
Simple and Robust MPPT Current Control of a Wound Rotor Synchronous Wind Generator



Abstract
:1. Introduction
2. Description of Wind Turbine System
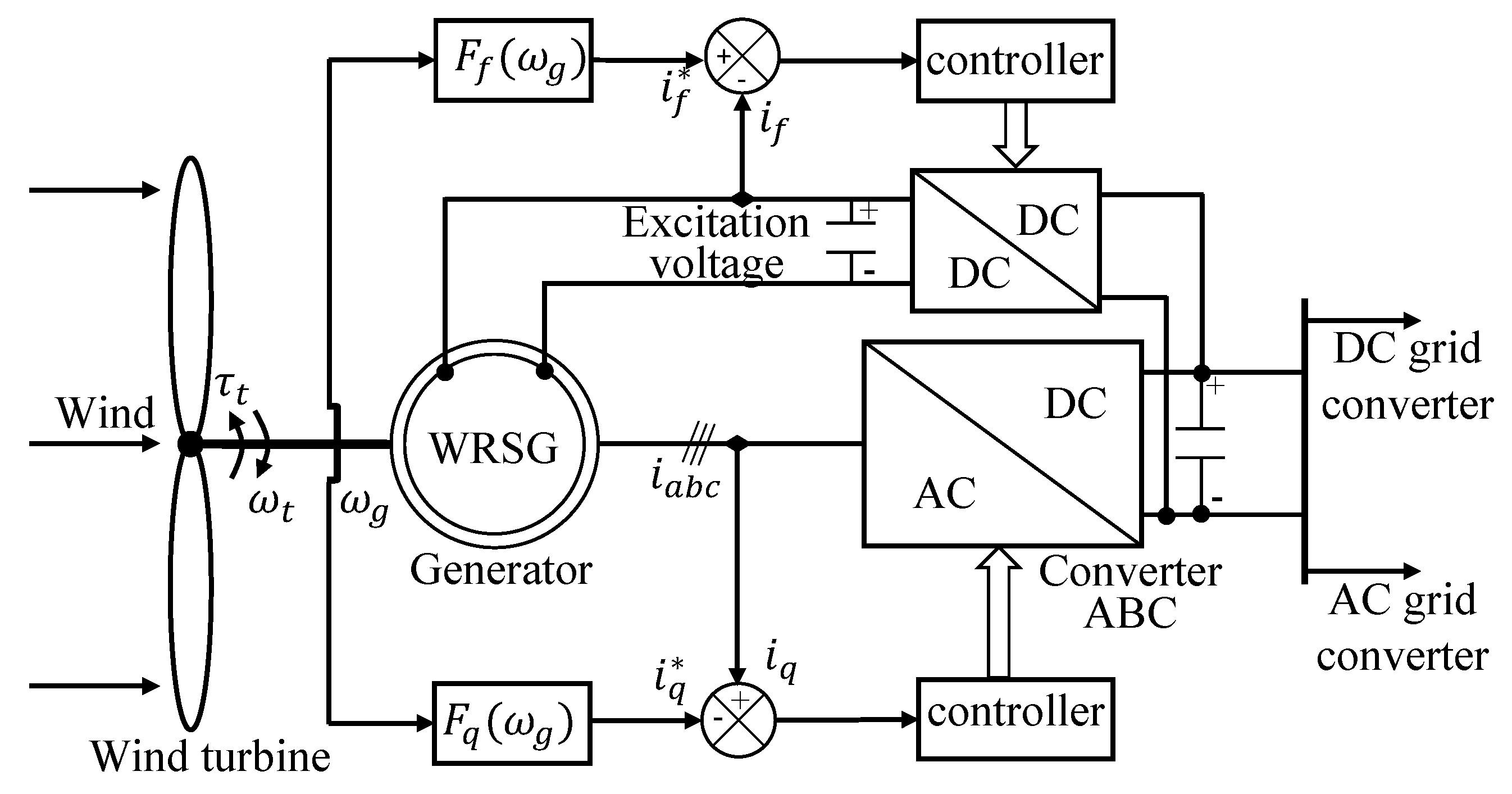
2.1. Composition of Wind Turbine System
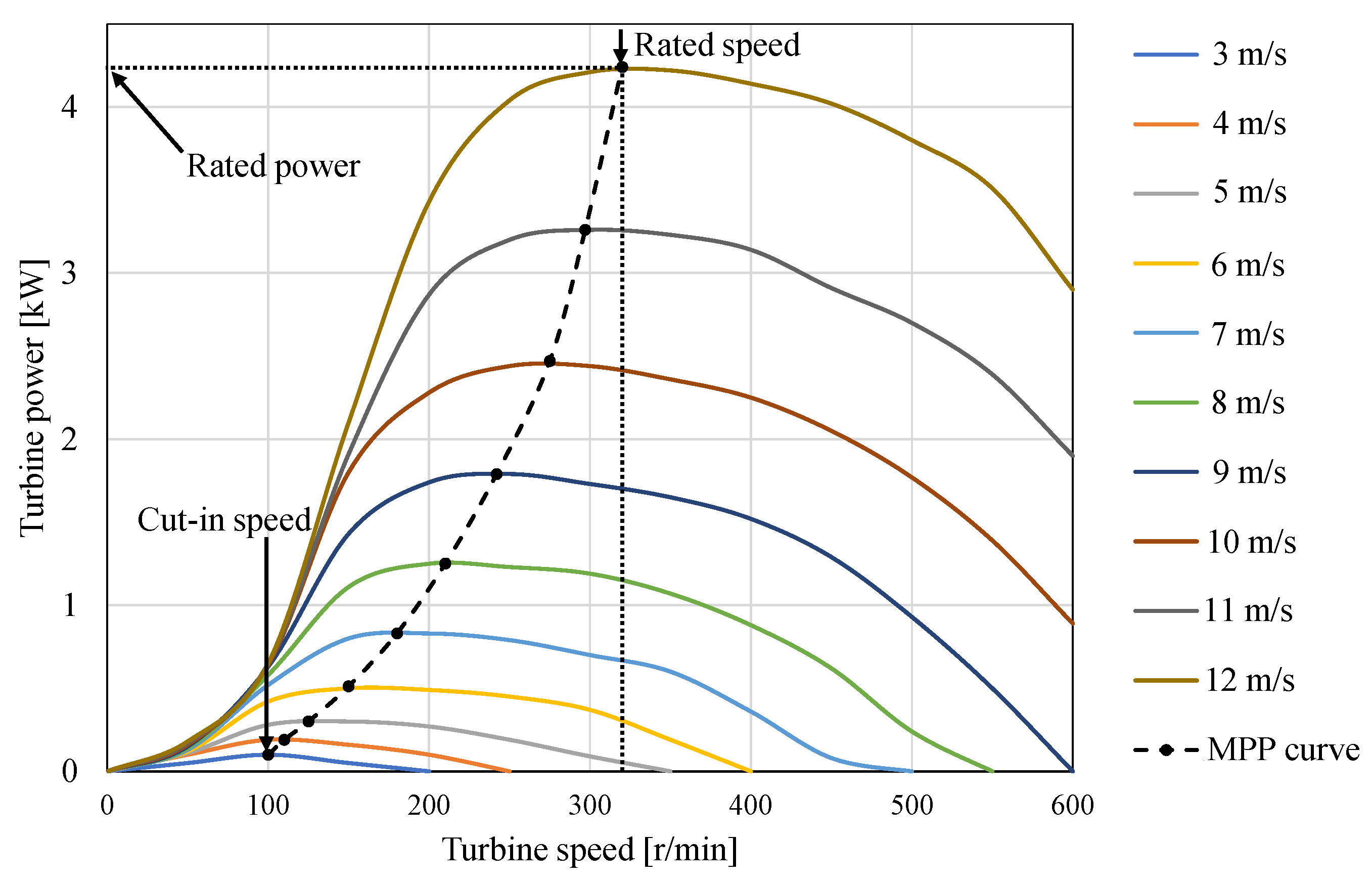
2.2. Characteristics of the Wind Turbine
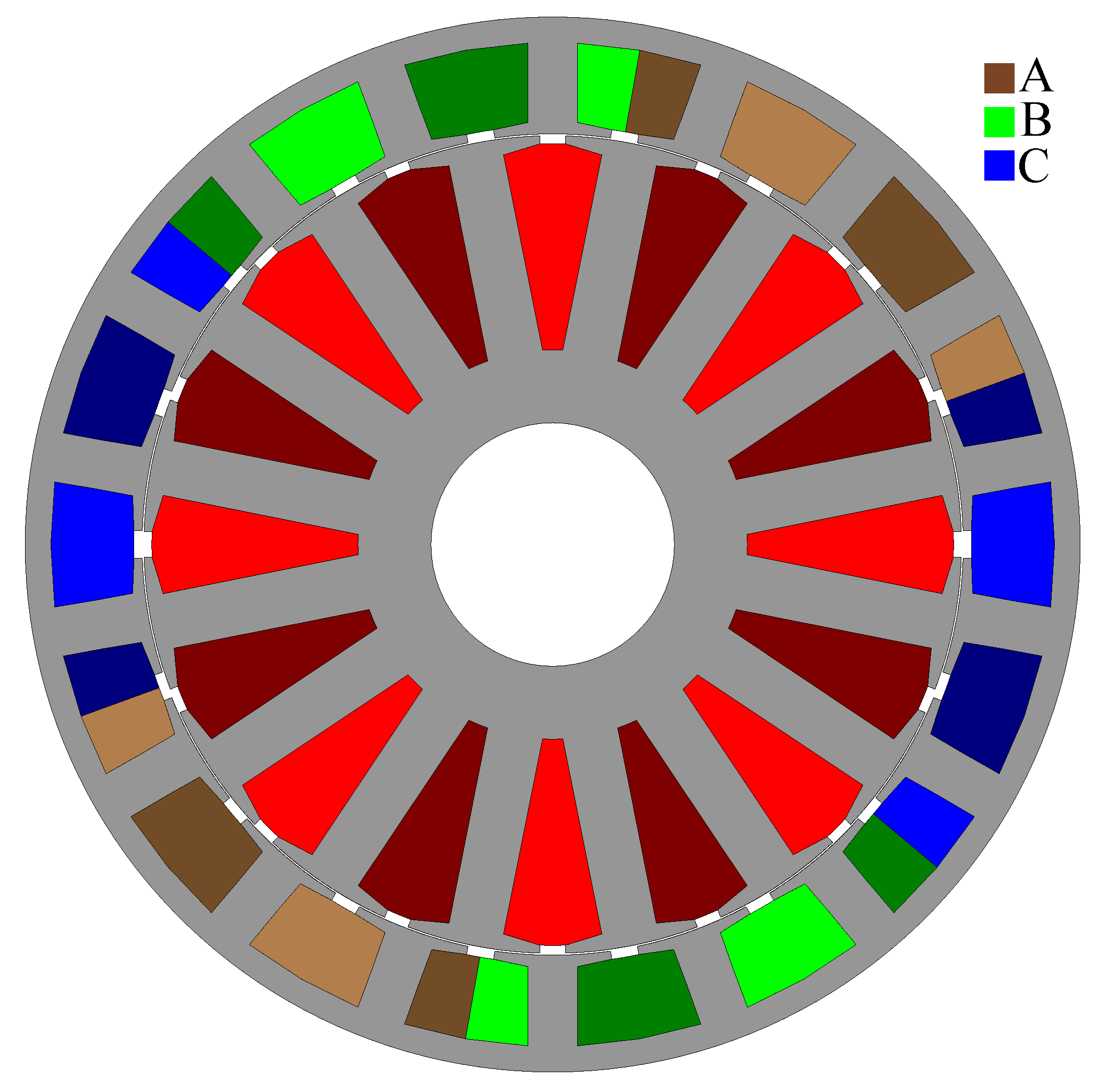
3. Design of the WRSG
3.1. WRSG Specifications
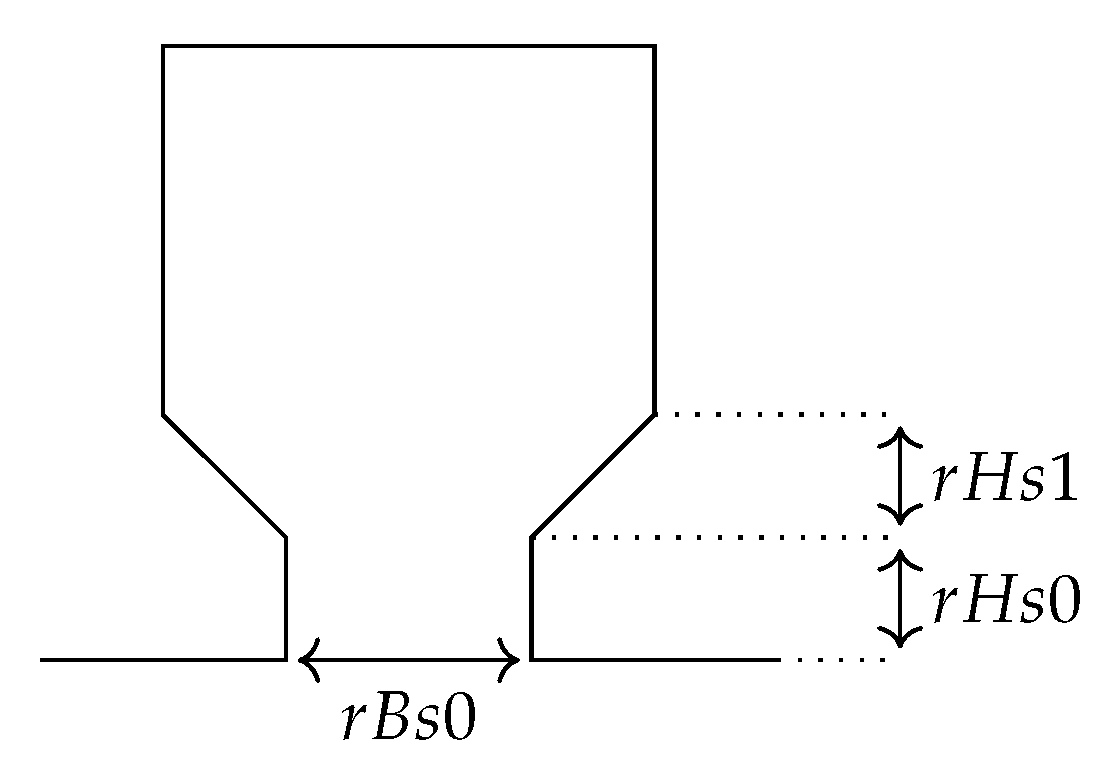
