Intelligent Control of Battery Energy Storage for Multi-Agent Based Microgrid Energy Management


Abstract
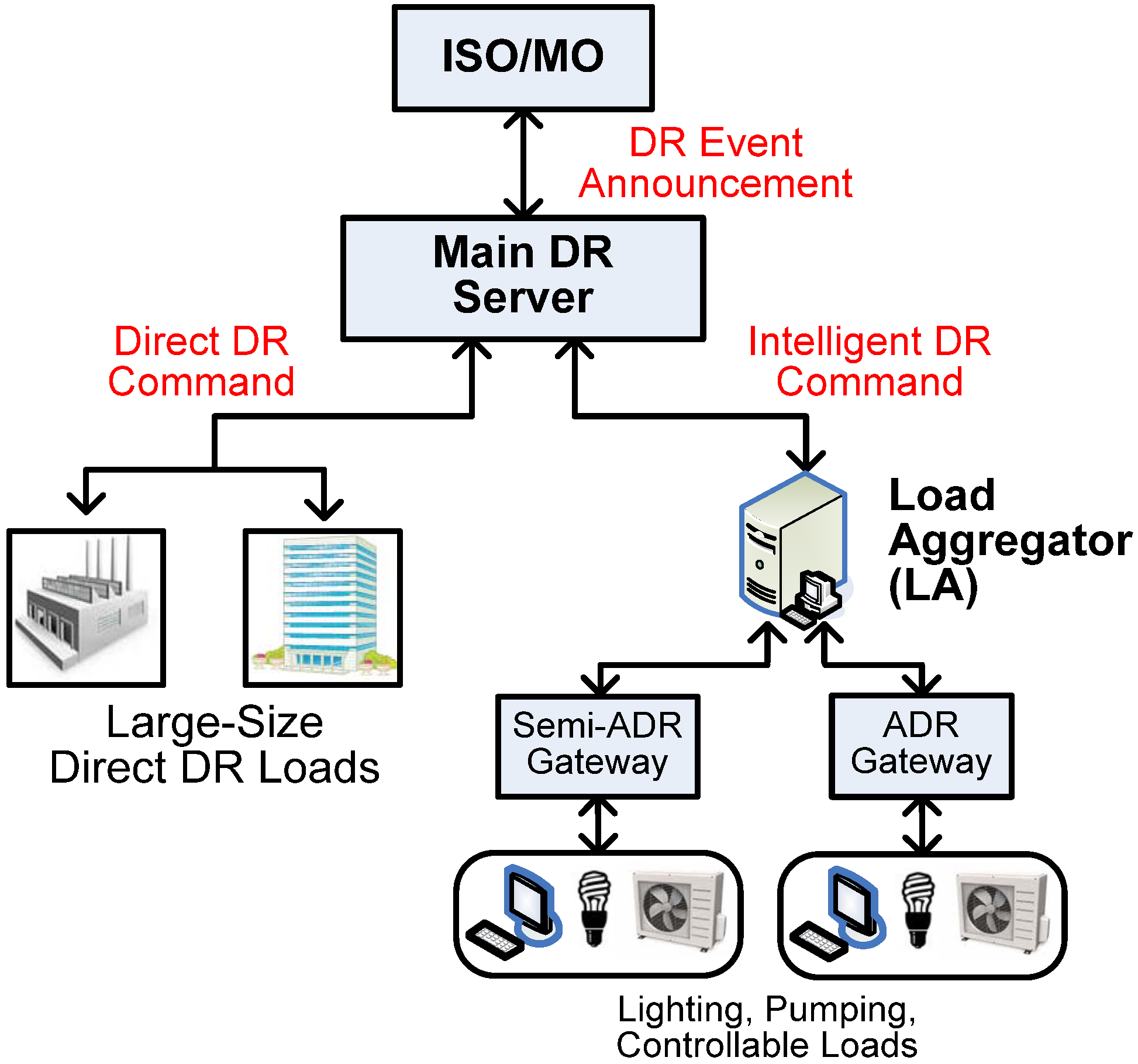
:1. Introduction
2. Microgrid Model
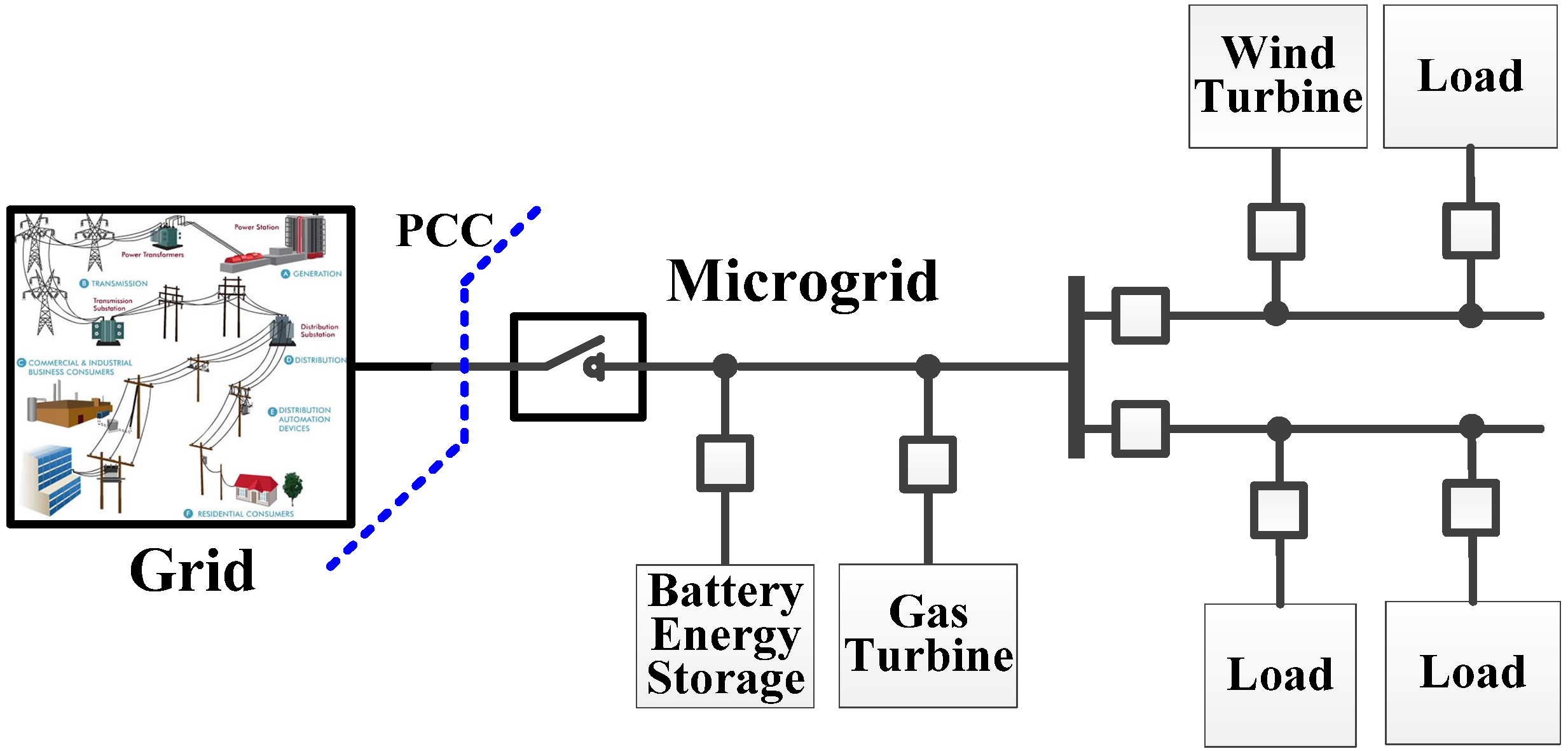
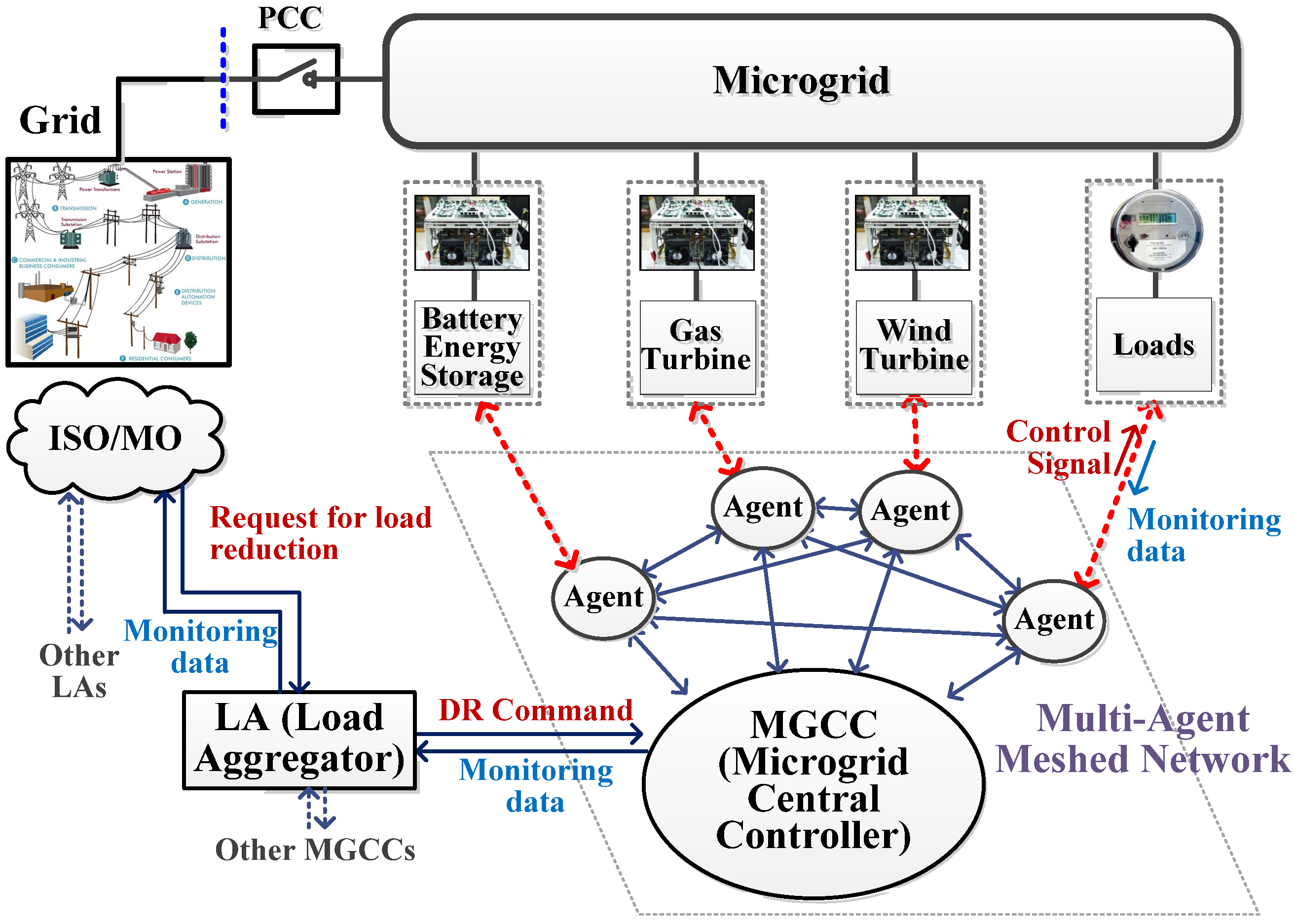
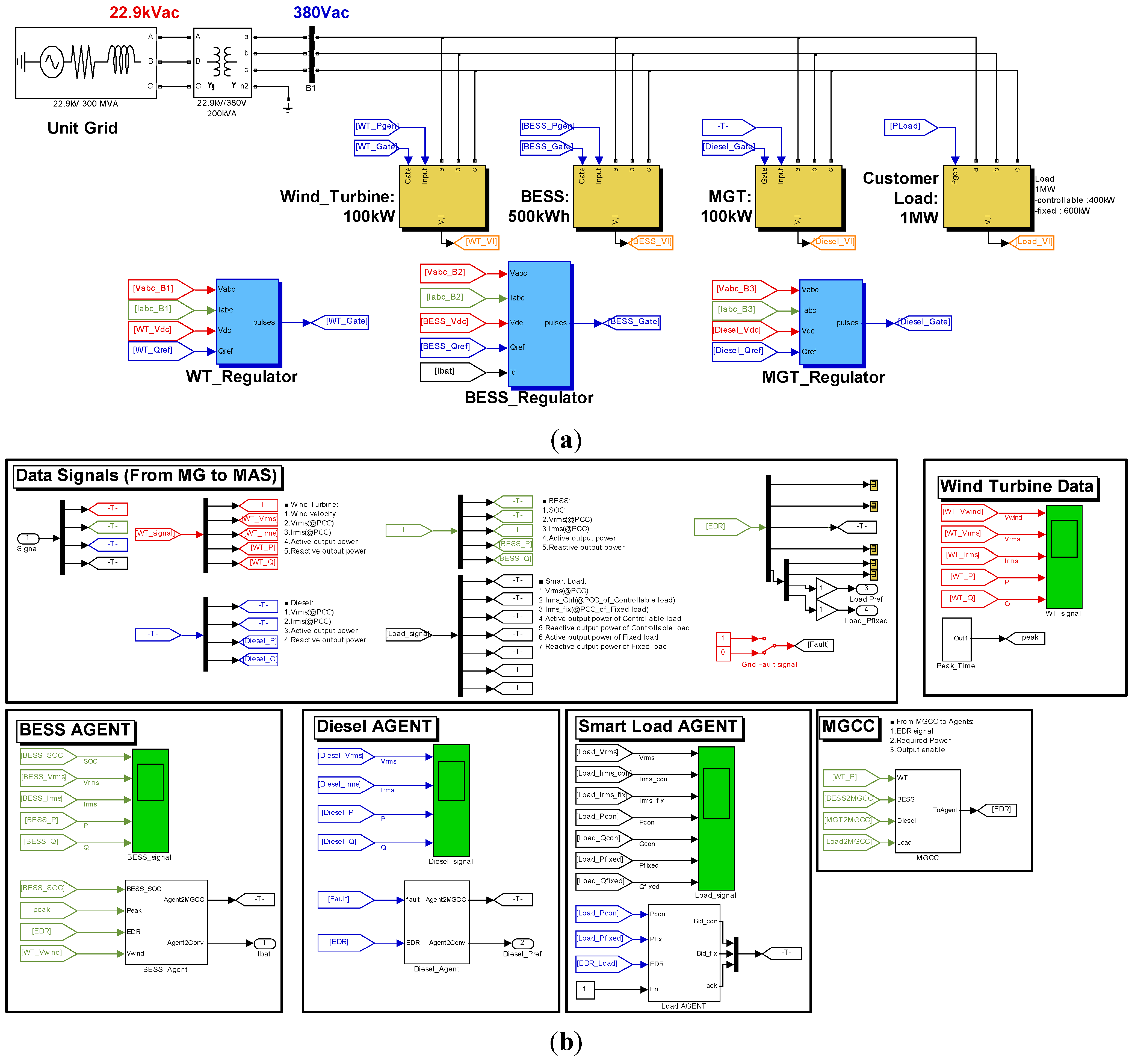
2.1. Microgrid Configuration


