Hardware-in-the-Loop Simulation of Distributed Intelligent Energy Management System for Microgrids



Abstract
:1. Introduction
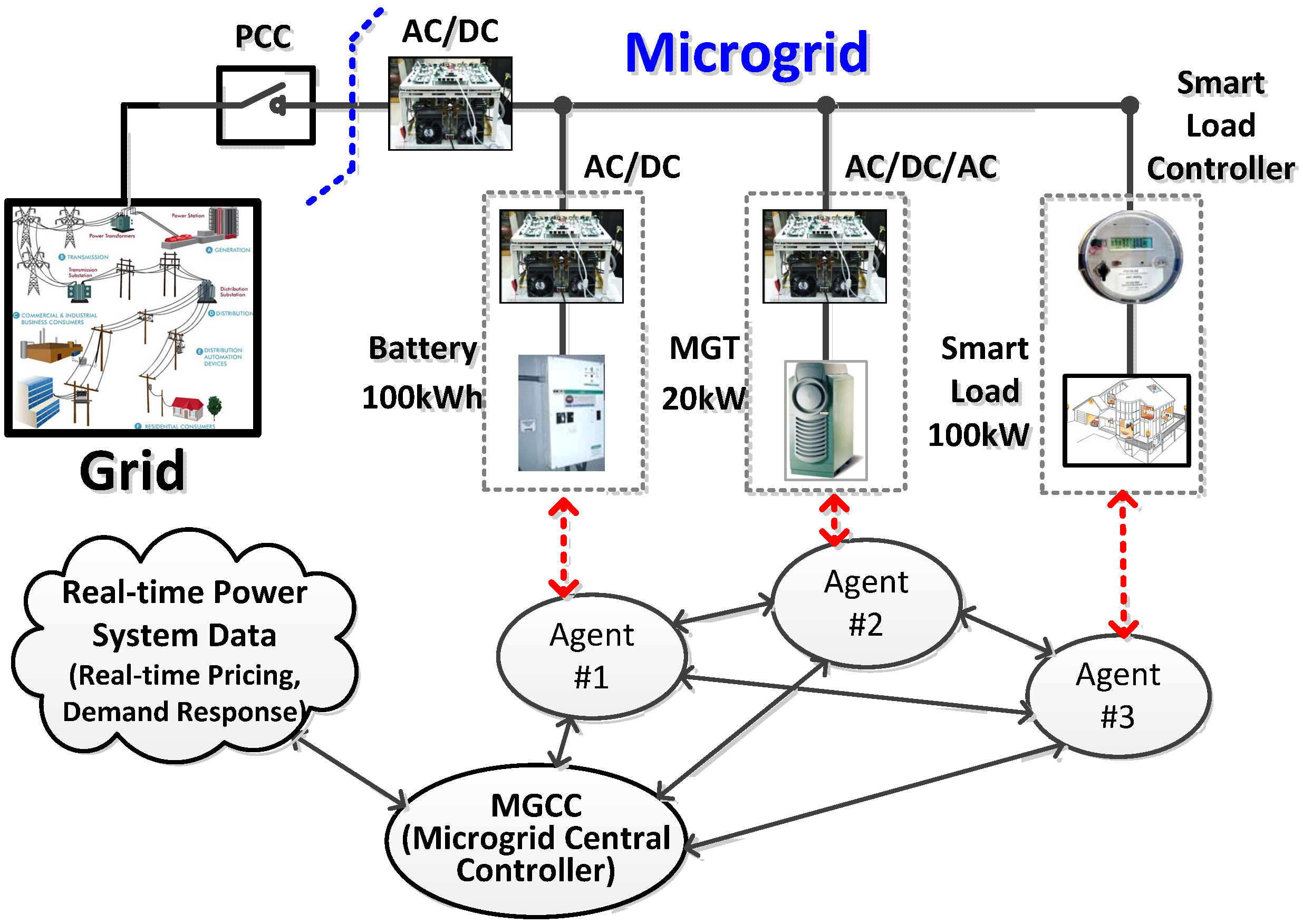
2. Microgrid Configuration and Operation
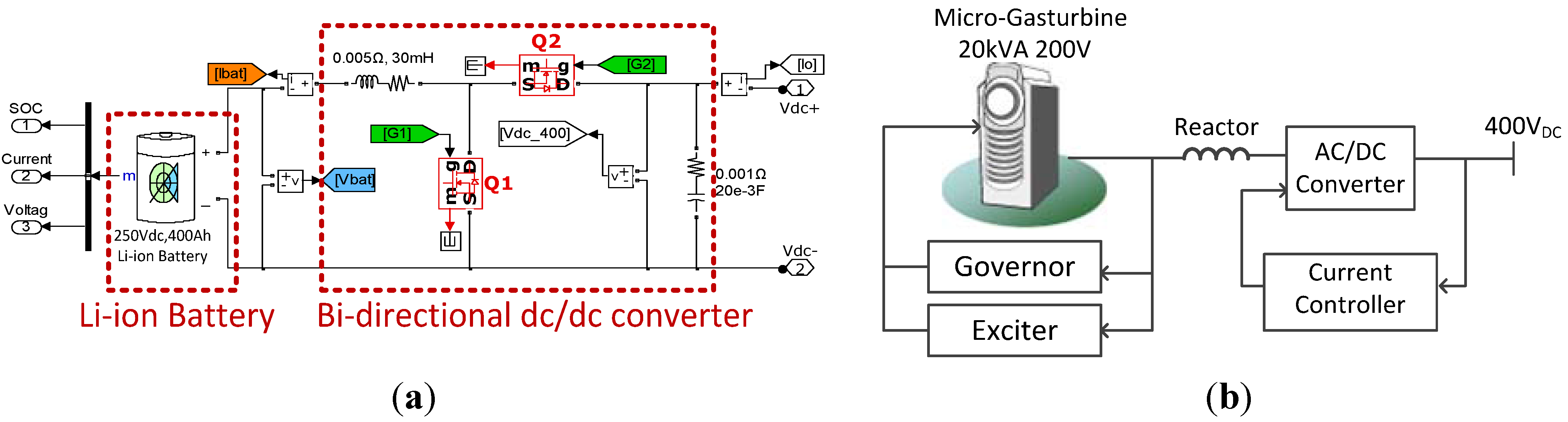
2.1. Microgrid Model




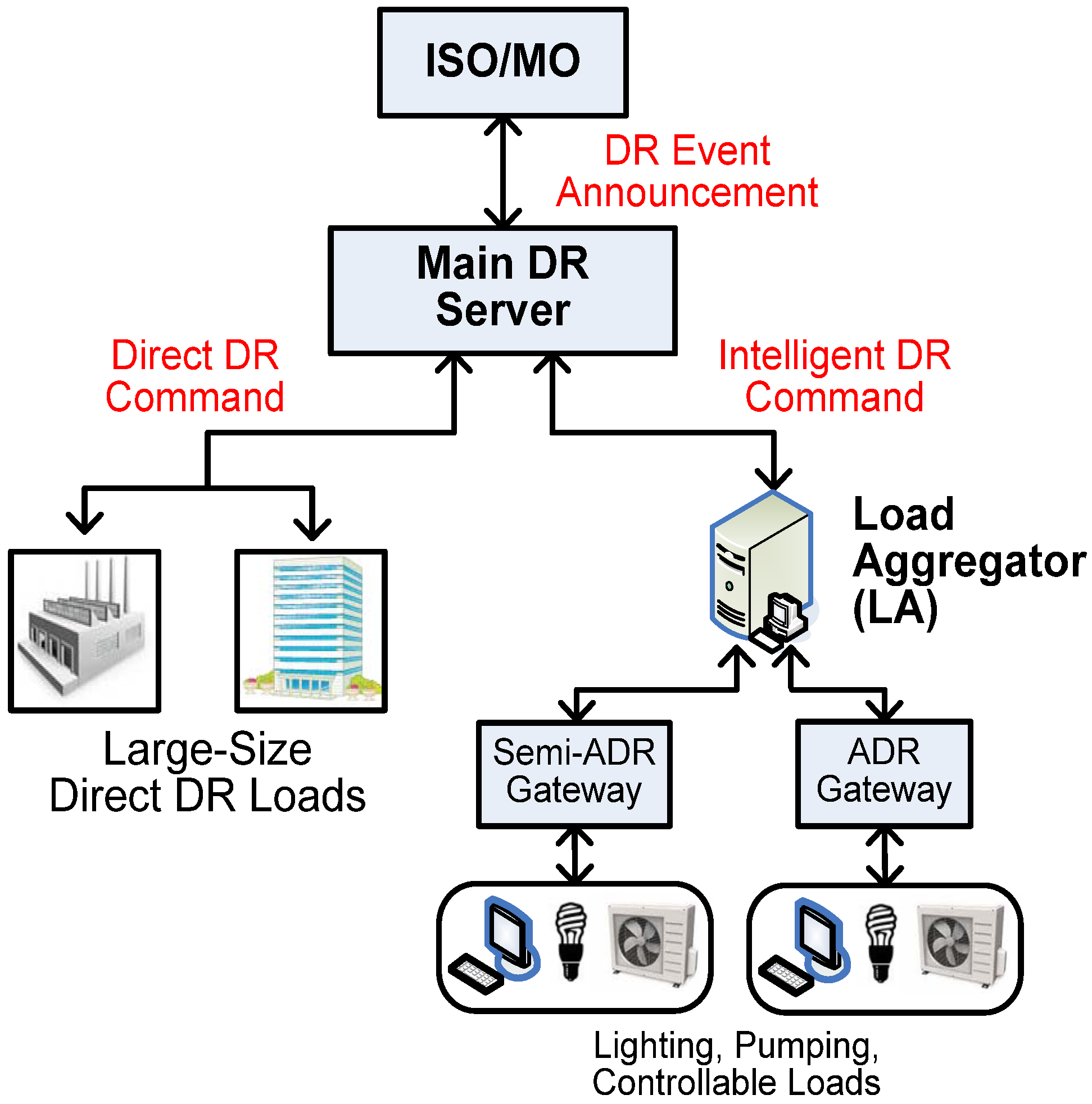
2.2. Emergency Demand Response

