Non Breaking Wave Forces at the Front Face of Seawave Slotcone Generators


 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction


2. Experiments
2.1. Tests Description


2.2. Breaker Types and Characteristics of Loadings
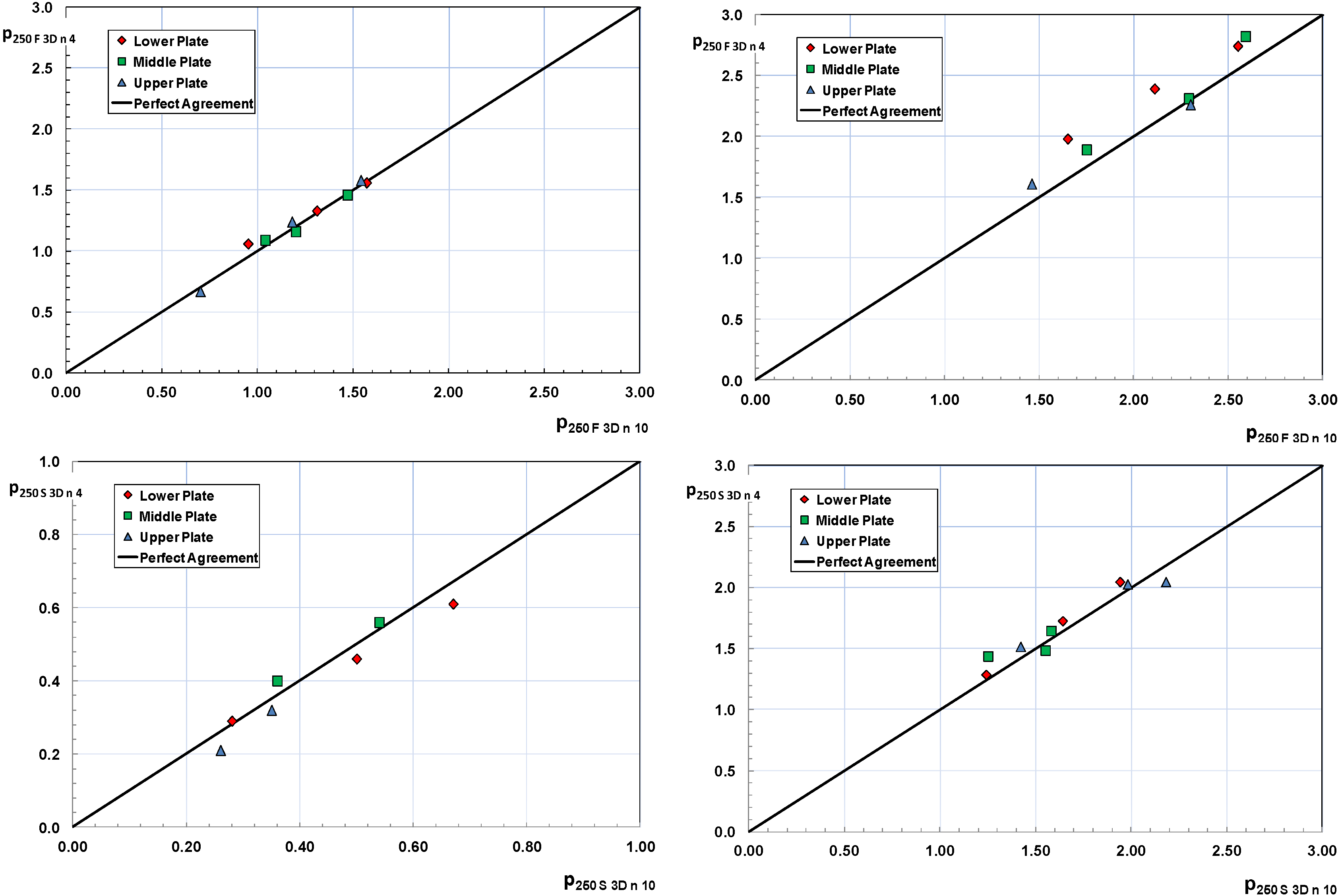
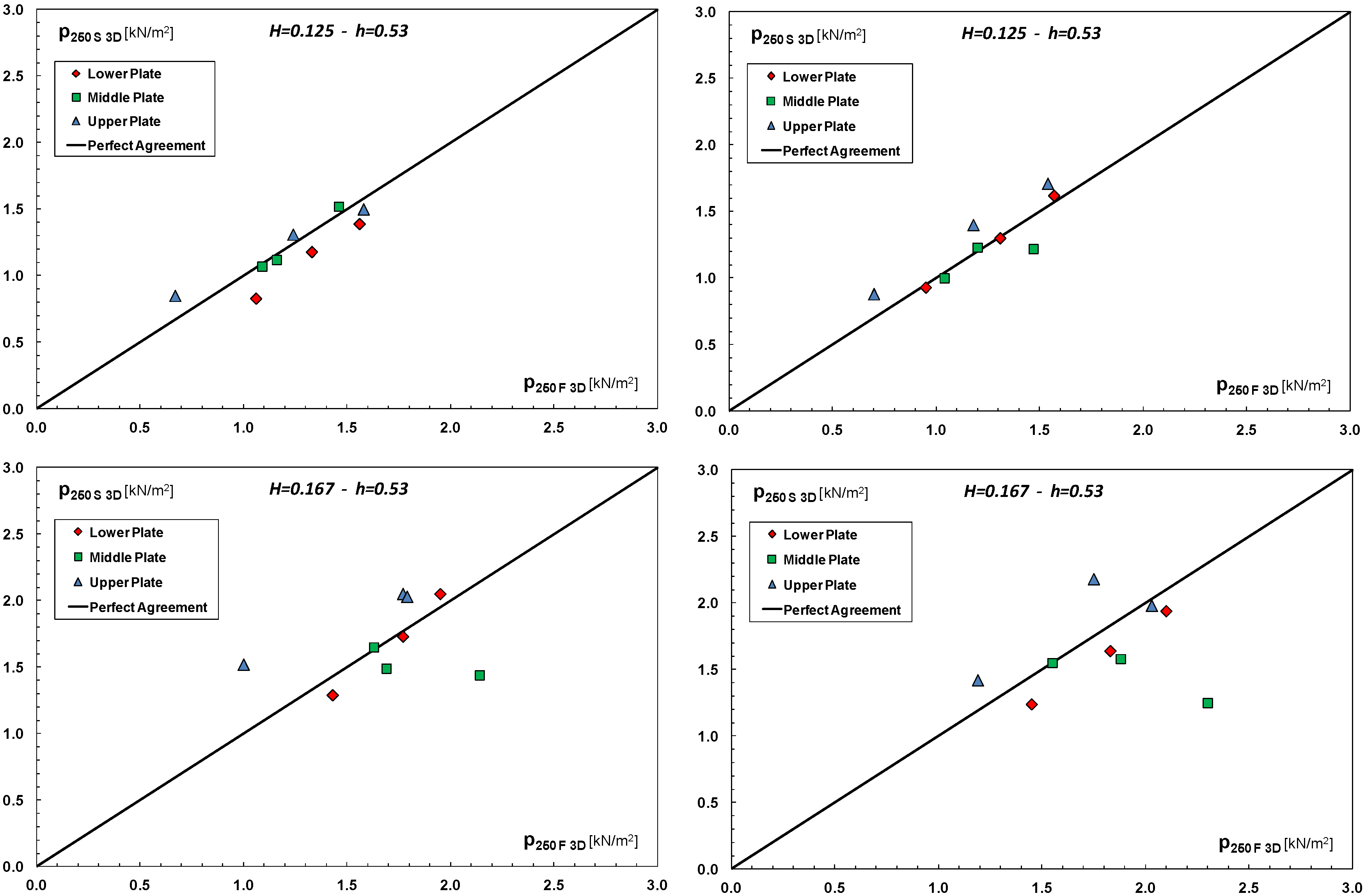
2.3. Model and Scale Effects
3. Japanese Design Practice for Monolithic Maritime Dikes

- a water depth at their toe relatively small;
- a low crest, allowing for a massive overtopping under the design wave conditions.
