
An Online Control Method of Reactive Power and Voltage Based on Mechanism–Data Hybrid Drive Model Considering Source–Load Uncertainty


Abstract
:1. Introduction
2. Source–Load Uncertainty Model
2.1. Renewable Energy Uncertainty Model
2.2. Load Uncertainty Model
3. Reactive Power Optimization Model Based on Mixed Integer SOCP
3.1. The Objective Function
3.2. The Constraints
- Distflow constraints [26]
- 2.
- DG operation constraints:
- 3.
- Capacitor bank operation constraints:
- 4.
- SVC operation constraints:
- 5.
- OLTC operation constrains:
- 6.
- Security constraints:
3.3. Second-Order Cone Relaxation
4. Online Control Model of Reactive Power and Voltage Based on MDHD
4.1. CNN–GRU Network
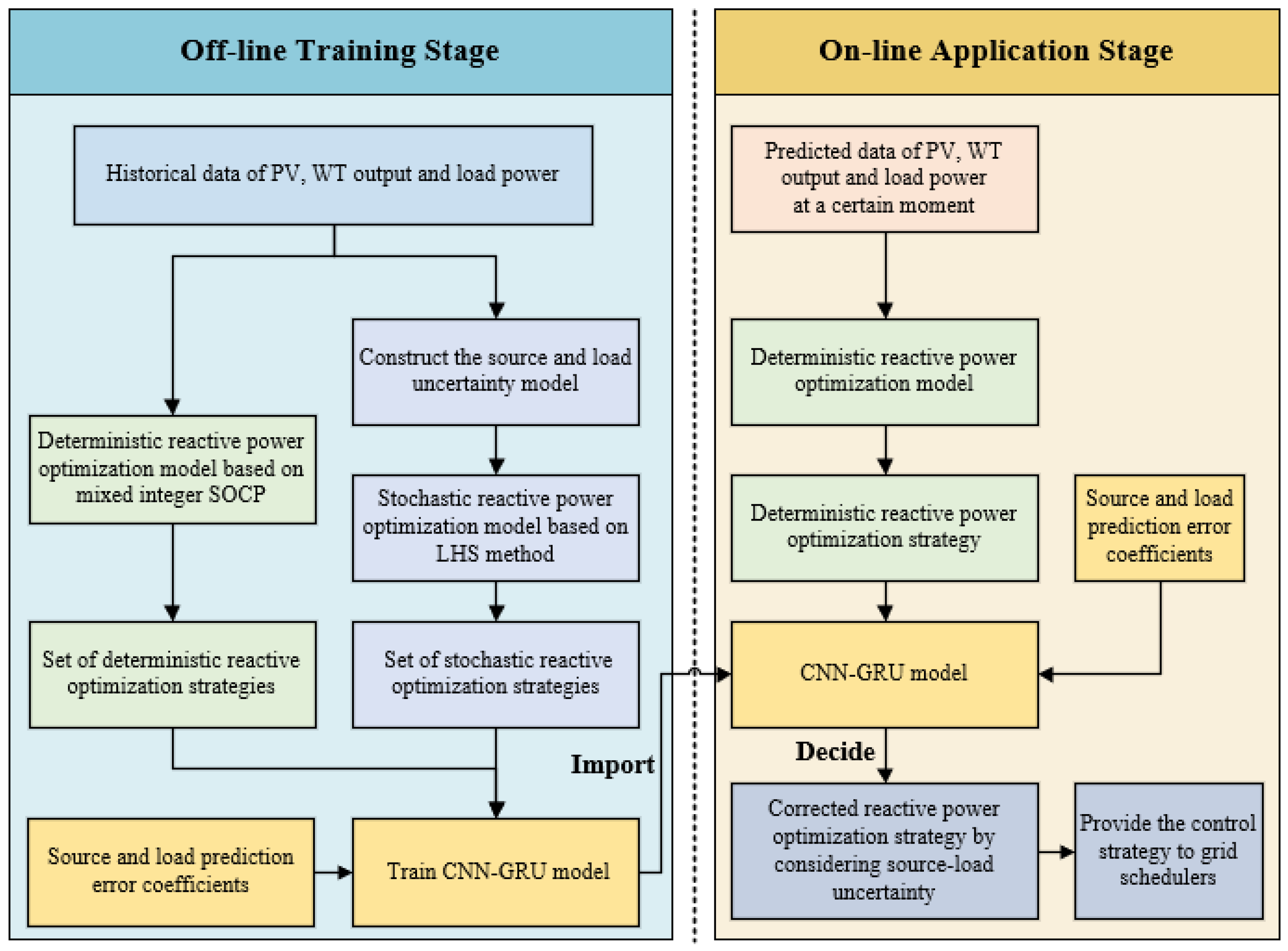
4.2. Online Reactive Power and Voltage Control Model Based on MDHD
- (1)
- Based on the historical data, the source and load prediction error coefficients at a certain time were determined, and then the source and load uncertainty models were constructed. On this basis, the LHS method was used to generate several groups of source and load scenarios.