3. Development of Microgrid DIMS
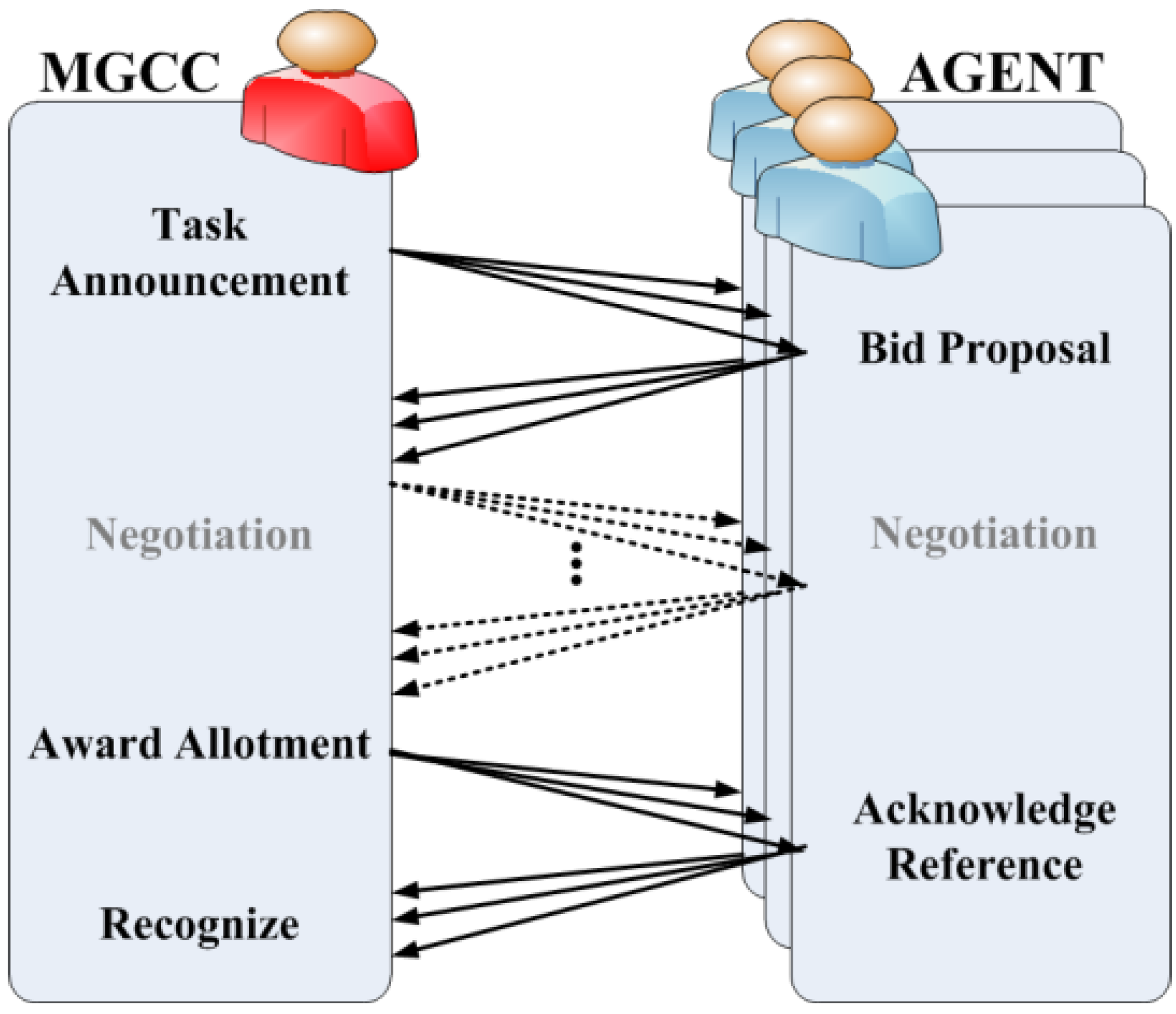
3.1. Intelligent Agents


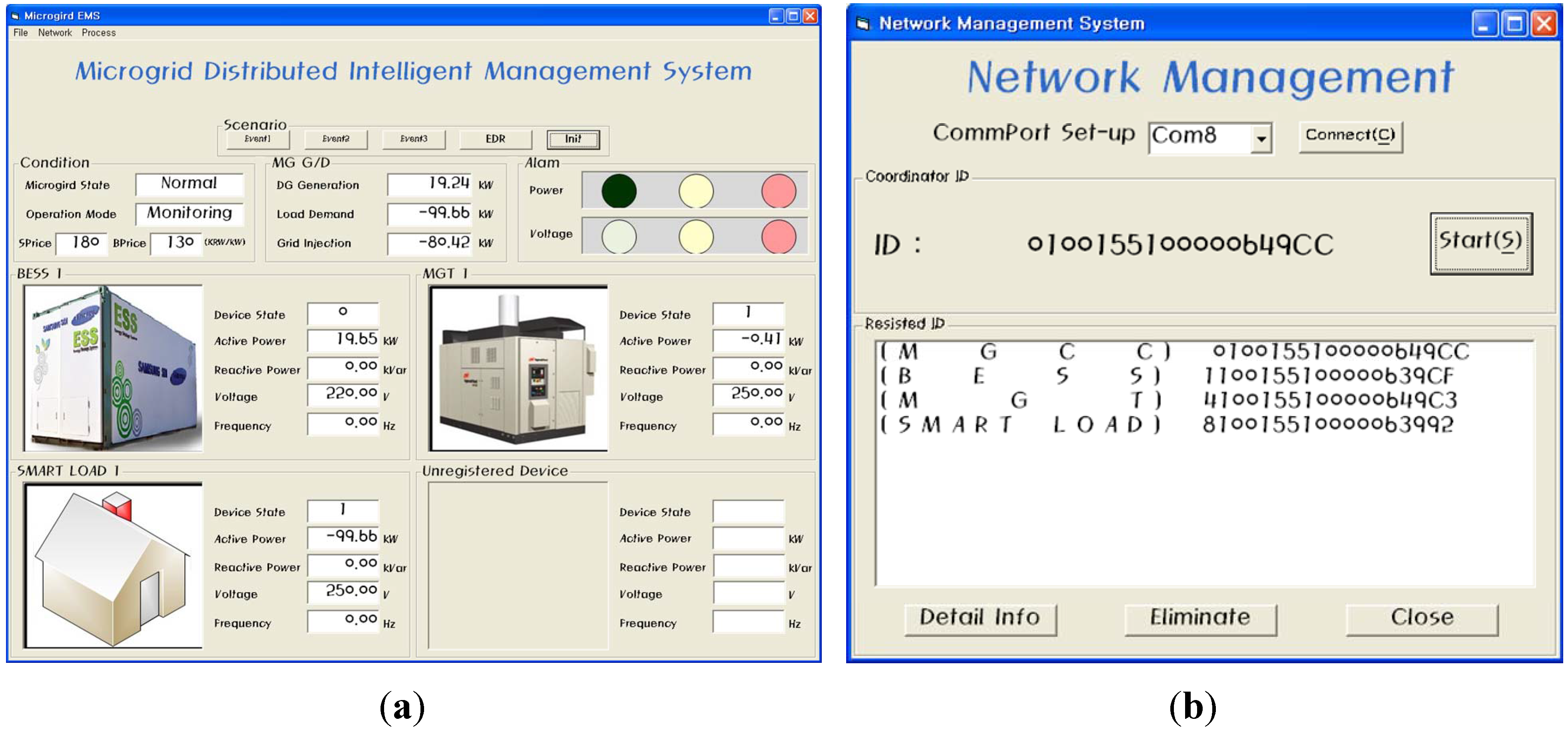
3.2. MGCC


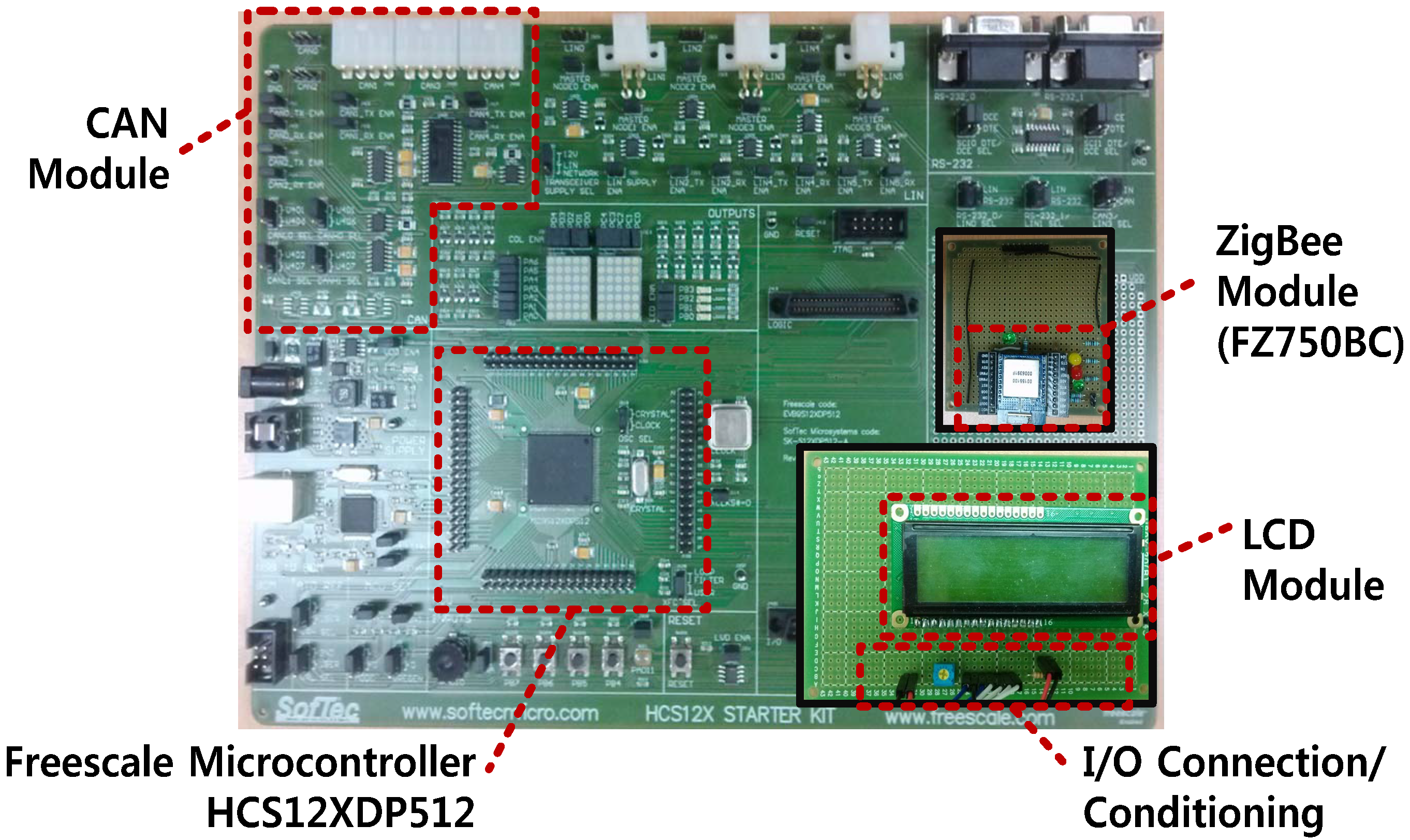
3.3. Communication Network


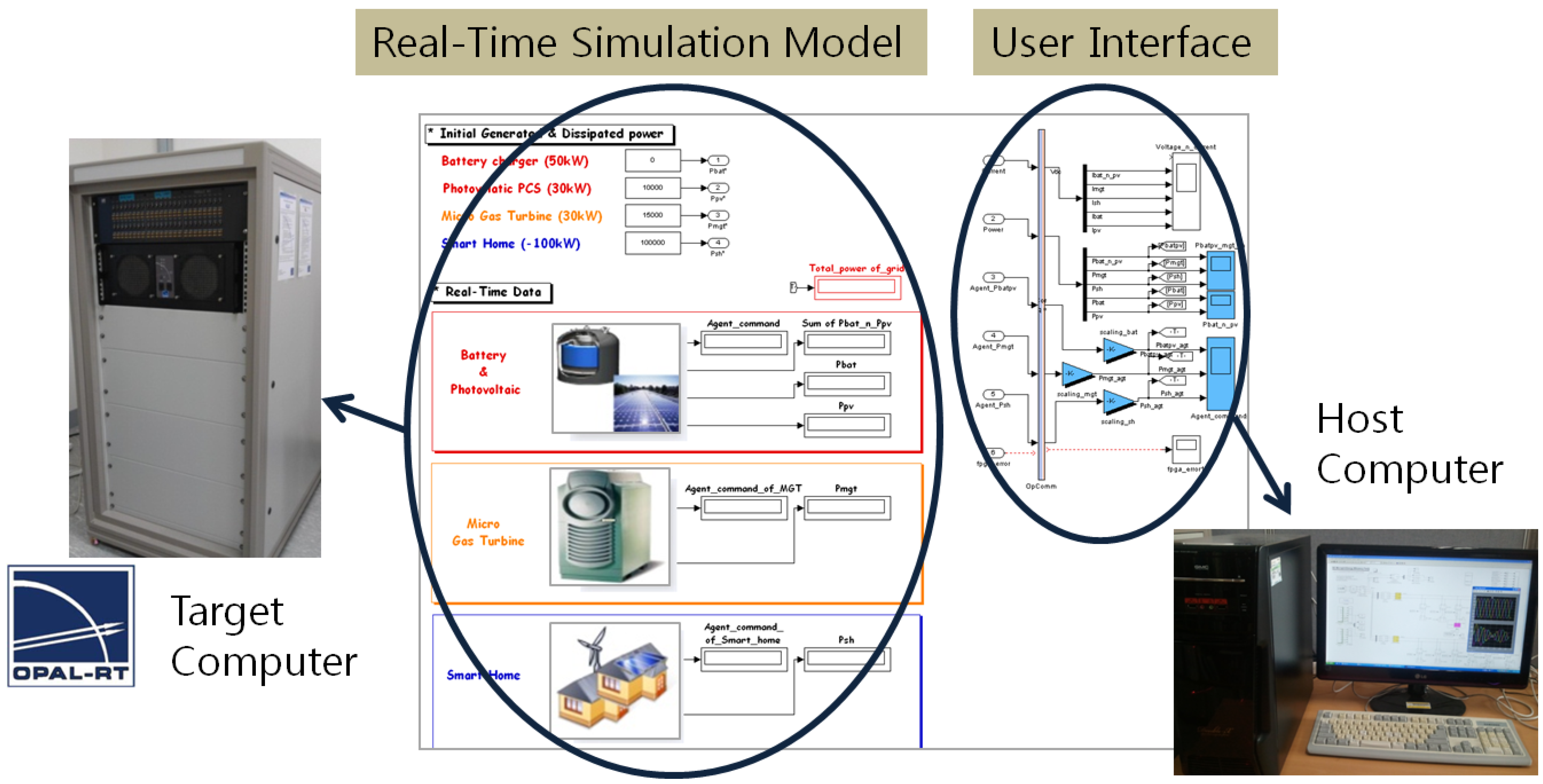
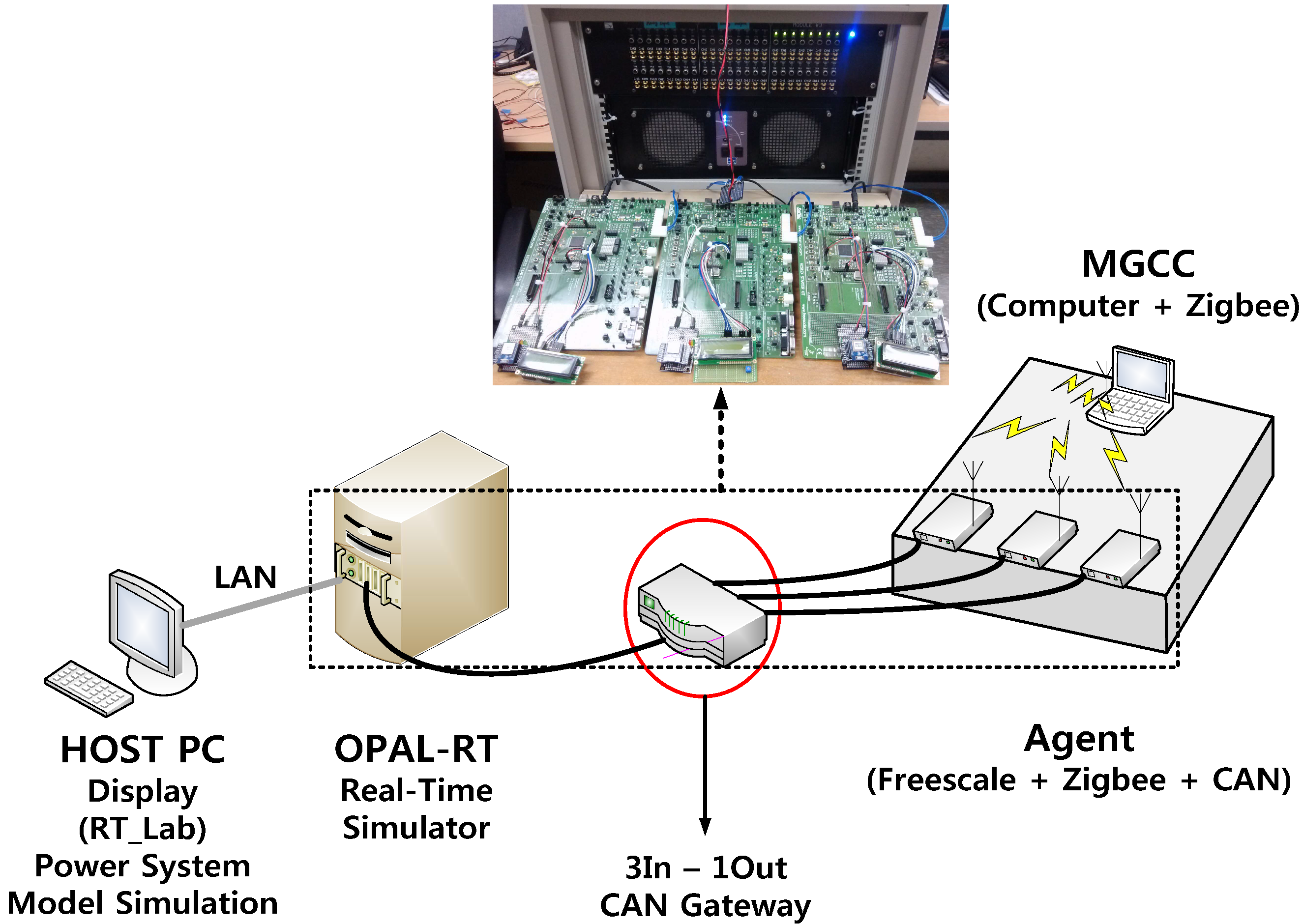
3.4. HILS Set-up

