1. Introduction
Increasing concerns about the natural environment and growing shortages of petroleum resources have driven many researchers to develop electric vehicles (EV). Due to a wide range of variable driving circumstances, such as load and vehicle speed, the operating point of a motor constantly changes. The working area of the motor, which matches a driving scenario involving accelerating, cruising, and slope climbing, is the main requirement for motor design.
EV motors are traditionally designed to satisfy the basic requirements of rated or maximum power, torque, and speed based on the driving conditions of acceleration and speed. For example, Kahourzade
et al. [
1] discussed a comprehensive design of a 10-kW axial-flux permanent-magnet (AFPM) motor for an EV direct drive based on the power and torque requirement. Lindh
et al. [
2] designed an interior permanent-magnet synchronous motor (PMSM) for traction application to meet the requirements of torque and speed (TN) under the constraints of voltage and current using an optimization process; however, the resulting torque and speed curve was determined by tuning the number of turns, the torque, and the current ratio. One drawback of the traditional motor design is that a close relationship does not exist between the TN curve and the motor parameters.
A better design methodology could include a target TN curve with two operation zones: constant torque and constant power, under the constraints of motor drive. A third operation zone could be extended using the field-weakening control [
3]. Qi
et al. [
4] developed a method for predicting the flux-weakening performance of permanent-magnet (PM) brushless alternating current (AC) machines based on a
d-
q-axis flux linkage model in order to analyze the maximum working area of the TN curve using the finite element (FE) method. They formulated the TN equations in terms of motor parameters, such as PM flux,
d-
q-axis inductances, and phase resistance, as well as driving voltage and current. A similar analysis method was used for switched-flux permanent-magnet (SFPM) machines [
5]. Unfortunately, those formulas were not used to determine the motor parameters. Therefore, rough specifications of maximum torque, base speed, and maximum speed based on the TN curve only provide a rough baseline for designing a motor. It is very possible that this type of motor is either over-designed or under-designed, which would mean that the motor drive must be re-selected and tuned so that the motor can be integrated into the vehicle propulsion system. Furthermore, since an EV operates over a wide torque-speed range in response to various driving conditions, the motor design process should consider overall energy consumption. The high efficiency operating region of the current PM motors used in EVs is typically designed around either the rated operating point [
6] or several frequent operating points [
7]. To date, the integration of driving cycles into the design optimization of an electric driveline has received limited attention in the literature.
