
Estimation of State of Charge for Two Types of Lithium-Ion Batteries by Nonlinear Predictive Filter for Electric Vehicles

Abstract
:1. Introduction
2. Battery Model
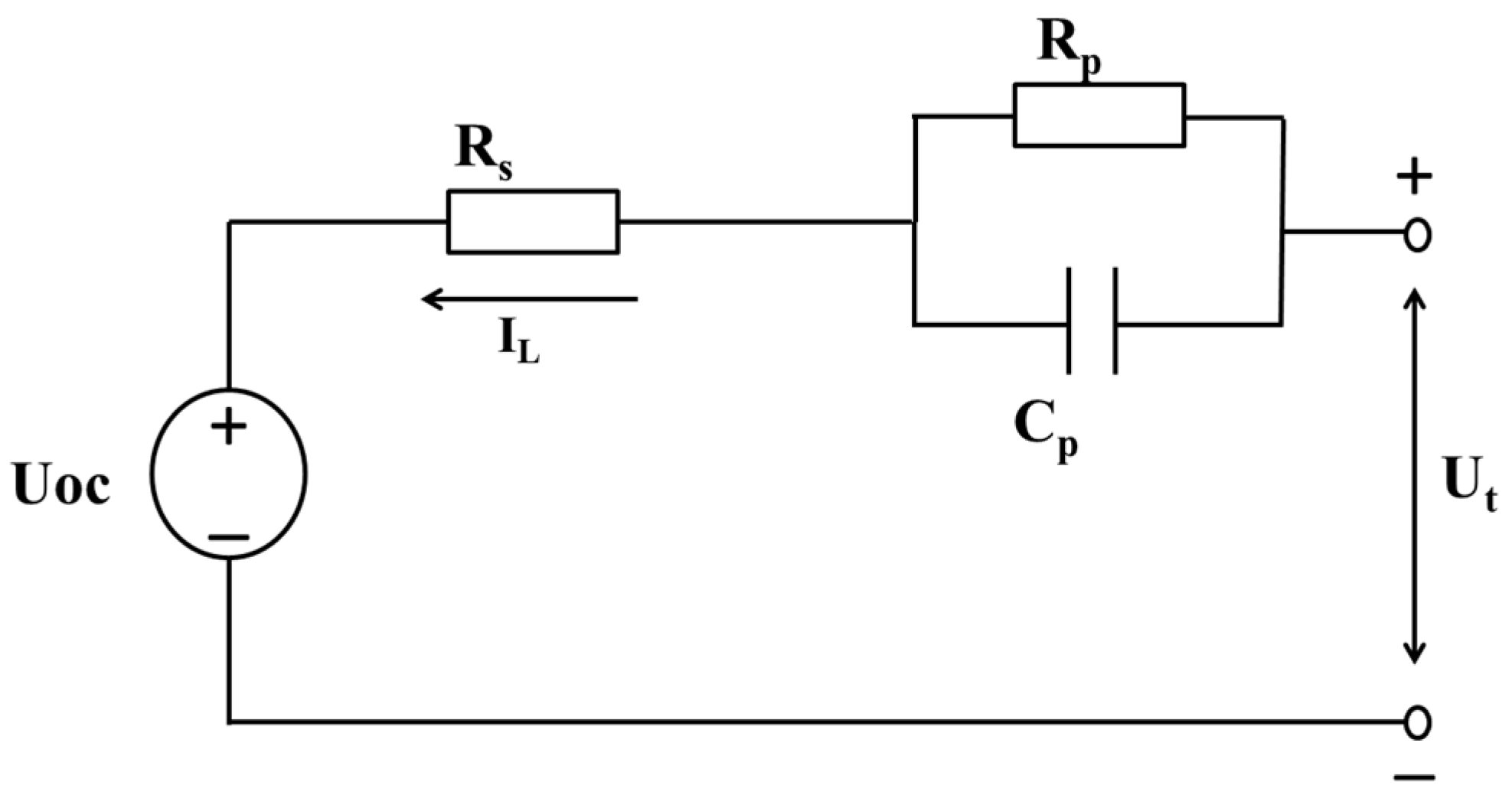
2.1. Model Structure

2.2. Model Parameter Identification
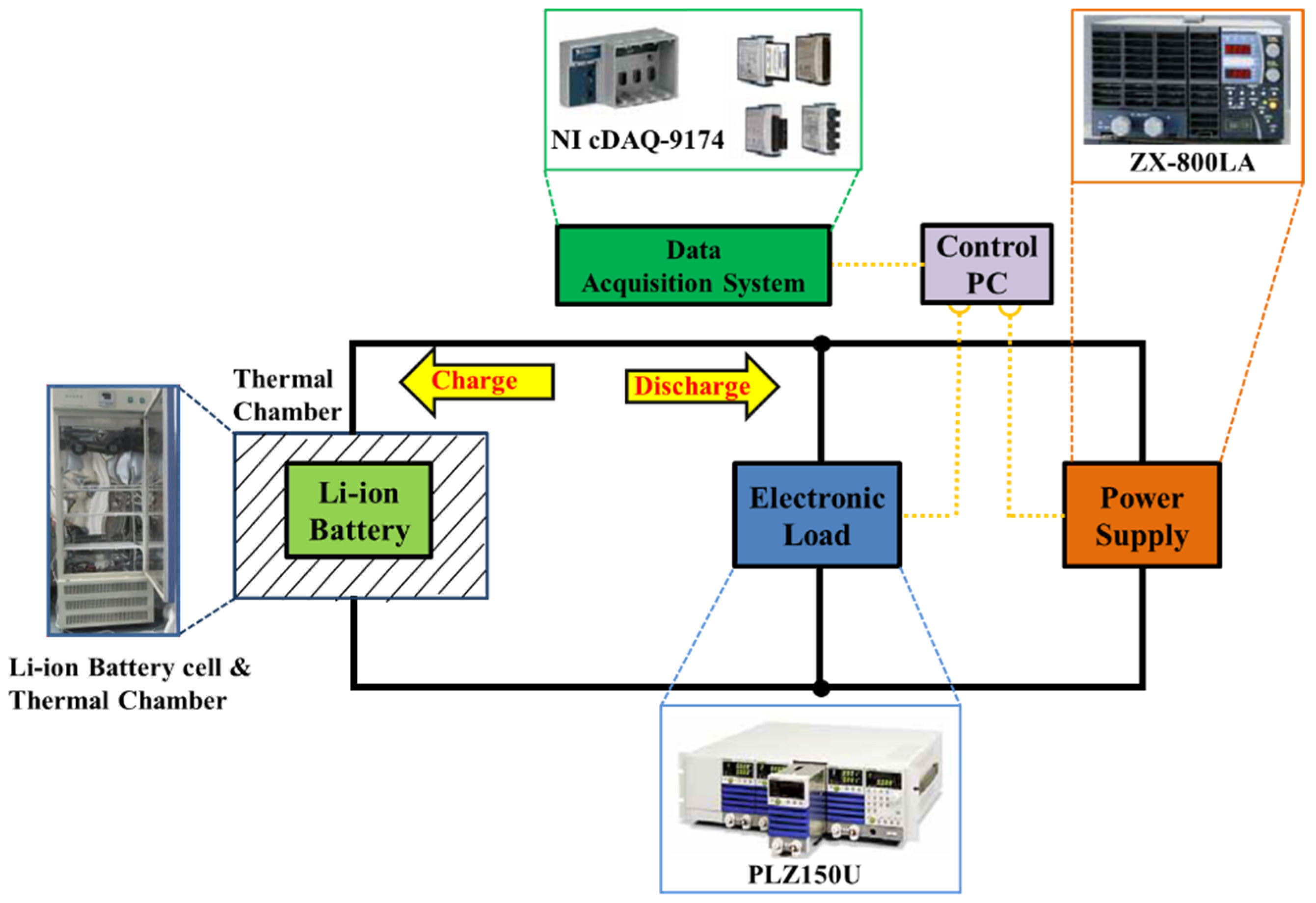
2.2.1. Experimental Setup


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Specification |
|---|---|
| Cell Dimensions (mm) | Ø 18 × 69 |
| Cell Weight (g) | 48.2 |
| Cell Capacity (nominal, Ah) | 2.6 |
| Cell Voltage (nominal, V) | 3.7 |
| Gravimetric Energy Density (nominal, Wh/kg) | 180 |
| Volumetric Energy Density (nominal, Wh/L) | 464 |
| Operating Temperature | −20 °C to 60 °C |
| Item | Specification |
|---|---|
| Cell Dimensions (mm) | Ø 32 × 113 |
| Cell Weight (g) | 205 |
| Cell Capacity (nominal, Ah) | 4.5 |
| Cell Voltage (nominal, V) | 3.3 |
| Gravimetric Energy Density (nominal, Wh/kg) | 71 |
| Volumetric Energy Density (nominal, Wh/L) | 161 |
| Operating Temperature | −30 °C to 55 °C |
2.2.2. Parameter Identification
- (1)
- Capacity test: The capacity test discharges the battery cell from the fully charged state (upper-limit voltage) to the fully discharged state (lower-limit voltage) with 0.5 C rate, and the cell capacity is referred as the total Ampere-hours drained out of the battery during the test. The cut-off voltages used during the test for LCO battery are Vmax = 4.2 V, Vmin = 2.8 V, and the cut-off voltages for LFP battery are Vmax = 3.6 V, Vmin = 2 V. The experimental results of the capacities for the tested LCO and LFP cells are 2.62 Ah and 4.29 Ah, respectively.
