

A Robust Switching Control Strategy for Three-Phase Voltage Source Converters with Uncertain Circuit Parameters


Abstract
:1. Introduction
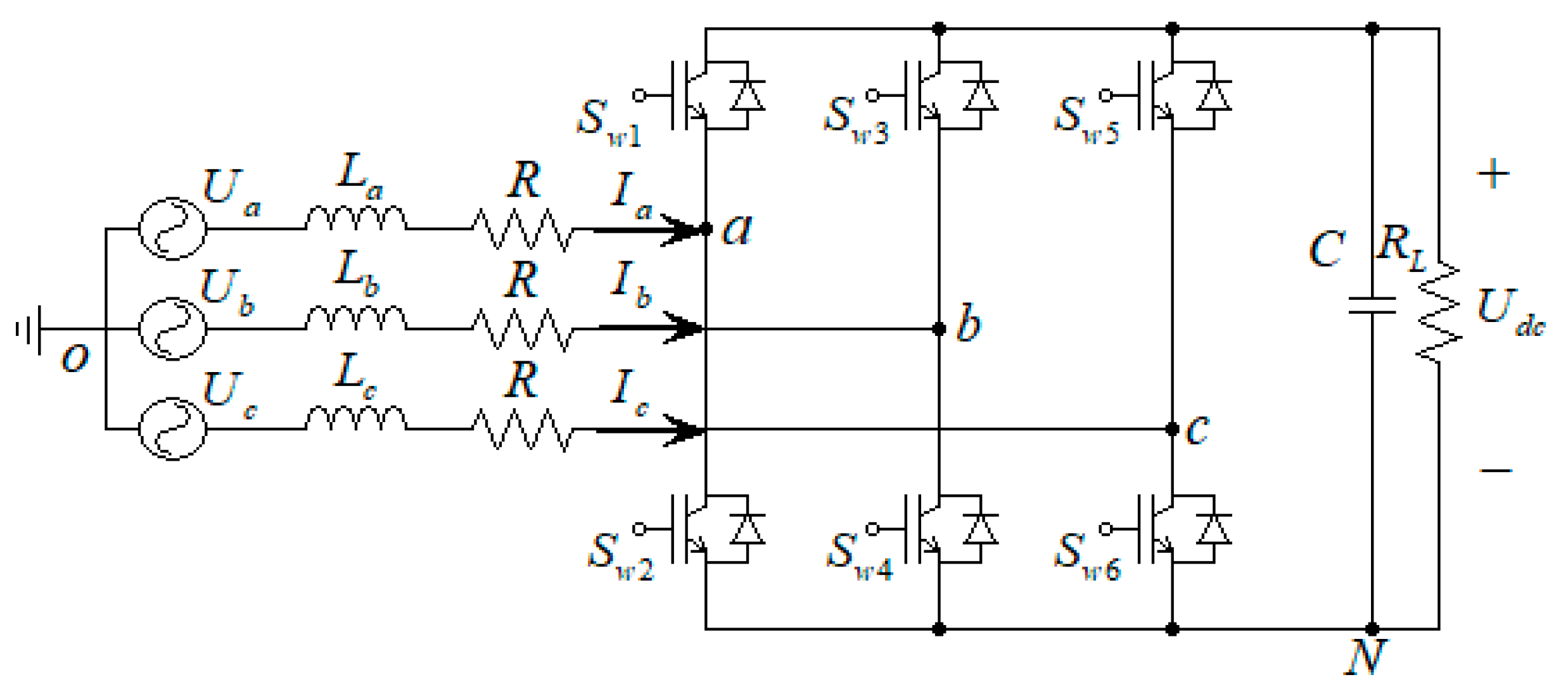
2. Power Switching Affine Model
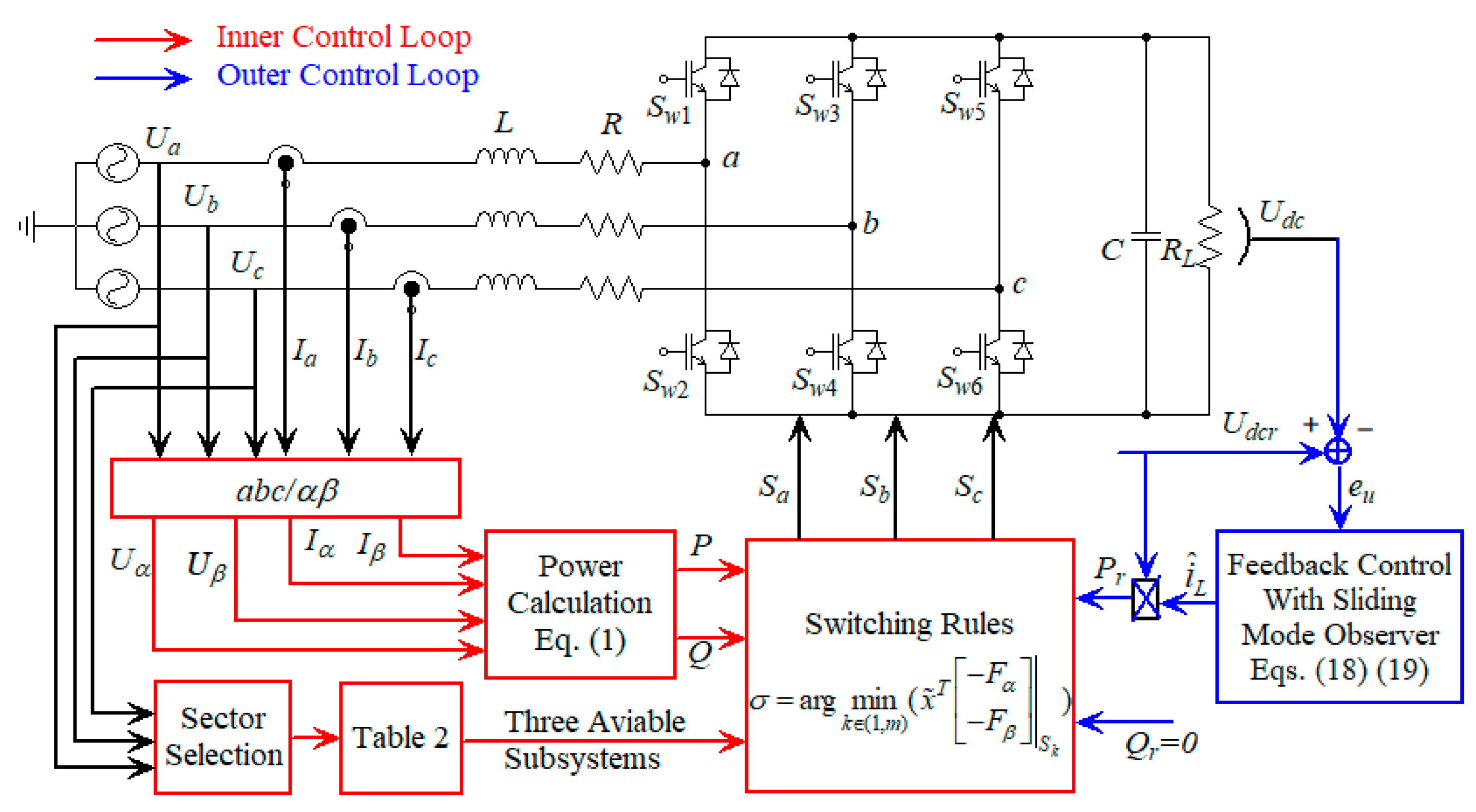
3. Proposed Controllers Design
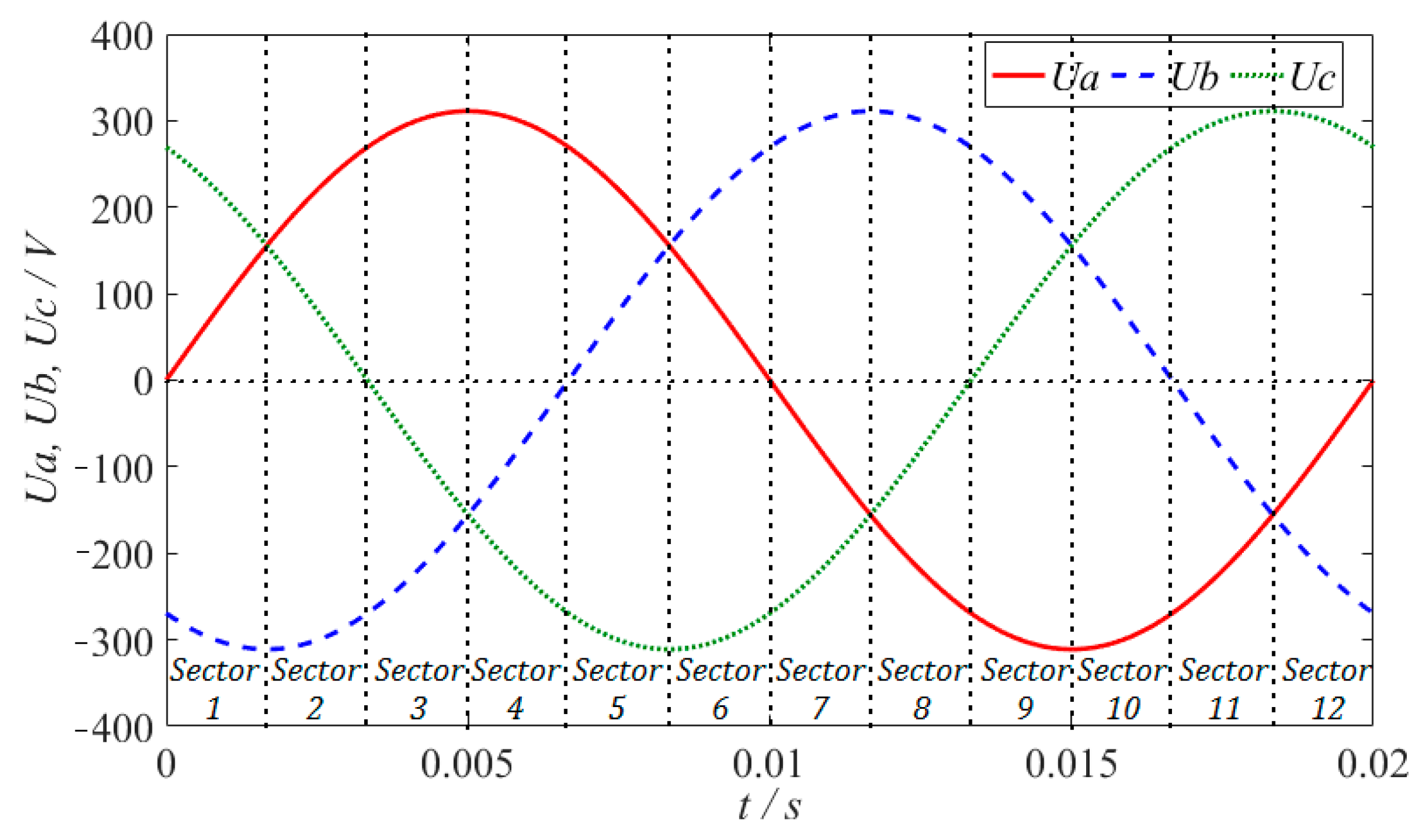
3.1. Inner Loop Switching Controller
3.2. Outer Loop Feedback Linearization Controller with Sliding Mode Observer
4. Simulation and Experimental Results
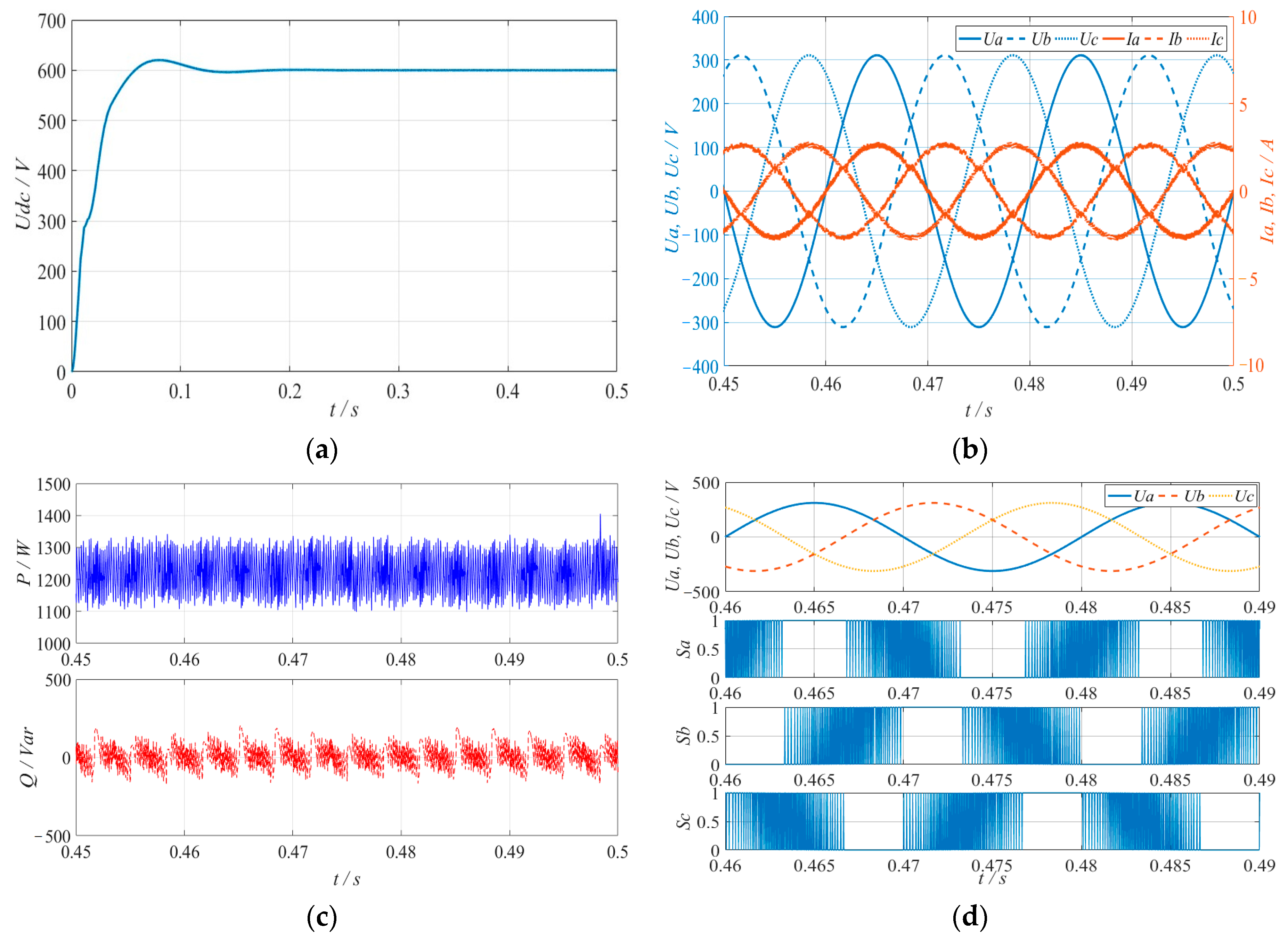
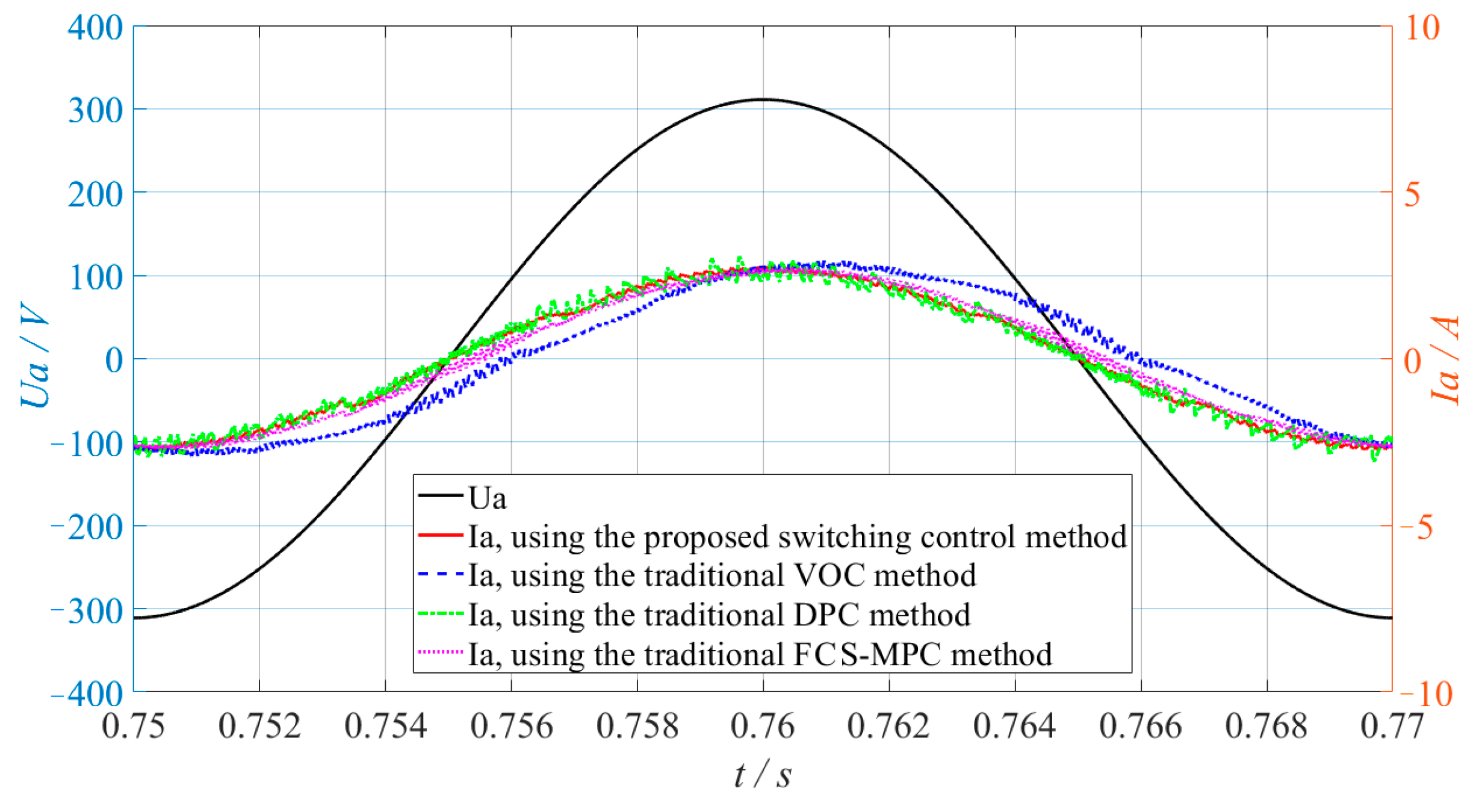
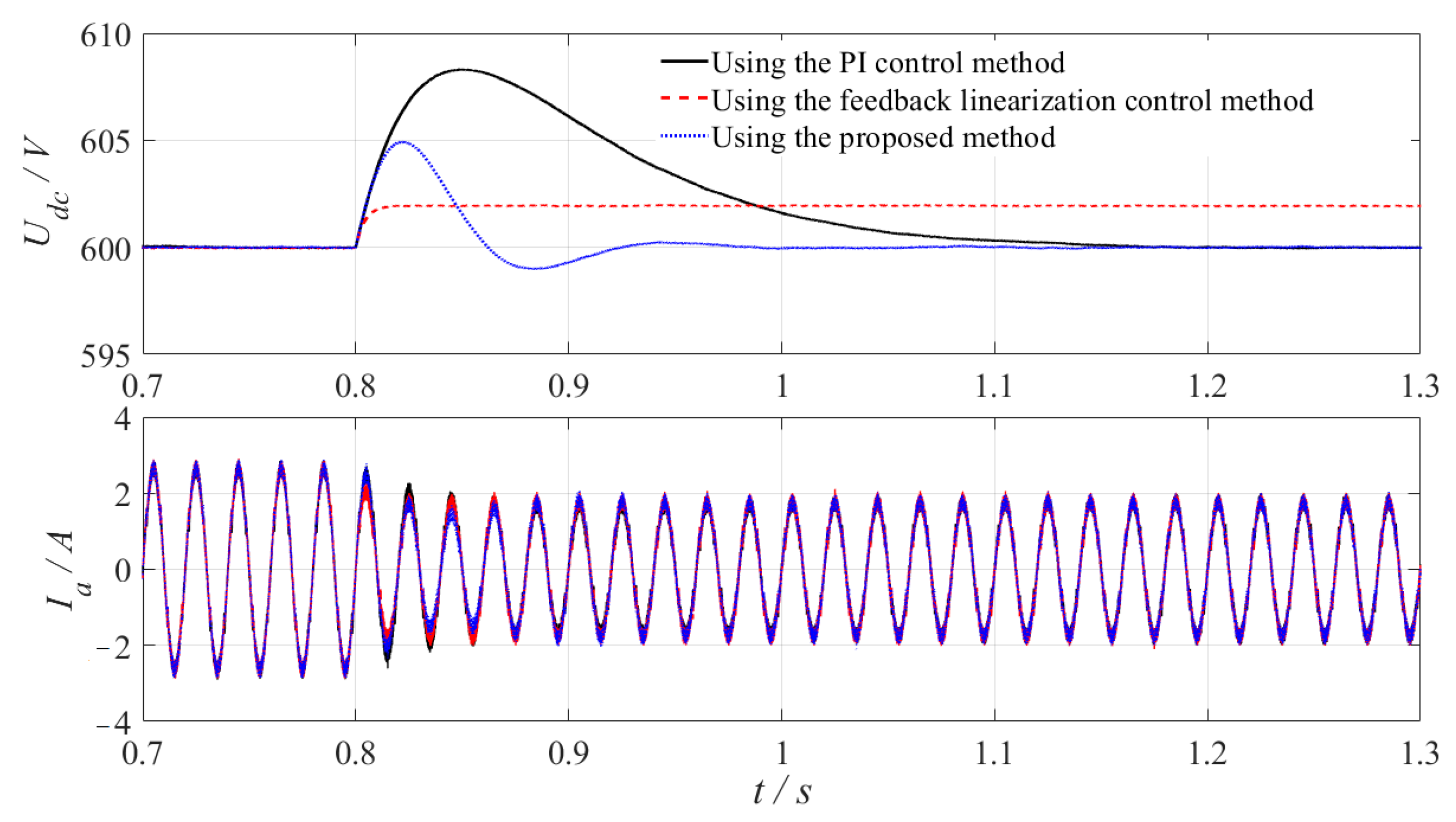
4.1. Simulation Results
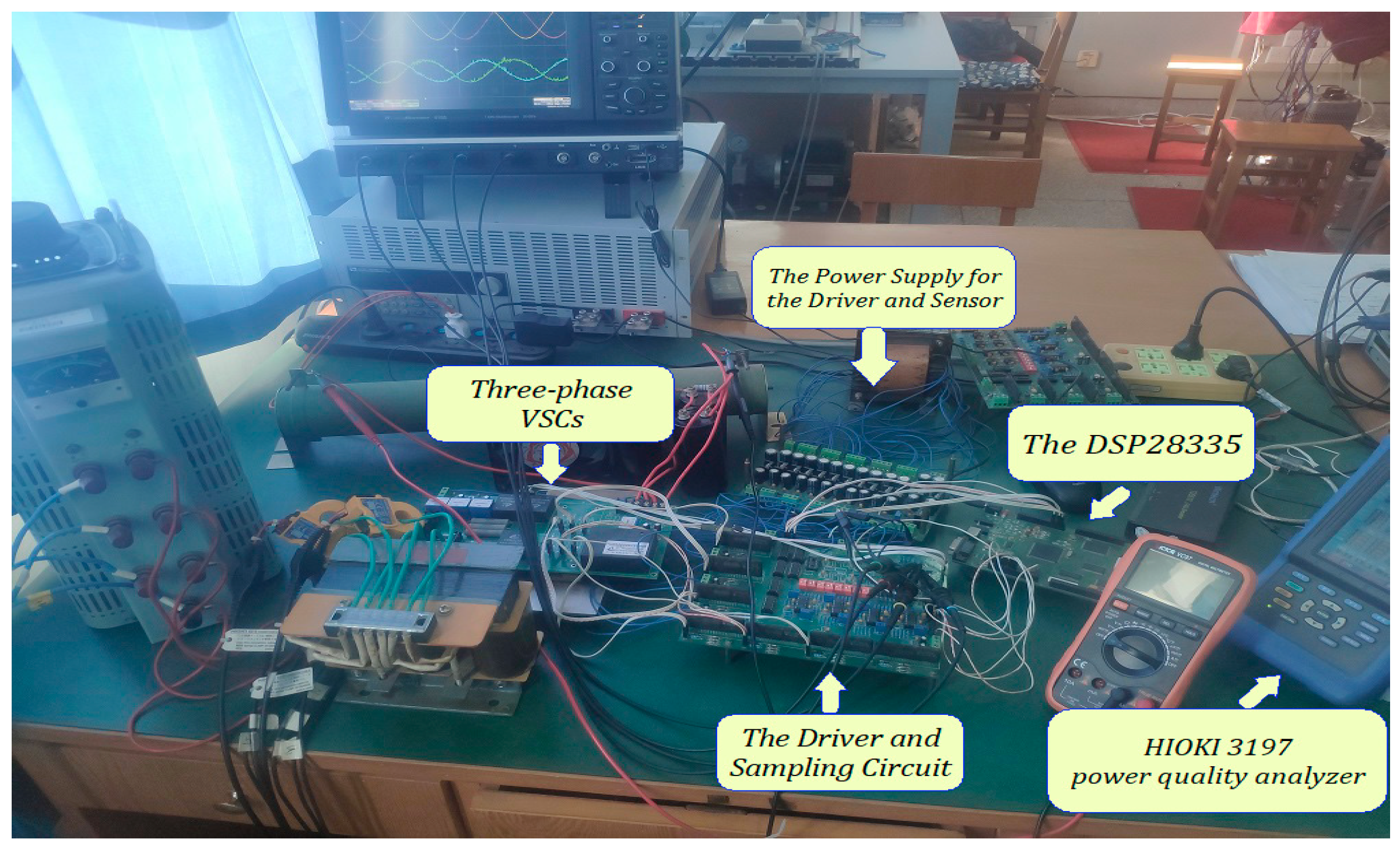
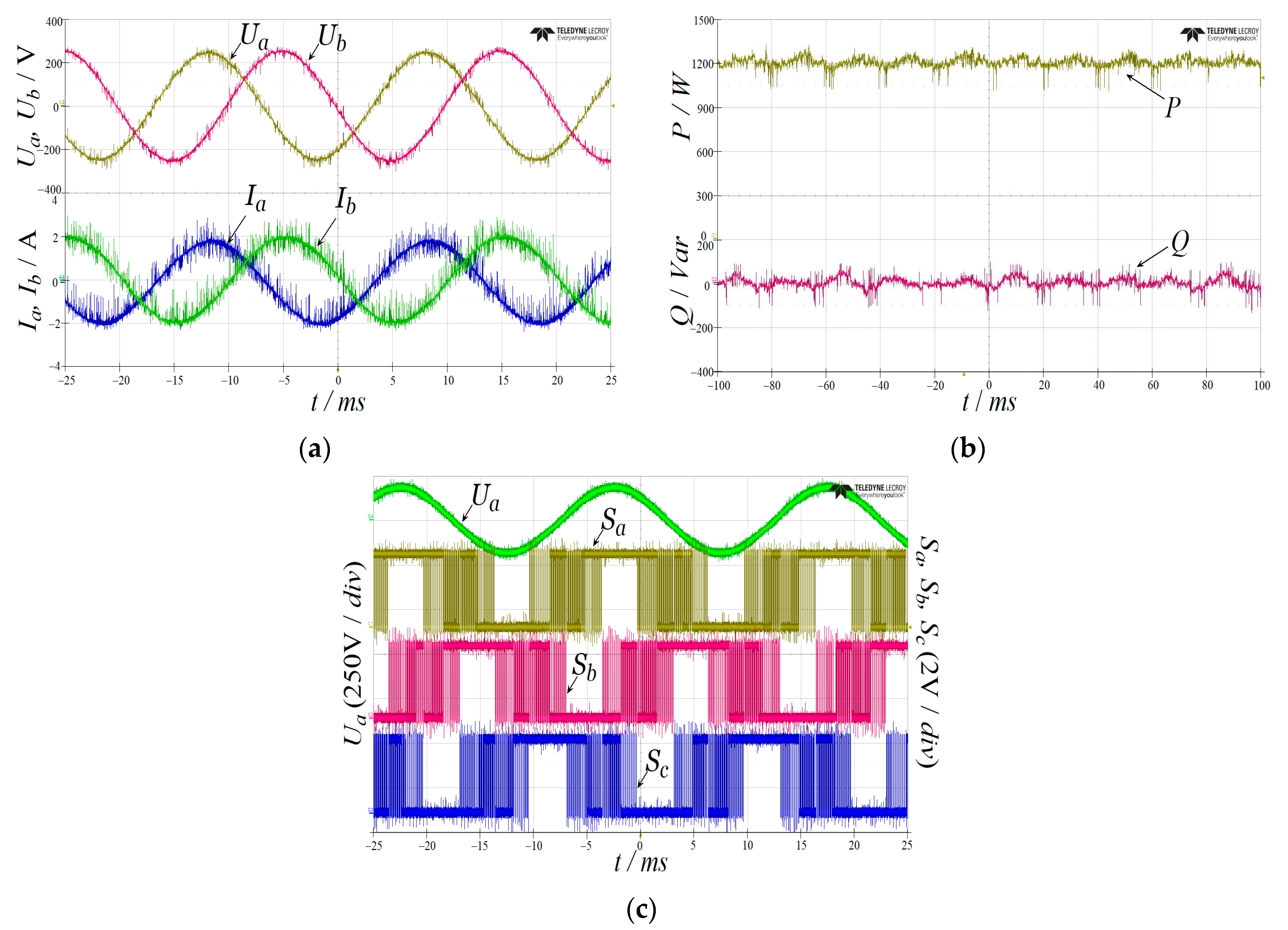
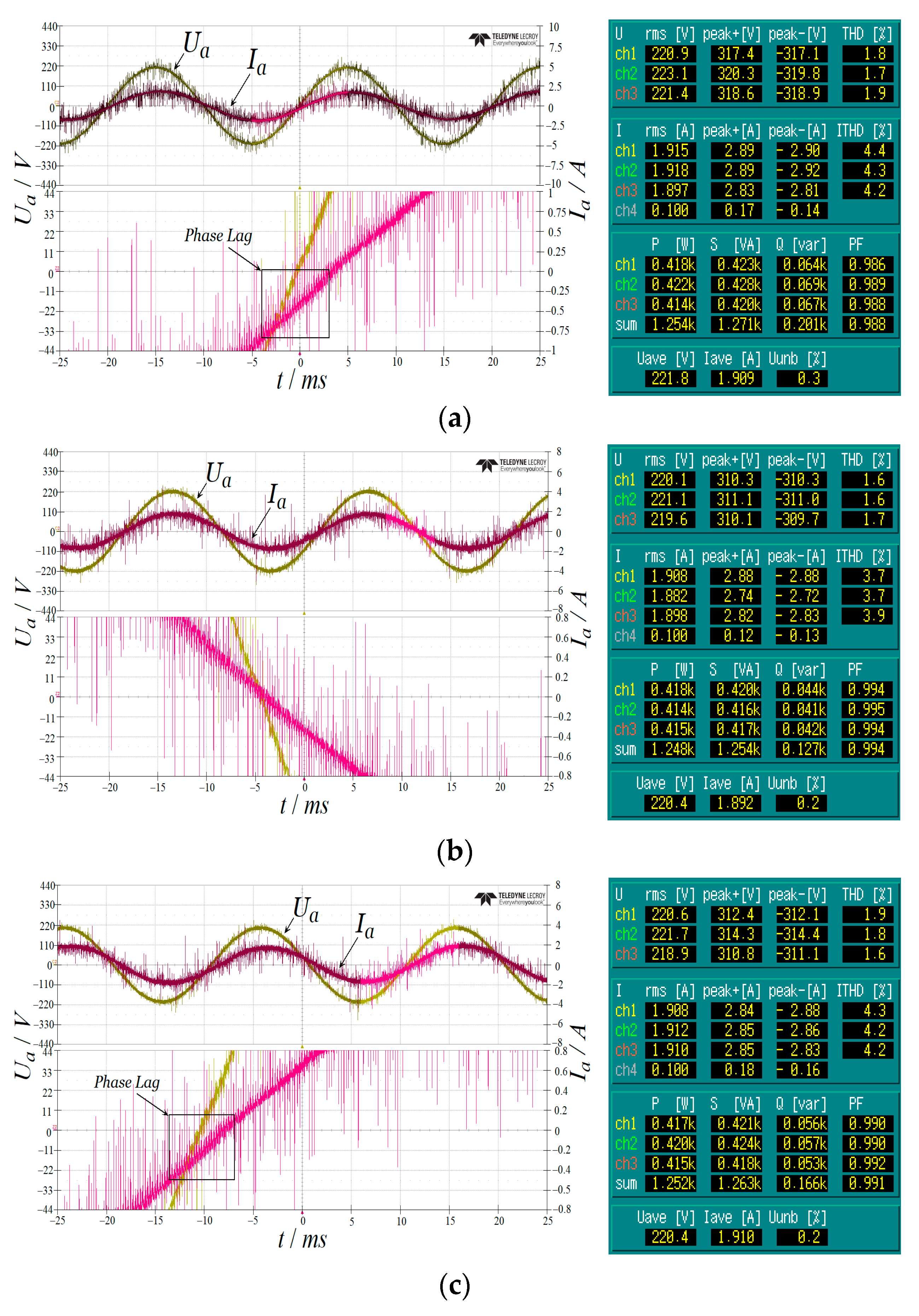
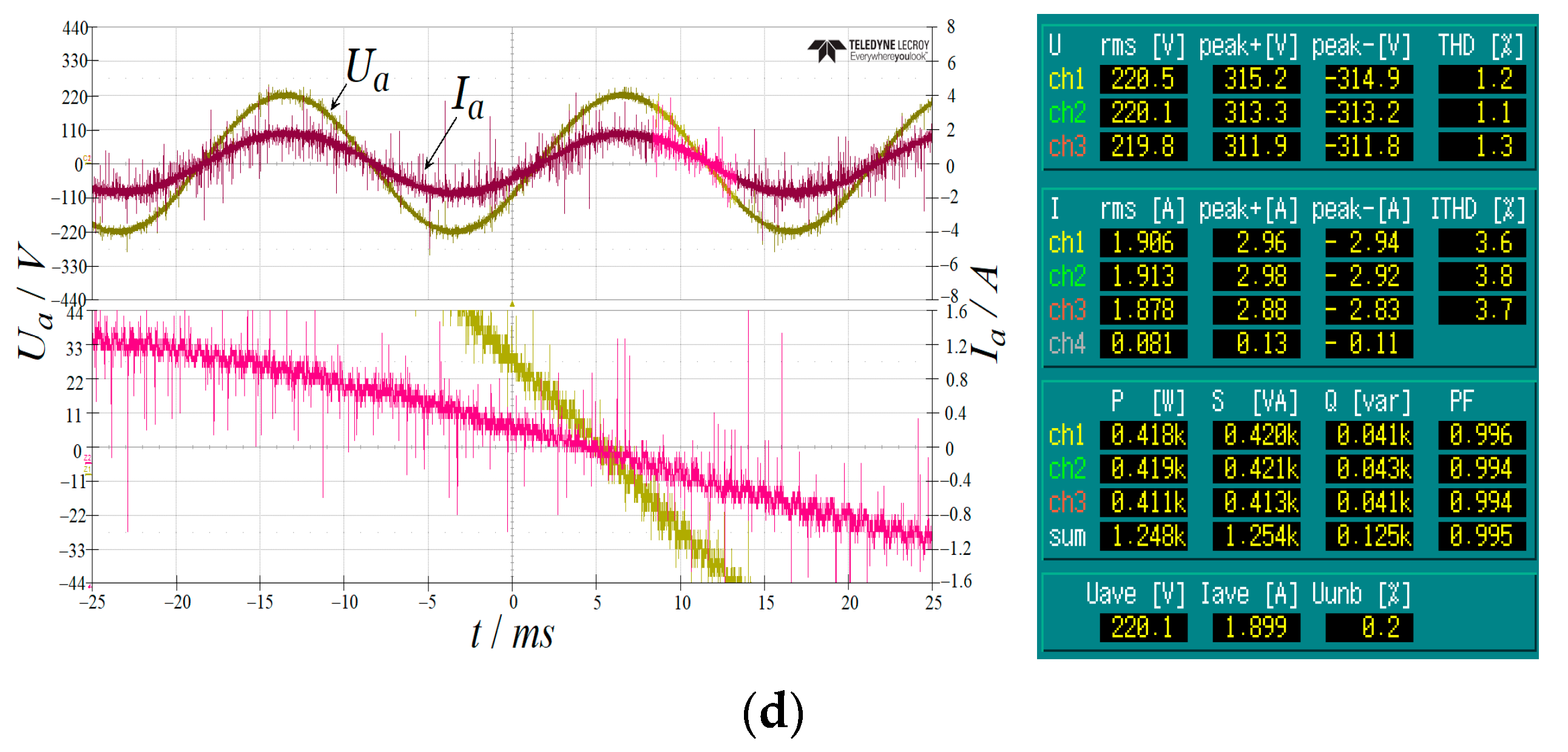
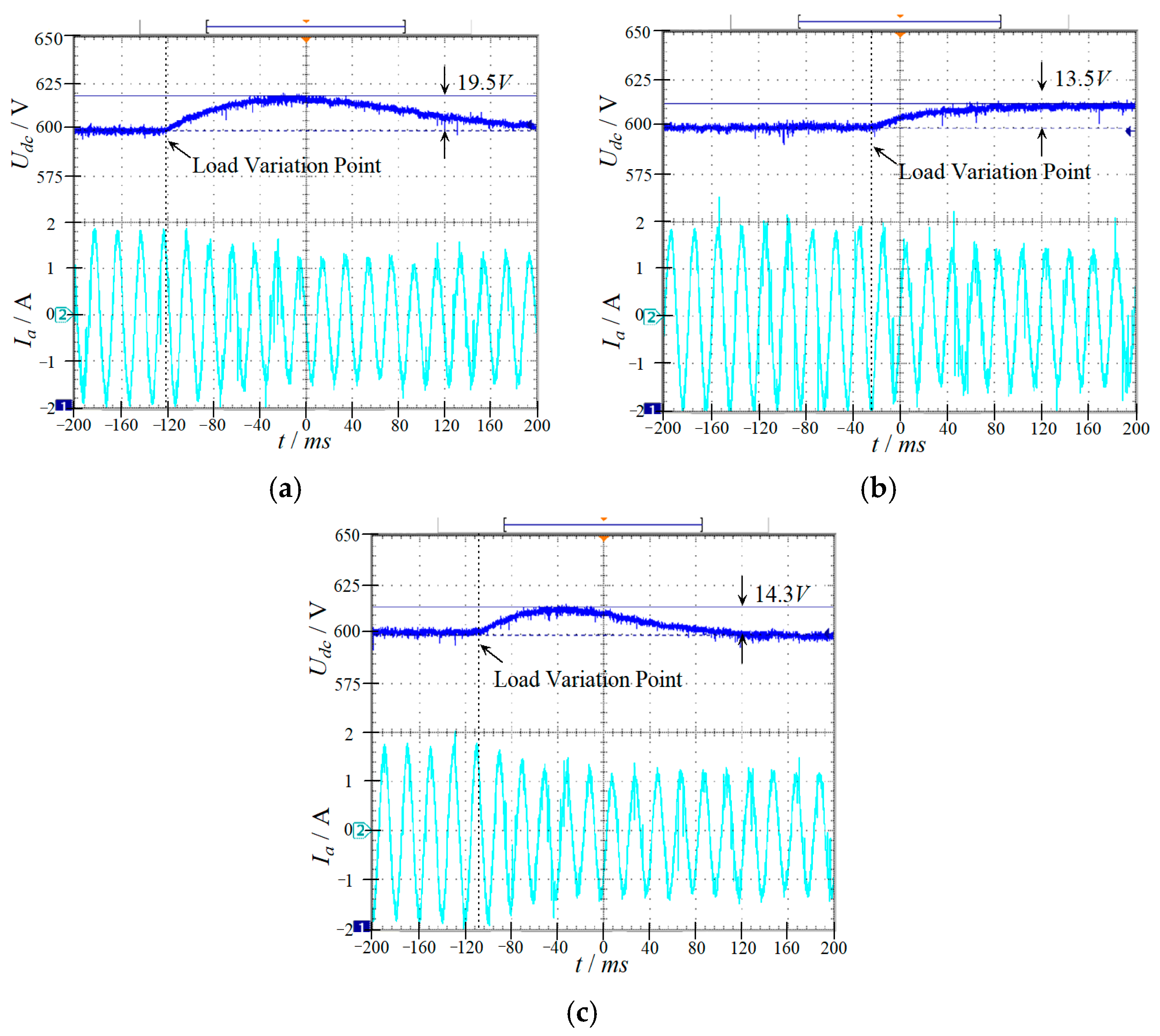
4.2. Experimental Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chandwani, A.; Mallik, A. A reduced stage configuration of three-phase isolated AC/DC converter for auxiliary power units. IEEE Trans. Veh. Technol. 2022, 71, 3687–3703. [Google Scholar] [CrossRef]
- Ma, K.; Wang, J.S.; Cai, X.; Blaabjerg, F. AC grid emulations for advanced testing of grid-connected converters—An overview. IEEE Trans. Power Electr. 2021, 36, 1626–1645. [Google Scholar] [CrossRef]