This paper proposes a novel approach for designing an AFPM motor for EVs. The design methodology is divided into four stages. First, a target TN curve based on a driving scenario, battery capabilities, motor drive pattern, and basic torque and voltage equations of the proposed motor is specified in
Section 2. This target TN curve is closely related to the back electromotive force (EMF) constant, phase inductance, and phase resistance of the motor. Second, the magnetic circuit model with a quasi-3-dimensional (quasi-3D) motor configuration is provided in
Section 3. Third, an optimal motor shape is determined using three objectives—minimizing motor weight, maximizing motor efficiency at the rated operating point, and minimizing energy loss (EL) over various driving cycles—as described in
Section 4. Fourth, FE verification of the proposed motor is presented in
Section 5. Finally,
Section 6 presents the study’s conclusions.
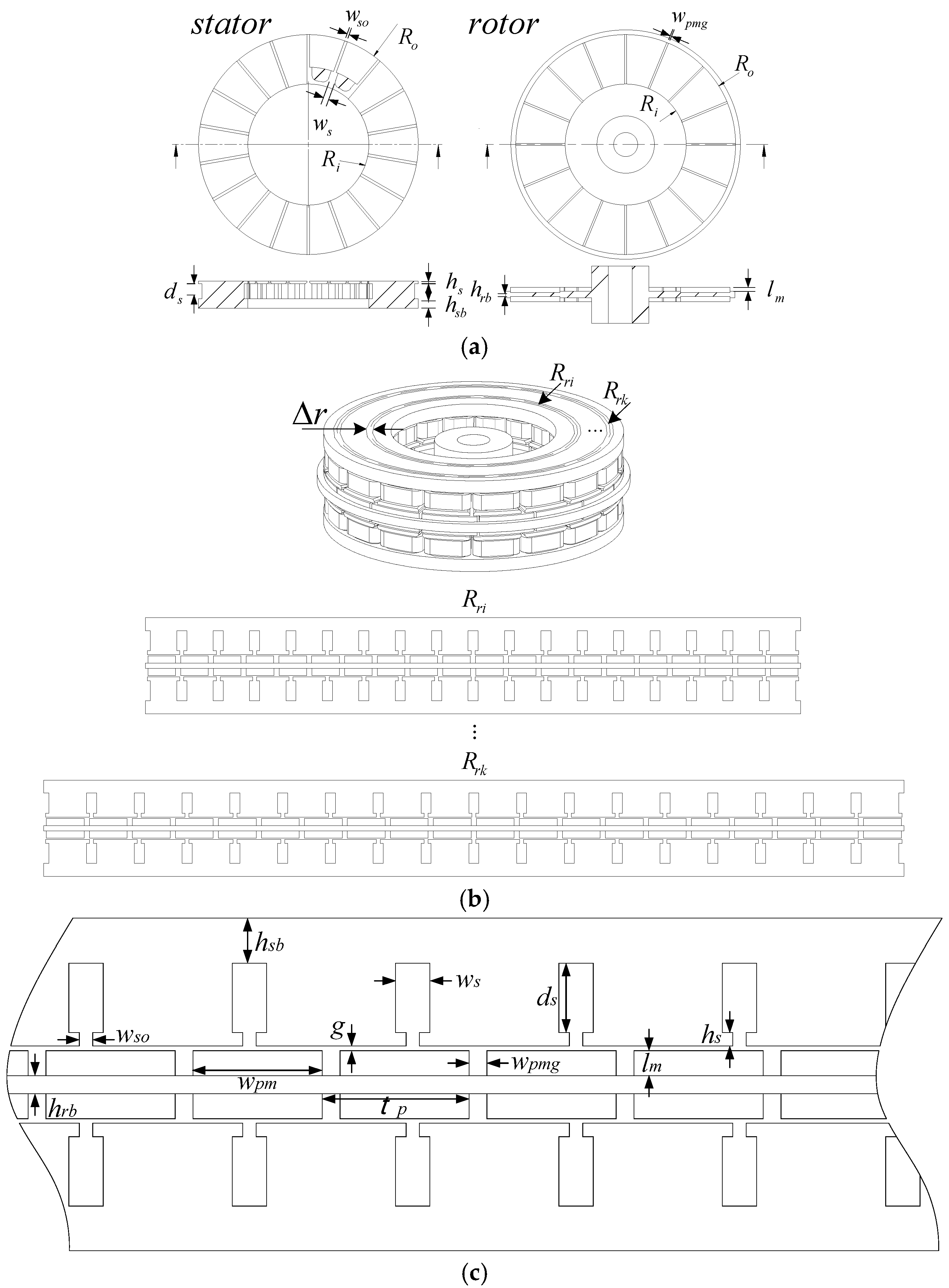
3. Quasi-3-Dimensional Magnetic Circuit Model
All of the design parameters of the AFPM motor shown in
Figure 5a for the EV are presented in
Table 3. It is approximately to slice the AFPM motor into rings of different radii, and each ring is extended as a 2-dimensional (2D) linear machine, as shown in
Figure 5b [
9].
Figure 5c shows a cross-section of each ring of the AFPM motor along a circumference of a radius ranging between
Ro and
Ri. The circumferential coordinate is denoted by
x.
It is assumed that there is no fringing effect and no magnetic flux in the radial direction, so that each of the linear machines is independent. The overall performance of an AFPM motor will be the sum of the performance of all of the linear machines when a linear magnetic property is assumed in the following magnetic circuit analysis. The air-gap flux density distribution for slotless configuration is adopted from [
10]:
where
Br is the remanence flux density and α
p is the ratio between the magnet width
wpm and the pole pitch τ
p. As the rotor rotates, the relative position of the rotor and stator, which is defined as the rotor shift
s, varies, and the air-gap flux density is not only a function of peripheral coordinate
x but also a function of rotor shift
s. By considering the stator slotting effect, the air-gap flux density must be reduced by additional air-gap reluctance. The air-gap flux density distribution function is then modified as:
where Π(
x) is the relative permeance, which is defined as the ratio between the equivalent air gap with and without slots, as follows:
where
ge is the effective air-gap length and
μR is the recoil permeability of the magnet [
11].
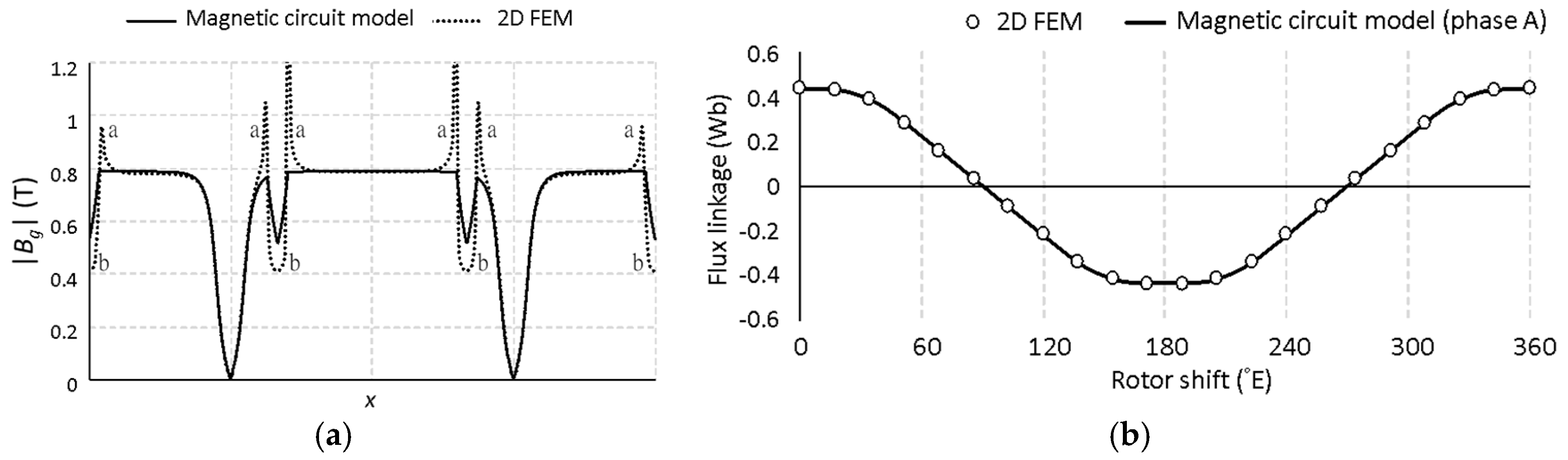
This air-gap flux density distribution is compared with the result obtained from the 2D FE method for an example of
s = 0°E, as shown in
Figure 6a. In the FE analysis, the flux density becomes high near the fringe of the slot (location a) because of the flux saturation that was not modeled on the vertex of the stator teeth in the magnetic circuit model. A modeling error near the center of the slot (location b) also causes modeling errors in the preliminary motor design. The corresponding flux linkage of phase A is calculated, and it matches very well with the value obtained using the 2D FE method, as shown in
Figure 6b.
