2.1. Winding Arrangements and Feasible Slot/Pole Combinations
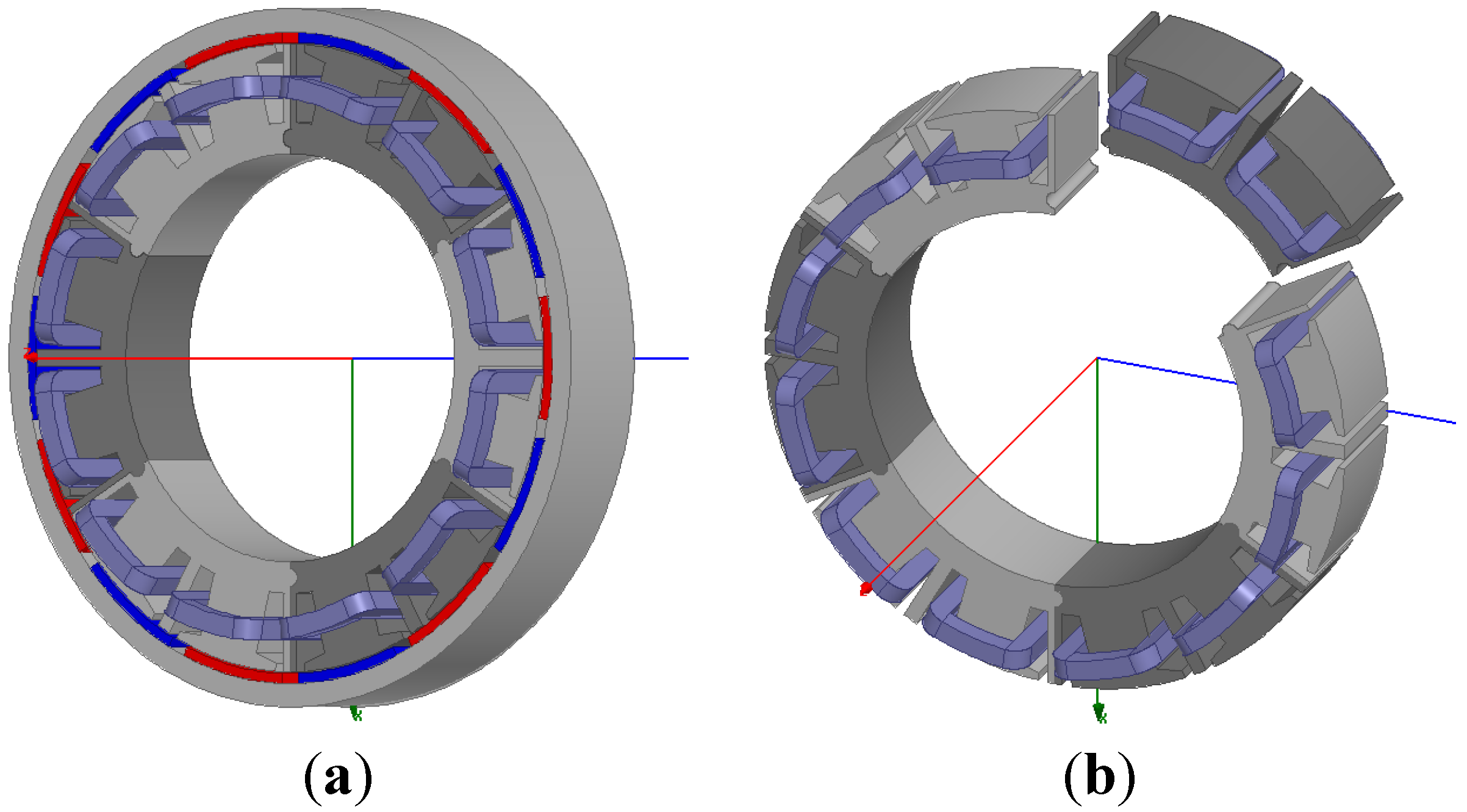
On winding phase belt level, there are two schemes for the six-phase permanent magnet machines,
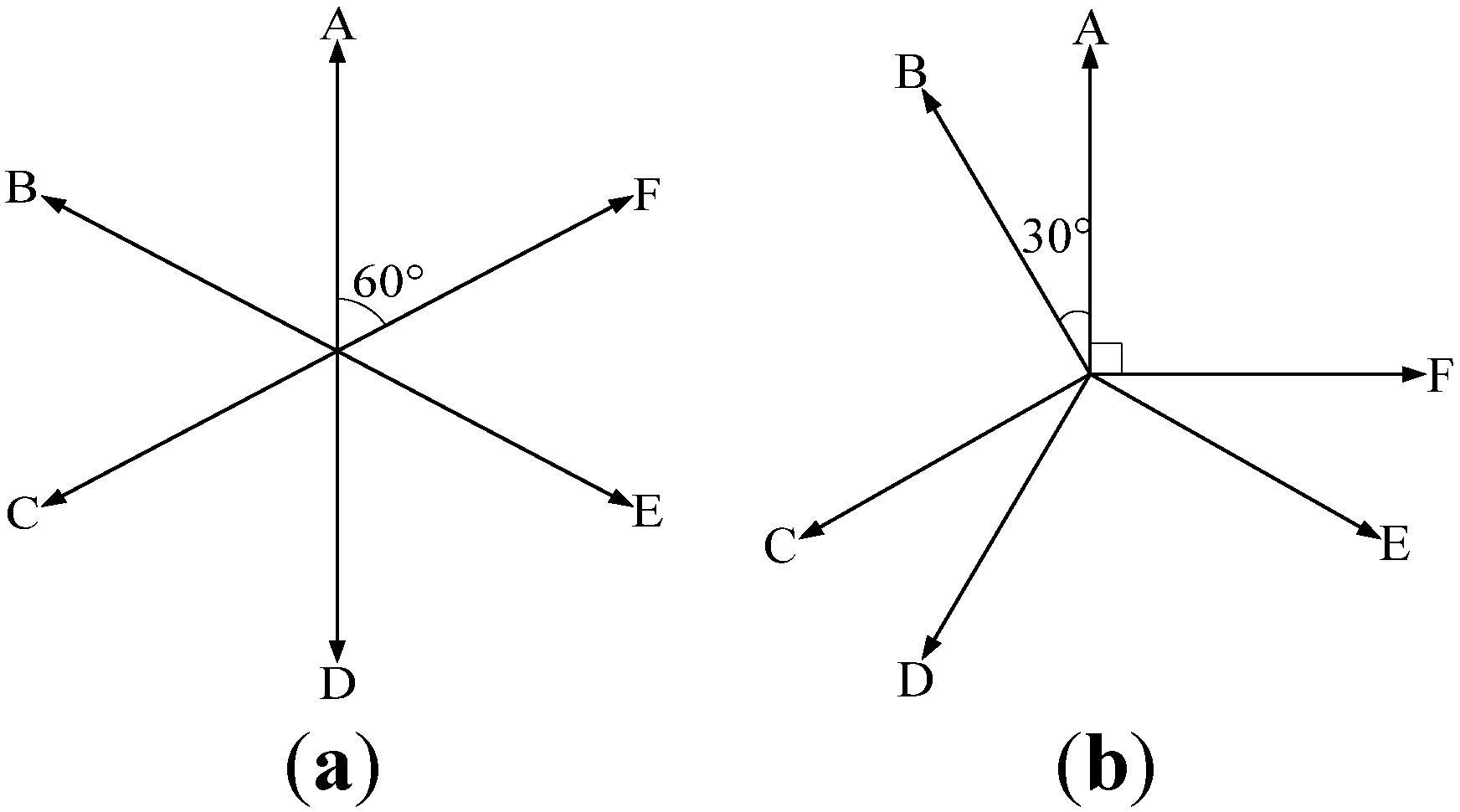
i.e., symmetric six-phase PMSM with 60 degree phase belt and asymmetric six-phase PMSM with 30 degree phase belt, as shown in
Figure 1.