- Chen, H.; Xu, D.G.; Deng, X. Control for power converter of small-scale switched reluctance wind power generator. IEEE Trans. Ind. Electron. 2021, 68, 3148–3158. [Google Scholar] [CrossRef]
- Wang, P.; Chen, X.Z.; Tong, C.N.; Jia, P.Y.; Wen, C.X. Large- and small-signal average-value modeling of dual active-bridge DC-DC converter with triple-phase-shift control. IEEE Trans. Power Electron. 2021, 36, 9237–9250. [Google Scholar] [CrossRef]
- Yue, X.L.; Wang, X.F.; Blaabjerg, F. Review of small-signal modeling methods including frequency-coupling dynamics of power converters. IEEE Trans. Power Electron. 2019, 34, 3313–3328. [Google Scholar] [CrossRef]
- Liao, Y.C.; Wang, X.F. Small-signal modeling of AC power electronic systems: Critical review and unified modeling. IEEE Open J. Power Electron. 2021, 2, 424–439. [Google Scholar] [CrossRef]
- Guo, X.; Ren, H.P.; Liu, D. An optimized PI controller design for three- phase PFC converter based on multi-objective chaotic particle swarm optimization. J. Power Electron. 2016, 16, 610–620. [Google Scholar] [CrossRef]
- Gui, Y.H.; Kim, C.H.; Chung, C.C.; Guerrero, J.M.; Guan, Y.J.; Vasquez, J.C. Improved direct power control for grid-connected voltage source converters. IEEE Trans. Ind. Electron. 2018, 65, 8041–8051. [Google Scholar] [CrossRef]
- Jeeranantasin, N.; Nungam, S. Sliding mode control of three-phase AC/DC converters using exponential rate reaching law. J. Syst. Eng. Electron. 2022, 33, 210–221. [Google Scholar] [CrossRef]
