machine for an Electric Vehicle Drivetrain Application †


Abstract
:1. Introduction
- Performance comparison of the designed Sliding Mode Control (SMC) and the Super-Twisting Sliding Mode Control (STSMC) for the current and the velocity control loops of SRM control strategy with the designed classical control. These controllers are developed and validated by simulation in [12];
- Robustness Comparison of the designed Sliding Mode Control (SMC) and Super-Twisting Sliding Mode Control (STSMC) for the current and the velocity control loops of SRM control strategy with the classical control by varying SRM physical parameters;
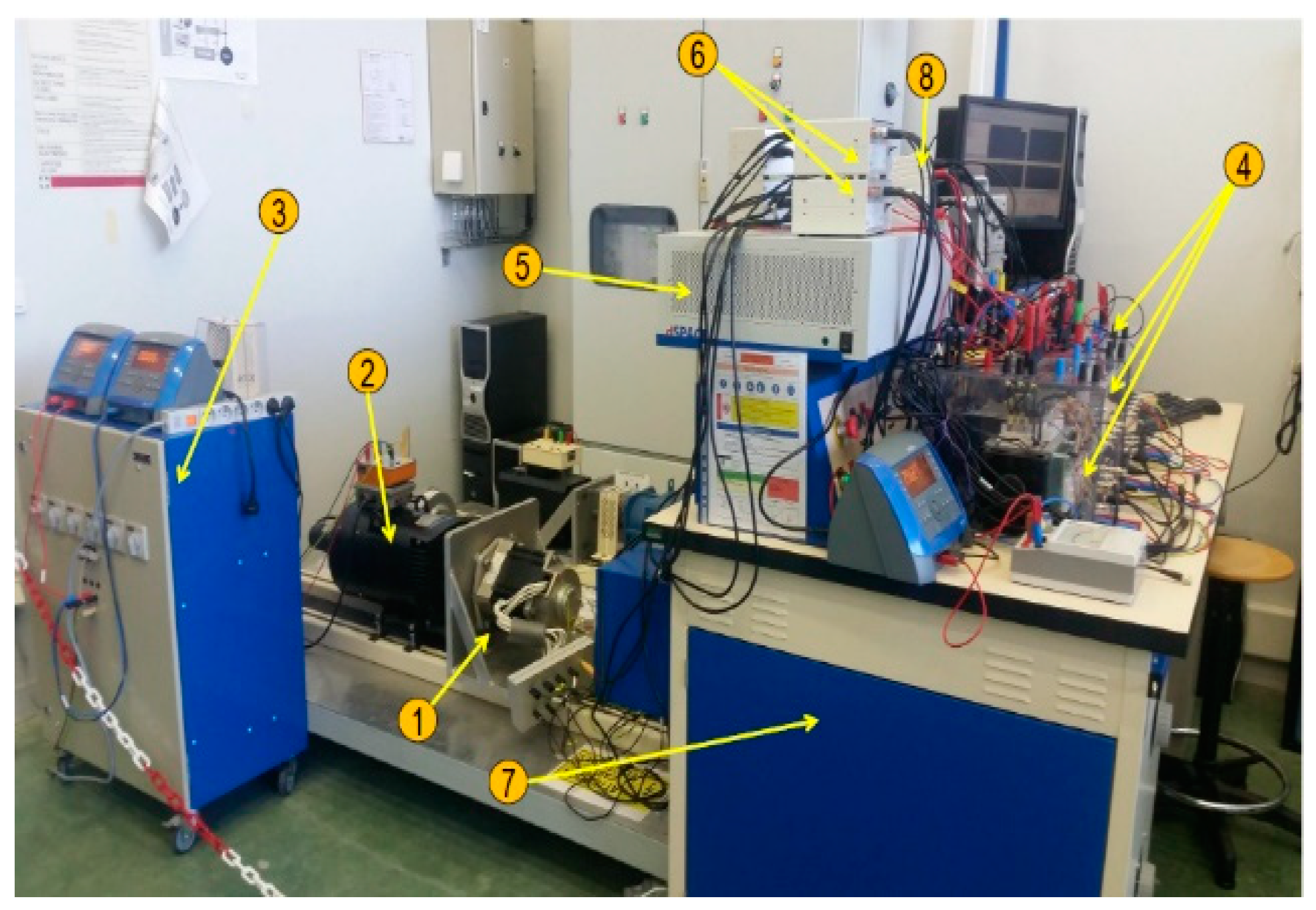
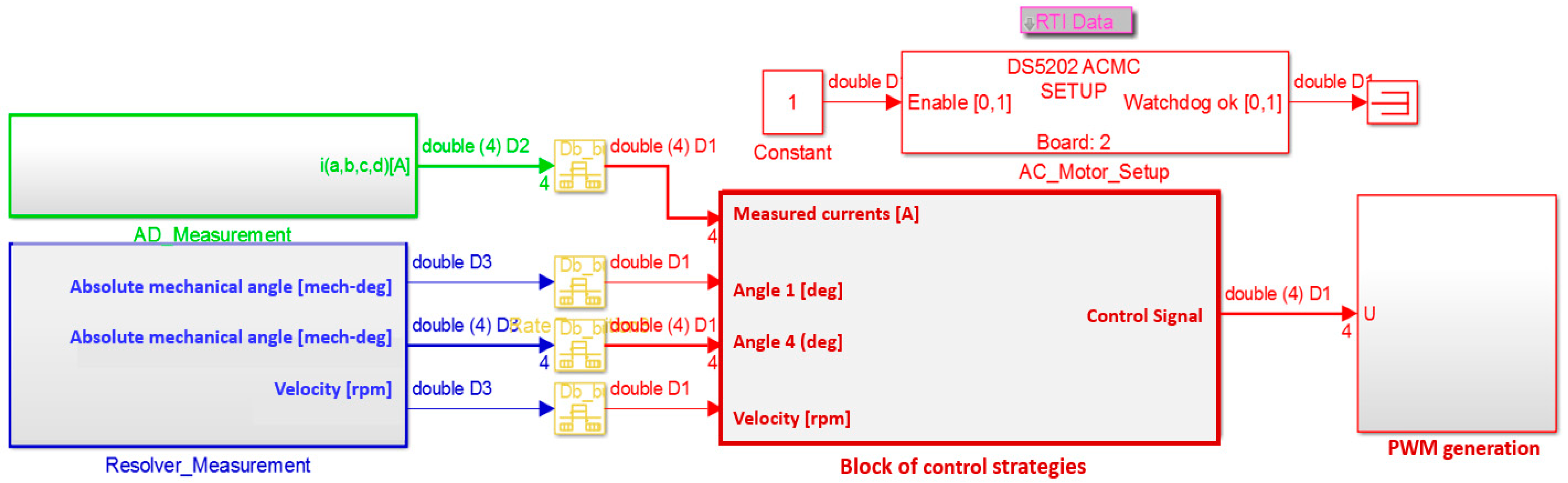
- Implementation and validation of the three designed controllers [12] on a developed test bench using a multicore dSpace 1005 with a SRM and a DC machine to create a load torque;
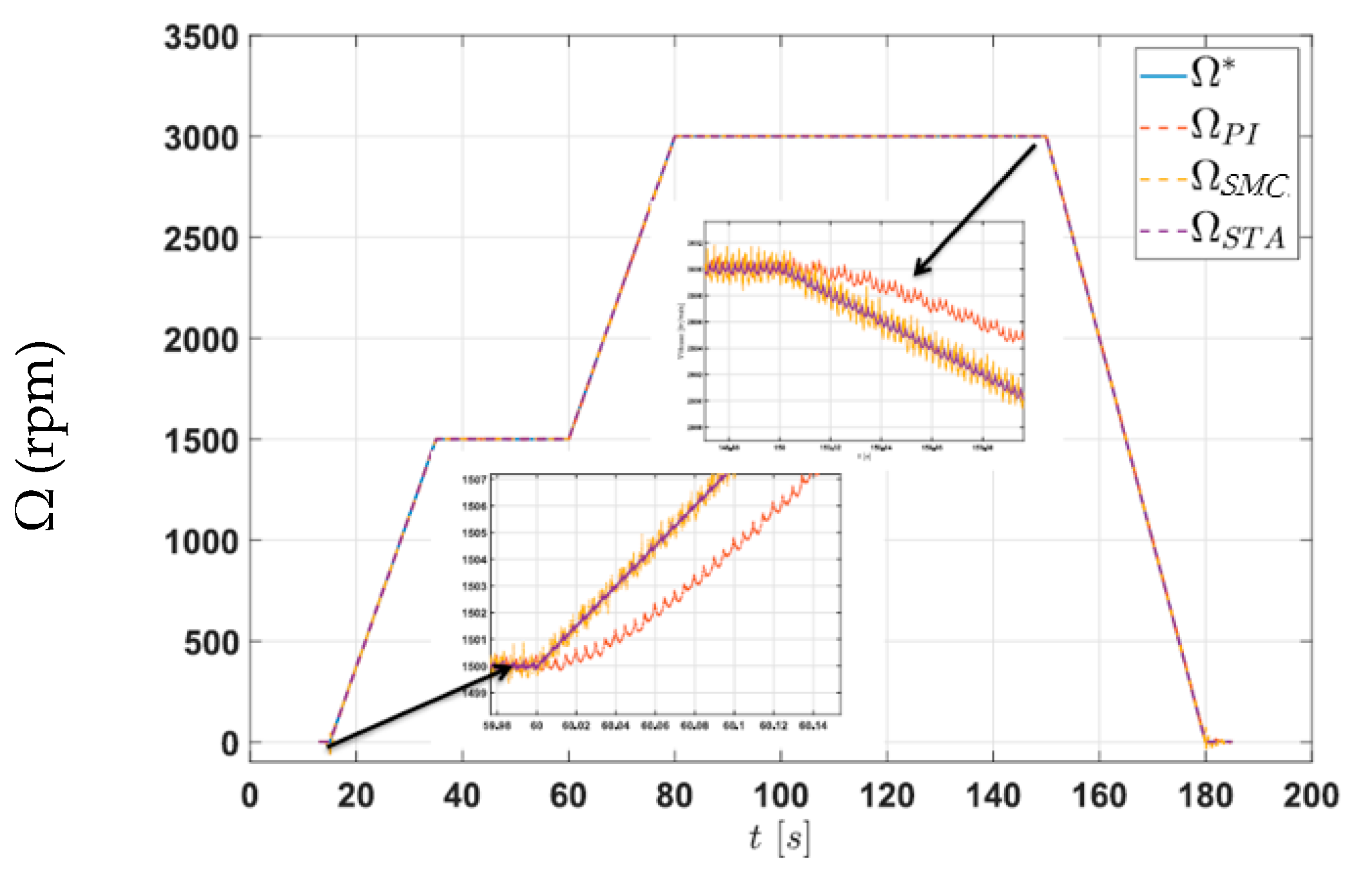
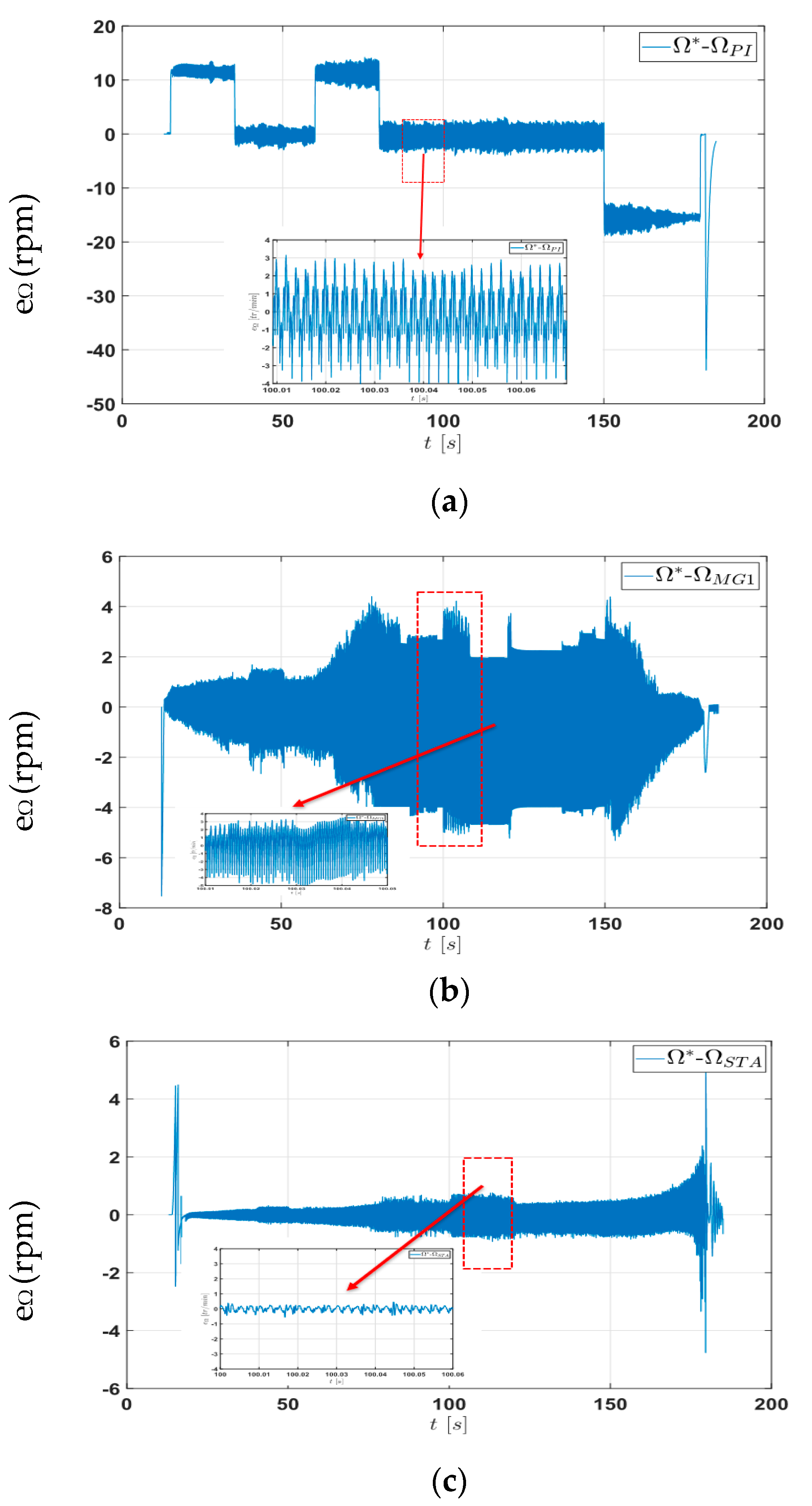
