
Optimization of the Heating System Use in Aged Public Buildings via Model Predictive Control




Abstract
:1. Introduction
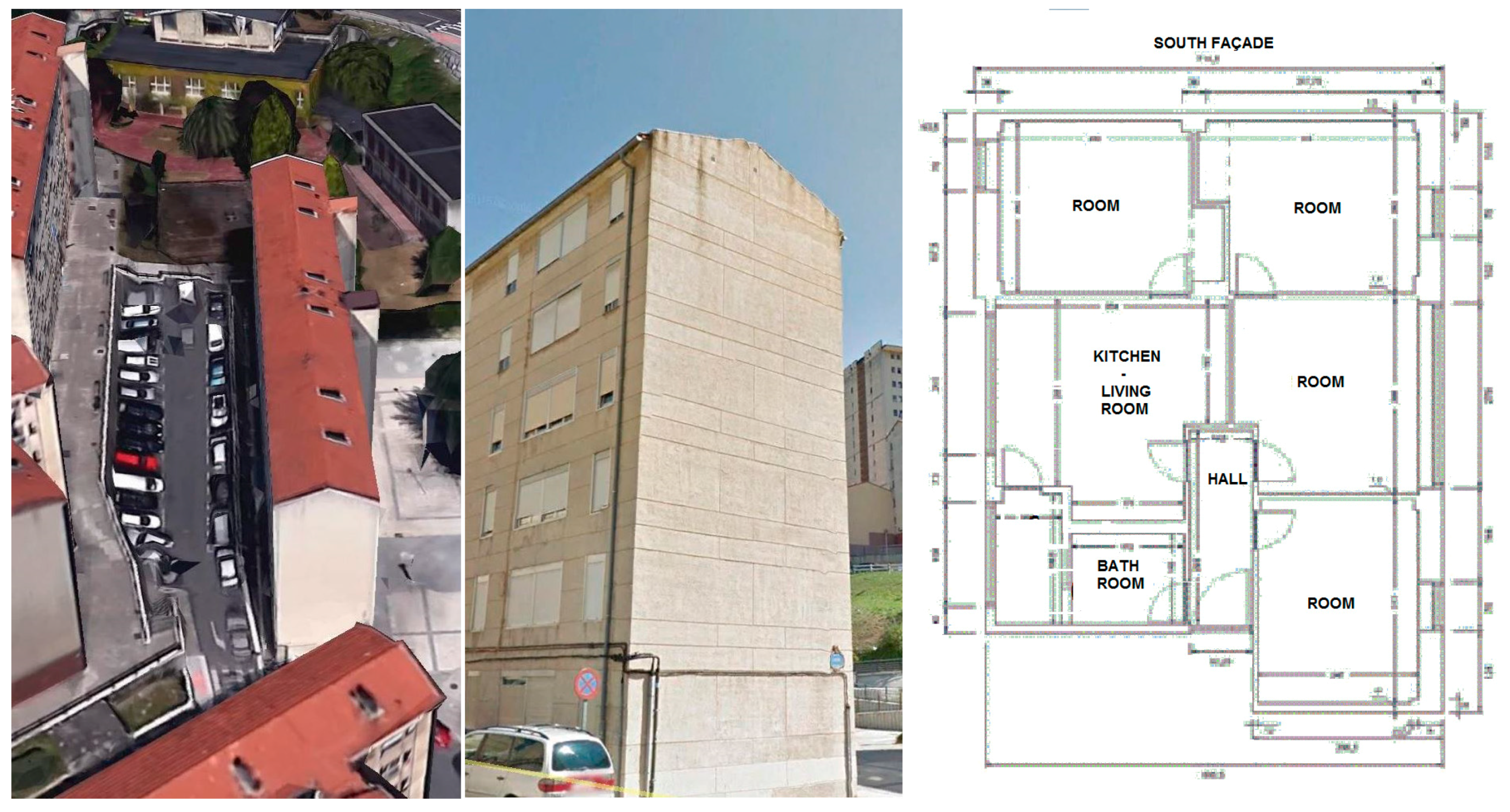
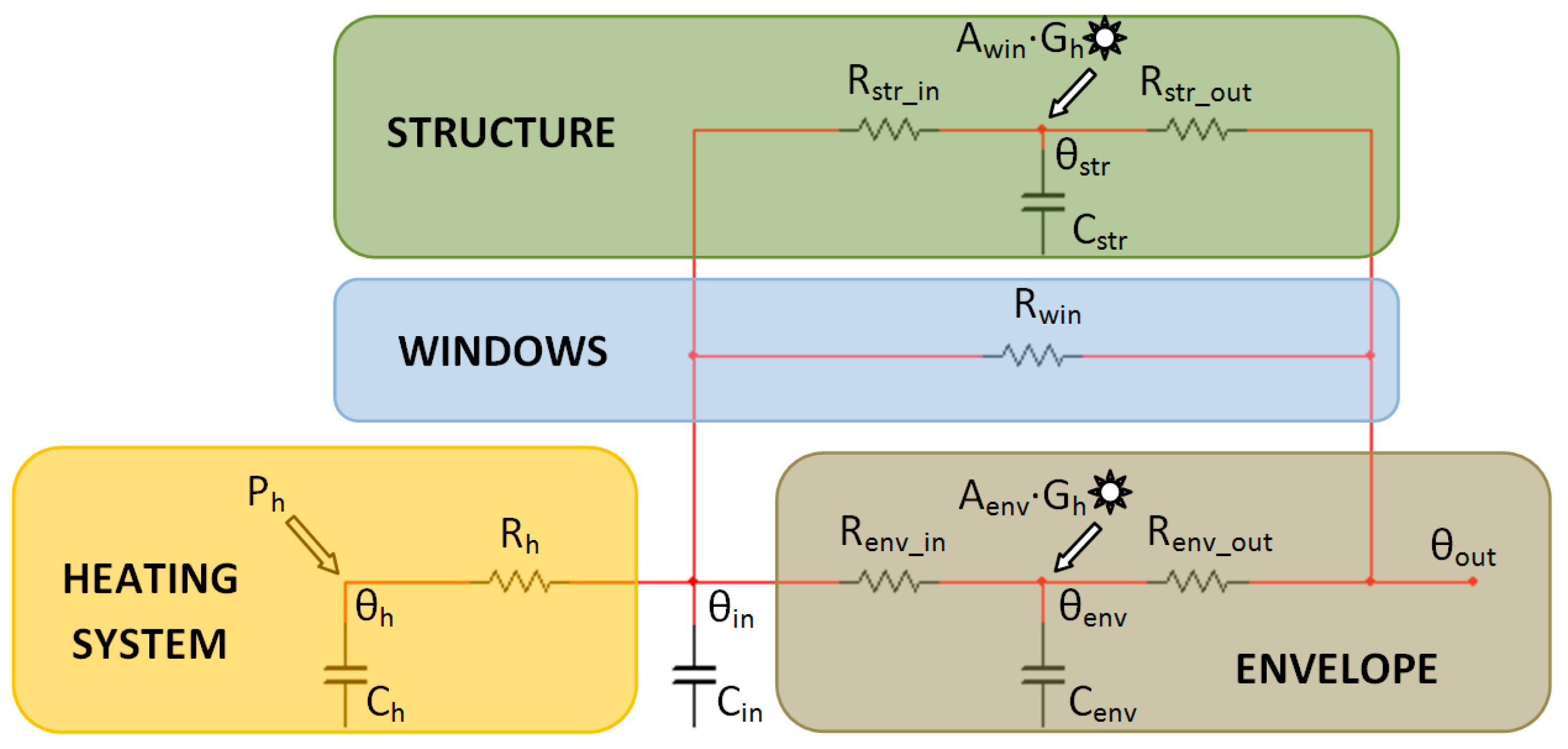
2. System Description
Comfort Conditions for Comfort Requirements
3. Model Predictive Control Scheme
4. Experimental Studies