Figure 1.
Two winding configurations for six-phase permanent magnet synchronous machine (PMSM): (a) symmetric six-phase PMSM; and (b) asymmetric six-phase PMSM.
Figure 1.
Two winding configurations for six-phase permanent magnet synchronous machine (PMSM): (a) symmetric six-phase PMSM; and (b) asymmetric six-phase PMSM.
The symmetric six-phase PMSM has similar magnetic features referring to a 60-degree phase-belt three-phase PMSM [
26]. On the other hand, the asymmetric six-phase PMSM [
27], with two three-phase windings shifting by 30 degree, is magnetically approximate to a twelve-phase machine. Thus, it can be called a semi-twelve-phase PMSM [
28]. Apparently, one of the differences between the two schemes is the winding-produced MMF harmonic components. The MMF harmonic components of the asymmetric six-phase PMSM is (12
k ± 1)th, and that of the symmetric six-phase PMSM is (6
k ± 1)th. Roughly speaking, the MMF harmonic components of the asymmetric six-phase PMSM are almost half of that of the symmetric one. There is no doubt that the asymmetric six-phase PMSM might have less iron loss and lower torque ripple. However, the situation depends on not only the numbers of harmonics but also the amplitudes of harmonics that should be discussed in specific situations.
It is known to all that, the flux linkage will enhance with a close slot and pole numbers, and thus, a high torque density is achieved. Based on that viewpoint, the machine used for direct-driving EV applications is proposed to employ slot and pole combinations satisfied with 2
p =
Q ± 2, where
p denotes the pole number and
Q denotes the slot number. The feasible slot and pole combinations are listed in
Table 1 and
Table 2, where LCM denotes the lowest common multiple of slot and pole numbers;
SPP denotes slot number per pole per phase. And, a larger LCM number indicates a lower cogging torque. Both alternate-teeth-wound and all-teeth-wound fractional-slot concentrated windings are taken into consideration.
Table 1.
Possible slot/pole combinations of the symmetric six-phase PMSM equipped with fractional-slot concentrated windings (FSCWs). Notes: ▲ means the combinations enable alternate-teeth-wound design.
Table 1.
Possible slot/pole combinations of the symmetric six-phase PMSM equipped with fractional-slot concentrated windings (FSCWs). Notes: ▲ means the combinations enable alternate-teeth-wound design.
| Q | 2p | |Q−2p| | LCM | Winding type | kw | SPP | Notes |
|---|
| 6 | 4 | 2 | 12 | All-teeth-wound | 0.866 | 1/2 | - |
| 8 | 2 | 24 | All-teeth-wound | 0.866 | 1/4 | - |
| 12 | 10 | 2 | 60 | Alternate-teeth-wound | 0.933 | 2/5 | ▲ |
| All-teeth-wound | - |
| 14 | 2 | 84 | Alternate-teeth-wound | 0.933 | 2/7 | ▲ |
| All-teeth-wound | - |
| 18 | 16 | 2 | 144 | All-teeth-wound | 0.945 | 3/8 | - |
| 20 | 2 | 180 | All-teeth-wound | 0.945 | 3/10 | |
| 24 | 22 | 2 | 264 | Alternate-teeth-wound | 0.949 | 2/11 | ▲ |
| All-teeth-wound | - |
| 26 | 2 | 312 | Alternate-teeth-wound | 0.949 | 2/13 | ▲ |
| All-teeth-wound | - |
| 30 | 28 | 2 | 420 | All-teeth-wound | 0.951 | 5/14 | - |
| 32 | 2 | 480 | All-teeth-wound | 0.951 | 5/16 | - |
| 36 | 34 | 2 | 612 | Alternate-teeth-wound | 0.956 | 6/17 | ▲ |
| All-teeth-wound | - |
| 38 | 2 | 684 | Alternate-teeth-wound | 0.956 | 6/19 | ▲ |
| All-teeth-wound | - |
| 42 | 40 | 2 | 840 | All-teeth-wound | 0.965 | 7/20 | - |
| 44 | 2 | 924 | All-teeth-wound | 0.965 | 7/22 | - |
| 48 | 46 | 2 | 1104 | Alternate-teeth-wound | 0.989 | 4/23 | ▲ |
| All-teeth-wound | - |
| 50 | 2 | 1200 | Alternate-teeth-wound | 0.989 | 4/25 | ▲ |
| All-teeth-wound | - |
| 6k | 6k ± 2 | 2 | - | - | - | - | - |
Table 2.
Possible slot/pole combinations of the asymmetric six-phase PMSM equipped with FSCWs. Notes: ■ means the combinations enable alternate-teeth-wound design and have highest winding factor.
Table 2.
Possible slot/pole combinations of the asymmetric six-phase PMSM equipped with FSCWs. Notes: ■ means the combinations enable alternate-teeth-wound design and have highest winding factor.
| Q | 2p | |Q−2p| | LCM | Winding type | kw | SPP | Notes |
|---|
| 24 | 22 | 2 | 264 | Alternate-teeth-wound | 0.991 | 2/11 | ■ |
| All-teeth-wound | - |
| 26 | 2 | 312 | Alternate-teeth-wound | 0.991 | 2/13 | ■ |
| All-teeth-wound | - |
| 48 | 46 | 2 | 1104 | Alternate-teeth-wound | 0.989 | 4/23 | - |
| All-teeth-wound | - |
| 50 | 2 | 1200 | Alternate-teeth-wound | 0.989 | 4/25 | - |
| All-teeth-wound | - |
| 24k | 24k ± 2 | 2 | - | - | - | - | - |
Although the pole and slot combinations have been introduced in the discussion of six-phase supply feasibility, the selections for the feasible six-phase supply are limited to two three-phase winding shifting by 30 degree [
29]. However, in
Table 1 and
Table 2, two possible winding distributions—symmetric and asymmetric six-phase windings—are involved with the limitation of 2
p =
Q ± 2. With the design of close slot and pole numbers, there are more combinations for the symmetric six-phase PMSM as shown in
Table 1 and
Table 2.