- Ren, H.P.; Guo, X. Robust adaptive control of a CACZVS three-phase PFC converter for power supply of silicon growth furnace. IEEE Trans. Ind. Electron. 2016, 63, 903–912. [Google Scholar] [CrossRef]
- Hasanien, H.M.; Matar, M. A fuzzy logic controller for autonomous operation of a voltage source converter-based distributed generation system. IEEE Trans. Smart Grid 2015, 6, 158–165. [Google Scholar] [CrossRef]
- Hou, L.M.; Ma, J.H.; Wang, W. Sliding mode predictive current control of permanent magnet synchronous motor with cascaded variable rate sliding mode speed controller. IEEE Access 2022, 10, 33992–34002. [Google Scholar] [CrossRef]
- Yin, Y.F.; Liu, J.X.; Luo, W.S.; Wu, L.G.; Vazquez, S.; Leon, J.I.; Franquelo, L.G. Adaptive control for three-phase power converters with disturbance rejection performance. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 674–685. [Google Scholar] [CrossRef]
- Dyhia, K.; Hakim, D.; Lamine, H.M.; Arezki, F.; Nacereddine, B. Comparative study of PI and fuzzy logic controllers for three-phases parallel multi-cell converter. In Proceedings of the International Conference on Control, Automation and Diagnosis, Grenoble, France, 2–4 July 2019. [Google Scholar]