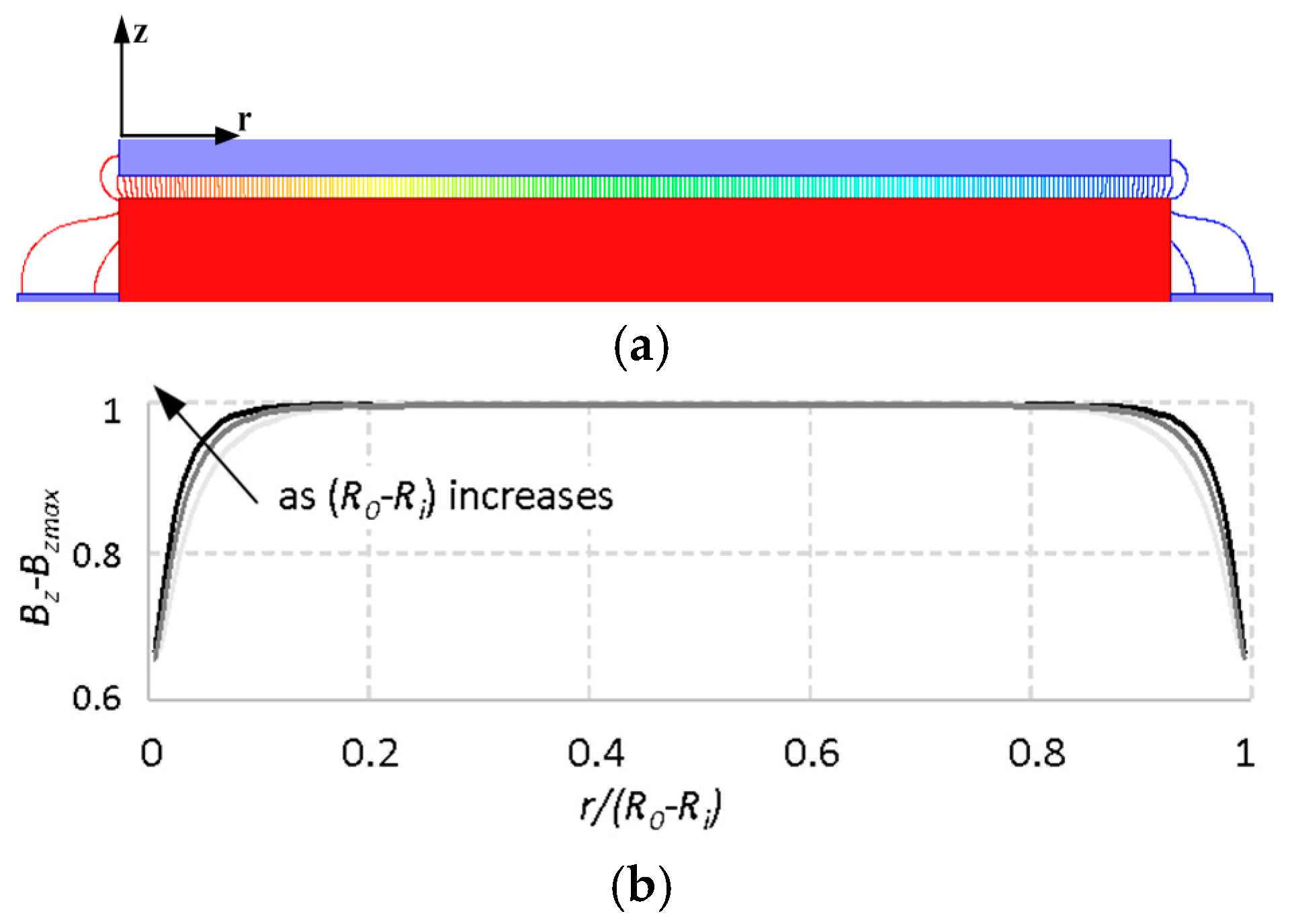
Azzouzi
et al. [
12] presented an interesting approach that allows us to consider the fringing effect. From the 2D FE analysis, the air-gap flux density distribution in the radial direction (
r) is illustrated in
Figure 7a. Therefore, a dimensionless fringing-effect coefficient
Λ(
r) =
Bz/Bz-maz is calculated, as shown in
Figure 7b, where
Bz(
r) is the air-gap flux density function in the radial direction and its maximum value
Bz-max occurs in the middle range between
Ro and
Ri. As (
Ro–Ri) increases, the fringing-effect coefficient increases near
Ri and
Ro. Thus, the air-gap flux density distribution function in Equation (25) is modified as:
5. Finite Element Analysis
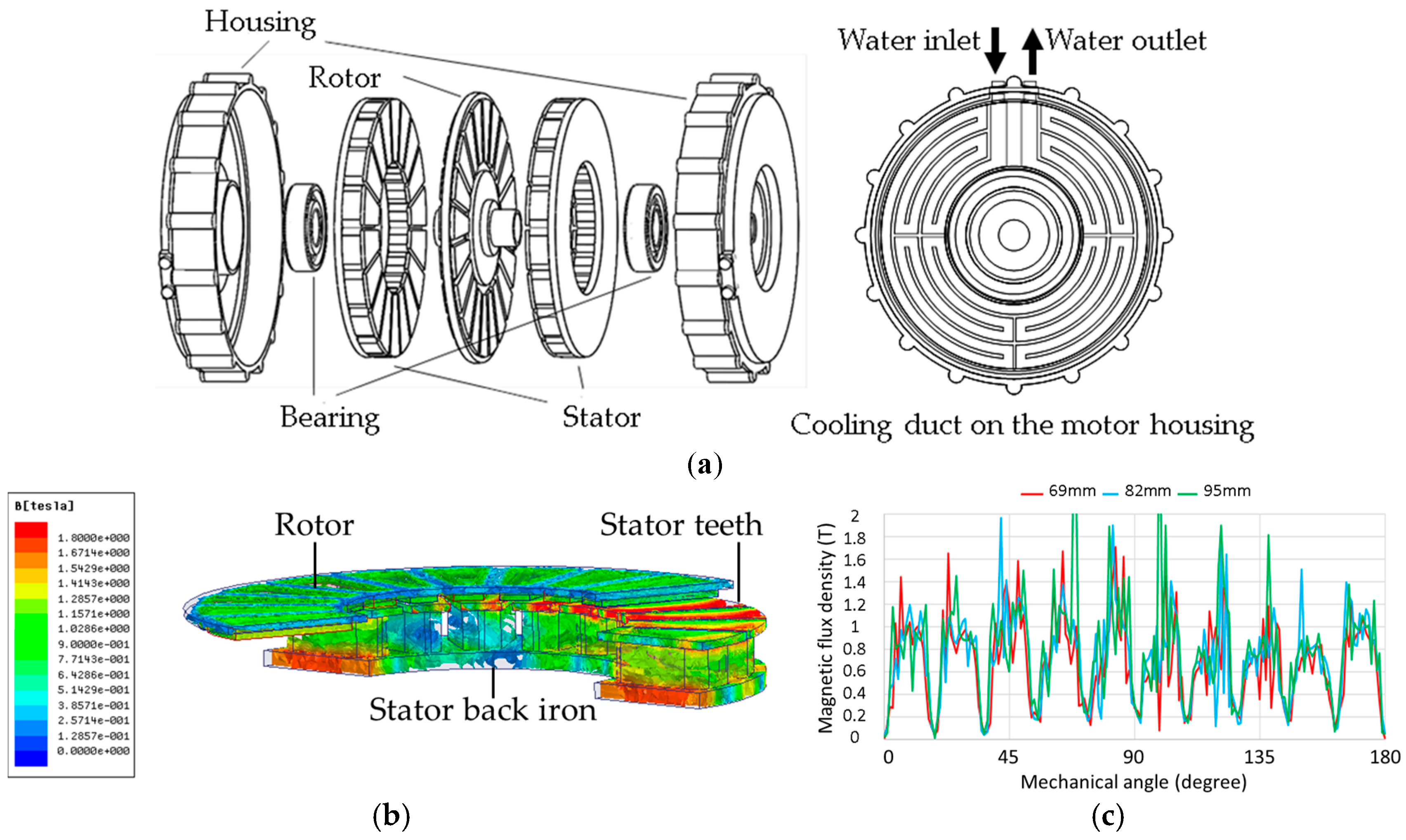
The above optimization results were obtained from the quasi-3D magnetic circuit model, which is usually relatively imprecise because of the assumption of linear properties and the simplified motor configuration. The exploded view of the proposed AFPM motor is illustrated in
Figure 9a, where the motor housing on each side of the stator is responsible for dissipating heat loss via the water-cooling duct. It is necessary to apply FE analysis to verify the optimal design results. The magnetic flux density distributions in the rotor, stator, and air gap at the peak phase current of 200 A are illustrated in