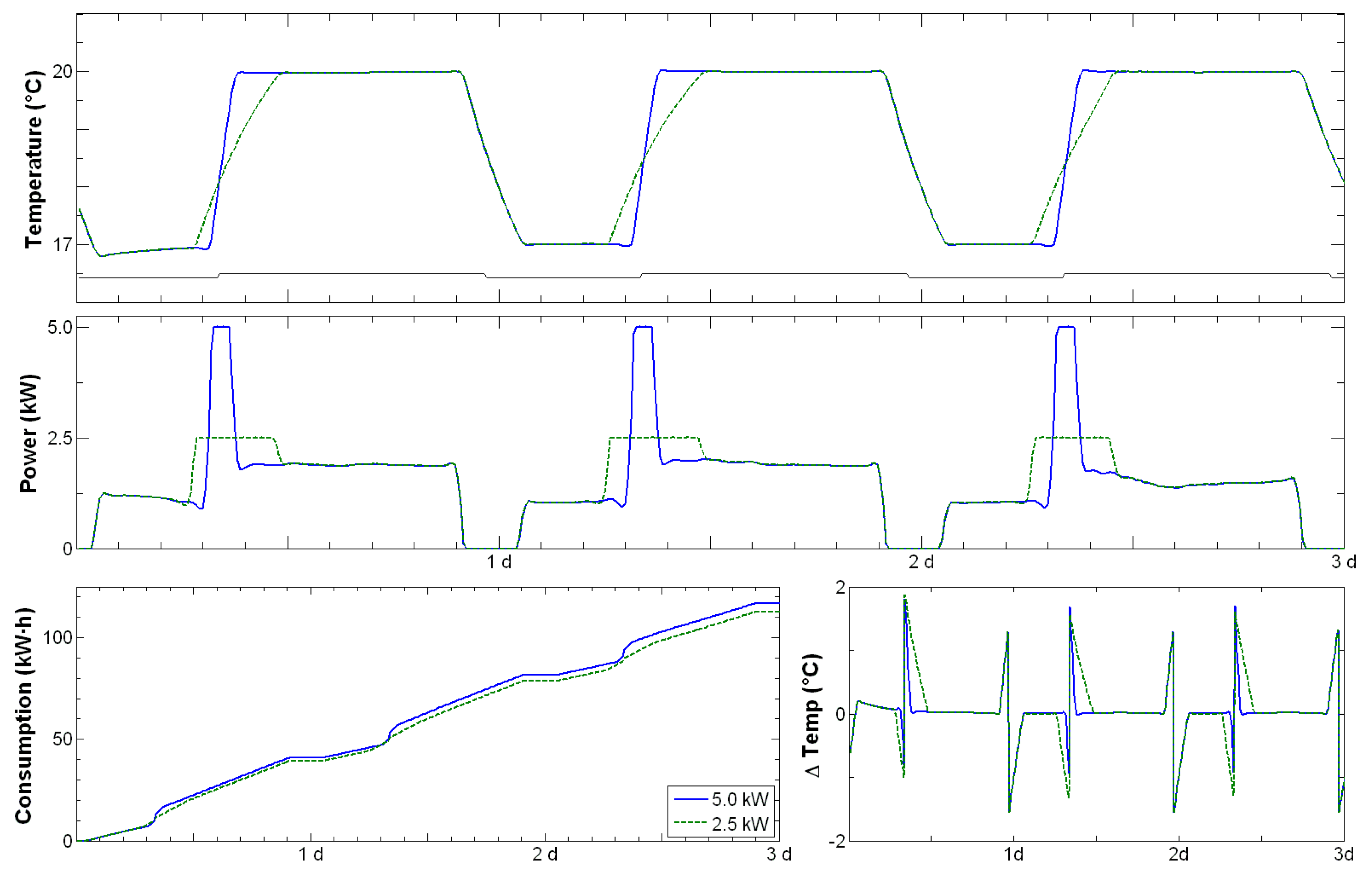
4.1. MPC Implementation
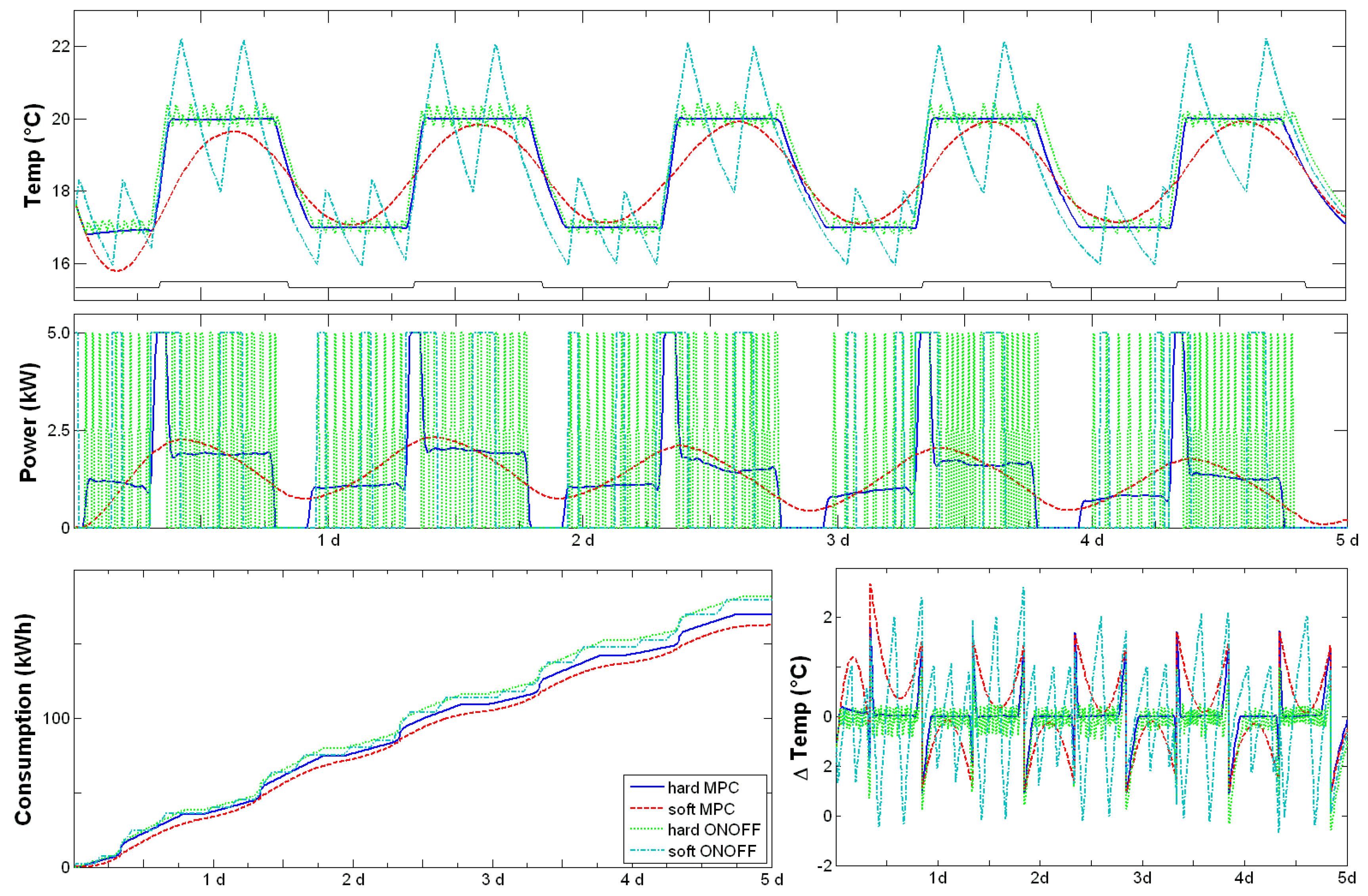
4.2. MPC vs. Histeresis Control
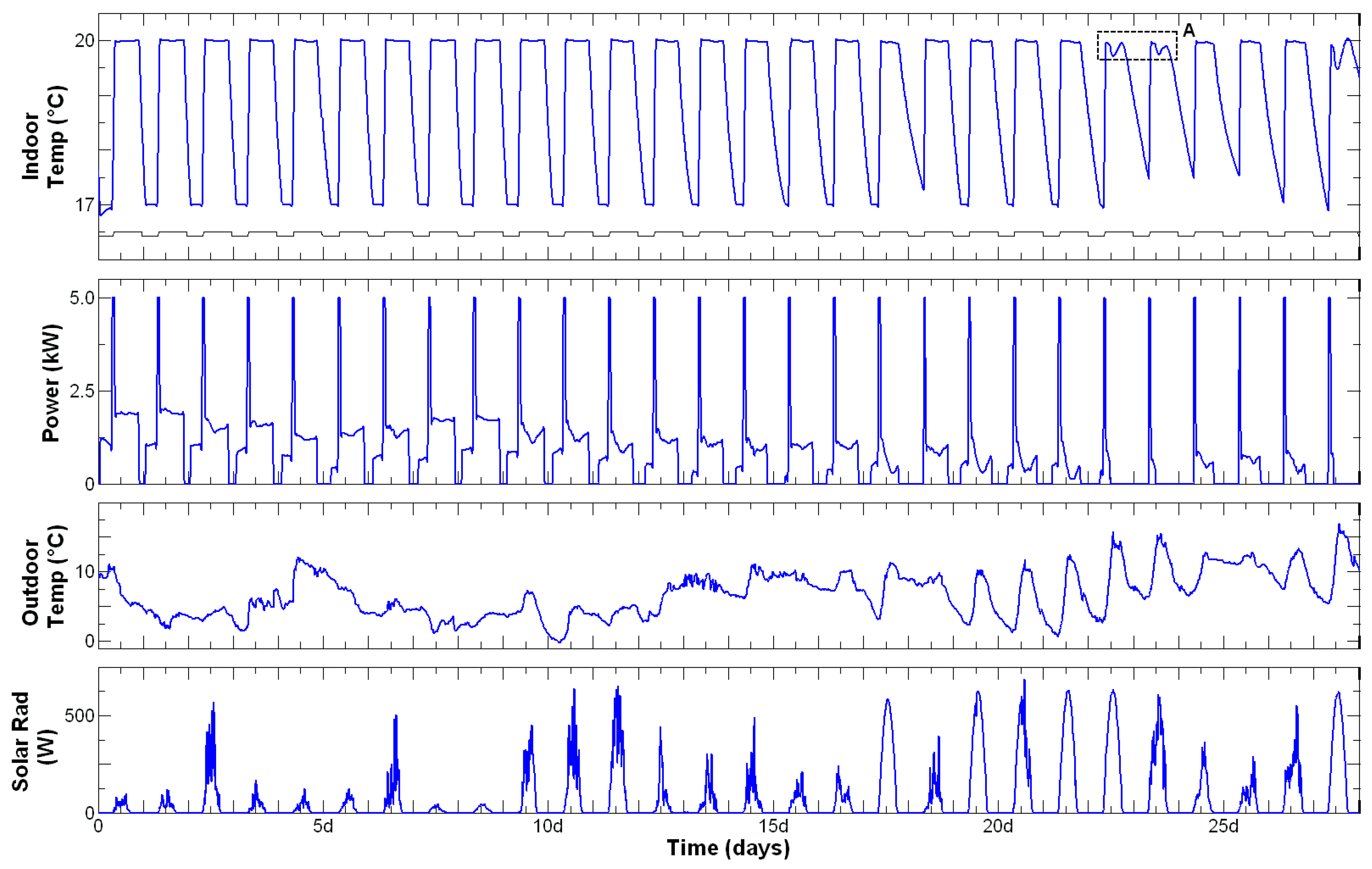
- For the same kind of control, MPC or hysteresis, the energy consumption is greater when the control tries to follow the reference in a hard way. The MPC_SOFT gets an improvement of 7% in the energy consumption respect to the MPC_HARD as can be seen in Table 3.
- A clear improvement appears when MPC and hysteresis controls are compared; when HARD models are compared the obtained improvement for the MPC is about 9.1%, when SOFT models are compared the improvement rises to 14.9%.