- (2)
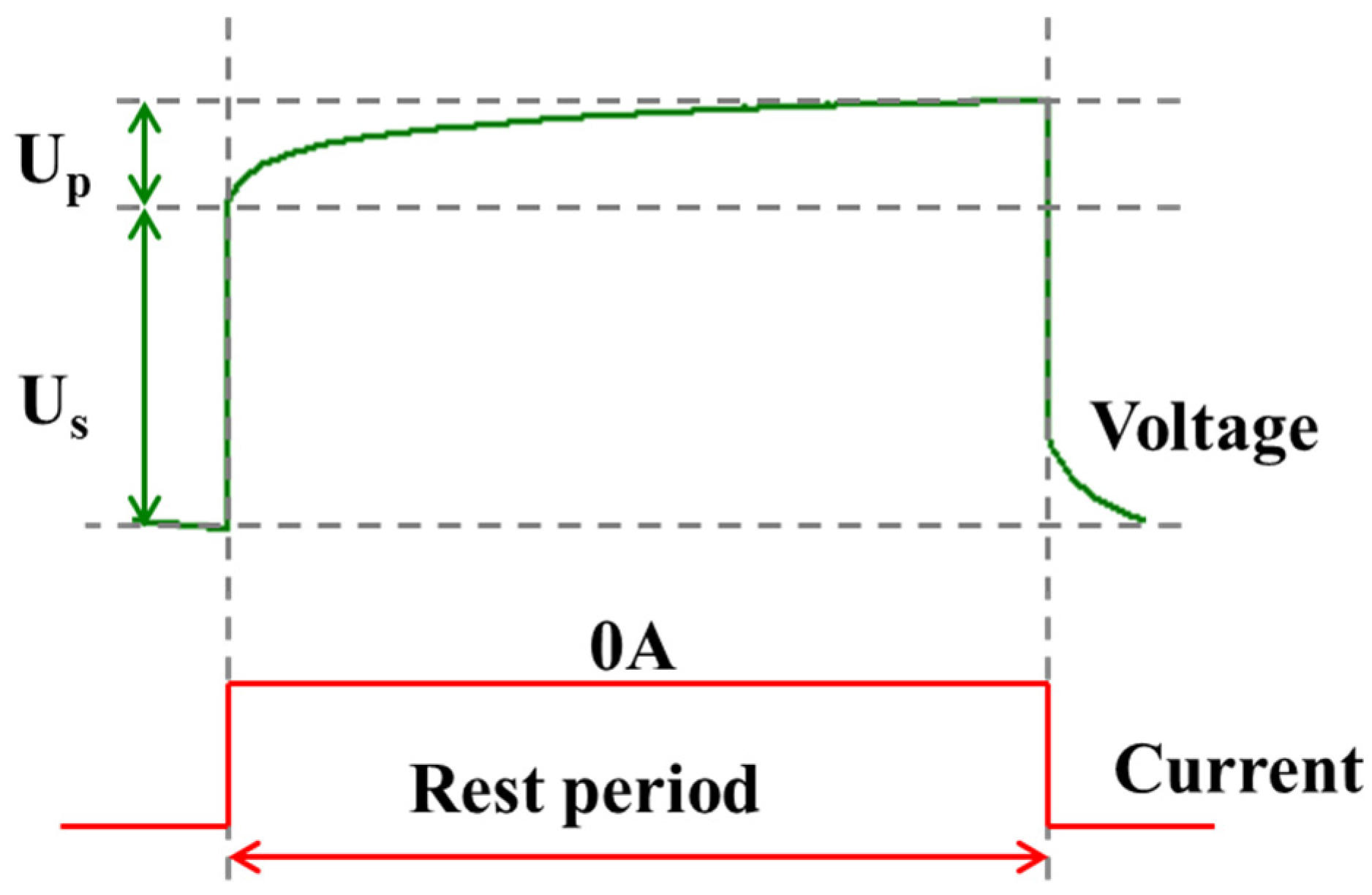
- Pulse current test: To identify the values of the electrical circuit elements in the first-order ECM, a pulse current test is conducted on the battery cells at 10% SOC intervals starting from 0.9 to 0.3. During the test, the environment temperature is controlled at 25 °C. The detailed test procedure can be found in [31]. In this study, the time period between two current pluses, when no current is applied, is used for parameters identification. The current and voltage profiles during this time period are shown in Figure 3. The ohmic resistance can be expressed as:


- (3)
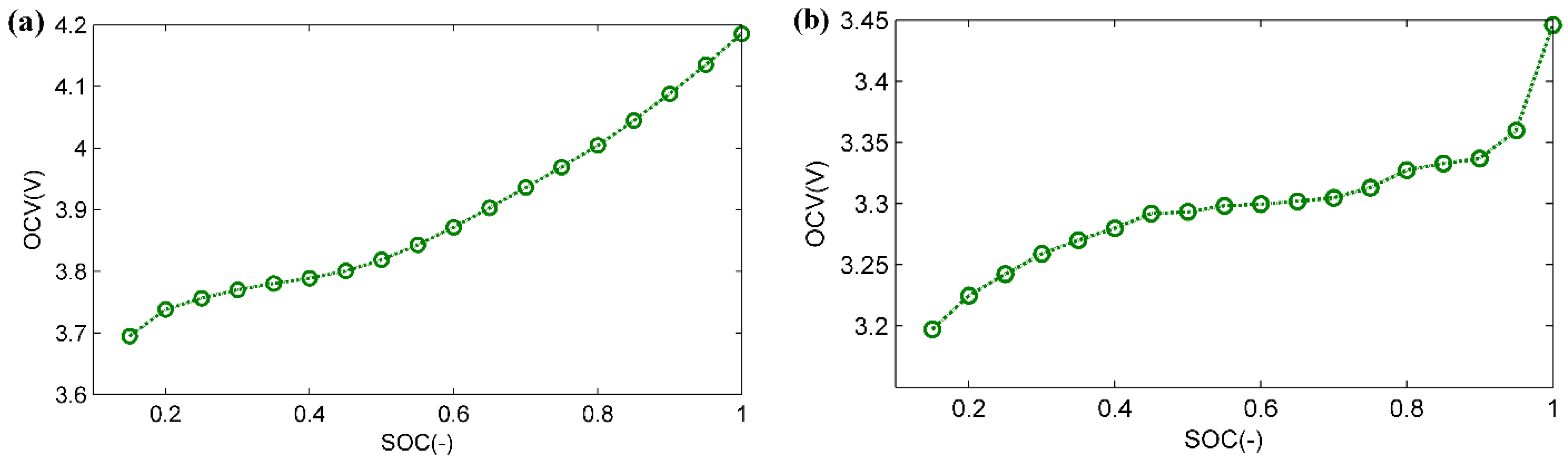
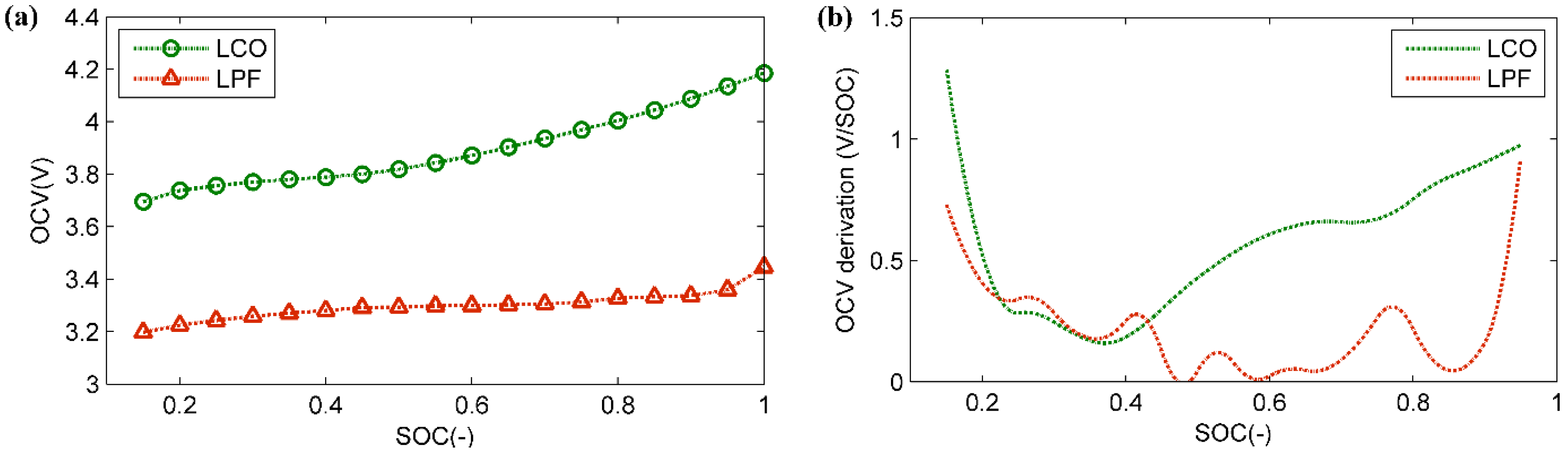
- Open circuit voltage test: To calibrate the nonlinear SOC-OCV relationship, an open circuit voltage test is conducted as follows. The battery cell is discharged using 0.5 C constant current at 5% SOC interval from 100% SOC to 15% SOC. After each discharge period, the battery cell is rested for 3 hours to reach the close-to-equilibrium open-circuit potential for each SOC point. A similar procedure is conducted to get the SOC-OCV curve under the battery charge condition. Since the possible hysteresis voltage is neglected in this paper, the SOC-OCV relationship for the battery model is defined as the average of the equilibrium potentials of charging and discharging. The experimental results of the SOC-OCV curves for LCO and LFP battery cells are shown in Figure 5.