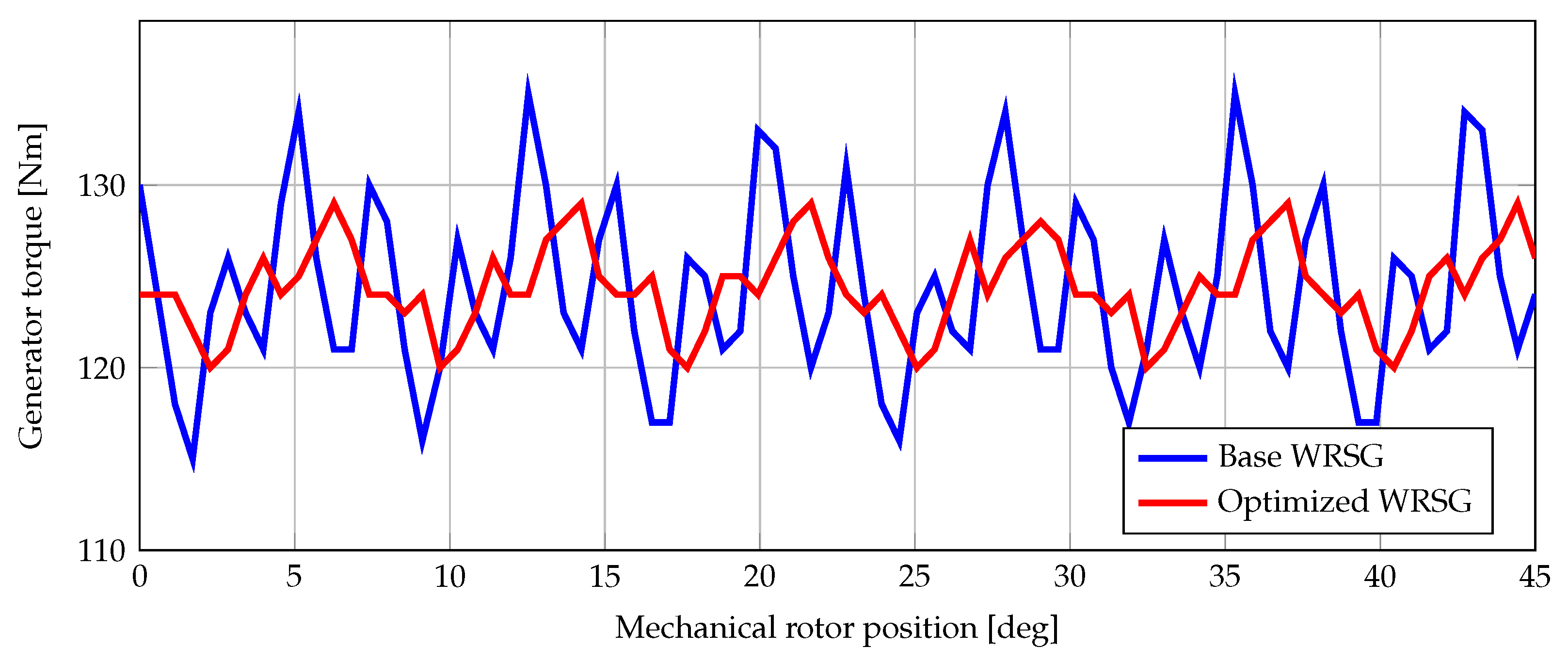
3.2. Minimizing the Torque Ripple for WRSG
4. WRSG Modeling and Parameters
4.1. Dynamic Model of WRSG
4.2. Generator Parameters Using Frozen Permeabilities
- A static non-linear FEA solution of the WRSG was simulated at the rated speed and current vector . From this solution, the non-linear permeabilities of the WRSG were calculated.
- The FEA permeabilities of all the WRSG mesh elements from the first step above were saved and frozen.