As shown in
Table 1, only the schemes with 12
k slot numbers allow the alternate-teeth-wound winding arrangements (marked with ▲). With alternate-teeth-wound windings, the machine is well protected against internal short-circuit failure between phases. The winding factor increases and cogging torque decreases when the slot and pole numbers get larger. Among all the slot/pole combinations shown in
Table 1 and
Table 2, the 24-slot/22-pole or 24-slot/26-pole asymmetric six-phase scheme (marked with ■), which enables alternate-teeth-wound winding arrangement and has the largest winding factors, is more suitable for the in-wheel applications than the others.
Additionally, compared to symmetric six-phase PMSM, the winding axes of asymmetric six-phase PMSM are not coincident with each other, which enables a fault tolerance up to four-phase open circuit fault. For instance, assume that the open circuit fault occurs at the phases A, B, D and E in
Figure 1b, the symmetric six-phase machine merely has two aligned phases C and F. Thus, it is impossible to reconstruct a circular rotating MMF field in some types of severe fault conditions.
2.2. MMF Harmonic Analysis
In this paper, the MMF harmonic is represented by an integer harmonic system rather than a fractional harmonic system. For a fractional-slot concentrated winding machine, the main component of the stator MMF is commonly a high-order component instead of the 1st component [
18]. Thus, the harmonic leakage inductance is quite large compared to the conventional distributed winding machine. Furthermore, the harmonics of the stator MMF have impacts on the cogging torque, eddy-current loss and power factor. Among all the MMF harmonic components, the two-pole sub-harmonic component [
22] which travels at a reverse different speed is particularly high. MMF harmonic analysis is performed to compare schemes with different winding arrangements and slot/pole combinations.
As mentioned earlier in
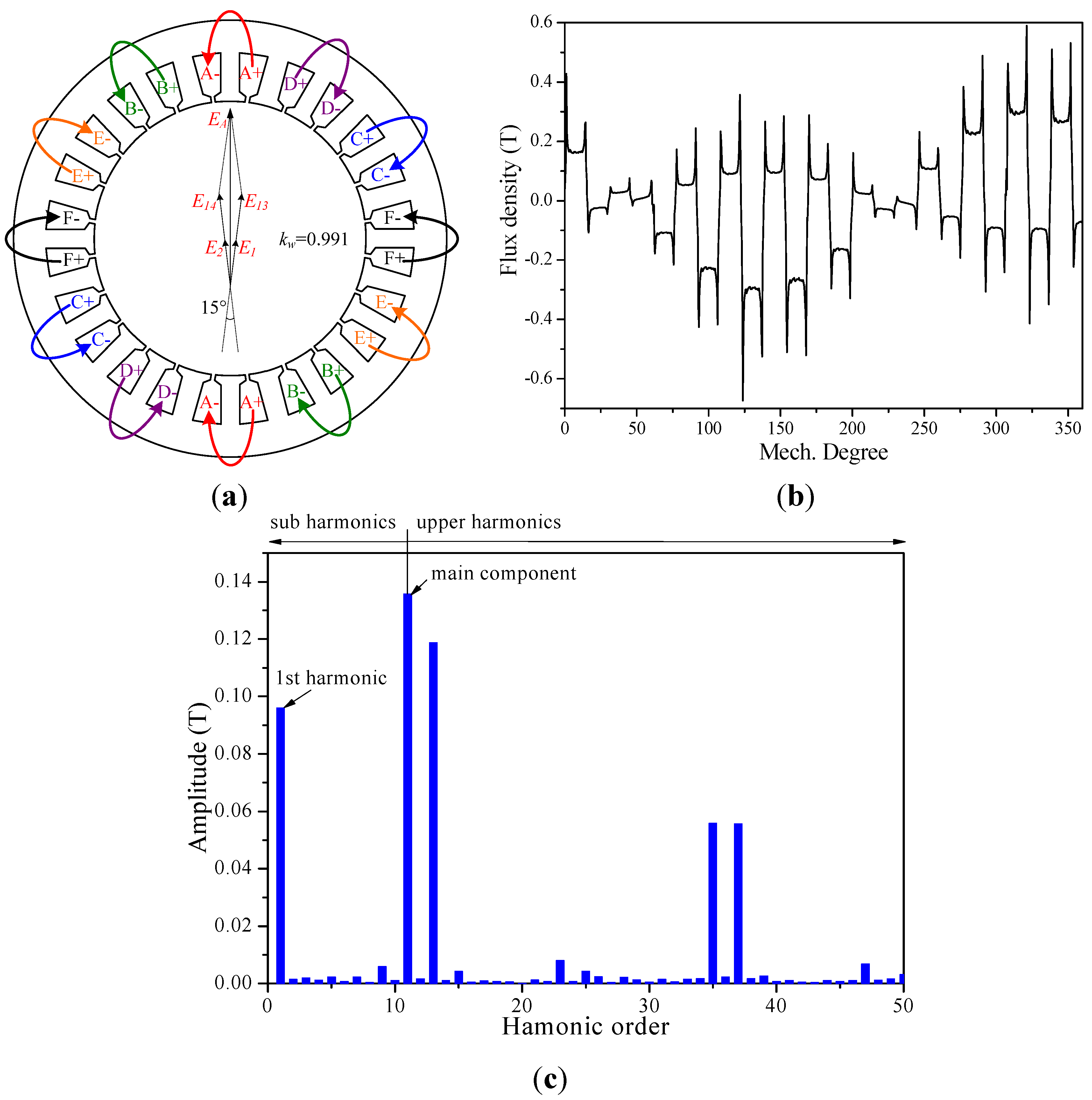
Section 2.1, the 24-slot/22-pole (or 24-slot/26-pole) asymmetric six-phase scheme, which enables alternate-teeth-wound winding arrangement and has the largest winding factors, is more suitable for the applications. The winding arrangement and MMF harmonic analysis are shown in
Figure 2, based on the MMF calculation theorem for concentrated winding machines [
30]. The MMF harmonic spectrum is obtained by analyze the winding-produced air-gap flux density.