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Entity | Rating | Configuration |
|---|---|---|
| Wind Power System | 100 kW | PMSG with a full-scale three-level converter |
| BESS | 500 kWh | Li-ion battery model with non-isolated bi-directional boost converter and three-level converter |
| Micro Gas Turbine | 100 kW | Back-up generation for emergency conditions |
| Load | 1 MW (peak) | Critical load: 600 kW (peak), Controllable load: 400 kW (peak) |
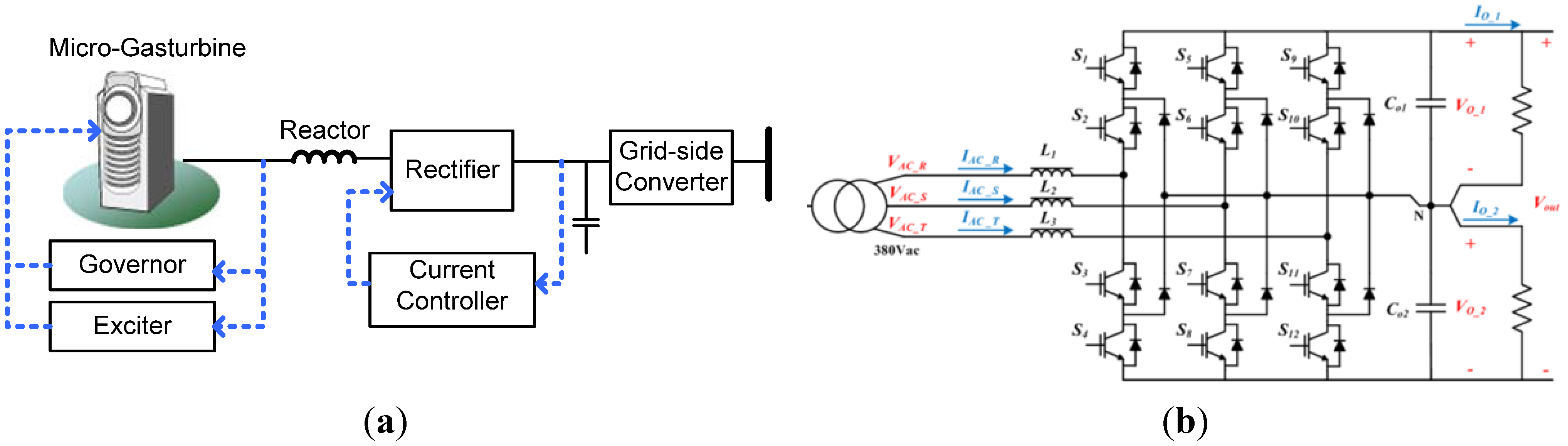
2.2. Microgrid Gas Turbine

2.3. Battery Energy Storage Model

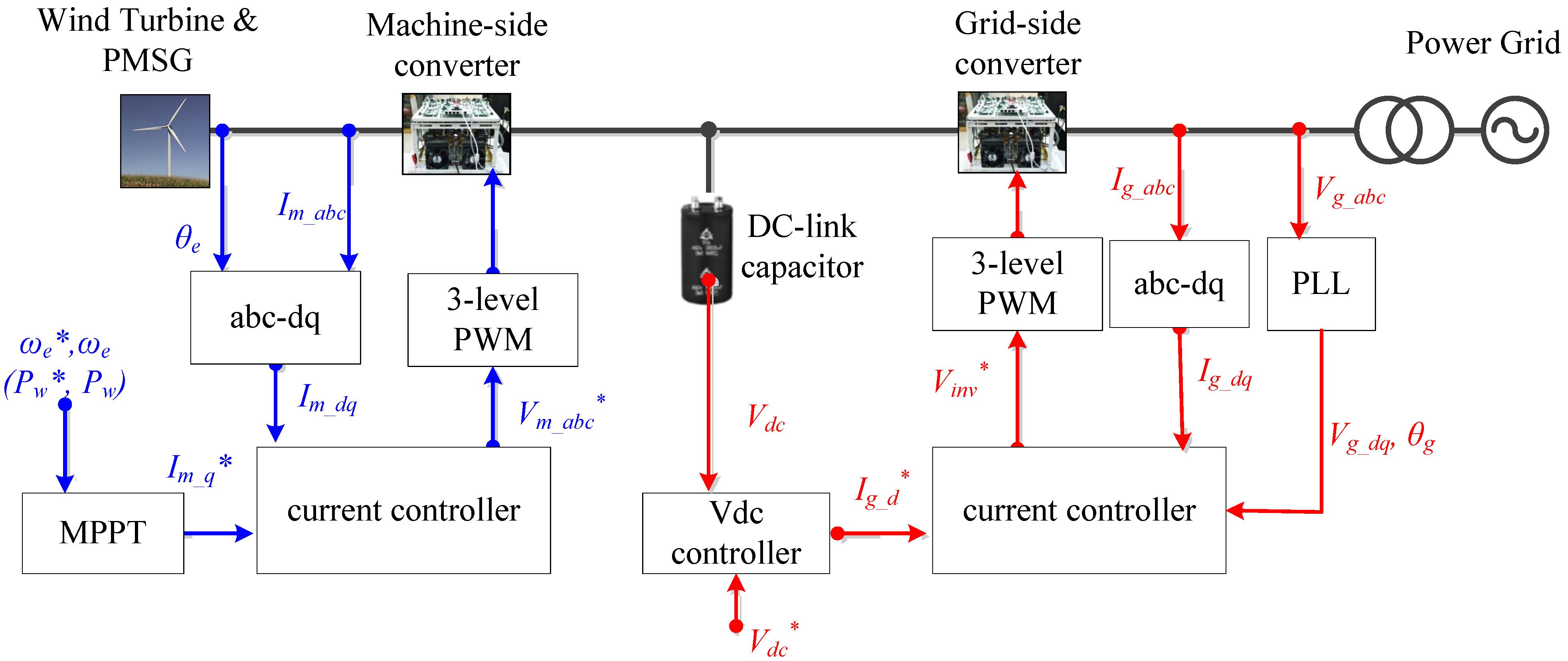
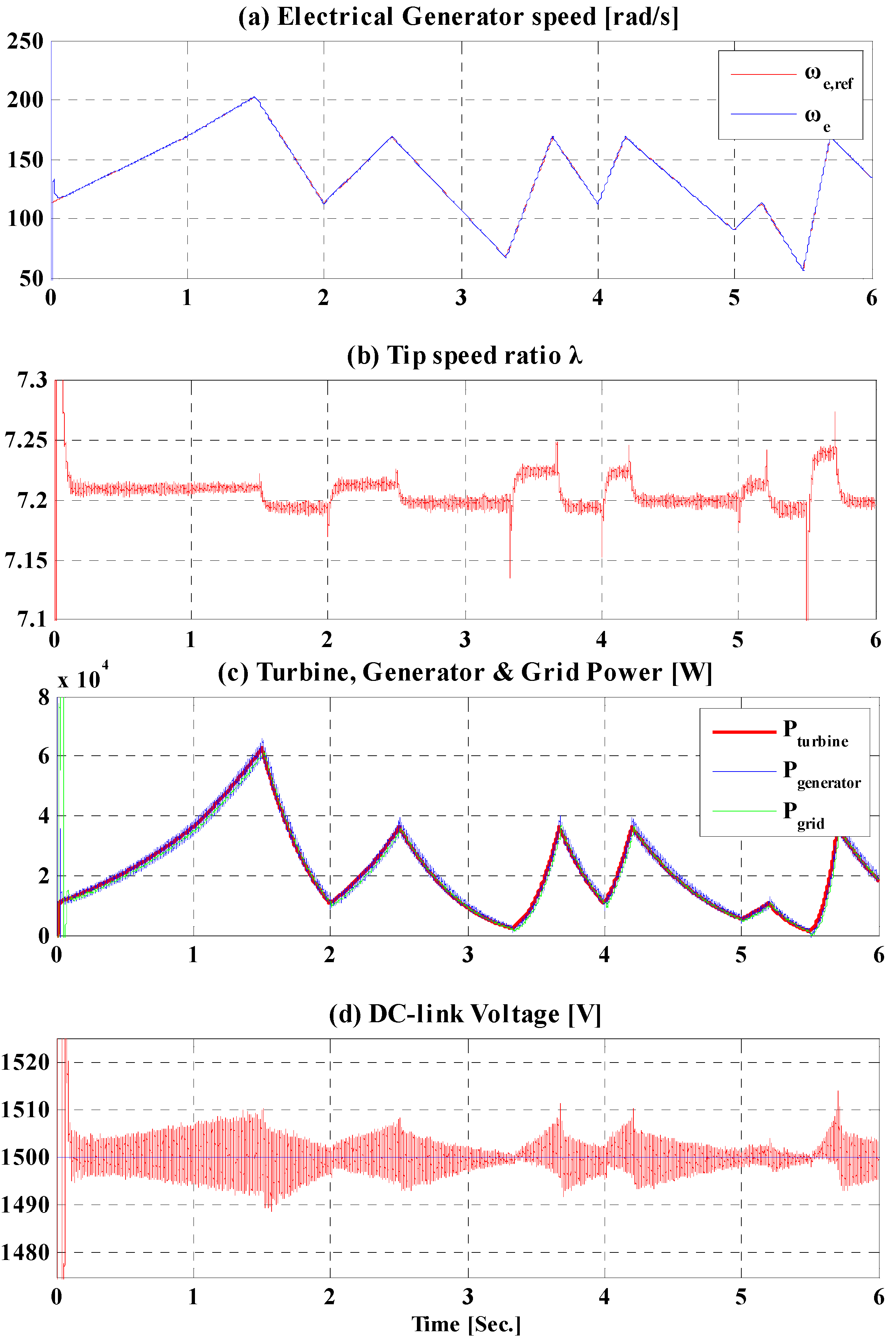
2.4. Wind Turbine Model


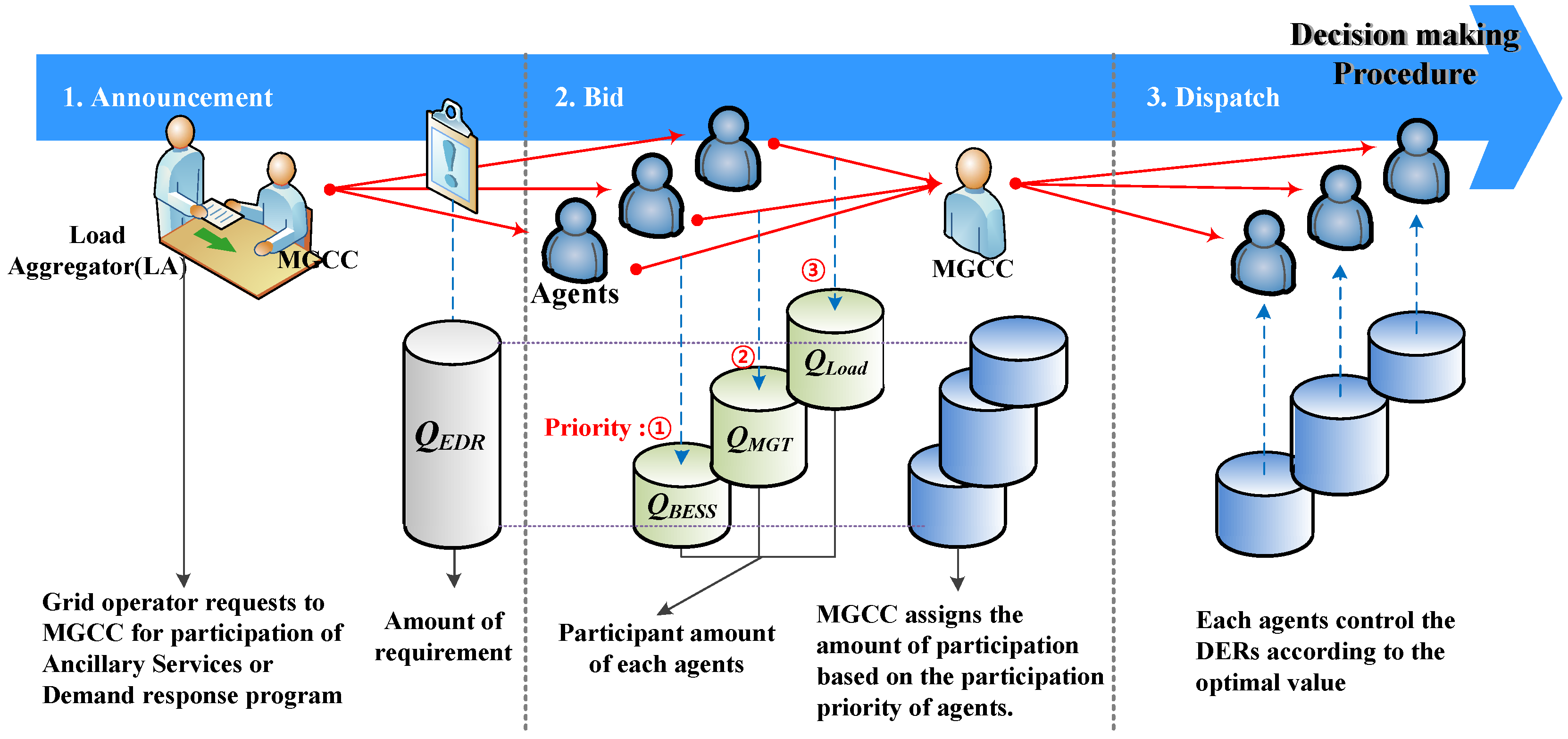
3. Multi-Agent Based Energy Management for Demand Response Program
