Satellite Lithium-Ion Battery Remaining Cycle Life Prediction with Novel Indirect Health Indicator Extraction


Abstract
:1. Introduction
2. Framework for Satellite Battery Remaining Cycle Life Estimation
2.1. Novel HI Extraction with Monitoring Parameters

- Step 1.
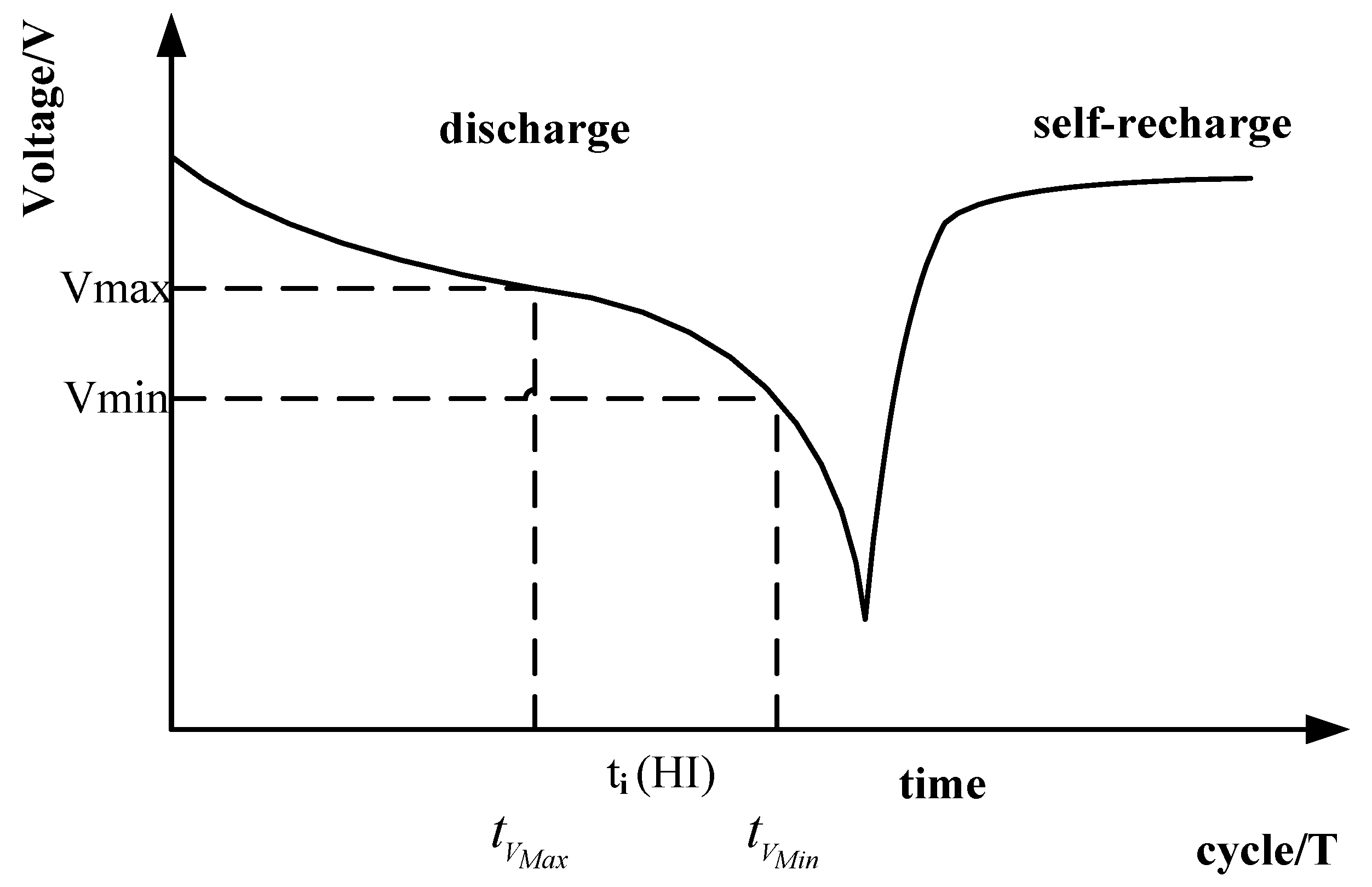
- Extract the monitoring voltage, current, and cycle index in each charging/discharging cycle under the constant-voltage and restricted-current mode;
- Step 2.
- Define the discharging voltage interval (Vmax and Vmin) and extract the health indicating time series. Here, Vmax (Vmin) is the maximum (minimum) voltage value used as the starting (ending) signal to count the number of discharging time intervals. Thus, the time interval corresponding to discharging voltage between Vmax and Vmin can be obtained as shown in Equation (1);
- Step 3.
- Convert the time interval difference corresponding to the Vmax − Vmin, to obtain the TIEDVD series in each cycle as shown in Equation (2).
- Step 1.
- Prepare the verified series and referred series. The verified series is the constructed TIEDVD series defined as Xi = {xi(k)|k = 1,2,…,n}, i = 1,2,…,m, and the referred series is the capacity series defined as Y = {y(k)|k = 1,2,…,n} (n is the length of series and m is the number of verified series);
- Step 2.
- Compute the correlation coefficient. The correlation coefficient of y(k) and xi(k) is:where is the identification coefficient. A small ρ indicates high identification ability, and the general range of ρ is between 0 and 1. Generally, high identification ability can be obtained when ρ ≤ 0.5463. As a result, ρ is usually set to be 0.5;
- Step 3.
