1. Introduction
According to the 2011 energy outlook, with the current trend the transportation sector’s share in total oil consumption will raise from 40% in 2008 up to 54% by 2035 [
1]. Forecasts by the Energy Information Agency (EIA) anticipate rising oil prices over the next two decades, which in a high price scenario may surpass $5.5 per US gallon. Therefore, technologies related to reducing the oil consumption of the transportation section such as Plug-in Hybrid Electric Vehicles (PHEVs) or all Electric Vehicles (EVs) are starting to take their share in the vehicle market and will potentially replace combustion engine vehicles in the future [
2]. Some economic studies anticipate that depending on the future oil price and the relative purchase price of internal combustion engine vehicles, EVs may take up to 86% of new light-vehicle sales by 2030 [
3].
EVs have higher production cost compared to combustion engine vehicles, which makes them not the first choice for a large percentage of consumers at the moment. Further, with the relatively slow improvement of battery technology comparing to other technologies, the total production cost of the EVs will not decrease substantially in the near future [
4]. Some industrial reports claim that the total cost of ownership of Li-ion powered EVs, which includes initial price and also fuel, maintenance, and other costs over the life of the car is less than the combustion engine vehicles [
5]. Unfortunately, the majority of consumers tend to focus more on initial cost, not total cost of ownership, when they make vehicle purchasing decisions [
2]. Therefore, government or private companies should provide incentives or financing to consumers to make EVs marketable.
In 2010, a provider named “Better Place” demonstrated the World’s first switchable battery electric taxi for urban areas in Japan [
6]. In switchable batteries transportation systems, network operators finance the cost of the battery by offering electric car drivers pay-per-mile service contracts. These contracts also include the price of charging infrastructure as well as charging electricity price [
3]. Financing the EV battery with a service contract has a number of advantages. First, a switchable battery eliminates the up-front cost of the battery for the customer. Second, it allows new battery technology to be installed in older EVs. Third, it eliminates the risk of purchasing a car whose battery life is shorter than the life of the EV. Fourth, switchable batteries contract opens the door for Vehicle to Grid (V2G) services since if the utility owns the battery, it is easier to convince the customer to use the EV battery for V2G.
EVs have the potential to serve the grid as distributed energy storage. Most vehicles are parked an average of 95% of the time and remain connected to the grid in charging or idle mode. Thus, their batteries and chargers could be used to let active and reactive power flow from the car and internal capacitors back to the power lines and to the grid [
7]. Therefore, the EV charger can be designed to be able to support the grid during critical conditions, namely, active power ride-through, regulation of reactive power, and sending active power back to the grid for peak shaving [
8]. In addition, the chargers can be coordinated to start charging during low peak hours of the local distribution system. In this case, EVs indirectly support the grid with intelligent charging. V2G can be implemented using either hybrid vehicles or pure electric vehicles. Moreover, charging of the EV can be slowed or stopped according to demand response contracts, and emergency load curtailment [
9]. The possibility of V2G services has been studied for more than a decade [
10] and it is gaining more and more popularity as percentage of battery based PHEVs and EVs penetration into the grid is increasing [
11].
The ability to use EVs and PHEVs as a resource depends on appropriate supporting infrastructure, and customers who are willing to provide the services as well as presence of bidirectional chargers [
9]. Several studies have discussed bidirectional charger topologies as well as different control methods to use the EV as a potential distributed energy resource [
12,
13,
14,
15]. These topologies allow the charger to send active and sometimes reactive power in both directions,
i.e., from vehicles to the grid and from the grid to the vehicles.
The active power markets of V2G can be divided into four general groups [
7]. These four groups are base load, peak, spinning reserves, and regulation. Base load power is defined as the bulk power generation that is running most of the time. As V2G for base load power requires a large amount of battery charge, it is not discussed here. Peak shaving occurs during predictable highest power demand hours. Spinning reserves are supplied by fast generators ready to respond in case of equipment or power supplier failures. Spinning reserves should be included in system power design to meet contract requirements and are typically called around 20 times a year. The duration of supply by a spin reserve is typically around 10 min but the source must be able to last up to 1 hour. Active regulation is used to keep the frequency and voltage steady. Regulation is called for only a few minutes at a time, but the number of times can be up to 400–500 times per day. The utility pays spinning reserves and regulation sources in part for just being available, per hour availability; however, base load and peak shaving are paid per kWh generated.
The Power quality services can be classified into motor starting, active filtering, and general reactive power regulation. Large induction motors or combinations of medium size motors starting at the same time require a large amount of instantaneous reactive power for a short period of time during their acceleration [
16]. The reactive power can be injected locally through the EVs charger to compensate for the reactive power need during motor startup. EV charging stations can be used as shunt active filter to improve power quality of girds integrating wind generation [
17]. Reactive regulation is required frequently during power system operation. Reactive power is usually supplied locally by capacitor banks or other reactive compensators. Due to the presence of EV charging stations in the distribution system, EVs are possible source of reactive power for the distribution system.