4. Case Studies
4.1. Description of Decision Making Schemes for EDR

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Unit | Rated power | Operation |
|---|---|---|
| BESS | 100 kWh | Charging at 0.1 C-rate
Discharging at 0.2 C-rate (peak time) and up to 1.0 C-rate (critical time) |
| Loads | About 100 kW | About 20 kW (Controllable loads)
About 20 kW (Critical loads) About 60 kW (Sensitive loads) |
| MGT | 20 kW | Back-up generation for emergency
Lacking EDR power supplement |
- Priority 1: Battery discharging;
- Priority 2: Load reduction of controllable loads;
- Priority 3: Load reduction of critical loads;
- Priority 4: MGT generation;
- Priority 5: Mandatory sensitive load shedding;
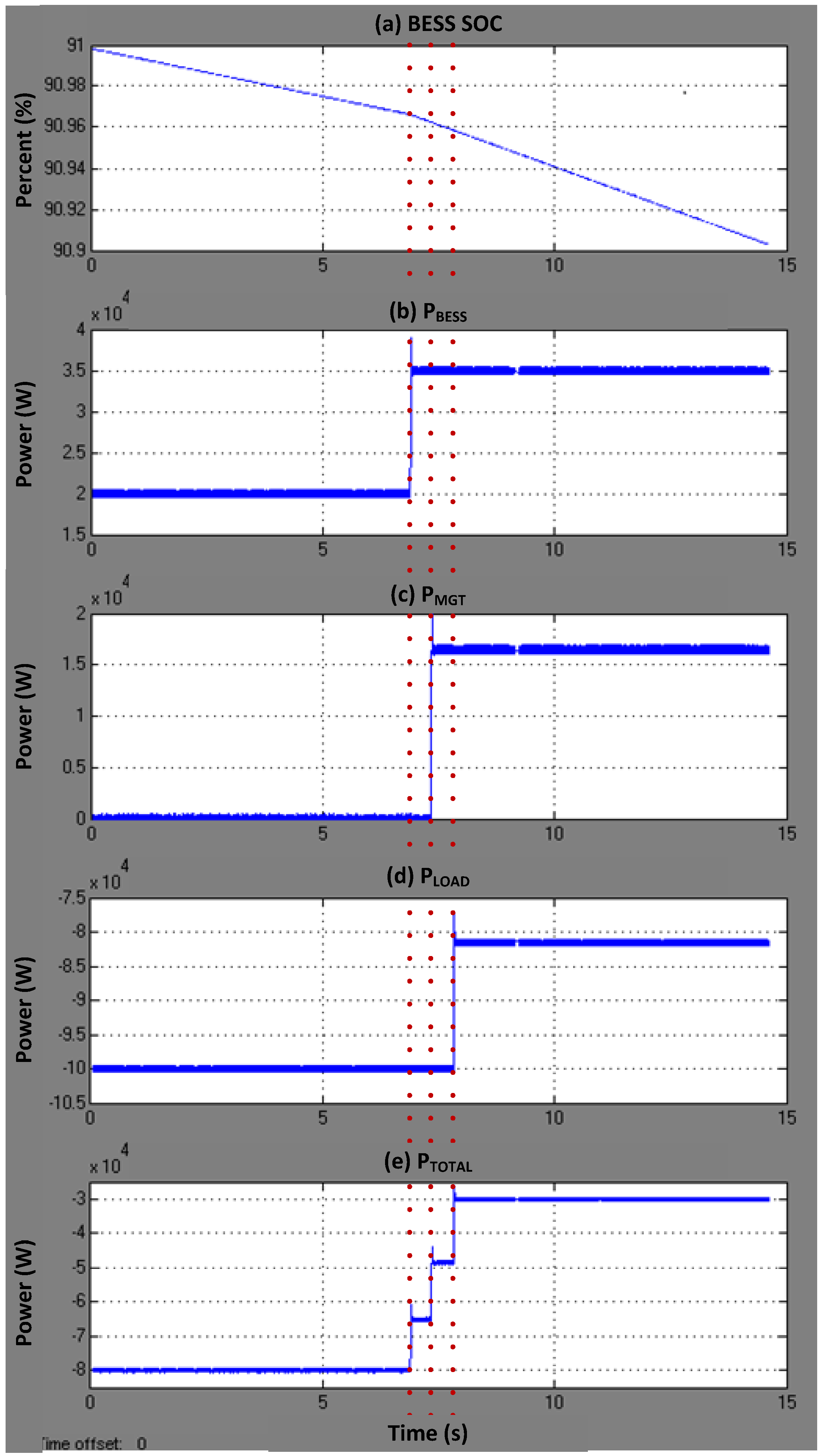
4.2. Experimental Results
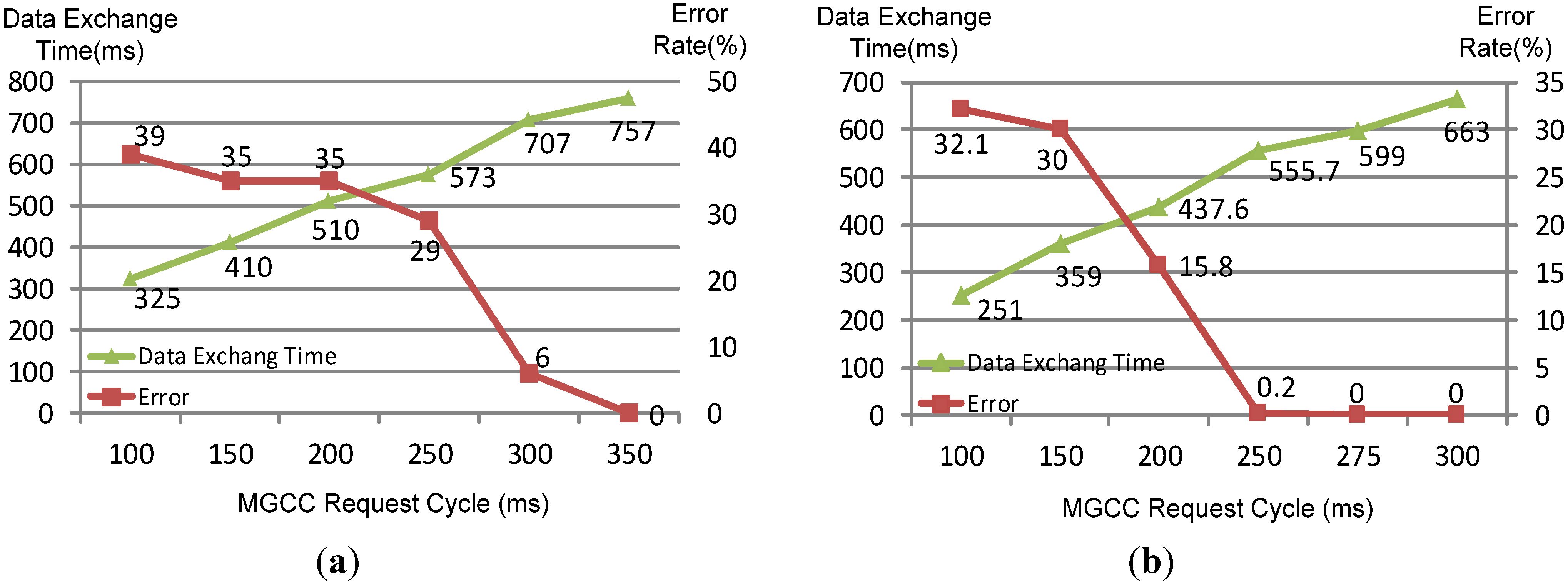
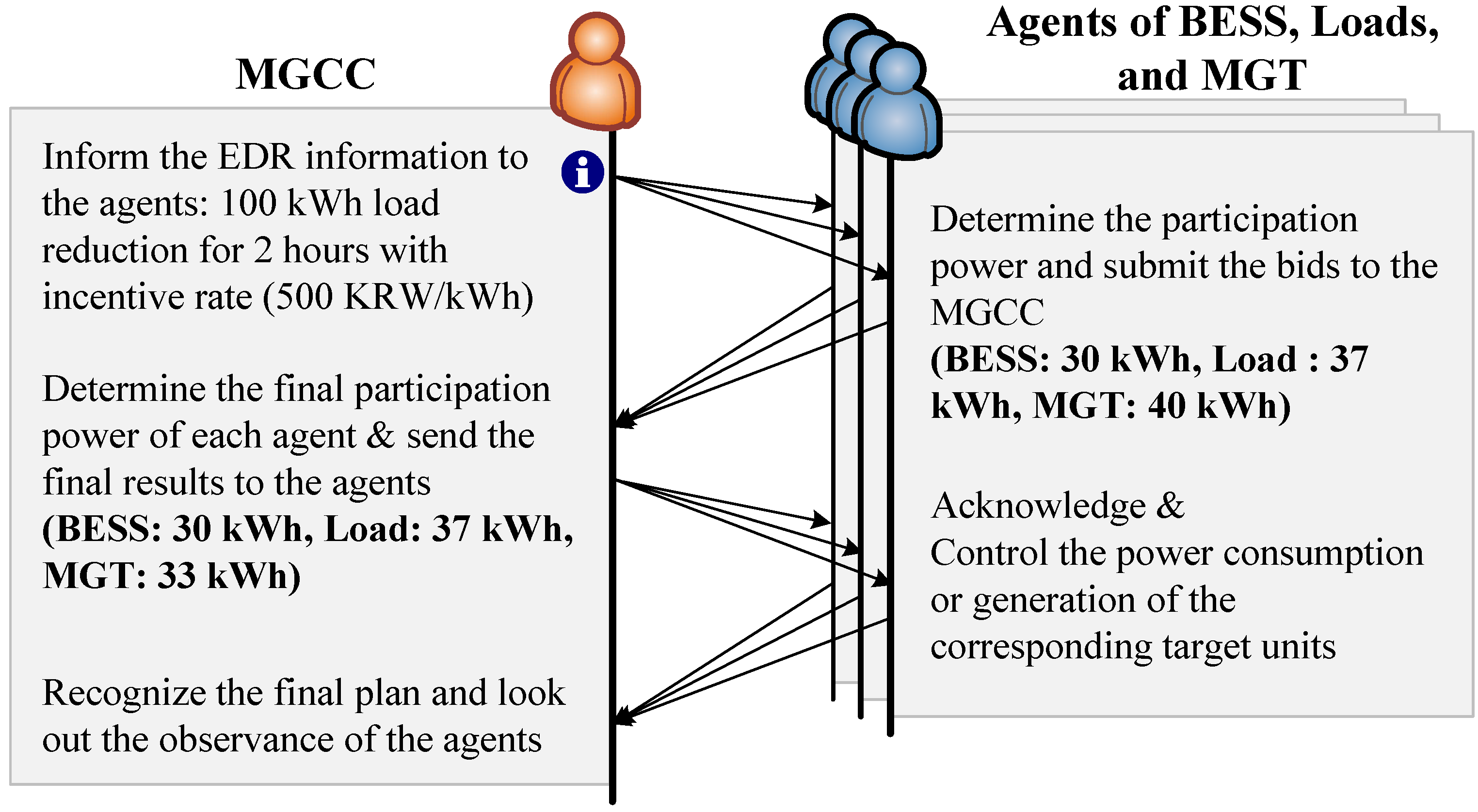
4.2.1. Case 1: One-Round CNP Procedure
- The MGCC informs the EDR event and determines the first-round incentive as 500 KRW/kWh and the second-round incentive as 550 KRW/kWh;
- The EDR request arrives during the peak loading conditions. At that time, the BESS is discharging at 0.2 C-rate and the SOC is 90% at the moment;
- The controllable, critical and sensitive loads are measured as 18.5 kW, 19.5 kW, and 62.0 kW, respectively, at the moment;
- The MGC stands by keeping the generation capability up to 20 kW.