3.1. Emergency Demand Response Program

- ✓
- Prompt decision-making process
- ✓
- Open and flexible control platform for diverse entities
- ✓
- Intelligent algorithms for optimal operation of each entity
- ✓
- Reliable DR operation with multiple back-up plans against uncertainties
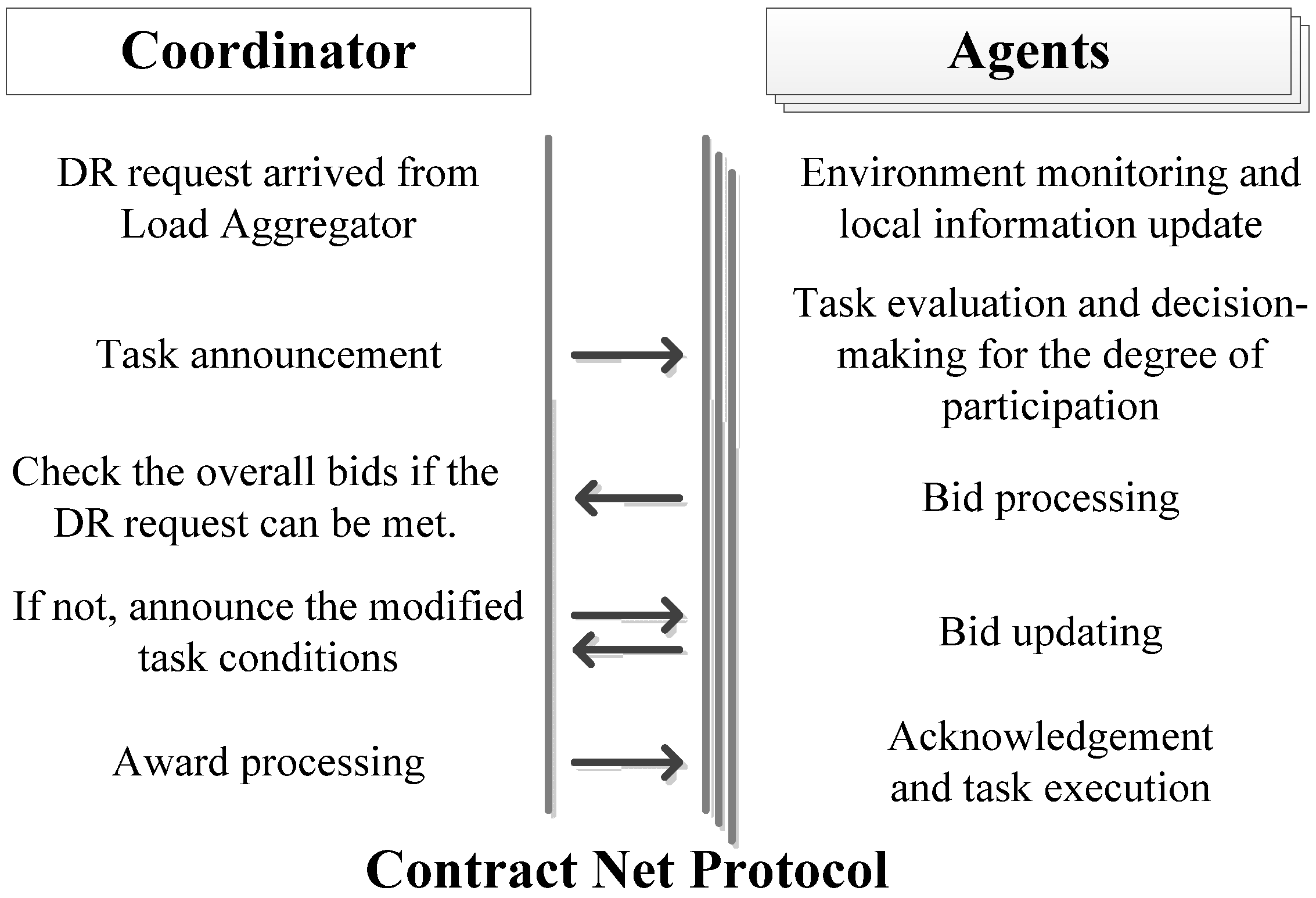
3.2. Multi-Agent Based Microgrid Energy Management