5. Wind Turbine System Control
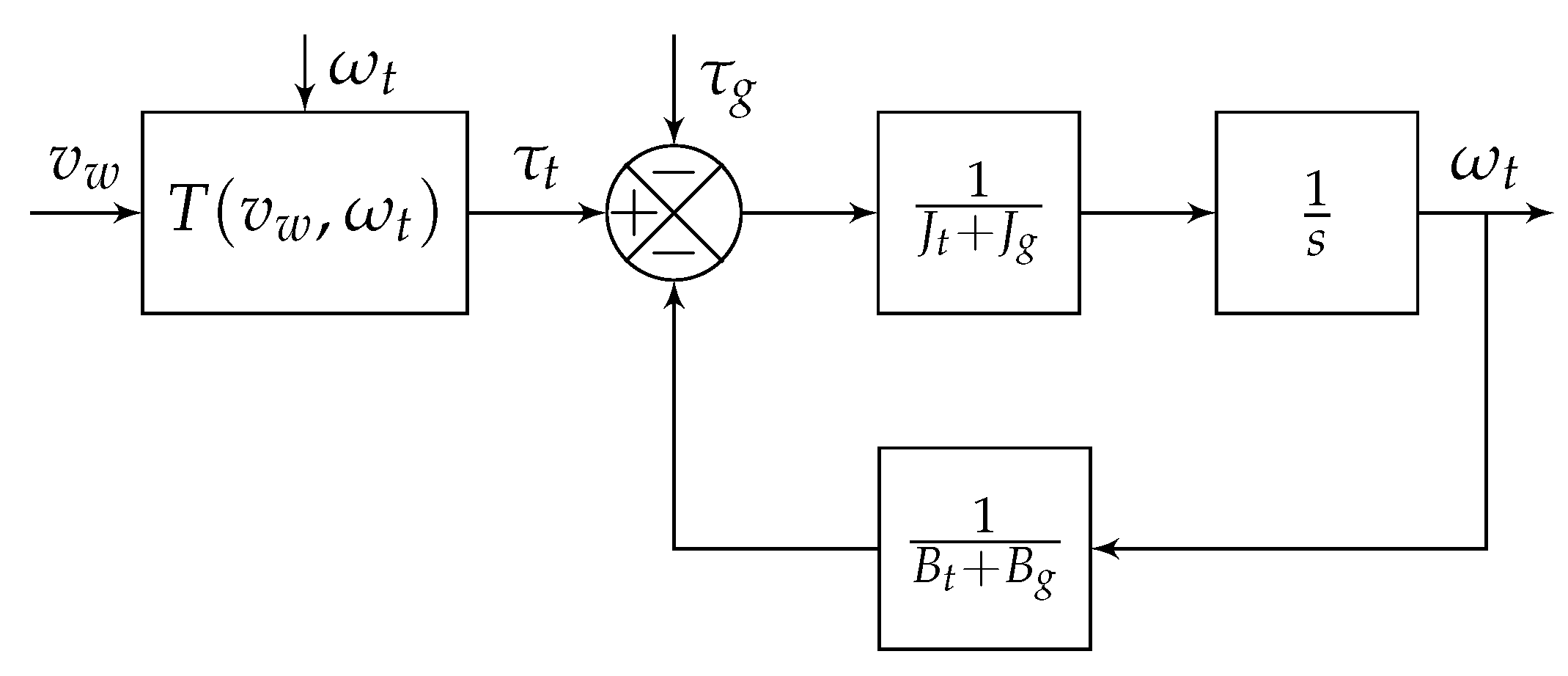
5.1. Turbine Control
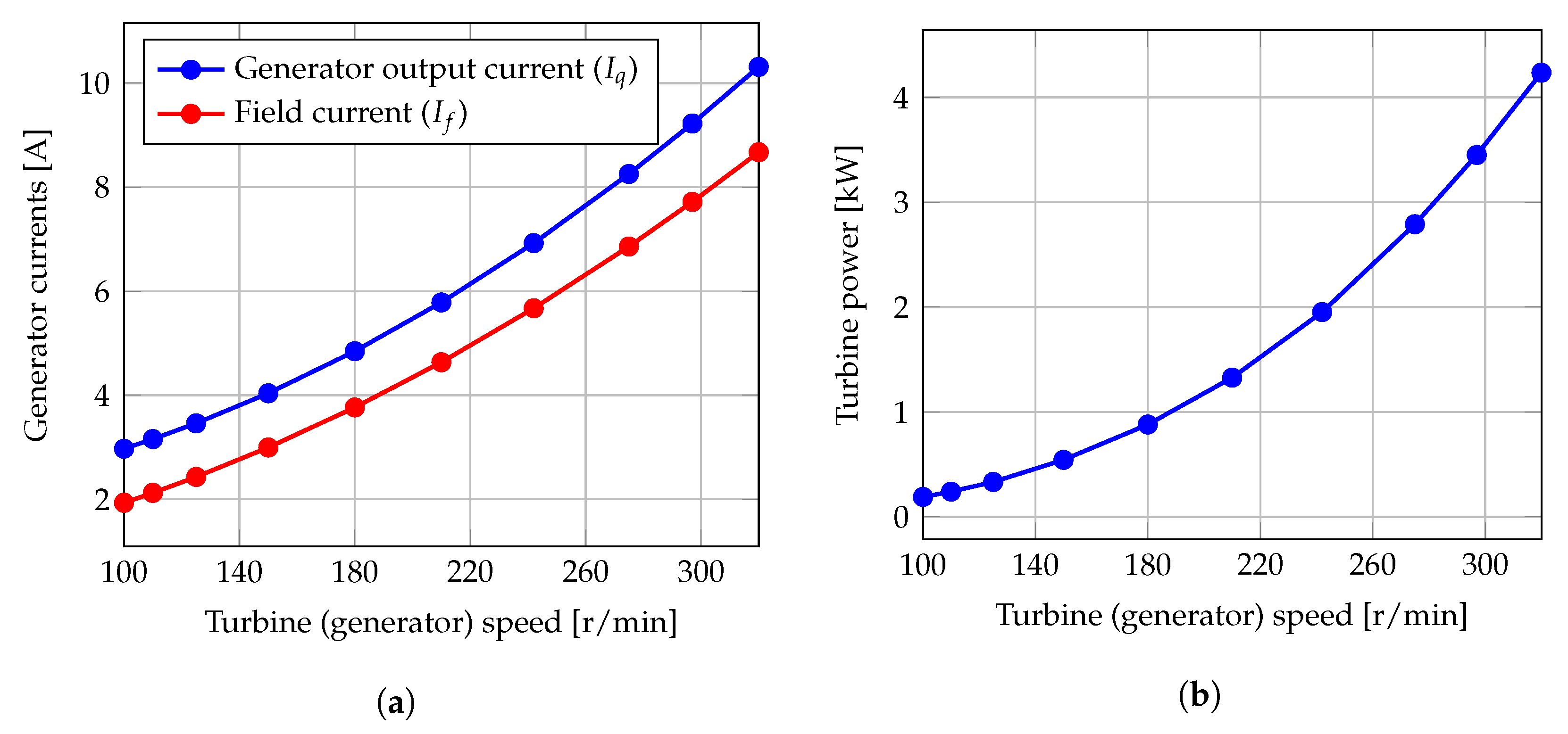
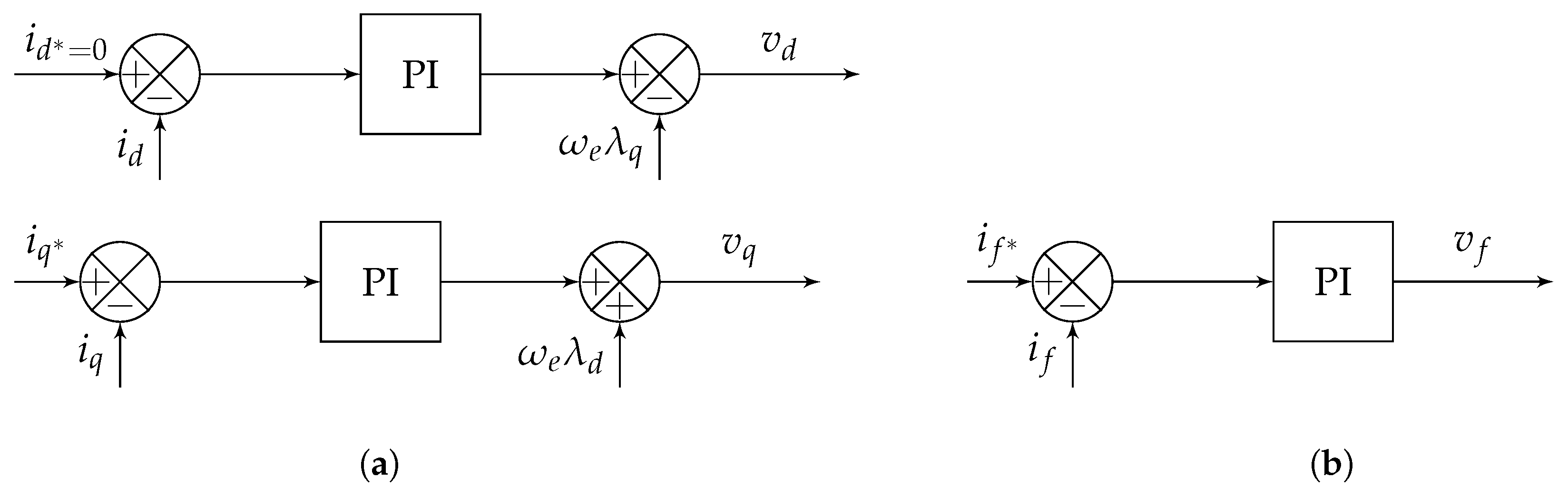
5.2. Generator MPPT Current Control
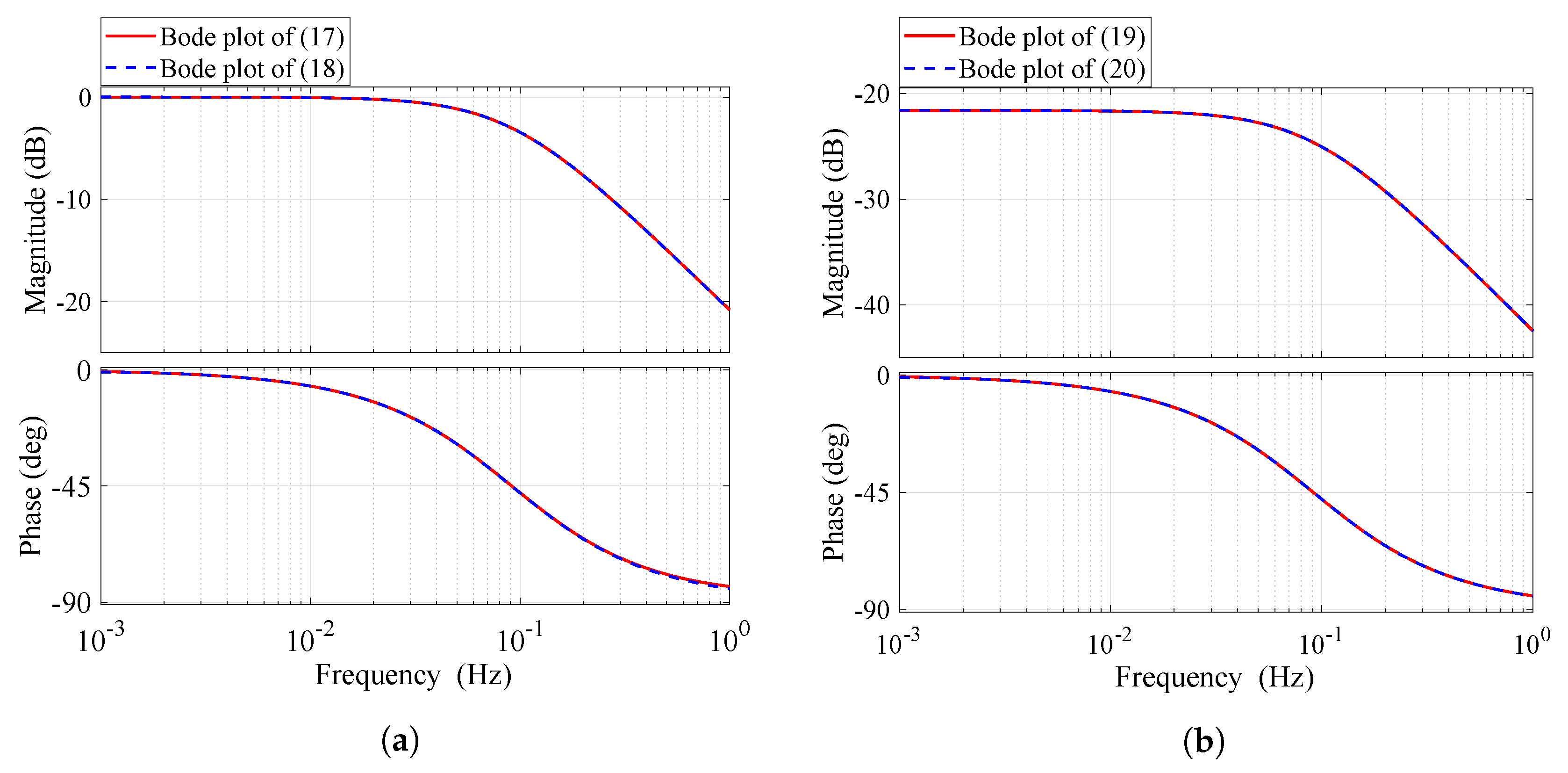
5.3. Transfer Function Derivation
6. Simulation Results
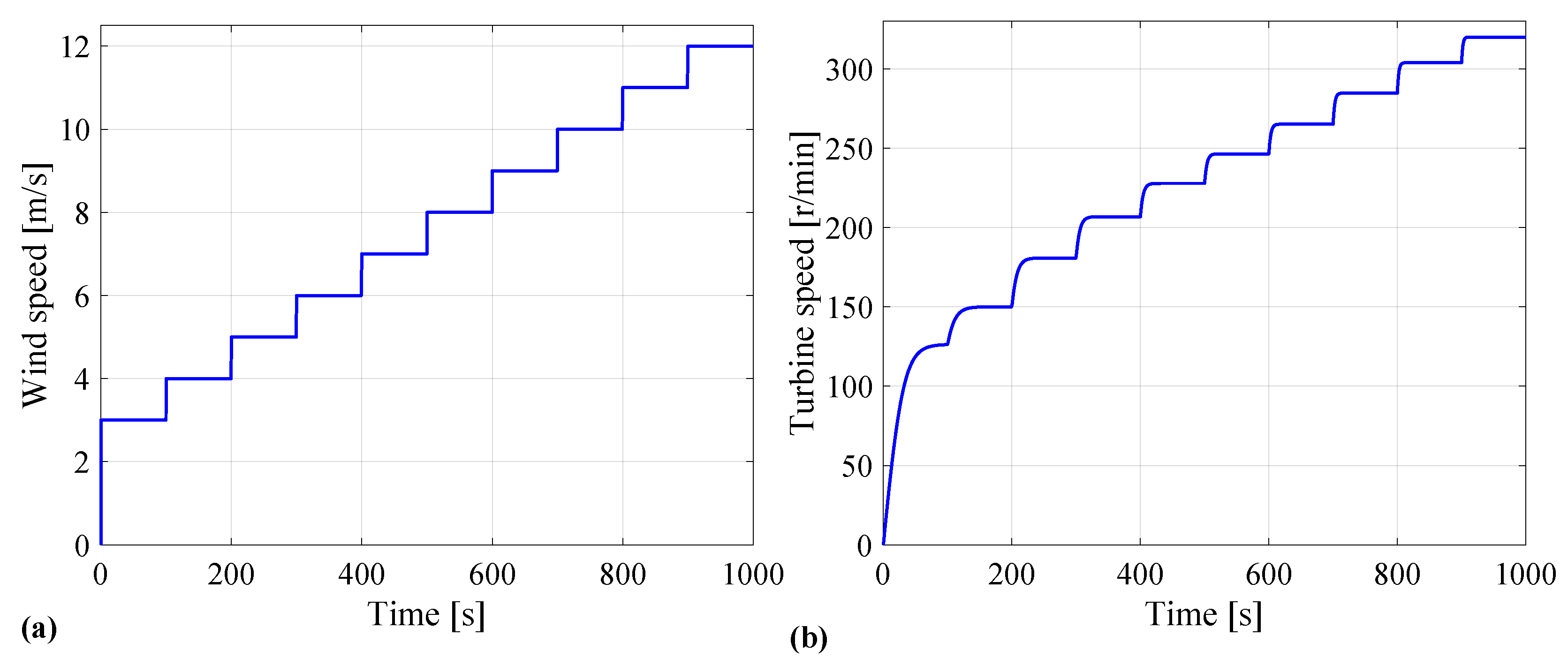
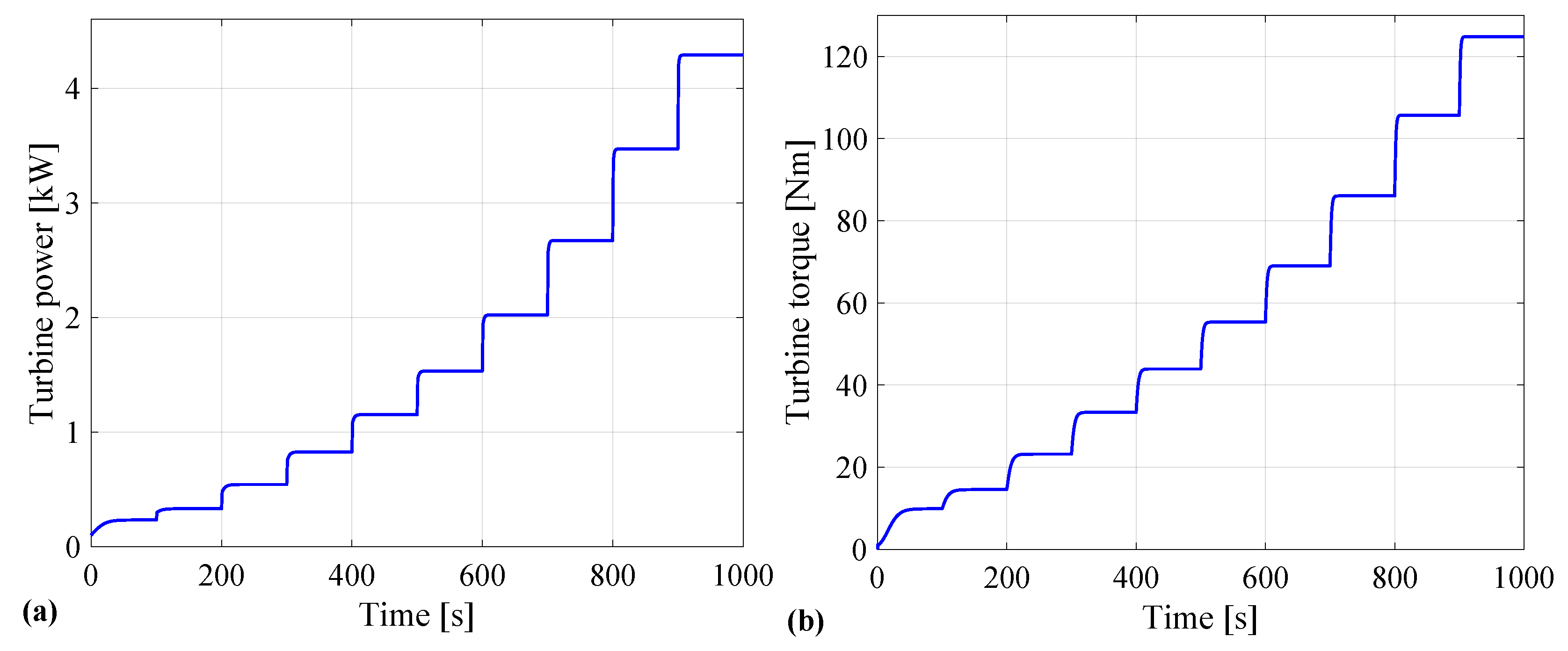
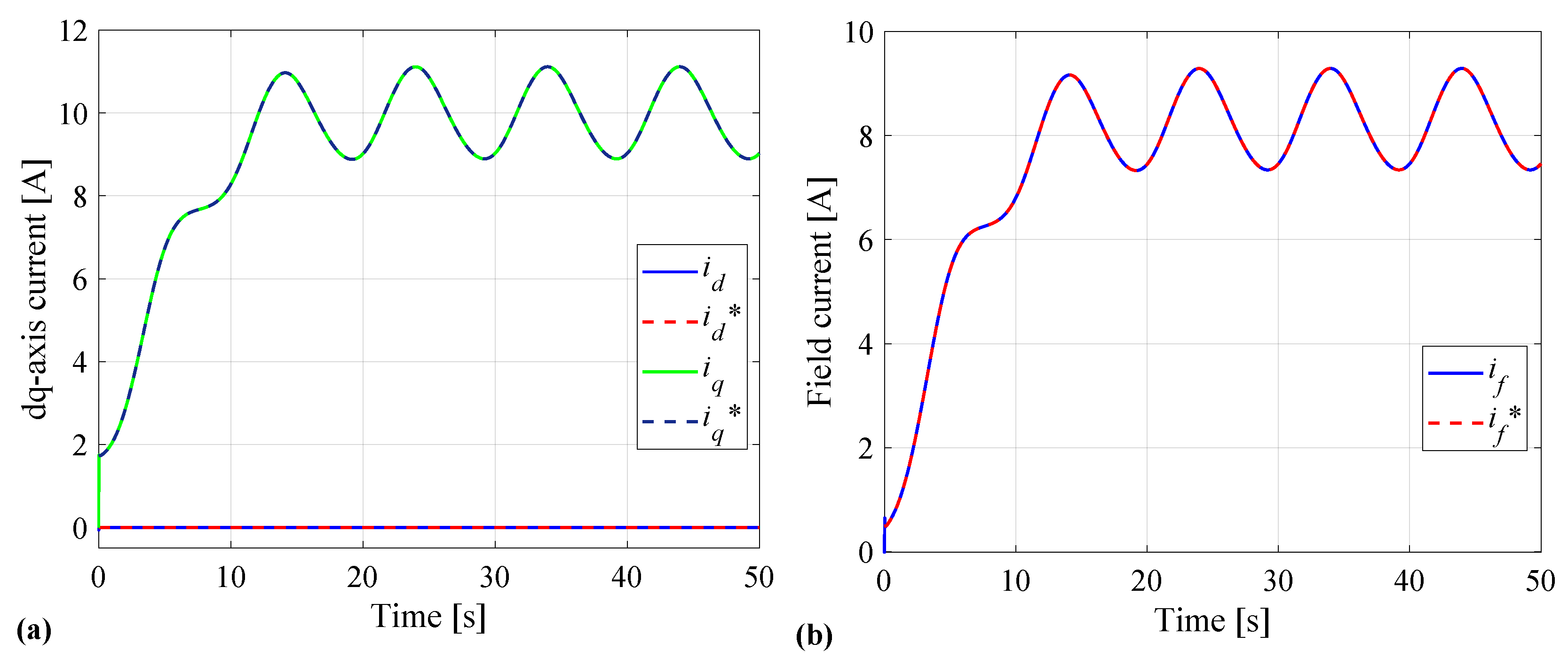
6.1. Step Change in the Wind Speed
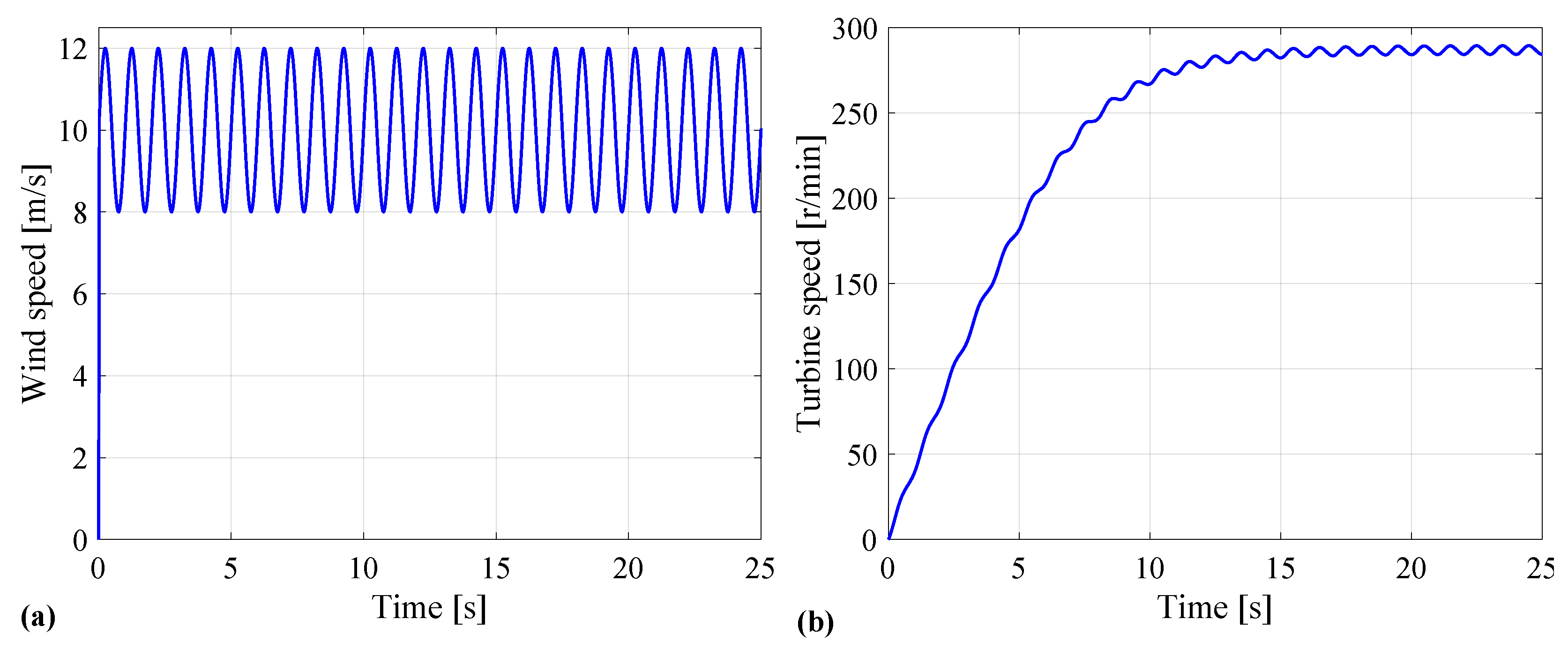
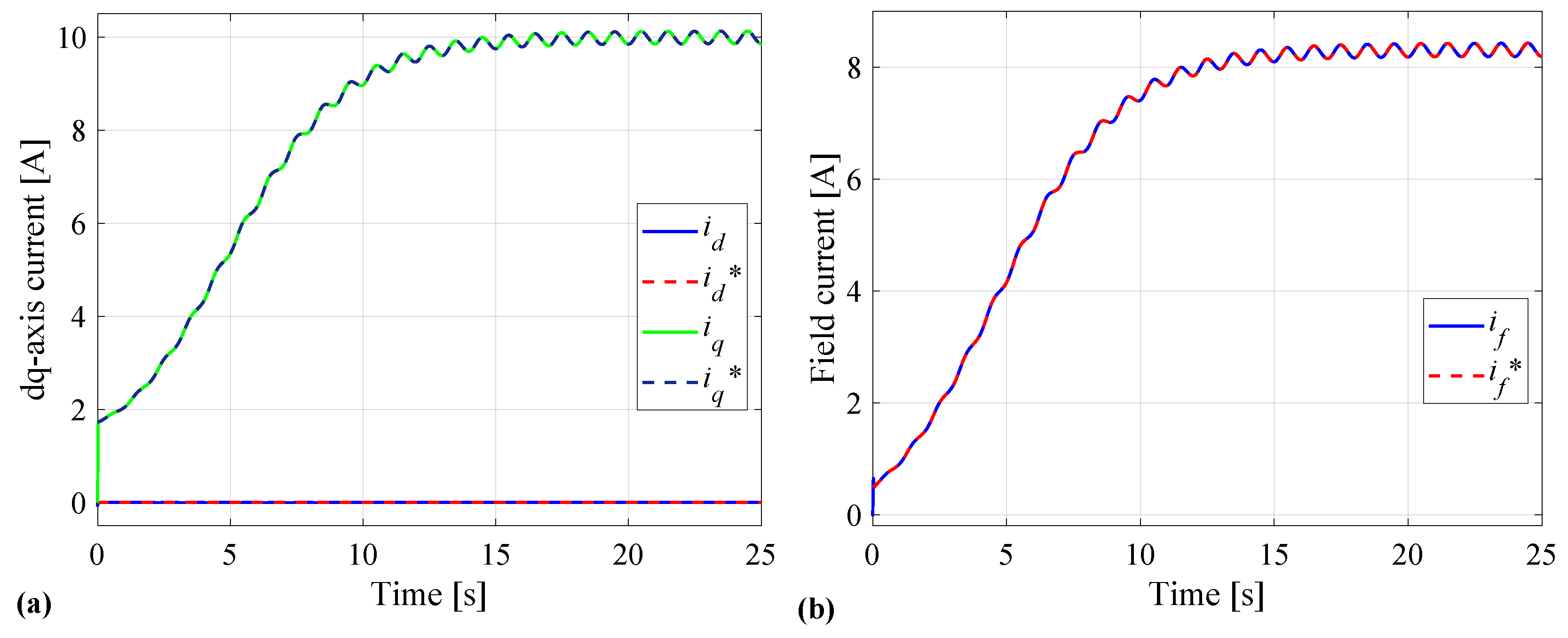
6.2. Wind Speed with a Frequency of 0.1 Hz