- (2)
- The deterministic reactive power optimization was carried out with each group of scenarios as boundary conditions in turn, and the results were statistically analyzed. The expected values of the positions of the OLTC, the switching sets of the capacitor bank, and the reactive power compensation of the SVC was taken as the reactive power control strategy obtained by stochastic optimization.
- (3)
- Steps (1) and (2) were performed for the WT, PV and load historical power data, and the set of reactive power strategies were stored in the historical strategy library, denoted as . represents the reactive power control strategy obtained by the stochastic optimization model at time .
- (4)
- For the above WT, PV and load historical power data, the deterministic model based on mixed integer second-order cone programming was used for reactive power optimization. The set of reactive power control strategies obtained at each time was noted as .
- (5)
- The set of reactive power control strategies obtained from the deterministic optimization model and the set of source and load prediction error coefficients were spliced vertically as the input features, and the set of reactive power strategies obtained from the stochastic optimization model was used as output labels to construct the data sample set and train the CNN–GRU model. The discrete variables in and were converted into a binary-coded form.
- (1)
- The WT, PV and load power for a future time was predicted and noted as . Where was the predicted value of the PV output, was the predicted value of the WT output and was the predicted value of the load power.
- (2)
- The predicted data was input into the deterministic reactive power optimization model to obtain the initial reactive power strategy .
- (3)
- and the source and load prediction error coefficients at that time were input into the CNN–GRU model which had already been trained offline. The output was the corrected reactive power optimization strategy, considering the source–load uncertainty.
- (4)
- The reactive power control strategy was decoded and sent into the grid to provide auxiliary decisions for the schedulers.

5. Results and Discussion
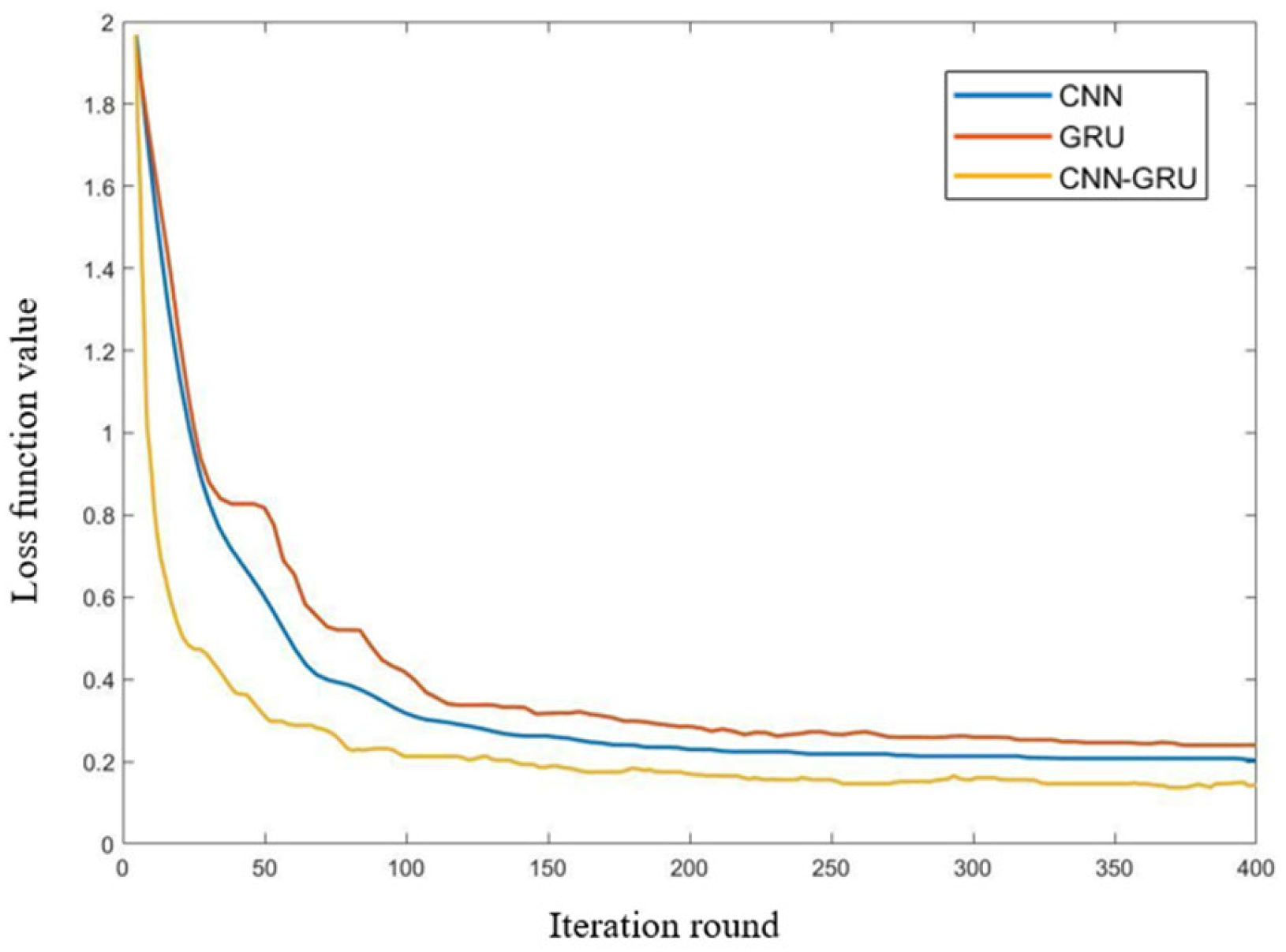
5.1. Analysis of Offline Model Training
5.2. Analysis of Online Application Performance
- Analysis of Online Application Effective
- (1)
- Since the effect of source–load fluctuation was not considered, the strategy solved by the deterministic model was partially different compared to the other two models, and the power compensation of each reactive power compensation device was smaller than the other two models.