- Shieh, C.S. Quick implementation of pule wise modulation (PWM), pulse frequency modulation (PFM) and mixed PWM/PFM on FPGA chip. In Proceedings of the International Symposium on Computer, Consumer and Control, Taichung City, Taiwan, 13–16 November 2020. [Google Scholar]
- Holmes, D.G.; Lipo, T.A. Pulse Width Modulation for Power Converters: Principles and Practice; Wiley-IEEE Press: Hoboken, NJ, USA, 2003. [Google Scholar]
- Khalilzadeh, M.; Vaez-Zadeh, S.; Rodriguez, J.; Heydari, R. Model-free predictive control of motor drives and power converters: A review. IEEE Access 2020, 9, 105733–105747. [Google Scholar] [CrossRef]
- Zhao, Z.L.; Gong, S.Q.; Yang, Q.G.; Xie, J.D.; Luo, X.; Zhang, J.X.; Ni, Q.; Lai, L.L. An improved FCS-MPC strategy for low-frequency oscillation stabilization of PV-based microgrids. IEEE Trans. Sustain. Energy 2023, 14, 2376–2390. [Google Scholar] [CrossRef]
- Li, X.Y.; Tian, W.; Gao, X.N.; Yang, Q.F.; Kennel, R. A generalized observer-based robust predictive current control strategy for PMSM drive system. IEEE Trans. Ind. Electron. 2022, 69, 1322–1332. [Google Scholar] [CrossRef]
- Guo, X.; Ren, H.P.; Li, J. Robust model predictive control for compound active clamp three-phase soft switching PFC converter under unbalanced grid condition. IEEE Trans. Ind. Electron. 2018, 65, 2156–2166. [Google Scholar] [CrossRef]
- Vazquez, S.; Rodriguez, J.; Rivera, M.; Franquelo, L.G.; Norambuena, M. Model predictive control for power converters and drives: Advances and trends. IEEE Trans. Ind. Electron. 2017, 64, 935–947. [Google Scholar] [CrossRef]
