

Positive Rail Voltage Rise Behavior and Inhibition Analysis of Regenerative Braking of Medium–Low-Speed Maglev Train


Abstract
:1. Introduction
- (1)
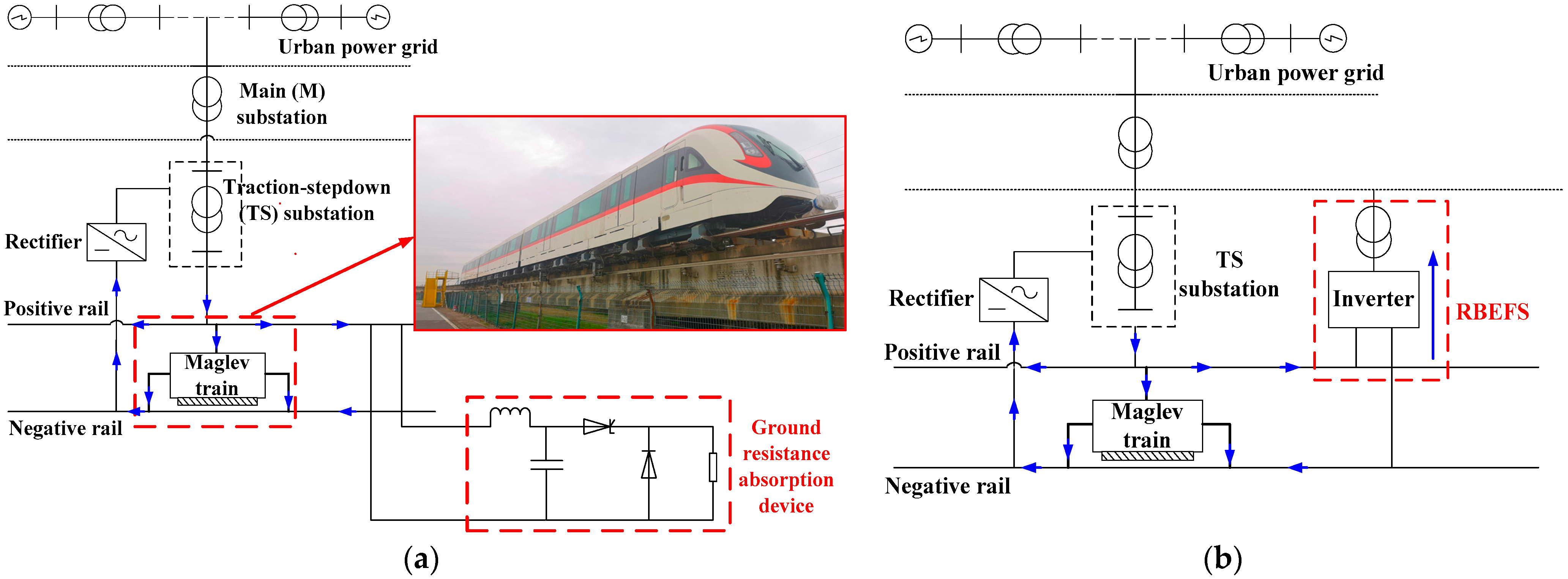
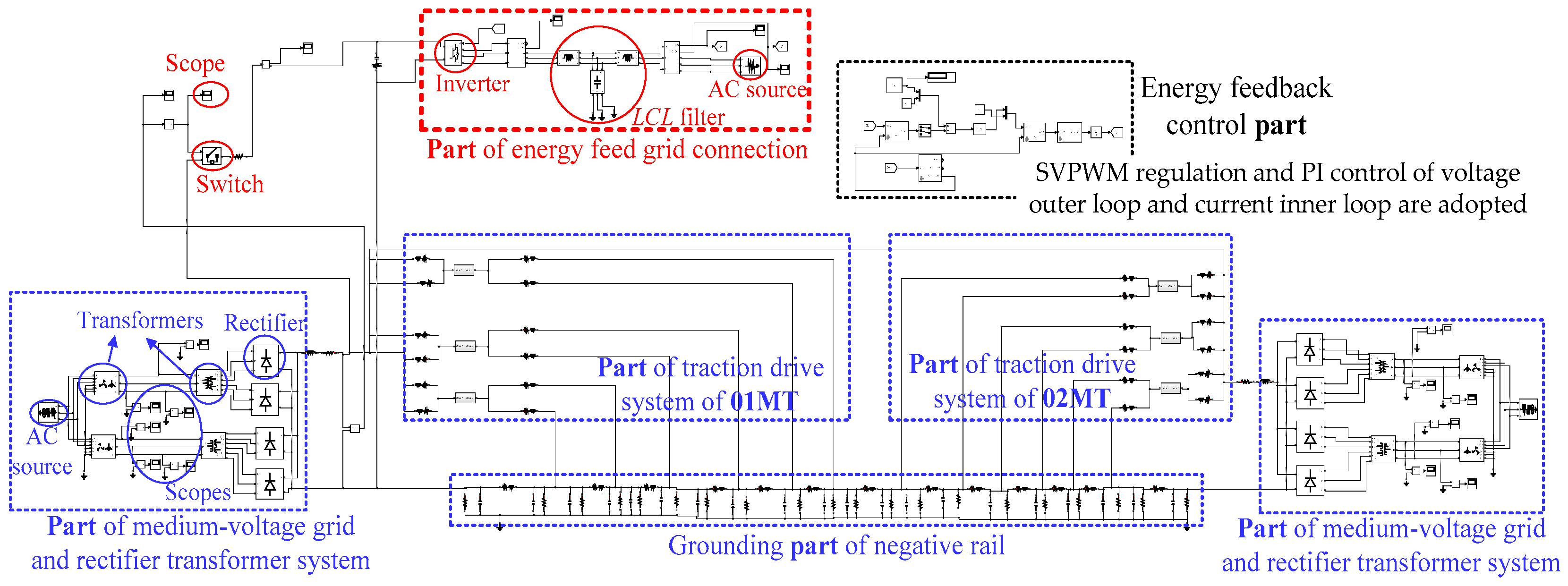
- A detailed modeling scheme of the vehicle–grid electrical power system with the RBEFS is established for the MLS maglev. The maglev motor characteristics are incorporated to accurately present the difference between wheeled and maglev transport, and the AC properties and energy dispersal path are considered in detail.
- (2)
- Important development prospects of the MLS maglev, namely, the DC 3 kV traction grid and 160~200 km/h vehicle speed, are firstly considered influence factors to reveal the grid voltage rise behavior and the influence of over-voltage inhibition with the RBEFS.