| LCO Battery Cell | ||||
| Model parameters | ||||
| Values | 0.187 | 0.046 | 1969 | 2.62 |
| LFP battery cell | ||||
| Model parameters | ||||
| Values | 0.0048 | 0.0029 | 1186 | 4.29 |
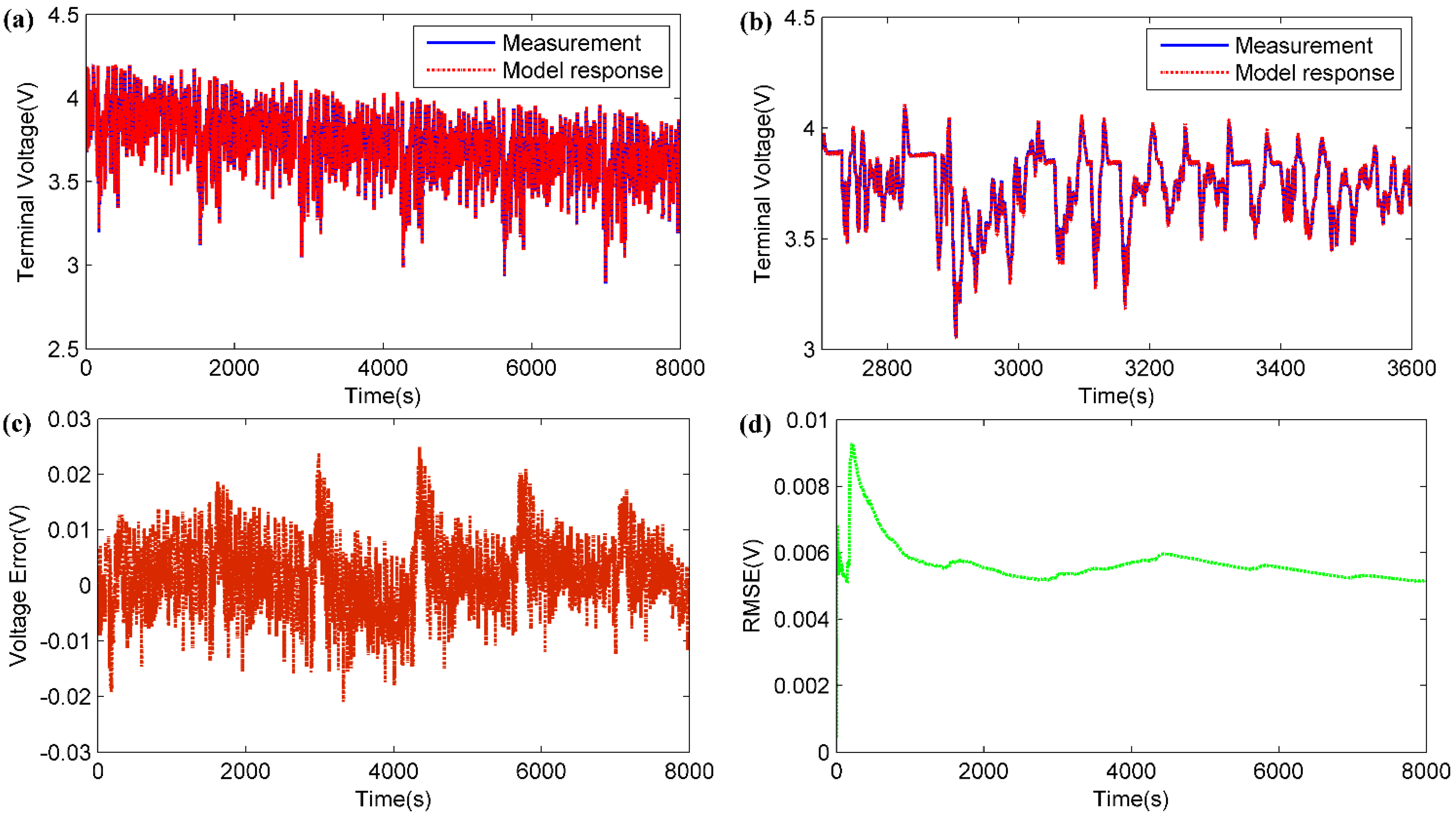
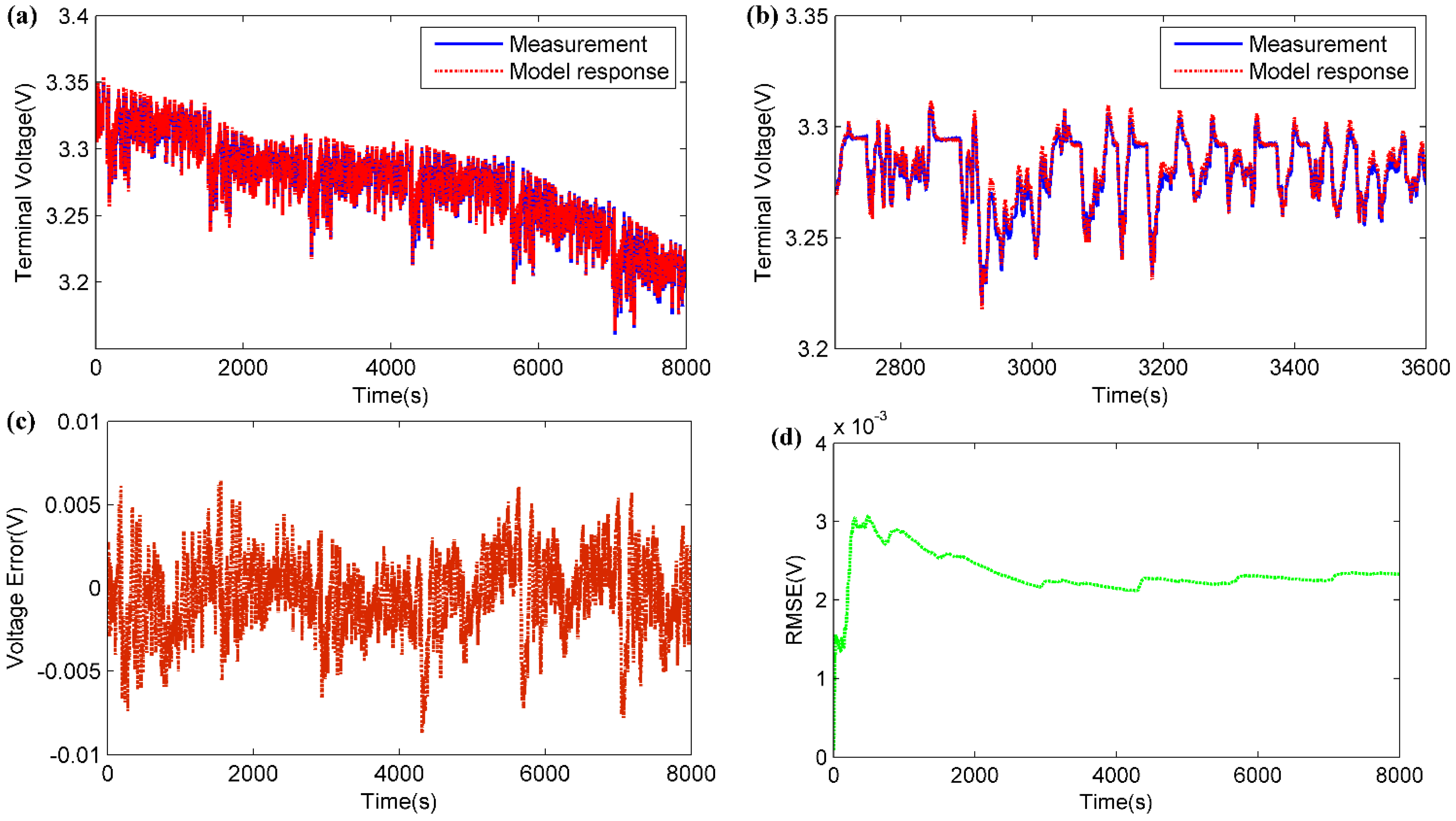
2.3. Model Validation


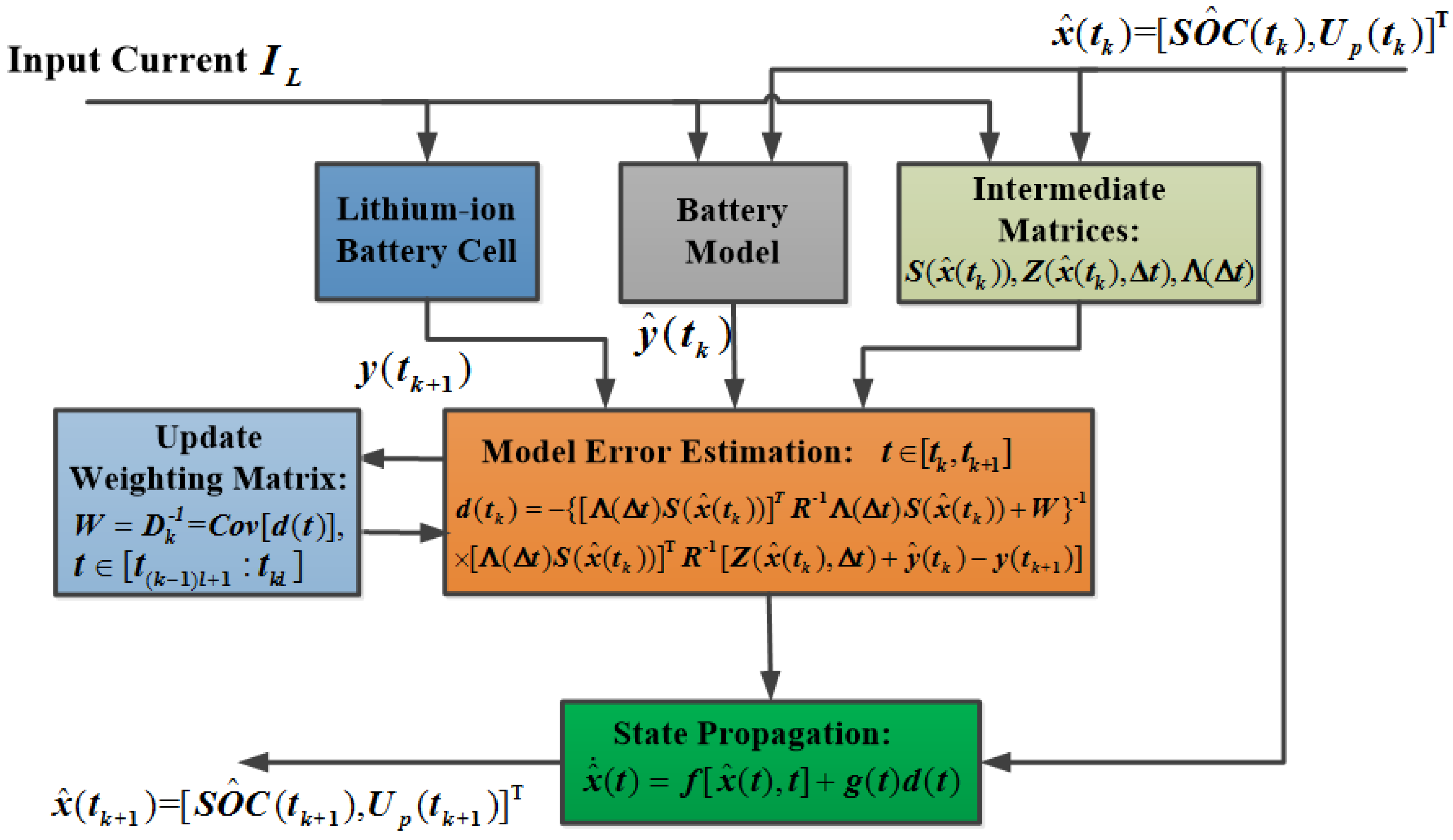
3. Nonlinear Predictive Filter for SOC Estimation
3.1. Nonlinear Predictive Filter
- Step.1:
- Initialization: , for the total time length L, the time interval for updating is defined as l = L/r, where r is the total iterations.
- Step.2:
- For : estimate the model error for , and obtain the sequence of model error .
- Step.3:
- For , update weighting matrix: , is the covariance for .
- Step.4:
- If , return to step.2.
- Step.1:
- Initialization: for :
- (a)
- Set initial values: , ;
- (b)
- Set weighting matrix update time interval: l = L/r.
- Step.2:
- For every time step doing the following:
- (a)
- Estimate system output: ;
- (b)
- Calculate the intermediate parameter matrices ;
- (c)
- Estimate model error: ;
- (d)
- Update state estimation from to using discretized state equation: .