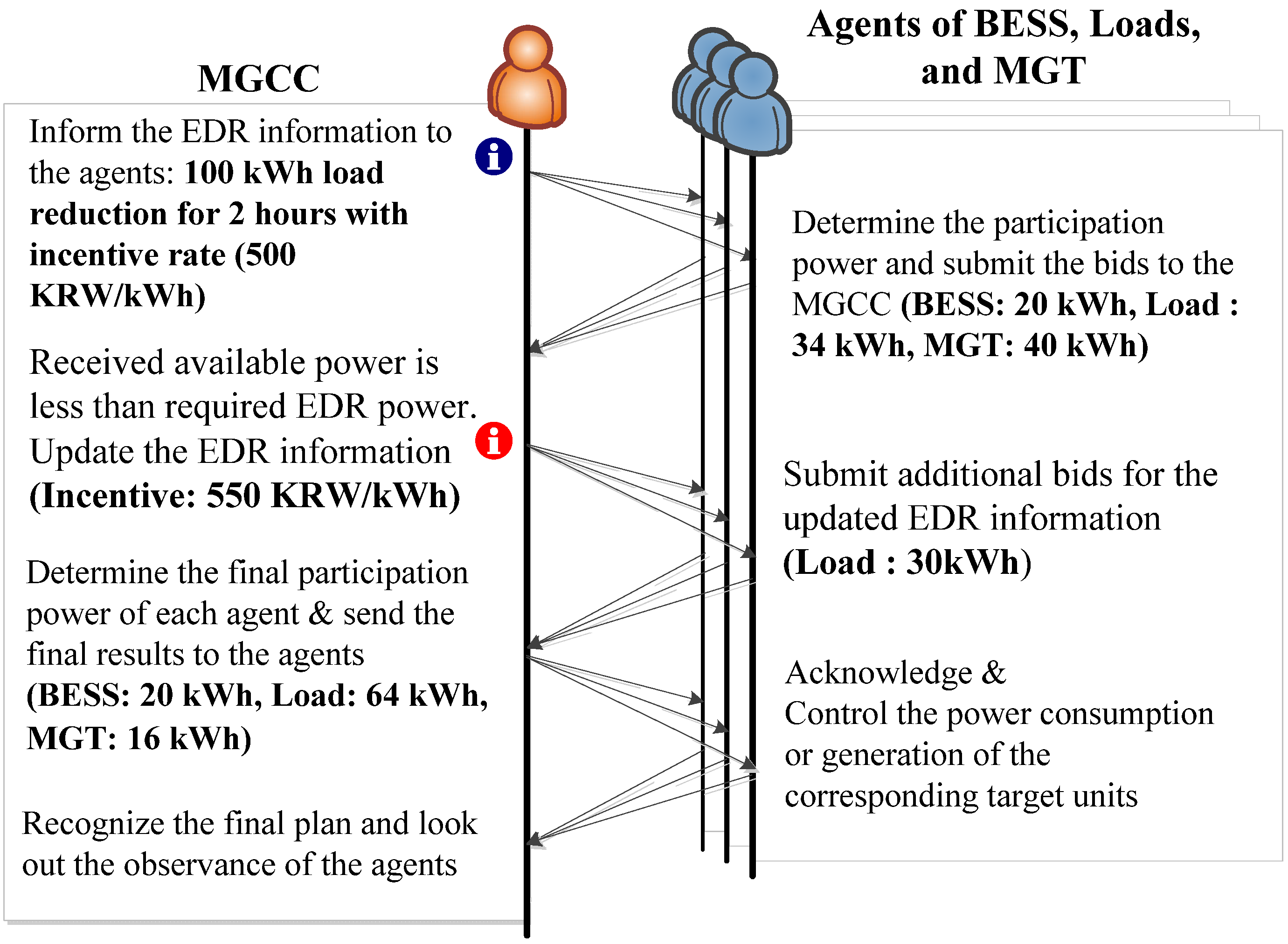
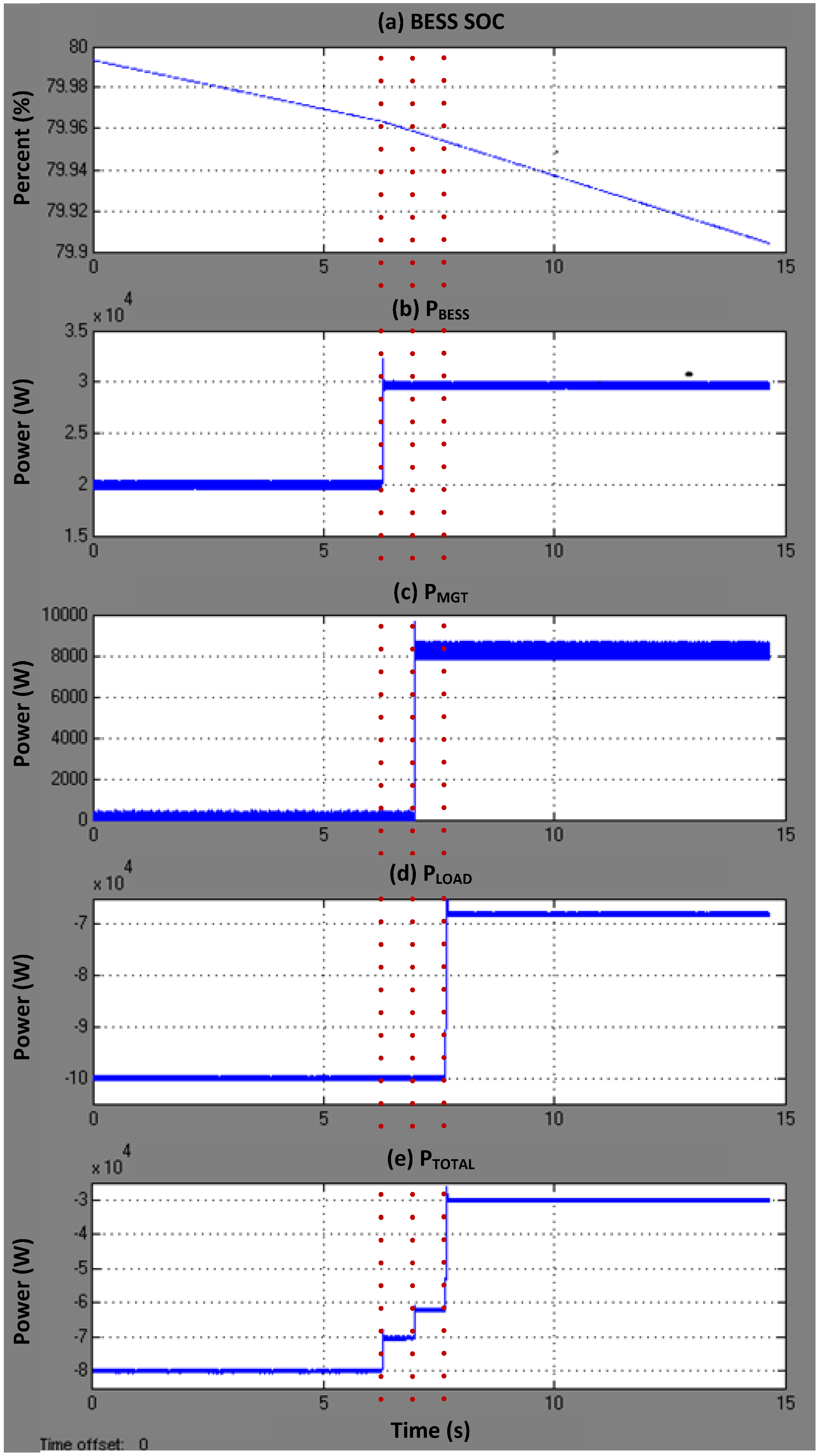
4.2.2. Case 2: Two-Round CNP Procedure
- The EDR event occurs at 14:00 or 1 hour after the peak hours. Therefore, the initial SOC of the BESS is 80% when the EDR request arrives;
- The controllable, critical and sensitive loads are measured as 17.0 kW, 15.0 kW, and 68.0 kW, respectively, at the moment.