The rest of the paper is organized as follows:
Section 2 discusses possible vehicle or grid support and coordination services. It studies reactive regulation, LVRT and PV transients, motor starting in details. Charging coordination, peak shaving, active regulation, spin reserve are also discussed briefly.
Section 3 presents a comparison of V2G services based on the amount of energy, value, and feasibility. Finally,
Section 4 presents our concluding remarks.
2. Vehicle to Grid
2.1. Coordinated Charging
Charging of PHEV and EVs add an extra burden on the current distribution grid. If this extra loading is not coordinated properly, it can cause expedited aging of the equipment and tripping of the relays under severe overload conditions. For example, a study reports that charging four PHEVs without any coordination to a 25kVA transformer which is already 80% loaded results in a 10%–50% reduction in transformer service lifetime [
18]. Thus, grid improvements are necessary to alleviate the tension on the lines in some cases. However, in the majority of cases this problem can be solved by intelligent charging methods such as coordinated charging.
Coordinated charging means that in nodes that are far from the slack bus, vehicle charging is scheduled to occur at moments of low demand. Coordinated charging can be approached from the power loss, flattening out the peak power point of view [
19] which results in less tension on the distribution system. The problem can also be formulated as an optimization problem to minimize energy losses while switching On Load Tap Changers (OLTC) devices as infrequently as possible [
20]. If coordinated charging is implemented for multiple PHEVs, grid enhancements may not be necessary or at least the need for enhancements will be significantly reduced.
Coordinated charging does not require upgrading the distribution infrastructure. However, the Energy Management System (EMS) should reach the charger of EV to perform demand response action for coordinated charging. In other words, the EMS should be able to shed the EVs charger from the grid in case of overload. The power system industry is currently investigating smart-meters, which are metering devices that can send the load data back to the EMS. Smart-meters can be expanded to be able to classify loads as sensitive and non-sensitive loads. If a smart-meter is present at the connection point of the EV, it may classify the EV as a non-sensitive loads. Coordinated charging of EVs with help of smart-meters can shift peaks and extend equipment life.
2.2. Peak Shaving
Demand peaks have a negative effect on the economic efficiency of power systems. The energy management system has to start generation units of lower efficiency or hold them in reserve to cover the peaks. In addition, power demand peaks result in increased costs in power system planning. Injection of local active power during peak load hours can help reducing the peak power demand of the distribution system.
Some research findings show that the value of offering these services could reach thousands of dollars over the life of the vehicle [
21]. The average benefits from V2G participation of an EV is estimated to range from $392 to $561 annually per vehicle [
22]. Another study estimated that in a utility with a medium value of peak power, V2G can result in a net present value of $2,370 to the utility at a net present cost of $955 to the vehicle owner [
7]. However, these studies do not model the impact of battery aging due to a V2G application in detail.
Although the revenue from V2G services can be split between utility companies and vehicle owners [
9], the customers may not find V2G as beneficial as utilities because of the battery wear down due to kWh throughput, depth of discharge, and overheating of the battery. However, if the utility finances the battery with a switchable batteries contract, V2G becomes more viable for active peak shaving. Nevertheless, the cost of energy stored in a battery is still too high [
23] and recharging the battery that has been used for V2G services takes additional time.
Higher ambient temperature and greater depth of discharge of the battery can significantly decrease the battery cycle life [
24]. The ambient temperature can be controlled to an optimal value if a thermal management system is installed in the car (Chevy Volt and Nissan Leaf), leaving the battery life only subject to Depth of Discharge (DoD) and cycle. From the economic point of view, the annual cost of V2G varies depending on the price of energy and the price of battery in a specific country. For example, the annual cost of V2G for lead acid, lithium-ion, and NiMH batteries in China is much greater than that in the UK [
24]. Therefore, the V2G cost estimate in [
24] claims that lead-acid and NiMH batteries are not cost effective and as a result according to the present electricity tariff is not cost effective for the peak power sources in China. However, the same study states that lithium-ion batteries are cost effective in the UK due to their longer cycle life. Thus, [
24] concludes that V2G economics do not favor lead-acid or NiMH. Due to the advances and advantages in lithium-ion technologies, future research is likely to be more fruitful by focusing on the lithium-ion batteries. Another study on a PHEV pack made of lithium iron phosphate cells concludes that peak shaving activities results in little capacity loss of the battery [
25].