- Step.3:
- For
- (a)
- Calculate covariance for :
- (b)
- Update weighting matrix:
3.2. NPF Based SOC Estimation

4. Results and Discussion
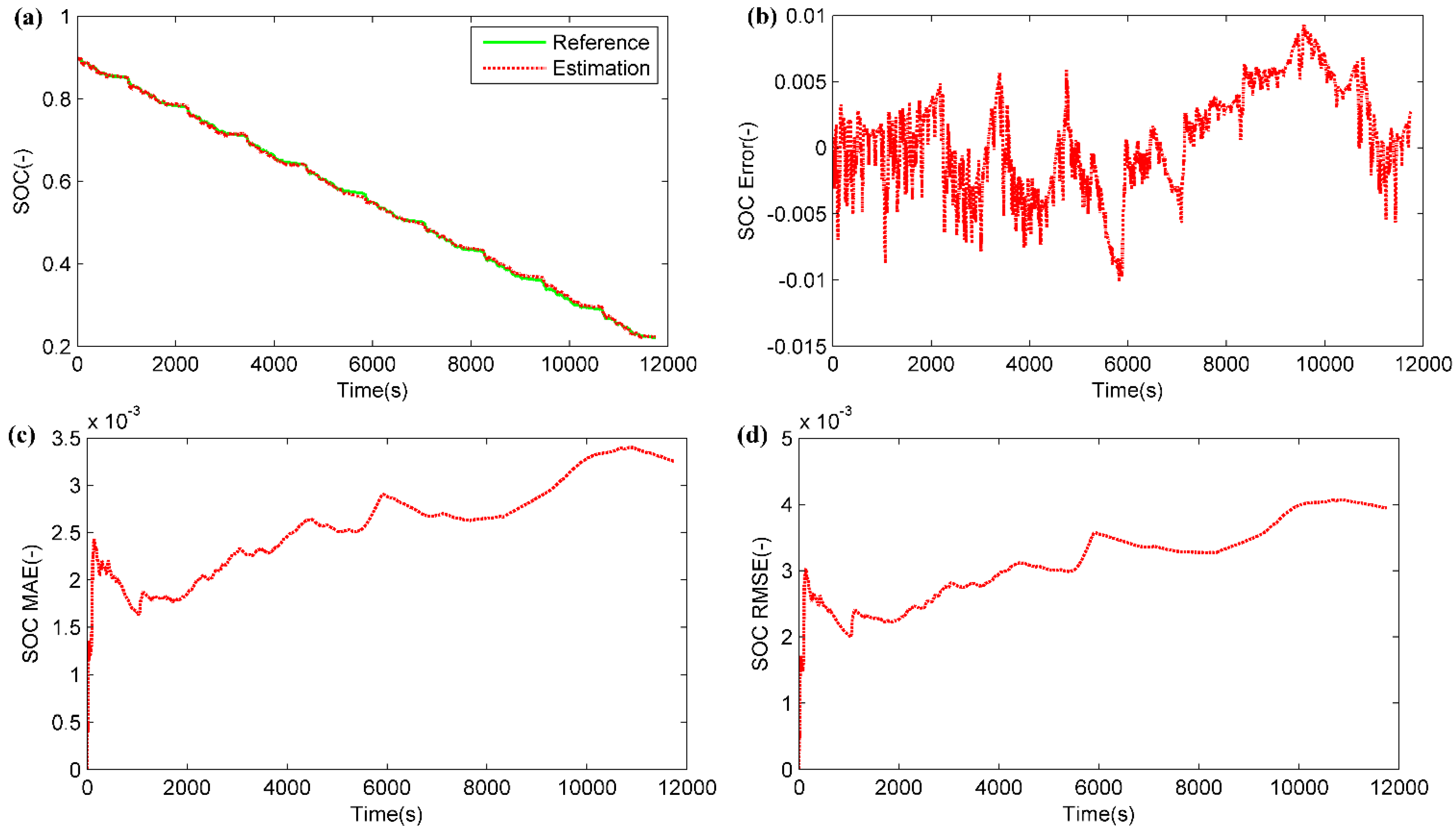
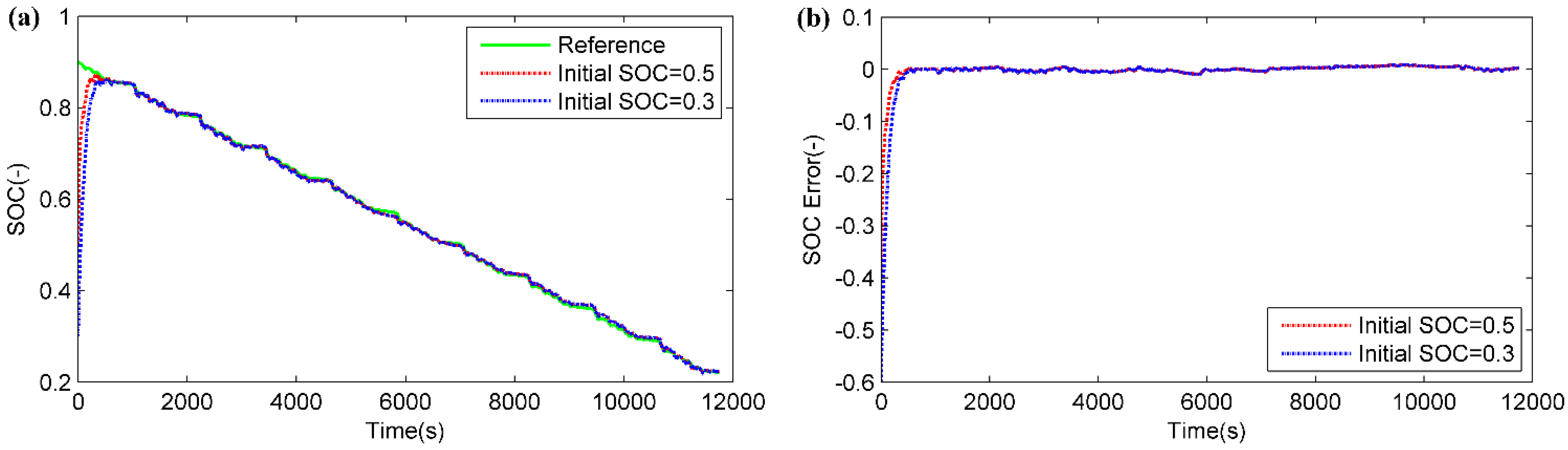
4.1. Part A: Evaluate the SOC Estimation of LCO Battery Cell


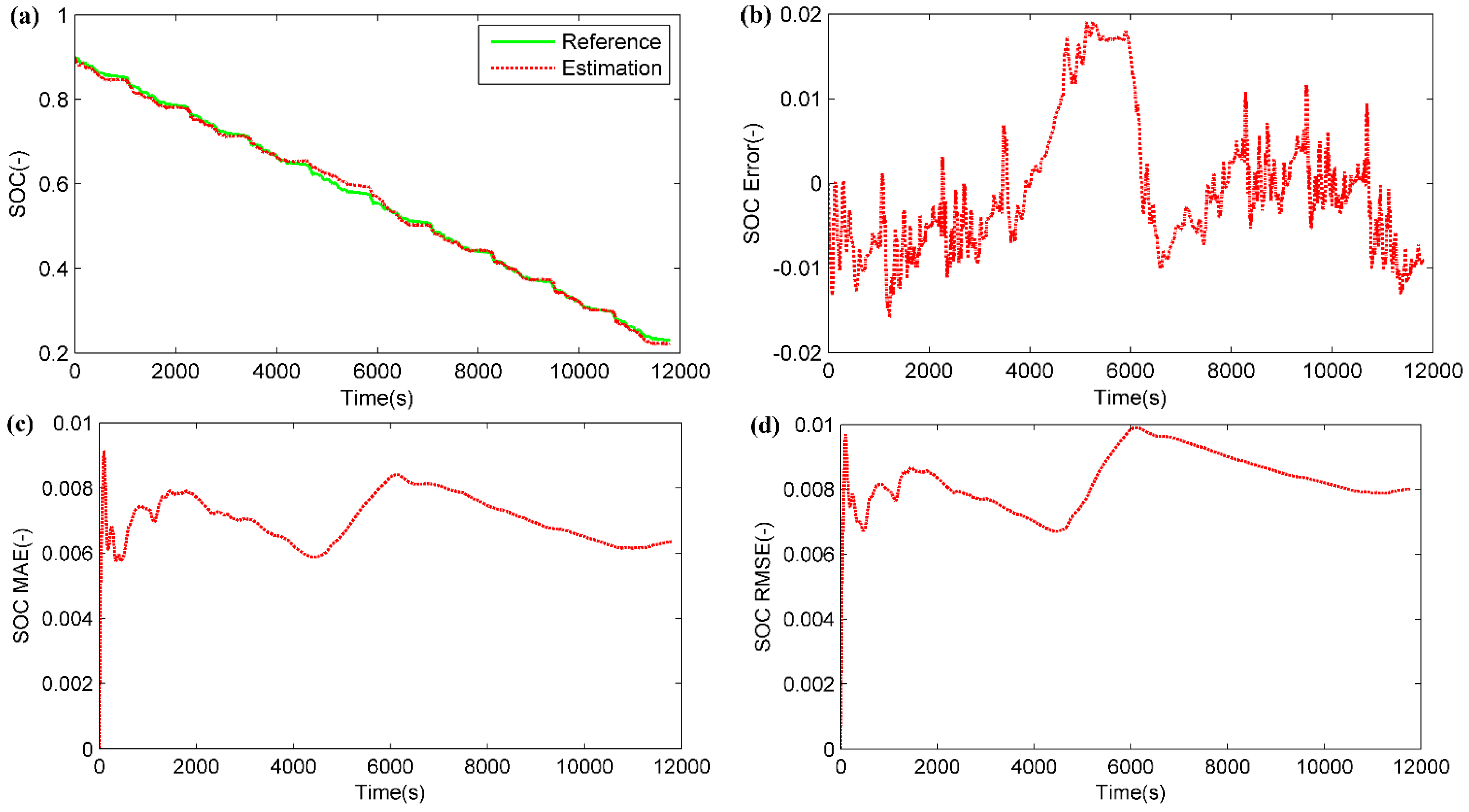
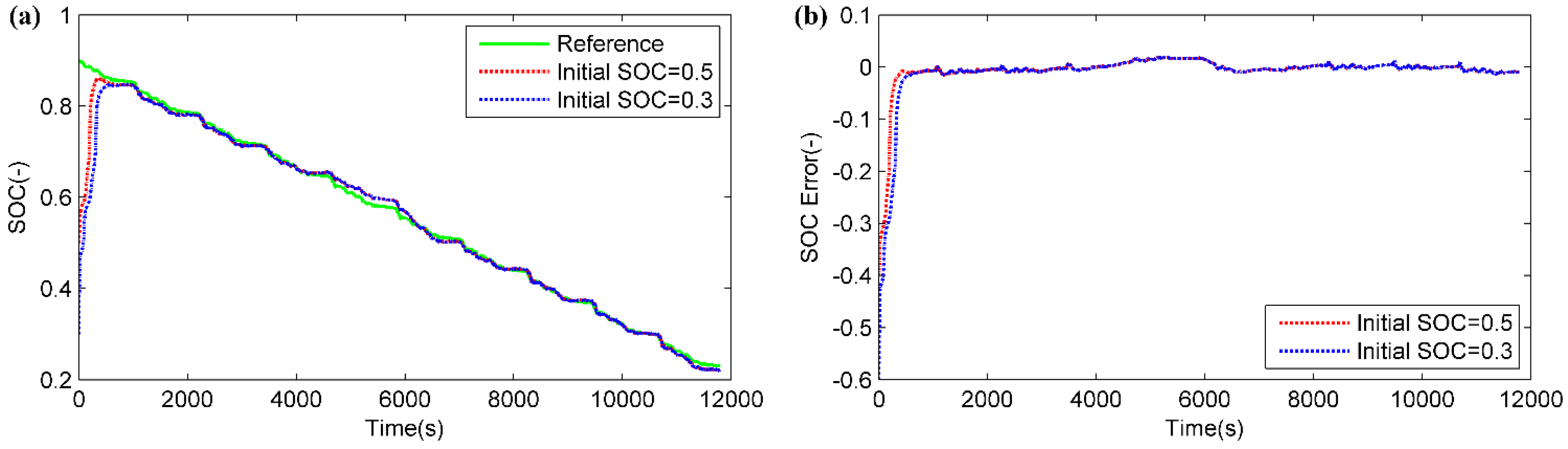
4.2. Part B: Evaluate the SOC Estimation of LFP Battery Cell



| Estimation accuracy | Maximum error | MAE | RMSE |
| LCO battery cell | 1.01% | 0.33% | 0.39% |
| LFP battery cell | 1.92% | 0.64% | 0.81% |
| Difference | 0.91% | 0.31% | 0.42% |
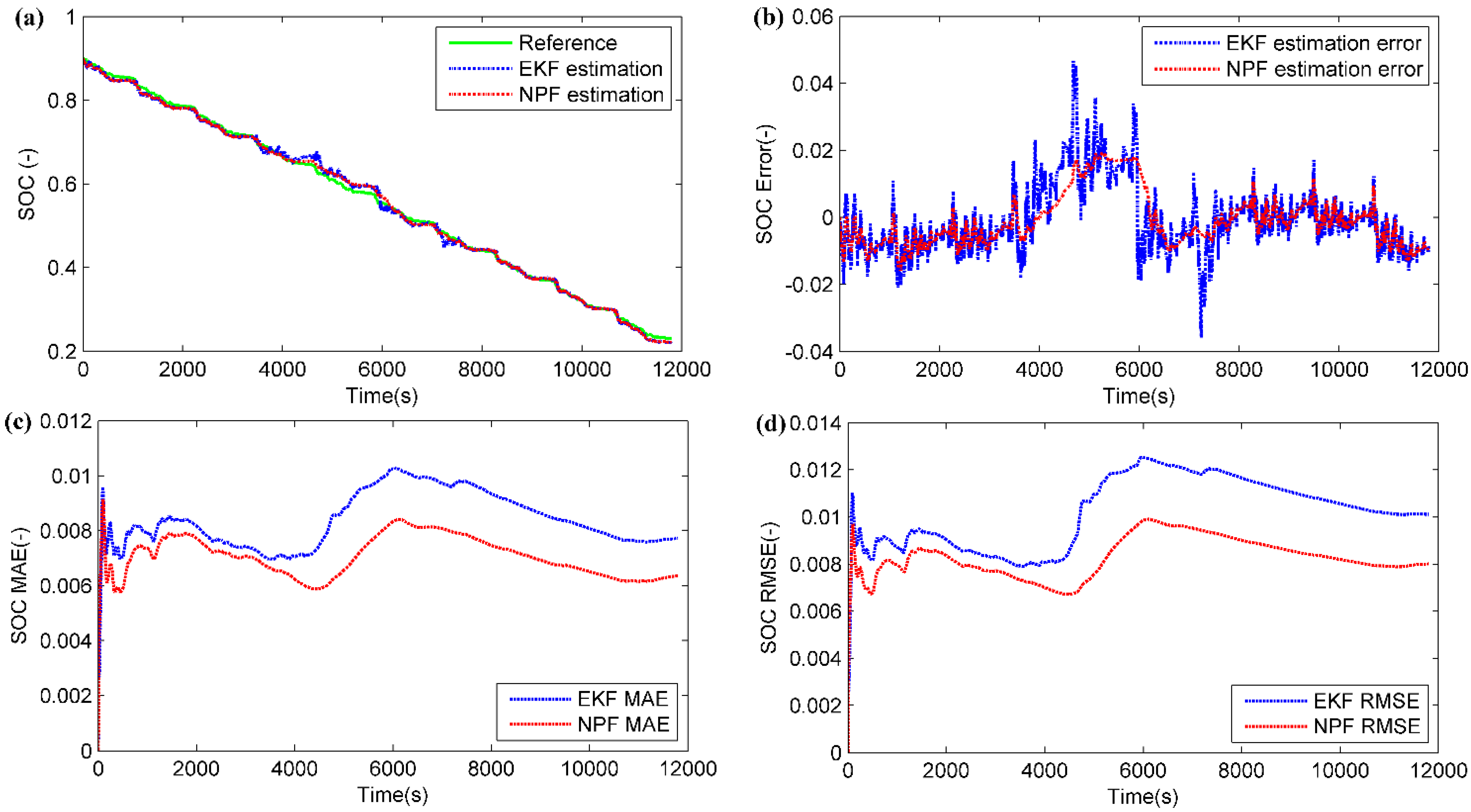
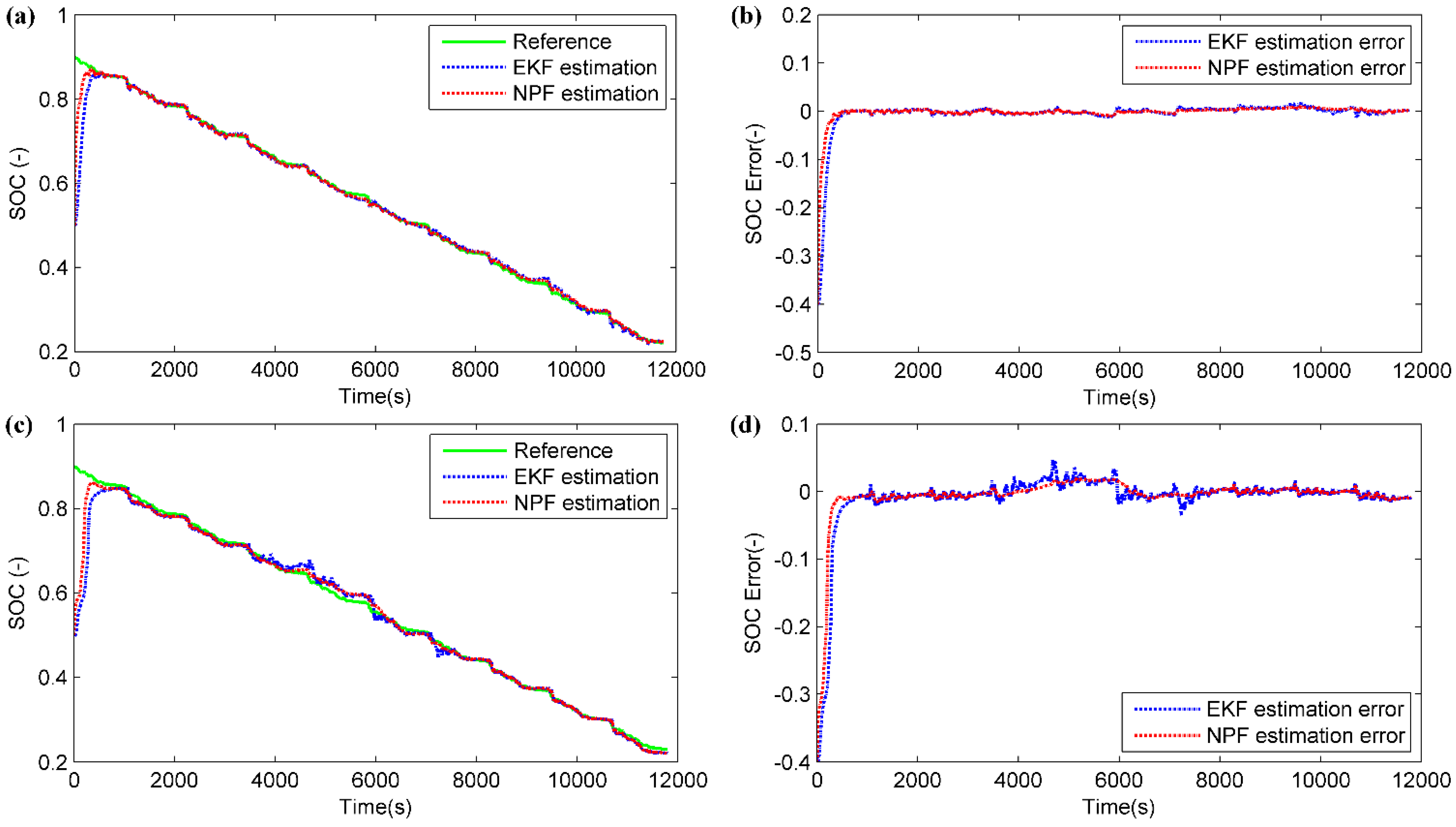
| Convergence rate | Convergence time (Initial SOC = 0.5) | Convergence time (Initial SOC = 0.3) | |
| LCO battery cell | 302 s | 427 s | |
| LFP battery cell | 392 s | 556 s | |
| Difference | 29.8% | 30.2% | |
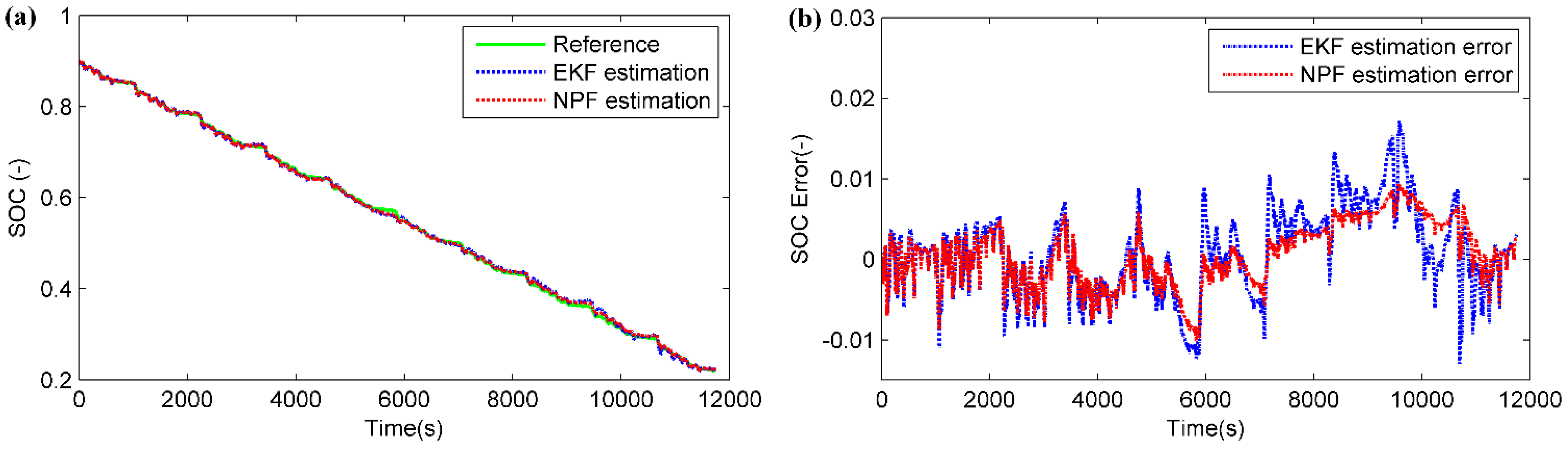
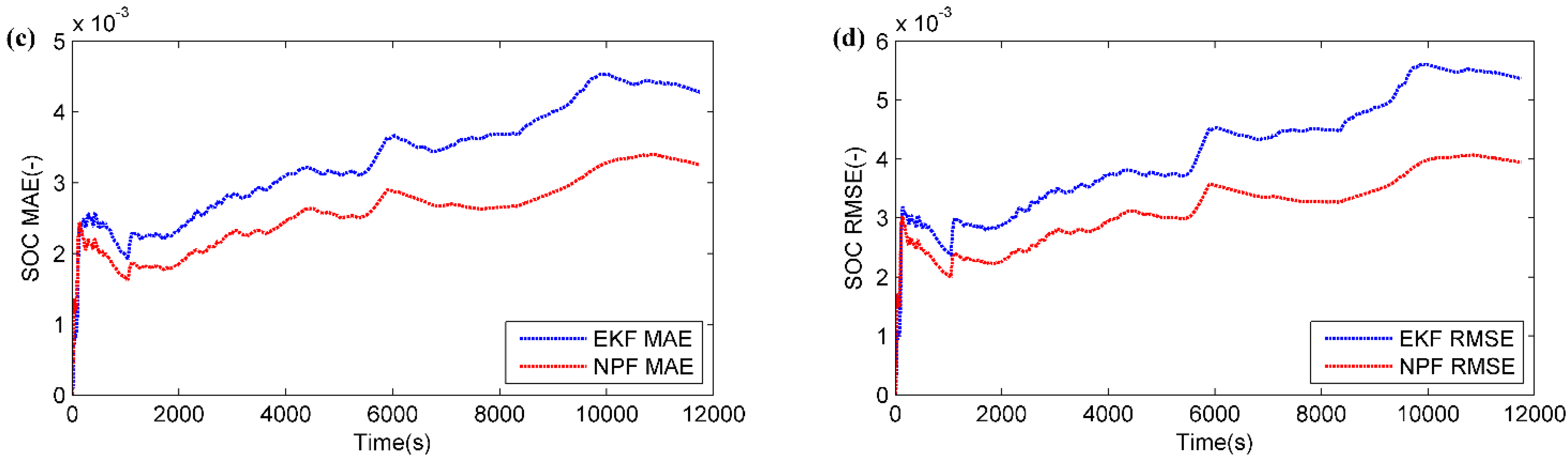
4.3. Part C: Comparison with Extended Kalman Filter
- Step.1:
- Initialization: For k = 0, set: ,
- Step.2:
- For k = 1,2, . . . n, do the following:
- (a)
- State estimation time update:
- (b)
- Error covariance time update:
- (c)
- Calculate the Kalman gain:
- (d)
- State estimation measurement update:
- (e)
- Error covariance measurement update:



| Estimation Accuracy | Maximum Error | MAE | RMSE |
|---|---|---|---|
| LCO battery cell | |||
| EKF | 1.64% | 0.43% | 0.54% |
| NPF | 1.01% | 0.33% | 0.39% |
| Improvement | 38.4% | 17.9% | 27.8% |
| LFP battery cell | |||
| EKF | 4.66% | 0.78% | 1.01% |
| NPF | 1.92% | 0.64% | 0.81% |
| Improvement | 58.8% | 17.9% | 20.8% |

| Convergence Rate | Time |
|---|---|
| LCO battery cell | |
| EKF | 439 s |
| NPF | 302 s |
| Improvement | 31.2% |
| LFP battery cell | |
| EKF | 586 s |
| NPF | 392 s |
| Improvement | 33.1% |
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Xi, J.; Li, M.; Xu, M. Optimal energy management strategy for battery powered electric vehicles. Appl. Energy 2014, 134, 332–341. [Google Scholar] [CrossRef]
- Wang, B.; Xu, M.; Yang, L. Study on the economic and environmental benefits of different EV powertrain topologies. Energy Conver. Manag. 2014, 86, 916–926. [Google Scholar] [CrossRef]
- Lukic, S.M.; Cao, J.; Bansal, R.C.; Rodriguez, F.; Emadi, A. Energy storage systems for automotive applications. IEEE Trans. Ind. Electron. 2008, 55, 2258–2267. [Google Scholar] [CrossRef]