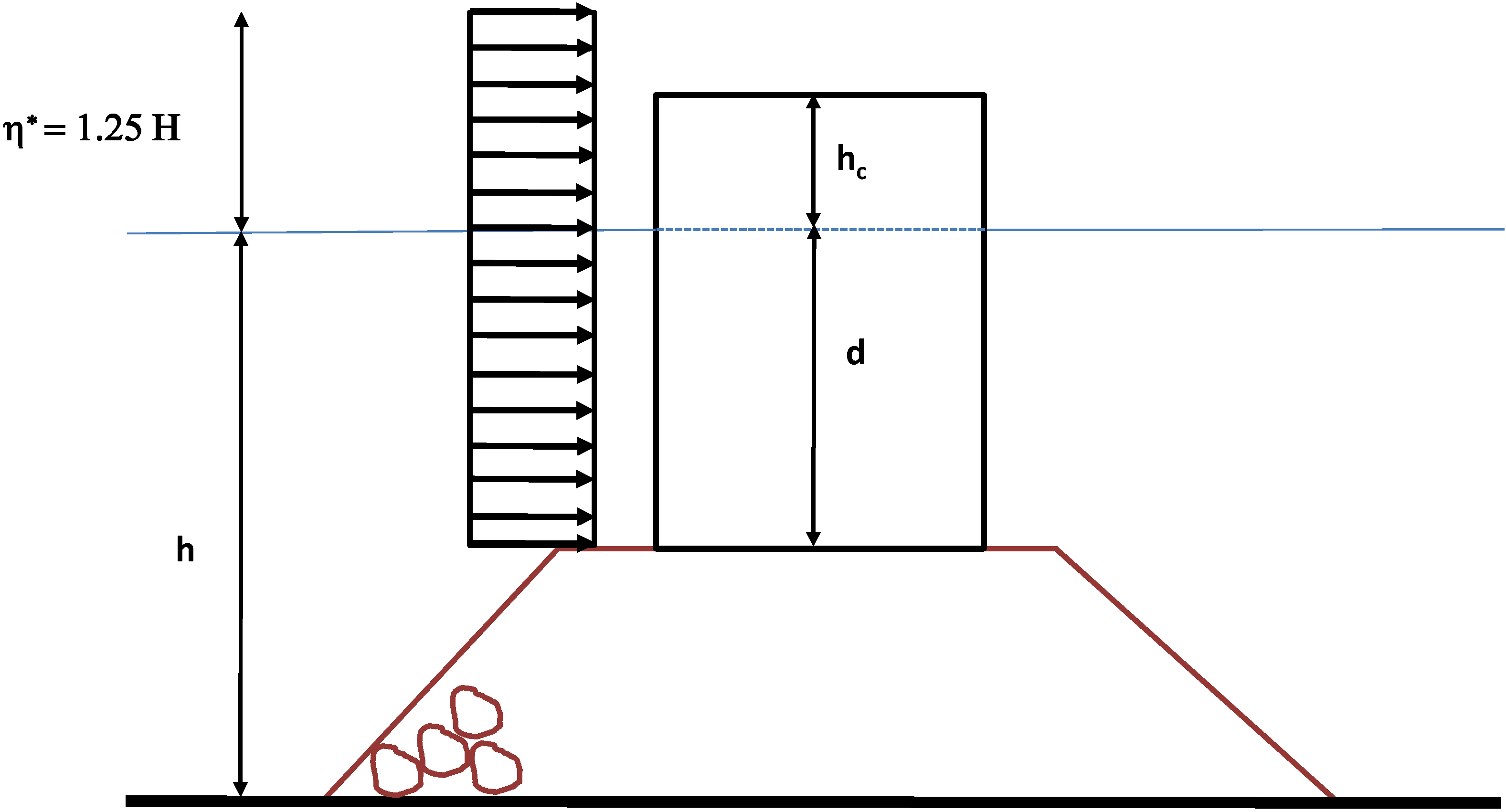
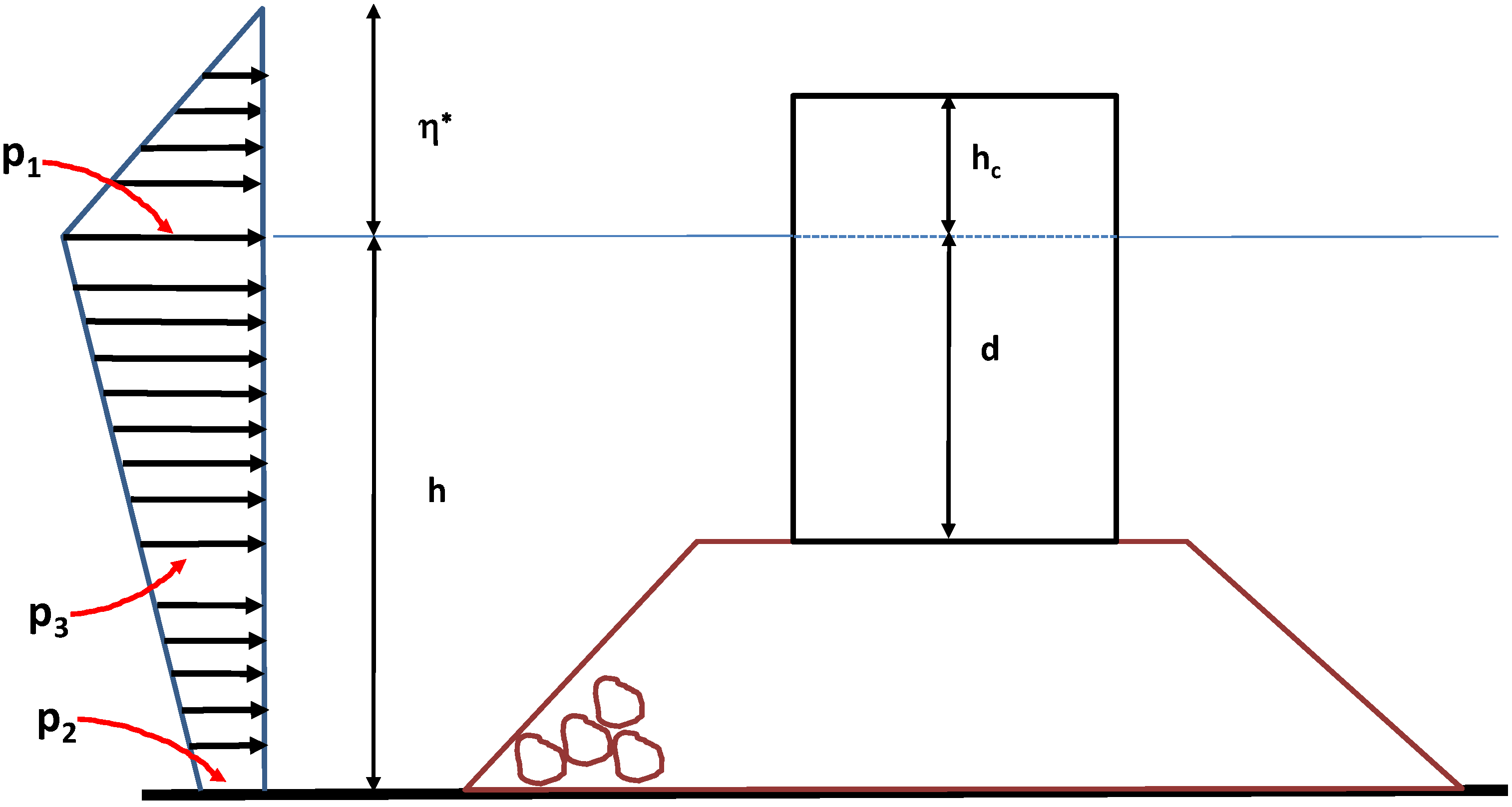
3.1. Vertical Face Breakwaters: the Formulae of Hiroi and Goda