From the utility’s perspective, it is not possible to locate the exact connection point of EVs unless fixed charging stations are present in industrial corporation parking lots. Thus, the focus of peak shaving using EVs in this paper is only in industrial areas. Another challenge facing the utilities is that the grid is usually designed for unidirectional power flow and sending power back to the grid interferes with most of the current anti-islanding schemes [
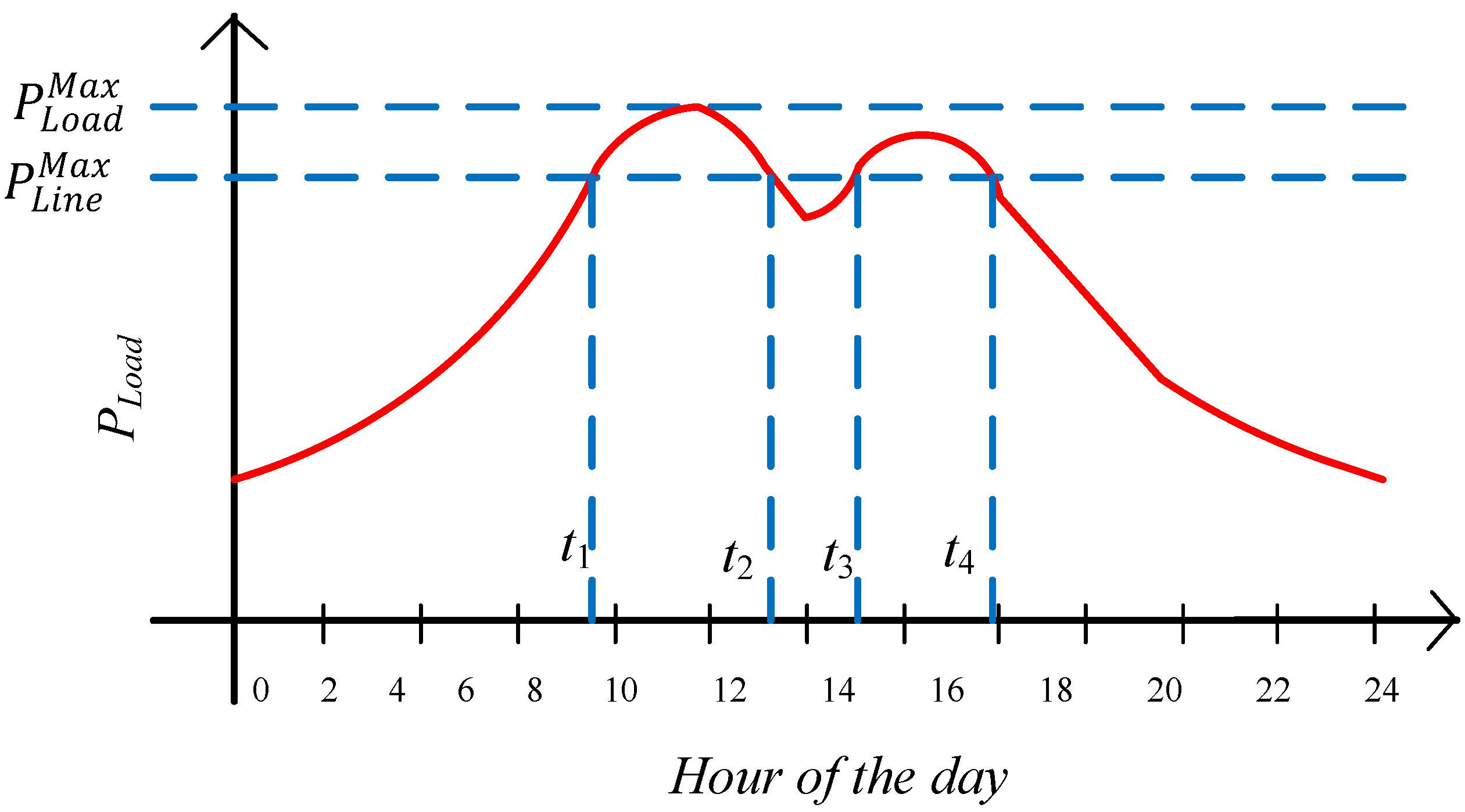
26]. Thus, anti-islanding schemes need to be updated in some cases to be able to send energy back to grid from EVs. This means implementing peak shaving V2G service requires additional investments and upgrading the network. From customer’s perspective, the value of peak shaving is not clear. The high cost of energy saved in the battery, the battery life shortening due to excessive charge/recharge cycles, and additional charging time are the disadvantages of peak shaving. In addition, the financial net return to the owner can be relatively small resulting in small financial incentive for the customer to sell surplus power to the grid. To calculate the amount of energy required for peak shaving, a sample commercial load, which requires peak shaving, is demonstrated in
Figure 1 [
27].