2. Vehicle–Grid Electrical Power Modeling Considering the RBEFS
2.1. Modeling of the Vehicle–Grid Electrical Power System
2.1.1. Traction Grid Part
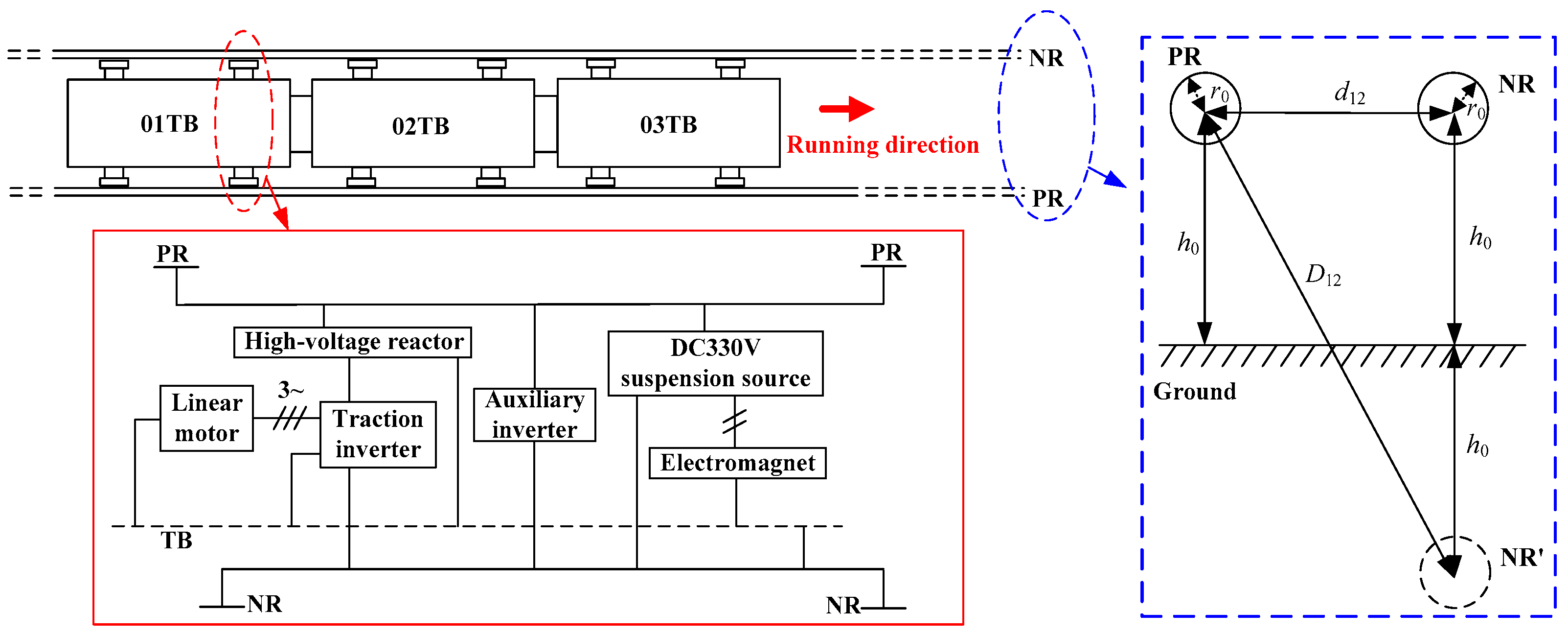
2.1.2. Vehicle Part
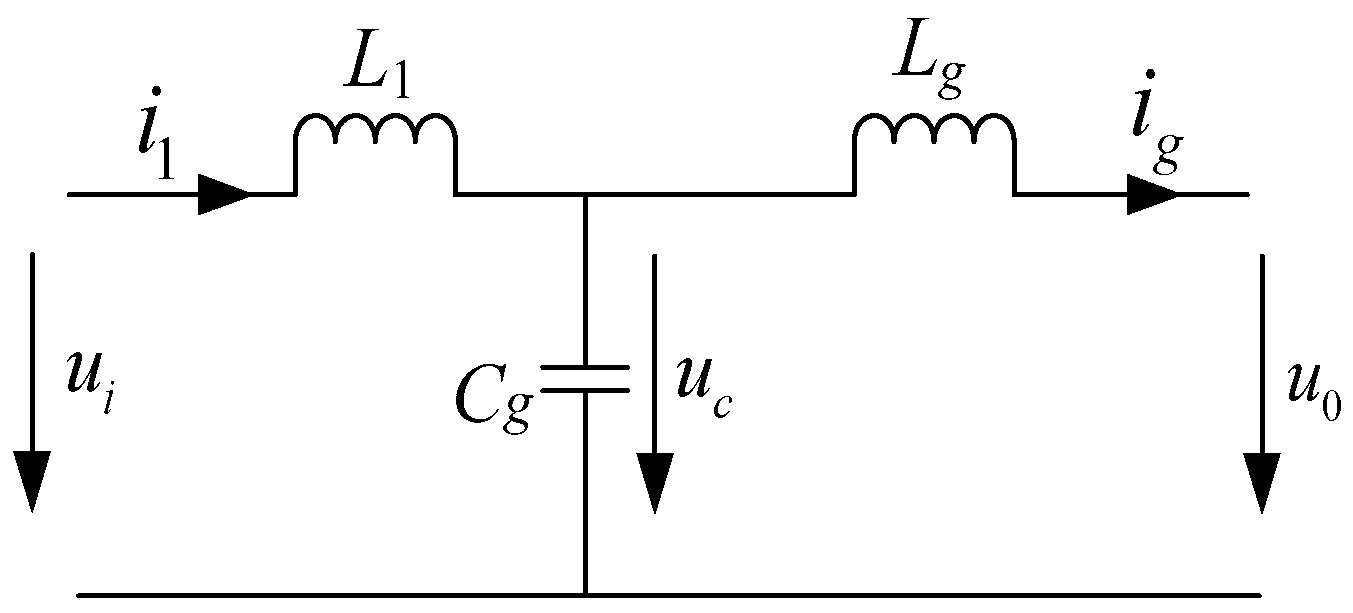
2.2. Modeling of the RBEFS
- (1)
- The voltage drop caused by the filter inductance is larger than or equal to 10% of the medium-voltage grid rated voltage.