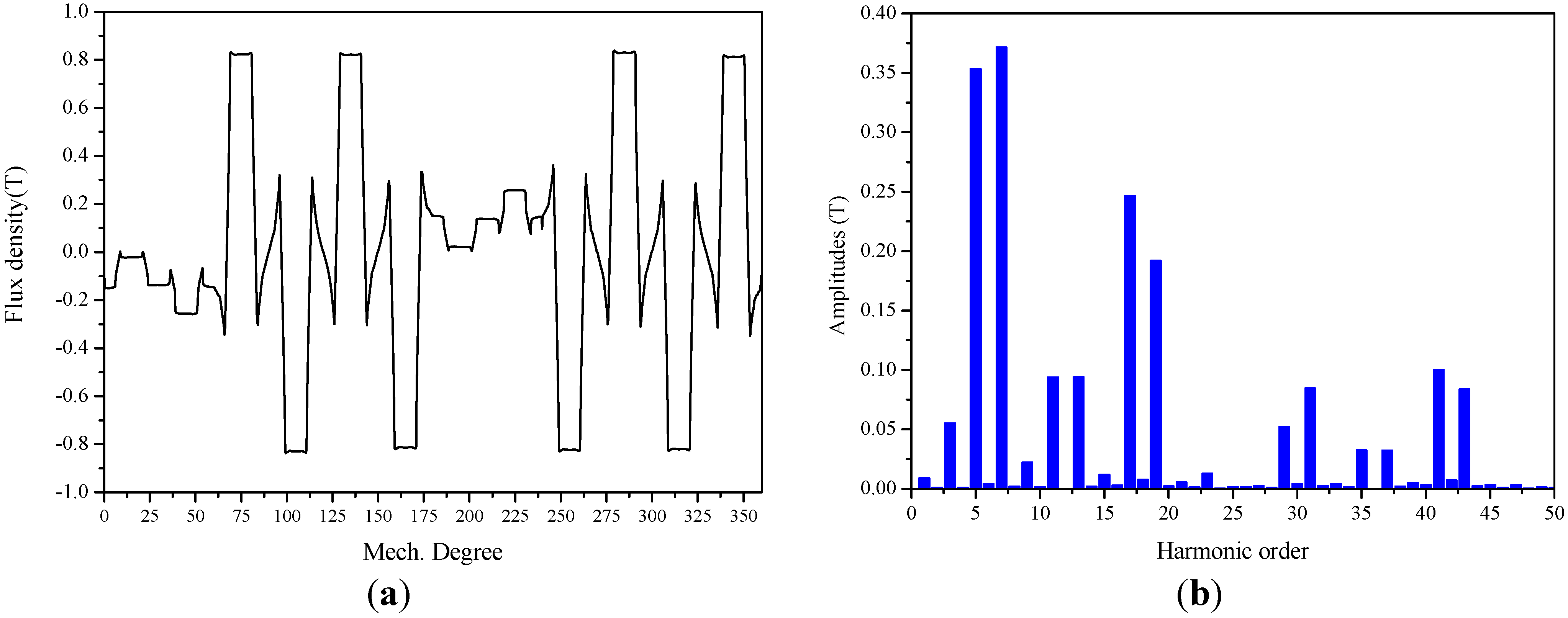
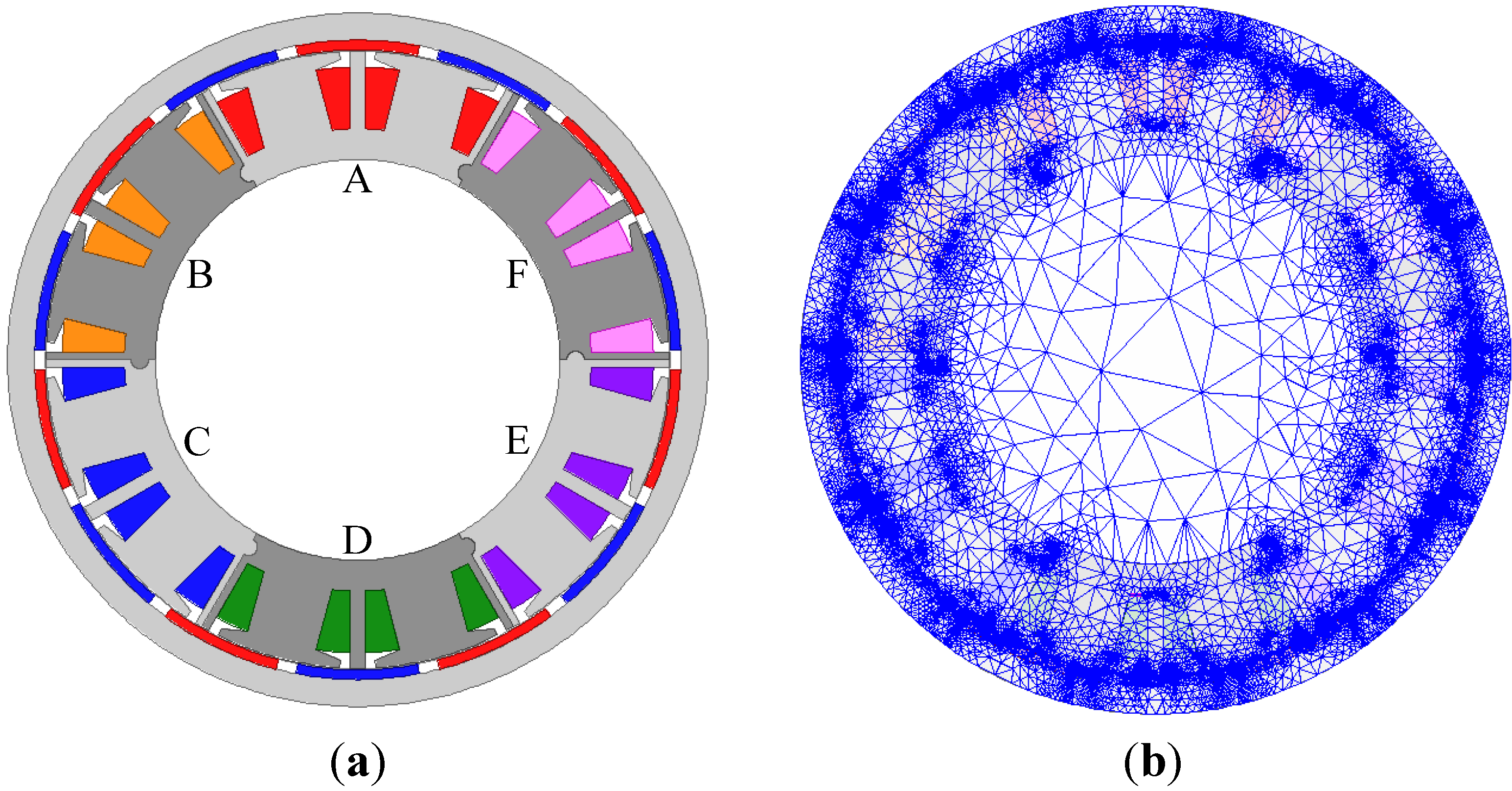
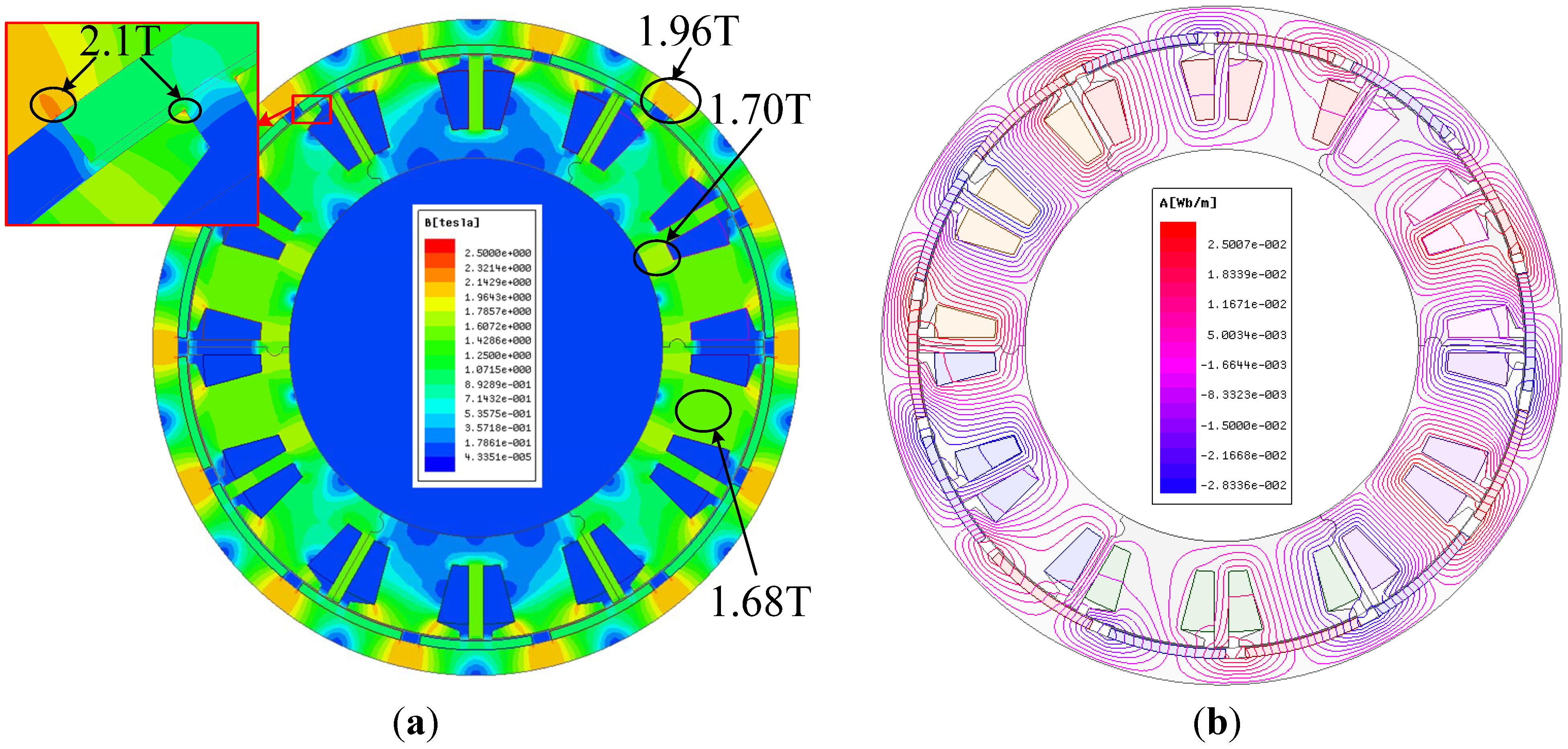
Figure 2.
Winding arrangement and main magnetomotive force (MMF) harmonic analysis of the 24-slot alternate-teeth-wound asymmetric six-phase PMSM: (a) stator winding arrangement and synthesized electromotive force (EMF) vector; (b) air-gap flux density; and (c) winding-produced air-gap flux density spectrum.
Figure 2.
Winding arrangement and main magnetomotive force (MMF) harmonic analysis of the 24-slot alternate-teeth-wound asymmetric six-phase PMSM: (a) stator winding arrangement and synthesized electromotive force (EMF) vector; (b) air-gap flux density; and (c) winding-produced air-gap flux density spectrum.