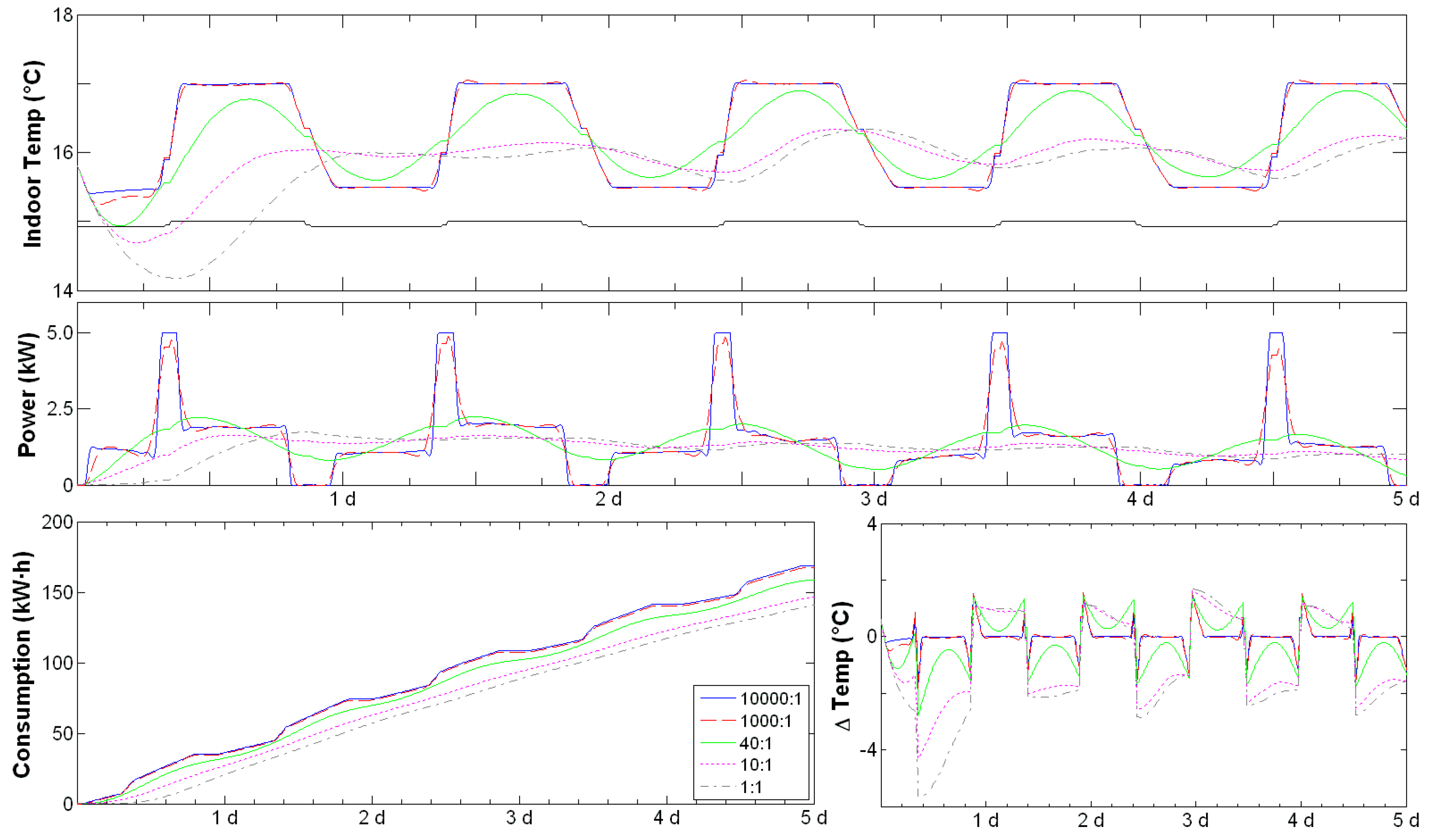
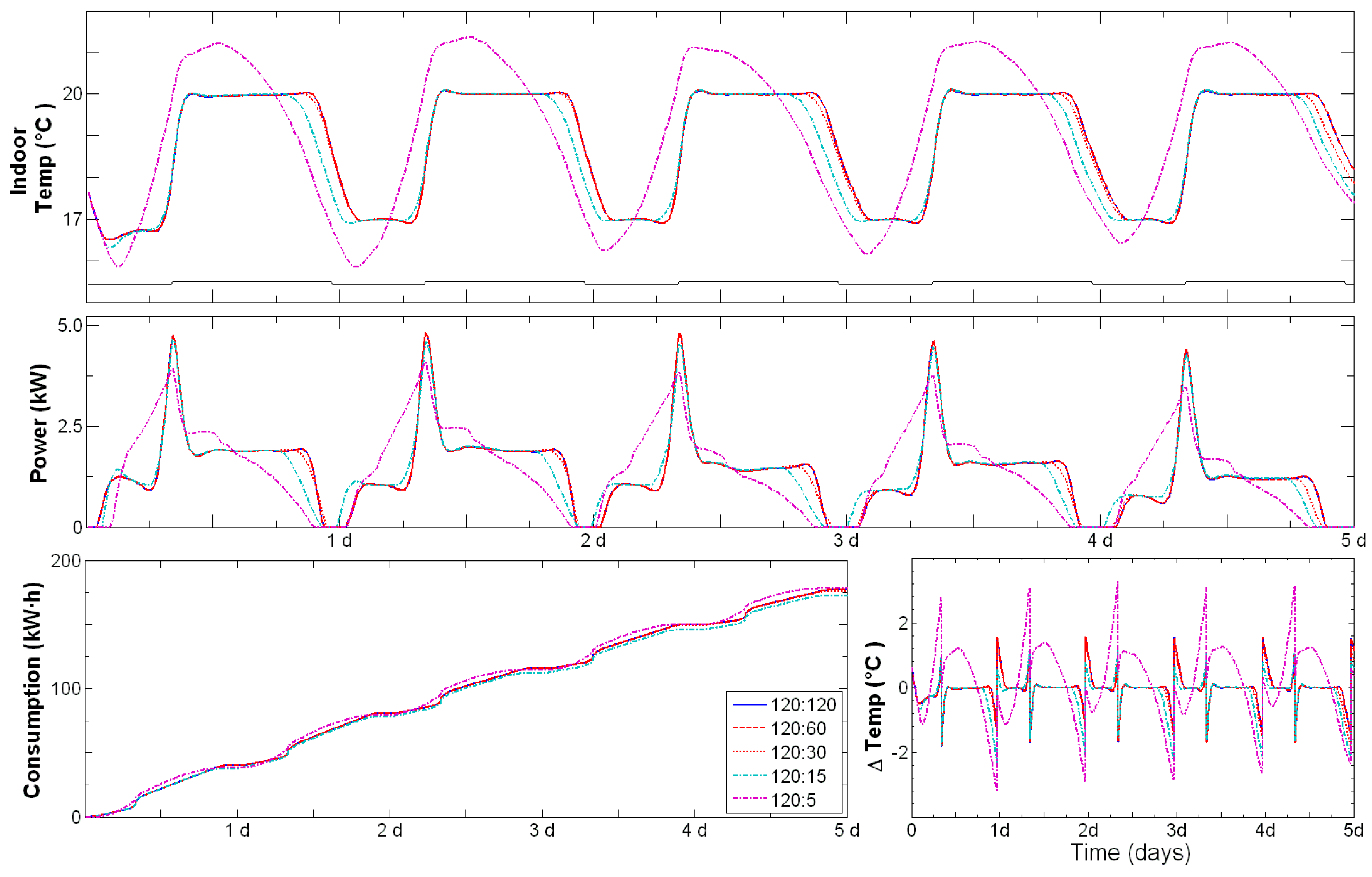
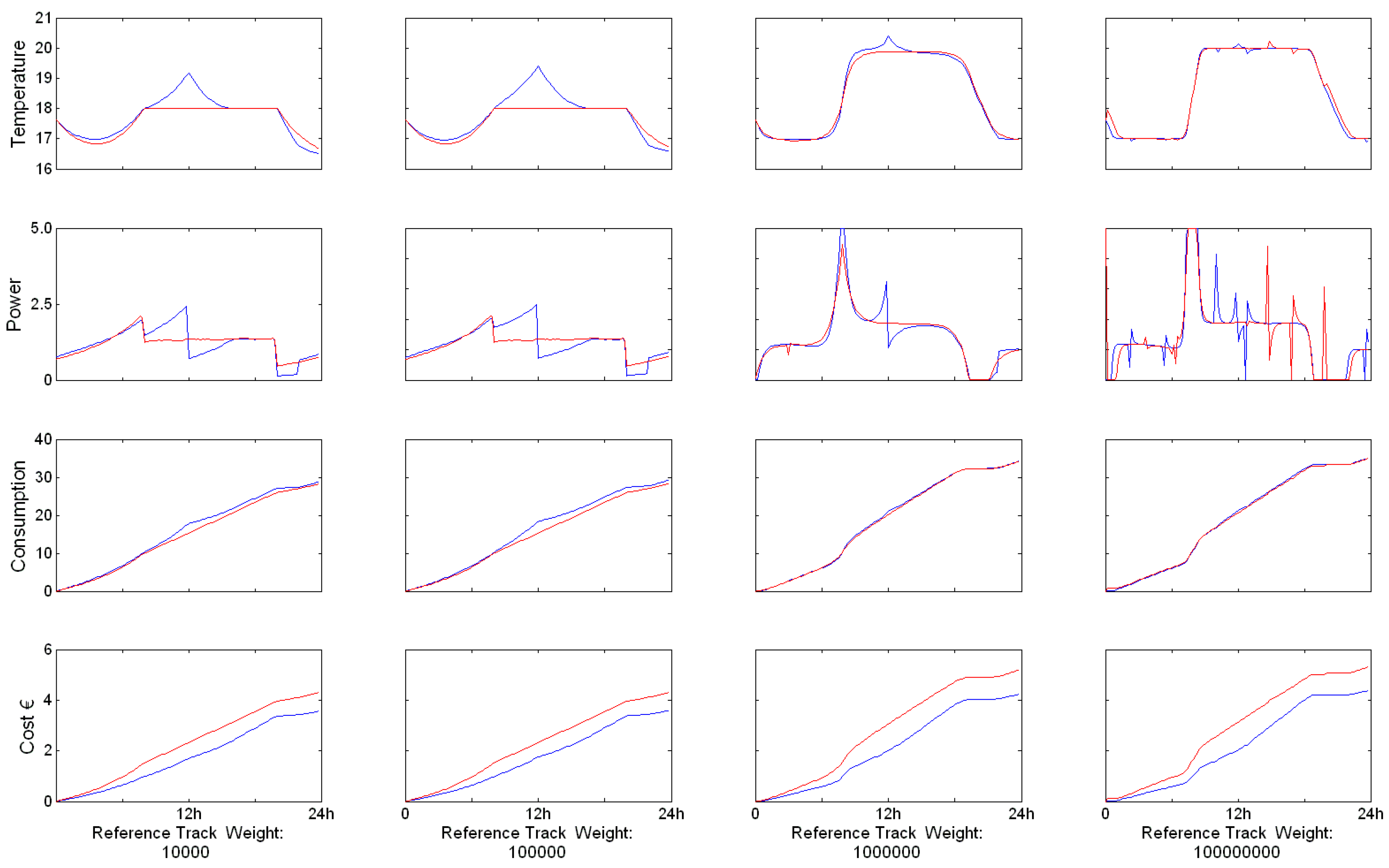
4.3. Parameters of the MPC
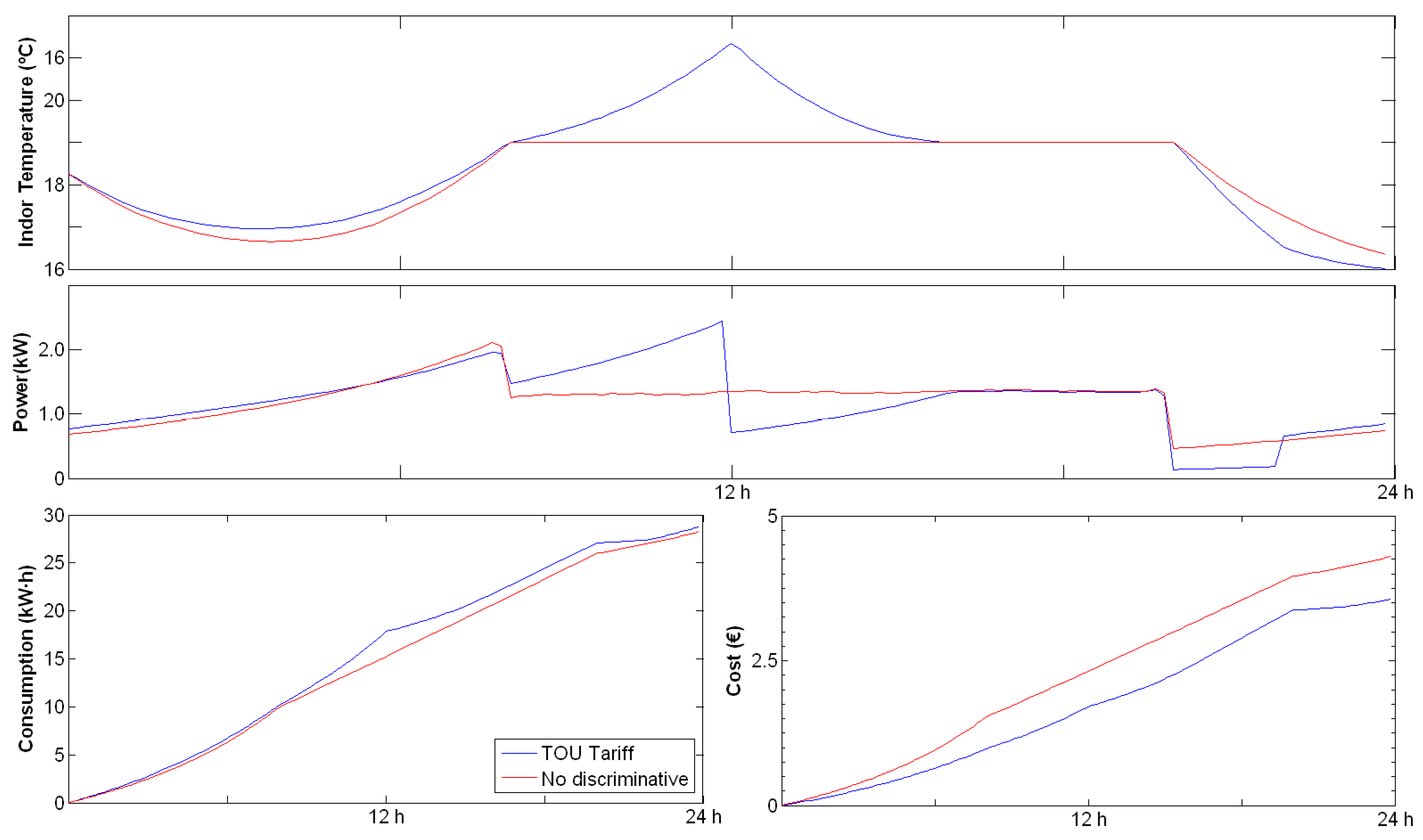
4.4. Economic Impact
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| ANN | Artificial Neural Network |
| ASHRAE | American Society of Heating, Refrigerating and Air Conditioning Engineers |
| CTSM-R | Continuous Time Stochastic Modelling package for R |
| ISO | International Standards Organization |
| LTI | Linear Time Invariant |
| MPC | Model Predictive Control |
| PPD | Percentage of People Dissatisfied |
| PMV | Predicted Mean Vote |
| PRSB | Pseudo-Random Binary Signal |
| RBC | Rule-Based Control |
| ROLBS | Randomly Ordered Logarithmically distributed Binary Sequence |
| TABS | Thermally Activated Building Systems |
| TOU | Time of Use |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