Figure 1.
Load curve, and capacity of feeder.
Figure 1.
Load curve, and capacity of feeder.
The necessary condition for “
n − 1” security during peak load is that the line power flow,
, does not exceed the line capacity,
, as follows [
27]:
Assuming that the EVs are used to provide power in order to reduce the line power flow, the EVs have to deliver the difference between the maximal power demand
and the maximal line power flow
:
is the maximum required local injection power from the EVs to achieve power system reliability requirements. The number of EVs needed to provide the required energy during peak shaving is computed as the cumulated energy during the peak load time that EVs deliver power to the grid. The peak load can drop below the line capacity for a certain period. During this period, the EV batteries can recharge from the grid until total load exceeds the line capacity again. Recharging the EVs during this period results in a decrease in the number of required EVs.
The energy rating of the EVs is calculated by integrating the desired power over the time as follows:
is the energy that the EVs have to deliver for peak shaving. The first and third integral terms are positive values and the second integral is a negative value. The number of EVs required to provide the energy for peak shaving of a specific condition must satisfy the following inequality:
where
is the number of vehicles needed to provide the required energy during peak shaving. On the other hand, the vehicles should be able to provide the maximum peak power, which means that the number of needed vehicles should satisfy the following equation:
where
is the number of vehicles needed to provide peak power during peak shaving. Assuming that
is the smallest integer to satisfy Equation (4) and
is the smallest number to satisfy Equation (5), the minimum required vehicles,
n, can be found as follows:
2.3. Active Regulation
Active power regulation is responsible for maintaining the frequency of the grid at 50 or 60 Hz [
23]. Active regulation has value ranging from $30 to $45/MW per hour in regions with deregulated power. The grid operator usually requests active power regulation using a real-time communication signal. Regulation occurs with random and uncorrelated patterns in the system and the maximum swing is usually small [
26]. Therefore, a unit with short response time and high ramp rate is required to provide this service. If EVs are connected to the grid through a high power DC/AC inverter, the batteries can be used for active regulation of the grid. EVs power electronics chargers have fast response time and high ramp rate, which makes them suitable for regulation. Sizing of the battery and the AC/DC interface is important for regulation. Some researchers state that if the battery is sized adequately, the state of charge should only fluctuate around its initial status. If the battery kWh and V2G contract are sized correctly, the battery wear resulted from regulation cycling is substantially less than the value of this service [
23].
Table 1 summarizes the required storage characteristics for regulation.
Table 1.
Required energy storage characteristics to provide regulation [
28].
Table 1.
Required energy storage characteristics to provide regulation [28].
| Characteristic | Regulation |
|---|
| Cycle life (20 year) | 500,000 |
| Round trip efficiency | High |
| Response time | More than 1 min |
| Power delivery duration | Continuous |
| Potential technologies | Flywheels, Ultra capacitors, EVs |
2.4. Spin Reserve
Another market of interest for V2G is spinning reserves with a current market value of $10/MW per hour [
23]. Spinning reserve is provided by online generators that can change their output immediately in response to major transmission outages. These units are equipped with AGC telecommunication facilities and can reach their full output within 10 min to comply with NERC disturbance control standard. Spinning reserves should be capable of sustaining their response for two hours. Spinning reserve is required less frequent than active regulation and typically, requests for spinning reserve are made around 20–50 times a year. Spinning reserve requires a generation capacity that can provide power to the grid immediately and reach full capacity within 10 min. In other words, spinning reserve requires low total energy with a quick response time, which is well suited for batteries. The active power must be provided by equipment electrically synchronized with the grid, which is well suited for an EV connected to a charger with phase lock loop. In this case, the EV owner will get paid not only for the service, but also for their ability to provide power during an unplanned event, such as a generator failure [
23]. The challenge facing the use of EVs as spinning reserve is that the utility should be certain that enough EVs are present and connected to the system with available charge in the battery that can be used as a reserve in the system.
2.5. Reactive Regulation
The literature lacks a deep technical analysis about reactive power compensation using EVs [
29]. The topology of the bidirectional charger needs minimal changes to make it suitable for reactive support. In [
30,
31] the single phase inverters have been studied for injection of reactive power into the grid. The voltage rating of the dc-link capacitor should be increased by at least 3%. The current ripple rating of the DC link capacitor is more than enough for reactive power operation. The total losses of the AC/DC converter slightly increases by adding reactive power support with normal operation of the charger. The EV battery and the current of the input inductor is not affected by reactive operation at all [
8].