- Compute the correlation level. The correlation level ri is defined as:
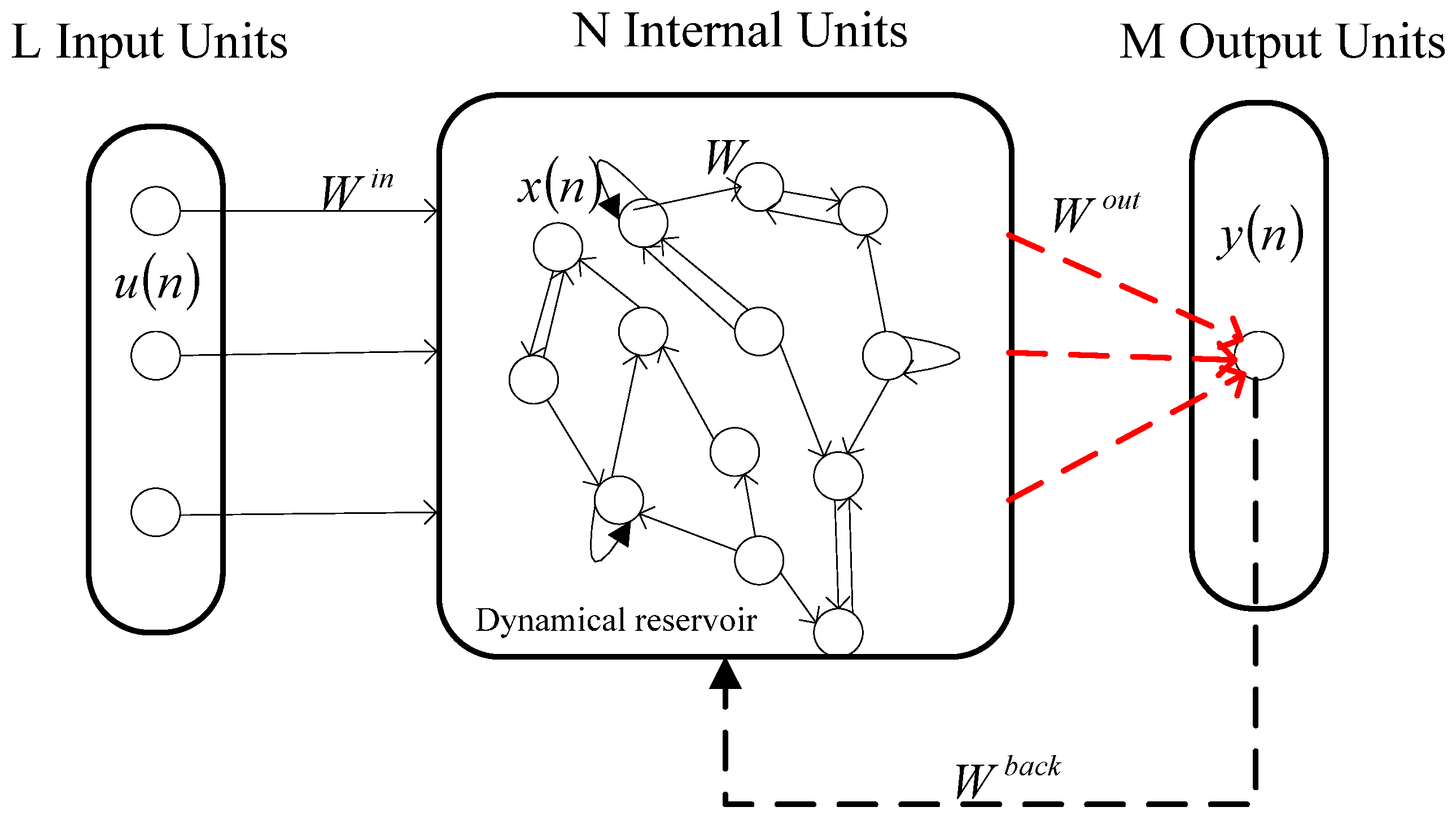
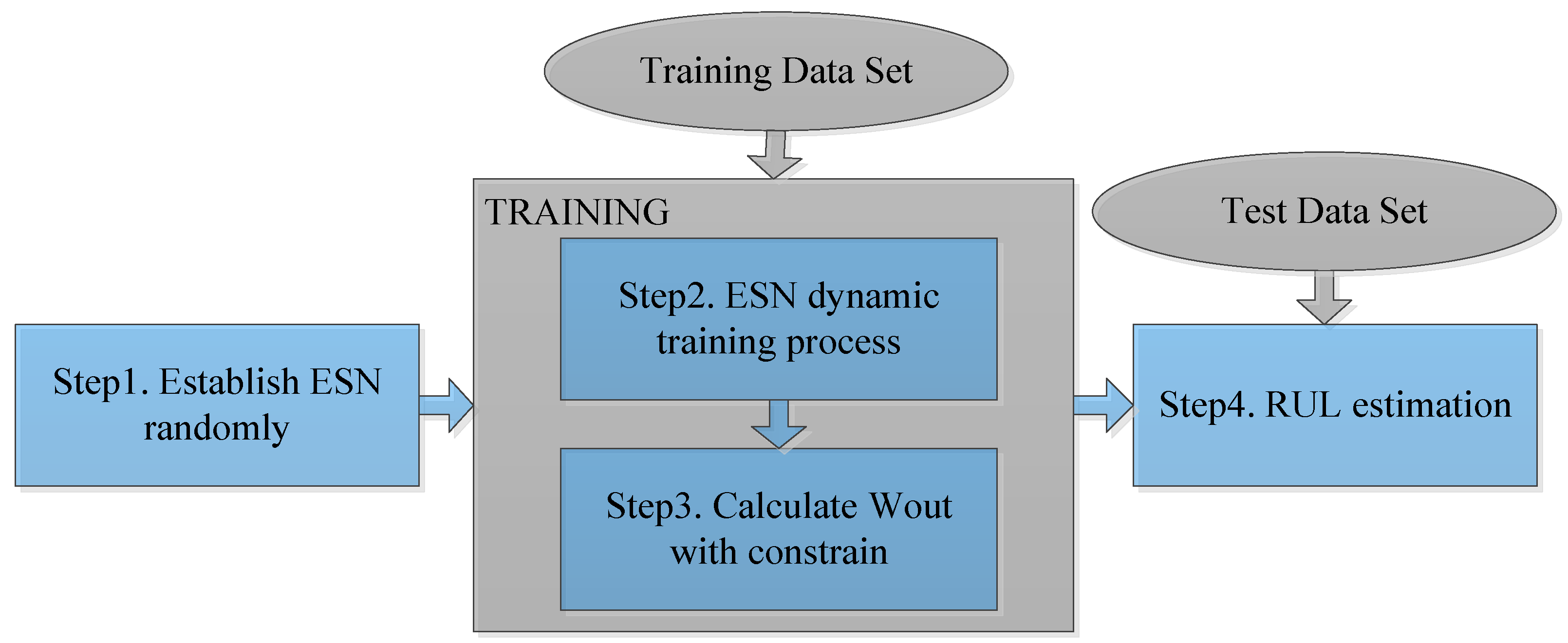
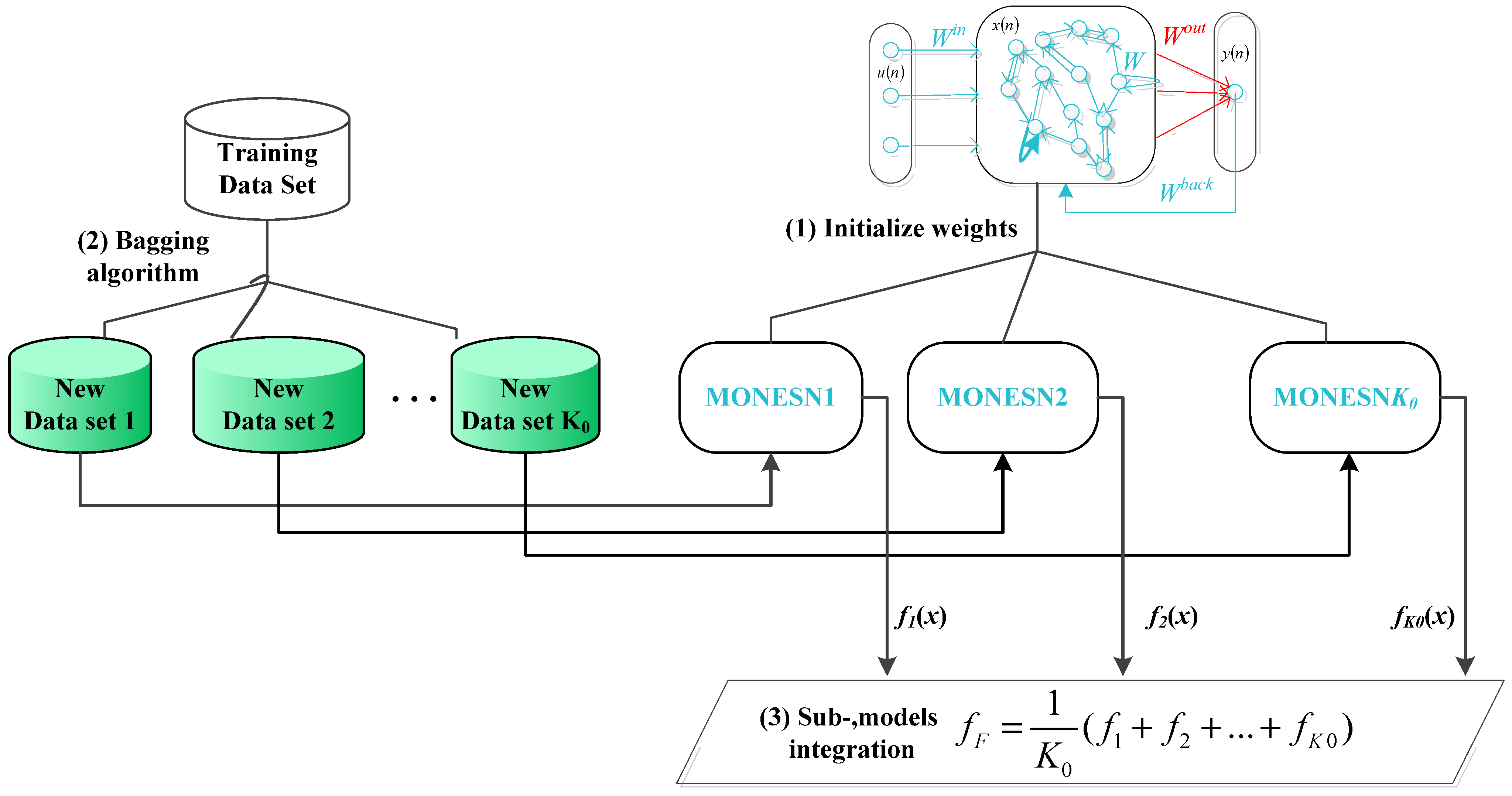
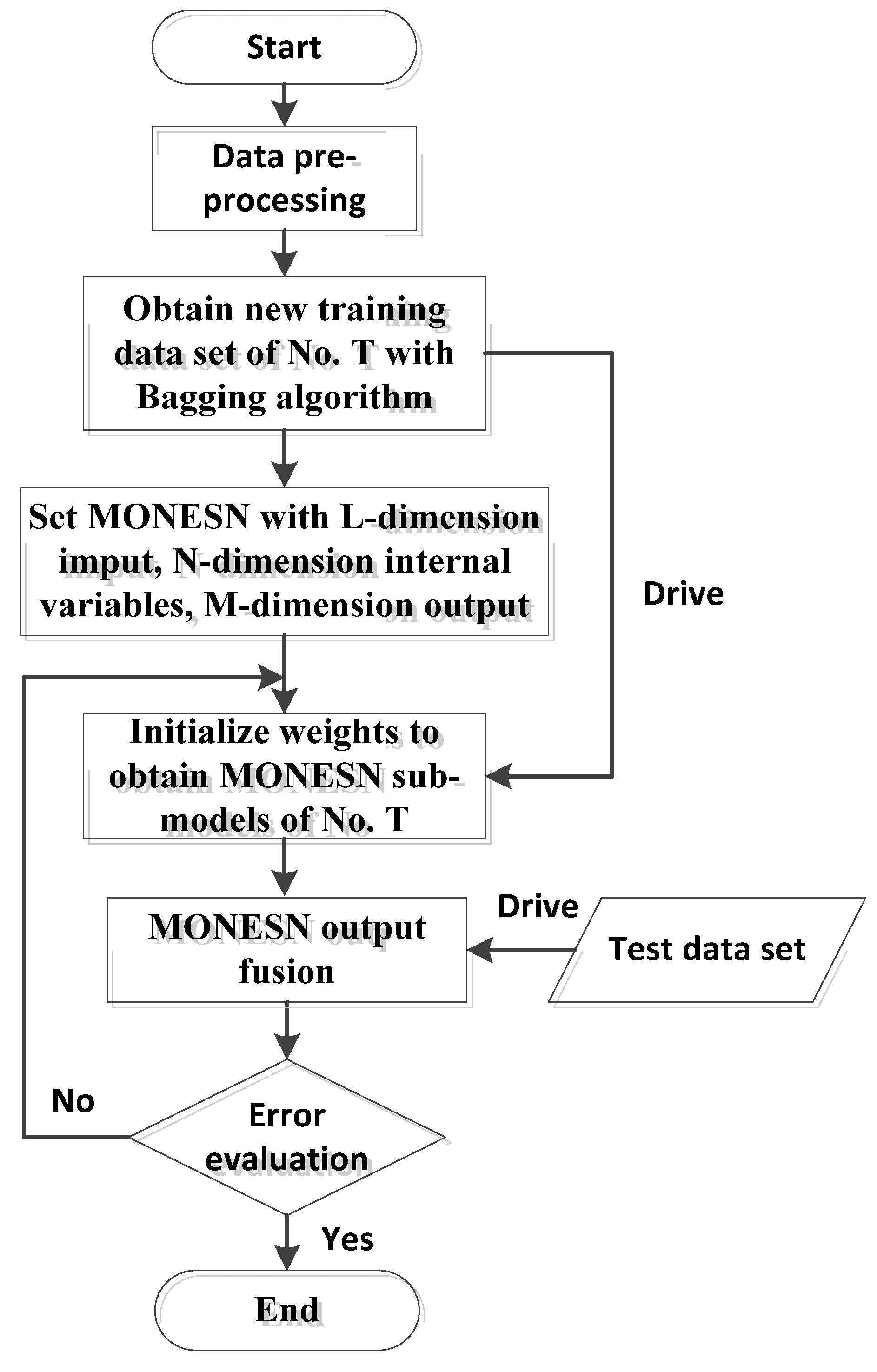