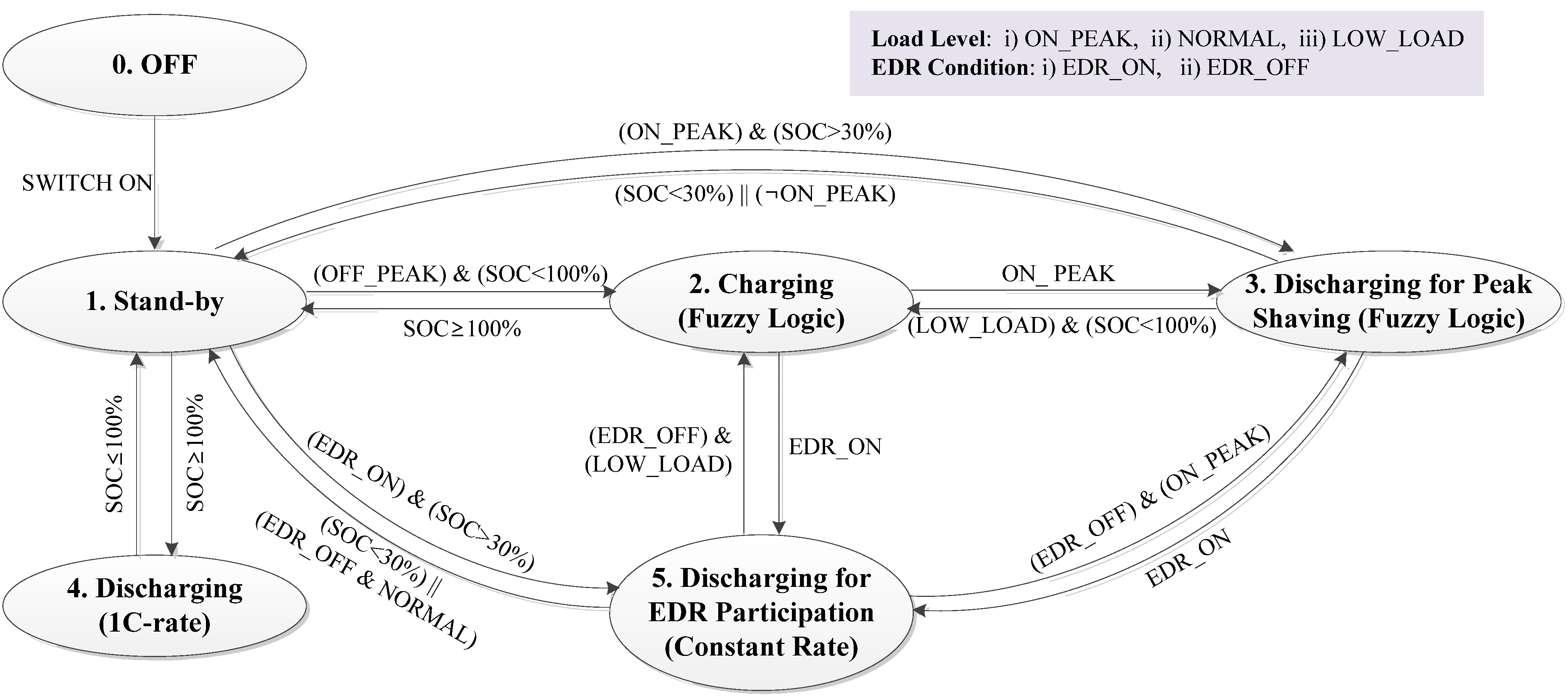
3.3. Battery Agent
- ✓
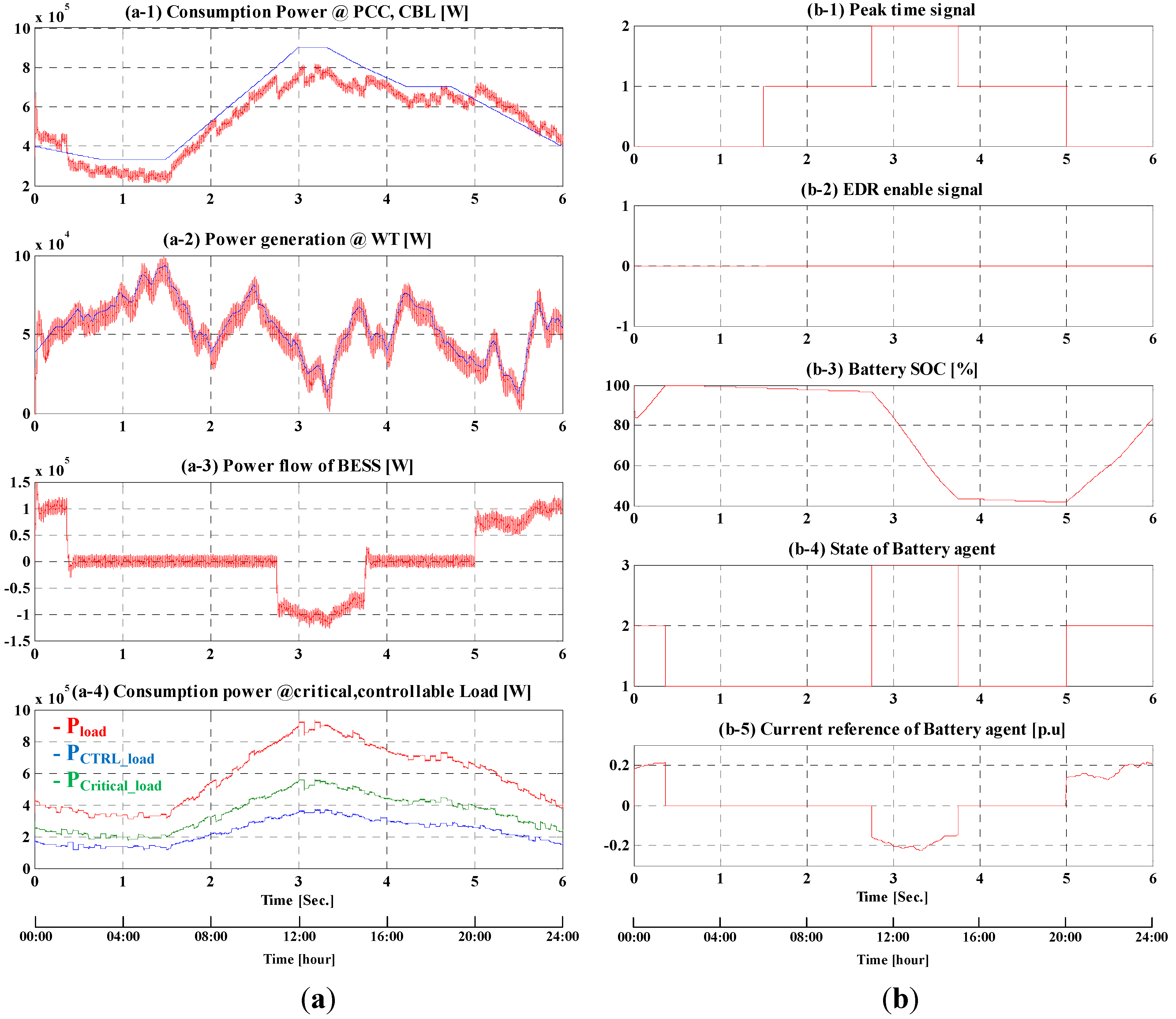
- To keep the battery SOC (State of charge) between 30 % and 100%.
- ✓
- To support the power generation during peak loading period or EDR event.
- ✓
- State “0”: The BESS turns off.
- ✓
- State “1”: The BESS turns the power on and stands by.