- (2)
- Compared with the stochastic model, the reactive power strategy of the hybrid-driven model had completely consistent results for the discrete variables, and the maximum deviation of the continuous variable results was 3.78%, which shows that the hybrid-driven model has a similar level of solution performance as the stochastic optimization model in dealing with the source–load uncertainty.
- (3)
- In terms of computation rapidity, the computation time of the stochastic optimization model was 205.13 s due to the simulation of a large number of scenarios, while the computation time of the hybrid-driven model was 2.69 s, which is only 1.31% of that of the stochastic model, and only 0.77 s slower than that of the deterministic model, indicating that the hybrid-driven model can effectively ensure the rapidity requirement for online application.
- 2.
- Analysis of the Adaptation to Source–load Uncertainty
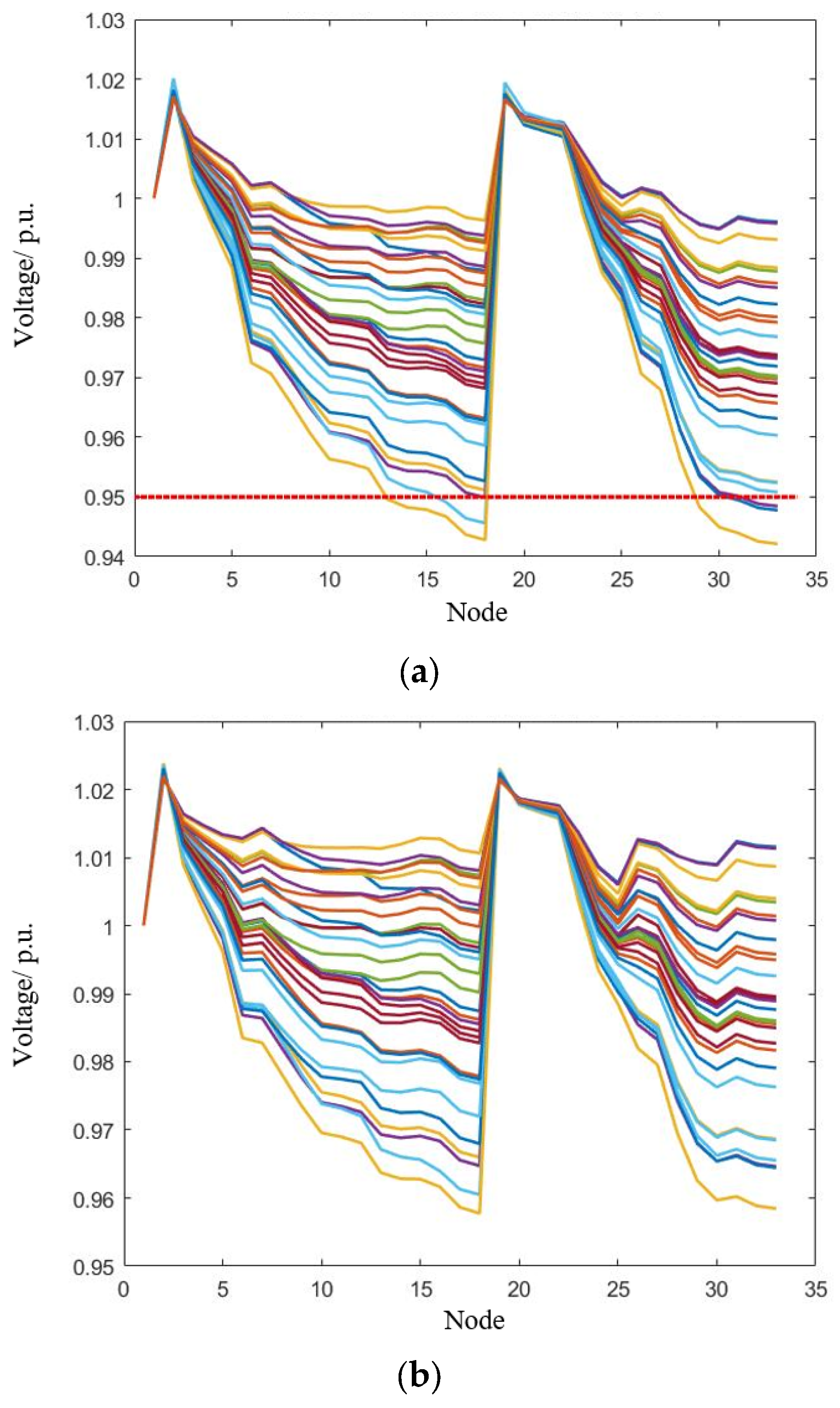
- (1)
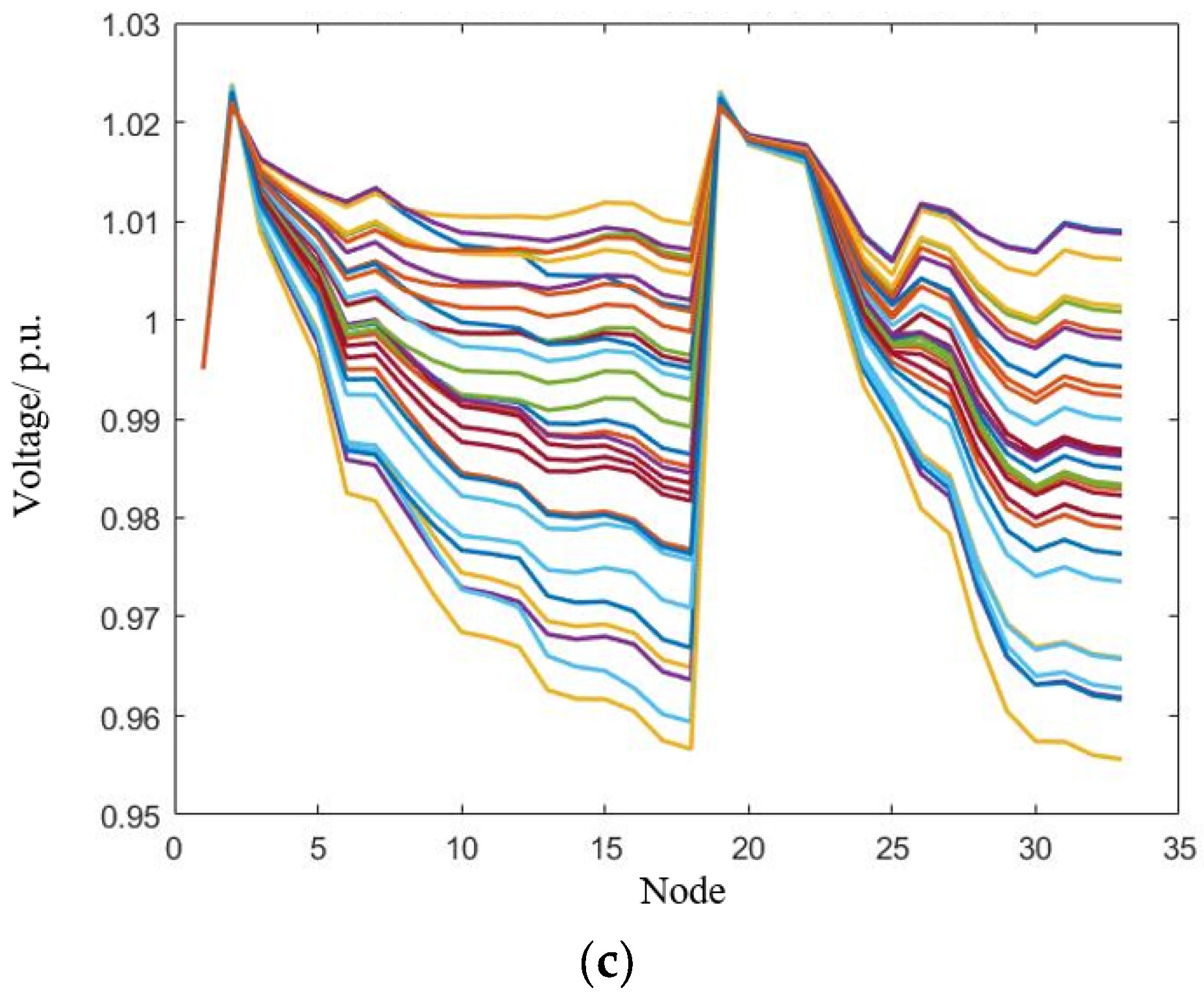
- In all simulated source–load scenarios, the reactive power strategies of both the hybrid-driven model and the stochastic model did not lead to voltage violations, while the reactive power strategy of the deterministic model may lead to voltage exceeding the lower limits in the three scenarios, with the lowest voltage of 0.9428 p.u.
- (2)
- The average voltage expectation of the hybrid-driven model was improved by 1.56% and the average voltage offset expectation was decreased by 27.08% compared to the deterministic model. This indicates that the hybrid-driven model performs well in most scenarios.