- (2)
- The resonance peak value should appear in the medium-frequency band. Therefore, the resonant frequency, fres, shall meet the following requirement:

2.3. Integration Model and Its Verification
3. Analyses of Positive Rail Voltages under Multiple Interfering Factors
3.1. Influence of RB Power
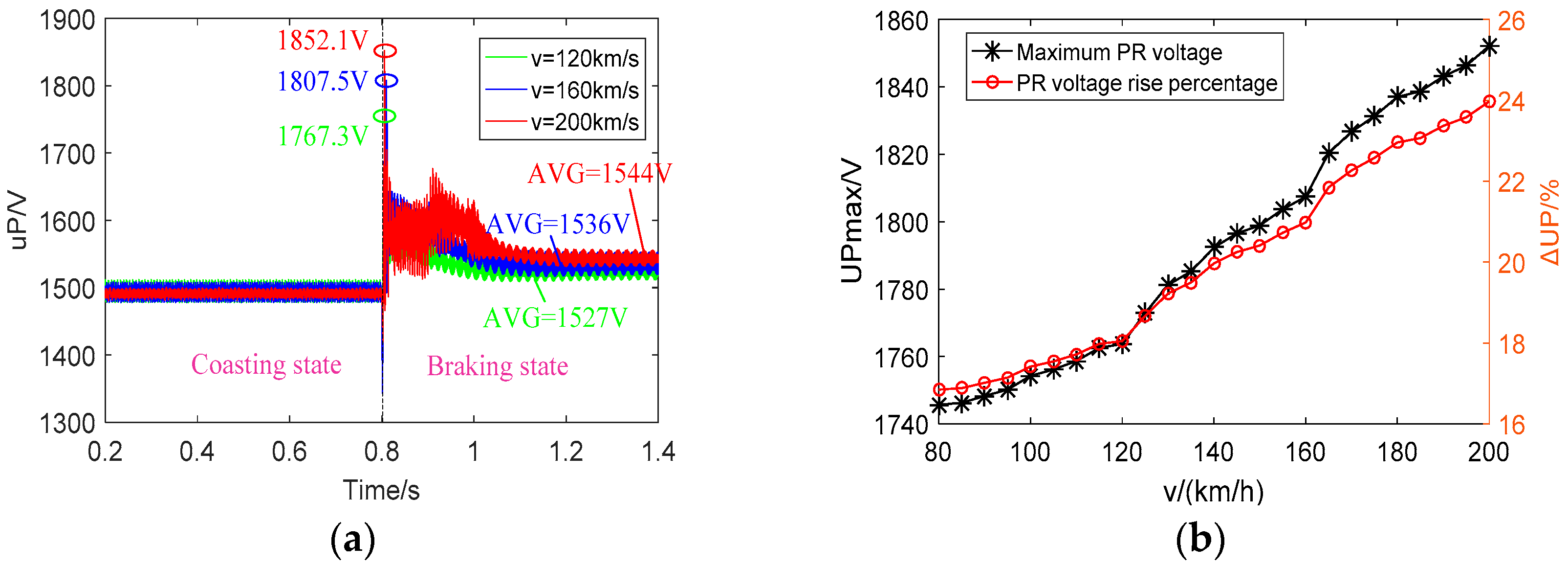
3.1.1. Comparison of Different MT Speeds
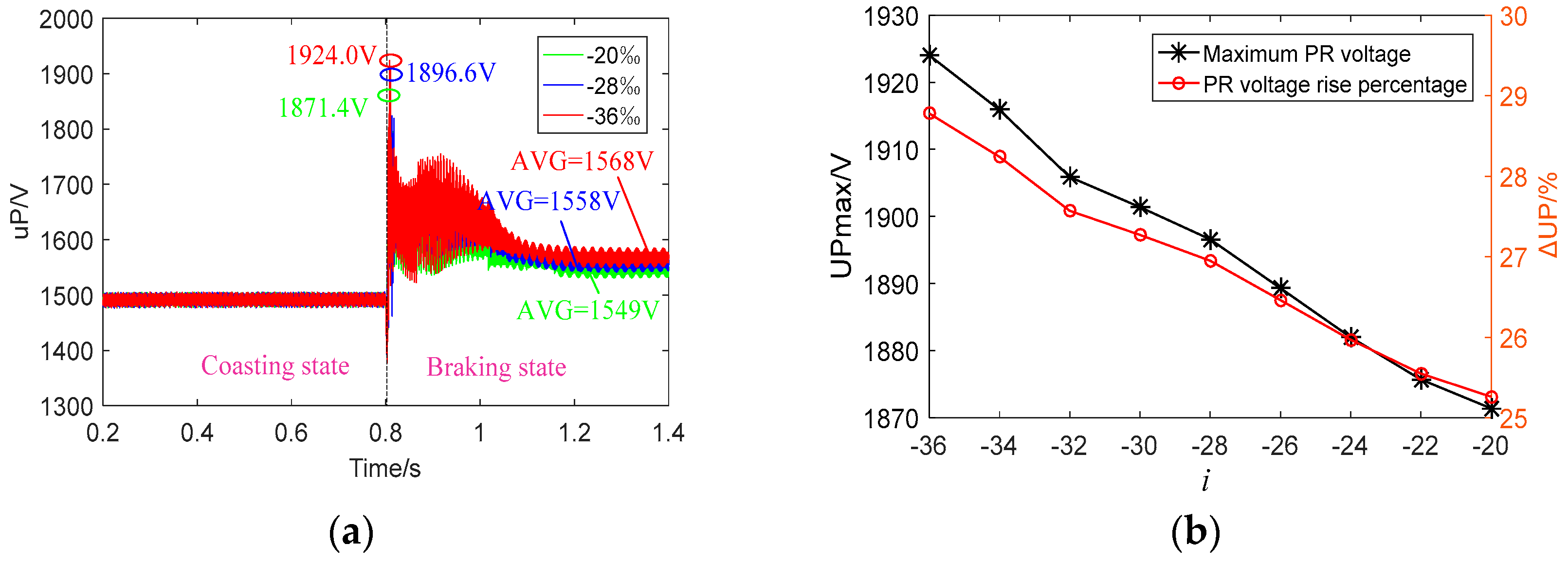
3.1.2. Comparison of Different Downhill Slope Gradients
3.2. Influence of PR Impedance
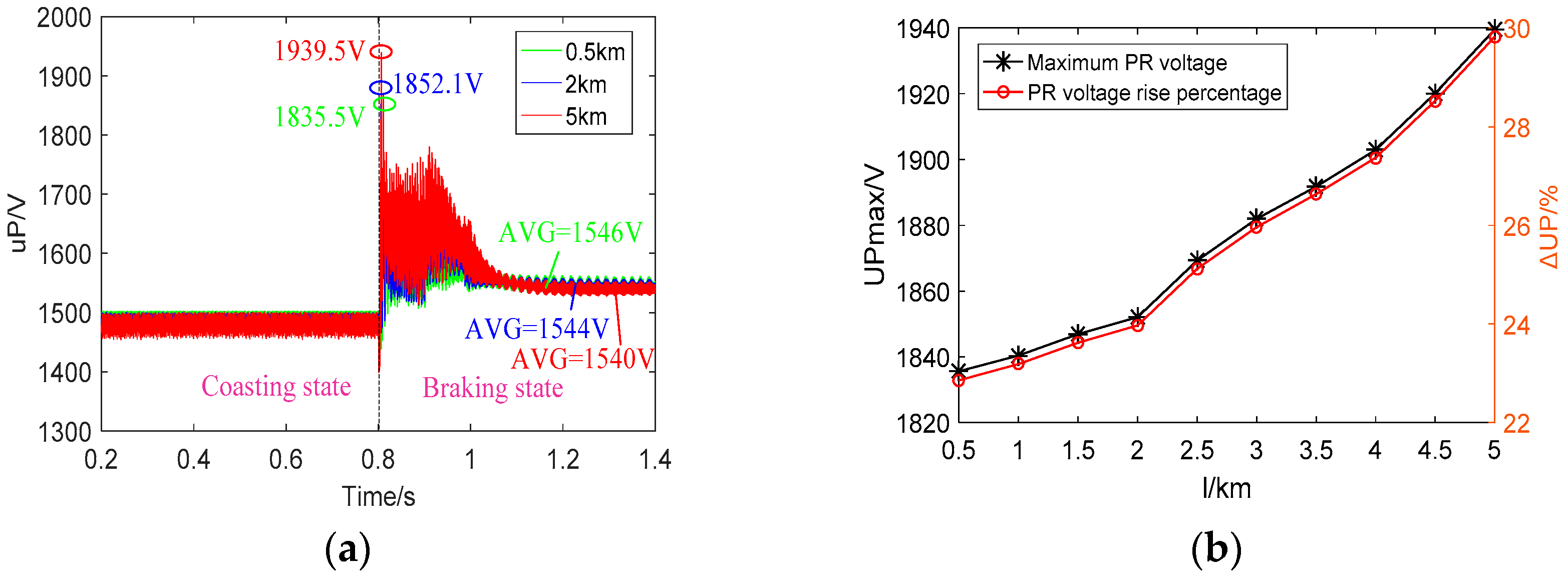
3.2.1. Comparison of Different RB Occurrence Locations
3.2.2. Comparison of Different Power Supply Modes
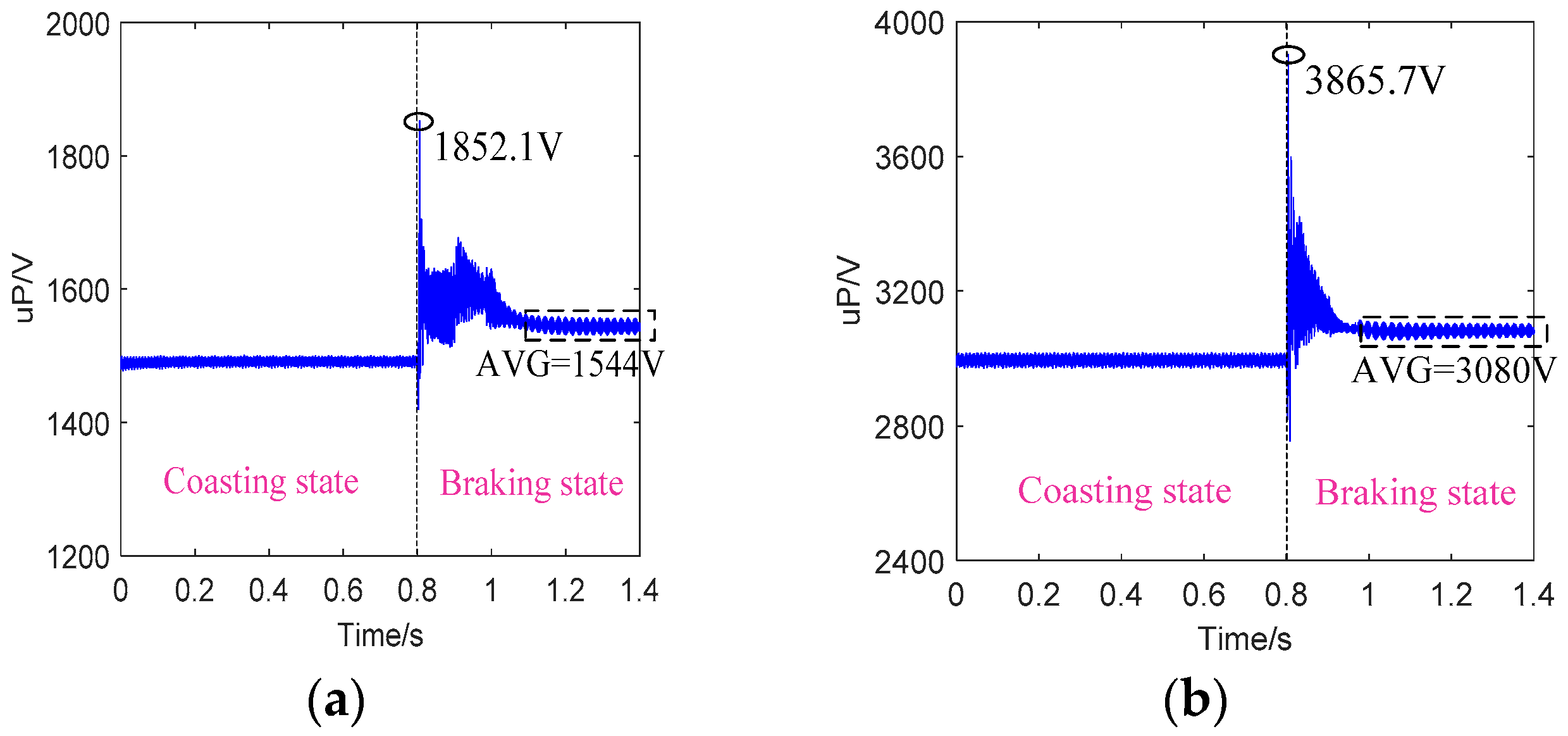
3.3. Influence of Supply Voltage Level
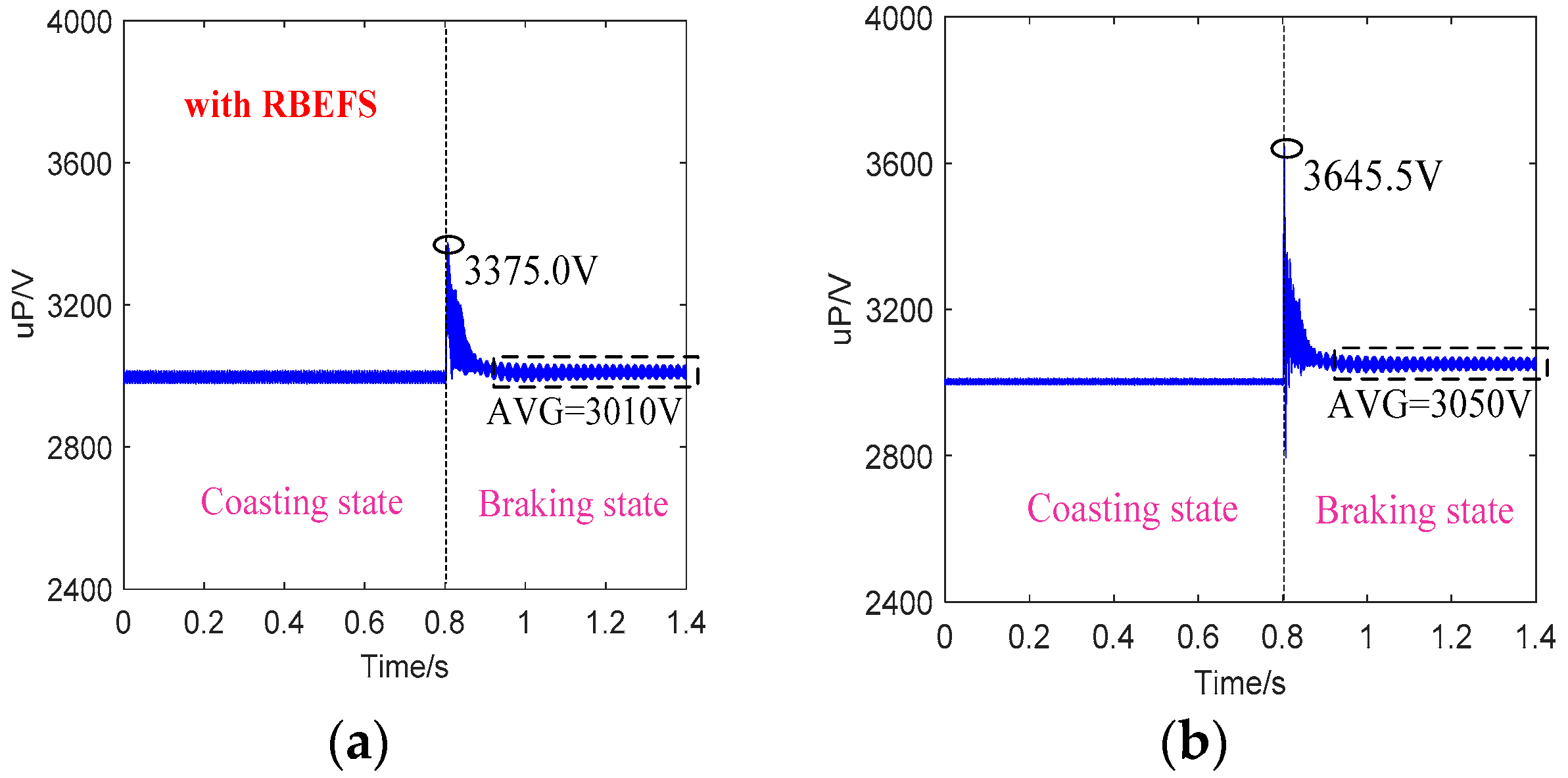
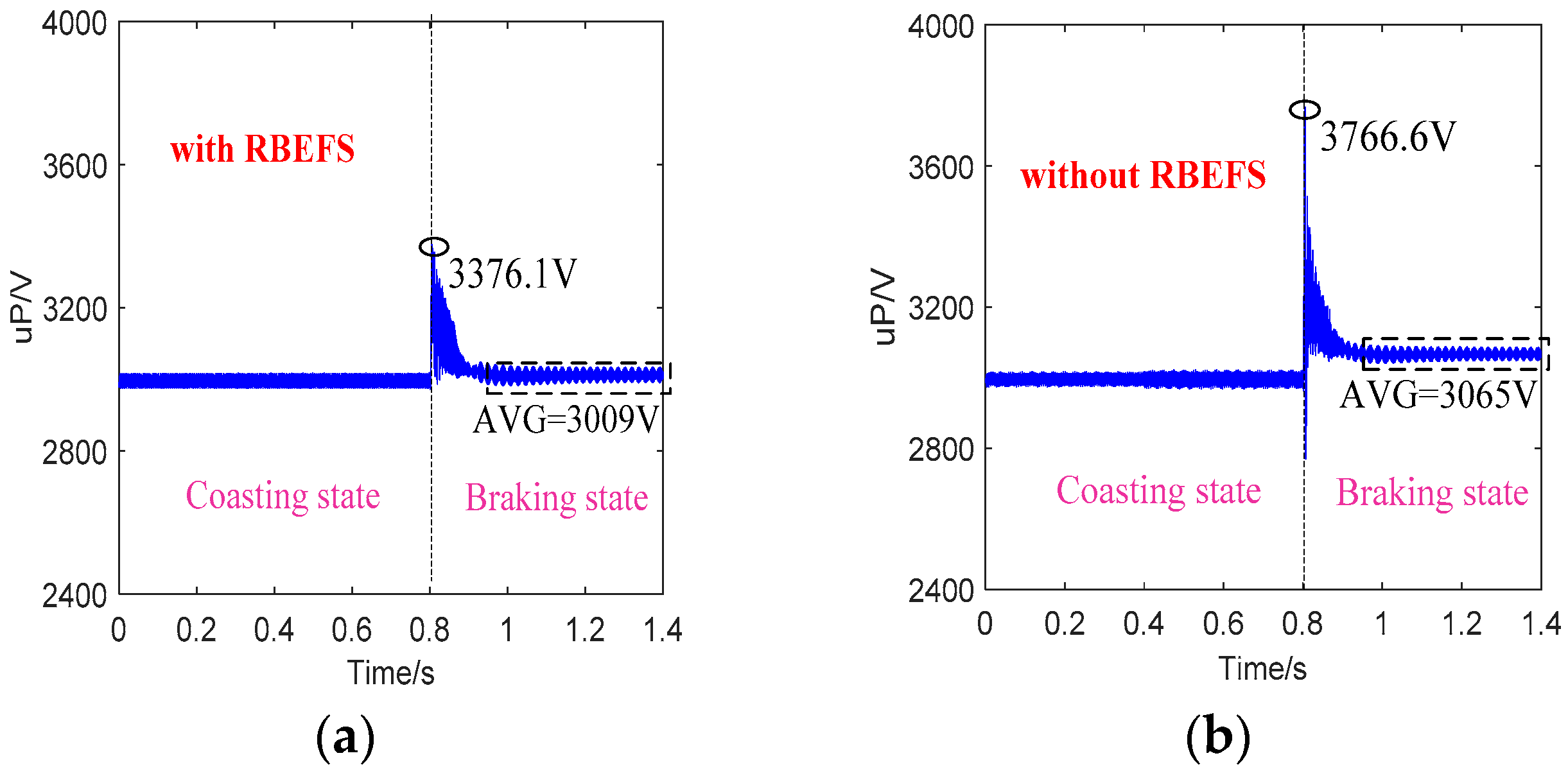
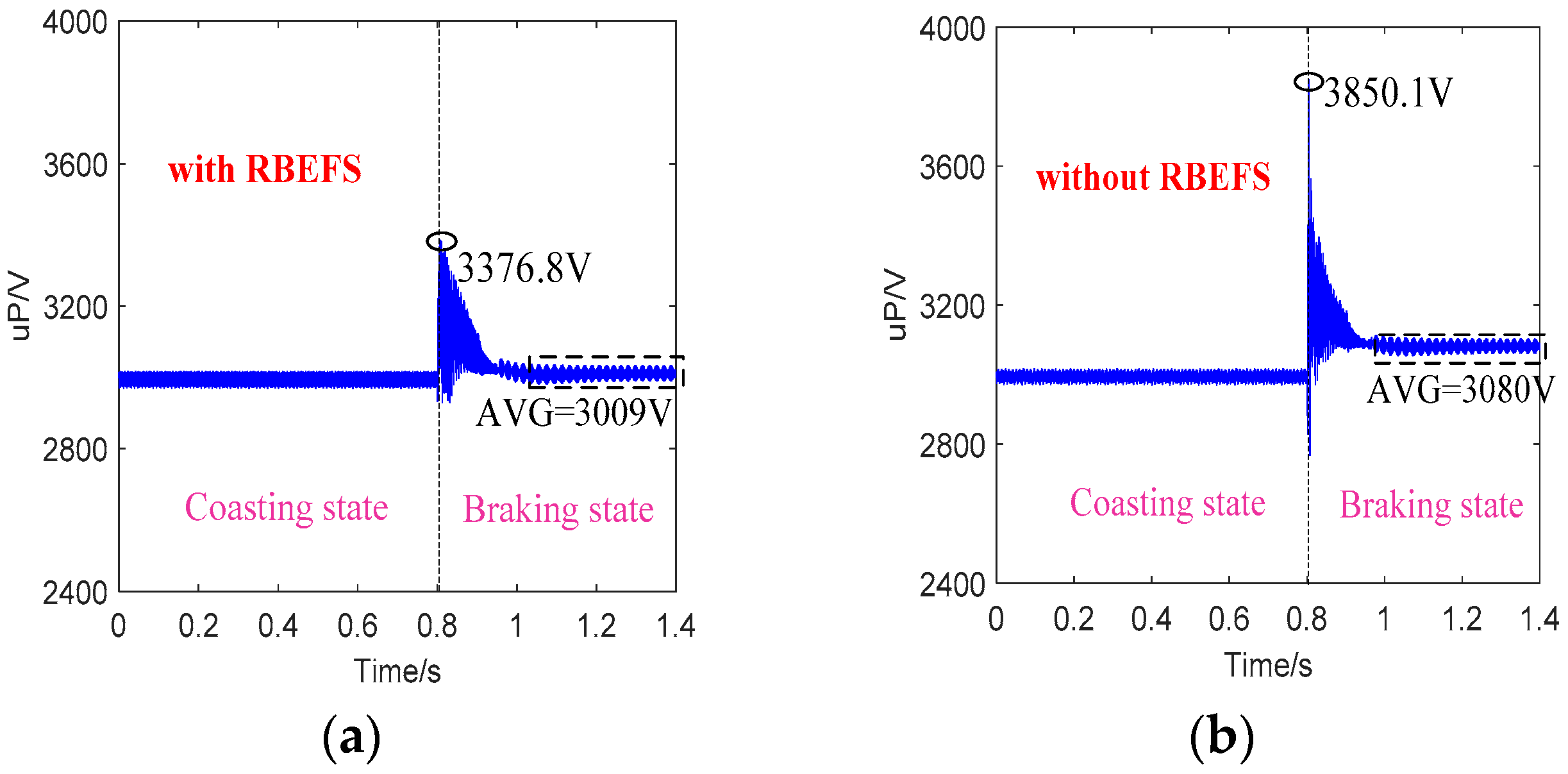
4. Analyses of Positive Rail Voltage Rises under the RBEFS Influence
4.1. Multiple Cases of Single-Train Operation
4.1.1. Different MT Speeds
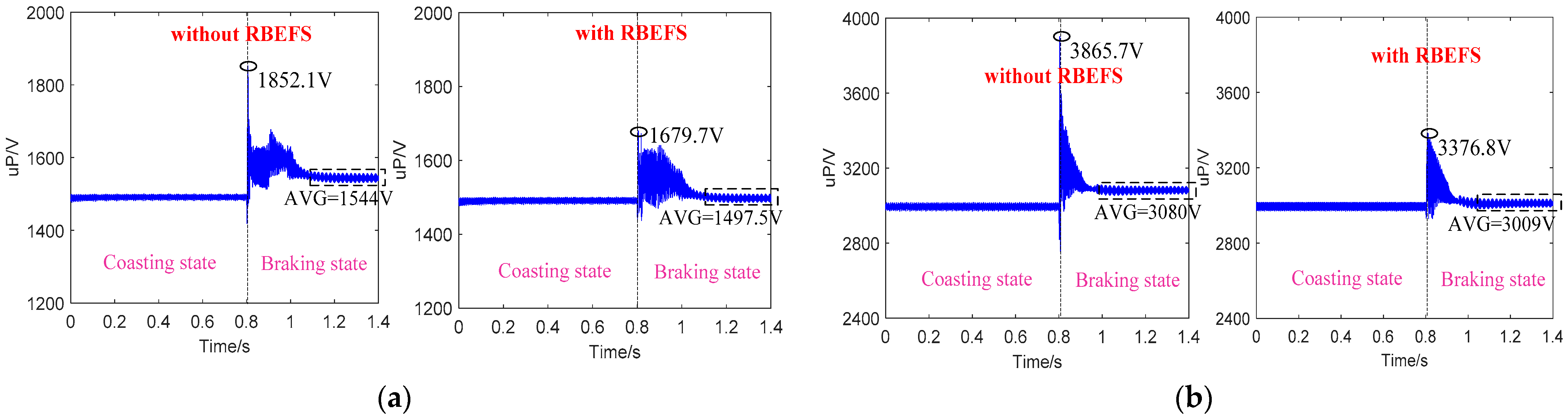
4.1.2. Supply Voltage Levels
4.2. Analyses of Multiple-Train Simultaneous Operation in Same Power Supply Section
4.2.1. Case 1
4.2.2. Case 2
4.2.3. Case 3
5. Conclusions
- (1)
- The higher MT speed and steeper downhill slope lead to the larger RB power and higher PR voltage rise, but the influence of the downhill slope gradient is relatively insignificant compared to that of the speed. The voltage flow direction along the line is different before and after RB. Higher traction grid impedance from the substation to the MT results in a higher instantaneous PR voltage rise and a lower stable PR voltage during RB. A higher traction voltage leads to a higher voltage rise.
- (2)
- The inhibition percentage of the RBEFS is positively related to the PR voltage rise. Therefore, since the increases in MT speed and traction voltage lead to the higher voltage rise, the voltage rise inhibition percentage keeps increasing with the MT speed and the traction voltage level both for the maximum value and the stable AVG amplitude during RB.
- (3)