6.2.1. Wind Speed with a Frequency of 1 Hz
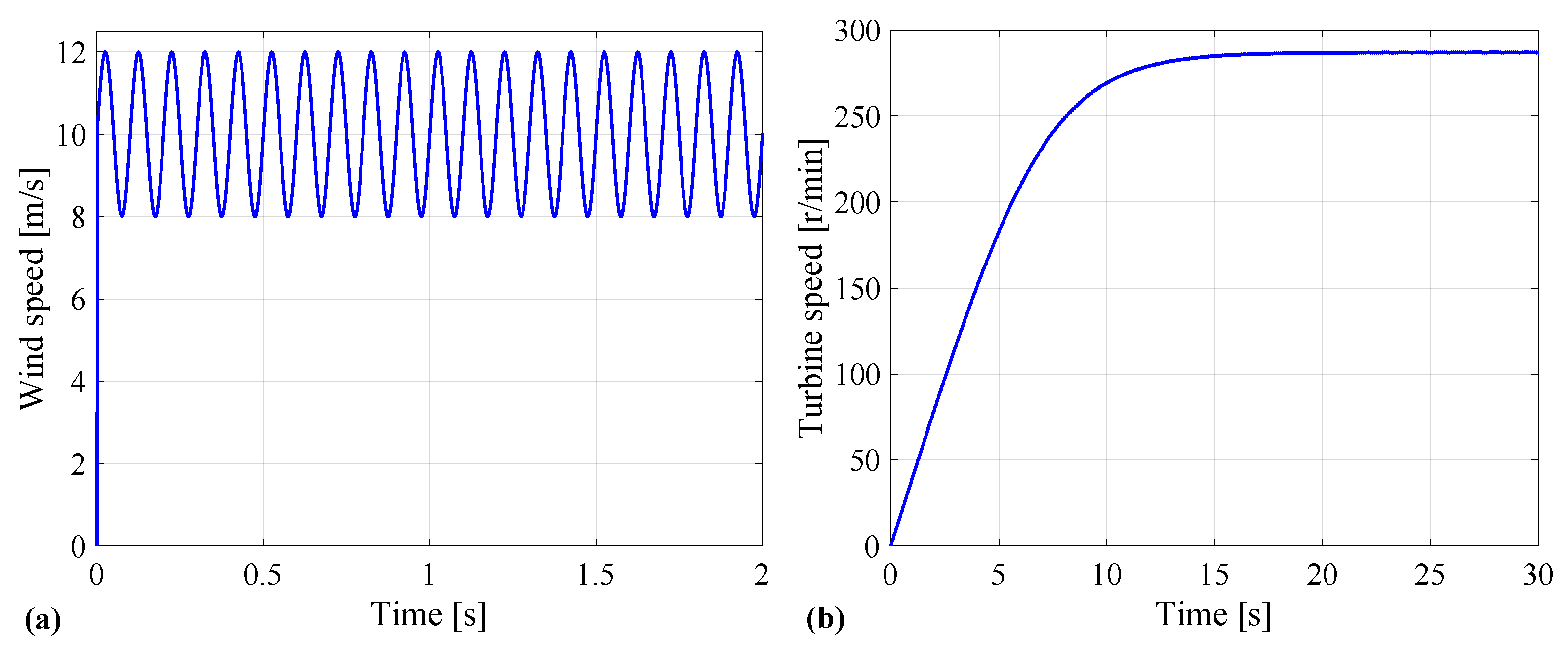
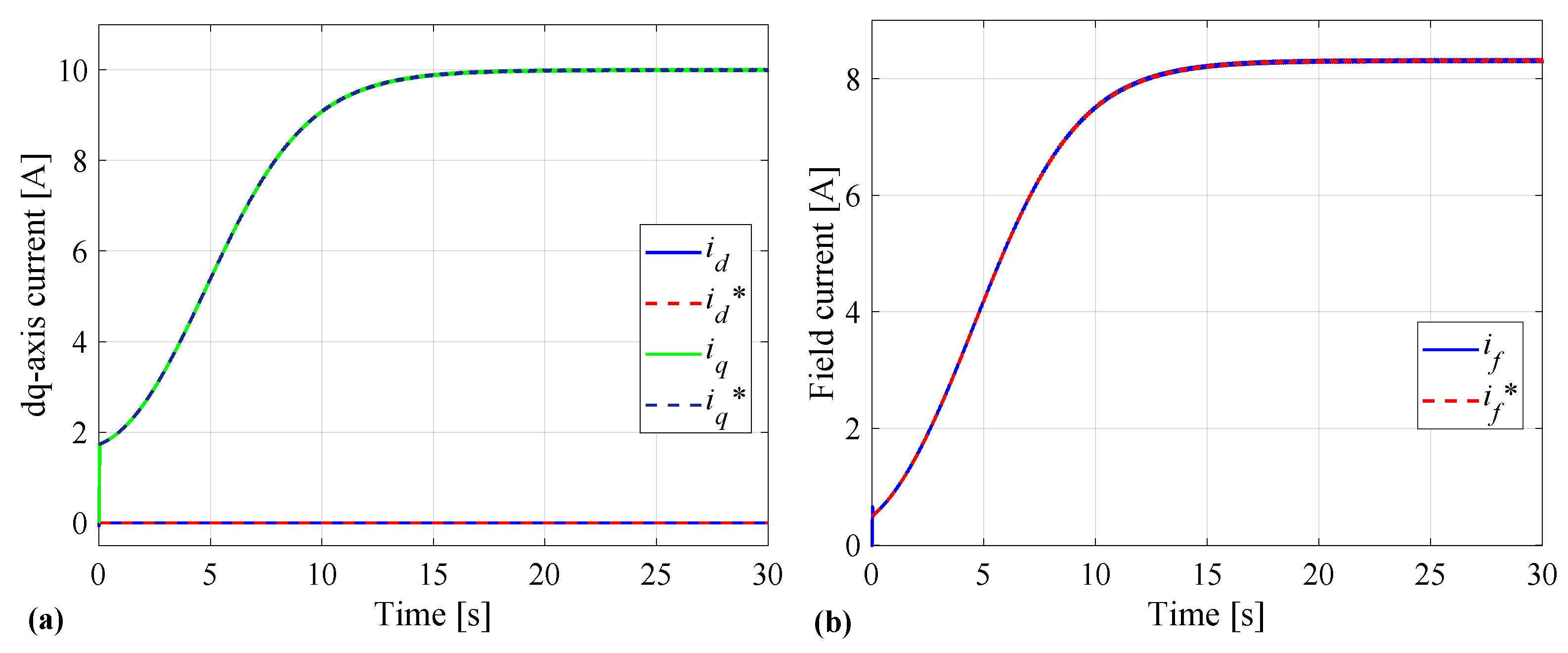
6.2.2. Wind Speed with a Frequency of 10 Hz
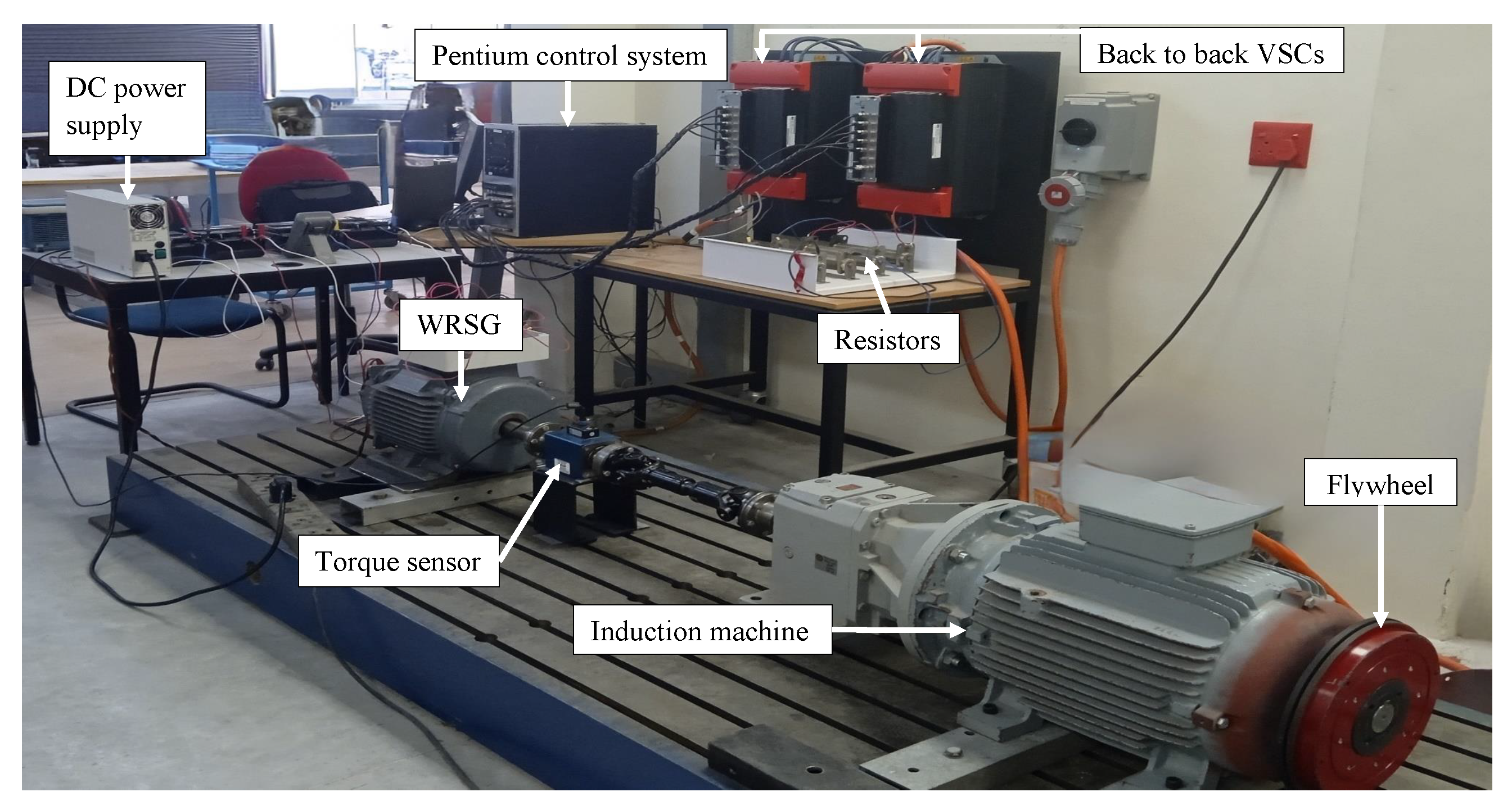
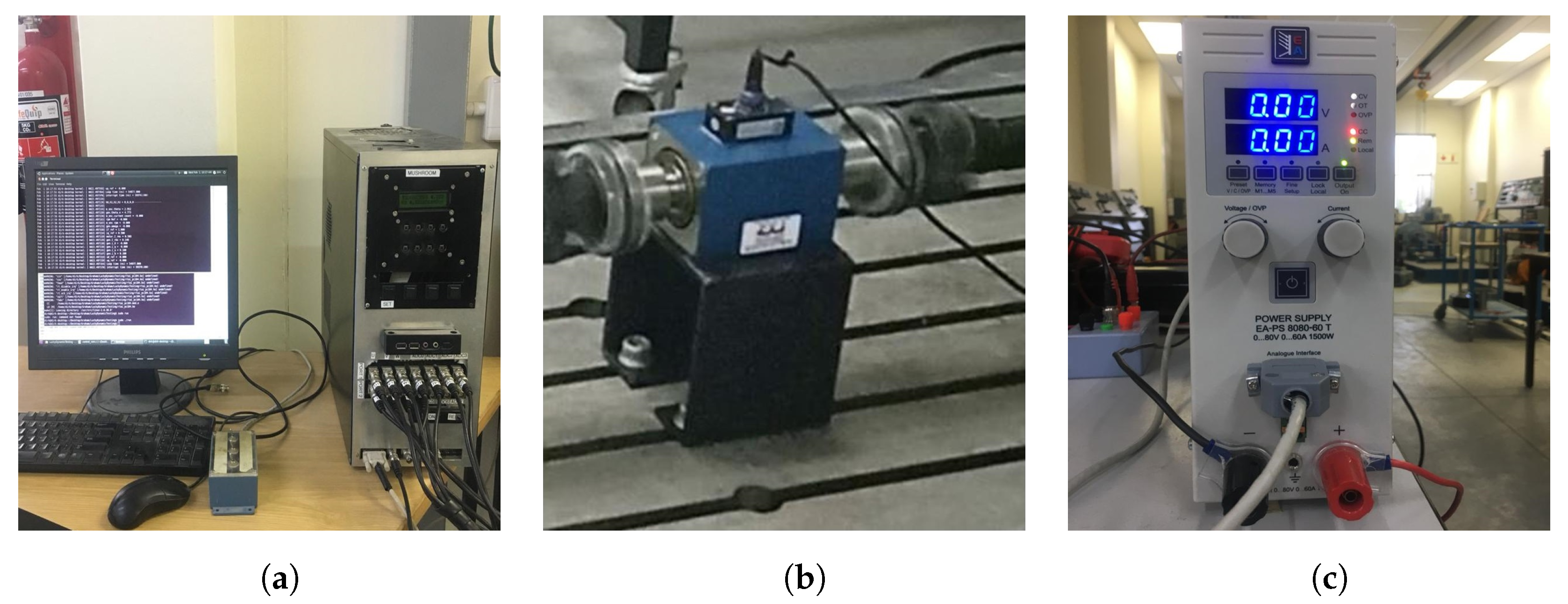
7. Experimental Results
7.1. Experiment Setup
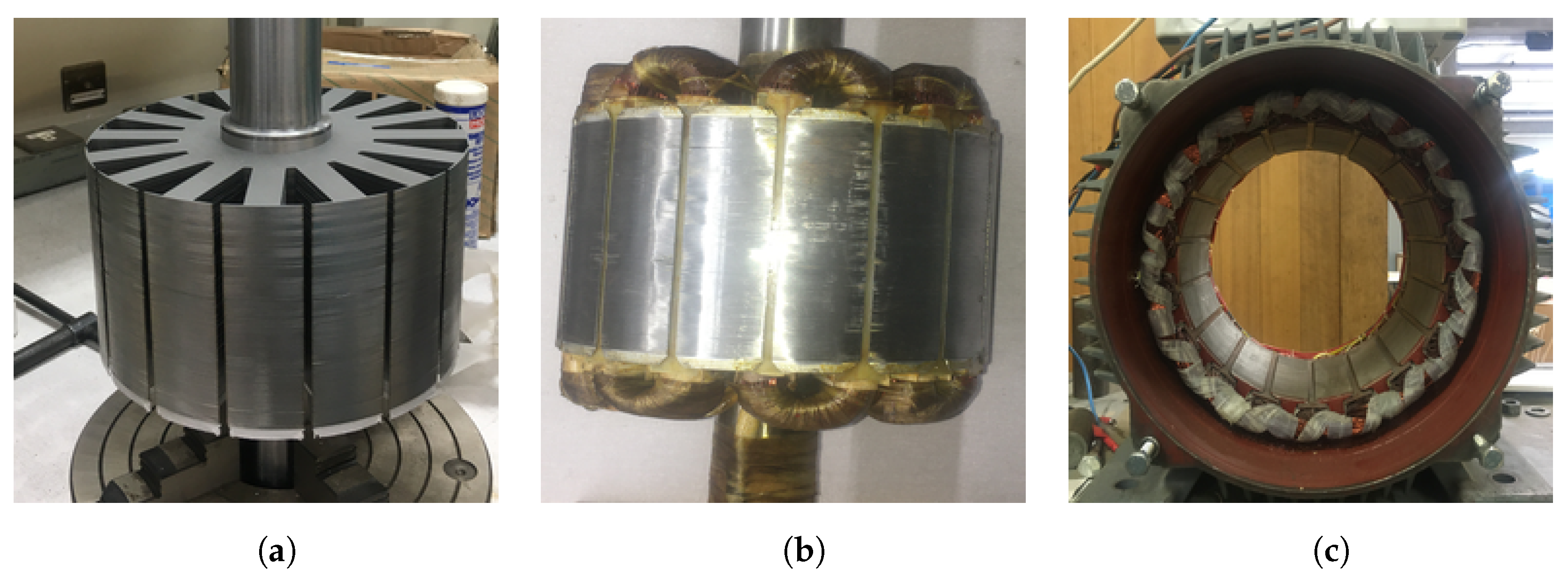
7.2. WRSG Prototype
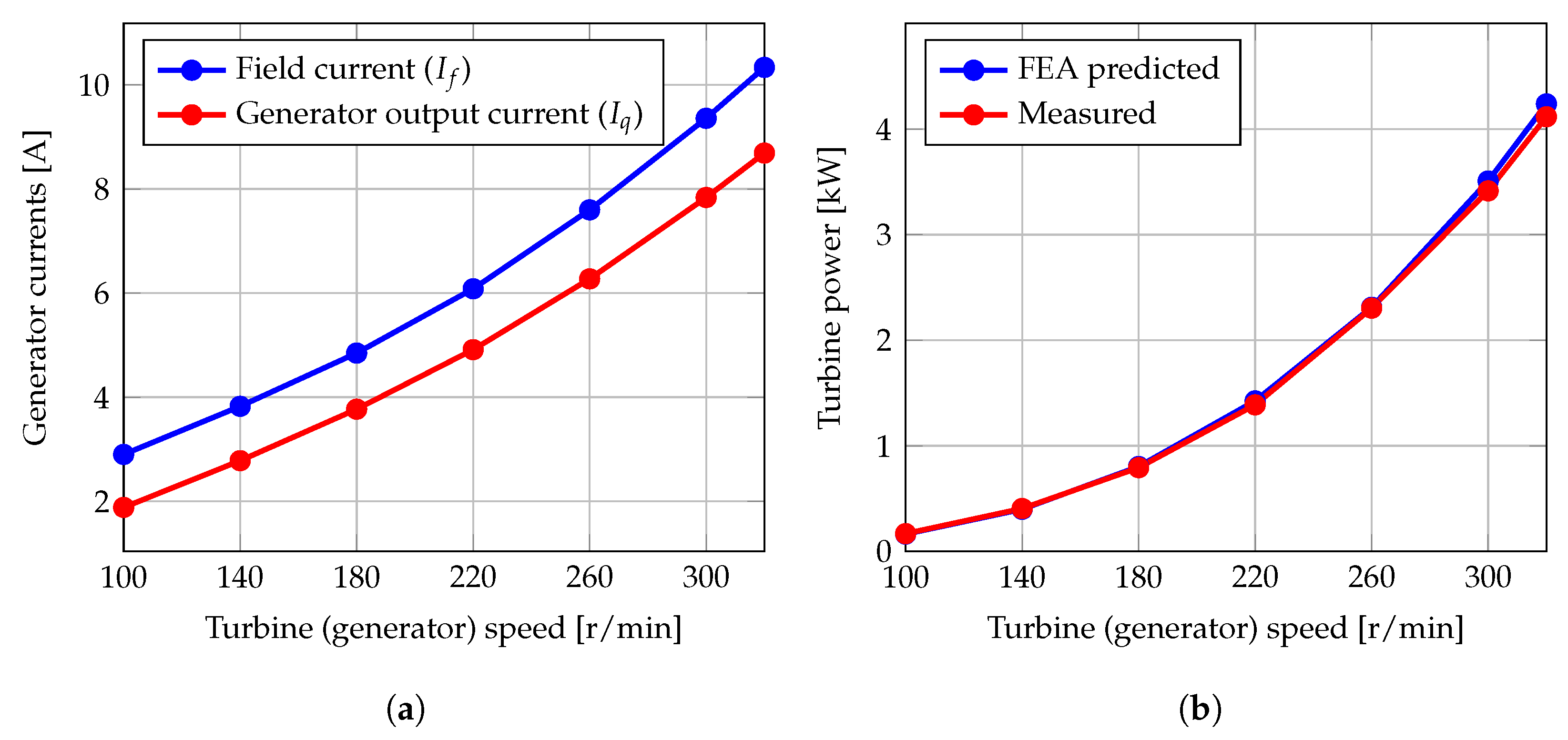
7.3. Steady-State Performance
7.4. Dynamic Performance
7.5. Speed Profile with Different Frequencies
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| CPU | Central Processing Unit |
