
Extracting Steady State Components from Synchrophasor Data Using Kalman Filters


Abstract
:
1. Introduction
1.1. Motivation
1.2. Literature Review
1.3. Paper Contributions
2. PMU Data Processing
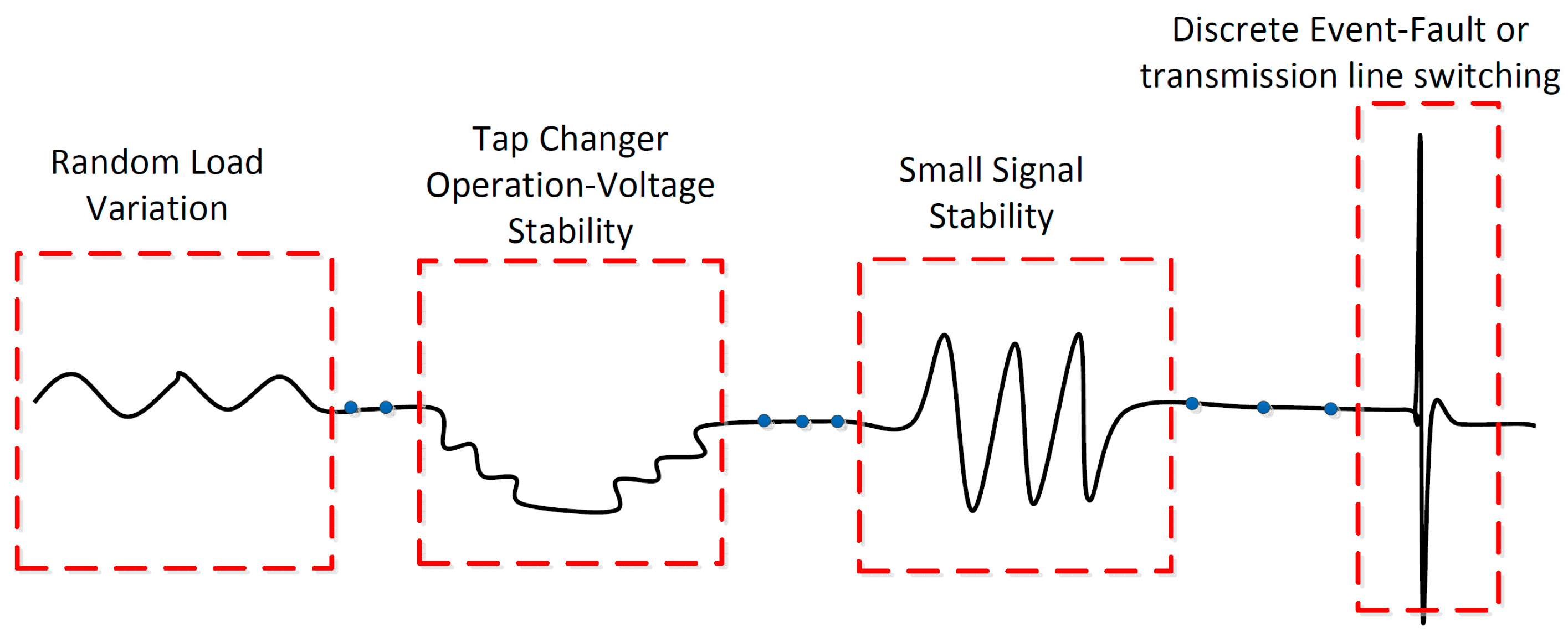
2.1. Extraction of Specific Signal Features
- Discrete Events (e.g., transmission line switching, transient stability) ~ milliseconds