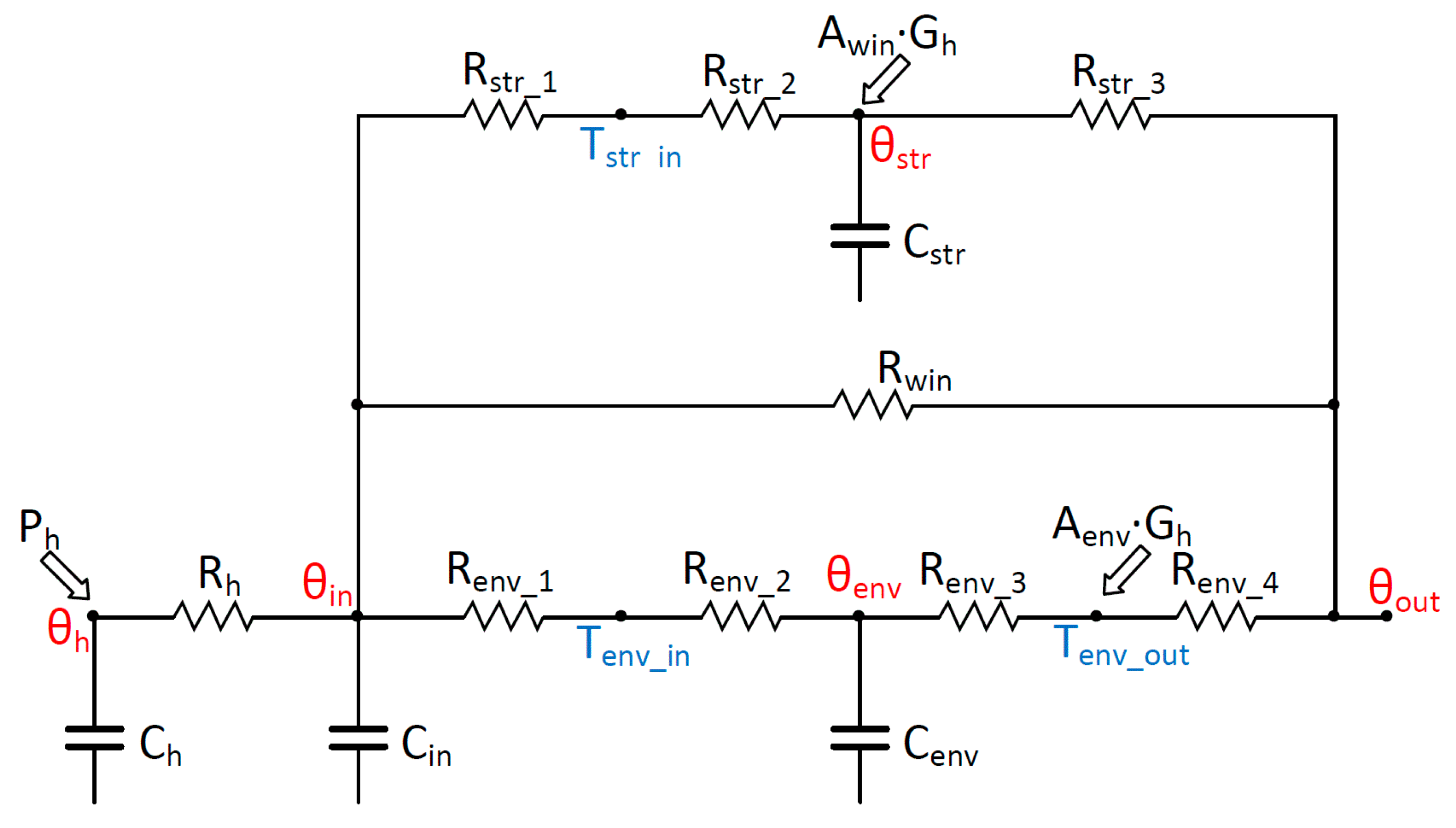
| C (MJ/K) | R (K/W) | |||
|---|---|---|---|---|
| Structure | 29.411 | Rstr_1 | 1/820 | 0.558 |
| Rstr_2 | 1/1191 | |||
| Rstr_3 | 1/1.8 | |||
| Windows | Rwin | 1/305 + 1/255 | 0.007 | |
| Envelope | 1.975 | Renv1 | 1/1259 | 0.007 |
| Renv2 | 1/338 | |||
| Renv3 | 1/338 | |||
| Renv4 | 1/1679 | |||
| Heating System | 0.001 | Rh | 1/15.5 | 0.06 |
| Air | 0.667 | |||
References
- European Commission. Energy Security Stress Tests, Security of Gas Supply, Infographic, 2014. Available online: http://ec.europa.eu/energy/stress_tests_en.htm (accessed on 15 January 2016).
- European Commission. EU Energy in Figures. Statistical Pocketbook 2014. 2014. Available online: http://ec.europa.eu/energy/observatory/statistics/statistics_en.htm (accessed on 15 January 2016).
- European Commission. The Energy-Efficient Buildings PPP: Research for Low Energy Consumption Buildings in the EU, 2014. Available online: http://ec.europa.eu/research/press/2013/pdf/ppp/eeb_factsheet.pdf (accessed on 15 January 2016).
- United Nations. Framework Convention for Climate Change Paris, 2015. Available online: http://unfccc.int/resource/docs/2015/cop21/eng/l09r01.pdf (accessed on 15 January 2016).
- Directive 2010/31/EU of the European Parliament and of the Council of 19 May 2010 on the Energy Performance of Buildings. Available online: http://eur-lex.europa.eu/LexUriServ/LexUriServ.do?uri=OJ:L:2010:153:0013:0035:EN:PDF (accessed on 15 January 2016).
- García, C.E.; Prett, D.M.; Morari, M. Model predictive control: Theory and practice—A survey. Automatica 1989, 25, 335–348. [Google Scholar] [CrossRef]
- Borrelli, F.; Bemporad, A.; Morari, M. Predictive Control for Linear and Hybrid Systems, 2015. Available online: http://www.mpc.berkeley.edu/mpc-course-material (accessed on 15 January 2016).
