Adaptive State of Charge Estimation for Li-Ion Batteries Based on an Unscented Kalman Filter with an Enhanced Battery Model



Abstract
:1. Introduction
2. An Enhanced Battery Model
2.1. The Process Model






2.2. The Measurement Model
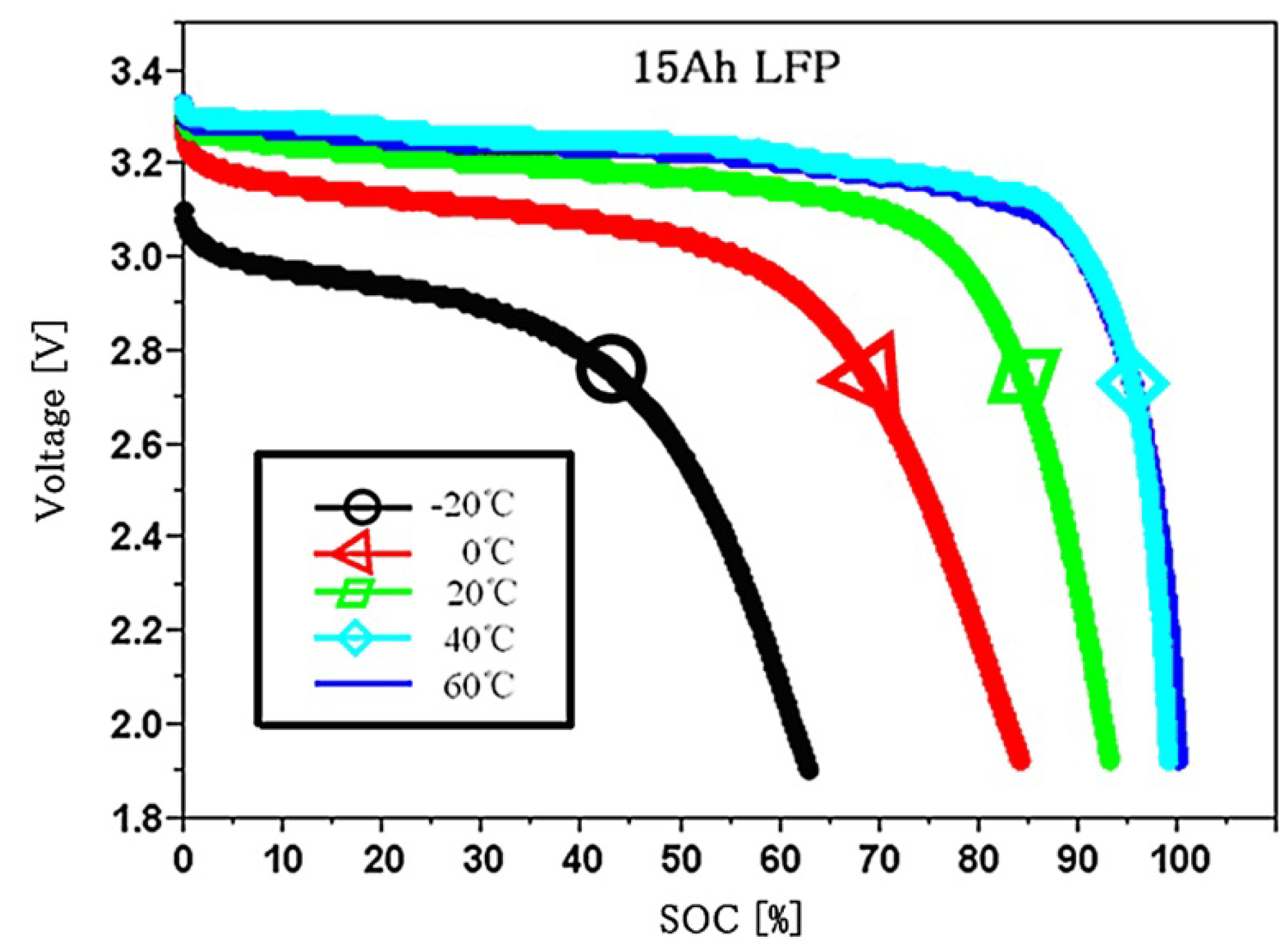
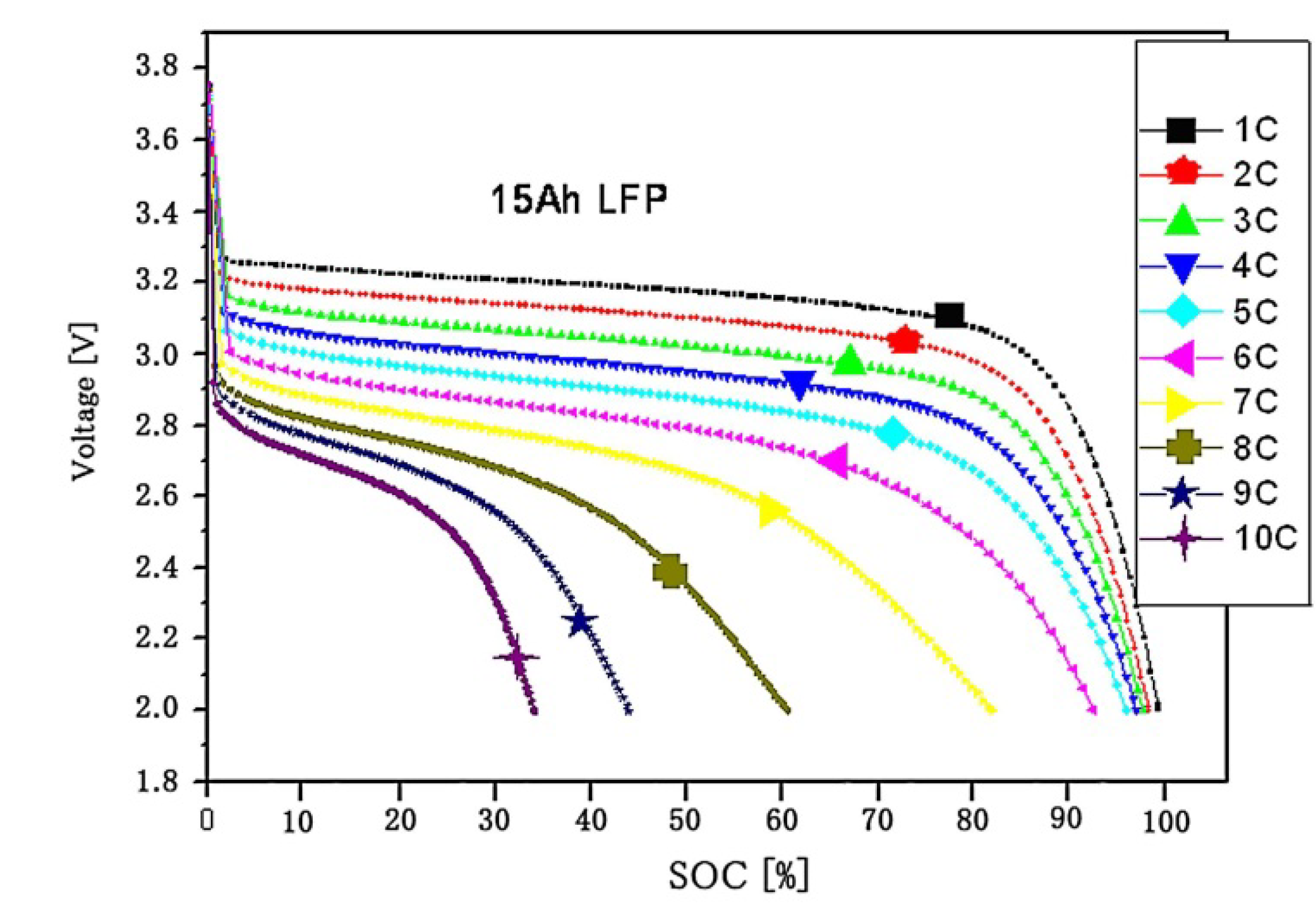
2.3. Model Parameters Determination
3. UKF-Based SOC Estimation
3.1. UKF-Based SOC Estimation
 in the UKF-based SOC estimation have the following form:
in the UKF-based SOC estimation have the following form: 
- •
- Initialization (Actually, the initial state and covariance are not critical to the UKF algorithm; they can converge to the true value quickly. Random values are used here):
![Energies 06 04134 i007]()
- •
- For k = 1,2...,∞:








 and