- Li, C.W.; Tang, H.H.; Zheng, X.S.; Rong, H.J. Modeling and quadratic optimal control of three-phase APF based on switched system. Proc. CSEE 2008, 28, 66–72. [Google Scholar]
- Ding, Q.Q.; Tang, H.H.; Rong, Y.J.; Jiao, F. Modeling and h∞ control of three-phase APF based on switched system. Trans. China Electrotech. Soc. 2008, 23, 125–131. [Google Scholar]
- Egidio, L.N.; Deaecto, G.S.; Barros, T.A. Switched control of a three-phase AC-DC power converter. IFAC-PapersOnLine 2020, 53, 6471–6476. [Google Scholar] [CrossRef]
- Li, X.F.; Qu, L.L.; Ren, W.D.; Zhang, C.X.; Liu, S.Y. Controllability of the three-phase inverters based on switched linear system model. In Proceedings of the IEEE International Conference on Industrial Technology, Taipei, Taiwan, 14–17 March 2016. [Google Scholar]
- Tian, C.Y.; Li, K.; Zhang, C.H.; Zhuang, F.F.; Ye, B.S. Control strategy for bi- directional AC-DC converter based on switched system model. Trans. China Electrotech. Soc. 2015, 30, 70–76. [Google Scholar]
- Guo, X.; Ren, H.P. A switching control strategy based on switching system model of three-phase VSR under unbalanced grid conditions. IEEE Trans. Ind. Electron. 2021, 68, 5799–5809. [Google Scholar] [CrossRef]