- Small signal stability ~ seconds
- Tap changer operation (voltage stability) ~ minutes
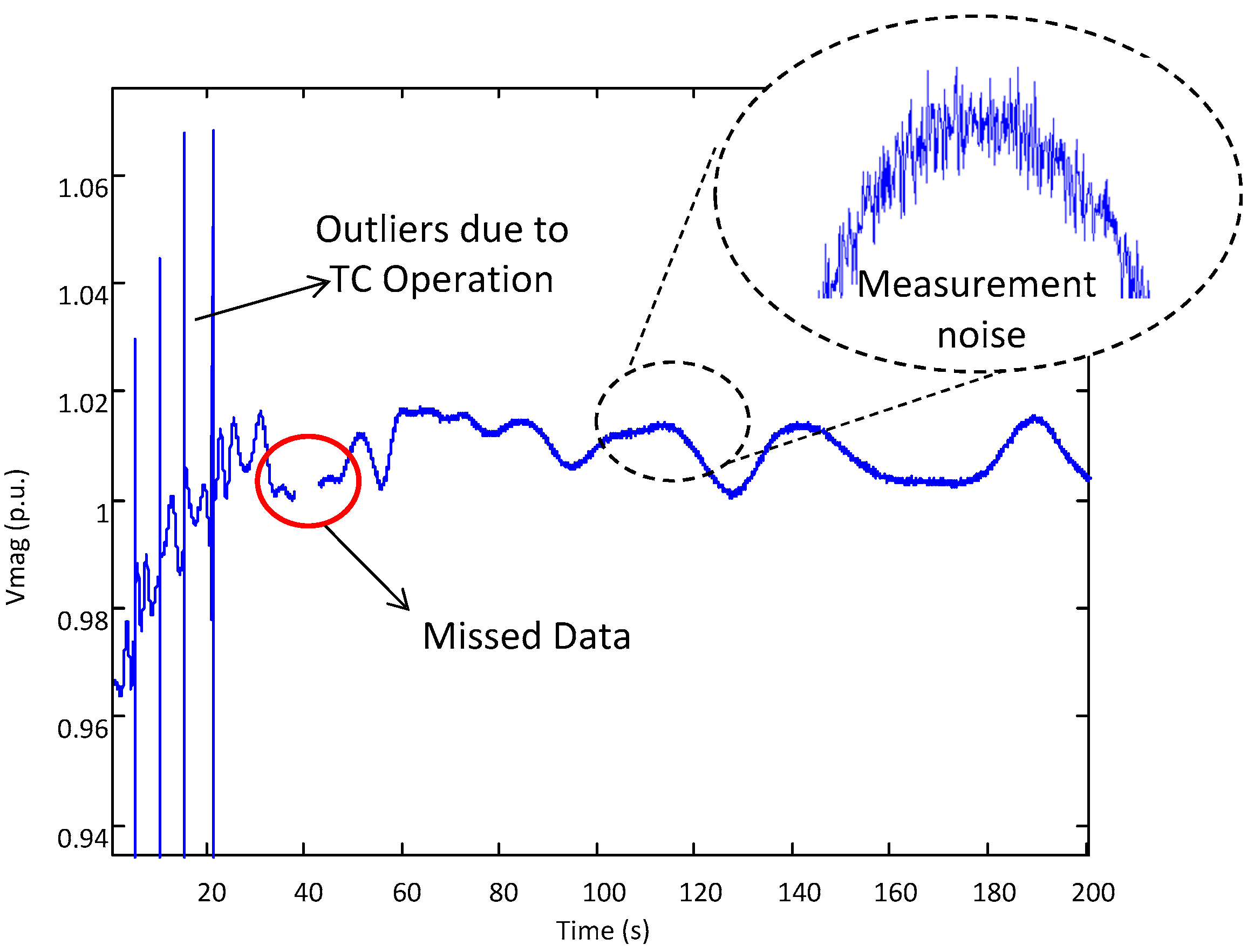
2.2. Bad Data in PMU Measurements
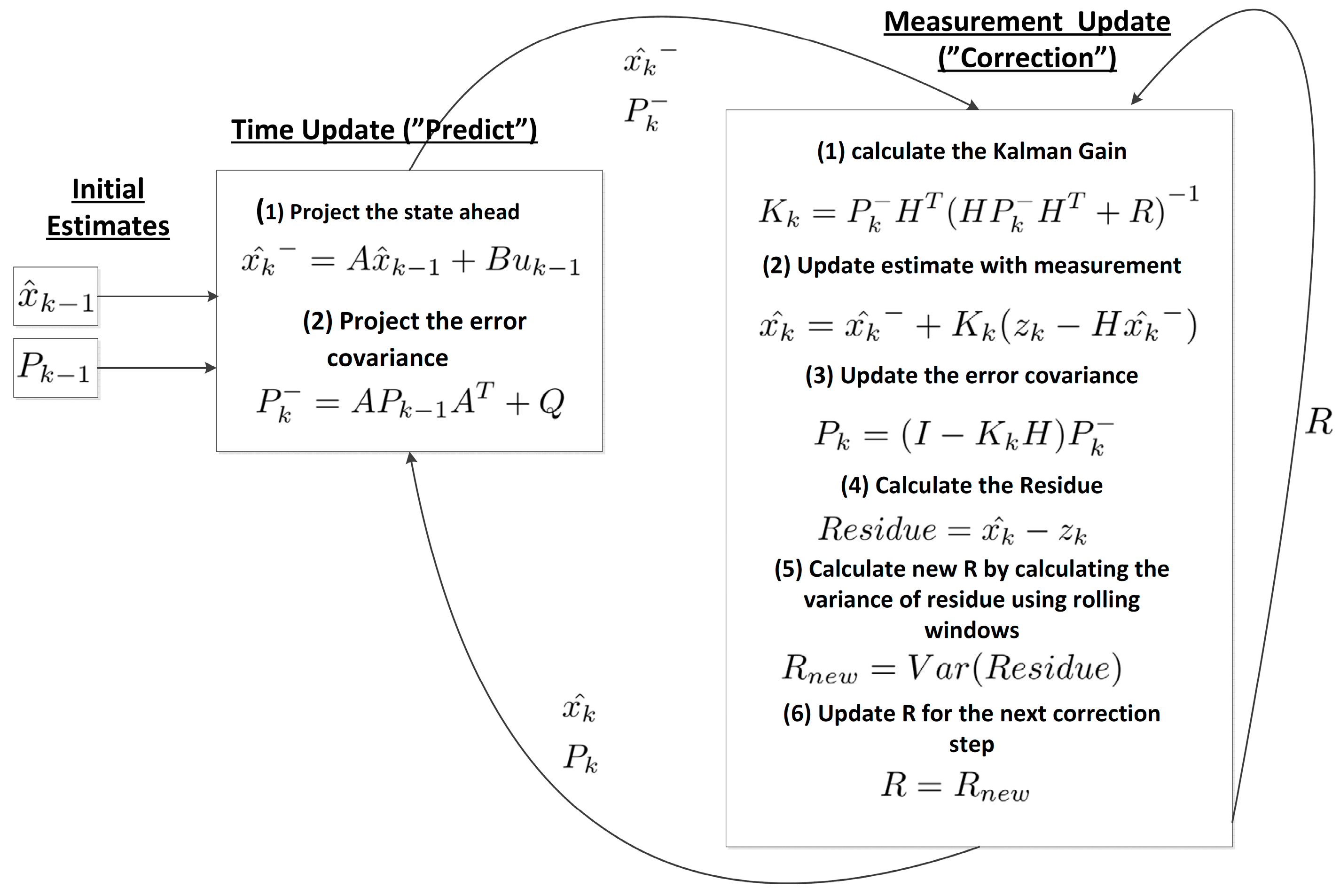
3. Traditional Kalman Filter
4. Proposed Kalman Filter Methods
4.1. KF Method Based on Windowing
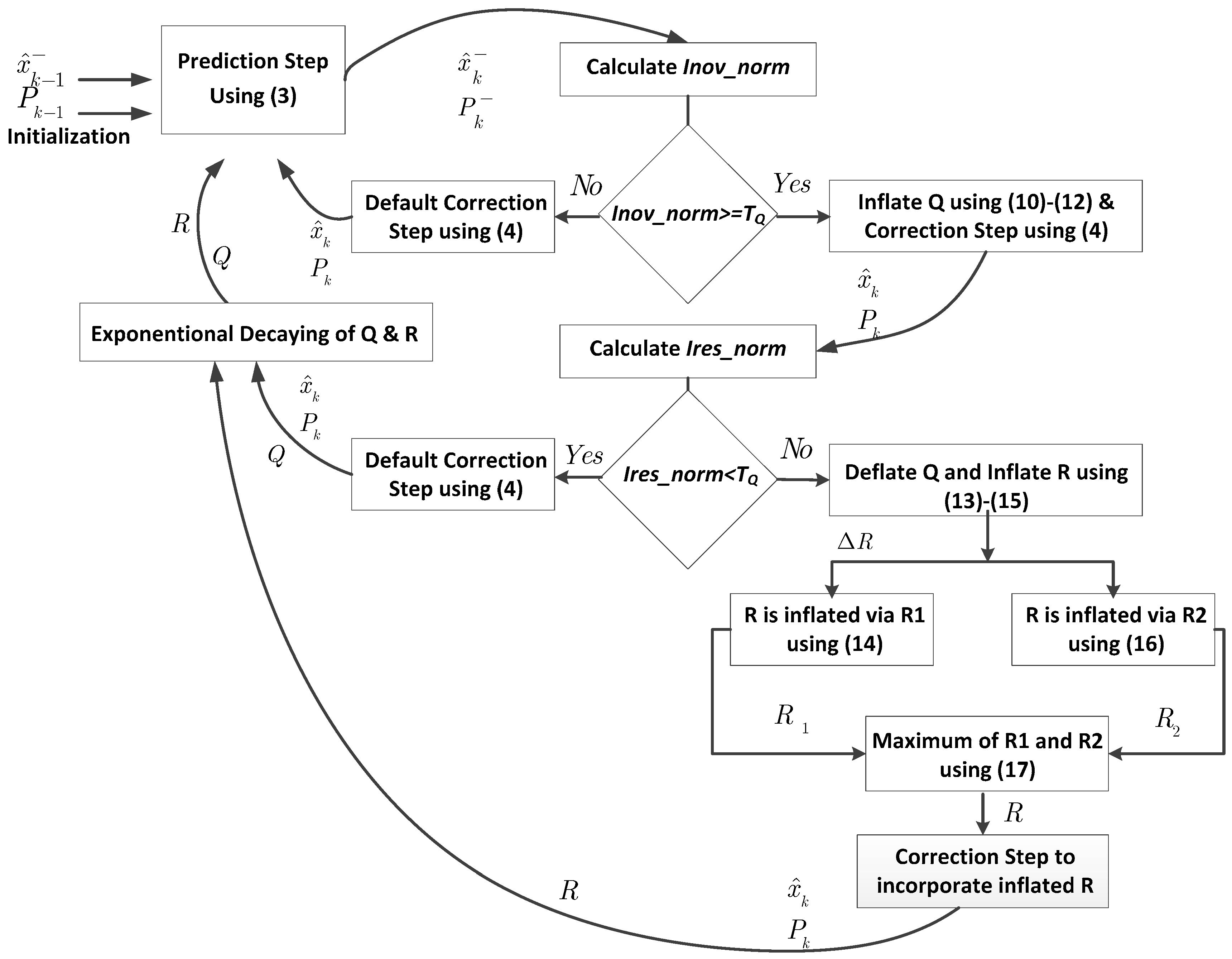
4.2. The Modified KF Method
- Start the prediction step. Afterwards, calculate Inov-norm. If Inov-norm ≥ tQ, it indicates that there exists either process noise or bad data in the measurements that has caused Inov-norm to exceed τQ. Assume that the problem is originating from the process noise, so reduce Inov-norm back to τQ through inflating Q by ΔQ, as shown in Equations (13)–(15).