- Finally, performances comparison is carried with the collected experimental data showing that the Super-Twisting Sliding Mode Control is the best algorithm to select for the improvement of electric vehicle drivetrain performance.
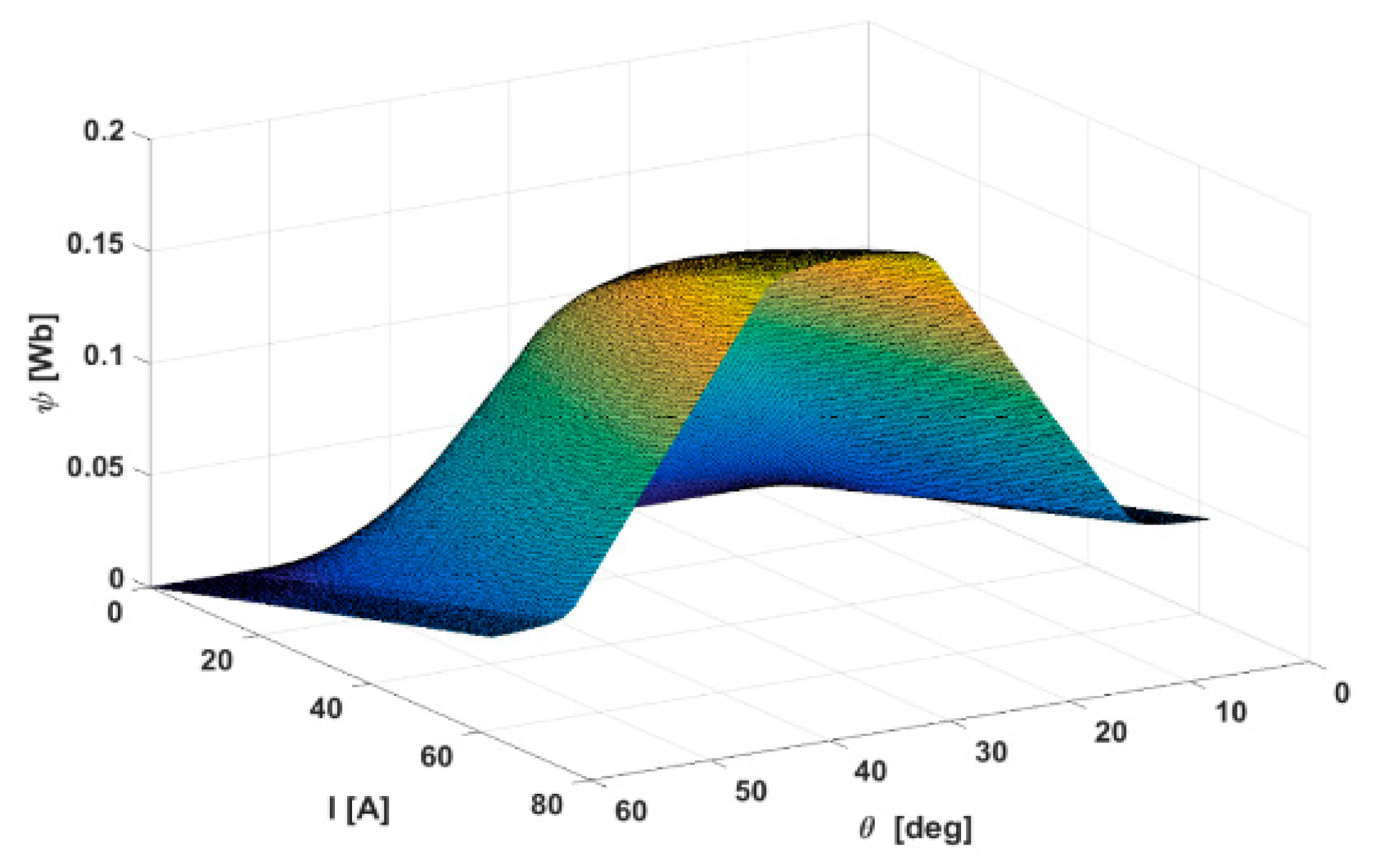
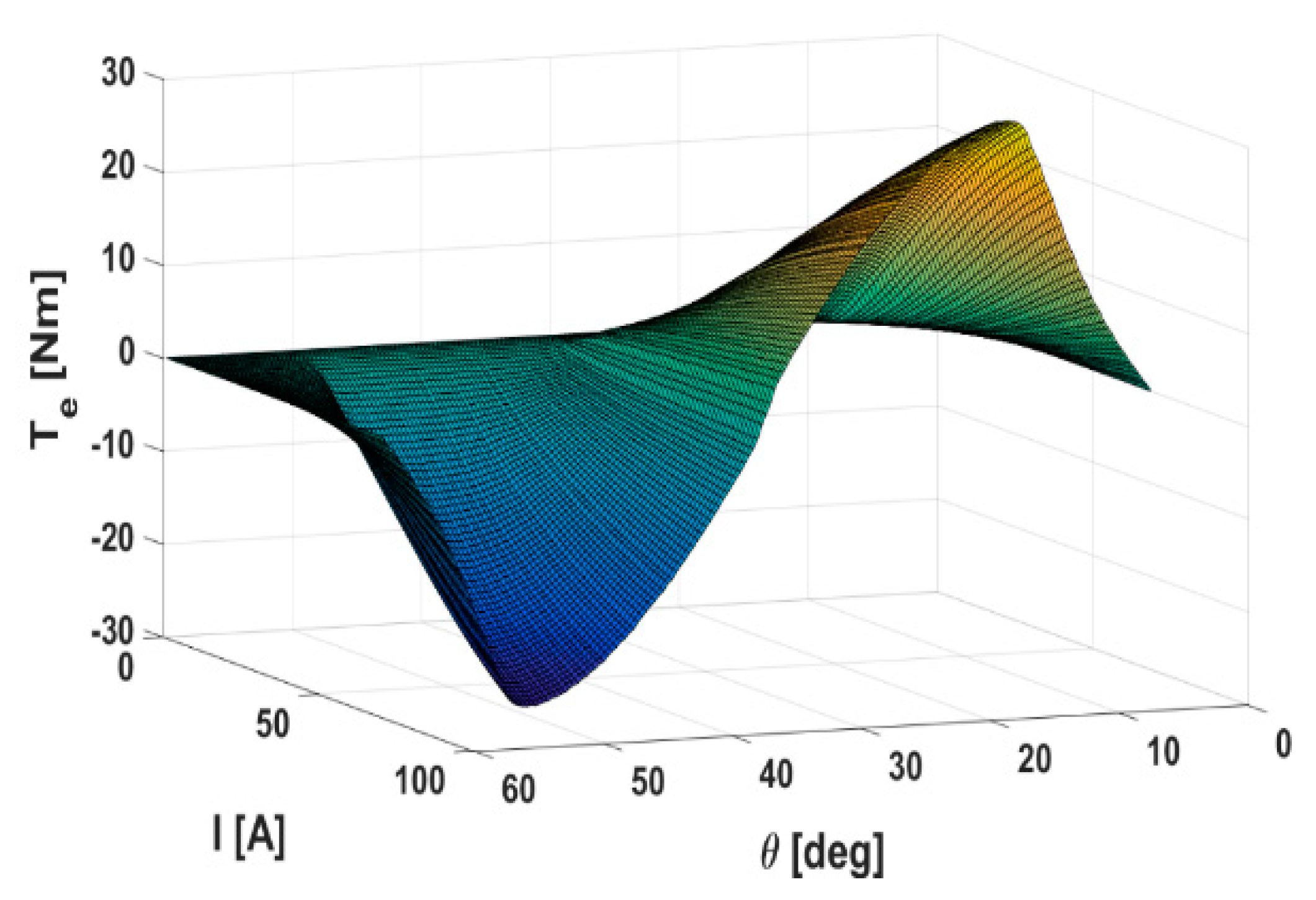
2. SRM Modeling
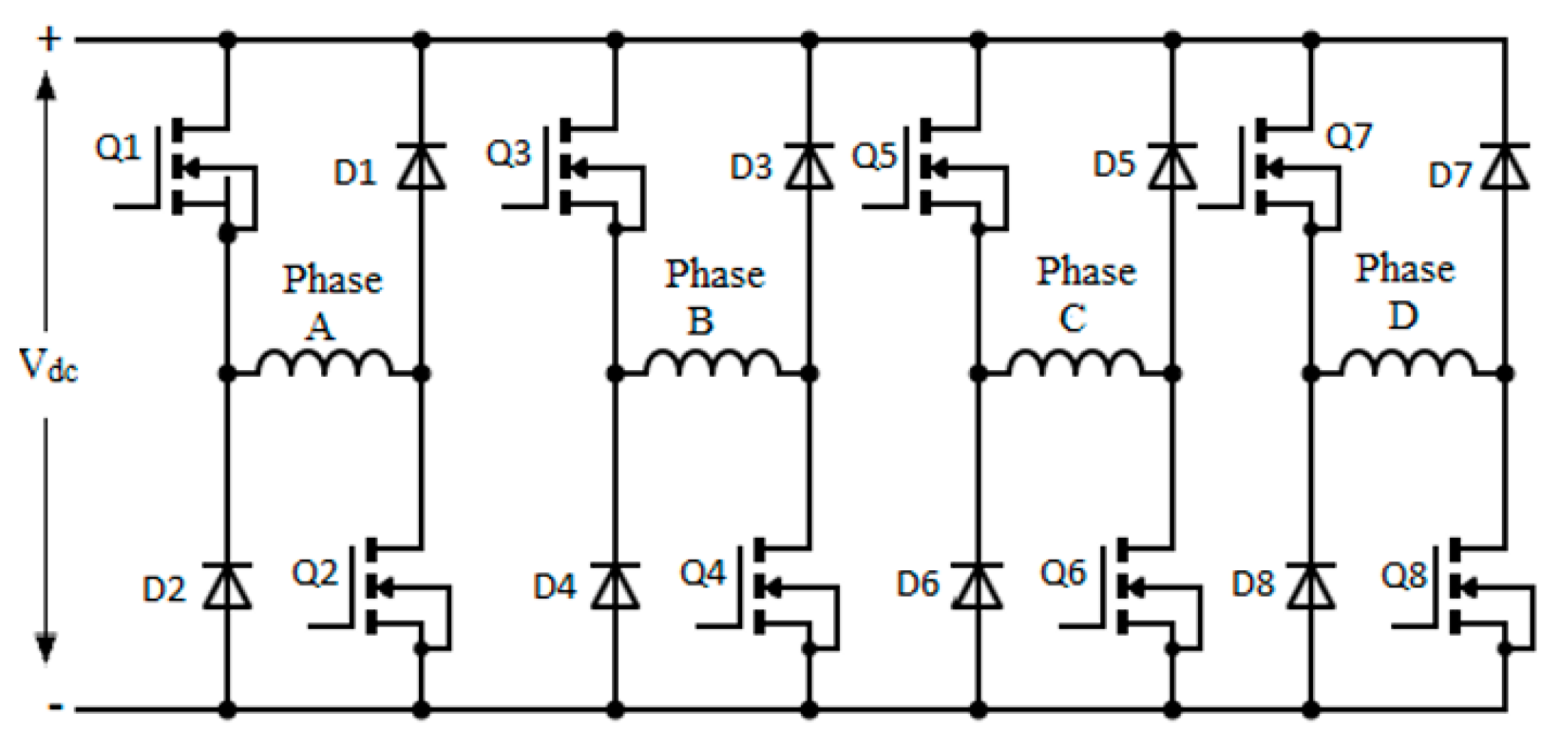
3. SRM Power Stage Converter
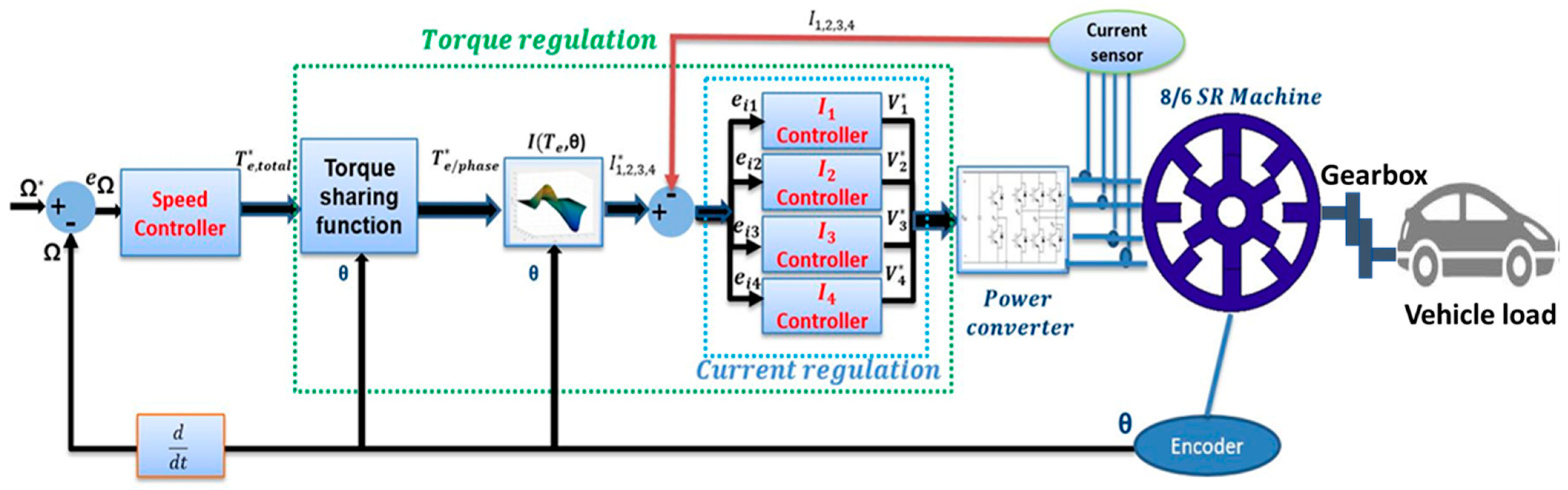
4. SRM Control Strategy
4.1. PI Controllers