and  . Generally, we can choose 0 ≤ α ≤ 1, β ≥ 0. The weights may be optimally chosen to asymptotically minimize error variances in the sense of the Cramer-Rao lower bound or the maximum-likelihood estimates, when the noise statistics are available. Turner et al. [30] proposed a method to determine optimally of parameters for the UKF under Gaussian noise. For practical systems in which noise characteristics are often unknown, tuning of the weighting is part of the design iteration process. However, the optimal selection of the parameters is outside the scope of this paper; thus, the often-recommended parameters α = 1, β = 0 are used instead.
. Generally, we can choose 0 ≤ α ≤ 1, β ≥ 0. The weights may be optimally chosen to asymptotically minimize error variances in the sense of the Cramer-Rao lower bound or the maximum-likelihood estimates, when the noise statistics are available. Turner et al. [30] proposed a method to determine optimally of parameters for the UKF under Gaussian noise. For practical systems in which noise characteristics are often unknown, tuning of the weighting is part of the design iteration process. However, the optimal selection of the parameters is outside the scope of this paper; thus, the often-recommended parameters α = 1, β = 0 are used instead.  is the i − th column of the square root matrix of the matrix
is the i − th column of the square root matrix of the matrix  .
. :
: 
 of the estimated state:
of the estimated state: 
 :
: 
 of the estimated measurement
of the estimated measurement  :
: 
 of Xk-1 and Yk|k-1:
of Xk-1 and Yk|k-1: 

 :
:

 of state update :
of state update : 
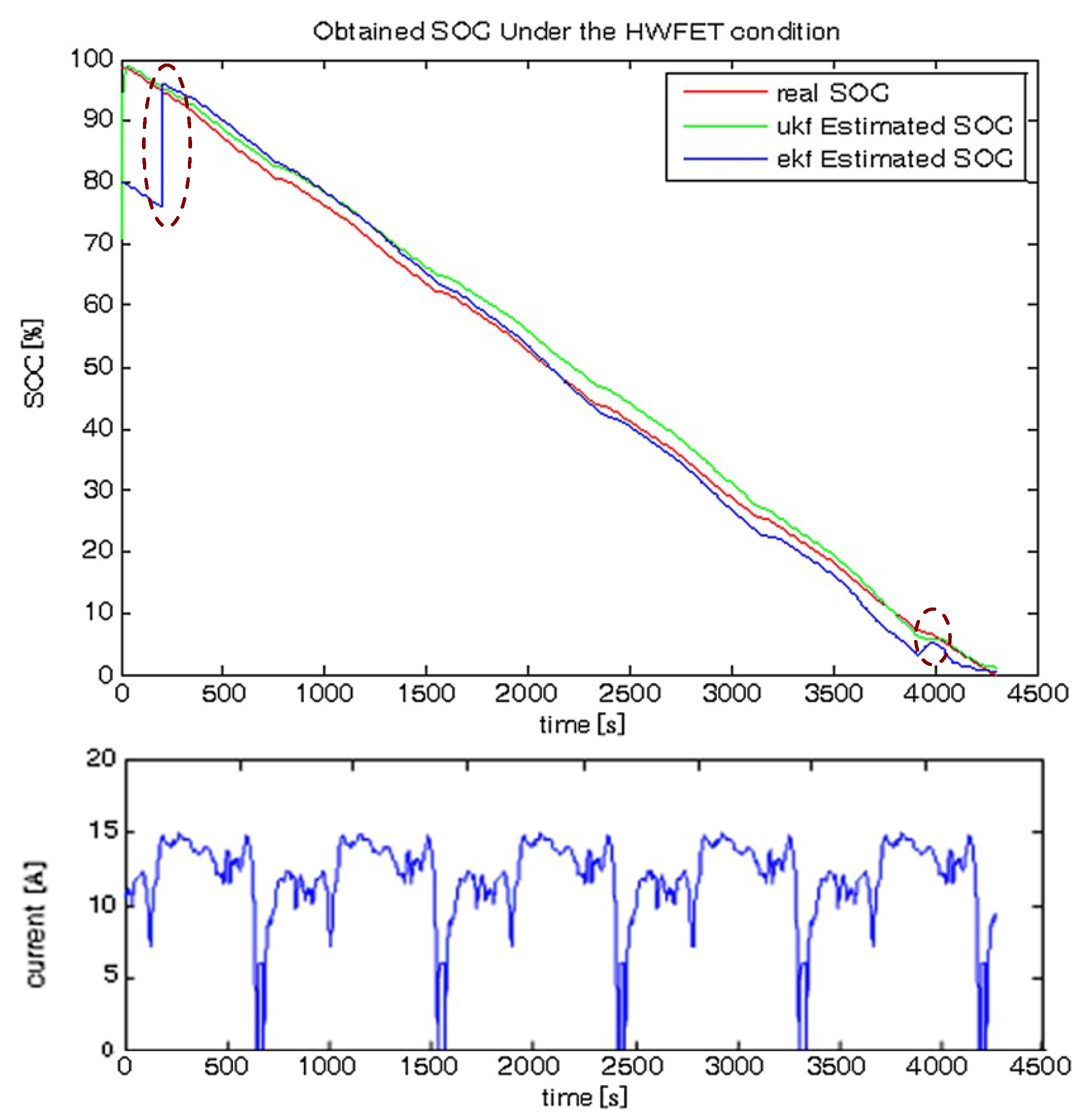
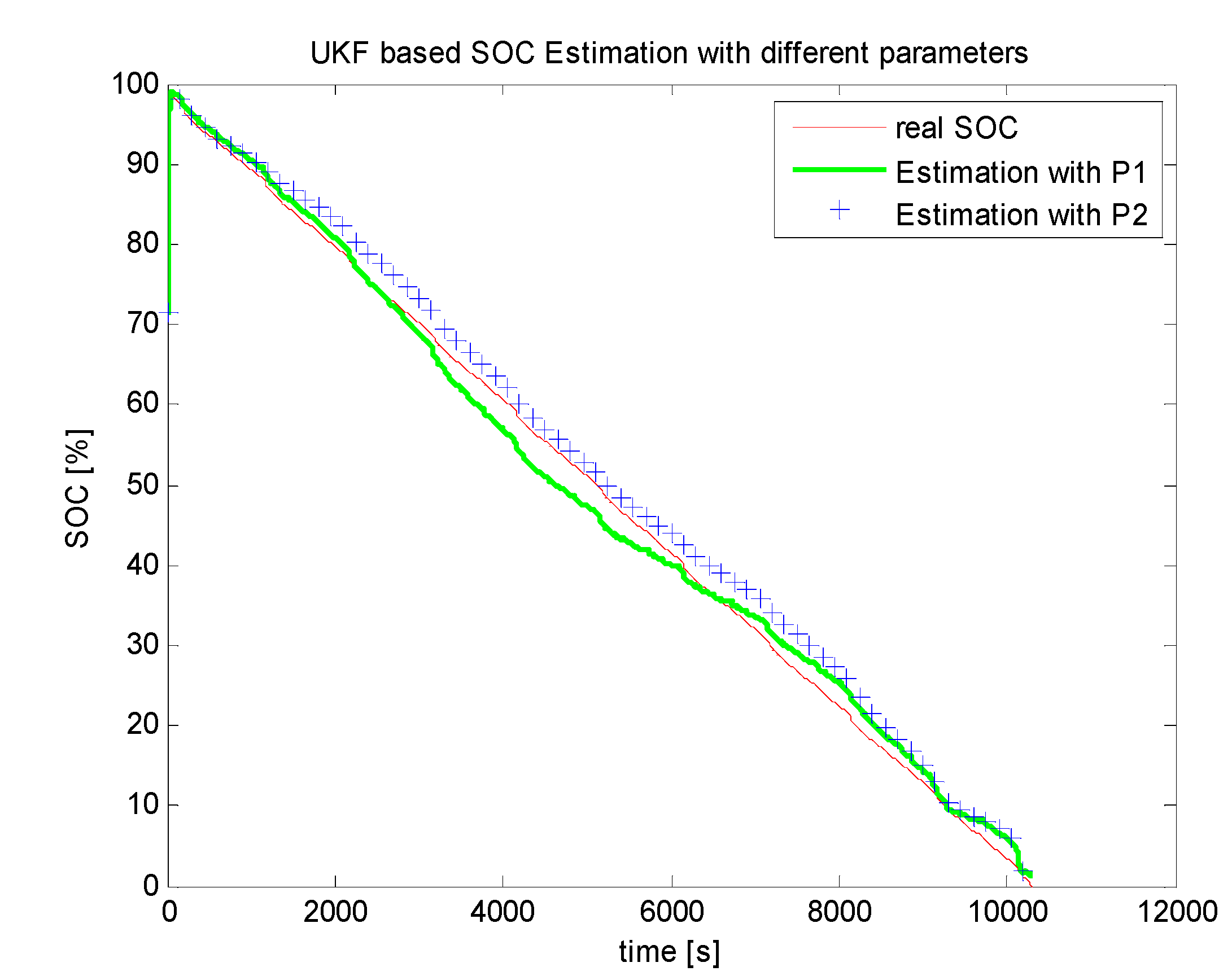