As can be seen in
Figure 2c, the spectrum of the flux density produced by the stator windings consists of (12
k ± 1)th harmonic components. Also, a strong 1st component can be observed with amplitude of 70.4% of the main component (11th). Thus it induces eddy current both in iron and PMs, which is determined by the amplitude and velocity contrast [
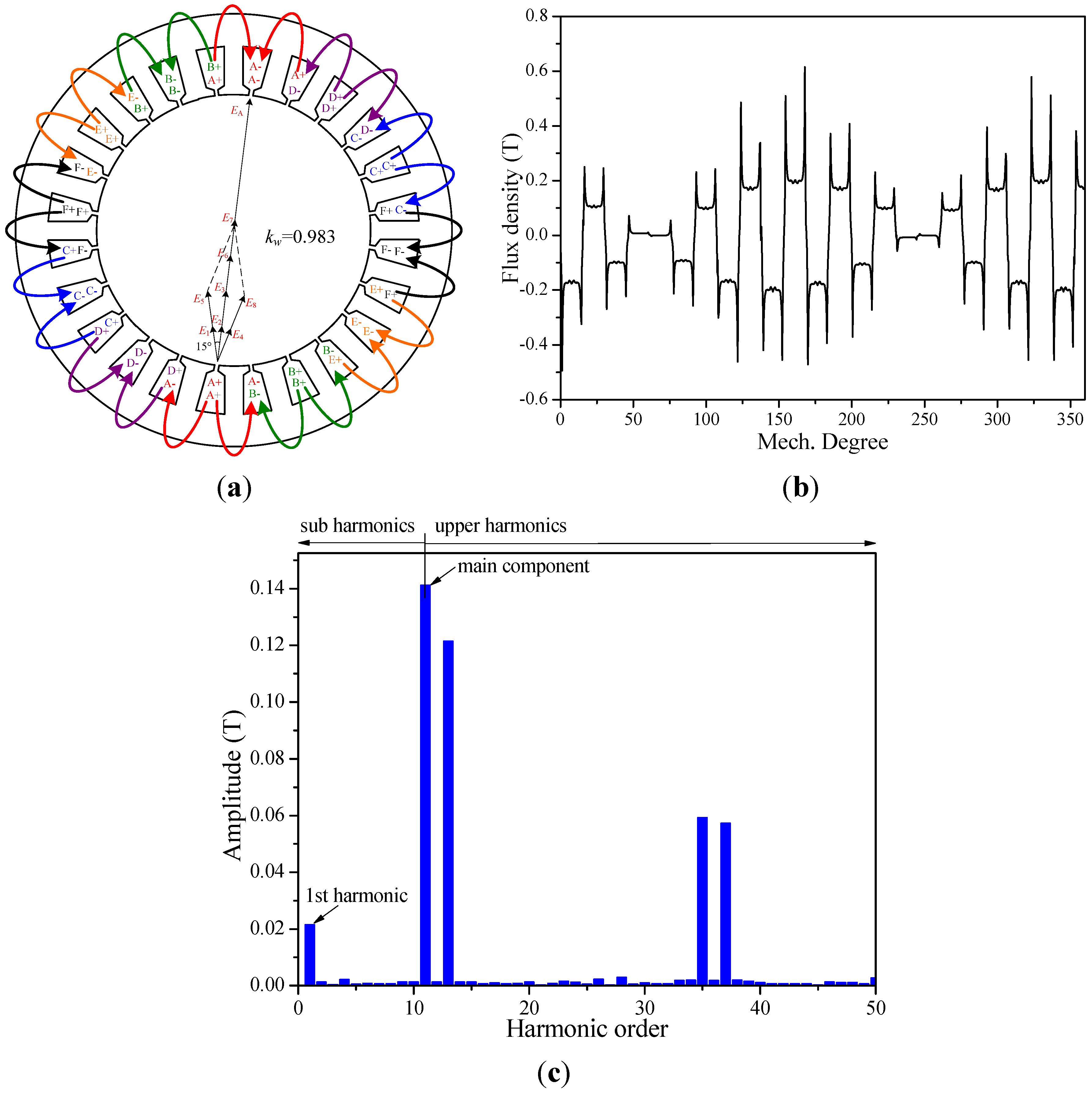
31]. Such a large harmonic content can drastically reduce the motor performance. Specifically, it can reduce the power factor and efficiency, and cause temperature rises in the PMs. To solve this problem, all-teeth-wound schemes are frequently employed, as shown in