- Bolzern, P.; Spinelli, W. Quadratic stabilization of a switched affine system about a nonequilibrium point. In Proceedings of the 2004 American Control Conference, Boston, MA, USA, 30 June–2 July 2004. [Google Scholar]
- Della Rossa, M.; Egidio, L.N.; Jungers, R.M. Stability of switched affine systems: Arbitrary and dwell-time switching. arXiv 2022, arXiv:2203.06968. [Google Scholar] [CrossRef]
- Yan, S.; Yang, Y.H.; Hui, S.Y.; Blaabjerg, F. A review on direct power control of pulse width modulation converters. IEEE Trans. Power Electron. 2021, 36, 11984–12007. [Google Scholar] [CrossRef]
- Guo, X.; Ren, H.P. Nonlinear feedback control of compound active-clamp soft-switching three-phase PFC converter base on load observer. In Proceedings of the IEEE Energy Conversion Congress and Exposition, Pittsburgh, PA, USA, 14–18 September 2014. [Google Scholar]
- Bao, X.W.; Zhuo, F.; Tian, Y.; Tan, P.X. Simplified feedback linearization control of three-phase photovoltaic inverter with an LCL filter. IEEE Trans. Power Electron. 2013, 28, 2739–2752. [Google Scholar] [CrossRef]
- Golestan, S.; Guerrero, J.M.; Vasquez, J.C. Three-phase PLLs: A review of recent advances. IEEE Trans. Power Electron. 2017, 32, 1894–1907. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Subsystem | Fα | Fβ | [Swa Swb Swc] |
|---|---|---|---|
| Su1 | 0 | 0 | [0 0 0] |
| Su2 | [0 0 1] | ||
| Su3 | [0 1 0] | ||
| Su4 | [0 1 1] | ||
| Su5 | [1 0 0] | ||