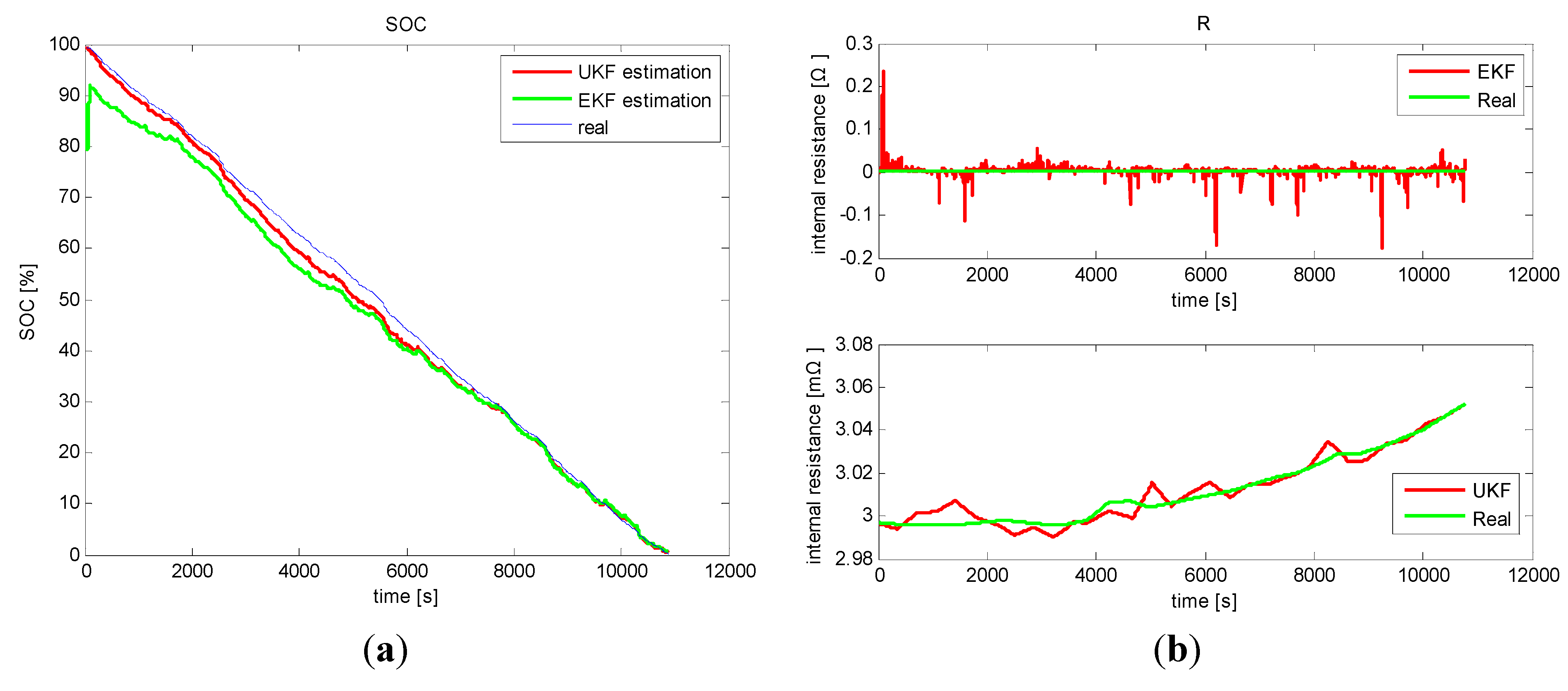
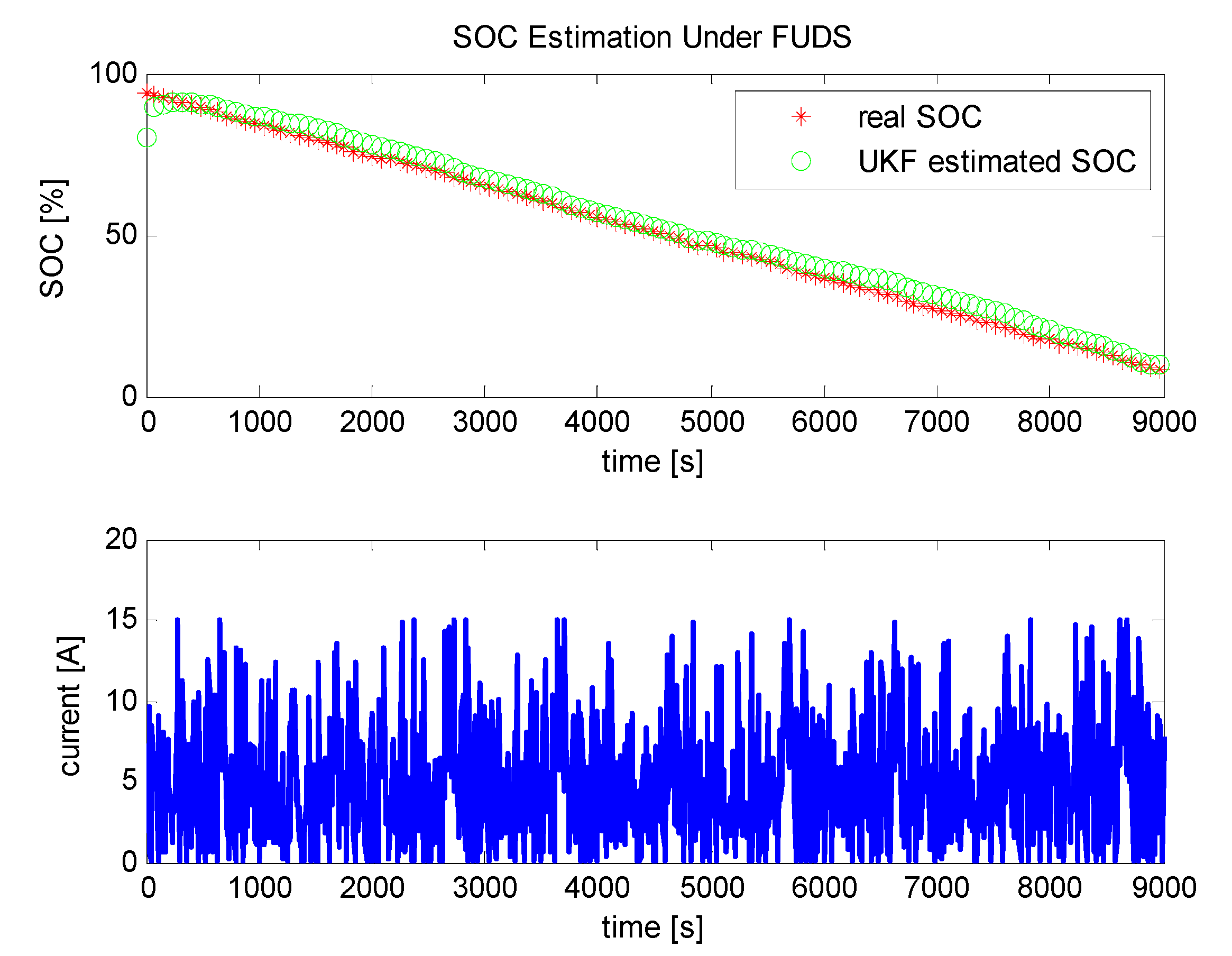
3.2. SOC Estimation Results


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Maximum error | Mean error | Mean square error | Speed |
|---|---|---|---|---|
| UKF | 5.1% | 3.8% | 4.89 × 10−4 | 1.49 ms/sample |
| EKF | 19.8% | 5.5% | 2.1 × 10−3 | 2.91 ms/sample |

4. UKF-Based SOC and Internal Resistance Joint Estimation

 as follows:
as follows:



 and
and  and are process noise and measurement noise, respectively.
and are process noise and measurement noise, respectively. and
and  are extensions of Equations (9) and (10), respectively. is now defined as follows:
are extensions of Equations (9) and (10), respectively. is now defined as follows:  has the same form as
has the same form as  in Equation (10).
in Equation (10).