4.2. Sliding Mode Control (SMC)
4.2.1. SMC Controller for Velocity Loop
4.2.2. SMC Controller for Current Loop
4.3. Super Twisting Sliding Mode Control (STSMC)
4.3.1. STSMC Controller for Velocity Loop
4.3.2. STSMC Controller for Current Loop
5. Performances of the Designed Controllers
6. Robustness of the Designed Controllers
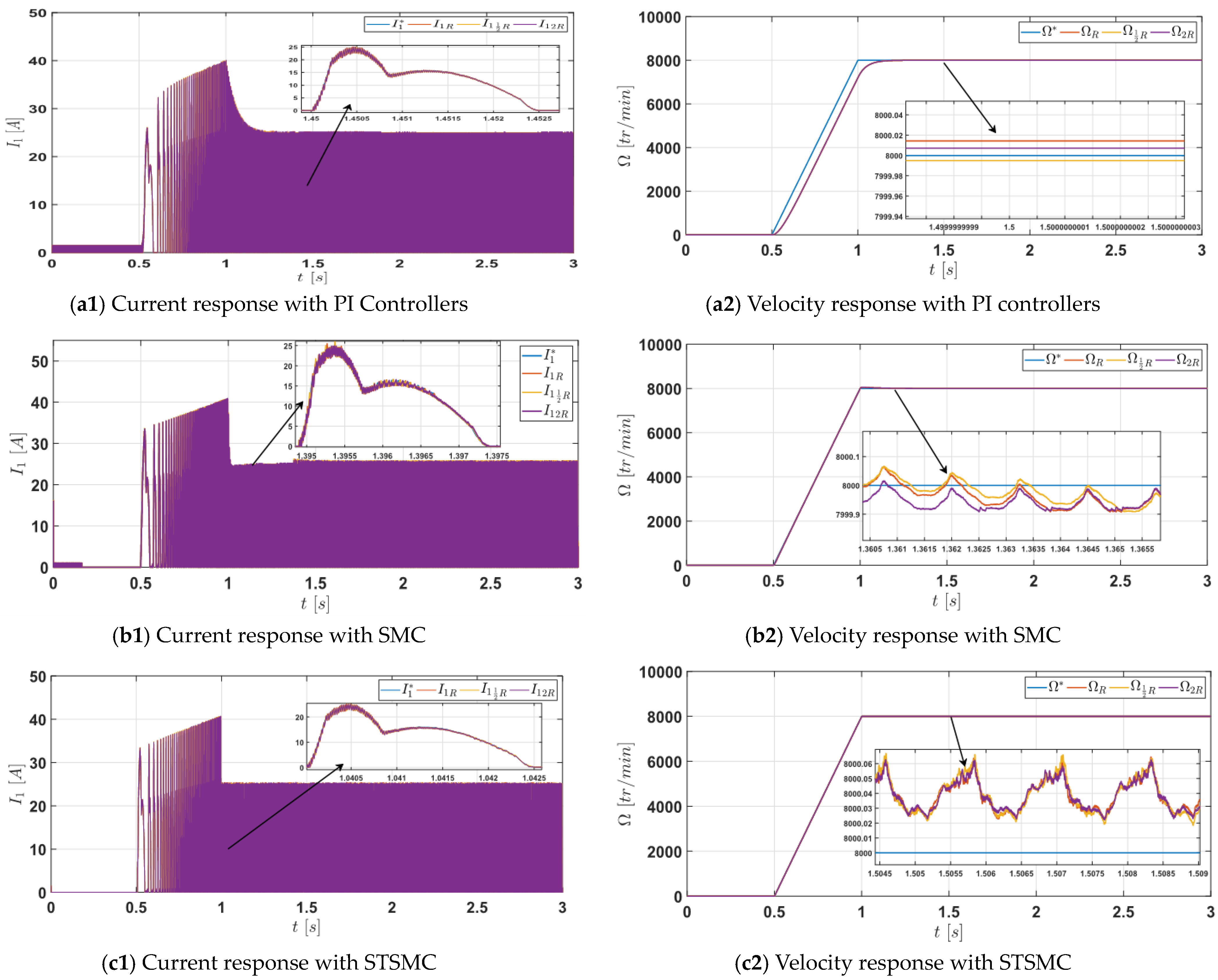
6.1. Stator Resistance Windings Variation
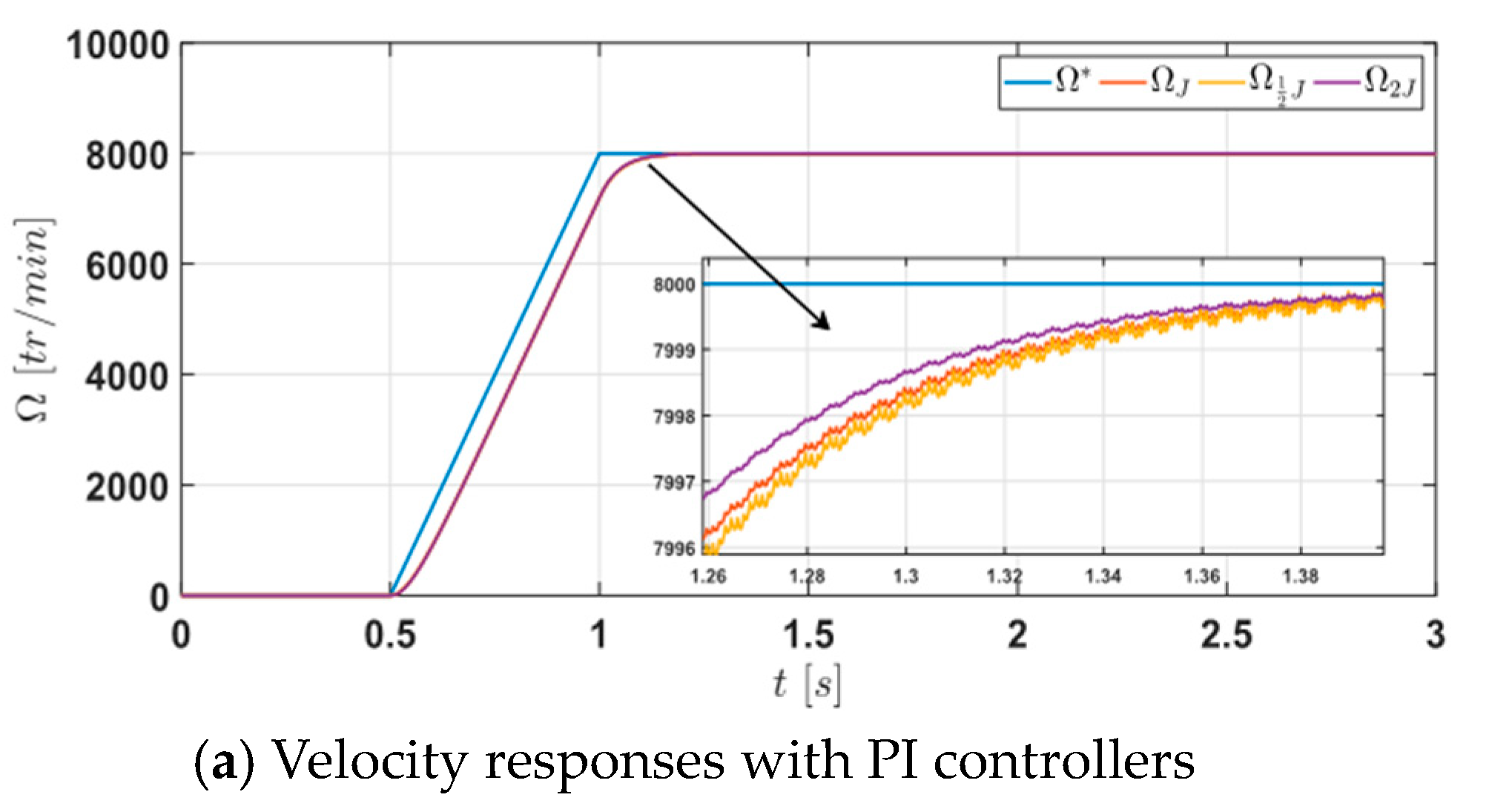
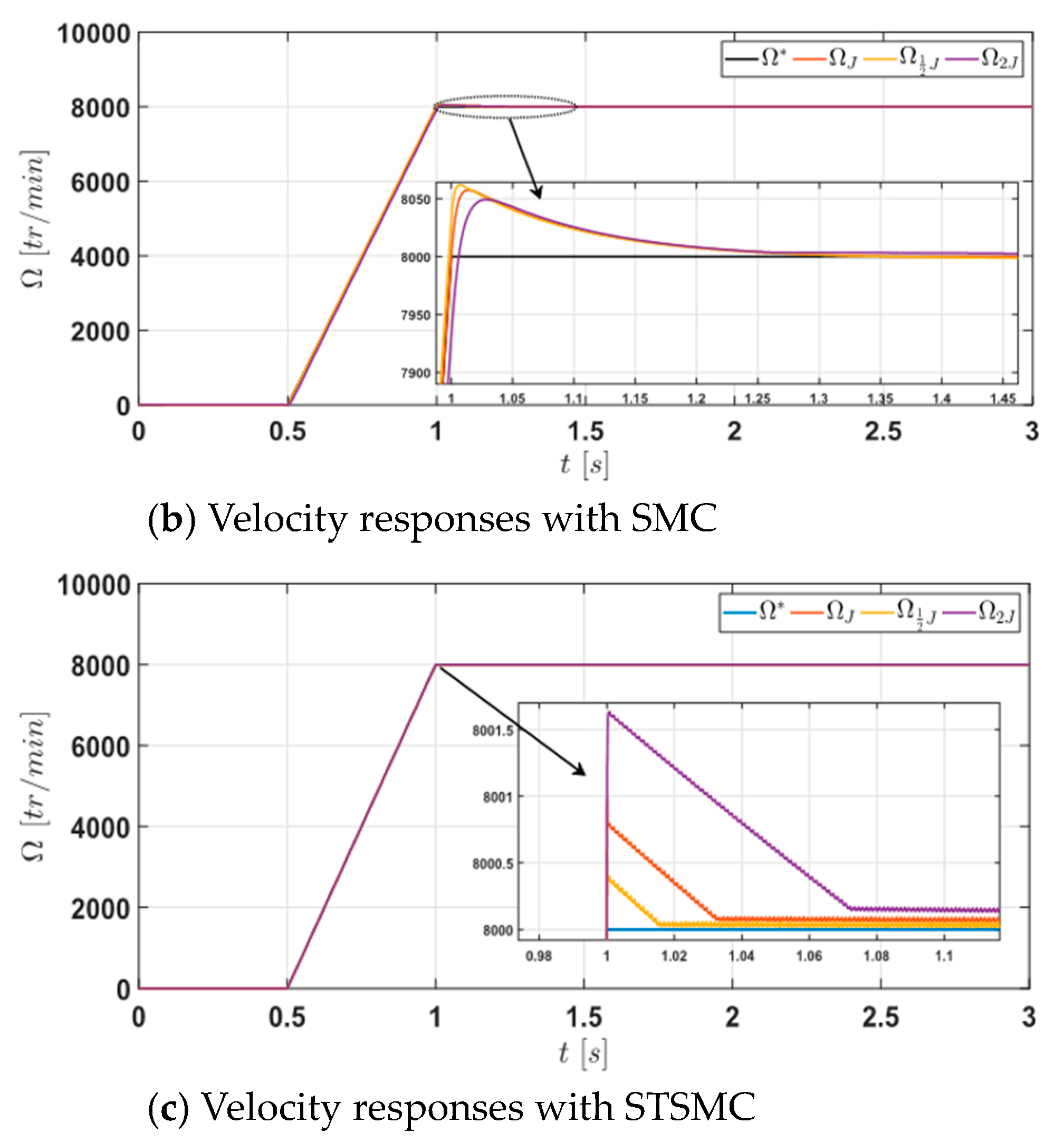