Reactive power compensation studies shows that the DC link capacitor is enough to supply reactive power to the grid even without engaging the EV battery. Thus, reactive power regulation causes no degradation on EVs battery life [
29]. This feature makes EV charger the perfect candidate for reactive regulation since the standalone charger is enough for reactive power injection to the grid even when the vehicle is not connected to the charger.
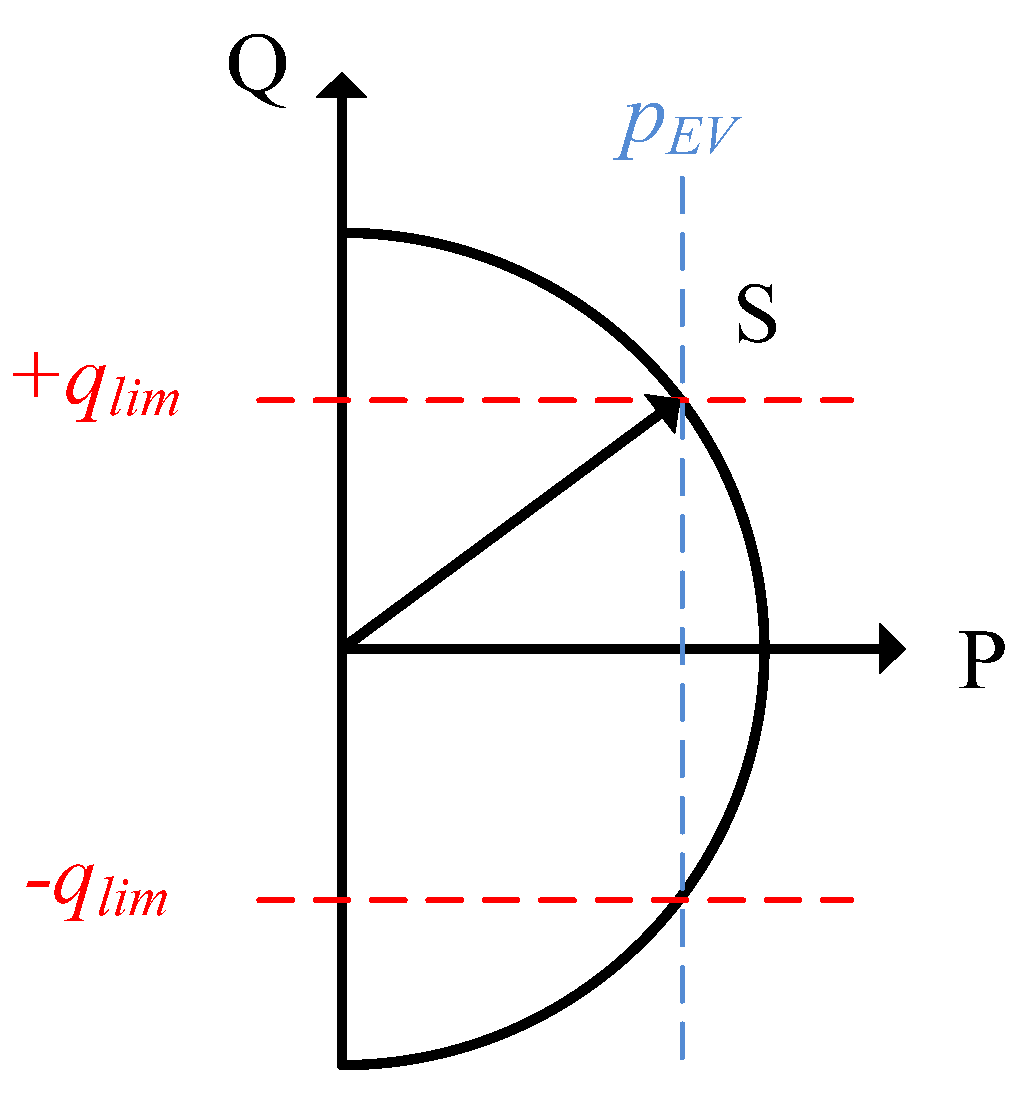
The amount of reactive power that the charger can supply during charging mode is limited by the chargers power limit and the amount of active power drawn from the grid. Thus, until the charger fully charges the battery, the reactive power support capacity of the EV is as follows [
32]:
If the battery is drawing maximum power from the charger, then the charger is not capable of producing reactive power. However, if the apparent power capability of a charger exceed the instantaneous real power drawn from the grid
p by the battery, the range of allowable reactive power generation is given by the following Equation (7).
Figure 2 illustrates the limit of the reactive generation of the AC/DC inverter. The battery is not drawing active power from the grid most of the time so the charger is in idle mode and capable of injecting reactive power. The charger can be rated at 10%–20% higher power than the maximum real power drawn during charging to make the charger capable of injecting reactive power to the system during all operating conditions.
Figure 2.