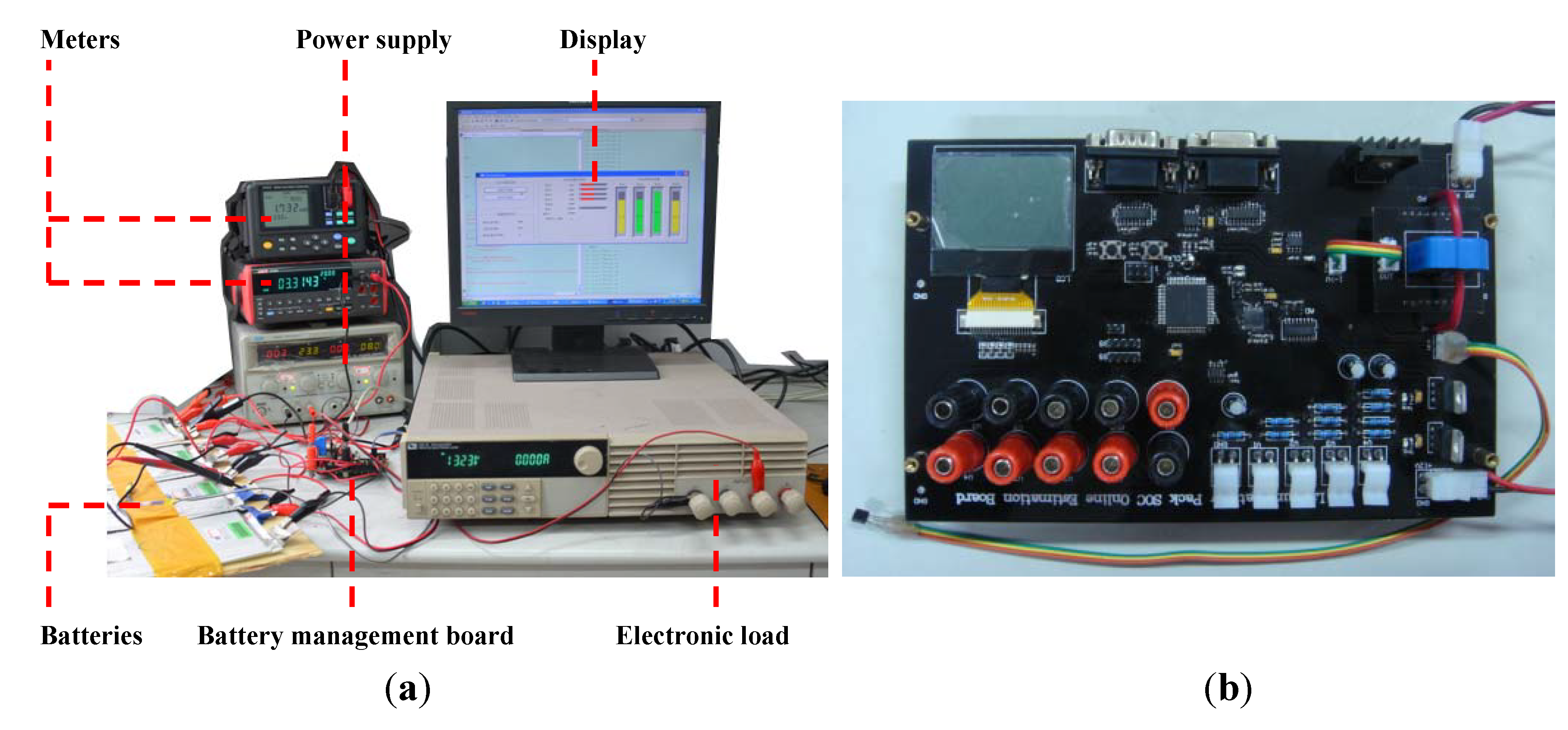
5. Experimental Verification
5.1. System Setup

| Type # | Chemistry | Nominal voltage (V) | Nominal capacity (Ah) | Manufacturer |
|---|---|---|---|---|
| 1 | LiFePO4 | 3.2 | 15 | Wan Xiang |
| 2 | Li-Mn | 3.7 | 10 | Yi Mao |
| 3 | LiFePO4 | 3.2 | 50 | Yi Mao |
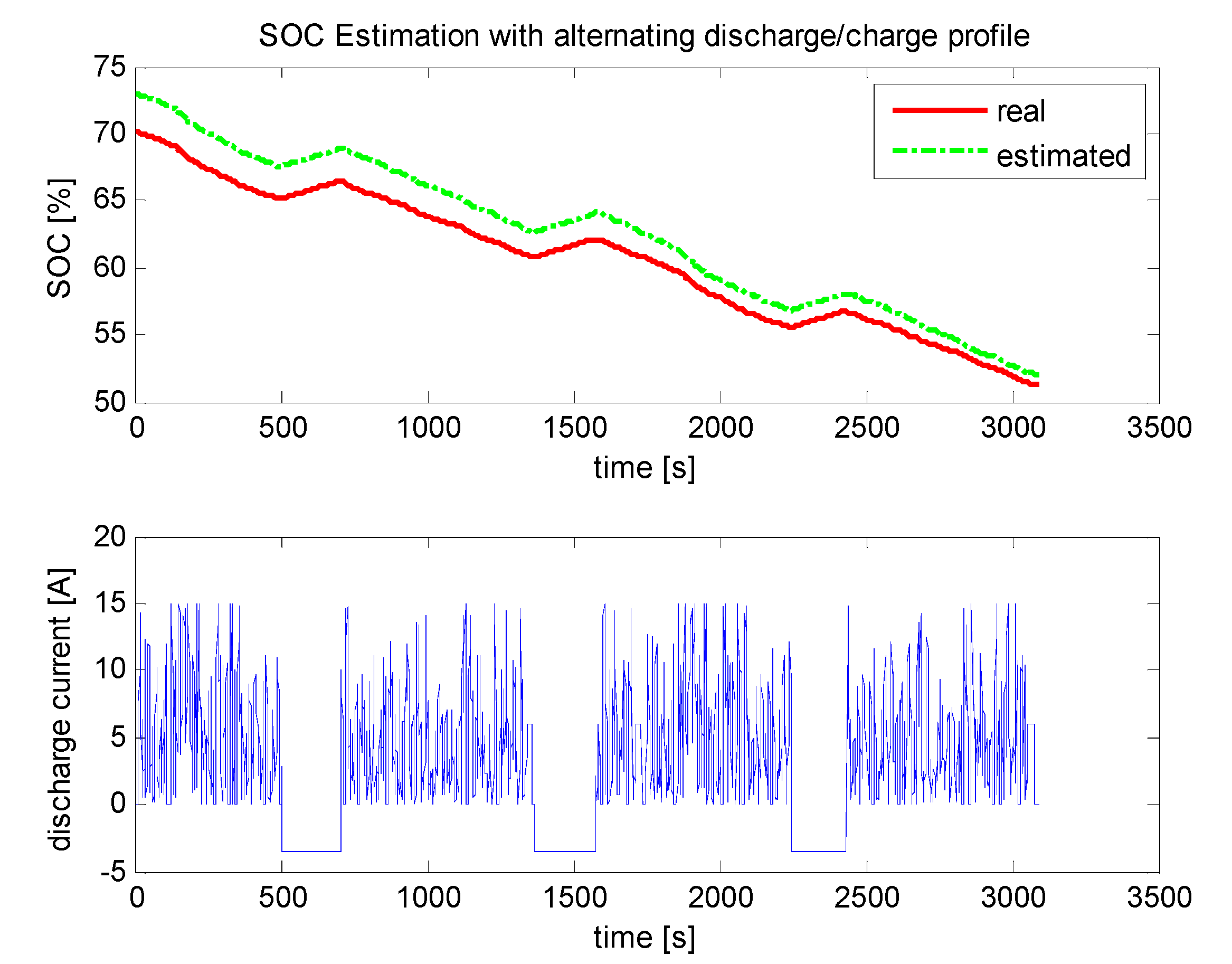
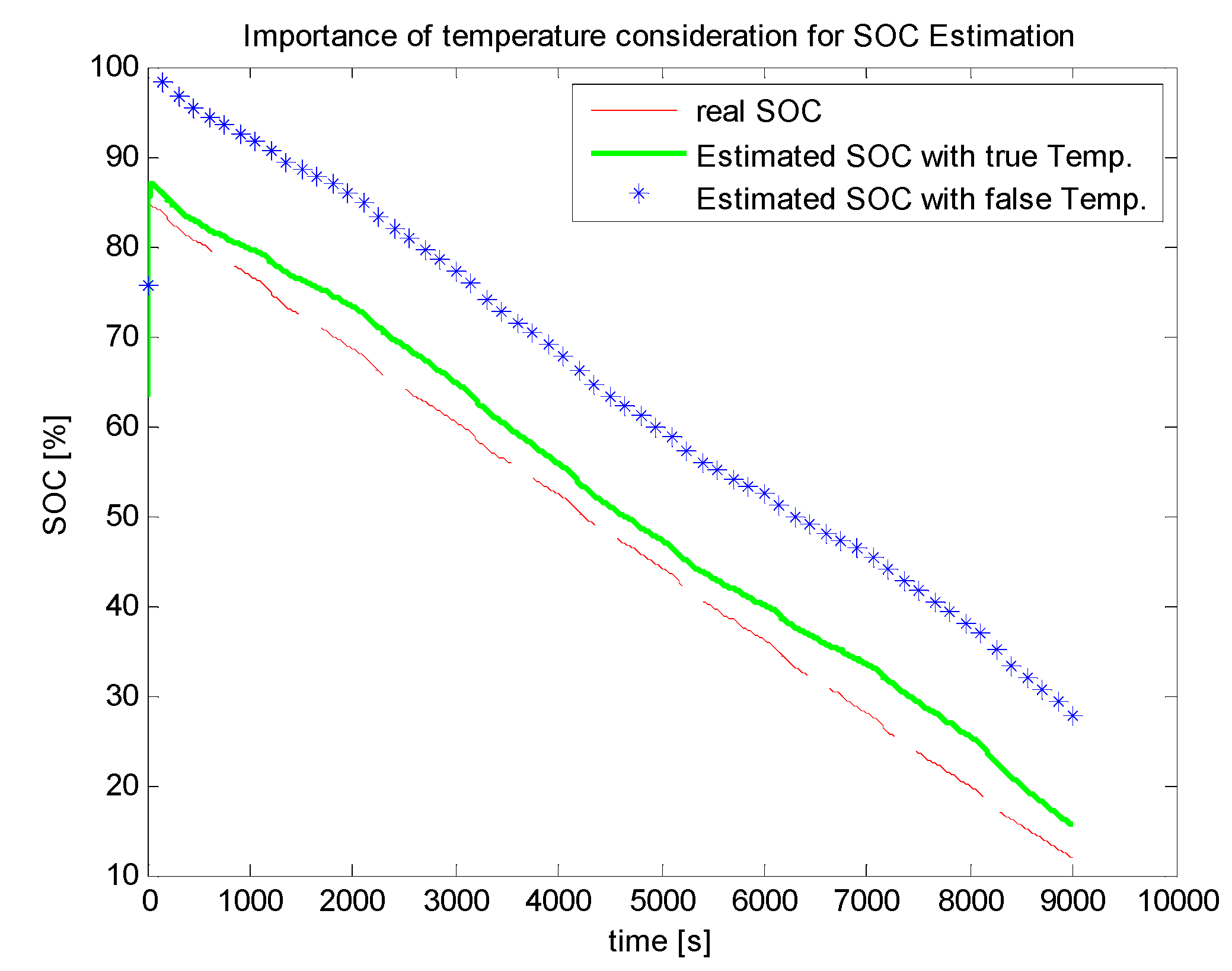
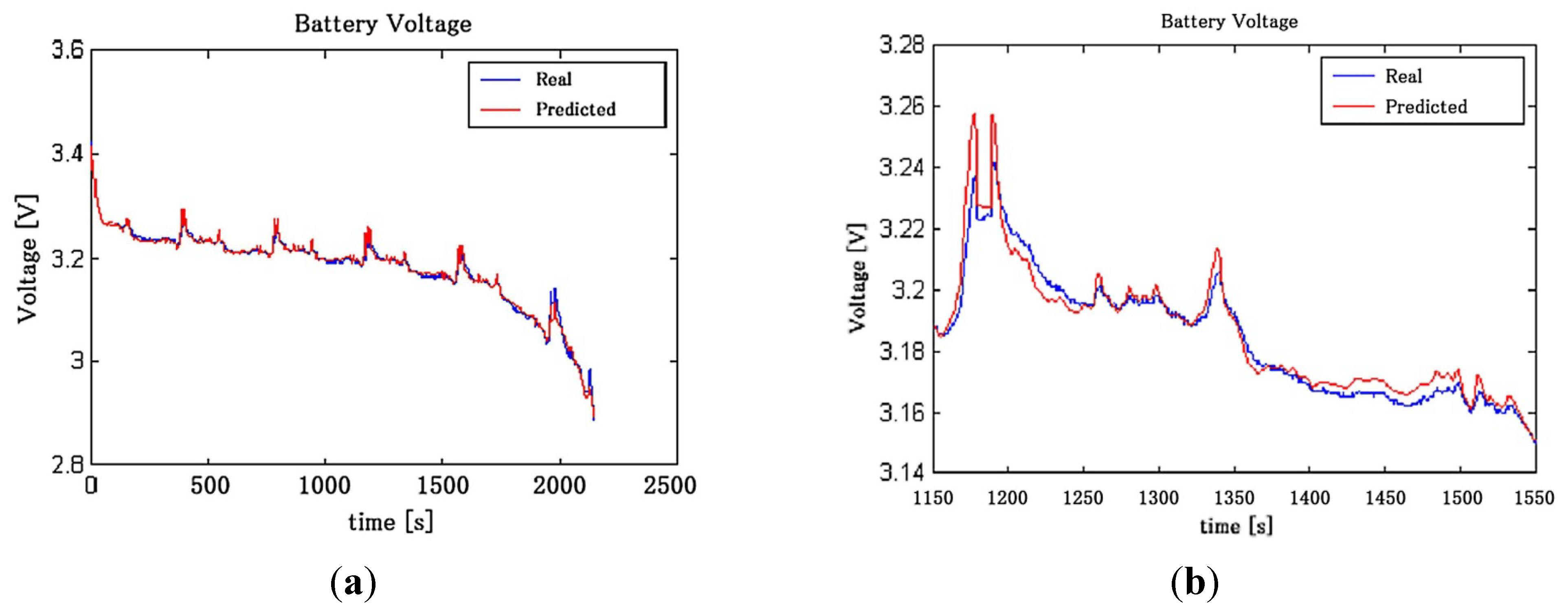
5.2. Algorithm and Model Verification



5.3. Battery Chemistry Adaptability

6. Conclusions
Acknowledgments
Conflict of Interest
References
- Larico, H.R.E.; Barbi, I. Three-phase push–pull DC–DC converter: Analysis, design, and experimentation. IEEE Trans. Ind. Electron. 2012, 12, 4629–4636. [Google Scholar] [CrossRef]
- Kutluay, K.; Çadırcı, Y.; Özkazanç, Y.S. A new online state-of charge estimation and monitoring system for sealed lead-acid batteries in telecommunication power supplies. IEEE Trans. Ind. Electron. 2005, 5, 1315–1327. [Google Scholar] [CrossRef]
- Hu, Y.; Yurkovich, S. Battery State of Charge Estimation in Automotive Applications Using LPV Techniques. In Proceedings of 2010 American Control Conference, Baltimore, MD, USA, 30 June–2 July 2010.