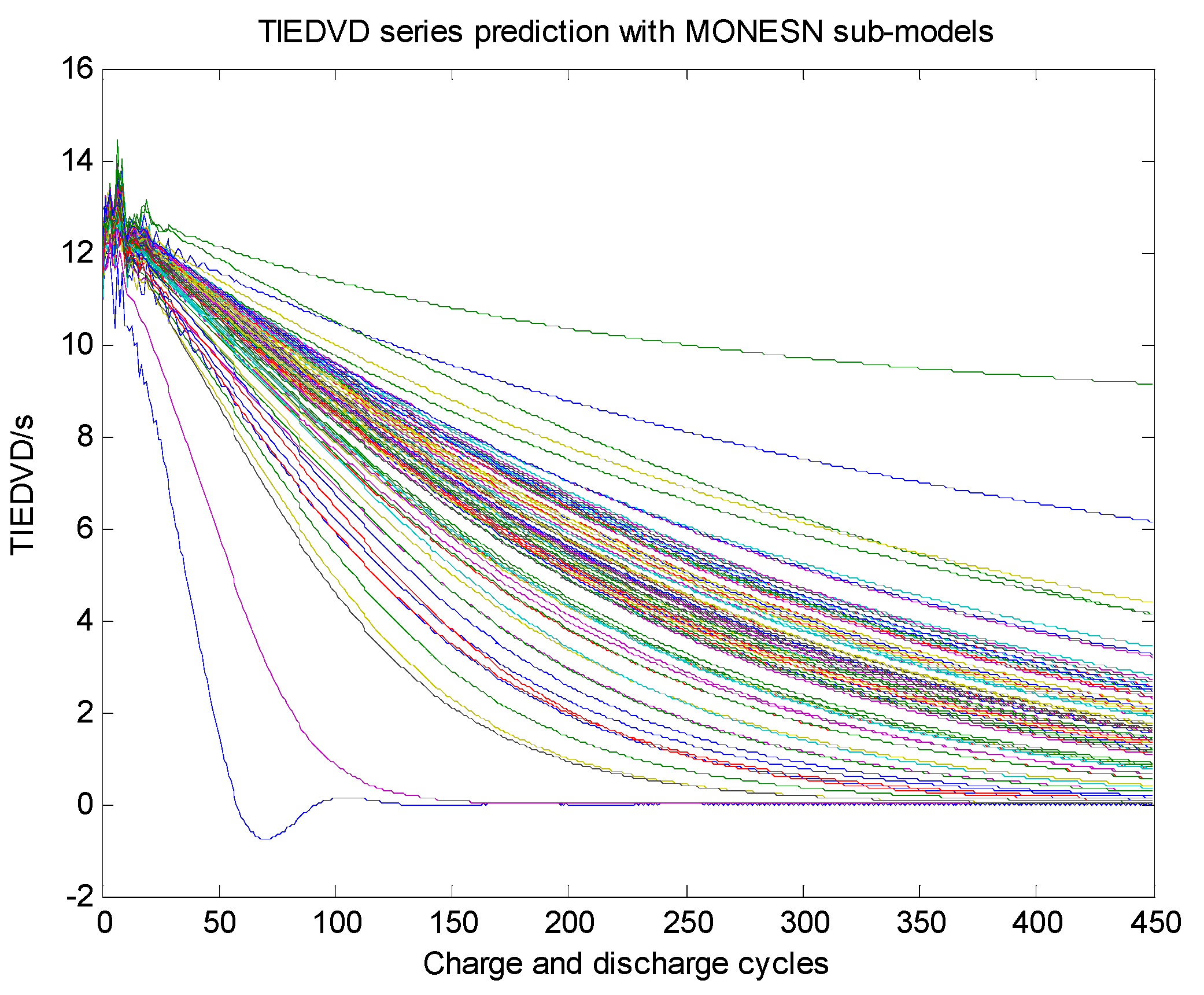
2.2. En_MONESN for RUL Estimation




3. Experiments and Test Data
- (1)
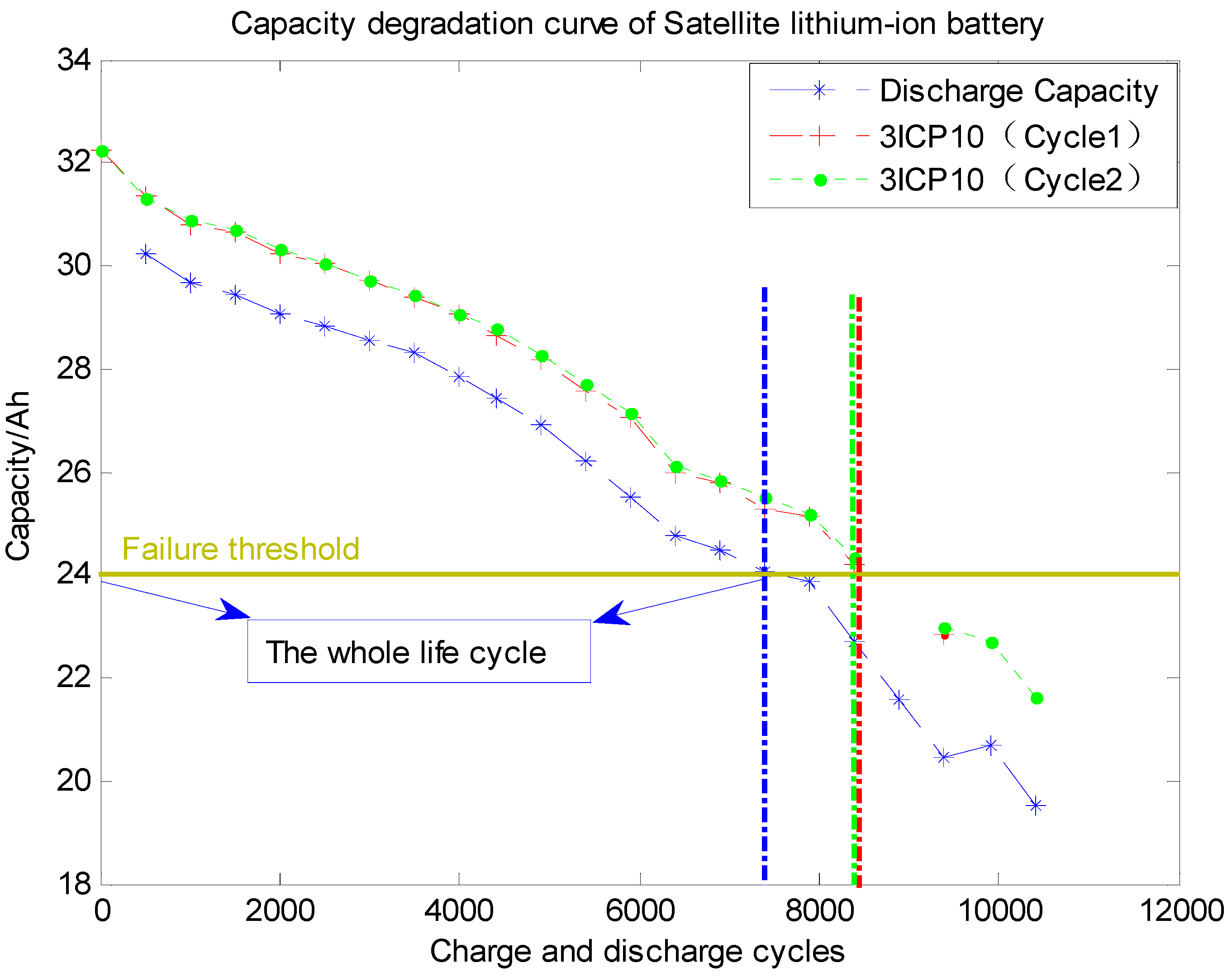
- The test is conducted by charging and discharging the batteries (simulating the condition of LEO orbit);
- (2)
- The 30-Ah batteries (3 × 10 Ah) are first discharged with 0.6 C for 30 min, and then charged with 0.3 C until the voltage reaches 4.1 V and finally charged with constant charging voltage. The total charging time is 60 min;
- (3)
- The charging depth is 30% DOD and the capacity of the batteries is measured every 500 cycles;
- (4)
- The parameters of voltage, current, etc. are sampled every 30 s and we store the measured data into test file.