Figure 9b,c. The maximum flux density of 1.8 T occurs at some locations on the stator teeth and the back iron as well as in the air gap along the outer radius near 95 mm. Thus, the motor performances were analyzed in terms of the back EMF wave, the TN curve, the efficiency map, the EL over various driving cycles, and the heat dissipation properties.
5.1. Back Electromotive Force Constant Analysis
The electromagnetic analysis tool, Maxwell 3D of ANSYS, was used to verify the performance of the motor that was designed using the quasi-3D magnetic circuit model. The back EMF wave of the motor was obtained by taking the derivative of the three-phase flux linkages. Without loading, the back EMF of the motor is close to a sinusoidal wave, which is composed of a fundamental harmonic of 91.99%, a third harmonic of 6.72%, a fifth harmonic of 0.52%, and less than 1% of the rest higher order harmonics. The flux linkages of the
d and
q axes are transformed from the three-phase flux linkages. Without input current excitation, the
q-axis flux linkage
λq equals 0, while the
d-axis flux linkage λ
d is 0.0473 Wb, which is also the same as the magnet flux linkage λ
m. Thus, the back EMF constant
Ke is calculated as 0.473 V/rad/s. This is approximately 2.47% different from the back EMF constant
Ke found in Case 1 (
Table 4), which was obtained using the magnetic circuit model, and it is within the lower and upper bounds required by the driving scenario shown in
Table 2.