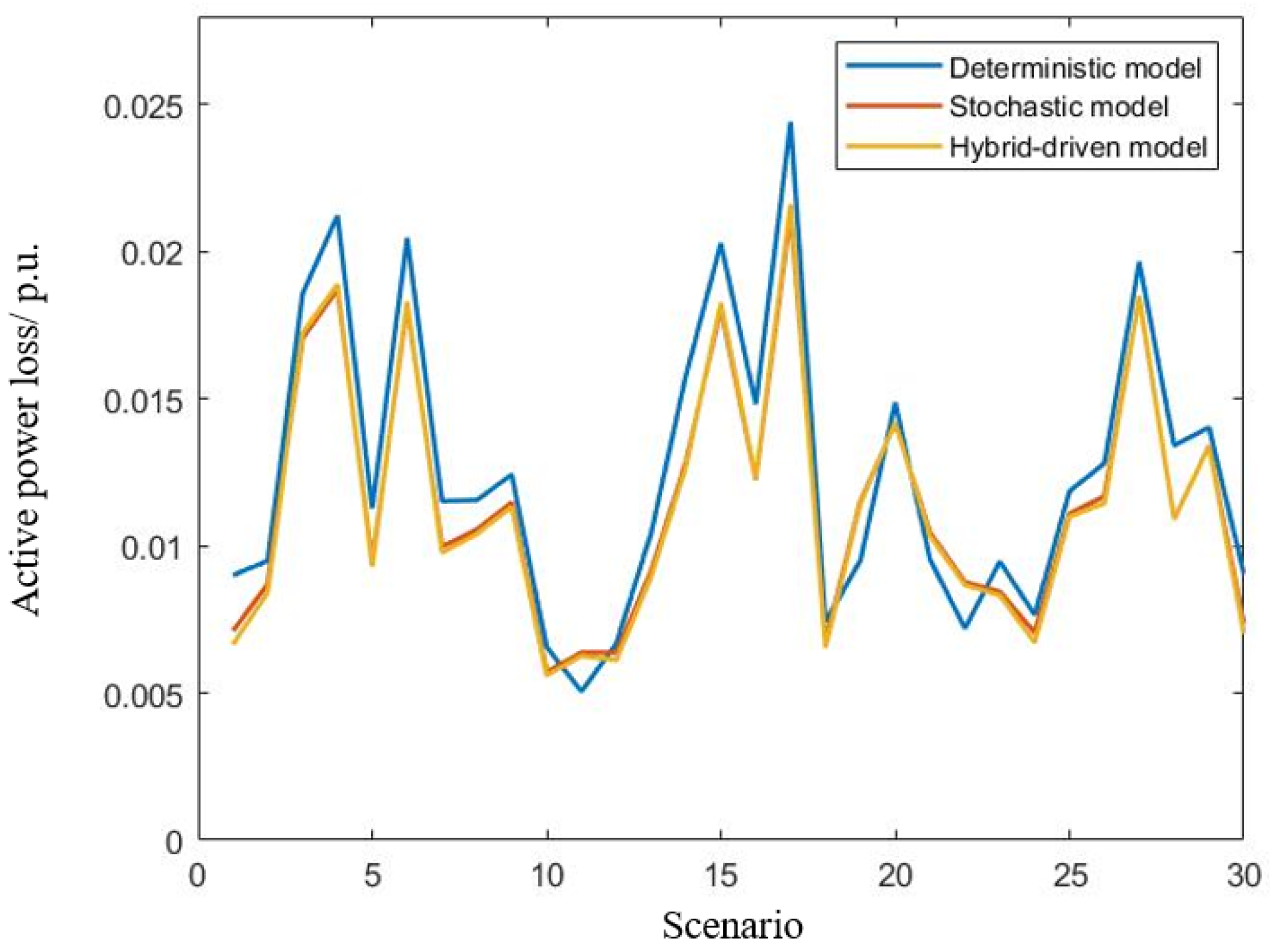
- (3)
- In most scenarios, the active power loss values corresponding to both the stochastic model and hybrid-driven model were smaller than those of the deterministic model. However, in some scenarios, such as scenario 11, scenario 19, scenario 21 and scenario 22, the deterministic optimization model performed better. Through further analysis, the simulated source and load data in these four scenarios were close to the predicted data, which shows that the deterministic optimization strategy based on the predicted data performed better.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Average Voltage Expectation/p.u. | Average Voltage Offset Expectation/p.u. | Number of Voltage Violations | |
|---|---|---|---|
| Deterministic model | 0.9821 | 1.662 | 3 |
| Stochastic model | 0.9982 | 1.208 | -- |
| Hybrid-driven model | 0.9974 | 1.212 | -- |
5.3. Analysis of the Influence of the Distributed Generation Prediction Error
- (1)
- When the prediction error coefficients of WT and PV output did not exceed 10%, the expected value of active power loss corresponding to the deterministic model optimization strategy was smaller than that of the hybrid-driven model. When the prediction error coefficients were greater than 10%, the expected value of active power loss corresponding to the deterministic model optimization strategy started to increase significantly, and was higher than that of the hybrid-driven model.