5. Conclusions
Acknowledgments
Conflict of Interest
References
- Lasseter, R.H. Control and Design of Microgrid Components; PSERC Final Report; Power Systems Engineering Research Center: Ithaca, NY, USA, 2007. [Google Scholar]
- Hatziargyriou, N.; Asano, H.; Iravani, R.; Marnay, C. Microgrids. IEEE Power Energy Mag. 2007, 4, 78–94. [Google Scholar] [CrossRef]
- Saraiva, J.T.; Gomes, M.H. Provision of Some Ancillary Services by Microgrid Agents. In Proceedings of 7th International Conference on the European Energy Market, Madrid, Spain, 23–25 June 2010; pp. 1–8.
- Wooldridge, M. An Introduction to Multiagent Systems, 2nd ed.; John Wiley and Sons: Chichester, UK, 2009. [Google Scholar]
- Logenthiran, T.; Srinivasan, D.; Khambadkone, A.M. Multi-agent system for energy resource scheduling of integrated microgrids in a distributed system. Electr. Power Syst. Res. 2011, 81, 138–148. [Google Scholar] [CrossRef]
- Oyarzabal, J.; Jimeno, J.; Ruela, J.; Engler, A.; Hardt, C. Agent based Micro Grid Management System. In Proceedings of 2005 International Conference on Future Power Systems, Amsterdam, The Netherlands, 18 November 2005; p. 6.
- Lagorse, J.; Paire, D.; Miraoui, A. A multi-agent system for energy management of distributed power sources. Renew. Energy 2010, 35, 174–182. [Google Scholar] [CrossRef]
- Kim, H.; Kinoshita, T. A multiagent system for microgrid operation in the grid-connected mode. J. Electr. Eng. Tech. 2010, 5, 246–254. [Google Scholar] [CrossRef]
- Albadi, M.H.; El-Saadany, E.F. Demand Response in Electricity Markets: An Overview. In Proceedings of 2007 IEEE Power Engineering Society General Meeting, Tampa, FL, USA, 24–28 June 2007; pp. 1–5.
- Yoo, C.; Choi, W.; Chung, I.; Won, D.; Hong, S.; Jang, B. Hardware-in-the-Loop Simulation of DC Microgrid with Multi-Agent System for Emergency Demand Response. In Proceedings of IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 22–27 July 2012; pp. 1–6.
- Dufour, C.; Abourida, S.; Belanger, J. Hardware-in-the-Loop Simulation of Power Drives with RT-LAB. In Proceedings of International Conference on Power Electronics and Drives Systems (PEDS 2005), Kuala Lumpur, Malaysia, 28 November–1 December 2005; pp. 1646–1651.
- Kim, J.; Nam, Y.; Hahn, T.; Hong, H. Demand Response Program Implementation Practices in Korea. In Proceedings of 18th International Federation of Automatic Control (IFAC) World Congress, Milano, Italy, 2 September 2011; pp. 3704–3707.
- Yoo, T.; Kwon, H.; Lee, H.; Rhee, C.; Yoon, Y.; Park, J. Development of Reliability Based Demand Response Program in Korea. In Proceedings of IEEE PES Innovative Smart Grid Technologies (ISGT), Anaheim, CA, USA, 17–19 January 2011; pp. 1–6.
- Aalami, H.; Yousefi, G.R.; Moghadam, M.P. Demand Response Model Considering EDRP and TOU Programs. In Proceedings of Transmission and Distribution Conference and Exposition, Chicago, IL, USA, 21–24 April 2008; pp. 1–6.
- Wu, J. Contract Net Protocol for Coordination in Multi-Agent System. In Proceedings of 2nd International Symposium on Intelligent Information Technology Application, Shanghai, China, 20–22 December 2008; pp. 1052–1058.
- Zheng, L. ZigBee Wireless Sensor Network in Industrial Applications. In Proceedings of SICE-ICASE (The Society of Instrument and Control Engineers—The Institute of Control, Automation and System Engineers) International Joint Conference, Busan, Korea, 18–21 October 2006; pp. 1067–1070.
- Liu, C.; Fan, C. Zigbee-Research into integrated Real-Time Location Systems. In Proceedings of 2008 IEEE Asia-Pacific Services Computing Conference, Yilan, Taiwan, 9–12 December 2008; pp. 942–947.
- Bai, Y.; Hung, C. Remote Power On/Off Control and Current Measurement for Home Electric Outlets based on a Low-Power Embedded Board and Zigbee Communication. In Proceedings of IEEE International Symposium on Consumer Electronics, Vilamoura, Portugal, 14–16 April 2008; pp. 1–4.
- Saito, H.; Kagami, O.; Umehira, M.; Kado, Y. Wide area ubiquitous network: The network operator’s view of a sensor network. IEEE Commun. Mag. 2008, 46, 112–120. [Google Scholar] [CrossRef]
- Ren, W.; Sloderbeck, M.; Steurer, M.; Dinavahi, V.; Noda, T.; Filizadeh, S.; Chevrefils, A.R.; Matar, M.; Iravani, R.; Dufour, C. Interfacing issues in real-time digital simulators. IEEE Trans. Power Deliv. 2011, 26, 1221–1230. [Google Scholar] [CrossRef]
© 2013 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Oh, S.-J.; Yoo, C.-H.; Chung, I.-Y.; Won, D.-J. Hardware-in-the-Loop Simulation of Distributed Intelligent Energy Management System for Microgrids. Energies 2013, 6, 3263-3283. https://doi.org/10.3390/en6073263
Oh S-J, Yoo C-H, Chung I-Y, Won D-J. Hardware-in-the-Loop Simulation of Distributed Intelligent Energy Management System for Microgrids. Energies. 2013; 6(7):3263-3283. https://doi.org/10.3390/en6073263
Chicago/Turabian StyleOh, Sang-Jin, Cheol-Hee Yoo, Il-Yop Chung, and Dong-Jun Won. 2013. "Hardware-in-the-Loop Simulation of Distributed Intelligent Energy Management System for Microgrids" Energies 6, no. 7: 3263-3283. https://doi.org/10.3390/en6073263
APA StyleOh, S. -J., Yoo, C. -H., Chung, I. -Y., & Won, D. -J. (2013). Hardware-in-the-Loop Simulation of Distributed Intelligent Energy Management System for Microgrids. Energies, 6(7), 3263-3283. https://doi.org/10.3390/en6073263