5.2. Torque and Speed Curve and Efficiency Map
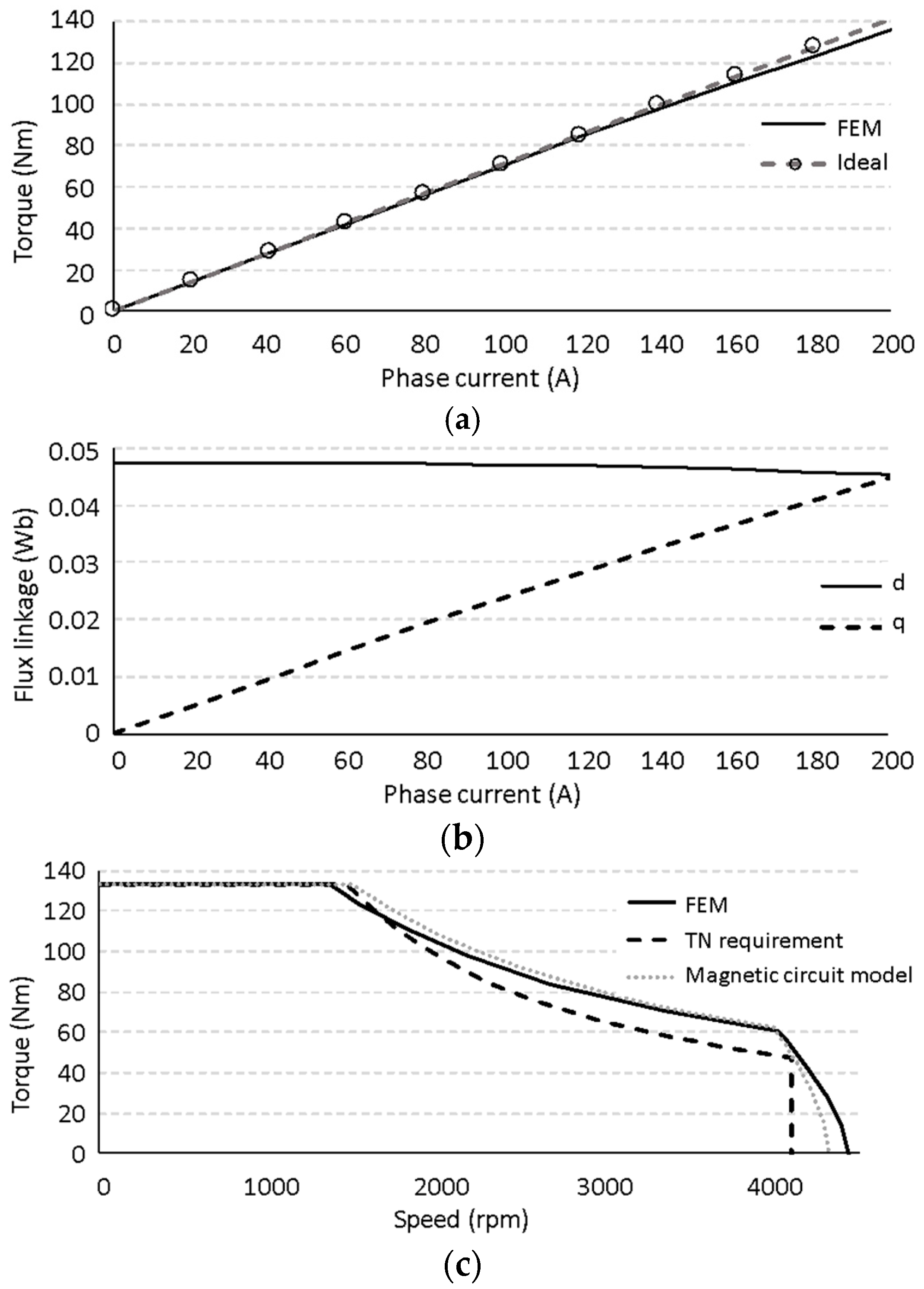
Since the phase current
Iph is assumed to enter the
q-axis, the torque
versus phase current curve was obtained using the nonlinear FE tool, as shown in
Figure 10a. This curve matches the dashed line with circles; each torque was calculated by substituting
Ke = 0.473 V/rad/s from the no load analysis into Equation (15). The larger error occurs at the high input current due to magnetic flux saturation.
The cross-coupling effect of the
d-axis and
q-axis inductances and the magnetic flux saturation were found to have little influence on the linearity between the
q-axis flux linkage and the phase current, as shown in
Figure 10b. The
d-axis and
q-axis inductances are 237.18 μH and 244.37 μH, respectively. The maximum phase current
Iph-max = 195.5 A, which is a little lower than the maximum phase current value in the original motor that was designed using the quasi-3D magnetic circuit model, was found to satisfy the required maximum torque of 133.2 Nm. When that value was combined with the DC current limit
IDC-max = 81.8 A, shown in
Table 2, the resulting TN curve was obtained and compared with the TN curve required by the three driving scenarios and the TN curve obtained using the magnetic circuit model, as shown in
Figure 10c.