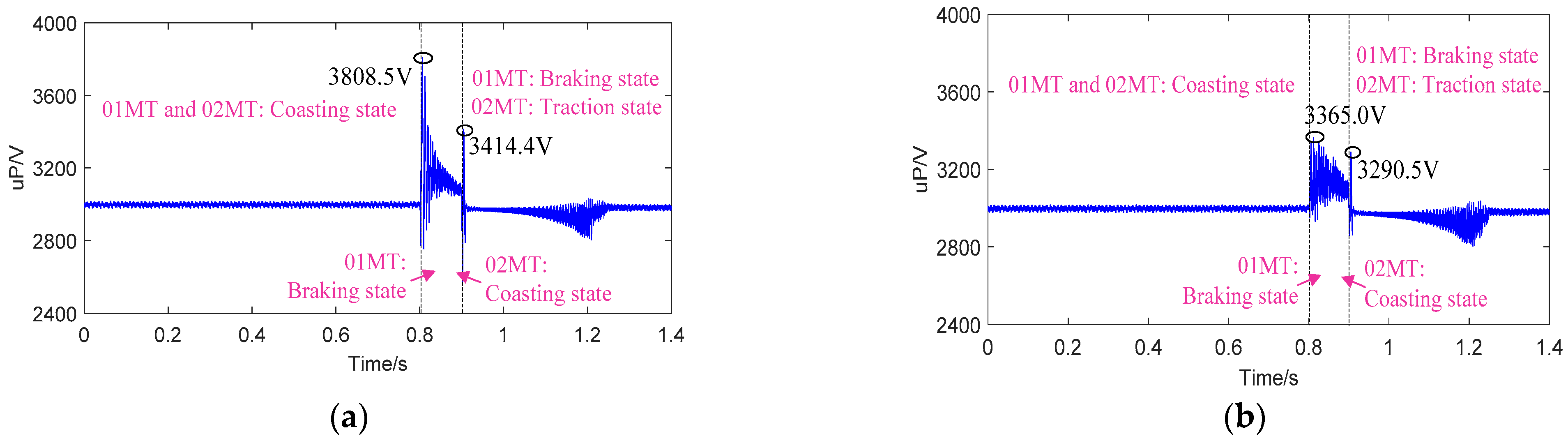
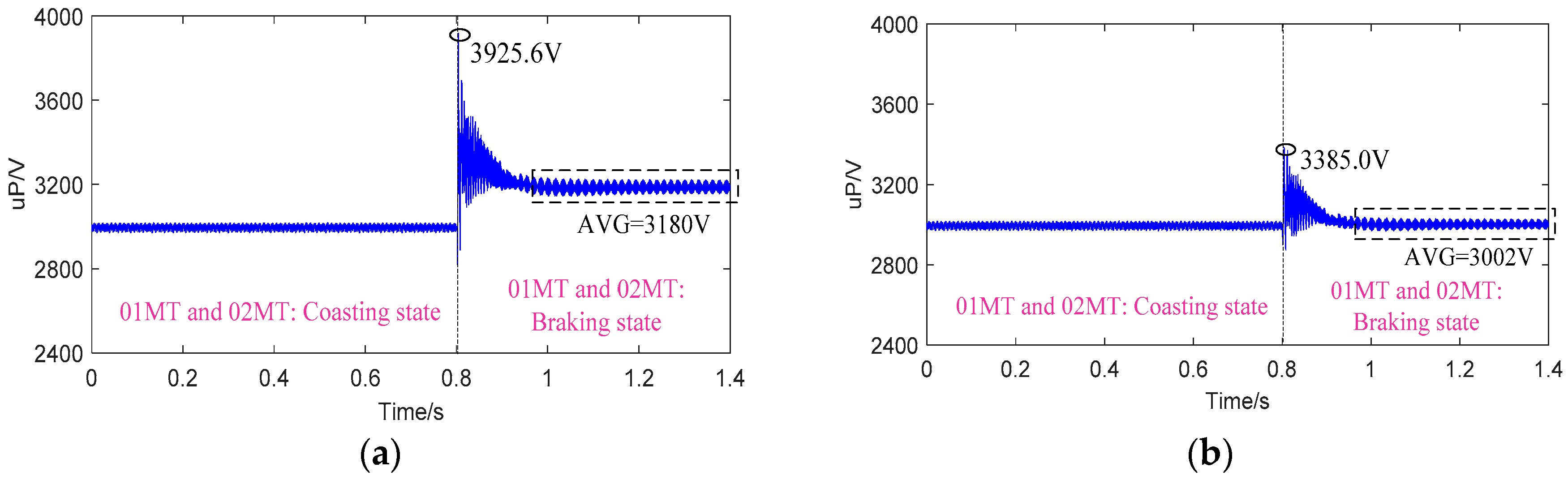
- The offset for the PR voltage rise is very significant when two running trains on the same power supply section simultaneously enter the opposite state (traction state vs RB state). However, the offset amplitudes are notably lower when the offset moments of the two MTs are inconsistent by even only 0.1 s. The superimposed over-voltage effect is very significant when the other MT begins RB at the same time.
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lu, Q.; He, B.; Wu, M.; Zhang, Z.; Luo, J.; Zhang, Y.; He, R.; Wang, K. Establishment and analysis of energy consumption model of heavy-haul train on large long slope. Energies 2018, 11, 965. [Google Scholar] [CrossRef]
- Oliveira, R.; Mattos, L.S.; Ferreira, A.C.; Stephan, R.M. Regenerative braking of a linear induction motor used for the traction of a MagLev vehicle. In Proceedings of the Brazilian Power Electronics Conference, Gramado, Brazil, 27–31 October 2013; pp. 950–956. [Google Scholar]
- Demirci, I.E.; Celikoglu, H.B. Timetable optimization for utilization of regenerative braking energy: A single line case over Istanbul metro network. In Proceedings of the 21st International Conference on Intelligent Transportation Systems, Maui, HI, USA, 4–7 November 2018; pp. 2309–2314. [Google Scholar]
- Yildiz, A.; Arikan, O.; Keskin, K. Traction energy optimization considering comfort parameter: A case study in istanbul metro line. Electr. Power Syst. Res. 2023, 218, 4115–4130. [Google Scholar] [CrossRef]
- Hoo, D.S.; Chua, K.H.; Hau, L.C.; Chong, K.Y.; Lim, Y.S.; Chua, X.R.; Wang, L. An Investigation on recuperation of regenerative braking energy in DC railway electrification system. In Proceedings of the IEEE International Conference in Power Engineering Application, Shah Alam, Malaysia, 7–8 March 2022; pp. 1–6. [Google Scholar]
- Shiri, A.; Shoulaie, A.; Lesani, H. Design optimization and analysis of single-sided linear induction motor, considering all phenomena. IEEE Trans. Energy Convers. 2012, 27, 516–525. [Google Scholar] [CrossRef]