- (2)
- When the prediction error coefficients reached 20%, the optimization strategy of the hybrid-driven model began to incur voltage violations in some scenarios. The deterministic model incurred voltage violations at the prediction error coefficient of 15%, with a much higher probability than the hybrid-driven model.
6. Conclusions
- (1)
- Compared with the stochastic optimization model, the proposed hybrid-driven model has outstanding advantages in terms of calculation speed, as it can significantly reduce the calculation time while ensuring the reasonableness of the results. Furthermore, compared with the deterministic optimization model, the hybrid-driven model has outstanding advantages in terms of adaptability to source–load uncertainty, as it reduces the system active power loss and voltage violation risk to a certain extent. Therefore, the hybrid-driven model can effectively satisfy the requirements for online voltage control;
- (2)
- Under different levels of distributed generation output prediction errors, the hybrid-driven model has excellent adaptability in terms of system economy and security. Therefore, it can be better applied to distribution system operation scenarios with large-scale distributed generations access.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
| Branch No. | From Node | To Node | Impedance (Ω) |
|---|---|---|---|
| 1 | 1 | 2 | 0.0922 + j0.0470 |
| 2 | 2 | 3 | 0.4930 + j0.2511 |
| 3 | 3 | 4 | 0.3660 + j0.1864 |
| 4 | 4 | 5 | 0.3811 + j0.1941 |
| 5 | 5 | 6 | 0.8190 + j0.7070 |
| 6 | 6 | 7 | 0.1872 + j0.6188 |
| 7 | 7 | 8 | 0.7114 + j0.2351 |
| 8 | 8 | 9 | 1.0300 + j0.7400 |
| 9 | 9 | 10 | 1.0440 + j0.7400 |
| 10 | 10 | 11 | 0.1966 + j0.0650 |
| 11 | 11 | 12 | 0.3744 + j0.1238 |
| 12 | 12 | 13 | 1.4680 + j1.1550 |
| 13 | 13 | 14 | 0.5416 + j0.7129 |
| 14 | 14 | 15 | 0.5910 + j0.5260 |
| 15 | 15 | 16 | 0.7463 + j0.5450 |
| 16 | 16 | 17 | 1.2890 + j1.7210 |
| 17 | 17 | 18 | 0.7320 + j0.5740 |
| 18 | 2 | 19 | 0.1640 + j0.1565 |
| 19 | 19 | 20 | 1.5042 + j1.3554 |
| 20 | 20 | 21 | 0.4095 + j0.4784 |
| 21 | 21 | 22 | 0.7089 + j0.9373 |
| 22 | 3 | 23 | 0.4512 + j0.3083 |
| 23 | 23 | 24 | 0.8980 + j0.7091 |
| 24 | 24 | 25 | 0.8960 + j0.7011 |
| 25 | 6 | 26 | 0.2030 + j0.1034 |
| 26 | 26 | 27 | 0.2842 + j0.1447 |
| 27 | 27 | 28 | 1.0590 + j0.9337 |
| 28 | 28 | 29 | 0.8042 + j0.7006 |
| 29 | 29 | 30 | 0.5075 + j0.2585 |
| 30 | 30 | 31 | 0.9744 + j0.9630 |
| 31 | 31 | 32 | 0.3105 + j0.3619 |
| 32 | 32 | 33 | 0.3410 + j0.5362 |
References
- Liu, J.; Zhang, Y. Has carbon emissions trading system promoted non-fossil energy development in China? Appl. Energy 2021, 302, 117613. [Google Scholar] [CrossRef]
- Liu, W.; Zhan, J.; Chung, C.; Li, Y. Day-ahead optimal operation for multi-energy residential systems with renewables. IEEE Trans. Sustain. Energy 2018, 10, 1927–1938. [Google Scholar] [CrossRef]
- Chen, S.; Hu, W.; Du, Y.; Wang, S.; Zhang, C.; Chen, Z. Three-stage relaxation-weightsum-correction based probabilistic reactive power optimization in the distribution network with multiple wind generators. Int. J. Electr. Power Energy Syst. 2022, 141, 108146. [Google Scholar] [CrossRef]
- Wu, W.; Tian, Z.; Zhang, B. An Exact Linearization Method for OLTC of Transformer in Branch Flow Model. IEEE Trans. Power Syst. 2017, 32, 2475–2476. [Google Scholar] [CrossRef]
- Li, P.; Jin, B.; Wang, D.; Zhang, B. Distribution system voltage control under uncertainties using tractable chance constraints. IEEE Trans. Power Syst. 2018, 34, 5208–5216. [Google Scholar] [CrossRef]
- Biswas, P.; Suganthan, P.; Mallipeddi, R.; Amaratunga, G. Optimal reactive power dispatch with uncertainties in load demand and renewable energy sources adopting scenario-based approach. Appl. Soft Comput. 2019, 75, 616–632. [Google Scholar] [CrossRef]