| DC | Direct Current |
| DFIG | Doubly-Fed Induction Generator |
| DPC | Direct Power Control |
| EESG | Electrically Excited Synchronous Generator |
| FEA | Finite Element Analysis |
| FEM | Finite Element Method |
| FP | Frozen Permeability |
| FPGA | Field Programmable Gate Array |
| HCS | Hill Climb Search |
| IM | Induction Machine |
| INC | Incremental Conductance |
| IPC | Indirect Power Control |
| MPP | Maximum Power Point |
| MPPT | Maximum Power Point Tracking |
| OT | Optimal Torque |
| P&O | Perturb and Observe |
| PID | Proportional Integral Derivative |
| PI | Proportional Integral |
| PM | Permanent Magnet |
| PMSG | Permanent Magnet Synchronous Generator |
| PSF | Power Signal Feedback |
| RE | Rare Earth |
| RSG | Reluctance Synchronous Generator |
| SCIG | Squirrel Cage Induction Generator |
| SMC | Sliding Mode Control |
| TSR | Tip-Speed Ratio |
| VSC | Voltage Source Converter |
| WRSG | Wound Rotor Synchronous Generator |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Wind Turbine | Value |
|---|---|
| Turbine inertia () | 21 |
| Turbine friction () | 0.007 |
| Wound rotor synchronous generator | |
| Stator resistance () | 1.10 |
| Rotor resistance () | 2.63 |
| d-axis inductance () | 51.6 mH |
| q-axis inductance () | 57.3 mH |
| Stator-to-rotor mutual inductance () | 88.4 mH |
| Field-winding self-inductance () | 178 mH |
| Generator inertia () | 0.002831 |
| Generator friction () | 0.0001 |
| Pole pairs (p) | 8 |
| Rated power | 4.20 kW |
| Rated torque | 126.4 Nm |
| Rated speed | 320 r/min |
| Cut-in speed | 100 r/min |
References
- Ritchie, H.; Roser, M.; Rosado, P. Energy. Our World in Data. 2022. Available online: https://ourworldindata.org/energy (accessed on 18 January 2023).