- Jefimowski, W.; Szelag, A. The multi-criteria optimization method for implementation of a regenerative inverter in a 3 kV DC traction system. Electr. Power Syst. Res. 2018, 161, 61–73. [Google Scholar] [CrossRef]
- Panda, N.K.; Poikilidis, M.; Nguyen, P.H. Cost-effective upgrade of the dutch traction power network: Moving to Bi-directional and controllable 3 kV DC substations for improved performance. IET Electr. Syst. Transp. 2023, 13, 1–13. [Google Scholar] [CrossRef]
- Menicanti, S.; Benedetto, M.D.; Lidozzi, A.; Solero, L.; Crescimbini, F. Recovery of train braking energy in 3 kV DC railway systems: A case of study. In Proceedings of the International Symposium on Power Electronics, Electrical Drives, Automation and Motion, Sorrento, Italy, 24–26 June 2020; pp. 1–6. [Google Scholar]
- Jefimowski, W.; Drarzek, Z. Distributed module-based power supply enhancement system for 3 kV DC traction. Energies 2023, 16, 401. [Google Scholar] [CrossRef]
- An, B.; Liu, S.; Liu, S. Simulation of ground rheostatic braking in mid-to-low speed maglev train. In Proceedings of the Chinese Control and Decision Conference, Changsha, China, 31 May 2014; pp. 4702–4706. [Google Scholar]
- Rigaut, T.; Carpentier, P.; Chancelier, J.P.; De Lara, M.; Waeytens, J. Stochastic Optimization of braking energy storage and ventilation in a subway station. IEEE Trans. Power Syst. 2019, 34, 1256–1263. [Google Scholar] [CrossRef]
- Ceraolo, M.; Lutzemberger, G.; Meli, E.; Pugi, L.; Rindi, A.; Pancari, G. Energy storage systems to exploit regenerative braking in DC railway systems: Different approaches to improve efficiency of modern high-speed trains. J. Energy Storage 2018, 16, 269–279. [Google Scholar] [CrossRef]
- Ghaviha, N.; Campillo, J.; Bohlin, M.; Dahlquist, E. Review of application of energy storage devices in railway transportation. Energy Procedia 2017, 105, 4561–4568. [Google Scholar] [CrossRef]
- Mayrink, S.; Oliveira, J.G.; Dias, B.H.; Oliveira, L.W.; Ochoa, J.S.; Rosseti, G.S. Regenerative braking for energy recovering in diesel-electric freight trains: A technical and economic evaluation. Energies 2020, 13, 963. [Google Scholar] [CrossRef]