Figure 3.
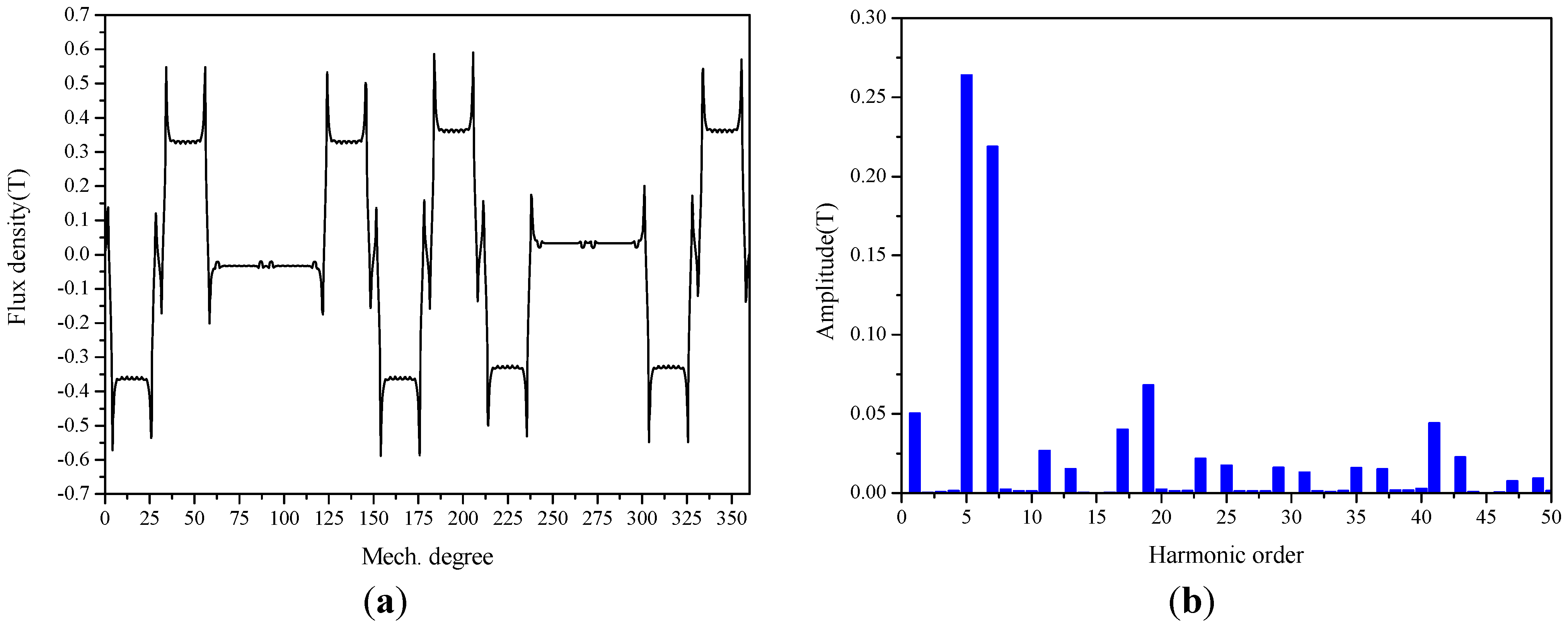
Figure 3.
Winding arrangement and MMF harmonic analysis of the 24-slot all-teeth-wound asymmetric six-phase PMSM: (a) stator winding arrangement and the synthesized EMF vector; (b) air-gap flux density; and (c) winding-produced air-gap flux density spectrum.
Figure 3.
Winding arrangement and MMF harmonic analysis of the 24-slot all-teeth-wound asymmetric six-phase PMSM: (a) stator winding arrangement and the synthesized EMF vector; (b) air-gap flux density; and (c) winding-produced air-gap flux density spectrum.