- Hammond, G.P.; Hazeldine, T. Indicative energy technology assessment of advanced rechargeable batteries. Appl. Energy 2014, 138, 559–571. [Google Scholar] [CrossRef] [Green Version]
- Garche, J.; Jossen, A.; Döring, H. The influence of different operating conditions, especially over-discharge, on the lifetime and performance of lead/acid batteries for photovoltaic systems. J. Power Sour. 1997, 67, 201–212. [Google Scholar] [CrossRef]
- Alzieu, J.; Smimite, H.; Glaize, C. Improvement of intelligent battery controller: State-of-Charge indicator and associated functions. J. Power Sour. 1997, 67, 157–161. [Google Scholar] [CrossRef]
- Xing, Y.; He, W.; Pecht, M.; Tsui, K.L. State of charge estimation of lithium-ion batteries using the open-circuit voltage at various ambient temperatures. Appl. Energy 2014, 113, 106–115. [Google Scholar] [CrossRef]
- Eddahech, A.; Briat, O.; Vinassa, J.M. Adaptive voltage estimation for EV Li-ion cell based on artificial neural networks state-of-charge meter. In Proceedings of the 2012 IEEE International Symposium on Industrial Electronics (ISIE), Hangzhou, China, 28–31 May 2012; pp. 1318–1324.