- Khodaparastan, M. Recuperation of Regenerative Braking Energy in Electric Rail Transit Systems. Ph.D. Thesis, The City College of New York, New York, NY, USA, 2020. [Google Scholar]
- Almaksour, K.; Caron, H.; Kouassi, N.; Letrouvé, T.; Navarro, N.; Saudemont, C.; Robyns, B. Mutual impact of train regenerative braking and inverter based reversible DC railway substation. In Proceedings of the 21st European Conference on Power Electronics and Applications, Genova, Italy, 3–5 September 2019; pp. P.1–P.9. [Google Scholar]
- Lin, S.; Huang, D.; Wang, A.; Huang, Y.; Zhao, L.; Luo, R.; Lu, G. Research on the regeneration braking energy feedback system of urban rail transit. IEEE Trans. Veh. Technol. 2019, 68, 7329–7339. [Google Scholar] [CrossRef]
- Steiner, M.; Klohr, M.; Pagiela, S. Energy storage system with ultracaps on board of railway vehicles. In Proceedings of the European Conference on Power Electronics and Applications, Aalborg, Denmark, 4 January 2007; pp. 1–10. [Google Scholar]
- Zhang, Q.; Zhang, Y.; Huang, K.; Tasiu, I.A.; Lu, B.; Meng, X.; Liu, Z.; Sun, W. Modeling of regenerative braking energy for electric multiple units passing long downhill section. IEEE Trans. Transp. Electrif. 2022, 8, 3742–3758. [Google Scholar] [CrossRef]
- Rufer, A.; Hotellier, D.; Barrade, P. A supercapacitor-based energy storage substation for voltage compensation in weak transportation networks. IEEE Trans. Power Deliv. 2004, 19, 629–636. [Google Scholar] [CrossRef]
- Suárez, M.A.; González, J.W.; Celis, I. Transient overvoltages in a railway system during braking. In Proceedings of the IEEE/PES Transmission and Distribution Conference and Exposition: Latin America, Sao Paulo, Brazil, 8–10 November 2010; pp. 204–211. [Google Scholar]
- Ebrahimian, A.; Dastfan, A.; Ahmadi, S. Metro train line voltage control: Using average modeling bidirectional DC-DC converter. In Proceedings of the 9th Annual Power Electronics, Drives Systems and Technologies Conference, Tehran, Iran, 13–15 February 2018; pp. 7–13. [Google Scholar]