It was found that the operation range of the proposed motor was wider than the TN curve that was obtained using the magnetic circuit model in zone III. As shown in
Table 5, the maximum motor speed was increased by 2.5% because the final back EMF constant was smaller than the back EMF constant obtained using the magnetic circuit model. The difference in operation zone II is due to the fact that the phase inductance obtained using FE analysis is higher than the phase inductance obtained using the magnetic circuit model. Due to the coupling effect of phase inductance and resistance, the first corner speed from the FE analysis was found to be slightly lower than the required corner speed.
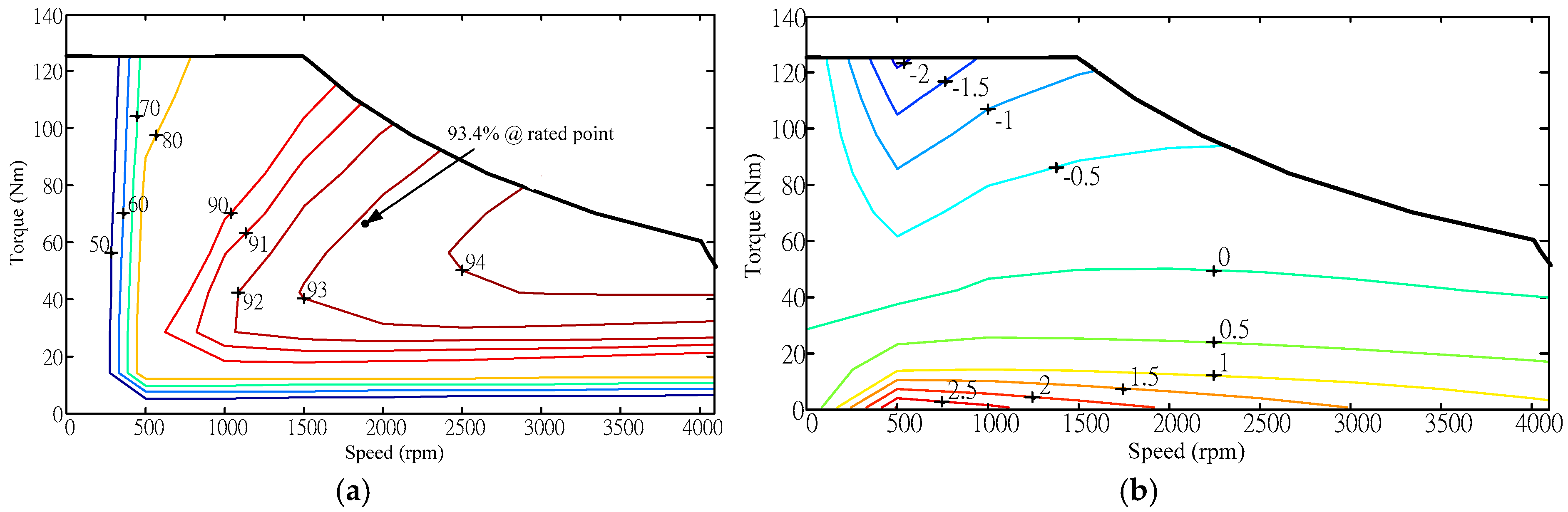
Figure 11a shows the efficiency map obtained from the FE method. At the rated point, the motor efficiency (93.40%) was found to be slightly higher than the motor efficiency (93.28%) obtained from the magnetic circuit model, as seen in the optimal Case 1 shown in
Table 4. The efficiency difference between the FE and magnetic circuit models is shown in
Figure 11b, and the difference is within the range of −2.5% to +3%. This difference is caused by overestimating the iron loss in the low torque region and underestimating the copper loss in the high torque region.