- Zhao, P.; Gu, C.; Xiang, Y.; Zhang, X.; Shen, Y.; Li, S. Reactive power optimization in integrated electricity and gas systems. IEEE Syst. J. 2020, 15, 2744–2754. [Google Scholar] [CrossRef]
- Ding, T.; Liu, S.; Yuan, W.; Bie, Z.; Zeng, B. A Two-Stage Robust Reactive Power Optimization Considering Uncertain Wind Power Integration in Active Distribution Networks. IEEE Trans. Sustain. Energy 2016, 7, 301–311. [Google Scholar] [CrossRef]
- Xu, Y.; Zhang, W.; Liu, W.; Ferrese, F. Multiagent-Based Reinforcement Learning for Optimal Reactive Power Dispatch. IEEE Trans. Syst. Man Cybern. Part C 2012, 42, 1742–1751. [Google Scholar] [CrossRef]
- Liu, S.; Ding, C.; Wang, Y.; Zhang, Z.; Chu, M.; Wang, M. Deep Reinforcement Learning-Based Voltage Control Method for Distribution Network with High Penetration of Renewable Energy. In Proceedings of the 2021 IEEE Sustainable Power and Energy Conference (iSPEC), Nanjing, China, 23–25 December 2021. [Google Scholar]
- Ding, T.; Yang, Q.; Yang, Y.; Li, C.; Bie, Z.; Blaabjerg, F. A Data-Driven Stochastic Reactive Power Optimization Considering Uncertainties in Active Distribution Networks and Decomposition Method. IEEE Trans. Smart Grid 2018, 9, 4994–5004. [Google Scholar] [CrossRef]
- Sheng, W.; Liu, K.; Niu, H.; Zhao, J. The anomalous data identification study of reactive power optimization system based on big data. In Proceedings of the International Conference on Probabilistic Methods Applied to Power Systems, Beijing, China, 16–20 October 2016. [Google Scholar]
- Cao, D.; Zhao, J.; Hu, W.; Ding, F.; Huang, Q.; Chen, Z.; Blaabjerg, F. Data-driven multi-agent deep reinforcement learning for distribution system decentralized voltage control with high penetration of PVs. IEEE Trans. Smart Grid 2021, 12, 4137–4150. [Google Scholar] [CrossRef]
- Li, F.; Wang, Q.; Hu, J.; Tang, Y. Combined data-driven and knowledge-driven methodology research advances and its applied prospect in power systems. Proc. CSEE 2021, 41, 4377–4389. [Google Scholar]
- Tan, Y.; Chen, Y.; Li, Y.; Cao, Y. Linearizing Power Flow Model: A Hybrid Physical Model-Driven and Data-Driven Approach. IEEE Trans. Power Syst. 2020, 35, 2475–2478. [Google Scholar] [CrossRef]
- Li, M.; Zheng, Y.; Tang, B.; Yu, G.; Wang, Z.; Muyeen, S.M. A Failure Assessment Method of Island Distribution Lines Based on Model-Data Hybrid Drive. IET Gener. Transm. Distrib. 2022, 16, 4867–4877. [Google Scholar] [CrossRef]
- Wang, Q.; Li, F.; Tang, Y.; Xu, Y. Integrating model-driven and data-driven methods for power system frequency stability assessment and control. IEEE Trans. Power Syst. 2019, 34, 4557–4568. [Google Scholar] [CrossRef]
- Tian, H.; Zhao, H.; Liu, C.; Chen, J.; Wu, Q.; Terzija, V. A dual-driven linear modeling approach for multiple energy flow calculation in electricity–heat system. Appl. Energy 2022, 314, 118872. [Google Scholar] [CrossRef]
- Sharma, S.; Verma, A.; Xu, Y.; Panigrahi, B. Robustly coordinated bi-level energy management of a multi-energy building under multiple uncertainties. IEEE Trans. Sustain. Energy 2019, 12, 3–13. [Google Scholar] [CrossRef]
- Su, P.; Liu, T.; Li, X. Determination of Optimal Spinning Reserve of Power Grid Containing Wind. Power Syst. Technol. 2010, 34, 158–162. [Google Scholar]
- Mohseni-Bonab, S.M.; Rabiee, A.; Mohammadi-Ivatloo, B.; Jalilzadeh, S.; Nojavan, S. A two-point estimate method for uncertainty modeling in multi-objective optimal reactive power dispatch problem. Int. J. Electr. Power Energy Syst. 2016, 75, 194–204. [Google Scholar] [CrossRef]
- Li, K.; Wang, R.; Lei, H.; Zhang, T.; Liu, Y.; Zheng, X. Interval prediction of solar power using an improved bootstrap method. Sol. Energy 2018, 159, 97–112. [Google Scholar] [CrossRef]
- Lee, Y.; Scholtes, S. Empirical prediction intervals revisited. Int. J. Forecast. 2014, 30, 217–234. [Google Scholar] [CrossRef]