- Li, Y.; Zhang, H.; Bu, L.; Liu, W.; Zhang, J.; Wu, T. Discussion of the energy-saving effect of inverter feedback devices from energy consumption of traveling trains. J. Railw. Sci. Eng. 2020, 17, 2381–2386. [Google Scholar]
- Zhou, Y.; Wu, S.; Wei, J.; Kong, Q. Analysis of energy feed system of metro under adaptive moment of inertia VSG control. In Proceedings of the 15th IEEE Conference on Industrial Electronics and Applications, Kristiansand, Norway, 9–13 November 2020; pp. 726–731. [Google Scholar]
- Li, S.; Wu, S.; Xiang, S.; Zhang, Y.; Guerrero, J.M.; Vasquez, J.C. Research on synchronverter-based regenerative braking energy feedback system of urban rail transit. Energies 2020, 13, 4418. [Google Scholar] [CrossRef]
- Krim, Y.; Almaksour, K.; Caron, H.; Letrouvé, T.; Saudemont, C.; Francois, B.; Robyns, B. Comparative study of two control techniques of regenerative braking power recovering inverter based DC railway substation. In Proceedings of the 22nd European Conference on Power Electronics and Applications, Lyon, France, 7–11 September 2020; pp. 1–9. [Google Scholar]
- Liang, H.; Li, P. The supercapacitor energy storage system is applied to Shanghai medium-low speed maglev train test line. In Proceedings of the International Conference on Sensing, Measurement & Data Analytics in the era of Artificial Intelligence, Nanjing, China, 21–23 October 2021; pp. 1–6. [Google Scholar]
- Huang, K.; Lin, G.; Liu, Z. Prediction approach of negative rail potentials and stray currents in medium-low-speed maglev. IEEE Trans. Transp. Electrif. 2022, 8, 3801–3815. [Google Scholar] [CrossRef]
- Xu, J.; Chen, C.; Sun, Y.; Rong, L.; Lin, G. Nonlinear dynamic characteristic modeling and adaptive control of low speed maglev train. Int. J. Appl. Electromagn. Mech. 2020, 62, 73–92. [Google Scholar] [CrossRef]
- Isfahani, A.H.; Ebrahimi, B.M.; Lesani, H. Design optimization of a low-speed single-sided linear induction motor for improved efficiency and power factor. IEEE Trans. Magn. 2008, 44, 266–272. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| i‰ | v0/(rad/s) | i‰ | v0/(rad/s) | i‰ | v0/(rad/s) |