Reactive power generation limit [
32].
Figure 2.
Reactive power generation limit [
32].
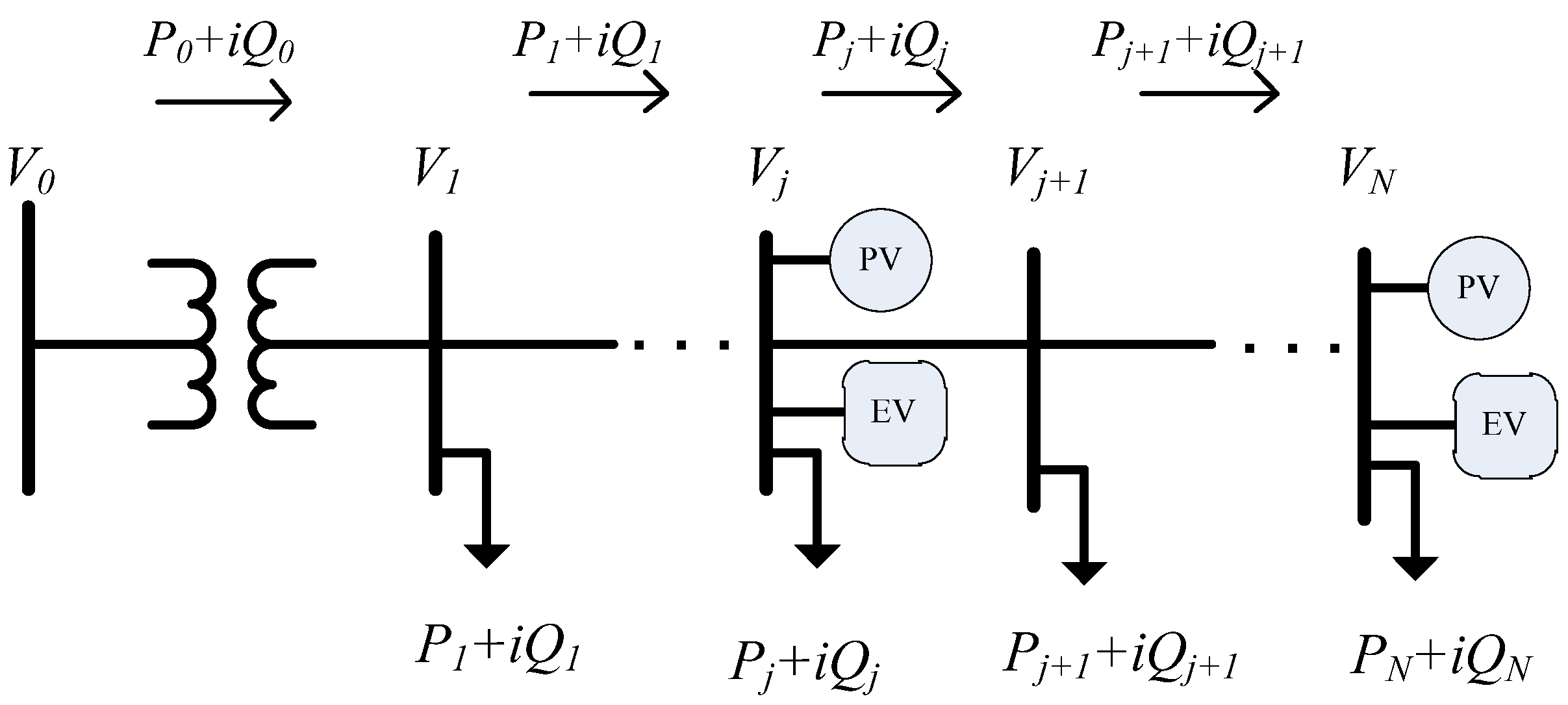
Reactive injection to the system can be controlled locally by injecting reactive power relative to the voltage drop at the connection point of the EV. This method is easy to implement and does not require communication infrastructure. In addition, it is not necessary for the utility to know the exact location of the EVs. The reactive regulation problem can be formulated as a global optimization problem. This method requires power flow information of the system and communication infrastructure to send local measurements to the power management unit. The power management unit should also have the exact location of the connection of EVs to the system. Thus, this method is suitable for PV and EV pairs at fixed location.
Figure 3.
A branch in a radial distribution system.
Figure 3.
A branch in a radial distribution system.
For a typical branch of a distribution system shown in
Figure 3, the aggregate active power at node
j is as follows:
where
is the total load at node
j,
is the active injection or withdrawal of the electric vehicle connected to node
j, and
is the active power generated by the Distributed Generator (DG) connected to node
j:
where
is the total load at node
j, and
is the reactive injection of the electric vehicle connected to node
j.