6.2. Load Inertia Variation
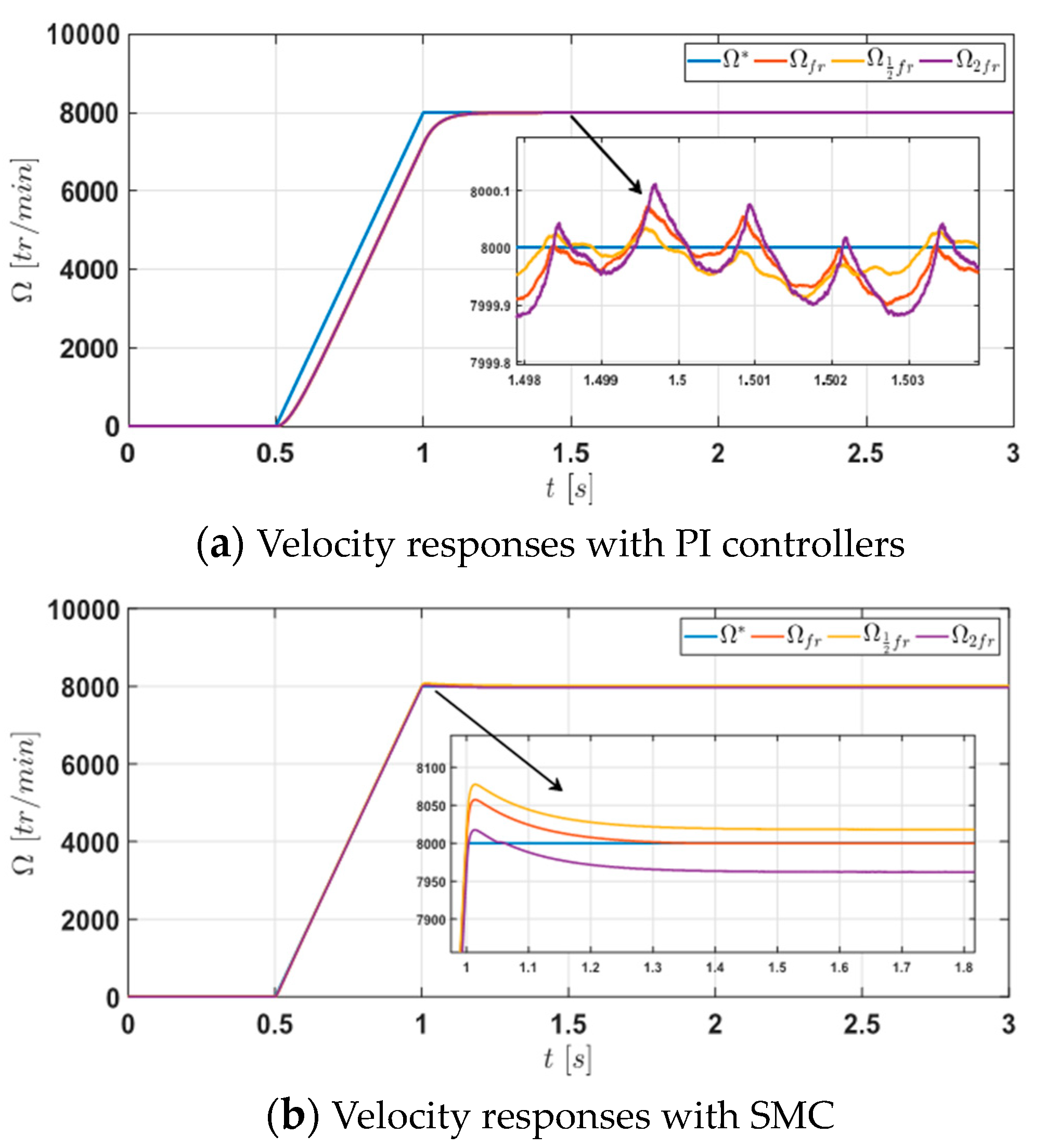
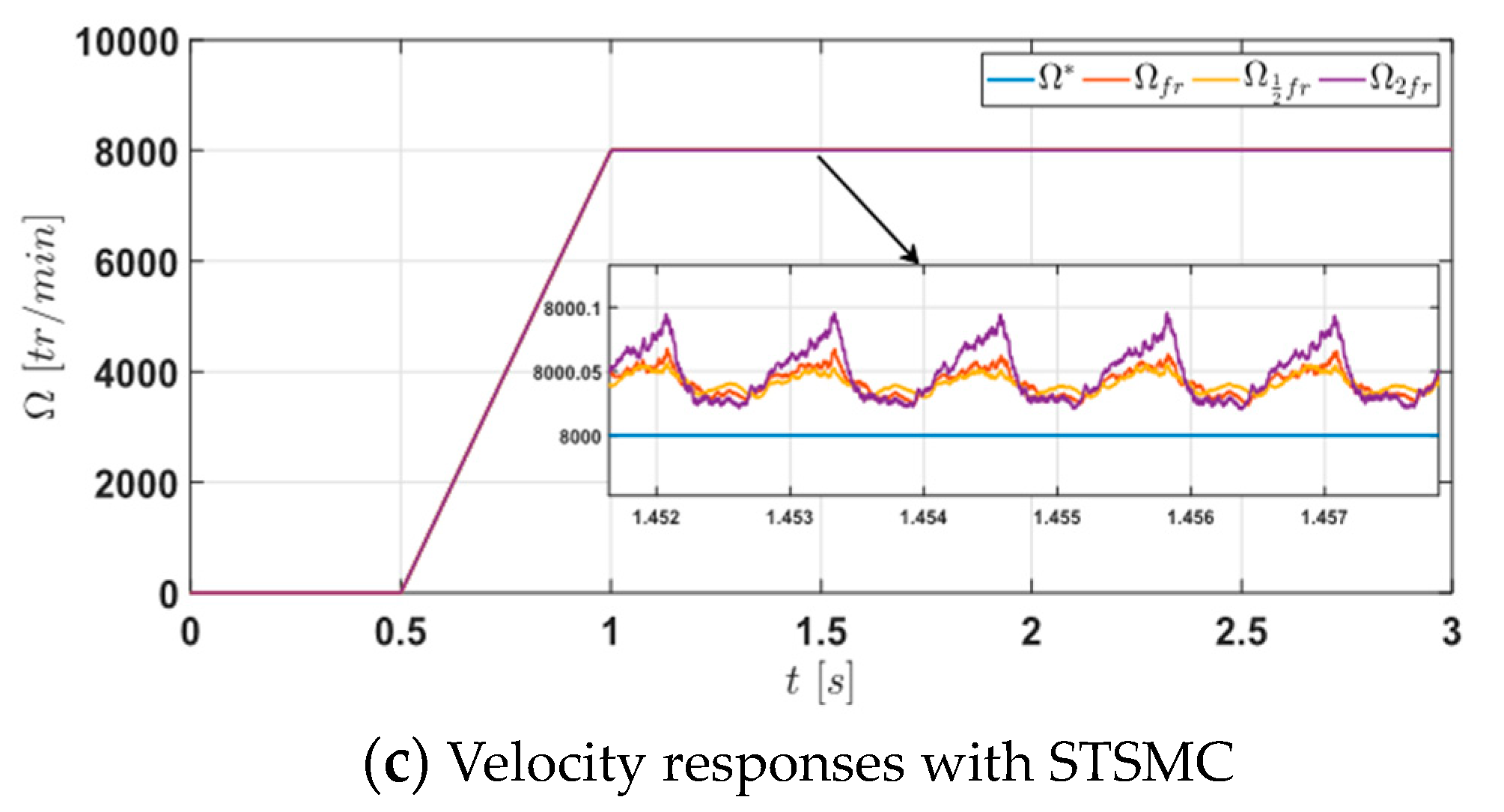
6.3. Viscous Friction Coefficient Variation
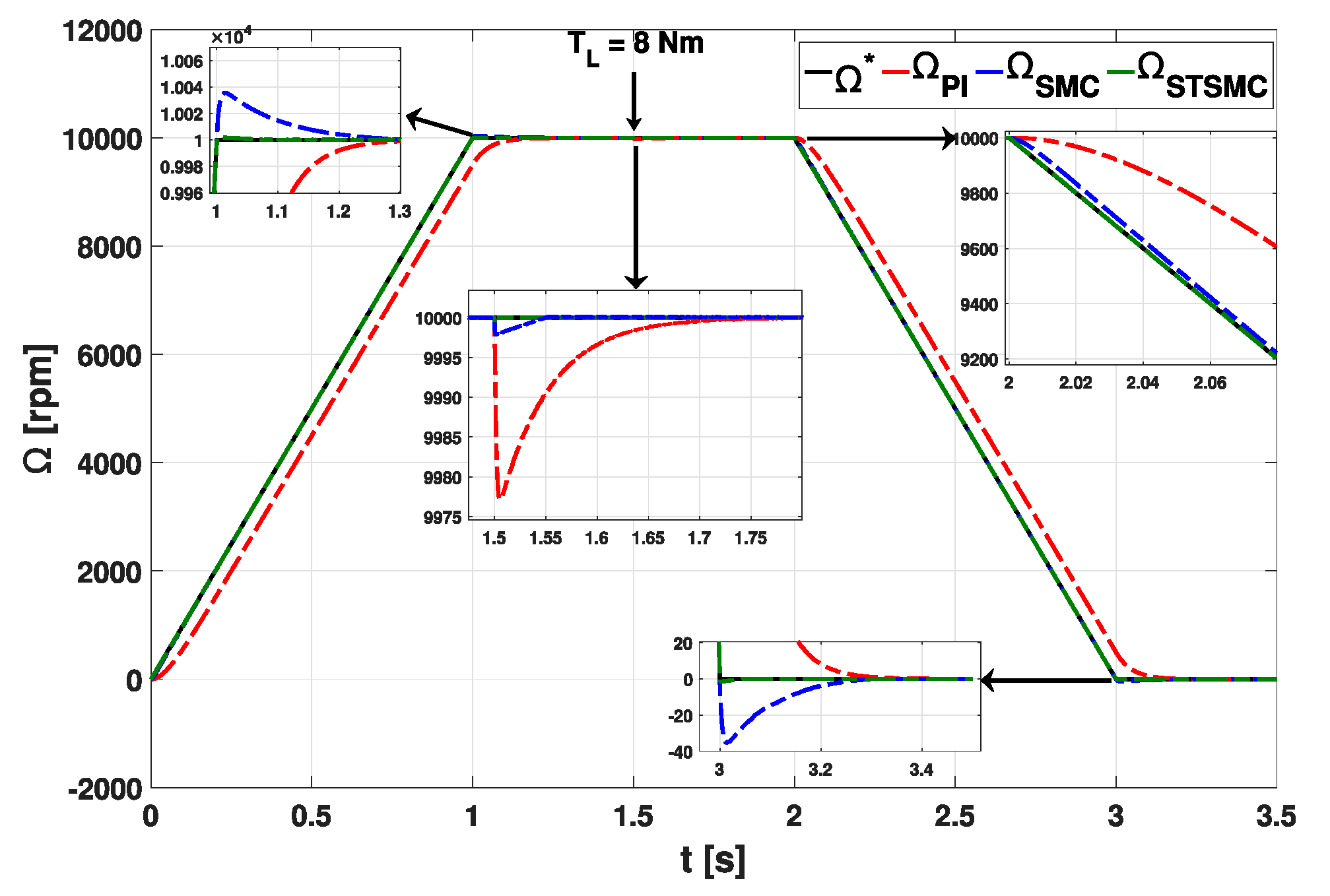
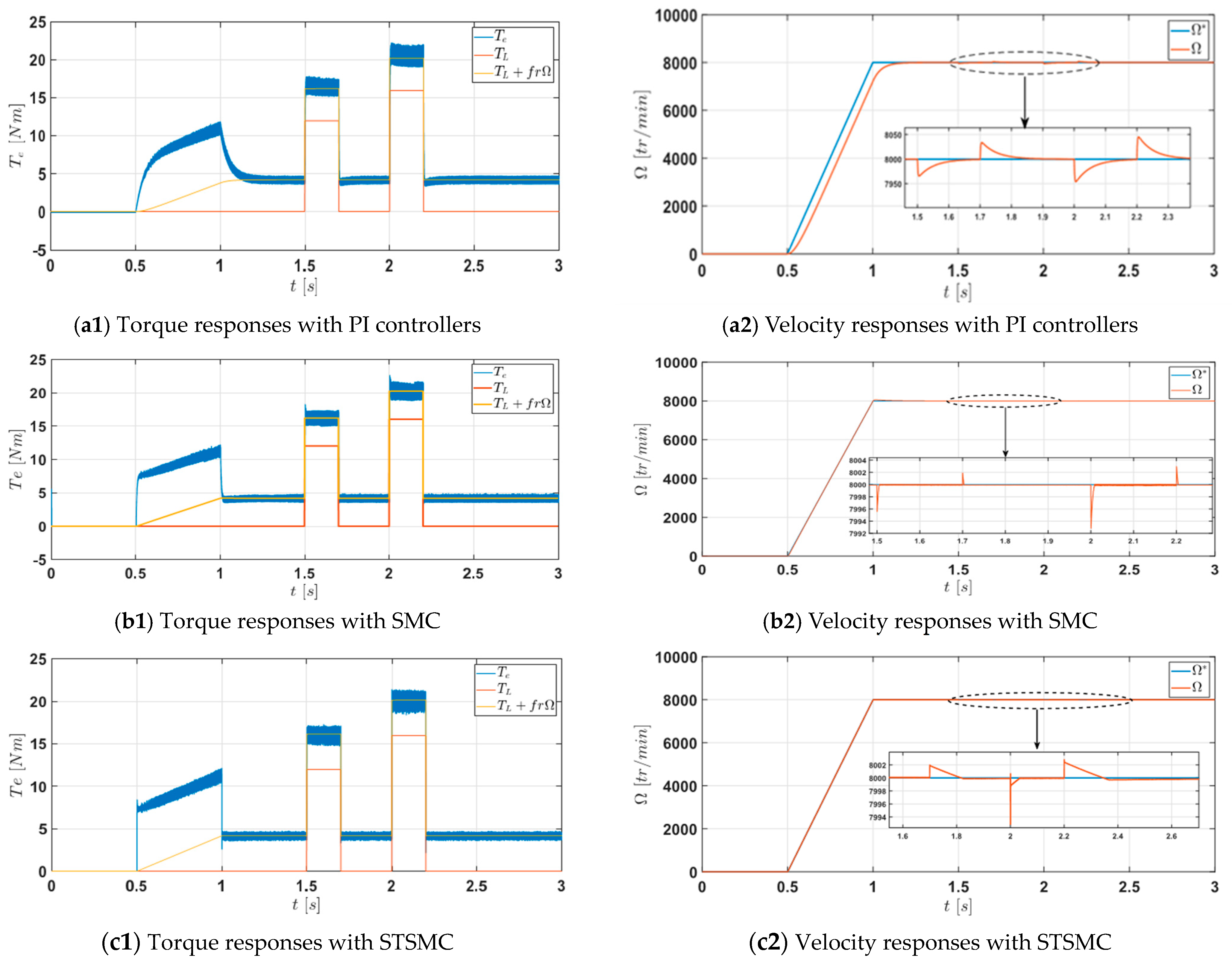
6.4. Load Torque Variation
7. Experimental Validation
8. Conclusions
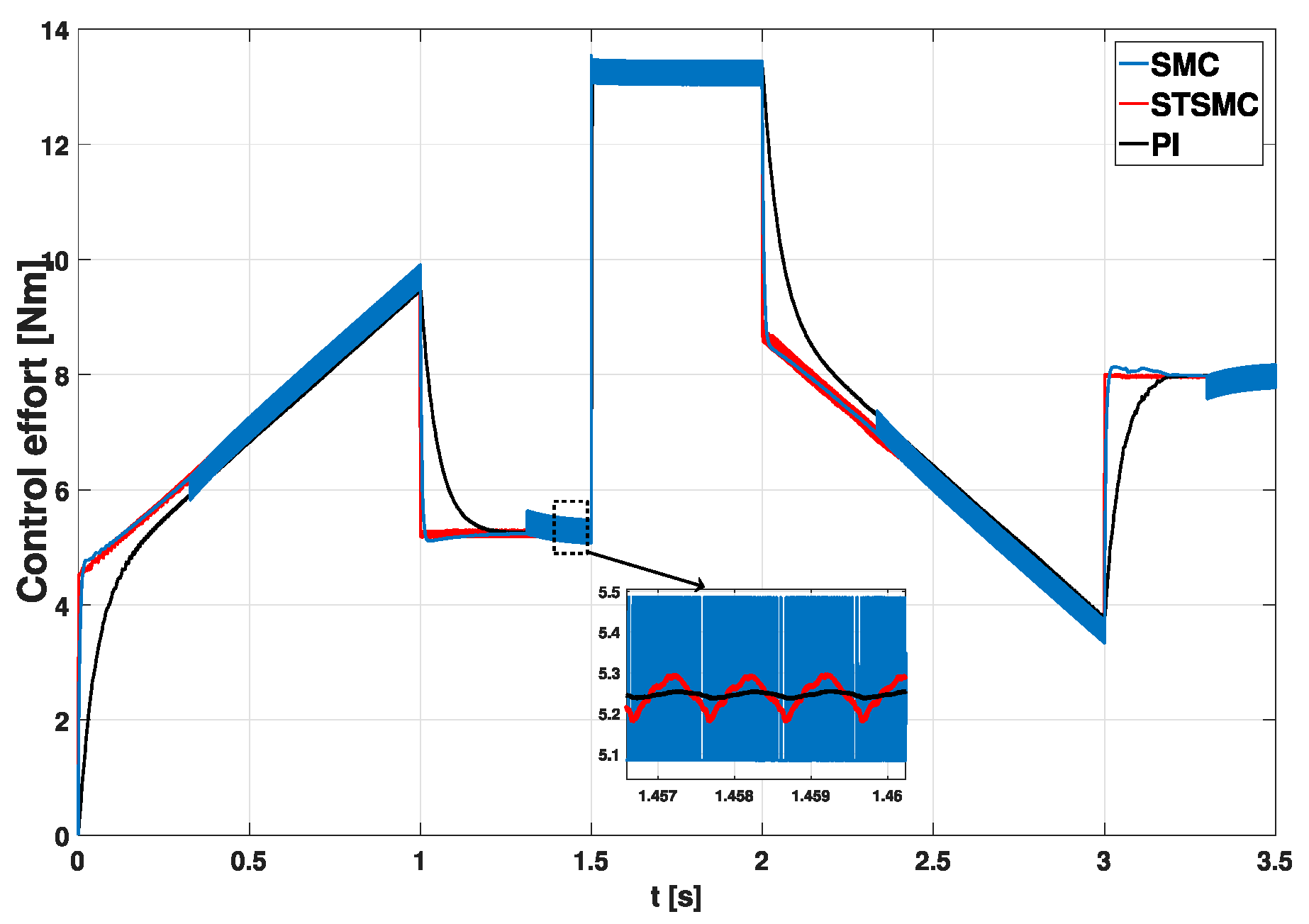
- The simulation and the experimental results show and confirm the benefits of using STSMC in terms of tracking performances and torque ripple minimization, thanks to the significant reduction in the chattering.
- The performances of electric vehicle drivetrain are improved using a Switched Reluctance Machine and STSMC. Both could be a new solution for future electric vehicles drivetrains: SRM as a fault-tolerant design component without rare earth material and STSMC as a robust control to obtain better performances and comfort in the electric vehicle.
- Improvement of performances and robustness of electric vehicle drivetrain using switched reluctance machine can improve performances of other functions of safety in electric vehicle applications and/or in autonomous vehicles where the dynamic behavior of the vehicle on the road depends on the dynamic behavior of the vehicle drivetrain in closed loop.
- This work can be extended to deal with electric and mechanical faults of the electric vehicle drivetrain to show the added value of SRM as a fault tolerant design machine.