|---|---|---|---|---|---|
| −20‰ | 138.3162 | −22‰ | 138.6897 | −24‰ | 139.0642 |
| −26‰ | 139.3284 | −28‰ | 139.5931 | −30‰ | 139.8583 |
| −32‰ | 140.1240 | −34‰ | 140.4603 | −36‰ | 140.8395 |
| v (km/h) | With the RBEFS | Without the RBEFS | Inhibition Percentage | |
|---|---|---|---|---|
| Maximum amplitude | 80 | 12.62% | 19.86% | 7.24% |
| 120 | 12.61% | 21.64% | 9.03% | |
| 160 | 12.65% | 25.68% | 13.03% | |
| 200 | 12.67% | 28.47% | 15.80% | |
| Stable AVG amplitude | 80 | 0.37% | 1.37% | 1.00% |
| 120 | 0.43% | 1.77% | 1.34% | |
| 160 | 0.40% | 2.27% | 1.87% | |
| 200 | 0.40% | 2.77% | 2.37% |
| U (kV) | With the RBEFS | Without the RBEFS | Inhibition Percentage | |
|---|---|---|---|---|
| Maximum amplitude | 1.5 | 12.43% | 23.97% | 11.54% |
| 3 | 12.67% | 28.99% | 16.32% | |
| Stable AVG amplitude | 1.5 | 0.23% | 3.35% | 3.12% |
| 3 | 0.40% | 2.77% | 2.37% |
| With the RBEFS | Without the RBEFS | Inhibition Percentage | |
|---|---|---|---|
| 0.8 s | 12.28% | 27.08% | 14.8% |
| 0.9 s | 9.79% | 13.93% | 4.14% |
| With the RBEFS | Without the RBEFS | Inhibition Percentage | |
|---|---|---|---|
| 0.8 s | 12.95% | 30.98% | 18.03% |
| 0.9 s | 0.17% | 6.11% | 5.94% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, K. Positive Rail Voltage Rise Behavior and Inhibition Analysis of Regenerative Braking of Medium–Low-Speed Maglev Train. Energies 2024, 17, 1782. https://doi.org/10.3390/en17071782
Huang K. Positive Rail Voltage Rise Behavior and Inhibition Analysis of Regenerative Braking of Medium–Low-Speed Maglev Train. Energies. 2024; 17(7):1782. https://doi.org/10.3390/en17071782
Chicago/Turabian StyleHuang, Ke. 2024. "Positive Rail Voltage Rise Behavior and Inhibition Analysis of Regenerative Braking of Medium–Low-Speed Maglev Train" Energies 17, no. 7: 1782. https://doi.org/10.3390/en17071782
APA StyleHuang, K. (2024). Positive Rail Voltage Rise Behavior and Inhibition Analysis of Regenerative Braking of Medium–Low-Speed Maglev Train. Energies, 17(7), 1782. https://doi.org/10.3390/en17071782