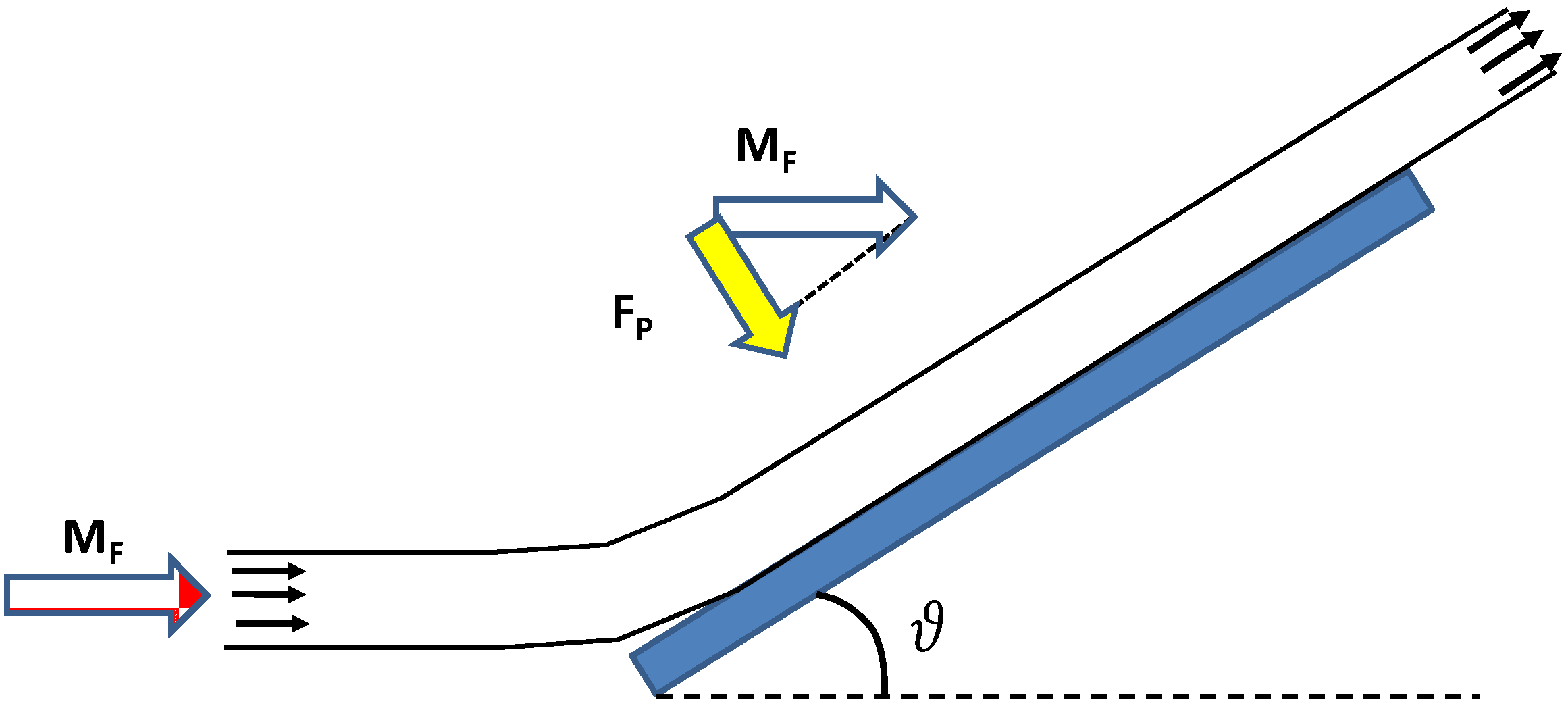
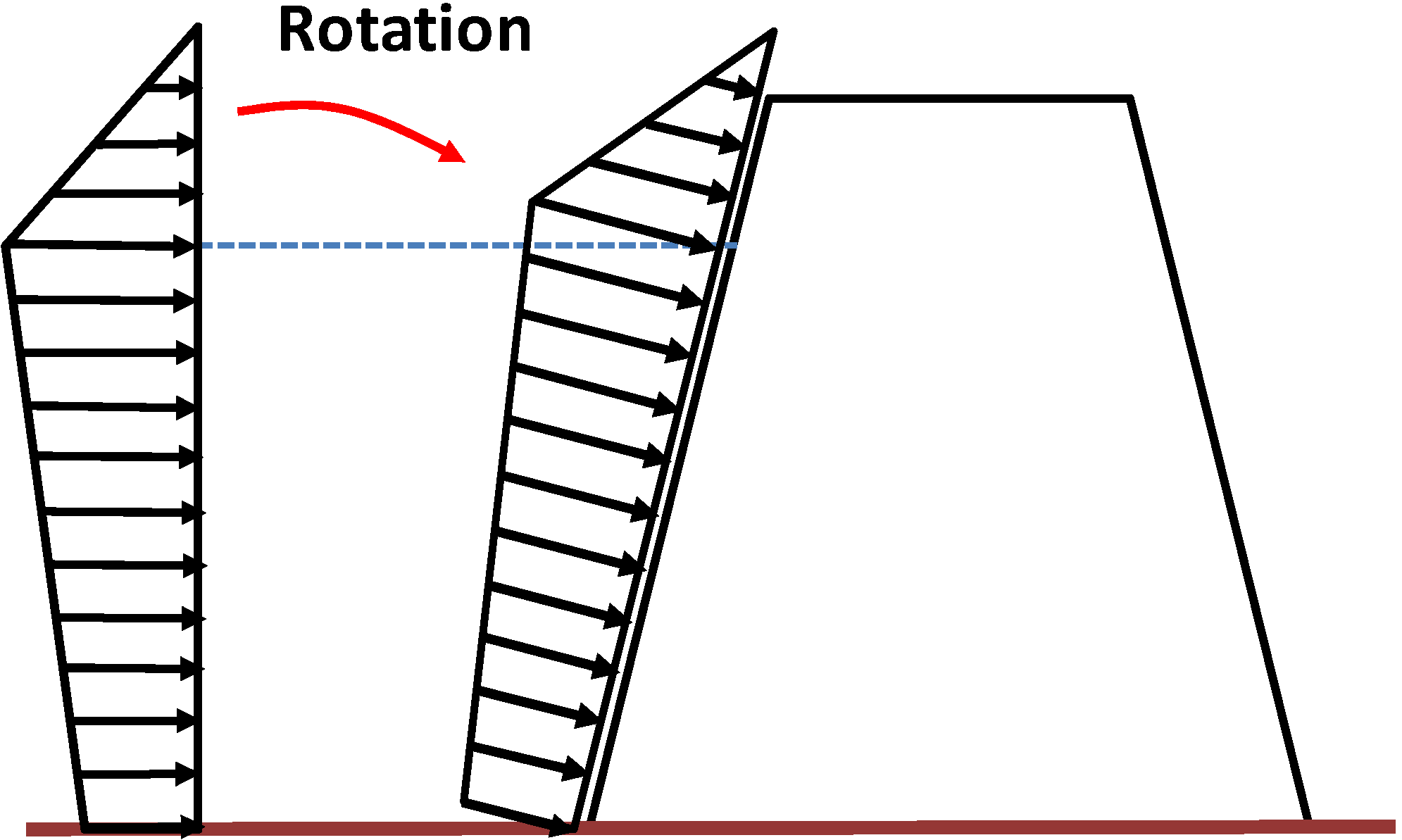
3.2. Sloping Top Caissons


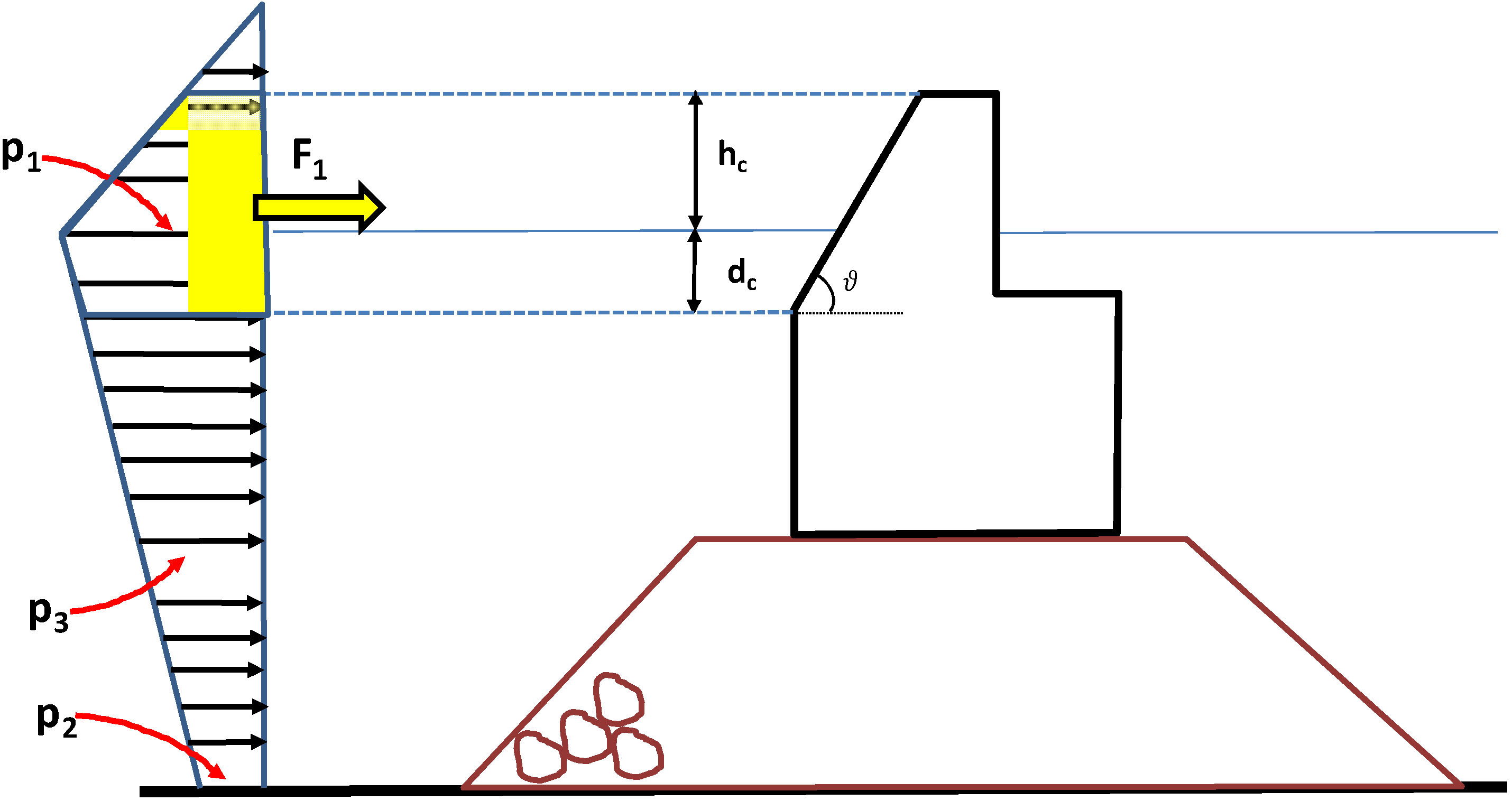
3.3. Trapezoidal Walls