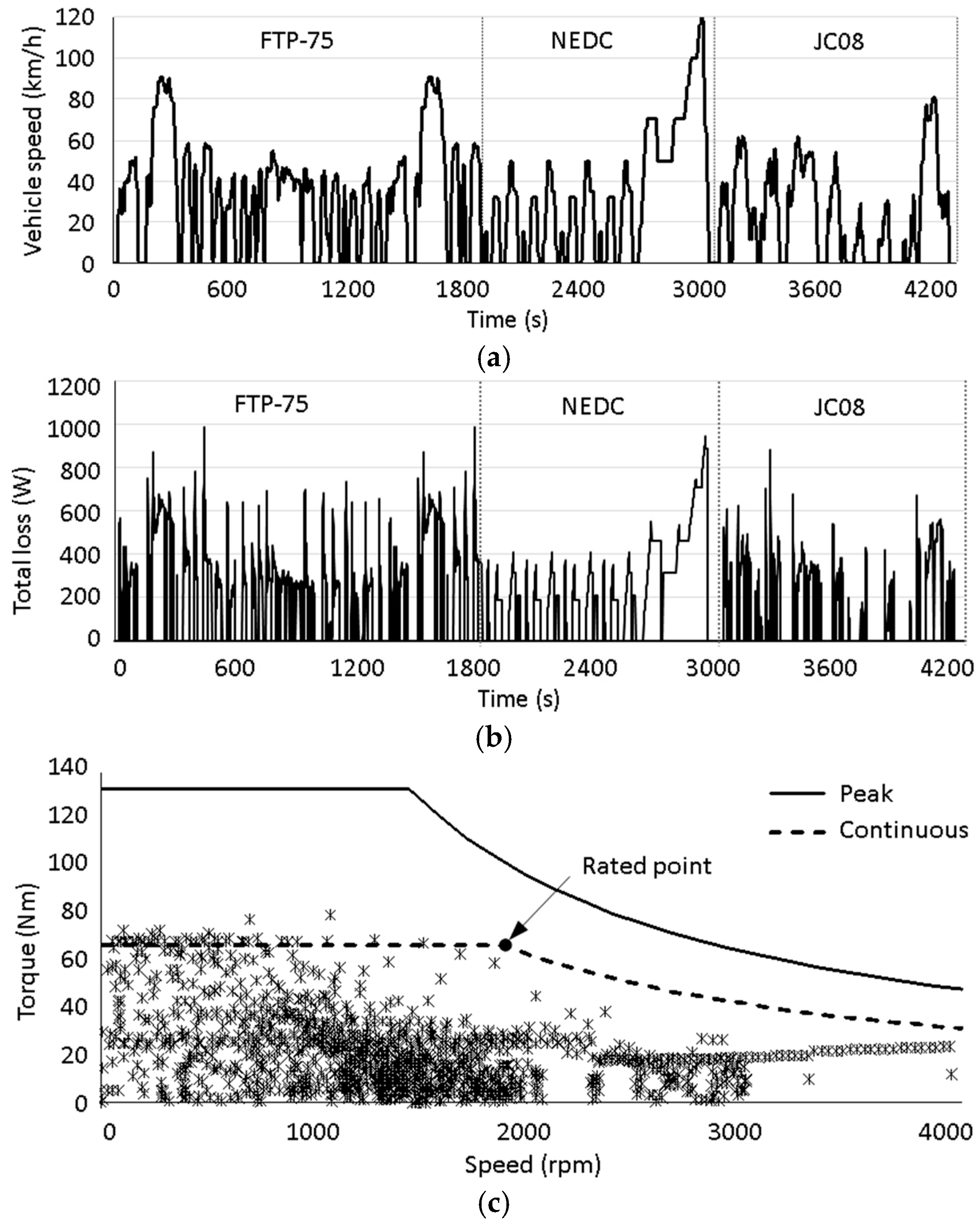
5.3. Energy Loss and Thermal Analysis
Table 6 shows a comparison of the ELs from the proposed AFPM motor when four of the motors drive the four-wheel-drive passenger car with three driving cycles (FTP-75, NEDC, and JC08). In the FE analysis, the sinusoidal current was supplied to the motor without considering the higher-order current harmonics produced by the inverter switching. As seen in
Table 6, the FE analysis resulted in higher copper loss, but lower iron loss, than the magnetic circuit model. The higher copper loss was caused by considering the temperature-dependent copper resistance. The lower iron loss was because the permeability of electrical steel was assumed to be much larger than the permeability of air, so the reluctance of steel was neglected in the magnetic circuit model. Thus, the magnetic flux density distribution in the air gap, the back EMF constant, and the torque are all larger than those obtained using FE analysis. Therefore, more current is required in the FE model to produce the same torque as found in the magnetic circuit model.
The rare-earth neodymium-iron-boron (NdFeB) magnet (magnetization grade N35SH) is used for the AFPM motor; its remanence is 1.14 T and the recoil permeability is 1.05 at 60 °C. The eddy-current loss in the magnet is relatively small, and it is about 3% of the total loss. In general, there is only about a 5%–7% difference in EL between the FE and magnetic circuit models.
During the operation of a motor, most EL is in the form of heat, which is dissipated through the water-cooling duct on each side of motor housing, as shown in
Figure 9a. The S-shaped water duct on the motor housing is designed with a contact surface of 0.0535 m
2, an average thermal resistance of 0.00411 °K/W, an average convective heat transfer coefficient of 4544 W/m
2 °K; the pressure drop between the water inlet and outlet is 40.53 kPa. The computational fluid dynamics (CFD) tool in the Solidworks Flow Simulation is used to design the cooling system by considering cooling efficiency, flow resistance, and fabrication cost.