- In this step, calculate Ires-norm considering the inflated Q. If Ires-norm < tR, it means that the assumption in step 2 is correct, otherwise it indicates that the problem is caused by the bad data in the measurements. So this requires to deflate Q back to its original value and instead, inflate R such that Inov-norm and Ires-norm are reduced back to τQ (through Equations (16) and (17)) and τR (through Equations (18) and (19)), respectively. Note that as Equation (19) is a nonlinear equation, it must be solved numerically, e.g., R2 can be increased iteratively starting from R until R2(cte+R2)–1 ≥ T2. Finally note that, as shown in Equation (20), the inflated R is equal to the maximum of R1 and R2.
- The correction step is performed using the inflated Q or R. If neither Q nor R is inflated, the method uses the original Q and R.
- The inflated Q or R is deflated using an exponential decaying factor in the beginning of the next execution to treat temporary problems, e.g., outliers, etc.
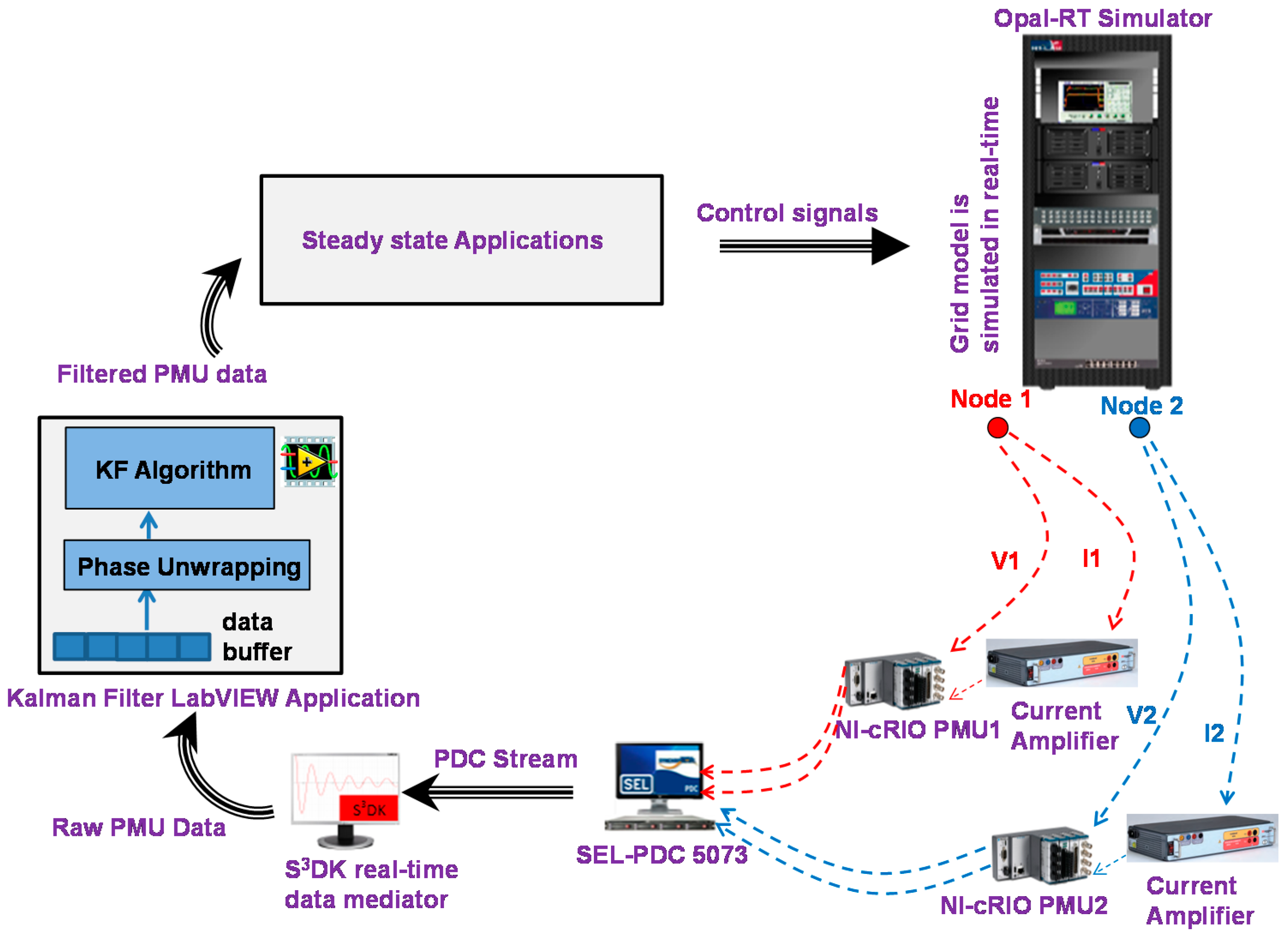
5. Experimental Setup
6. Case Studies
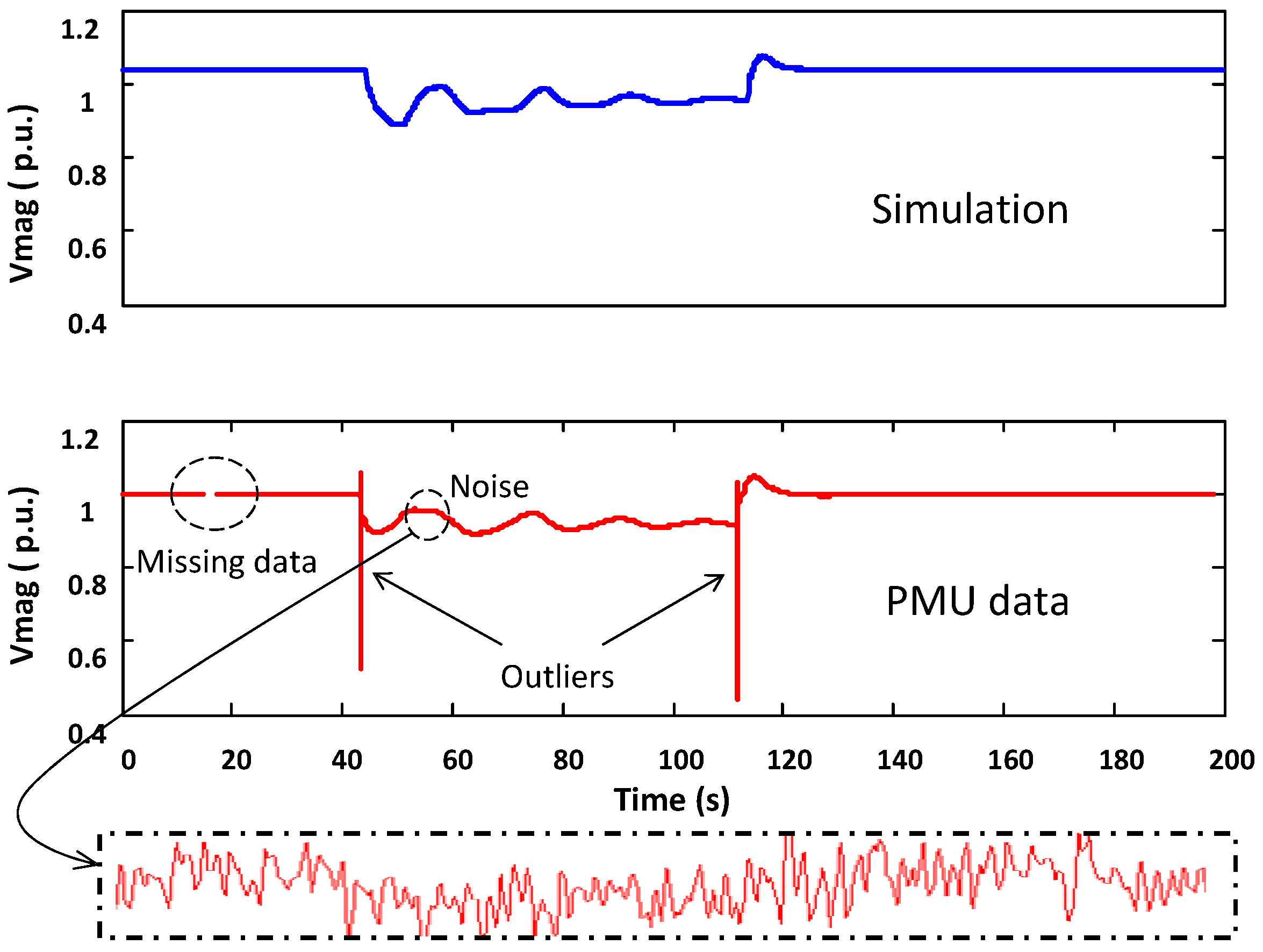