- Amjadi, Z.; Williamson, S.S. Power-electronics-based solutions for plug-in hybrid electric vehicle energy storage and management systems. IEEE Trans. Ind. Electron. 2010, 2, 608–616. [Google Scholar] [CrossRef]
- Ma, C.; Yang, Y. A battery-aware scheme for routing in wireless ad hoc networks. IEEE Trans. Ind. Electron. 2011, 8, 3919–3932. [Google Scholar]
- Shahriairi, M.; Farrokhi, M. On-line state of health estimation of VRLA batteries using state of charge. IEEE Trans. Ind. Electron. 2013, 1, 191–202. [Google Scholar] [CrossRef]
- Yuan, S.; Wu, H.; Yin, C. State of charge estimation using the extended Kalman filter for battery management systems based on the ARX battery model. Energies 2013, 6, 444–470. [Google Scholar] [CrossRef]
- Urbain, M.; Raël, S.; Davat, B.; Desprez, P. State Estimation of a Lithium-Ion Battery through Kalman Filter. In Proceedings of IEEE Power Electronics Specialists Conference, Orlando, FL, USA, 17–21 June 2007.
- Plette, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs: Part 2. J. Power Sources 2004, 2, 262–276. [Google Scholar] [CrossRef]
- Plette, G.L. Sigma-point Kalman filtering for battery management systems of LiPB-based HEV battery packs. Part 2: Simultaneous state and parameter estimation. J. Power Sources 2006, 2, 1369–1384. [Google Scholar] [CrossRef]
- Zhang, F.; Liu, G.; Fang, L.; Wang, H. Estimation of battery state of charge with H-infinity observer: Applied to a robot for inspecting power transmission lines. IEEE Trans. Ind. Electron. 2012, 2, 1086–1095. [Google Scholar] [CrossRef]
- Lee, Y.-S.; Wang, W.-Y.; Kuo, T.-Y. Soft computing for battery state-of-charge (BSOC) estimation in battery string systems. IEEE Trans. Ind. Electron. 2008, 1, 229–239. [Google Scholar] [CrossRef]
- Li, S.G.; Sharkh, S.M.; Walsh, F.C.; Zhang, C.N. Energy and battery management of a plug-in series hybrid electric vehicle using fuzzy logic. IEEE Trans. Veh. Technol. 2011, 8, 3571–3585. [Google Scholar] [CrossRef]
- Knauff, M.; Dafis, C.; Niebur, D. A New Battery Model for Use with an Extended Kalman Filter State of Charge Estimator. In Proceedings of 2010 American Control Conference, Baltimore, MD, USA, 30 June–2 July 2010.