| Su6 | [1 0 1] | ||
| Su7 | [1 1 0] | ||
| Su8 | 0 | 0 | [1 1 1] |
| Sectors | Subsystems | Sectors | Subsystems | Sectors | Subsystems |
|---|---|---|---|---|---|
| Sector 1 | Su1 | Sector 5 | Su1 | Sector 9 | Su1 |
| uc ≥ ua > 0 > ub | Su2 | ua > 0 ≥ ub > uc | Su5 | ub ≥ uc > 0 > ua | Su3 |
| Su6 | Su7 | Su4 | |||
| Sector 2 | Su1 | Sector 6 | Su1 | Sector 10 | Su1 |
| ua > uc ≥ 0 > ub | Su5 | ub > ua ≥ 0 > uc | Su3 | uc > ub ≥ 0 > ua | Su2 |
| Su6 | Su7 | Su4 | |||
| Sector 3 | Su5 | Sector 7 | Su3 | Sector 11 | Su2 |
| ua > 0 > uc ≥ ub | Su6 | ub > 0 > ua ≥ uc | Su7 | uc > 0 > ub ≥ ua | Su7 |
| Su8 | Su8 | Su8 | |||
| Sector 4 | Su6 | Sector 8 | Su3 | Sector 12 | Su2 |
| ua > 0 ≥ ub > uc | Su7 | ub > 0 ≥ uc > ua | Su4 | uc > 0 ≥ ua > ub | Su6 |
| Su8 | Su8 | Su8 |
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| AC Voltage RMS | Uin = 220 V | Filter Inductance Filter | L = 20 mH |
| Equivalent Resistance | R = 3 Ω | Filter Capacitance | C = 1500 µF |
| Load | RL = 300 Ω | Sampling Frequency | fs = 40 kHz |
| Observer Gain | γ = 50 | Feedback Control Gain | ku = 60 |
| Active Power Reference | Pr = 1200 W | Reactive Power Reference | Qr = 0 Var |
| Strategy | The VOC in [7] | The DPC in [8] | The FCS-MPC in [18] | The Proposed Method |
|---|---|---|---|---|
| Mathematical Model | Current state equation in dq frame | Instantaneous power model in dq frame | Current predictive model in αβ frame | Power Switching model in abc frame |