4. Results and Discussion
4.1. Indirect HI Extraction and Evaluation

4.2. Evaluation Criterion
- (1)
- Root Mean Square Error (RMSE): to evaluate the local prediction accuracy:
- (2)
- R2: to evaluate the prediction performance. If the prediction result is good, R2 will be close to 1:
- (3)
- RULerror (RUL predicted Errors): to evaluate the prediction accuracy of RUL:
- (4)
- Standard Deviation (Std): to evaluate the stability by determining the bias of the predicted RUL with En_MONESN:
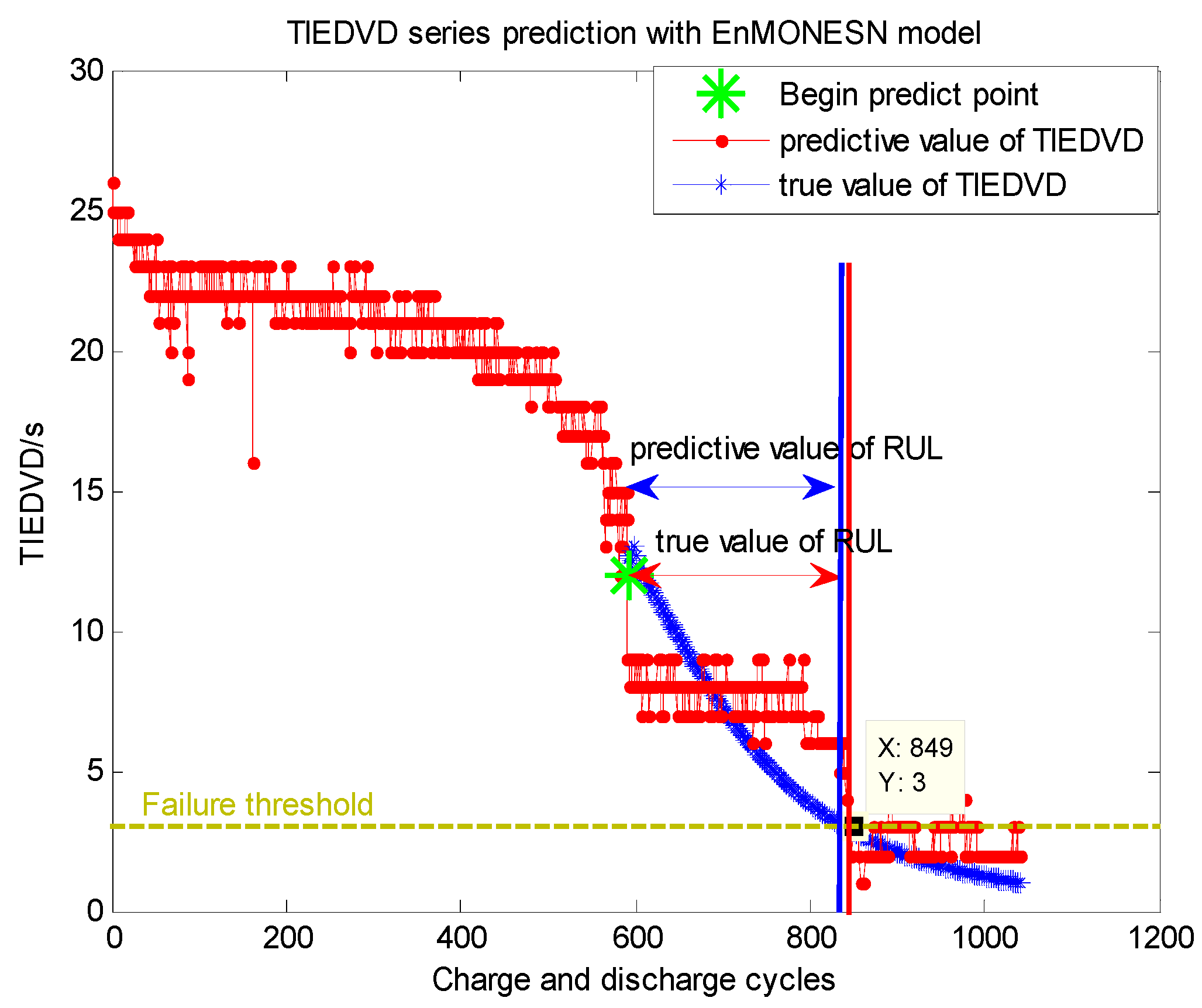
4.3. Satellite Lithium-Ion Battery RUL Prediction
- ➢
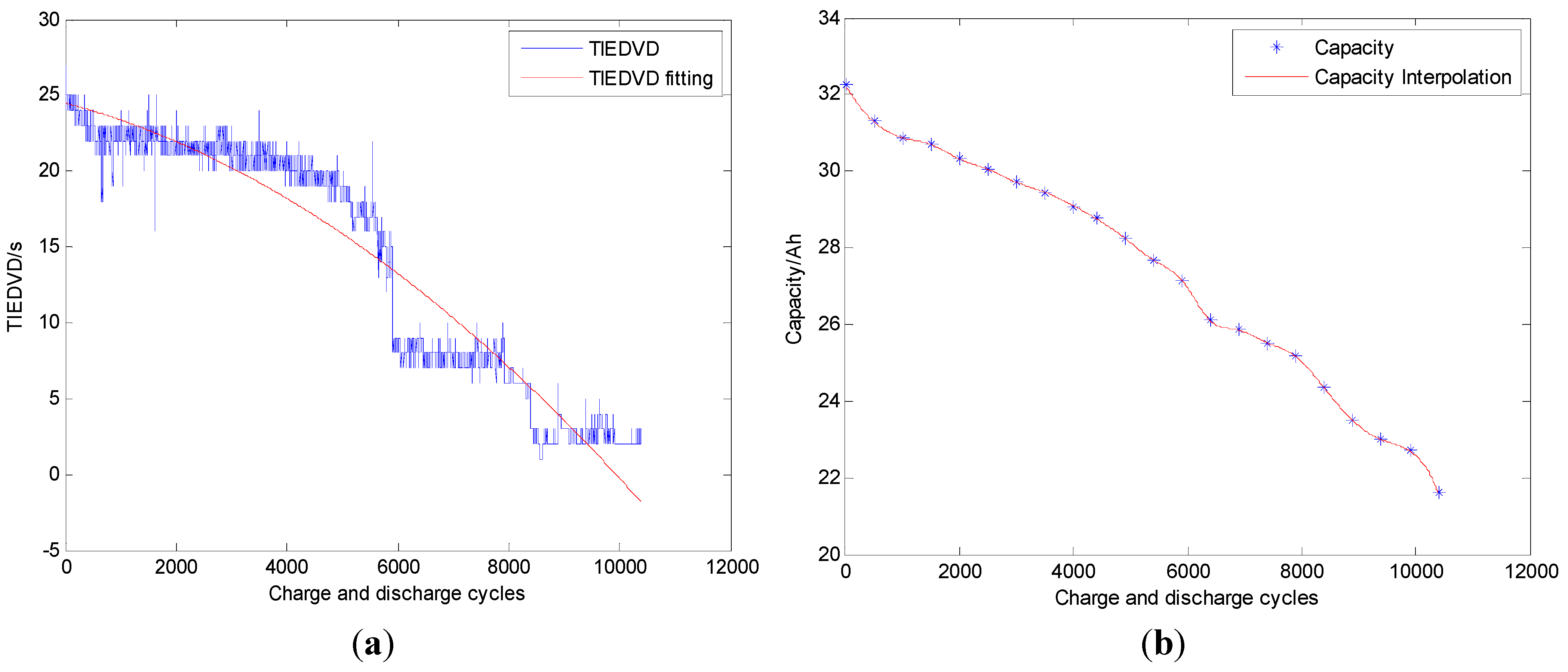
- Outlier detection and elimination;
- ➢
- Sequence fitting of TIEDVD series;
- ➢
- Re-sampling the TIEDVD series to reduce the data samples, the strategy is to re-sample one point in each ten samples.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods/Criterion | RMSE | R2 | RULerror | Std |
|---|---|---|---|---|
| ESN | 1.8312 | 0.7184 | 400 | - |
| MONESN | 1.8143 | 0.7197 | 250 | - |
| En_MONESN | 1.7270 | 0.7146 | 90 | - |
| ESN (100) | 2.5859 | 0.6145 | 732 | 2383.4036 |
| MONESN (100) | 2.4570 | 0.5539 | 390 | 519.2168 |
| En_MONESN (100) | 1.7441 | 0.7145 | 293 | 120.4061 |
5. Conclusions
Acknowledgments