3.4. Selection of Wave Parameters
4. Application to SSG
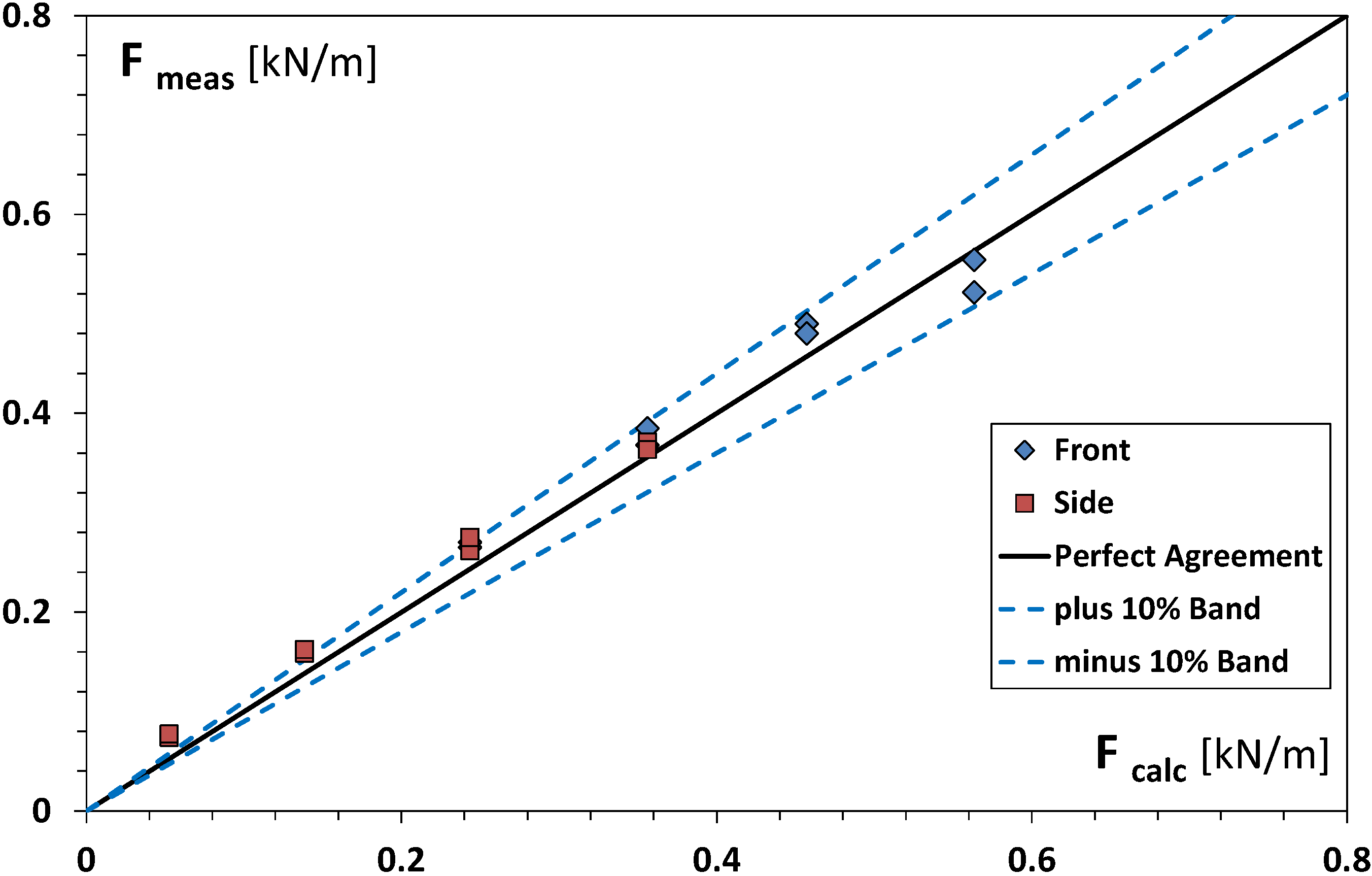
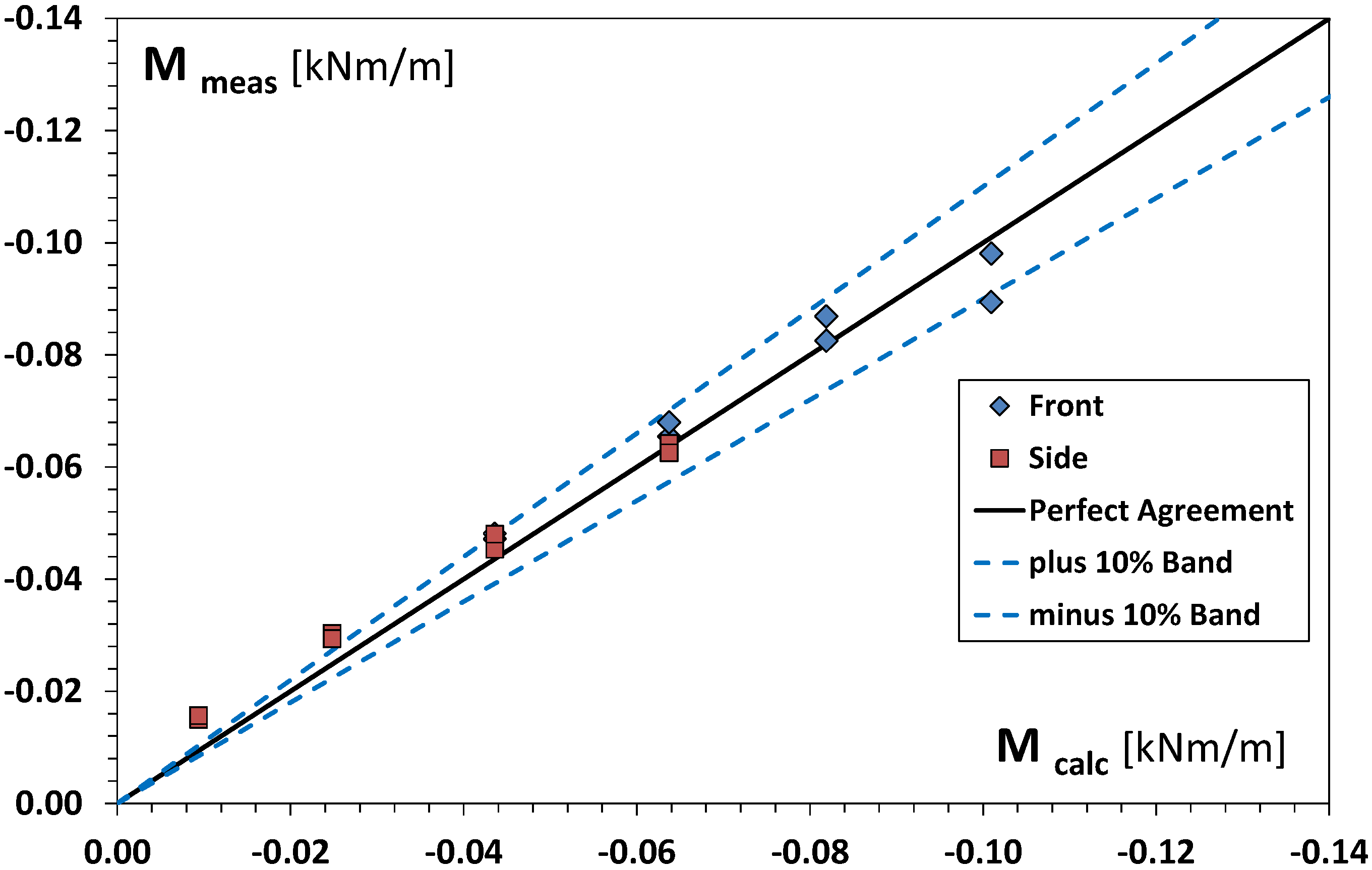
4.1. Definition of the Maximum Wave Force F1/250
4.2. How the Prediction Formulae Are Used