- Castilla, M.; Álvarez, J.D.; Normey-Rico, J.E.; Rodríguez, F. Thermal comfort control using a non-linear MPC strategy: A real case of study in a bioclimatic building. J. Process Control 2013. [Google Scholar] [CrossRef]
- Garrido, I.; Garrido, A.J.; Romero, J.A.; Carrascal, E.; Sevillano-Berasategui, G.; Barambones, O. Low Effort LI Nuclear Fusion Plasma Control Using Model Predictive Control Laws Mathematical Problems in Engineering, 2015. Available online: http://www.scopus.com/inward/record.url?eid=2-s2.0-84924530407&partnerID=40&md5=033c49cd1d4d33dadd615f87109a7c27 (accessed on 15 January 2016).
- Garrido, A.J.; Garrido, I.; Chalatsakos, O.; Vinas, A.; Villaverde, A.; Queral, V.; Romero, J.A. Modelling and control of the UPV/EHU stellarator, 2015. In Proceedings of the 23rd Mediterranean Conference on Control and Automation, Torremolinos, Spain, 16–19 June 2015; pp. 421–427. Available online: http://www.scopus.com/inward/record.url?eid=2-s2.0-84945905671&partnerID=40&md5=10726d35ca19d125f7cf9ea4cbe7d96f (accessed on 15 January 2016).
- Garrido, I.; Romero, J.A.; Garrido, A.J.; Lucchin, D.; Carrascal, E.; Sevillano-Berasategui, G. Internal inductance predictive control for Tokamaks. In Proceedings of the World Automation Congress, Waikoloa, HI, USA, 3–7 August 2014; pp. 628–633. Available online: http://www.scopus.com/inward/record.url?eid=2-s2.0-84908895118&partnerID=40&md5=8b0febfc32c2826d55834d7360f0b769 (accessed on 15 January 2016).
- Wallace, M.; Das, B.; Mhaskar, P.; House, J.; Salsbury, T. Offset-free model predictive control of a vapor compression cycle. J. Process Control 2012, 22, 1374–1386. [Google Scholar] [CrossRef]
- Wallace, M.; House, J.; Salsbury, T.; Mhaskar, P. Offset-free Model Predictive Control of a Heat Pump. Ind. Eng. Chem. Res. 2015, 54, 994–1005. [Google Scholar] [CrossRef]
- Široký, J.; Oldewurtel, F.; Cigler, J.; Prívara, S. Experimental analysis of model predictive control for an energy efficient building heating system. Appl. Energy 2011, 88, 3079–3087. [Google Scholar] [CrossRef]
- Ruelens, F.; Iacovella, S.; Claessens, B.J.; Belmans, R. Learning agent for a heat-pump thermostat with a set-back strategy using model-free reinforcement learning. Energies 2015, 8, 8300–8318. Available online: http://www.scopus.com/inward/record.url?eid=2-s2.084941710563&partnerID=40&md5=7fcf272d23477bbb15454ab2ad0b827d (accessed on 7 March 2016). [Google Scholar] [CrossRef]
- Collotta, M.; Messineo, A.; Nicolasi, G.; Pau, G. A dynamic fuzzy controller to meet thermal comfort by using neural network forecasted parameters as the input. Energies 2014, 7, 4727–4756. [Google Scholar] [CrossRef]
- Dragomir, O.E.; Dragomir, F.; Stefan, V.; Minca, E. Adaptive Neuro-Fuzzy Inference Systems as a strategy for predicting and controling the energy produced from renewable sources. Energies 2015, 8, 13047–13061. [Google Scholar] [CrossRef]
- Marvuglia, A.; Messineo, A.; Nicolosi, G. Coupling a neural network temperature predictor and a fuzzy logic controller to perform thermal comfort regulation in an office building. Build. Environ. 2014, 72, 287–299. [Google Scholar] [CrossRef]
- Garcia-Gafaro, C.; Escudero-Revilla, C.; Diarce, G.; Teres, J.; Odriozola, M. Caracterización térmica de viviendas a partir de monitorizaciones e identificación de parámetros. In Proceedings of VIII, CNIT Burgos, Spain, 19–21 June 2013; pp. 539–548.
- Van Dijk, H.A.L.; Téllez, F. Measurement and Data Analysis Procedures, Final Report of the JOULE II COMPASS project (JOU2-CT92-0216). 1995. [Google Scholar]
- Godfrey, K.R. Correlations methods. Automatica 1980, 16, 527–534. [Google Scholar] [CrossRef]
- Van der Heijde, B.; Carrascal Lecumberri, E.; Helsen, L. Experimental Method for the State of Charge Determination of a Thermally Activated Building System (TABS). In Proceedings of 13th International Conference on Energy Storage, IEA-ECES Greenstock, Beijing, China, 19–21 May 2015; Available online: https://www.researchgate.net/publication/277308406_Experimental_Method_for_the_State_of_Charge_Determination_of_a_Thermally_Activated_Building_System_TABS (accessed on 15 January 2016).
- CTSM-R Development Team. Continuous Time Stochastic Modeling CTSM: User’s Guide and Reference manual. Version 1.0.0. 2015. Available online: http://ctsm.info (accessed on 28 March 2016).
- Gutschker, O. Parameter identification with the software package LORD. Build. Environ. 2008, 43, 163–169. [Google Scholar] [CrossRef]
- De Coninck, R.; Magnusson, F.; Åkesson, J.; Helsen, L. Toolbox for development and validation of grey-box building models for forecasting and control. J. Build. Perform. Simul. 2015. [Google Scholar] [CrossRef]
- TRNSYS 17: A Transient System Simulation Program; Solar Energy Laboratory, University of Wisconsin: Madison, WI, USA, 2010; Available online: http://sel.me.wisc.edu/trnsys (accessed on 28 March 2016).
- EnergyPlus; U.S. Department of Energy (DOE). Available online: https://energyplus.net/ (accessed on 28 March 2016).
- Gyalistras, D.; Gwerder, M. Use of Weather and Occupancy Forecasts for Optimal Building Climate Control (OptiControl): Two Years Progress Report; Technical Report; ETH Zurich and Siemens Building Technologies Division, Siemens Switzerland Ltd.: Zug, Switzerland, 2009. [Google Scholar]
- Gwerder, M.; Gyalistras, D.; Sagerschnig, C.; Smith, R.S.; Sturzenegger, D. Final Report: Use of Weather and Occupancy Forecasts for Optimal Building Climate Control—Part II: Demonstration (OptiControl-II); Automatic Control Laboratory, ETH Zurich: Zug, Switzerland, 2013; p. 156. [Google Scholar]
- Sourbron, M. Dynamic Thermal Behavior of Buildings with Concrete Core Activation. Ph.D. Thesis, KU Leuven, Leuven, Belgium, September 2012. [Google Scholar]
- Ashouri, A.; Petrini, F.; Bornatico, R.; Benz, M.J. Sensitivity analysis for robust design of building energy systems. Energy 2014, 76, 264–275. [Google Scholar] [CrossRef]
- KU Leuven and 3E. Open-IDEAS Source Code Repository, 2014. Available online: https://github.com/open-ideas (accessed on 15 January 2016).
- Åkesson, J.; Årzén, K.-E.; Gäfvert, M.; Bergdahl, T.; Tummescheit, H. Modeling and Optimization with Optimica and JModelica.org—Languages and Tools for Solving Large-Scale Dynamic Optimization Problems. Comput. Chem. Eng. 2010, 34, 1737–1749. [Google Scholar] [CrossRef]
- Lin, Y.; Middelkoop, T.; Barooah, P. Identification of control-oriented thermal models of rooms in multi-room buildings. In Proceedings of the 2012 IEEE 51st Annual Conference on Decision and Control (CDC), Maui, HI, USA, 10–13 December 2012.