- Xiao, T.; Pei, W.; Chen, N.; Wang, X.; Pu, T. Maximum operation duration assessment of isolated island considering the uncertainty of load reduction capability of air conditioner. Proc. CSEE 2019, 39, 4982–4994. [Google Scholar]
- Kabir, M.; Mishra, Y.; Bansal, R. Probabilistic load flow for distribution systems with uncertain PV generation. Appl. Energy 2016, 163, 343–351. [Google Scholar] [CrossRef]
- Gao, H.; Liu, J.; Wang, L. Robust Coordinated Optimization of Active and Reactive Power in Active Distribution Systems. IEEE Trans. Smart Grid 2018, 9, 4436–4447. [Google Scholar] [CrossRef]
- Sun, X.; Qiu, J.; Tao, Y.; Ma, Y.; Zhao, J. A multi-mode data-driven volt/var control strategy with conservation voltage reduction in active distribution networks. IEEE Trans. Sustain. Energy 2022, 13, 1073–1085. [Google Scholar] [CrossRef]
- Sajjad, M.; Khan, Z.A.; Ullah, A.; Hussain, T.; Ullah, W.; Lee, M.Y.; Baik, S.W. A novel CNN-GRU-based hybrid approach for short-term residential load forecasting. IEEE Access 2020, 8, 143759–143768. [Google Scholar] [CrossRef]
- Shao, M.; Wu, J.; Shi, C.; An, R.; Zhu, X.; Huang, X.; Cai, R. Reactive power optimization of distribution network based on data driven and deep belief network. Power Syst. Technol. 2019, 43, 1874–1885. [Google Scholar]
- Baran, M.E.; Wu, F.F. Network reconfiguration in distribution systems for loss reduction and load balancing. IEEE Trans. Power Deliv. 1989, 4, 1401–1407. [Google Scholar] [CrossRef]





| Grid-Connected Position | Range/kVar | Step/kVar | |
|---|---|---|---|
| CB1 | 15 | [0, 800] | 100 |
| CB2 | 26 | [0, 800] | |
| SVC1 | 7 | [−100, 1200] | continuous |
| >SVC2 | 31 | [−100, 1200] | |
| Grid-connected Position | Range | Step | |
| OLTC | 1–2 | [0.95, 1.05] | 0.025 |
| Grid-Connected Position | Total Capacity/kW | Power Factor | |
|---|---|---|---|
| WT1 | 19 | 1000 | 0.9 |
| WT2 | 30 | 800 | |
| PV1 | 16 | 1000 | |
| PV2 | 12 | 800 |
| RMSE | |
|---|---|
| CNN | 0.5164 |
| GRU | 0.5462 |
| CNN–GRU | 0.4472 |
| Active Power Strategy | Computation Time/s | |||||
|---|---|---|---|---|---|---|
| OLTC | CB1/Set | CB2/Set | SVC1/kVar | SVC2/kVar | ||
| Deterministic model | 0.975 | 3 | 5 | 432 | 738 | 1.92 |
| Stochastic model | 0.975 | 4 | 6 | 609 | 1079 | 205.13 |
| Hybrid-driven model | 0.975 | 4 | 6 | 586 | 1062 | 2.69 |
| Distributed Generation Prediction Error Coefficients | ||||||
|---|---|---|---|---|---|---|
| 5% | 10% | 15% | 20% | 25% | ||
| Active network loss expectation /kW | Deterministic model | 105.6 | 117.2 | 144.3 | 182.1 | 162.7 |
| Hybrid-driven model | 113.2 | 124.4 | 132.6 | 154.2 | 144.3 | |
| Number of Voltage violations | Deterministic model | -- | -- | 3 | 5 | 8 |
| Hybrid-driven model | -- | -- | -- | 2 | 4 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, X.; Zu, G.; Ding, Q.; Wei, R.; Wang, Y.; Wei, W. An Online Control Method of Reactive Power and Voltage Based on Mechanism–Data Hybrid Drive Model Considering Source–Load Uncertainty. Energies 2023, 16, 3501. https://doi.org/10.3390/en16083501
Huang X, Zu G, Ding Q, Wei R, Wang Y, Wei W. An Online Control Method of Reactive Power and Voltage Based on Mechanism–Data Hybrid Drive Model Considering Source–Load Uncertainty. Energies. 2023; 16(8):3501. https://doi.org/10.3390/en16083501
Chicago/Turabian StyleHuang, Xu, Guoqiang Zu, Qi Ding, Ran Wei, Yudong Wang, and Wei Wei. 2023. "An Online Control Method of Reactive Power and Voltage Based on Mechanism–Data Hybrid Drive Model Considering Source–Load Uncertainty" Energies 16, no. 8: 3501. https://doi.org/10.3390/en16083501
APA StyleHuang, X., Zu, G., Ding, Q., Wei, R., Wang, Y., & Wei, W. (2023). An Online Control Method of Reactive Power and Voltage Based on Mechanism–Data Hybrid Drive Model Considering Source–Load Uncertainty. Energies, 16(8), 3501. https://doi.org/10.3390/en16083501