Conflict of Interest
References
- Zhang, J.; Lee, J. A review on prognostics and health monitoring of Li-ion battery. J. Power Sources 2011, 196, 6007–6014. [Google Scholar] [CrossRef]
- He, W.; Williard, N.; Osterman, M.; Pecht, M. Prognostics of lithium-ion batteries based on Dempster-Shafer theory and the Bayesian Monte Carlo method. J. Power Sources 2011, 196, 10314–10321. [Google Scholar] [CrossRef]
- Halpert, G.; Flood, D.J.; Sabripour, S. Spacecraft Power Technology; Imperial College Press: London, UK, 2000. [Google Scholar]
- Wang, D.; Li, G.; Pan, Y. The technology of Lithium-ion batteries for spacecraft application. Aerospa. Shanghai 2000, 17, 54–59. [Google Scholar]
- Xing, Y.; Ma, E.; Tsui, K.L.; Pecht, M. Battery management system in electric and hybrid vehicles. Energies 2011, 4, 1840–1857. [Google Scholar] [CrossRef]
- Saha, B.; Goebel, K.; Poll, S.; Christophersen, J. Prognostics methods for battery health monitoring using a Bayesian framework. IEEE T. Instrum. Meas. 2009, 58, 291–297. [Google Scholar] [CrossRef]
- Rufus, F.; Lee, S.; Thakker, A. Health Monitoring Algorithms for Space Application Batteries. In Proceedings of International Conference on Prognostics and Health Management 2008, Denver, CO, USA, 6–9 October 2008; pp. 1–8.