- ✓
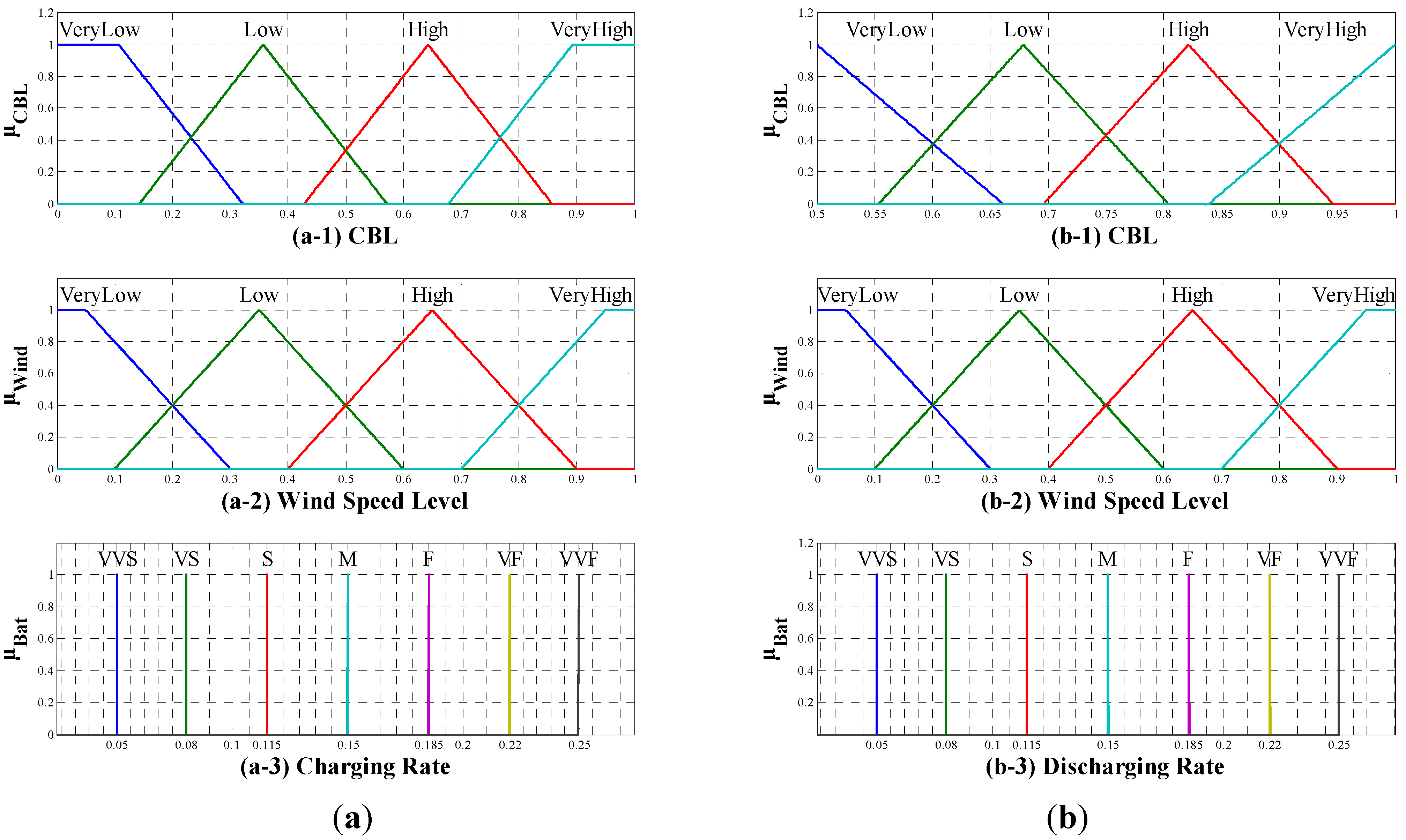
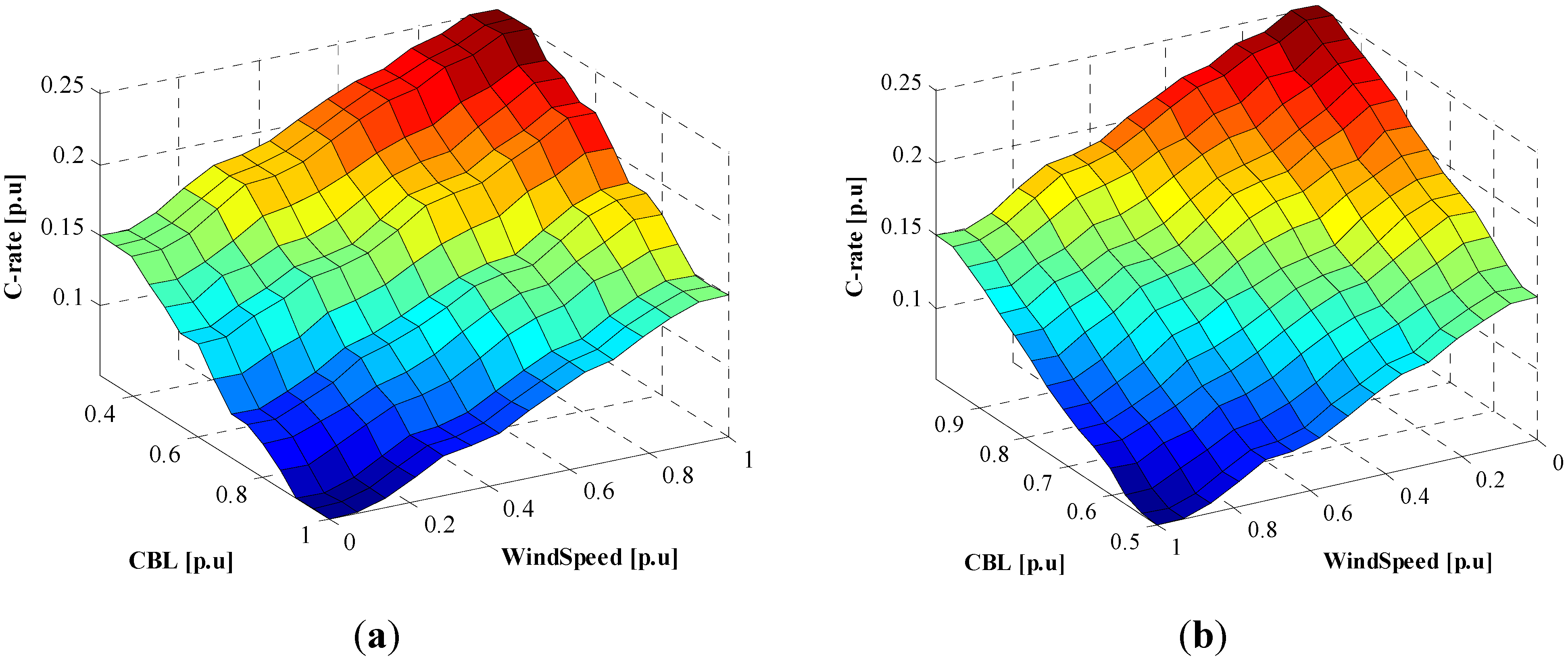
- State “2”: The BESS charges the battery according to a fuzzy logic.
- ✓
- State “3”: The BESS discharges the battery according to a fuzzy logic during the peak loading condition.
- ✓
- State “4”: When the battery is overcharged (>100%), the BESS discharges the battery at a constant rate.
- ✓
- State “5”: In the EDR event, the battery is discharged at a constant rate.