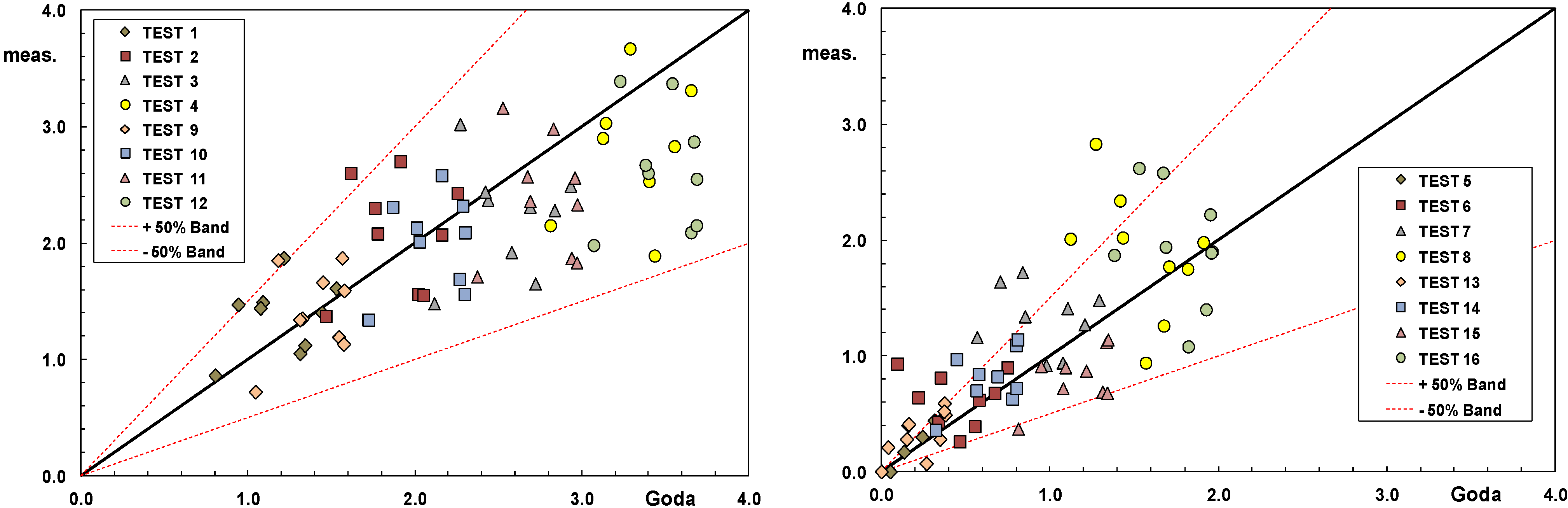
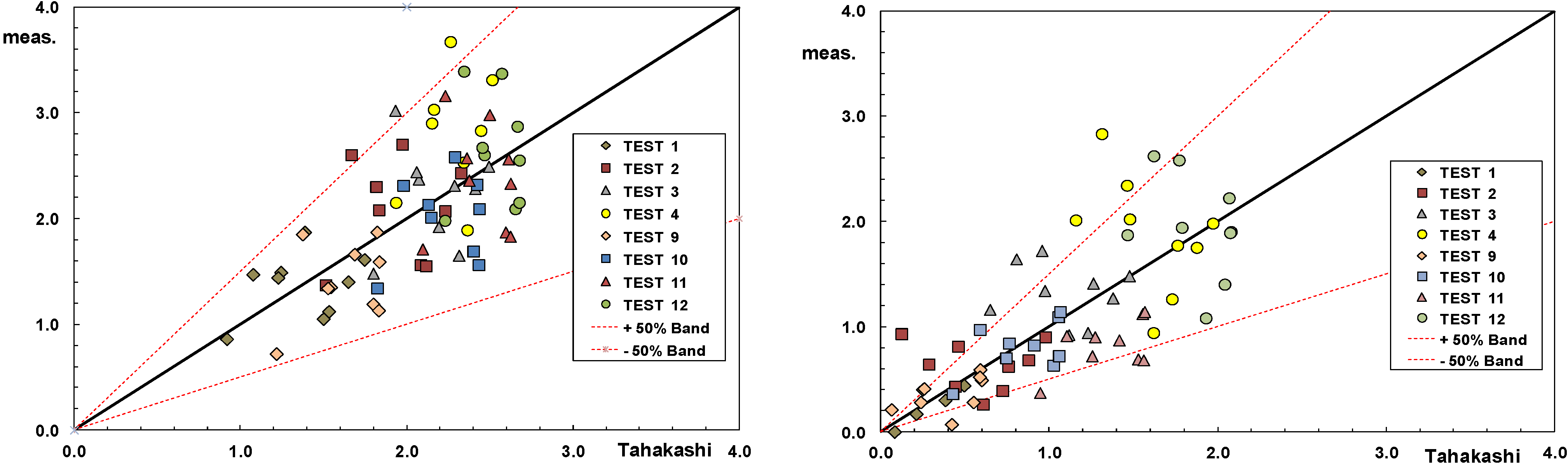
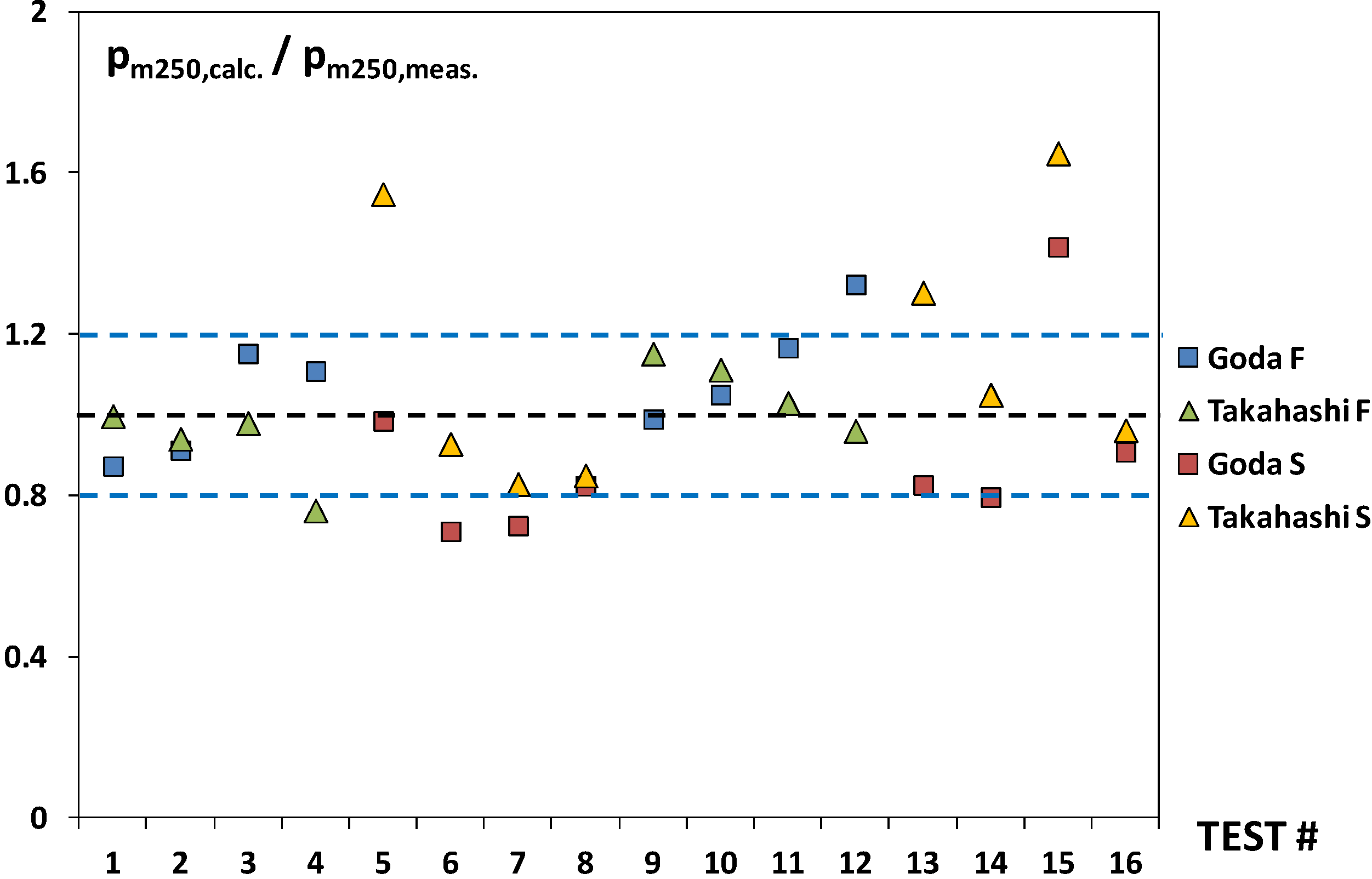
5. Results for Long Crested Waves
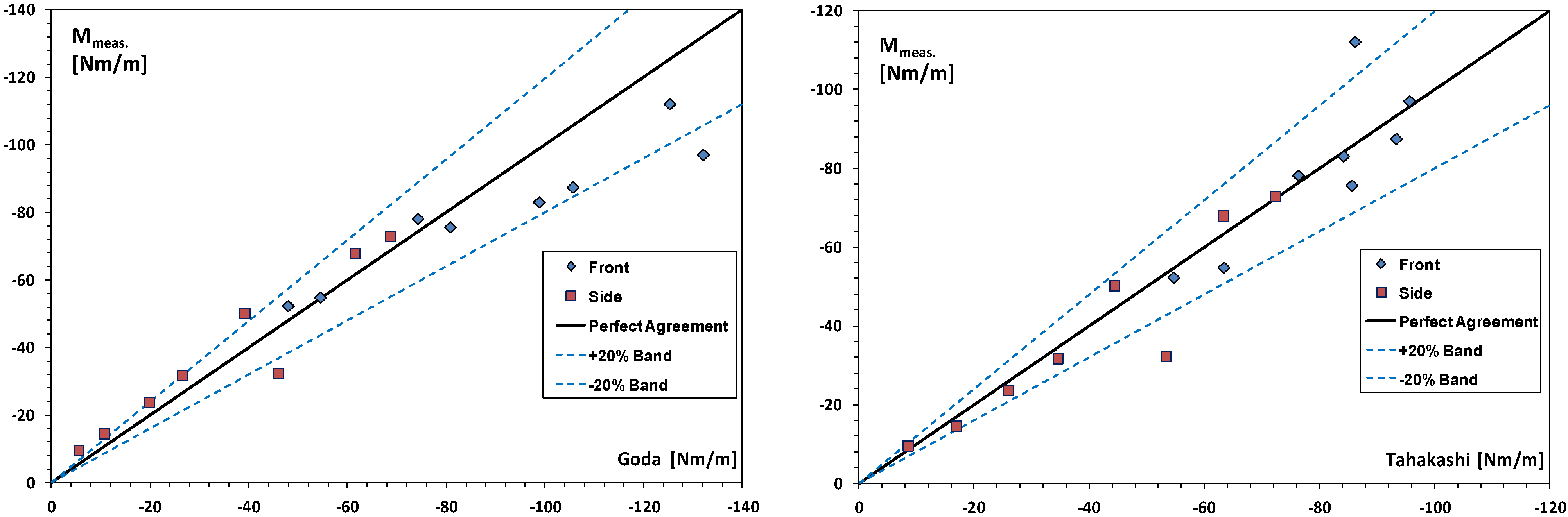
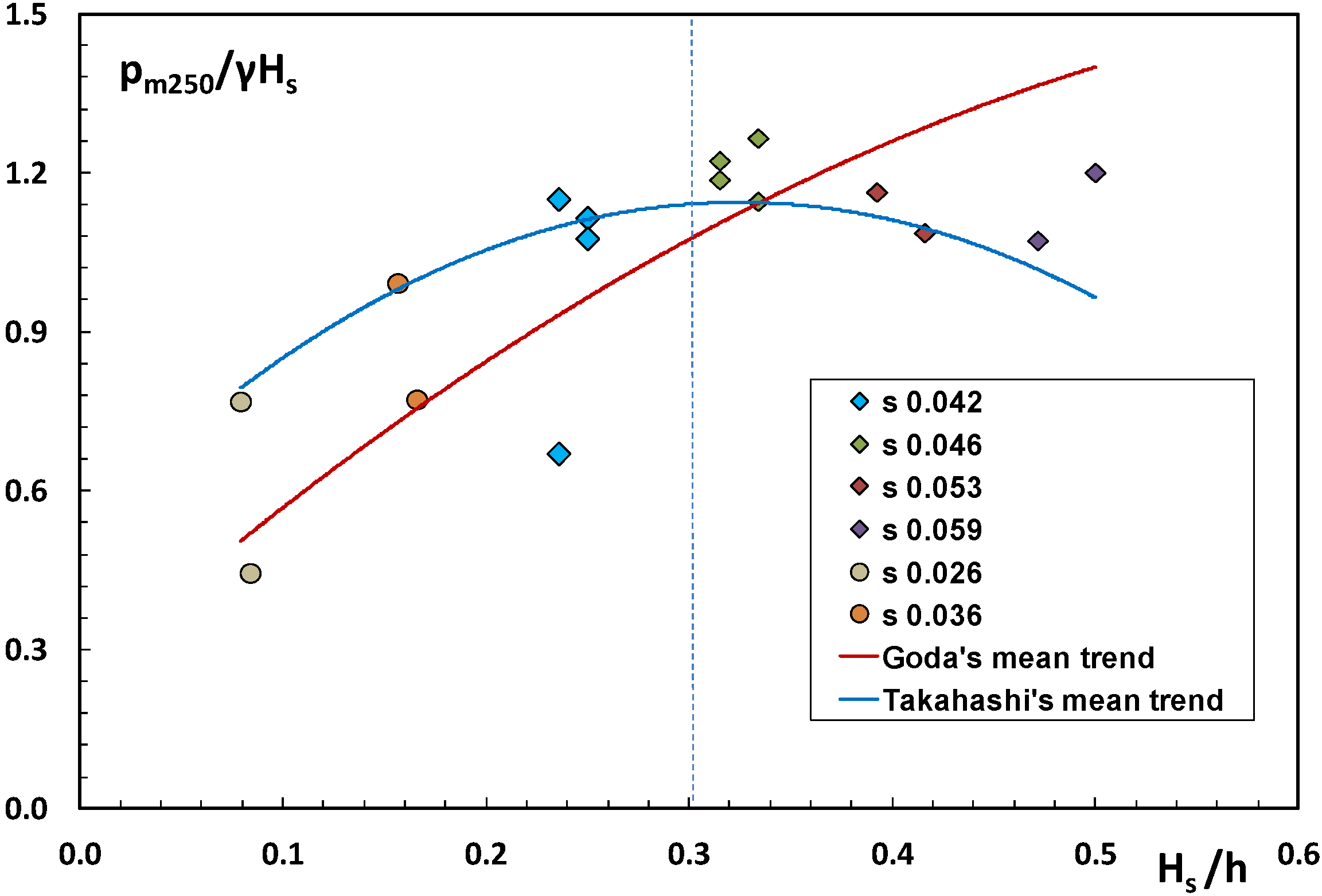