The power flow of the radial AC distribution system can be solved using DistFlow AC power flow [
33]:
where
and
are the active and reactive power flowing away from node
j toward node
j + 1,
is the voltage at node
j,
is the impedance of the line between node
j and
j + 1, and
and
are the active and reactive power drawn from node
j. It should be noted that both
and
are aggregate directing to the power leaving the node. The quadratic terms in Equations (10–13) are relatively small in the local distribution systems studied in this paper. Therefore, mathematical manipulation using the approximation
, leads to following power flow equations:
As mentioned before the vehicle
j has the following limit of reactive production at any given time:
The cost function can be penalizing the cost of the deviation of the measured bus voltage from the nominal bus voltage:
The advantage of the optimization method is that the charging of EV battery can be stopped when voltage support is needed in the system making the charger capable of injecting maximum reactive power to the grid.
2.6. Low Voltage Ride-Through (LVRT) and PV Transients
With an annual growth rate of 25%–35%, photovoltaic sources are among the fastest growing energy sources over the past decade. Prior to 1999, the primary market for PV source was in off-grid applications. However, over 80% of the recent market for the PV source is for grid-connected applications where the source is connected to a strong grid or an isolated grid as a distributed generator. As an increasing number of PVs are being connected to the grid through interface converters, their dynamic behaviors are critical to the stability of the AC power system. Grid codes also demand reactive current injection during a fault to support grid stability [
34].
Until recently, grid codes enforced that the PV generators connected to the grid had to be disconnected during faults. However, new grid code are starting to permit the PV units to remain connected to the grid and even actively support the grid during faults and transients [
35]. For example, due to the significant penetration of solar sources in the German power grid, the German grid code which is sufficiently developed on PV sources, has renewed requests for PV sources connected to the grid. Other grid codes will follow the same renewals in the near future.
EVs connected with a charger to the grid can support the grid fault and LVRT conditions. The EV charger can perform the grid support by injecting reactive power during grid faults. If the EV has a separate AC/DC interface to the grid, reactive injection can be performed by the EV charger and the PV source simultaneously. Further, if the same AC/DC interface is used for the PV and the EV charger, the single AC/DC interface can perform the reactive support. In the latter scenario, since the single AC/DC interface is rated higher than the individual interfaces, the distributed source has the same reactive capability as the former scenario. In either scenario, the capacitors of DC link is usually enough to inject reactive power to the grid without engaging the DC sources.
On the other hand, solar sources may go through transients of active power production during faults or in cloudy days resulting in periods of low active power production. If the low active power production period of the solar coincides with the peak load, the line current will increase over the rated current to provide enough active power to the load. In this case, EVs can help reduce the temporary tension on the line and the distribution transformers by injecting enough active power to the system.
2.7. Motor Starting
Large induction motors or combinations of medium size motors starting at the same time require a large amount of instantaneous reactive power for a short period during their acceleration. This depletion of reactive power from the distribution system can cause significant disturbances especially in weak distribution systems. Typically, a medium voltage motor consumes about 5 to 6 kVA per motor horsepower during startup period for hard starting [
16].
During motor startup, the inrush current flowing to the motor causes a momentary voltage drop on the adjacent buses of the distributions system, which results in a reduction of the voltage, supplied to the motor and other loads of the distribution system. Given that motor torque capability is proportional to the square of the applied voltage, the voltage drop causes a reduction in the motor torque, which reduces its ability to breakaway or accelerates its mechanical load. Also, large voltage drops result in effects such as flickering lights, excessive motor currents and tripping of relays or even the main contactor dropout in distribution systems [
16].
The lights visibly start to flicker at 3% voltage sag and the flickering becomes irritating at 6% voltage sag. Thus, the voltage sag that occurs on utility systems due to motor start should be limited to a maximum of approximately 6%. The magnitude of the voltage drop during motor startup is a function of the motor inrush current, the impedance of the circuit between the utility power system and the motor, and the available short circuit fault capacity of the utility system.
One method to overcome the instantaneous reactive demand in weak distribution systems is utilization of capacitors to compensate for as much as half of the expected voltage drop during a direct on-line start [
16]. Another method to overcome the voltage sag in weak networks injecting reactive power through the power electronics interfaced sources available in the system to achieve reactive compensation. EVs interfaced to the system with AC/DC inverters can locally provide the reactive power for induction motor startup.
Providing reactive power through the AC/DC inverter during motor startup has many benefits. First of all the rating of the upstream equipment including the transformer and the lines stay the same which results in cost reduction of the distribution system design. In addition, the capacity of the lines is not wasted for transmission of reactive power, which means reactive power losses of the line will substantially decrease. Further, local injection of reactive power through the AC/DC inverter eliminates the need for startup capacitor, which is usually placed for hard starting of the motor. Removing the startup capacitors reduces the design cost and eliminates the risk of overvoltage that may occur in the system if the capacitor is not disconnected after the motor startup.