| CBLWind Speed | VL | L | H | VH |
|---|---|---|---|---|
| VL | M | F | VF | VVF |
| L | S | M | F | VF |
| H | VS | S | M | F |
| VH | VVS | VS | S | M |

| CBLWind speed | VL | L | H | VH |
|---|---|---|---|---|
| VL | M | S | VS | VVS |
| L | F | M | S | VS |
| H | VF | F | M | S |
| VH | VVF | VF | F | M |

3.4. MGT (Micro Gas Turbine) Agent
3.5. Load Agent
4. Simulation Studies

4.1. Case 1: Normal Operation

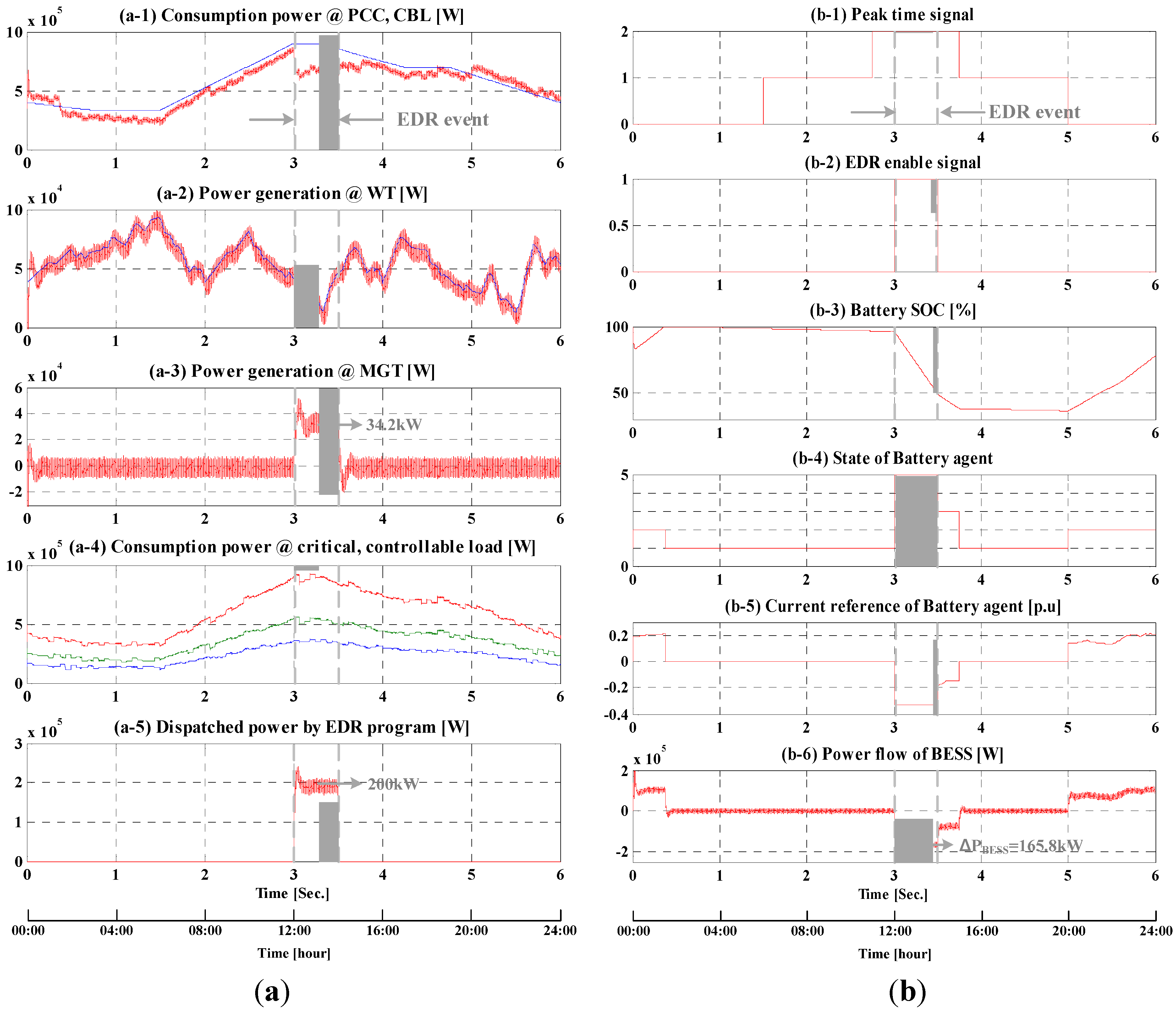
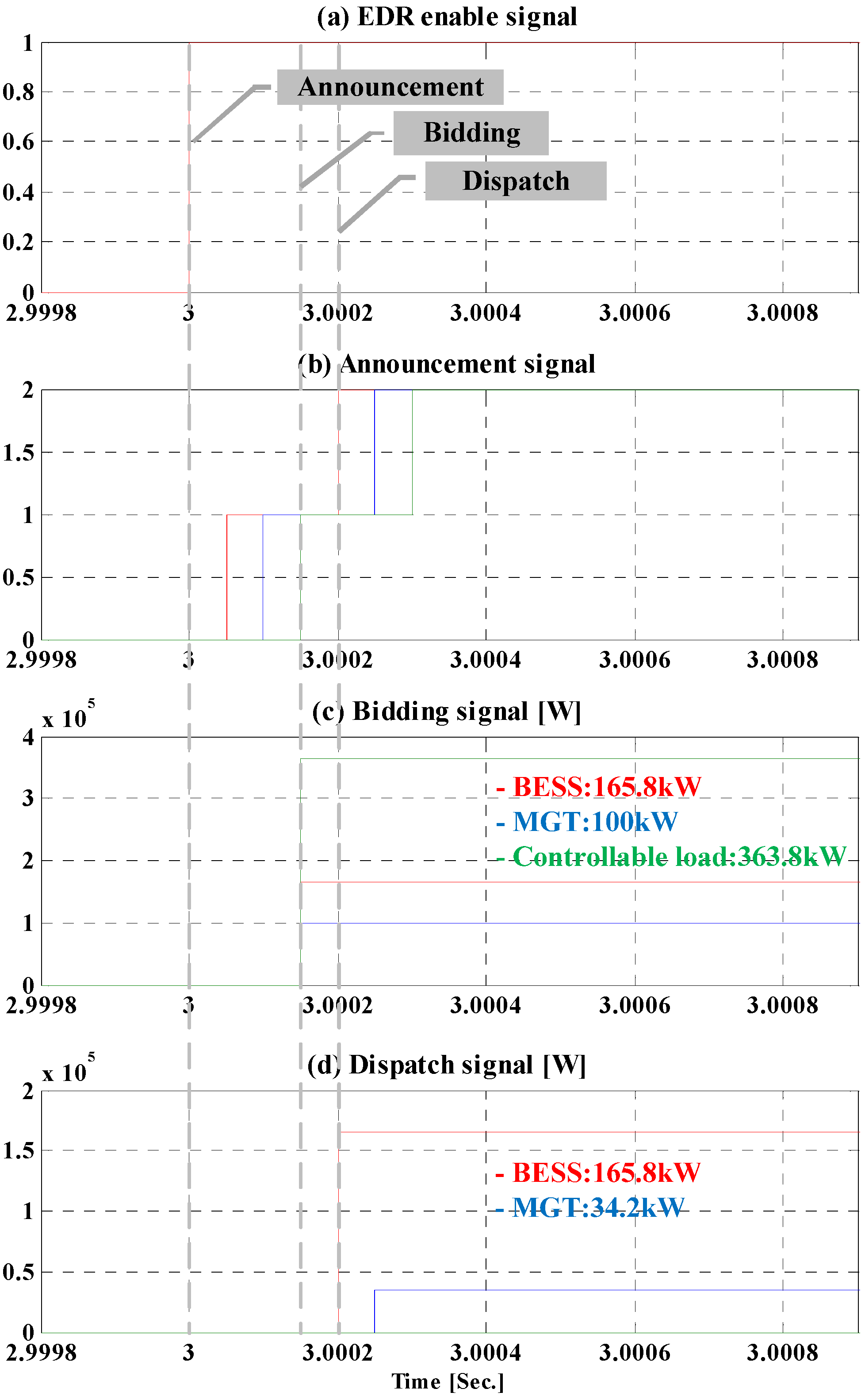
4.2. Case 2: EDR Event (Emergent Demand Reduction: 200 kW)



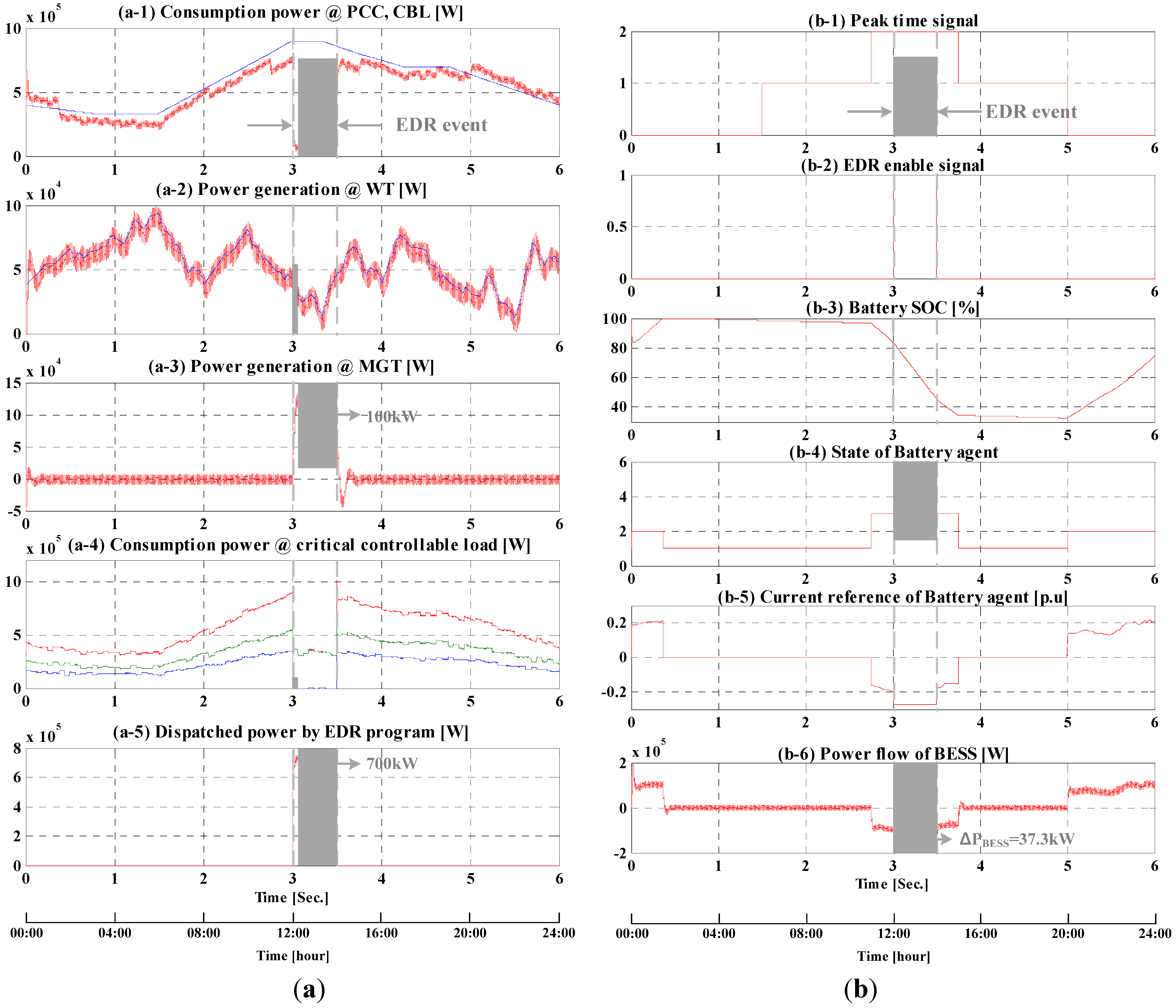
4.3. Case 3: EDR Event (Emergent Demand Reduction: 700 kW)


5. Conclusions
Acknowledgments
Conflicts of Interest
References
- Chowdhury, S.; Chowdhury, S.P.; Crossley, P. Microgrids and Active Distribution Networks; The Institution of Engineering and Technology (IET): London, UK, 2009. [Google Scholar]
- Hatziargyriou, N.; Asano, H.; Iravani, R.; Marnay, C. Microgrids. IEEE Power Energy Mag. 2007, 5, 78–94. [Google Scholar] [CrossRef]
- Kang, H.; Yoo, C.; Chung, I.; Won, D.; Moon, S. Intelligent coordination method of multiple distributed resources for harmonic current compensation in a microgrid. J. Electr. Eng. Technol. 2012, 7, 834–844. [Google Scholar] [CrossRef]
- Chung, I.; Liu, W.; Cartes, D.; Collins, E.; Moon, S. Control methods for multiple distributed generators in a microgrid system. IEEE Trans. Ind. Appl. 2010, 46, 1078–1088. [Google Scholar] [CrossRef]
- Kim, J.; Nam, Y.; Hahn, T.; Hong, H. Demand Response Program Implementation Practices in Korea. In Proceedings of the 18th IFAC World Congress, Milano, Italy, 28 August–2 September 2011.
- Yoo, T.; Kwon, H.; Lee, H.; Rhee, C.; Yoon, Y.; Park, J. Development of Reliability Based Demand Response Program in Korea. In Proceedings of the IEEE PES Innovative Smart Grid Technologies, Anaheim, CA, USA, 17–19 January 2011.
- Teleke, S.; Baran, M.E.; Bhattacharya, S.; Huang, A.Q. Rule-based control of battery energy storage for dispatching intermittent renewable sources. IEEE Trans. Sustain. Energy 2010, 1, 117–124. [Google Scholar] [CrossRef]
- Lagorse, J.; Simoes, M.; Miraoui, A. A multiagent fuzzy-logic-based energy management of hybrid systems. IEEE Trans. Ind. Appl. 2009, 45, 2123–2129. [Google Scholar] [CrossRef]
- Ackermann, T. Wind Power in Power Systems; John Wiley & Sons: Chichester, UK, 2005. [Google Scholar]
- Albadi, M.H.; El-Saadany, E.F. Demand Response in Electricity Markets: An Overview. In Proceedings of the 2007 IEEE Power Engineering Society General Meeting, Tampa, FL, USA, 24–28 June 2007; pp. 1–5.