The 24-slot/22-pole all-teeth-wound scheme changes the distributing winding factor of each harmonic component. It can be clearly seen that, the 1st component is prominently suppressed. By making use of the estimation formula illustrated in reference [
32], the PM losses produced by the 1st harmonic are reduced by 95.01% attributing to a change from alternate-teeth-wound scheme to all-teeth-wound scheme. However, as for fault-tolerant drives, isolation between the phase windings is of great significance. Note that each slot of the above scheme contains two coil sides. Thus, there are possibilities of short-circuit failure between phases, which increases the probability of failures that are difficult to deal with. Hence, the challenge becomes how to suppress the 1st MMF harmonic with alternate-teeth-wound windings. One possible solution is presented in
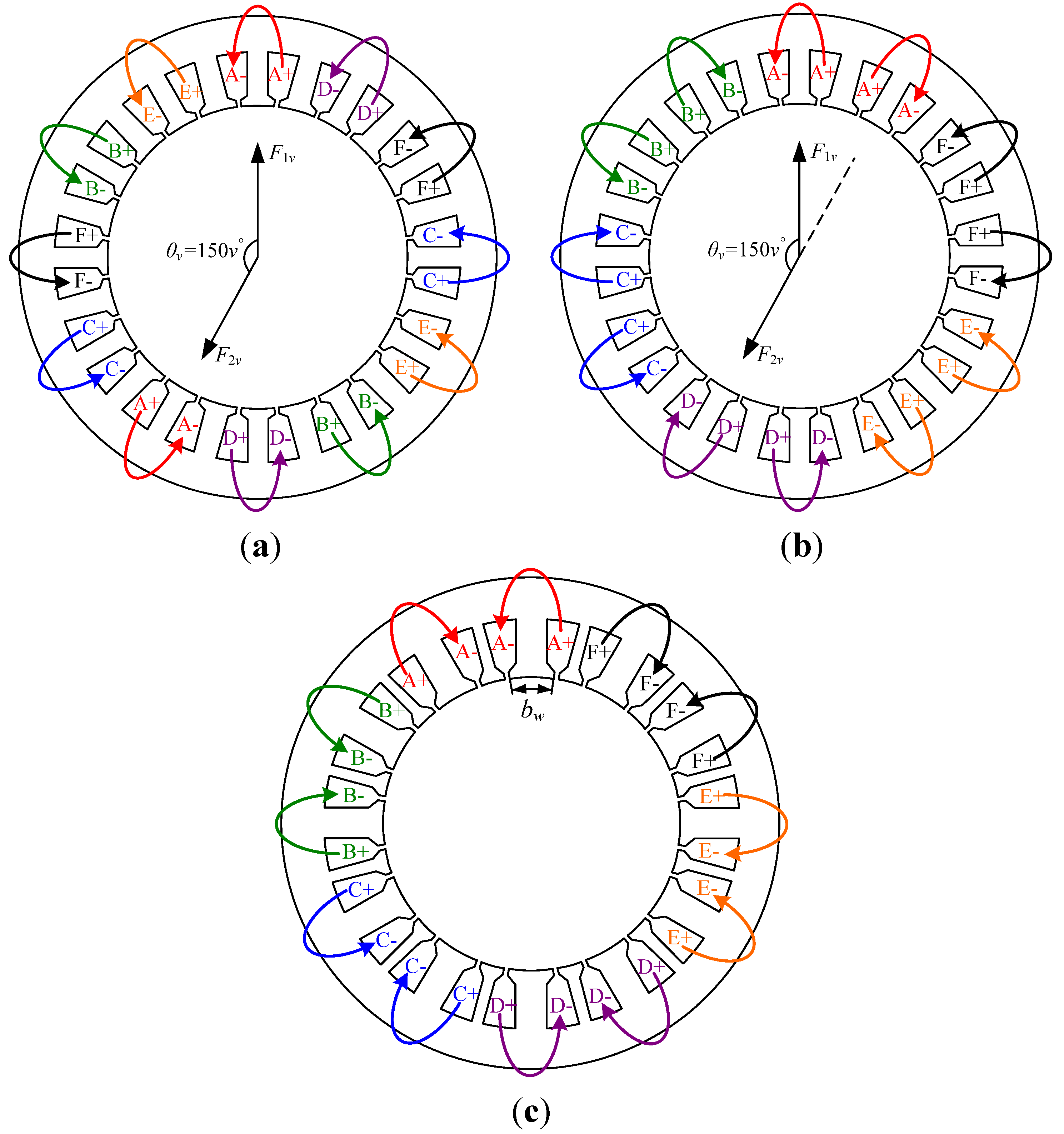
Figure 4.
Figure 4.
Stator winding arrangements of the 24-slot alternate-teeth-wound six-phase PMSM: (a) two coils of same phase shifting by 150 degree; (b) two adjacent coils per phase; and (c) two adjacent coils per phase with unequal teeth widths.
Figure 4.
Stator winding arrangements of the 24-slot alternate-teeth-wound six-phase PMSM: (a) two coils of same phase shifting by 150 degree; (b) two adjacent coils per phase; and (c) two adjacent coils per phase with unequal teeth widths.
As can be seen in
Figure 4a, the idea begins with employing two coils of the same phase shifting by 150 mechanical degree in order to change the distributed factor of the stator MMF vectors. The angle
θν = 150
ν° in
Figure 4a denotes the electrical angle between two MMF vectors
F1ν and
F2ν for the
νth MMF harmonic component. Thus, the synthetized MMF vectors for the
νth harmonic component are given by:
where the
Fmν denotes the amplitude of the 1st MMF component;
Kdν = cos(
ν75
°) is defined to be the distributed factor for
νth MMF component and calculated in
Table 3, which indicates the suppression level of the harmonics.
Table 3.
The distributed factor for νth MMF component.
Table 3.
The distributed factor for νth MMF component.
| Harmonic order | 1st | 5th | 7th | 11th | 13th | 17th | 19th | 23th | 25th | [6(2k + 1) ± 1]th | (12 k ± 1)th |
|---|
| Kdν | 0.259 | 0.966 | −0.966 | 0.259 | −0.259 | 0.966 | −0.966 | 0.259 | −0.259 | ±0.966 | ±0.259 |
| |Kdν| | 0.259 | 0.966 | 0.966 | 0.259 | 0.259 | 0.966 | 0.966 | 0.259 | 0.259 | 0.966 | 0.259 |
It can be clearly seen from
Table 3 that, such a kind of winding arrangement pattern suppresses the 1st, 11th, 13th… MMF harmonic components effectively, while the 5th, 7th… components remain nearly unchanged. Furthermore, the two coils of one phase can be placed adjacent to each other as shown in
Figure 4b without transferring the relationship between the MMF vectors established in
Figure 4a. Therefore, the winding-produced flux can close within a short path so that a better magnetic isolation features can be achieved. And, the winding-produced air-gap flux density and MMF spectrum for the scheme shown in
Figure 4b is illustrated in
Figure 5.
Figure 5.
MMF harmonic analysis of the 24-slot asymmetric six-phase PMSMs having two adjacent coils per phase and equal teeth widths: (a) winding-produced air-gap flux density; and (b) spectrum.
Figure 5.