- Desalegn, B.; Gebeyehu, D.; Tamirat, B. Wind energy conversion technologies and engineering approaches to enhancing wind power generation: A review. Heliyon 2022, 8, e11263. [Google Scholar] [CrossRef] [PubMed]
- Dajaku, G.; Spas, S.; Gerling, D. Advanced optimization methods for fractional slot concentrated windings. Electr. Eng. 2019, 101, 103–120. [Google Scholar] [CrossRef]
- Zou, Y. Induction generator in wind power systems. In Induction Motors-Applications, Control and Fault Diagnostics; IntechOpen: London, UK, 2015. [Google Scholar]
- Roshanfekr, P.; Lundmark, S.; Thiringer, T.; Alatalo, M. A synchronous reluctance generator for a wind application-compared with an interior mounted permanent magnet synchronous generator. In Proceedings of the 7th IET International Conference on Power Electronics, Machines and Drives (PEMD 2014), Manchester, UK, 8–10 April 2014; pp. 1–5. [Google Scholar]
- Dmitrievskii, V.; Prakht, V.; Kazakbaev, V. Synchronous reluctance generator with ferrite magnets for wind turbine. Proc. J. Phys. Conf. Ser. 2018, 1102, 012041. [Google Scholar] [CrossRef]
- Friedrich, G. Experimental comparison between wound rotor and permanent magnet synchronous machine for integrated starter generator applications. In Proceedings of the 2010 IEEE Energy Conversion Congress and Exposition, Atlanta, GA, USA, 12–16 September 2010; pp. 1731–1736. [Google Scholar]
- Ramadan, H.; Youssef, A.l.-R.; Mousa, H.H.H.; Mohamed, E.E.M. An efficient variable-step P&O maximum power point tracking technique for grid-connected wind energy conversion system. SN Appl. Sci. 2019, 1, 1–15. [Google Scholar]
- Verma, N.; Banerjee, S.; Gupta, S.; Goyal, S.; Sharma, R. PMSG based WECS with MPPT via modified P&O algorithm. In Proceedings of the 2019 3rd International Conference on Recent Developments in Control, Automation & Power Engineering (RDCAPE), Noida, India, 10–11 October 2019; pp. 646–650. [Google Scholar]
- Kumar, M.B.H.; Saravanan, B.; Sanjeevikumar, P.; Blaabjerg, F. Review on control techniques and methodologies for maximum power extraction from wind energy systems. IET Renew. Power Gener. 2018, 12, 1609–1622. [Google Scholar] [CrossRef]
- Dursun, E.H.; Kulaksiz, A.A. Second-order sliding mode voltage-regulator for improving MPPT efficiency of PMSG-based WECS. Int. J. Electr. Power Energy Syst. 2020, 121, 106149. [Google Scholar] [CrossRef]
- Ganjefar, S.; Ghassemi, A.A.; Ahmadi, M.M. Improving efficiency of two-type maximum power point tracking methods of tip-speed ratio and optimum torque in wind turbine system using a quantum neural network. Energy 2014, 67, 444–453. [Google Scholar] [CrossRef]
- Zebraoui, O.; Bouzi, M. Comparative study of different MPPT methods for wind energy conversion system. In Proceedings of the IOP Conference Series: Earth and Environmental Science, FST Fez, Morocco, 8–9 November 2017; Volume 161, p. 012023. [Google Scholar]
- Tiwari, R.; Babu, N.R. Fuzzy logic based MPPT for permanent magnet synchronous generator in wind energy conversion system. IFAC-PapersOnLine 2016, 49, 462–467. [Google Scholar] [CrossRef]
- Wang, Y.; Yu, Y.; Cao, S.; Zhang, X.; Gao, S. A review of applications of artificial intelligent algorithms in wind farms. Artif. Intell. Rev. 2020, 53, 3447–3500. [Google Scholar] [CrossRef]
- Morimoto, S.; Nakayama, H.; Sanada, M.; Takeda, Y. Sensorless output maximization control for variable-speed wind generation system using IPMSG. IEEE Trans. Ind. Appl. 2005, 41, 60–67. [Google Scholar] [CrossRef]
- Soufyane, B.; Abdelhamid, R.; Smail, Z.; Elhafyani, M.L.; El Hajjaji, A. Fully Robust Sensorless Control of Direct-Drive PMSG Wind Turbine Feeding a Water Pumping System. IFAC-PapersOnLine 2020, 53, 12797–12802. [Google Scholar] [CrossRef]
- Zheng, X.; Li, L.; Xu, D.; Platts, J. Sliding mode MPPT control of variable speed wind power system. In Proceedings of the 2009 Asia-Pacific Power and Energy Engineering Conference, Wuhan, China, 28–30 March 2009; pp. 1–4. [Google Scholar]
- Avila, E.; Pozo, M.; Camacho, O.; Leica, P.; Ortega, L.; Gallardo, C.; Dominguez, X. Sliding-mode control in a cascade scheme for a PMSG based wind energy conversion system. In Proceedings of the 2017 IEEE Second Ecuador Technical Chapters Meeting (ETCM), Salinas, Ecuador, 16–20 October 2017; pp. 1–6. [Google Scholar]
- Jingfeng, M.; Aihua, W.; Guoqing, W.; Xudong, Z. Maximum power point tracking in variable speed wind turbine system via optimal torque sliding mode control strategy. In Proceedings of the 2015 34th Chinese Control Conference (CCC), Hangzhou, China, 28–30 July 2015; pp. 7967–7971. [Google Scholar]
- Bianchi, F.D.; Mantz, R.J.; De Battista, H. The wind and wind turbines. Wind Turbine Control Systems: Principles, Modelling and Gain Scheduling Design; Springer Science & Business Media: London, UK, 2007; pp. 7–28. [Google Scholar]
- Masters, G.M. Renewable and Efficient Electric Power Systems; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- Chun, G.; Ganeshkumar, P.; Ahmed, A.; Park, J. Design of MPPT controller for small scale wind power system with PMSG. In Proceedings of the 2012 15th International Conference on Electrical Machines and Systems (ICEMS), Sapporo, Japan, 21–24 October 2012; pp. 1–4. [Google Scholar]
- Kloppers, C.; Garner, K.S.; Kamper, M.J. Design and optimisation of a 16/18 wound rotor wind synchronous generator with non-overlap winding. In Proceedings of the 26th Southern African Universities Power and Engineering Conference, Johannersburg, South Africa, 24–26 January 2018. [Google Scholar]
- Hwang, S.M.; Eom, J.B.; Jung, Y.H.; Lee, D.W.; Kang, B.S. Various design techniques to reduce cogging torque by controlling energy variation in permanent magnet motors. IEEE Trans. Magn. 2001, 37, 2806–2809. [Google Scholar] [CrossRef]
- Labuschagne, C.; Kamper, M.J. Coordinate descent method to minimize cogging torque in small-scale wind generators. In Proceedings of the Southern African Sustainable Energy Conference, Stellenbosch, South Africa, 17–19 November 2021; pp. 182–187. [Google Scholar]
- Powell, M.J. An efficient method for finding the minimum of a function of several variables without calculating derivatives. Comput. J. 1964, 7, 155–162. [Google Scholar] [CrossRef]
- Fitzgerald, A.E.; Kingsley, C.; Umans, S.D. Electric Machinery, 6th ed.; McGraw Hill: New York, NY, USA, 2003. [Google Scholar]
- Mabhula, M.; Kamper, M. Saliency and mutual inductance effect in cylindrical wound-rotor synchronous motor. In Proceedings of the 2017 IEEE Workshop on Electrical Machines Design, Control and Diagnosis (WEMDCD), Nottingham, UK, 20–21 April 2017; pp. 152–157. [Google Scholar]
- Hittinger, C.; Hahn, I. Modeling of an IPMSM with short-circuited rotor winding for sensorless position estimation by FEA using the frozen permeability method. In Proceedings of the IECON 2017-43rd Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 29 October–1 November 2017; pp. 2067–2072. [Google Scholar]
- Chen, J.; Li, J.; Qu, R.; Ge, M. Magnet-frozen-permeability FEA and DC-biased measurement for machine inductance: Application on a variable-flux PM machine. IEEE Trans. Ind. Electron. 2017, 65, 4599–4607. [Google Scholar]
- Dube, L.; Garner, K.S.; Kamper, M.J. Multi three-phase converter-fed performance of non-overlapping winding wound rotor synchronous wind generator. In Proceedings of the 2022 International Conference on Electrical Machines (ICEM), Valencia, Spain, 5–8 September 2022. [Google Scholar]





























| Parameter | Value |
|---|---|
| Rated power | kW |
| Rated speed | 320 r/min |
| Rated frequency | Hz |
| Rated torque | Nm |
| Stator outer diameter | 260 mm |
| Rotor outer diameter | mm |
| Rotor inner diameter | 60 mm |
| Stack length | 125 mm |
| Air gap | mm |
| Stator turns per coil | 67 |
| Rotor turns per coil | 150 |
| Parameter | Base WRSG | Optimized WRSG |
|---|---|---|
| (mm) | 6.25 | 3.43 |
| (mm) | 2.00 | 0.51 |
| (mm) | 2.00 | 1.55 |
| Torque ripple (%) | 15.5 | 7.77 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dube, L.; Garner, G.C.; Garner, K.S.; Kamper, M.J. Simple and Robust MPPT Current Control of a Wound Rotor Synchronous Wind Generator. Energies 2023, 16, 3290. https://doi.org/10.3390/en16073290
Dube L, Garner GC, Garner KS, Kamper MJ. Simple and Robust MPPT Current Control of a Wound Rotor Synchronous Wind Generator. Energies. 2023; 16(7):3290. https://doi.org/10.3390/en16073290
Chicago/Turabian StyleDube, Lucky, Graham C. Garner, Karen S. Garner, and Maarten J. Kamper. 2023. "Simple and Robust MPPT Current Control of a Wound Rotor Synchronous Wind Generator" Energies 16, no. 7: 3290. https://doi.org/10.3390/en16073290
APA StyleDube, L., Garner, G. C., Garner, K. S., & Kamper, M. J. (2023). Simple and Robust MPPT Current Control of a Wound Rotor Synchronous Wind Generator. Energies, 16(7), 3290. https://doi.org/10.3390/en16073290