- Aalami, H.; Yousefi, G.R.; Moghadam, M.P. Demand Response Model Considering EDRP and TOU Programs. In Proceedings of the Transmission and Distribution Conference and Exposition, Chicago, IL, USA, 21–24 April 2008; pp. 1–6.
- Teodorescu, R.; Liserre, M.; Rodriguez, P. Grid Converters for Photovoltaic and Wind Power Systems; Wiley: Chichester, UK, 2011. [Google Scholar]
- Wooldridge, M. An Introduction to Multiagent Systems; John Wiley and Sons: Chichester, UK, 2009. [Google Scholar]
- Lagorse, J.; Paire, D.; Miraoui, A. A multi-agent system for energy management of distributed power sources. Renew. Energy 2010, 35, 174–182. [Google Scholar] [CrossRef]
- Logenthiran, T.; Srinivasan, D.; Khambadkone, A.M. Multi-agent system for energy resource scheduling of integrated microgrids in a distributed system. Electr. Power Syst. Res. 2011, 81, 138–148. [Google Scholar] [CrossRef]
- Kim, H.; Kinoshita, T. A multiagent system for microgrid operation in the grid-connected mode. J. Electr. Eng. Technol. 2010, 5, 246–254. [Google Scholar] [CrossRef]
- Yoo, C.; Choi, W.; Chung, I.; Won, D.; Hong, S.; Jang, B. Hardware-in-the-Loop Simulation of DC Microgrid with Multi-Agent System for Emergency Demand Response. In Proceedings of the IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 22–27 July 2012; pp. 1–6.
- Oh, S.; Yoo, C.; Chung, I.; Won, D. Hardware-in-the-loop simulation of distributed intelligent energy management system for microgrids. Energies 2013, 6, 3263–3283. [Google Scholar] [CrossRef]
© 2013 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Yoo, C.-H.; Chung, I.-Y.; Lee, H.-J.; Hong, S.-S. Intelligent Control of Battery Energy Storage for Multi-Agent Based Microgrid Energy Management. Energies 2013, 6, 4956-4979. https://doi.org/10.3390/en6104956
Yoo C-H, Chung I-Y, Lee H-J, Hong S-S. Intelligent Control of Battery Energy Storage for Multi-Agent Based Microgrid Energy Management. Energies. 2013; 6(10):4956-4979. https://doi.org/10.3390/en6104956
Chicago/Turabian StyleYoo, Cheol-Hee, Il-Yop Chung, Hak-Ju Lee, and Sung-Soo Hong. 2013. "Intelligent Control of Battery Energy Storage for Multi-Agent Based Microgrid Energy Management" Energies 6, no. 10: 4956-4979. https://doi.org/10.3390/en6104956
APA StyleYoo, C. -H., Chung, I. -Y., Lee, H. -J., & Hong, S. -S. (2013). Intelligent Control of Battery Energy Storage for Multi-Agent Based Microgrid Energy Management. Energies, 6(10), 4956-4979. https://doi.org/10.3390/en6104956