| Number of Control Parameters | ≥4 | ≥2 | 0 | 0 |
| Sampling Frequency | 10 kHz | 10 kHz | 40 kHz | 40 kHz |
| Switching Frequency | 10 kHz | 10 kHz | 10 kHz | 10 kHz |
| Computation Burden | Very High (221 times SOP) | High (171 times SOP) | High (159 times SOP) | Low (96 times SOP) |
| Robustness | Very Weak | Strong | Weak | Very Strong |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, X.; Qiao, J.; Li, Y.; Jiao, S. A Robust Switching Control Strategy for Three-Phase Voltage Source Converters with Uncertain Circuit Parameters. Energies 2024, 17, 1832. https://doi.org/10.3390/en17081832
Guo X, Qiao J, Li Y, Jiao S. A Robust Switching Control Strategy for Three-Phase Voltage Source Converters with Uncertain Circuit Parameters. Energies. 2024; 17(8):1832. https://doi.org/10.3390/en17081832
Chicago/Turabian StyleGuo, Xin, Jichen Qiao, Yankai Li, and Shangbin Jiao. 2024. "A Robust Switching Control Strategy for Three-Phase Voltage Source Converters with Uncertain Circuit Parameters" Energies 17, no. 8: 1832. https://doi.org/10.3390/en17081832
APA StyleGuo, X., Qiao, J., Li, Y., & Jiao, S. (2024). A Robust Switching Control Strategy for Three-Phase Voltage Source Converters with Uncertain Circuit Parameters. Energies, 17(8), 1832. https://doi.org/10.3390/en17081832