3. Comparison
Table 2 shows the typical duration of the V2G services. It is notable that the amount of energy required for each service depends not only on duration but also on the demanded power.
Table 2.
Duration of V2G services.
Table 2.
Duration of V2G services.
| Service | Time |
|---|
| Peak shaving | 15 min–2 h |
| Active regulation | 1–5 min |
| Spinning reserve | 15–20 min |
| Reactive regulation | Seconds to 5 min |
| Renewable transients | Seconds to 30 min |
| Motor starting | Seconds |
Coordinated charging, helps to alleviate the tension on the grid during peak power load. In other words, coordinated charging can reduce the overload time on distribution transformers and distribution lines by actively controlling the charging of EVs. Coordinated charging can be implemented with various methods some of which does not require additional infrastructure cost. Since coordinated charging has a great value in system design by reducing the burden on the distribution system and its infrastructure cost is not high, the utilities will likely convince the customers to implement this method as soon as EV penetration in the grid increases.
Peak shaving requires significant charge from the battery due to its duration and required amount of power. Although some researches claim that the wear on some battery types due to peak shaving is small [
25], due to high amount of required energy and high depth of discharge of EV batteries, it seems unlikely that the utilities can persuade the customers and profitably implement this V2G service. However, peak shaving may become valuable if cheaper and more efficient battery technologies are presented in the future.
Active regulation is used to keep the frequency and voltage steady. The duration of regulation is usually short; however, the number of times it is used can be up to 400–500 times per day. EVs power electronics chargers have fast response time and high ramp rate, which makes them suitable for regulation. Due to the relatively small amount of energy required for active regulation and the short duration of the service, EVs are suitable for this service. Further, the EV batteries can charge from one instance of regulation to the next instance. Therefore, this service has a great value for the utility comparing to the burden on the EV batteries.
Spinning reserve requires a generation capacity that can provide power to the grid immediately and reach full capacity within 10 min. In other words, spinning reserve requires low total energy with a quick response time, which is well suited for batteries. In this case, the EV owner will get paid not only for the service but also for their ability to provide power during an unplanned event, such as a generator failure [
23]. The challenge facing the use of EVs as spin reserve is that the EVs is that the utility should be certain that enough EVs are present and connected to the system with available charge in the battery that can be used as a reserve in the system.
Reactive regulation is beneficial to the grid by improving the power quality grid. The important fact is that the EV charging stations can inject reactive power without engaging the battery [
8]. In addition, reactive regulation can be performed by minimal changes to the control method and topology of the chargers and does not require additional infrastructure cost. Therefore, using EVs for reactive regulations reduces the need for local reactive compensators in the distributions system and result in a net saving in system design. To get an estimate of the net saving, we note that the installed cost of capacitors ranges from 20 $/kVAr to 50 $/kVAr [
36], depending on control complexity and size. The increased need for high power quality has resulted in widespread distribution of capacitor banks in the grid. Thus, as penetrations of EVs in the grid increases, using EVs for reactive control will result in a high net saving at minimal cost with small or no wear of the EV batteries. Therefore, reactive power services of EVs have a great net value for the utility and customer.
Renewable energy sources go through transients due to fault or weather conditions. EVs connected with a charger to the grid can support the grid fault and LVRT conditions. Grid support through the EV charging stations result in small battery discharge. On the other hand, the value of replacement of compensators can range from 100 to 600 $/kW [
37]. Comparing to the amount of energy drawn from EV batteries, this service has a great value for the grid.
Motors require a large amount of reactive power during their startup, which can be provided by addition of an external capacitor, or other reactive compensators, adding up to the design cost. The system design cost reduces if local EV charging stations provide the required reactive power for motor starting. This service is similar to reactive V2G service and either does not engage the EV batteries or uses a small amount of battery charge.
Table 3 summarizes the relative value, cost, and discharge level of V2G services.
Table 3.
Comparison of V2G services (0: lowest–5: highest).
Table 3.
Comparison of V2G services (0: lowest–5: highest).
| Service | Value | Infrastructure cost | Battery discharge |
|---|
| Coordinated charging | 5 | 2 | 0 |
| Peak shaving | 3 | 4 | 5 |
| Active regulation | 3 | 4 | 3 |
| Spin reserve | 3 | 4 | 4 |
| Reactive regulation | 2 | 1 | 0 |
| Renewable transients | 4 | 1 | 1 |
| Motor starting | 2 | 1 | 1 |



{kind=link}
{kind=link}
{kind=link}