5.1. Goda and Takahashi et al.





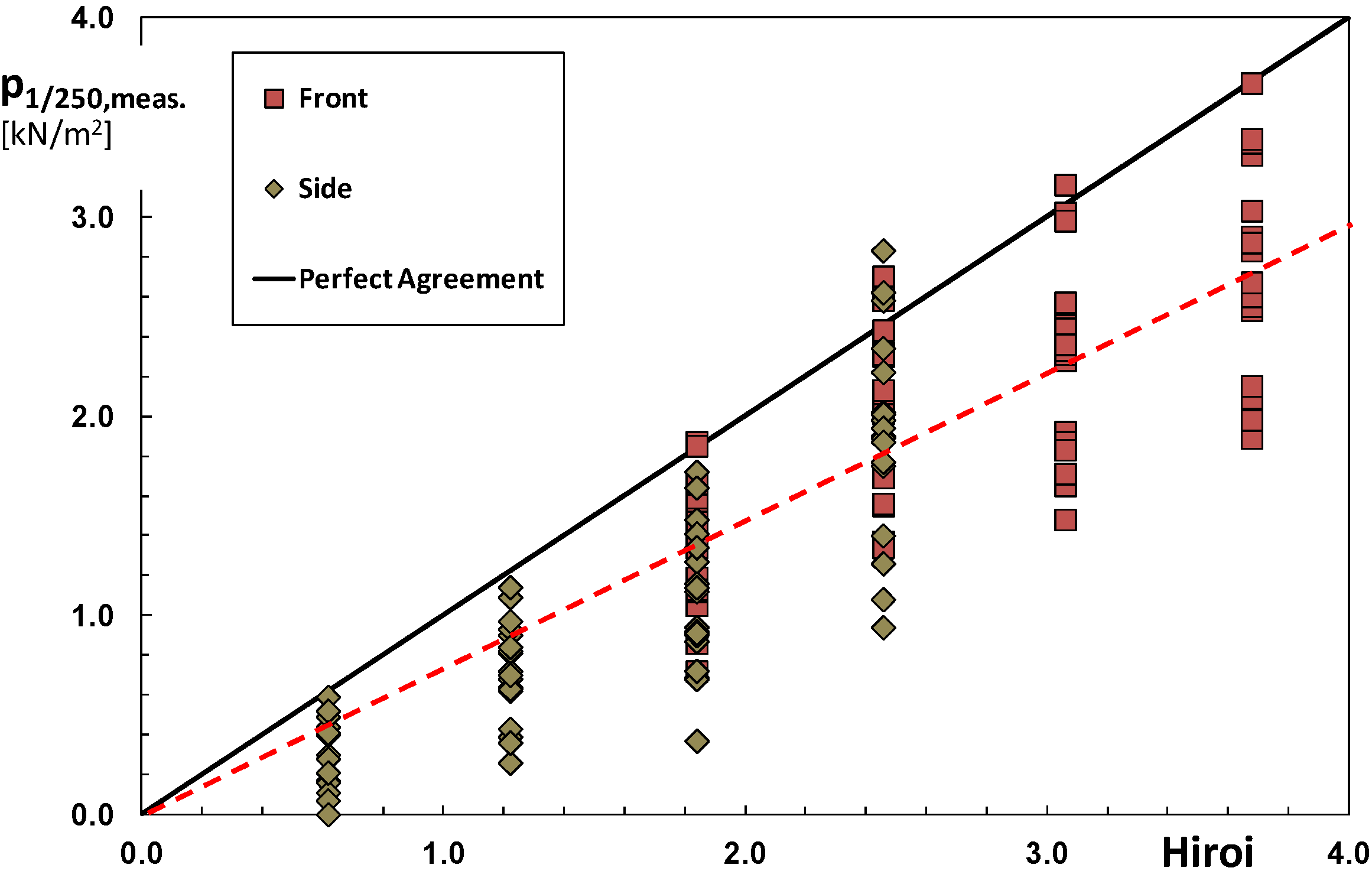
5.2. The Hiroi Formula


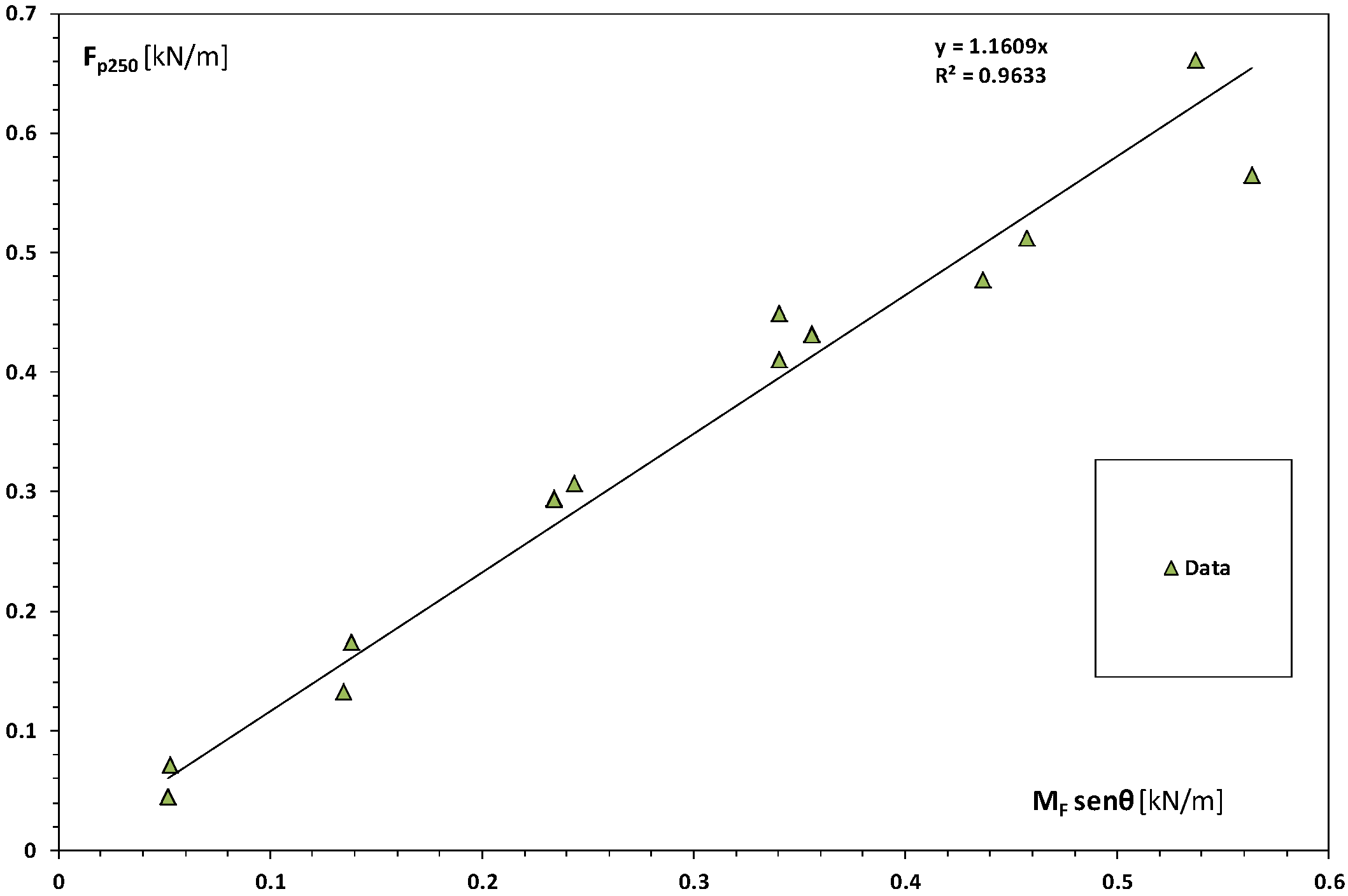
5.3. An Alternative Prediction Method
- the neglection of wave reflection;
- the hypothesis of narrow banded waves;
- the neglection of the phase lag among the pressure transducers when computing the measured force (Section 4.1)
- the neglection of the convective term in the expression of MF.