- Smith, K.A.; Rahn, C.D.; Wang, C.Y. Control oriented 1D electrochemical model of Lithium-ion battery. Energy Convers. Manag. 2007, 9, 2565–2578. [Google Scholar] [CrossRef]
- Bhangu, B.S.; Bentley, P.; Stone, D.A.; Bingham, C.M. Nonlinear observers for predicting state-of-charge and state-of-health of lead-acid batteries for hybrid-electric vehicles. IEEE Trans. Veh. Technol. 2005, 3, 783–794. [Google Scholar] [CrossRef]
- Coleman, M.; Lee, C.K.; Zhu, C.; Hurley, W.G. State-of-charge determination from EMF voltage estimation: Using impedance, terminal voltage, and current for lead-acid and lithium-ion batteries. IEEE Trans. Ind. Electron. 2007, 5, 2550–2557. [Google Scholar] [CrossRef]
- Sitterly, M.; Wang, L.Y.; Yin, G.; Wang, C. Enhanced identification of battery models for real-time battery management. IEEE Trans. Sustain. Energy 2011, 3, 300–308. [Google Scholar] [CrossRef]
- Kim, T.; Qiao, W. A hybrid battery model capable of capturing dynamic circuit characteristics and nonlinear capacity effects. IEEE Trans. Energy Conv. 2011, 4, 1172–1180. [Google Scholar] [CrossRef]
- Chen, L.-R.; Liu, C.-S.; Chen, J.-J. Improving phase-locked battery charger speed by using resistance-compensated technique. IEEE Trans. Ind. Electron. 2009, 4, 1205–1211. [Google Scholar] [CrossRef]
- Agarwal, V.; Uthaichana, K.; DeCarlo, R.A.; Tsoukalas, L.H. Development and validation of a battery model useful for discharging and charging power control and lifetime estimation. IEEE Trans. Energy Conv. 2010, 3, 821–835. [Google Scholar] [CrossRef]
- Carter, R.; Cruden, A.; Hall, P.J.; Zaher, A.S. An improved lead-acid battery pack model for use in power simulations of electric vehicles. IEEE Trans. Energy Conv. 2012, 1, 21–28. [Google Scholar] [CrossRef]
- Klein, R.; Chaturvedi, N.A.; Christensen, J.; Ahmed, J.; Findeisen, R.; Kojic, A. State Estimation of a Reduced Electrochemical Model of a Lithium-Ion Battery. In Proceedings of 2010 American Control Conference, Baltimore, MD, USA, 30 June–2 July 2010.
- Liu, L.; Wang, L.Y.; Chen, Z.; Wang, C.; Lin, F.; Wang, H. Integrated system identification and state-of-charge estimation of battery systems. IEEE Trans. Energy Conv. 2013, 1, 12–23. [Google Scholar] [CrossRef]
- Xing, Y.; Ma, E.W.M.; Tsui, K.L.; Pecht, M. Battery management systems in electric and hybrid vehicles. Energies 2011, 4, 1840–1857. [Google Scholar] [CrossRef]
- He, W.; Williard, N.; Osterman, M.; Pecht, M. Prognostics of lithium-ion batteries based on Dempster–Shafer theory and the Bayesian Monte Carlo method. J. Power Sources 2011, 196, 10314–10321. [Google Scholar] [CrossRef]
- He, W.; Williard, N.; Chen, C.; Pecht, M. State of charge estimation for electric vehicle batteries using unscented kalman filtering. Microelectron. Reliab. 2013, 53, 840–847. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K.; Durrant, W.H.F. A New Approach for Filtering Nonlinear Systems. In Proceedings of the American Control Conference, Seattle, WA, USA, 21–23 June 1995.
- Van der Merwe, R. Sigma-Point Kalman Filters for Probabilistic Inference in Dynamic State-Space Models. Ph.D. Thesis, Oregon Health & Science University, Portland, OR, USA, 2004. [Google Scholar]
- Turner, R.; Rasmussen, C.E. Model Based Learning of Sigma Points in Unscented Kalman Filtering. In Proceedings of Machine Learning for Signal Processing, Kittilä, Finland, 29 August–1 September 2010.
- He, Z.; Gao, M.; Xu, J.; Liu, Y. Battery Model Parameters Estimation with the Sigma Point Kalman Filter. In Proceedings of 2009 International Conference on Artificial Intelligence and Computational Intelligence, Shanghai, China, 7–9 November 2009.
- Haykin, S.O. Adaptive Filter Theory, 4th ed.; Prentice Hall: Englewood Cliffs, NJ, USA, 2001. [Google Scholar]
- He, Z.; Liu, Y.; Gao, M.; Wang, C. A Joint Model and SOC Estimation Method for Lithium Battery Based on the Sigma Point KF. In Proceedings of 2012 IEEE Transportation Electrification Conference and Expo, Dearborn, MI, USA, 18–20 June 2012.
- Dynamometer Driving Scheules Utilized at the National Vehicle and Fuel Emissions Laoratory. Available online: http://www.epa.gov/nvfel/testing/dynamometer.htm (accessed on 12 June 2012).
© 2013 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
He, Z.; Gao, M.; Wang, C.; Wang, L.; Liu, Y. Adaptive State of Charge Estimation for Li-Ion Batteries Based on an Unscented Kalman Filter with an Enhanced Battery Model. Energies 2013, 6, 4134-4151. https://doi.org/10.3390/en6084134
He Z, Gao M, Wang C, Wang L, Liu Y. Adaptive State of Charge Estimation for Li-Ion Batteries Based on an Unscented Kalman Filter with an Enhanced Battery Model. Energies. 2013; 6(8):4134-4151. https://doi.org/10.3390/en6084134
Chicago/Turabian StyleHe, Zhiwei, Mingyu Gao, Caisheng Wang, Leyi Wang, and Yuanyuan Liu. 2013. "Adaptive State of Charge Estimation for Li-Ion Batteries Based on an Unscented Kalman Filter with an Enhanced Battery Model" Energies 6, no. 8: 4134-4151. https://doi.org/10.3390/en6084134
APA StyleHe, Z., Gao, M., Wang, C., Wang, L., & Liu, Y. (2013). Adaptive State of Charge Estimation for Li-Ion Batteries Based on an Unscented Kalman Filter with an Enhanced Battery Model. Energies, 6(8), 4134-4151. https://doi.org/10.3390/en6084134