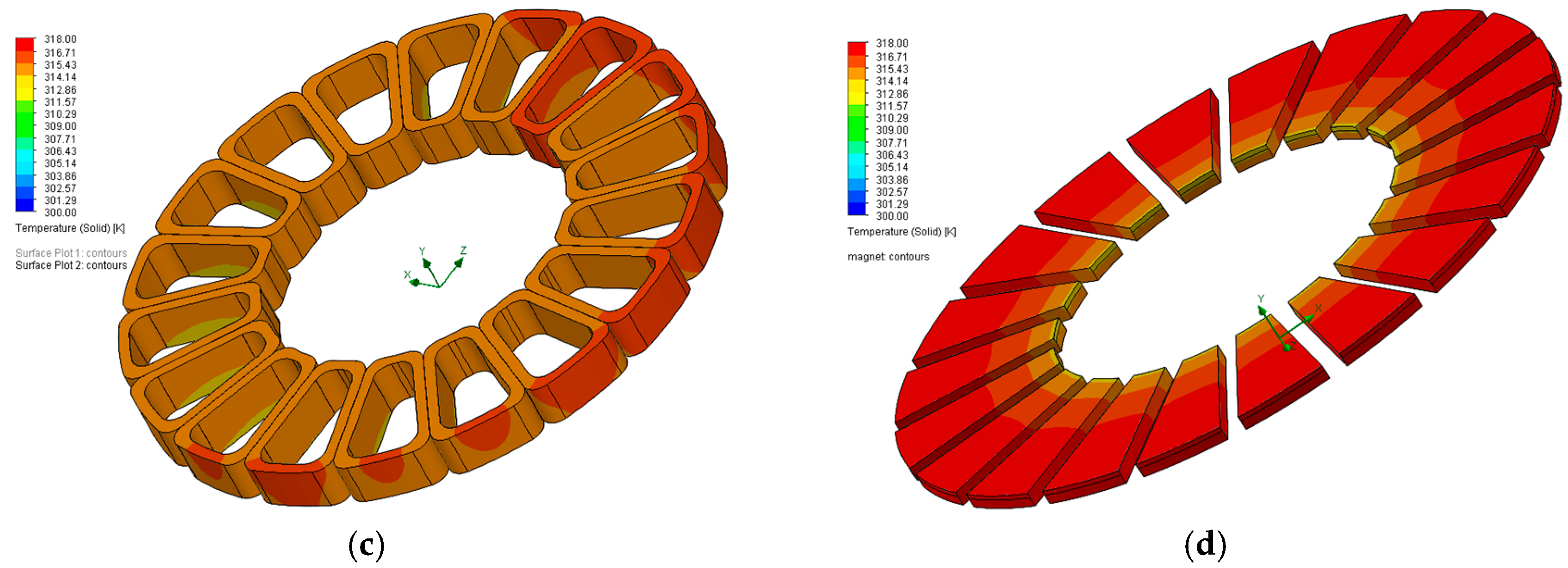
Figure 12 shows the transient response of the maximum and average temperatures of various locations in the motor. Initially, the motor was set at an ambient temperature of 27 °C. A continuous power of 14 kW was assumed for the vehicle running on a 15% slope at 60 km/h, so that the motor produced a constant torque of 64.3 Nm at a constant speed of 2091 rpm. The cooling water was fed into the motor housing at a flow rate of 12 L/min to dissipate 971-W power loss when the motor efficiency was about 93.5% at the operation point. The winding temperature increased rapidly from 27 °C to 40 °C in the first three minutes, and the steady-state temperature was 43 °C. The magnet temperature increased relatively more slowly than the winding temperature before it reached a steady-state temperature of 45°C near 24 minutes. The maximum stator temperature near the stator teeth was close to the winding temperature, but the average temperature of the stator in steady-state was low after being cooled by water.
5.4. Re-Examination of Driving Scenarios
This paper demonstrates a driving-scenario oriented design of an AFPM traction motor for EVs. The main purpose was to make the AFPM motor satisfy three driving scenarios without overdesign. Here, we re-examine the three driving scenarios: (1) the maximum slope that the vehicle can ride at a low speed is 35%; (2) the vehicle can provide maximum acceleration under 40 km/h; and (3) the maximum cruise speed on a road with a 5% slope is 120 km/h. The first requirement determined the maximum motor torque of 133.2 Nm. The third requirement determined the motor’s maximum speed ωmax, at which the torque Tc was much lower than the target torque of 47.58 Nm at the corner speed ωq1 (=ωc). Similarly, the continuous motor power, Pc = 13.4 kW, was set so that the vehicle was able to ride on a 5% slope at its maximum speed of 120 km/h. The continuous motor power was set about 66% of the maximum power of 20.4 kW.
In the thermal analysis, the vehicle was assumed to drive on a 15% slope at 60 km/h when a constant torque of 64.3 Nm was required. This torque is less than the continuous torque setting at 66.6 Nm, which was half of the maximum torque of 133.2 Nm. This confirms that the setting of the continuous motor torque to half of the maximum torque is satisfactory for the driving scenarios. However, when more rigorous driving conditions are required, a higher continuous torque must be set. For a commercial product, the continuous torque and power are usually set at higher than half of their maximum values.
6. Conclusions
This paper proposed a systematic, driving-scenario oriented, multi-objective optimal design process of an AFPM motor for a four-wheel-drive EV. The driving scenario, the modulation method of the motor drive, and basic torque and voltage equations of the motor were used to provide basic information for building a range of target TN curves for three operation zones—constant torque, maximum DC current, and maximum voltage. Thus, the back EMF constant, phase inductance, and phase resistance were used to size and optimize the proposed motor using a quasi-3D magnetic circuit model. The systematic optimal design process for a preliminary motor design was fast and accurate, as verified through FE analysis. First, the resulting TN curve was found to match well with the target TN curve. The corresponding efficiency maps of the FE and magnetic circuit methods were also found to be similar, with a difference of less than 3%. Second, the energy consumption of the proposed motor was 15% less than the energy consumption of the motor designed using a traditional method, which optimized the motor efficiency only at its rated operation point. Finally, the water-cooling duct was designed so that the motor dissipated EL during the operation. Moreover, the temperature response and steady-state temperature distributions were investigated, and it was proven that the proposed motor can be operated safely for a continuous driving mode.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}