- Finally, this study can be extended to Four-Wheel Independent Control Electric Vehicles (FWIC-EV) using Switched Reluctance Machines and STSMC.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
| Parameter | Value |
| Topology | 8 S/6 R |
| Phase number | 4 |
| Power supply (DC) | 250 V |
| Maximum current | 61 A |
| Nominal Power | 8 kW |
| Maximum torque | 20 Nm |
| Maximum speed | 10,000 rpm |
| Phase resistance R | 0.0404 Ohm |
| Moment of inertia J | 0.0043 Kg/m2 |
| Viscous friction coefficient fr | 0.005 Nm/s |
References
- Husain, I. Electric and Hybrid Vehicles: Design Fundamentals; CRC Press: Boca Raton, FL, USA, 2003. [Google Scholar]
- Widmer, J.D.; Martin, R.; Kimiabeigi, M. Electric vehicle traction motors without rare earth magnets. Sustain. Mater. Technol. 2015, 3, 7–13. [Google Scholar] [CrossRef] [Green Version]
- Krishnan, R. Switched Reluctance Motor Drives: Modeling, Simulation, Analysis, Design, and Applications; CRC Press: Boca Raton, FL, USA, 2001. [Google Scholar]
- Biczyski, M.; Sehab, R.; Whidborne, J.; Krebs, G.; Luk, P. Fault-tolerant Switched Reluctance Motor Propulsion System for eVTOLs. In Proceedings of the 12th EASN International Conference on “Innovation in Aviation & Space for opening New Horizons, Barcelona, Spain, 18–21 October 2022. [Google Scholar]
- Colby, R.S.; Mottier, F.M.; Miller, T.J.E. Vibration modes and acoustic noise in a four-phase switched reluctance motor. IEEE Trans. Ind. Appl. 1996, 32, 1357–1364. [Google Scholar] [CrossRef] [Green Version]
- Chiba, A.; Kiyota, K.; Hoshi, N.; Takemoto, M.; Ogasawara, S. Development of a Rare-Earth-Free SR Motor With High Torque Density for Hybrid Vehicles. IEEE Trans. Energy Convers. 2015, 30, 175–182. [Google Scholar] [CrossRef]
- Takiguchi, M.; Sugimoto, H.; Kurihara, N. Acoustic Noise and Vibration Reduction of SRM by Elimination of Third Harmonic Component in Sum of Radial Forces. IEEE Trans. Energy Convers. 2015, 30, 883–891. [Google Scholar] [CrossRef]
- Rana, A.K.; Raviteja, A. A mathematical torque ripple minimization technique based on nonlinear modulating factor for switched reluctance motor drives. IEEE Trans. Ind. Electron. 2022, 69, 1356–1366. [Google Scholar] [CrossRef]
- Ding, W.; Liu, G.; Li, P. A hybrid control strategy of hybridexcitation switched reluctance motor for torque ripple reduction and constant power extension. IEEE Trans. Ind. Electron. 2020, 67, 38–48. [Google Scholar] [CrossRef]
- Sun, X.; Wu, J.; Lei, G.; Guo, Y.; Zhu, J. Torque ripple reduction of srm drive using improved direct torque control with sliding mode controller and observer. IEEE Trans. Ind. Electron. 2021, 68, 9334–9345. [Google Scholar] [CrossRef]
- Kelly, L.; Cossar, C.; Miller, T. Electronic Control of Switched Reluctance Machines; Newnes Power Engineering Series; Newnes: Oxford, UK, 2001. [Google Scholar]
- Saadi, Y.; Sehab, R.; Chaibet, A.; Boukhnifer, M.; Diallo, D. Performance comparison between conventional and robust control for the powertrain of an Electric Vehicle propelled by a Switched Reluctance Machine. In Proceedings of the IEEE Vehicle Power and Propulsion Conference (VPPC), Arlington, TX, USA, 9–12 September 2007; pp. 1–6. [Google Scholar]
- Hannoun, H.; Hilairet, M.; Marchand, C. Gain-scheduling pi current controller for a switched reluctance motor. In Proceedings of the IEEE International Symposium on Industrial Electronics, Vigo, Spain, 4–7 June 2007; pp. 1177–1182. [Google Scholar]
- Ouddah, N.; Boukhnifer, M.; Chaïbet, A.; Monmasson, E. Robust LPV current control of switched reluctance motor. In Proceedings of the 22nd Mediterranean Conference on Control and Automation, Palermo, Italy, 16–19 June 2014. [Google Scholar]
- Ghani, M.; Frah, N.; Tamjis, M. Vector Control of Switched Reluctance Motor Using Fuzzy Logic and Artificial Neutral Network. In Proceedings of the International Conference on Electrical, Electronics, and Optimization Techniques (ICEEOT), Chennai, India, 3–5 March 2016; pp. 4412–4417. [Google Scholar]
- Ling, F.; Ma, M.; Yang, Q.; Li, F. Torque Ripple Reduction of Switched Reluctance Motor by Segmented Harmonic Currents Injection Based on Adaptive Fuzzy Logic Control. In Proceedings of the 14th IEEE Conference on Industrial Electronics and Applications (ICIEA), Xi’an, China, 19–21 June 2019. [Google Scholar]
- John, G.; Eastham, A. Speed control of switched reluctance motor using sliding mode control strategy. In Proceedings of the IAS ’95. Conference Record of the 1995 IEEE Industry Applications Conference Thirtieth IAS Annual Meeting, Orlando, FL, USA, 8–12 October 1995; Volume 1, pp. 263–270. [Google Scholar]
- Ruiwei, Z.; Xisen, Q.; Liping, J.; Yingch, Z.; Jintong, N. An adaptive sliding mode current control for switched reluctance motor. In Proceedings of the IEEE Conference and Expo Transportation Electrification Asia-Pacific (ITEC Asia-Pacific), Beijing, China, 31 August–3 September 2014. [Google Scholar]
- Canale, M.; Fagiano, L.; Ferrara, A.; Vecchio, C. Comparing Internal Model Control and Sliding-Mode Approaches for Vehicle Yaw Control. IEEE Trans. Intell. Transp. Syst. 2009, 10, 31–41. [Google Scholar] [CrossRef]
- Ouddah, N.; Boukhnifer, M.; Chaibet, A.; Monmasson, E. Robust controller designs of switched reluctance motor for electrical vehicle. In Proceedings of the 22nd Mediterranean Conference on Control and Automation, Palermo, Italy, 16–19 June 2014. [Google Scholar]
- Peng, F.; Emadi, A. A digital PWM current controller for switched reluctance motor drives. In Proceedings of the IEEE Transportation Electrification Conference and Expo (ITEC), Dearborn, MI, USA, 15–18 June 2014; pp. 1–6. [Google Scholar]
- Li, X.; Shamsi, P. Model Predictive Current Control of Switched Reluctance Motors with Inductance Auto-Calibration. IEEE Trans. Ind. Electron. 2016, 63, 3934–3941. [Google Scholar] [CrossRef]
- Liu, W.; Xiong, L.; Xia, X.; Lu, Y.; Gao, L.; Song, S. Vision-aided intelligent vehicle sideslip angle estimation based on a dynamic model. IET Intell. Transp. Syst. 2020, 14, 1183–1189. [Google Scholar] [CrossRef]
- Liu, W.; Xiong, L.; Xia, X.; Yu, Z. Intelligent vehicle sideslip angle estimation considering measurement signals delay. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018; pp. 1584–1589. [Google Scholar]
- Husain, I.; Hossain, S. Modeling, Simulation, and Control of Switched Reluctance Motor Drives. IEEE Trans. Ind. Electron. 2005, 52, 1625–1634. [Google Scholar] [CrossRef]
- Pollock, C.; Williams, B. A unipolar converter for a Switched Reluctance Motor. IEEE Trans. Ind. Appl. 1990, 26, 222–228. [Google Scholar] [CrossRef]
- Bartolini, G.; Ferrara, A.; Usai, E. Chattering avoidance by second order sliding mode control. IEEE Trans. Autom. Control 1998, 43, 241–246. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Performances | PI | SMC | STSMC |
|---|---|---|---|
| Rise time | 0.105 s | 0.08 s | 0.01 s |
| Max of steady state error | 6% | 0.3% | 0.1% |
| Max of overshoot | 27‰ | 23‰ | 8‰ |
| Torque ripple at maximum velocity | 14.5% | 13.9% | 12% |
| Physical Parameter Variation | PI | SMC | STSMC |
|---|---|---|---|
| Resistance R | Velocity emax = 2 rpm | Velocity emax = 0.8 rpm | Velocity emax = 0.5 rpm |
| Current emax = 1.3 A | Current emax = 0.97 A | Current emax = 0.3 A | |
| Moment of inertia J | Velocity emax = 5 rpm | Velocity emax = 5 rpm | Velocity emax = 1.5 rpm |
| Velocity emax = 3 rpm | Velocity emax = 40 rpm | Velocity emax = 0.5 rpm | |
| Velocity emax = 48 rpm | Velocity emax = 8 rpm | Velocity emax = 5 rpm | |
| Torque emax in % = 0.6 | Torque emax in % = 0.1 | Torque emax in % = 0.06 |
| Controller | ||||
|---|---|---|---|---|
| PI | SMC | STSMC | ||
| Performances | Tracking | - | ++ | ++ |
| Rapidity | + | ++ | ++ | |
| Precision | + | ++ | ++ | |
| Torque ripple | + | - | ++ | |
| Robustness | R | + | + | ++ |
| fr | + | + | ++ | |
| J | + | ++ | ++ | |
| TL | + | ++ | ++ | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sehab, R.; Akrad, A.; Saadi, Y. Super-Twisting Sliding Mode Control to Improve Performances and Robustness of a Switched Reluctance Machine for an Electric Vehicle Drivetrain Application. Energies 2023, 16, 3212. https://doi.org/10.3390/en16073212
Sehab R, Akrad A, Saadi Y. Super-Twisting Sliding Mode Control to Improve Performances and Robustness of a Switched Reluctance Machine for an Electric Vehicle Drivetrain Application. Energies. 2023; 16(7):3212. https://doi.org/10.3390/en16073212
Chicago/Turabian StyleSehab, Rabia, Ahmad Akrad, and Yakoub Saadi. 2023. "Super-Twisting Sliding Mode Control to Improve Performances and Robustness of a Switched Reluctance Machine for an Electric Vehicle Drivetrain Application" Energies 16, no. 7: 3212. https://doi.org/10.3390/en16073212
APA StyleSehab, R., Akrad, A., & Saadi, Y. (2023). Super-Twisting Sliding Mode Control to Improve Performances and Robustness of a Switched Reluctance Machine for an Electric Vehicle Drivetrain Application. Energies, 16(7), 3212. https://doi.org/10.3390/en16073212