- Saha, B.; Goebel, K.; Christophersen, J. Comparison of prognostic algorithms for estimating remaining useful life of batteries. Trans. Inst. Meas. Control 2009, 31, 293–308. [Google Scholar] [CrossRef]
- Liu, J.; Saxena, A.; Goebel, K.; Saha, B.; Wang, W. An Adaptive Recurrent Neural Network For Remaining Useful Life Prediction Of Lithium-Ion Batteries. In Proceedings of Annual Conference of the Prognostics and Health Management Society 2010, Portland, OR, USA, 10–14 October 2010; pp. 1–10.
- Kozlowski, J.D. Electrochemical Cell Prognostics Using Online Impedance Measurements and Model-Based Data Fusion Techniques. In Proceedings of the 2003 IEEE Aerospace Conference, Big Sky, MT, USA, 8–15 March 2003; pp. 3257–3270.
- Liu, J.; Wang, W.; Ma, F.; Yang, Y.; Yang, C.A. A data-model-fusion prognostic framework for dynamic system state forecasting. Eng. Appl. Artif. Intell. 2012, 25, 814–823. [Google Scholar] [CrossRef]
- Xing, Y.; Ma, E.; Tsui, K.L.; Pecht, M. An ensemble model for predicting the remaining useful performance of Lithium-ion batteries. Microelectron. Reliab. 2013, 53, 811–820. [Google Scholar] [CrossRef]
- Liu, J.; Wang, W.; Golnaraghi, F. A multi-step predictor with a variable input pattern for system state forecasting. Mech. Syst. Signal Process. 2009, 23, 1586–1599. [Google Scholar] [CrossRef]
- Olivares, B.E.; Cerda Munoz, M.A.; Orchard, M.E.; Silva, J.F. Particle-filtering-based prognosis framework for energy storage devices with a statistical characterization of state-of-health regeneration phenomena. IEEE Trans. Instrum. Meas. 2013, 62, 364–376. [Google Scholar] [CrossRef]
- He, W.; Williard, N.; Osterman, M.; Pecht, M. Prognostics of Lithium-Ion Batteries Using Extended Kalman Filtering. In Proceedings of IMAPS Advanced Technology Workshop on High Reliability Microelectronics for Military Applications, Linthicum Heights,, MD, USA, 17–19 May 2011; pp. 1–4.
- Peng, Y.; Xu, Y.; Liu, D.; Peng, X. A Sensor Selection Method Based on Improved Grey Correlation Analysis for RUL Evaluation of Complex Engineered Systems. In Proceedings of Annual Conference of the Prognostics and Health Management Society 2012, New Orleans, LA, USA, 14–17 October 2013; pp. 1–8.
- Jaeger, H.; Haas, H. Harnessing nonlinearity: Predicting chaotic systems and saving energy in wireless telecommunication. Science 2004, 308, 78–80. [Google Scholar] [CrossRef]
- Jaeger, H.; Lukosevicius, M.; Popovici, D. Optimization applications of echo state networks with leaky integrator neurons. Neural Netw. 2007, 20, 335–352. [Google Scholar] [CrossRef] [PubMed]
- Sill, J. Monotonic Networks. In Advances in Neural Information Processing Systems (NIPS); MIT Press: Cambridge, MA, USA, 1998; Volume 10, pp. 661–667. [Google Scholar]
- Minin, A.; Velikova, M.; Lang, B.; Daniels, H. Comparison of universal approximators incorporating partial monotonicity by structure. Neural Netw. 2010, 23, 471–475. [Google Scholar] [CrossRef] [PubMed]
- Parviz, M.; Moin, S. Boosting approach for score level fusion in multimodal biometrics based on AUC maximization. J. Inf. Hiding Multimed. Signal Process 2011, 2, 51–59. [Google Scholar]
- Kaganami, H.G.; Ali, S.K.; Zou, B. Optimal approach for texture analysis and classification based on wavelet transform and neural network. J. Inf. Hiding Multimed. Signal Process 2011, 2, 33–40. [Google Scholar]
© 2013 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Liu, D.; Wang, H.; Peng, Y.; Xie, W.; Liao, H. Satellite Lithium-Ion Battery Remaining Cycle Life Prediction with Novel Indirect Health Indicator Extraction. Energies 2013, 6, 3654-3668. https://doi.org/10.3390/en6083654
Liu D, Wang H, Peng Y, Xie W, Liao H. Satellite Lithium-Ion Battery Remaining Cycle Life Prediction with Novel Indirect Health Indicator Extraction. Energies. 2013; 6(8):3654-3668. https://doi.org/10.3390/en6083654
Chicago/Turabian StyleLiu, Datong, Hong Wang, Yu Peng, Wei Xie, and Haitao Liao. 2013. "Satellite Lithium-Ion Battery Remaining Cycle Life Prediction with Novel Indirect Health Indicator Extraction" Energies 6, no. 8: 3654-3668. https://doi.org/10.3390/en6083654
APA StyleLiu, D., Wang, H., Peng, Y., Xie, W., & Liao, H. (2013). Satellite Lithium-Ion Battery Remaining Cycle Life Prediction with Novel Indirect Health Indicator Extraction. Energies, 6(8), 3654-3668. https://doi.org/10.3390/en6083654