- Salkind, A.J.; Fennie, C.; Singh, P.; Atwater, T.; Reisner, D.E. Determination of state-of-charge and state-of-health of batteries by fuzzy logic methodology. J. Power Sour. 1999, 80, 293–300. [Google Scholar] [CrossRef]
- Anton, J.C.A.; Nieto, P.J.G.; Viejo, C.B.; Vilan, J.A. Support vector machines used to estimate the battery state of charge. IEEE Trans. Power Electron. 2013, 28, 5919–5926. [Google Scholar] [CrossRef]
- Tsang, K.M.; Sun, L.; Chan, W.L. Identification and modelling of Lithium ion battery. Energy Convers. Manag. 2010, 51, 2857–2862. [Google Scholar] [CrossRef]
- He, H.; Xiong, R.; Guo, H.; Li, S. Comparison study on the battery models used for the energy management of batteries in electric vehicles. Energy Convers. Manag. 2012, 64, 113–121. [Google Scholar] [CrossRef]
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs: Part 1. Background. J. Power Sour. 2004, 134, 252–261. [Google Scholar] [CrossRef]
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs: Part 2. Modeling and identification. J. Power Sour. 2004, 134, 262–276. [Google Scholar] [CrossRef]
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs: Part 3. State and parameter estimation. J. Power Sour. 2004, 134, 277–292. [Google Scholar] [CrossRef]
- Plett, G.L. Sigma-point Kalman filtering for battery management systems of LiPB-based HEV battery packs: Part 1: Introduction and state estimation. J. Power Sour. 2006, 161, 1356–1368. [Google Scholar] [CrossRef]
- Plett, G.L. Sigma-point Kalman filtering for battery management systems of LiPB-based HEV Battery packs: Part 2: Simultaneous state and parameter estimation. J. Power Sour. 2006, 161, 1369–1384. [Google Scholar] [CrossRef]
- He, Z.; Gao, M.; Wang, C.; Wang, L.; Liu, Y. Adaptive state of charge estimation for Li-ion batteries based on an unscented kalman filter with an enhanced battery model. Energies 2013, 6, 4134–4151. [Google Scholar] [CrossRef]
- Han, J.; Kim, D.; Sunwoo, M. State-of-charge estimation of lead-acid batteries using an adaptive extended Kalman filter. J. Power Sour. 2009, 188, 606–612. [Google Scholar] [CrossRef]
- Sun, F.; Hu, X.; Zou, Y.; Li, S. Adaptive unscented Kalman filtering for state of charge estimation of a lithium-ion battery for electric vehicles. Energy 2011, 36, 3531–3540. [Google Scholar] [CrossRef]
- Schwunk, S.; Armbruster, N.; Straub, S.; Kehl, J.; Vetter, M. Particle filter for state of charge and state of health estimation for lithium-iron phosphate batteries. J. Power Sour. 2013, 239, 705–710. [Google Scholar] [CrossRef]
- Charkhgard, M.; Farrokhi, M. State-of-charge estimation for lithium-ion batteries using neural networks and EKF. IEEE Trans. Ind. Electron. 2010, 57, 4178–4187. [Google Scholar] [CrossRef]
- Tian, Y.; Xia, B.; Wang, M.; Sun, W.; Xu, Z. Comparison Study on two model-based adaptive algorithms for SOC estimation of lithium-ion batteries in electric vehicles. Energies 2014, 7, 8446–8464. [Google Scholar] [CrossRef]
- He, H.; Qin, H.; Sun, X.; Shui, Y. Comparison study on the battery SoC estimation with EKF and UKF algorithms. Energies 2013, 6, 5088–5100. [Google Scholar] [CrossRef]
- Zou, Z.; Xu, J.; Mi, C.; Cao, B.; Chen, Z. Evaluation of model based state of charge estimation methods for lithium-ion batteries. Energies 2014, 7, 5065–5082. [Google Scholar] [CrossRef]
- Yuan, S.; Wu, H.; Yin, C. State of charge estimation using the extended kalman filter for battery management systems based on the arx battery model. Energies 2013, 6, 444–470. [Google Scholar] [CrossRef]
- Xia, B.; Chen, C.; Tian, Y.; Sun, W.; Xu, Z.; Zheng, W. A novel method for state of charge estimation of lithium-ion batteries using a nonlinear observer. J. Power Sour. 2014, 270, 359–366. [Google Scholar] [CrossRef]
- Crassidis, J.L.; Markley, F.L. Predictive filtering for attitude estimation without rate sensors. J. Guid. Control Dyn. 1997, 20, 522–527. [Google Scholar] [CrossRef]
- Hua, Y.; Cordoba-Arenas, A.; Warner, N.; Rizzoni, G. A multi time-scale state-of-charge and state-of-health estimation framework using nonlinear predictive filter for lithium-ion battery pack with passive balance control. J. Power Sour. 2015, 280, 293–312. [Google Scholar] [CrossRef]
- Hu, X.; Li, S.; Peng, H. A comparative study of equivalent circuit models for Li-ion batteries. J. Power Sour. 2012, 198, 359–367. [Google Scholar] [CrossRef]
- Abu-Sharkh, S.; Doerffel, D. Rapid test and non-linear model characterisation of solid-state lithium-ion batteries. J. Power Sour. 2004, 130, 266–274. [Google Scholar] [CrossRef]
- US Environmental Protection Agency. EPA urban dynamometer driving schedule (UDDS). Available online: http://www.epa.gov/oms/standards/light-duty/udds.htm (accessed on 3 April 2015).
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hua, Y.; Xu, M.; Li, M.; Ma, C.; Zhao, C. Estimation of State of Charge for Two Types of Lithium-Ion Batteries by Nonlinear Predictive Filter for Electric Vehicles. Energies 2015, 8, 3556-3577. https://doi.org/10.3390/en8053556
Hua Y, Xu M, Li M, Ma C, Zhao C. Estimation of State of Charge for Two Types of Lithium-Ion Batteries by Nonlinear Predictive Filter for Electric Vehicles. Energies. 2015; 8(5):3556-3577. https://doi.org/10.3390/en8053556
Chicago/Turabian StyleHua, Yin, Min Xu, Mian Li, Chengbin Ma, and Chen Zhao. 2015. "Estimation of State of Charge for Two Types of Lithium-Ion Batteries by Nonlinear Predictive Filter for Electric Vehicles" Energies 8, no. 5: 3556-3577. https://doi.org/10.3390/en8053556
APA StyleHua, Y., Xu, M., Li, M., Ma, C., & Zhao, C. (2015). Estimation of State of Charge for Two Types of Lithium-Ion Batteries by Nonlinear Predictive Filter for Electric Vehicles. Energies, 8(5), 3556-3577. https://doi.org/10.3390/en8053556