MMF harmonic analysis of the 24-slot asymmetric six-phase PMSMs having two adjacent coils per phase and equal teeth widths: (a) winding-produced air-gap flux density; and (b) spectrum.
As can be seen in
Figure 5, the 1st harmonic component of the MMF has been nearly eliminated while the fifth and seventh component has become the predominant MMF components amid the air-gap flux density spectrum. Consequently, the appropriate number of rotor poles should be 10 or 14 instead of 22 or 26, resulting in a specific 24-slot/10-pole or 24-slot/14-pole combination. With the decreased number of rotor poles, the pole pitch for the stator winding is much less than 1, which leads to a smaller pitch factor. The pitch factor for the
hth harmonic component is given by:
where
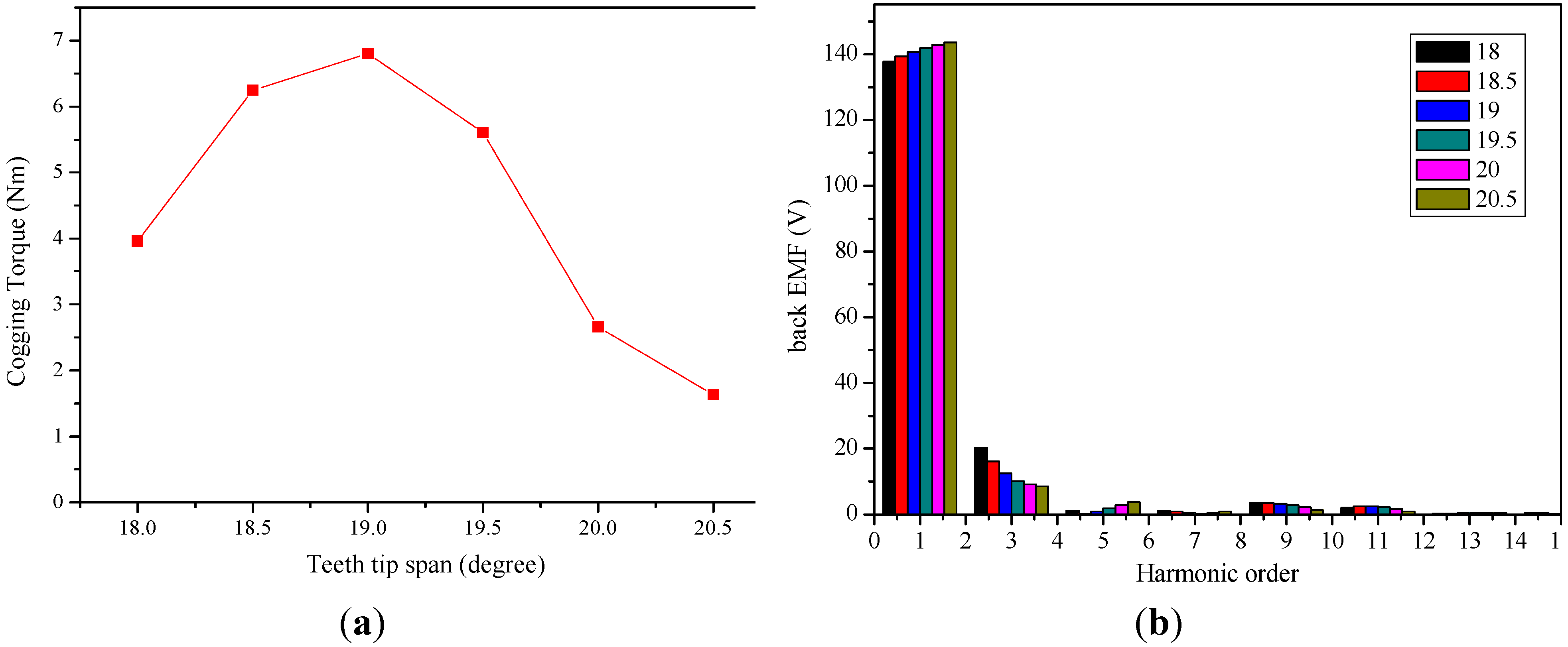
bw is the coil-wound tooth tip span which is specified in
Figure 4c;
beq is the tooth tip span when all tooth tip spans are equal; and
Q is the slot number. Therefore, unequal tooth tip spans could be employed to enlarge the pitch span of the winding to advance winding pitch factor, as shown in
Figure 4c. Since the pole pitch of a 14-pole scheme is shorter than that of a 10-pole scheme and the maximum teeth span for the 24-slot scheme can be 1/12 of the circumferential length, it is only feasible to adopt a 24-slot/14-pole scheme. The air-gap flux density and spectrum are shown in
Figure 6 regarding a 24-slot/14-pole symmetric six-phase PMSMs having two adjacent coils per phase and unequal teeth width.
As shown in
Figure 6, by making use of the extended coil-wound tooth span, the 5th and 7th harmonic components become more dominant among all the MMF components compared with what is shown in
Figure 5b.
Figure 6.
MMF harmonic analysis of the 24-slot symmetric six-phase PMSMs having two adjacent coils per phase and unequal teeth widths: (a) winding-produced air-gap flux density; and (b) spectrum.
Figure 6.
MMF harmonic analysis of the 24-slot symmetric six-phase PMSMs having two adjacent coils per phase and unequal teeth widths: (a) winding-produced air-gap flux density; and (b) spectrum.
Imagine that the widths of the non-wound tooth tips are adjusted to be zero, the 24-slot/14-pole machine will actually transform into a 12-slot/14-pole one with all-teeth-wound windings. Here we provide the differences between the two schemes to clarify this point:
- (1)
The all-teeth-wound 12-slot/14-pole scheme allows the underlying possibility of short-circuit fault between two different phases, which means that the scheme is not electrically isolated and inappropriate for fault-tolerant uses;
- (2)
Referring to a winding short-circuit failure, the non-wound teeth play a role that provides the closest path for the flux linked by the short-circuit winding. Thus, the fault will not interfere the remaining phases as the other alternate-teeth-wound schemes did.
Additionally, some references have already focused on concentrated winding machines using an irregular distribution of the slots [
33,
34,
35]. Even though the irregular distribution of the slots is, essentially, the unequal teeth scheme, it can still be distinguished from what is talking in this article. What is concerned in references [
33,
34,
35] is how the irregular distribution of the slots is derived from a conventional distributed winding step by step. Besides, high performances—reduced copper loss, low torque ripple and enhanced output torque—was obtained by employing the structure of irregular slot distribution. However, in our paper, the 24-slot/14-pole machine is derived from a 24-slot/22-pole machine (both of them are fractional-slot concentrated winding machines). The major concern is that whether the new pattern can suppress the MMF harmonics and achieve a better isolation feature.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}