6. Short Crested Waves





6. Summary and Conclusions
Acknowledgments
References
- SSG Papers. Available online: http://vbn.aau.dk/da/publications/searchall.html?searchall=ssg (accessed on 24 January 2006).
- Kofoed, J.P. Wave Overtopping of Marine Structures—Utilization of Wave Energy. Ph. D. Thesis, Aalborg University, Aalborg, Denmark, 2002. [Google Scholar]
- Kofoed, J.P. Model testing of the wave energy converter Seawave Slot-Cone Generator. In Hydraulics and Coastal Engineering (No. 18); Department of Civil Engineering, Aalborg University: Aalborg, Denmark, 2005. [Google Scholar]
- Margheritini, L.; Vicinanza, D.; Frigaard, P. SSG wave energy converter: design, reliability and hydraulic performance of an innovative overtopping device. J. Renew. Energy 2009, 34, 1371–1380. [Google Scholar] [CrossRef]
- Vicinanza, D.; Margheritini, L.; Kofoed, J.P.; Buccino, M. The SSG wave energy converter: Performance, Status and Recent Developments. Energies 2012, 5, 193–226. [Google Scholar] [CrossRef]
- Vicinanza, D.; Frigaard, P. Wave pressure acting on a seawave slot-cone generator. Coast. Eng. 2008, 55, 553–568. [Google Scholar] [CrossRef]
- Hughes, S.A. Physical Models and Laboratory Techniques in Coastal Engineering; World Scientific Publishing: Singapore, 1993. [Google Scholar]
- Le Mèhautè, B. Similitude in Coastal Engineering. In Journal of Waterways, Harbors and Coastal Division, Proceedings of the American Society of Civil Engineers; American Society of Civil Engineers (ASCE): New York, NY, USA, 1976; Volume 102 (WW3), pp. 317–335. [Google Scholar]
- EurOTop: Wave Overtopping of Sea Defences and Related Structures: Assessment Manual; EA Environment Agency: Bristol, UK, August 2007; Available online: http://www.kennisbank-waterbouw.nl/DesignCodes/EurOtop.pdf (accessed on 16 November 2012).
- Cuomo, G.; Allsop, N.H.W.; Takahashi, S. Scaling of wave impact pressures on vertical walls. Coast. Eng. 2010, 57, 604–609. [Google Scholar] [CrossRef]
- Kofoed, J.P. Vertical Distribution of Wave Overtopping for Design of Multi Level Overtopping Based Wave Energy Converters. In Proceedings of the 30th International Conference on Coastal Engineering, San Diego, CA, USA, 3–8 September 2006.
- Van der Meer, J.W.; Janssen, J.P.F.M. Wave Run up and Wave Overtopping at Dikes; Technical Report, Task Committee Reports: Delft, The Netherlands, 2005. [Google Scholar]
- Franco, L.; de Gerloni, M.; van der Meer, J.W. Wave overtopping on vertical and composite breakwaters. In Proceedings of the 24th International Conference on Coastal Engineering, Kobe, Japan, 23–28 October 1994.
- Goda, Y. Japan’s design practice in assessing wave forces on vertical breakwaters. In Wave Forces on Inclined and Vertical Wall Structures; American Society of Civil Engineers (ASCE): New York, NY, USA, 1995; p. 402. [Google Scholar]
- Takahashi, S.; Tanimoto, K.; Simosako, K. A proposal of impulsive pressure coefficient for design of composite breakwaters. In Proceedings of International Conference on Hydro-Technical Engineering for Port and Harbor Construction; Port and Harbour Research Institute: Yokosuka, Japan, 1994. [Google Scholar]
- Takahashi, S.; Hosoyamada, S.; Yamamoto, S. Hydrodynamic characteristics of sloping top caissions. In Proceedings of International Conference on Hydro-Technical Engineering for Port and Harbour Construction; Port and Harbour Research Institute: Yokosuka, Japan, 1994. [Google Scholar]
- Morihira, M.; Kunita, O. Model experiments on hydraulic characteristics of sloped wall breakwater. Coast. Eng. Japan 1979, 26, 288–295. [Google Scholar]
- Tanimoto, K.; Kimura, K. A Hydraulic Experiment Study on Trapezoidal Caisson Breakwaters; Technical Note N.528; Port and Harbour Research Institute: Yokosuka, Japan, 1985. [Google Scholar]
- Goda, Y. Random Seas and Engineering Applications; University of Tokyo Press: Tokyo, Japan, 1986. [Google Scholar]
- Vicinanza, D.; Ciardulli, F.; Buccino, M.; Calabrese, M.; Kofoed, J.P. Wave loadings acting on an innovative breakwater for energy production. J. Coast. Res. 2011, 64, 608–612. [Google Scholar]
- Hughes, S.A. Estimation of wave run-up on smooth, impermeable slopes using the wave momentum flux parameter. Coast. Eng. 2004, 51, 1085–1104. [Google Scholar]
- Vicinanza, D.; Caceres, I.; Buccino, M.; Gironella, X.; Calabrese, M. Wave disturbance behind low-crested structures: Diffraction and overtopping effects. Coast. Eng. 2009, 56, 1176–1185. [Google Scholar]
- Battjes, J.A. Effects of short-crestedness on wave loads on long structures. J. Appl. Coast. Res. 1982, 4, 165–172. [Google Scholar]
- Allsop, N.W.H.; Calabrese, M. Impact loadings on vertical walls in directional seas. In Proceedings of the 26th International Conference on Coastal Engineering, Copenhagen, Denmark, 22–26 June 1998; Volume 2, pp. 2056–2068.
- Calabrese, M.; Allsop, N.W.H.; Buccino, M. Effect of Random Multidirectional Wave Fields on Wave Loads on Vertical and Composite Breakwaters. In Proceedings of the 27th International Conference on Coastal Engineering, Sydney, Australia, 16–21 July 2000; Volume 2, pp. 1710–1723.
- Boccotti, P. Wave Mechanics for Ocean Engineering; Elsevier Oceanography Series: Amsterdam, The Netherlands, 2000. [Google Scholar]
© 2012 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Buccino, M.; Banfi, D.; Vicinanza, D.; Calabrese, M.; Giudice, G.D.; Carravetta, A. Non Breaking Wave Forces at the Front Face of Seawave Slotcone Generators. Energies 2012, 5, 4779-4803. https://doi.org/10.3390/en5114779
Buccino M, Banfi D, Vicinanza D, Calabrese M, Giudice GD, Carravetta A. Non Breaking Wave Forces at the Front Face of Seawave Slotcone Generators. Energies. 2012; 5(11):4779-4803. https://doi.org/10.3390/en5114779
Chicago/Turabian StyleBuccino, Mariano, Davide Banfi, Diego Vicinanza, Mario Calabrese, Giuseppe Del Giudice, and Armando Carravetta. 2012. "Non Breaking Wave Forces at the Front Face of Seawave Slotcone Generators" Energies 5, no. 11: 4779-4803. https://doi.org/10.3390/en5114779
APA StyleBuccino, M., Banfi, D., Vicinanza, D., Calabrese, M., Giudice, G. D., & Carravetta, A. (2012). Non Breaking Wave Forces at the Front Face of Seawave Slotcone Generators. Energies, 5(11), 4779-4803. https://doi.org/10.3390/en5114779