- Verbai, Z.; Lakatos, A.; Kalmár, F. Prediction of energy demand for heating residential buildings using variable degree day. Energy 2014, 76, 780–787. [Google Scholar] [CrossRef]
- Gwerder, M.; Lehmann, B.; Tödtli, J.; Dorer, V.; Renggli, F. Control of thermally-activated building systems (TABS). Appl. Energy 2008, 85, 565–581. [Google Scholar] [CrossRef]
- Bacher, P.; Madsen, H. Procedure for Identifying Models for the Heat Dynamics of Buildings; Technical Report; IMM Technical University of Denmark DTU: Lyngby, Denmark, 2010. [Google Scholar]
- Bacher, P.; Madsen, H. Identifying suitable models for the heat dynamics of buildings. Energy Build. 2011, 43, 1511–1522. [Google Scholar] [CrossRef] [Green Version]
- Kristensen, N.R.; Madsen, H. Continuous Time Stochastic Modelling—Mathematics Guide; Technical University of Denmark DTU: Lyngby, Denmark, 2003; Available online: http://www.imm.dtu.dk/~ctsm/MathGuide.pdf (accessed on 15 January 2016).
- De Coninck, R.; Helsen, L. Practical implementation and evaluation of model predictive control for an office building in Brussels. Energy Build. 2016, 111, 290–298. [Google Scholar] [CrossRef]
- Verhelst, C.; Logist, F.; Impe, J.V.; Helsen, L. Study of the optimal control problem formulation for modulating air-to-water heat pumps connected to a residential floor heating system. Energy Build. 2012, 45, 43–53. [Google Scholar] [CrossRef]
- Maasoumy, M. Modeling and Optimal Control Algorithm Design for HVAC Systems in Energy Efficient Buildings. Master’s Thesis, University of California, Berkeley, CA, USA, February 2011. [Google Scholar]
- Sturzenegger, D.; Gyalistras, D.; Morari, M.; Smith, R. Semiautomated modular modeling of buildings for model predictive control. In Proceedings of the Fourth ACM Workshop on Embedded Sensing Systems for Energy-Efficiency in Buildings, Toronto, ON, Canada, 6 November 2012; pp. 99–106.
- CTE DB-HE 2013. Technical Building Code Basic Document-Basic Requirements Energy Saving; Ministry of Development: Madrid, Spain, 2013; Available online: http://www.codigotecnico.org/index.php/menu-ahorro-energia (accessed on 15 January 2016).
- Nicol, J.F.; Humphreys, M.A. Adaptive thermal comfort and sustainable thermal standards for buildings. Energy Build. 2002, 34, 563–572. [Google Scholar] [CrossRef]
- ASHRAE 55, Thermal Environmental Conditions for Human Occupancy; American Society of Heating, Refrigerating, and Air-Conditioning Engineers, ASHRAE: Atlanta, GA, USA, 2013; Available online: https://www.ashrae.org/resources--publications/bookstore/standard-55 (accessed on 7 March 2016).
- ISO 7730:2005—Ergonomics of the Thermal Environment. 2015. Available online: http://www.iso.org/iso/home/store/catalogue_tc/catalogue_detail.htm?csnumber=39155 (accessed on 7 March 2016).
- CPLEX Optimization Software Package. IBM. Available online: http://www-01.ibm.com/software/commerce/optimization/cplex-optimizer/ (accessed on 15 January 2016).
- Löfberg, J. YALMIP: A Toolbox for Modeling and Optimization in MATLAB. In Proceedings of the CACSD Conference, Taipei, Taiwan, 2–4 September 2004; Available online: http://users.isy.liu.se/johanl/yalmip/pmwiki.php (accessed on 15 January 2016).
- Cho, S.H.; Zaheer-uddin, M. Predictive control of intermittently operated radiant floor heating systems. Energy Convers. Manag. 2003, 44, 1333–1342. [Google Scholar] [CrossRef]










| Hysteresis | Day | Night | ||
|---|---|---|---|---|
| Upper Limit | Lower Limit | Upper Limit | Lower Limit | |
| hys_HARD | Tref + 0.1 °C | Tref − 0.1 °C | Tref + 0.1 °C | Tref − 0.1 °C |
| hys_SOFT | Tref + 2 °C | Tref − 2 °C | Tref + 1 °C | Tref − 1 °C |
| MPC | Weight for (ω − θin) Q (1/K2) | Weight for u R (1/W2) |
|---|---|---|
| MPC_HARD | 10,000 | 1 |
| MPC_SOFT | 40 | 1 |
| Control | Energy Consumption (kW·h) |
|---|---|
| hys_HARD | 700 |
| hys_SOFT | 692.125 |
| MPC_HARD | 639.070 |
| MPC_SOFT | 596.322 |
| Weight Relation Q:R | Energy Consumption (kW·h) | Hours of Thermal Discomfort (h·K) |
|---|---|---|
| 10,000:1 | 636.681 | 0 |
| 1000:1 | 623.914 | 0 |
| 40:1 | 584.848 | 0 |
| 10:1 | 547.625 | 20.12 |
| 1:1 | 542.678 | 61.32 |
| TOU Tariff | No Discriminative Tariff | |
|---|---|---|
| Peak 12:00 a.m.–22:00 p.m. | Valley 22:00 p.m.–12:00 a.m. | |
| 0.17977 €/kW·h | 0.09572 €/kW·h | 0.15207 €/kW·h |
| Reference Tracking Weight | Economic Savings% (TOU vs. No Discriminative) | Economic Savings% (TOU vs. No Discriminative with TOU Tariff) |
|---|---|---|
| 10,000 | ~19% | ~4.2% |
| 100,000 | ~18% | ~4.25% |
| 1.0 × 106 | ~20% | ~4.2% |
| 1.0 × 108 | ~19% | ~0.5% |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Carrascal, E.; Garrido, I.; Garrido, A.J.; Sala, J.M. Optimization of the Heating System Use in Aged Public Buildings via Model Predictive Control. Energies 2016, 9, 251. https://doi.org/10.3390/en9040251
Carrascal E, Garrido I, Garrido AJ, Sala JM. Optimization of the Heating System Use in Aged Public Buildings via Model Predictive Control. Energies. 2016; 9(4):251. https://doi.org/10.3390/en9040251
Chicago/Turabian StyleCarrascal, Edorta, Izaskun Garrido, Aitor J. Garrido, and José María Sala. 2016. "Optimization of the Heating System Use in Aged Public Buildings via Model Predictive Control" Energies 9, no. 4: 251. https://doi.org/10.3390/en9040251
APA StyleCarrascal, E., Garrido, I., Garrido, A. J., & Sala, J. M. (2016). Optimization of the Heating System Use in Aged Public Buildings via Model Predictive Control. Energies, 9(4), 251. https://doi.org/10.3390/en9040251