6.1. Difference Between Simulated Data and PMU Data
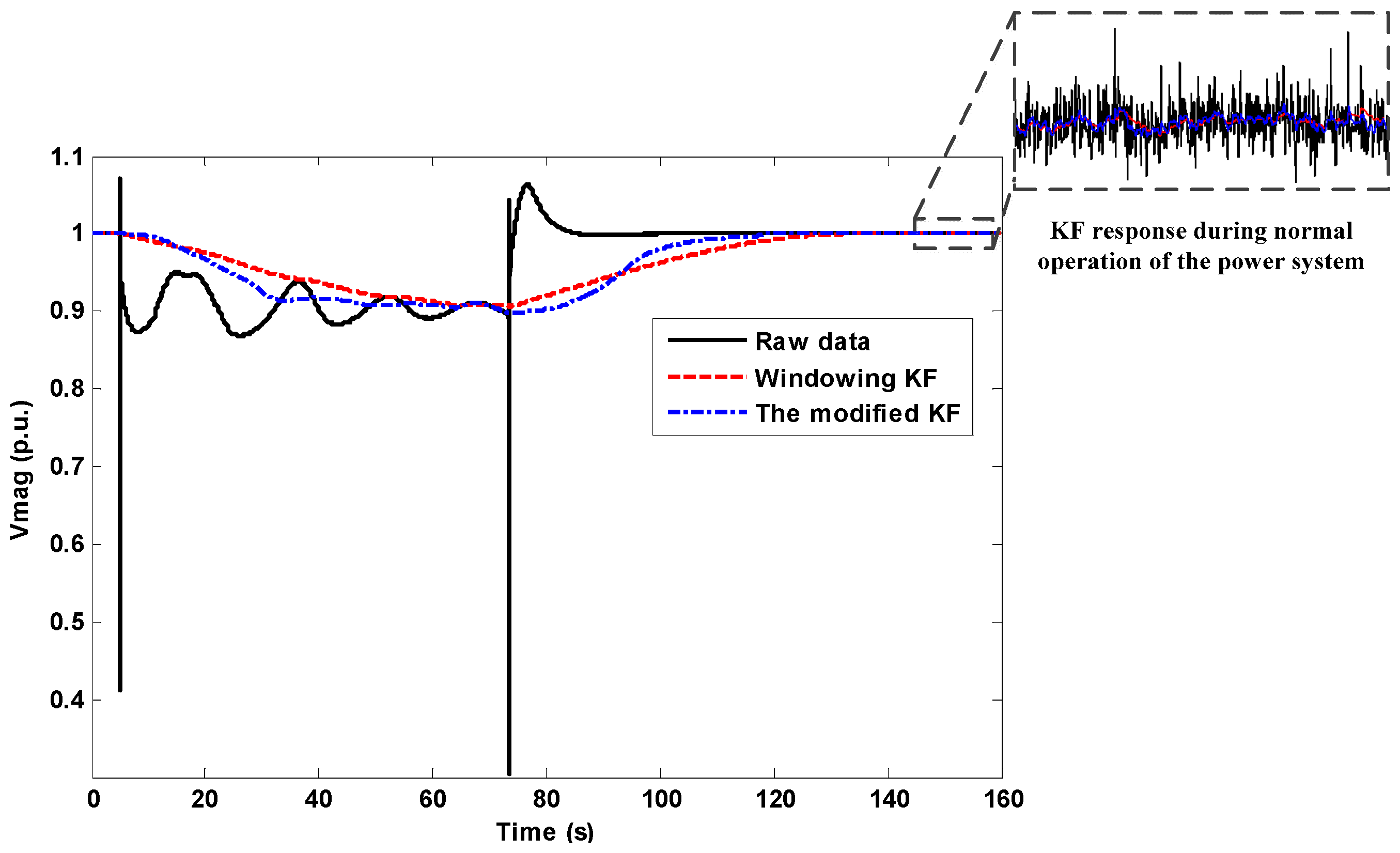
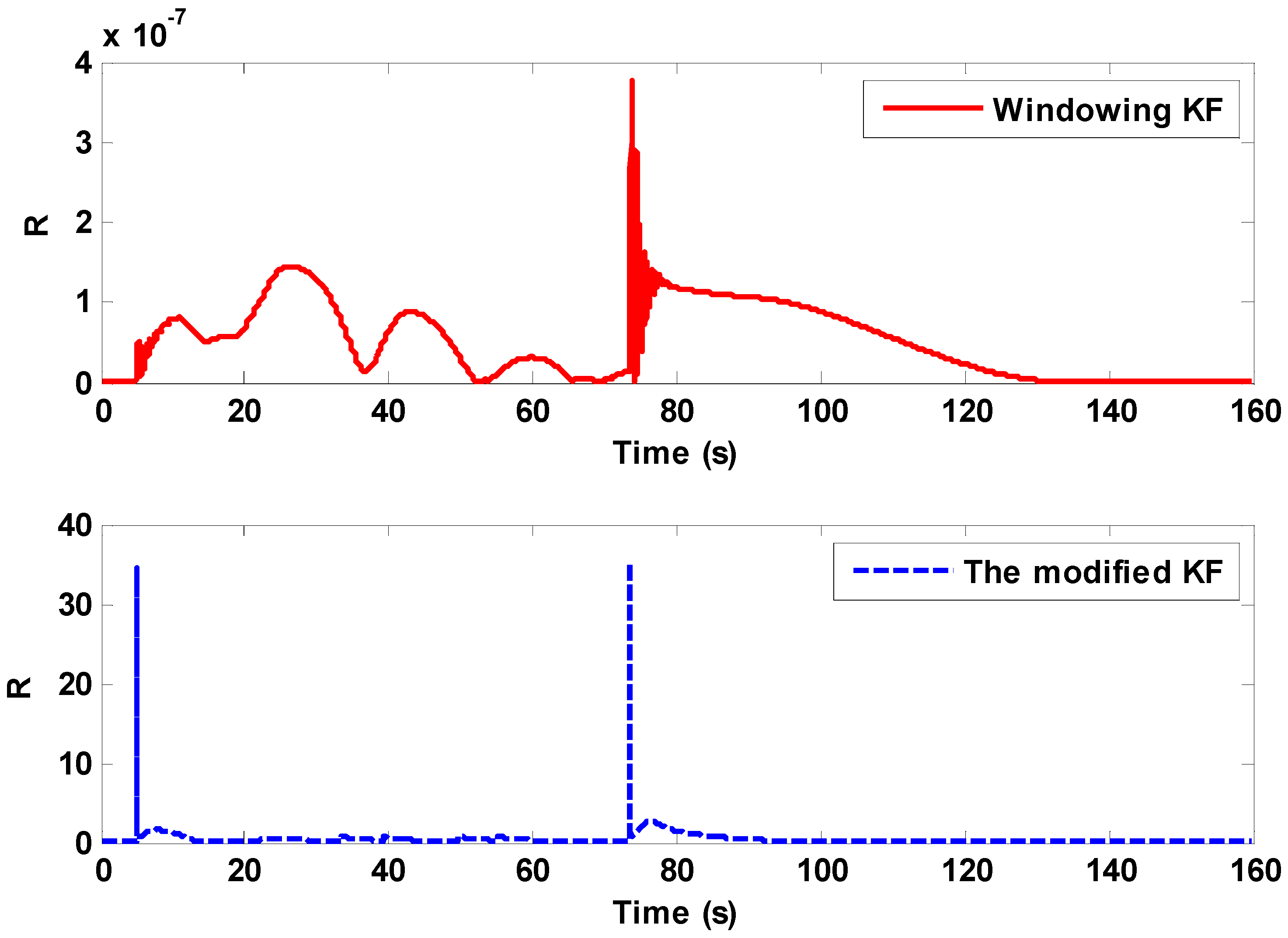
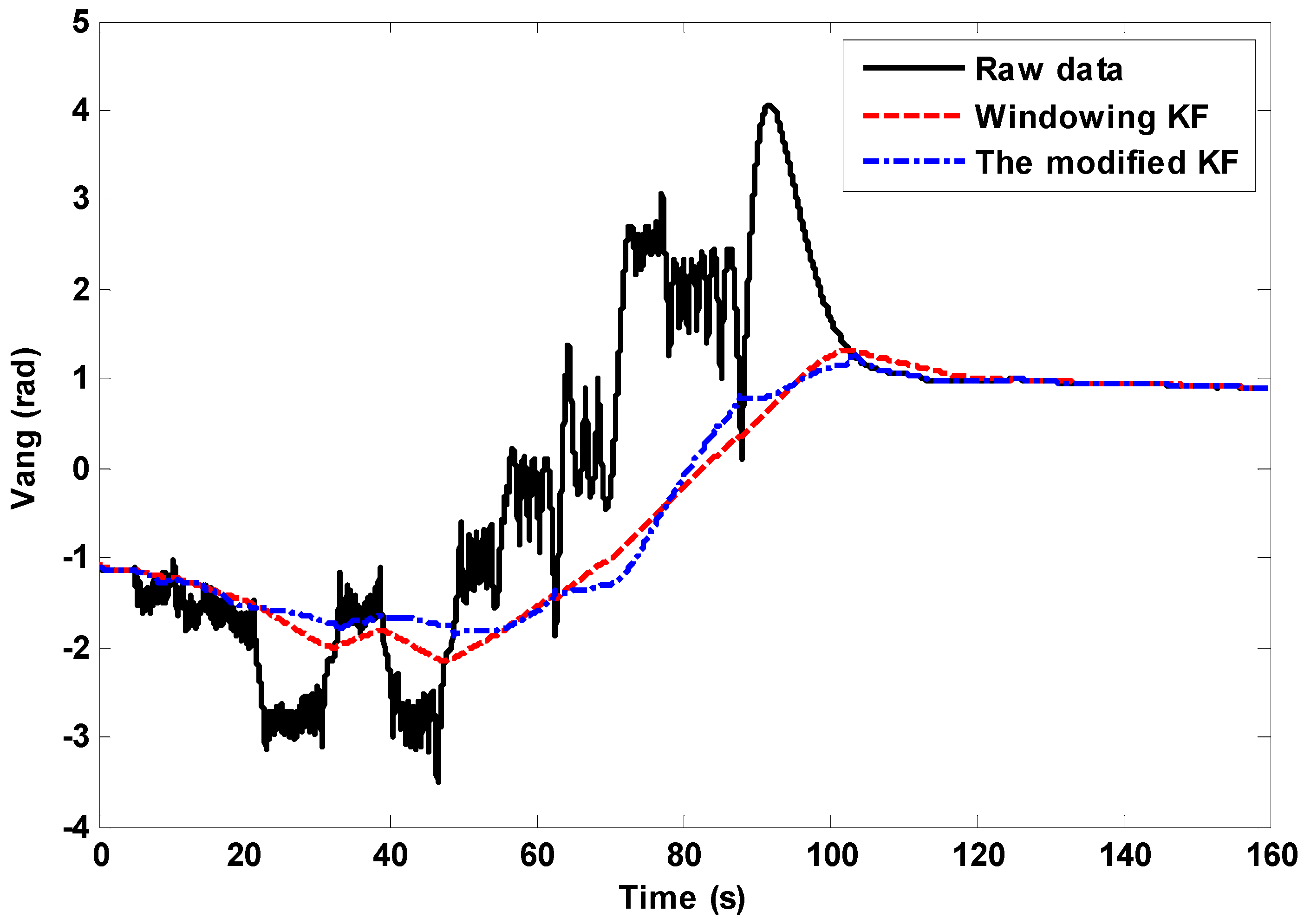
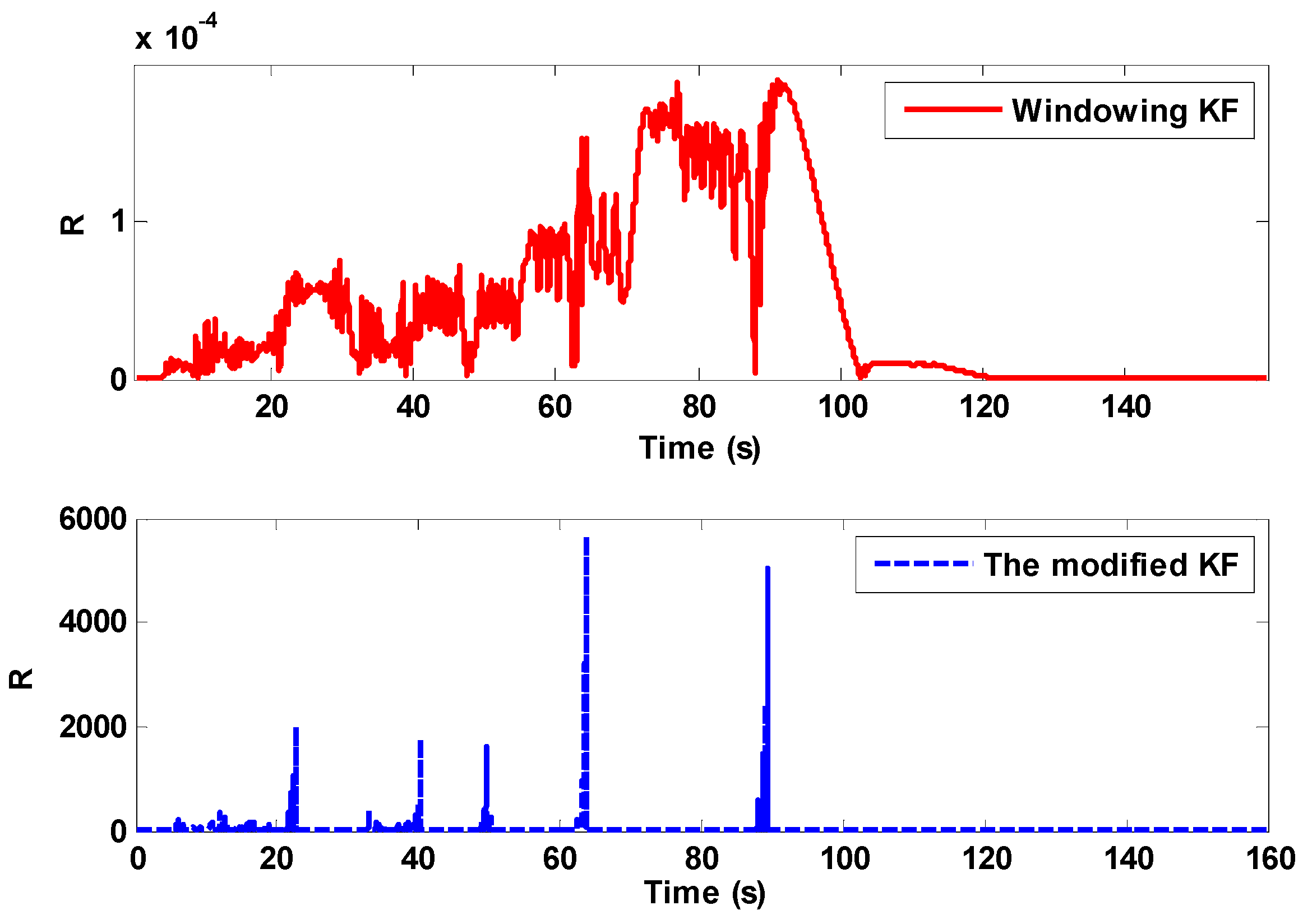
6.2. Kalman Filter Performance Comparison of Two Proposed Methods
6.3. Performance Analysis
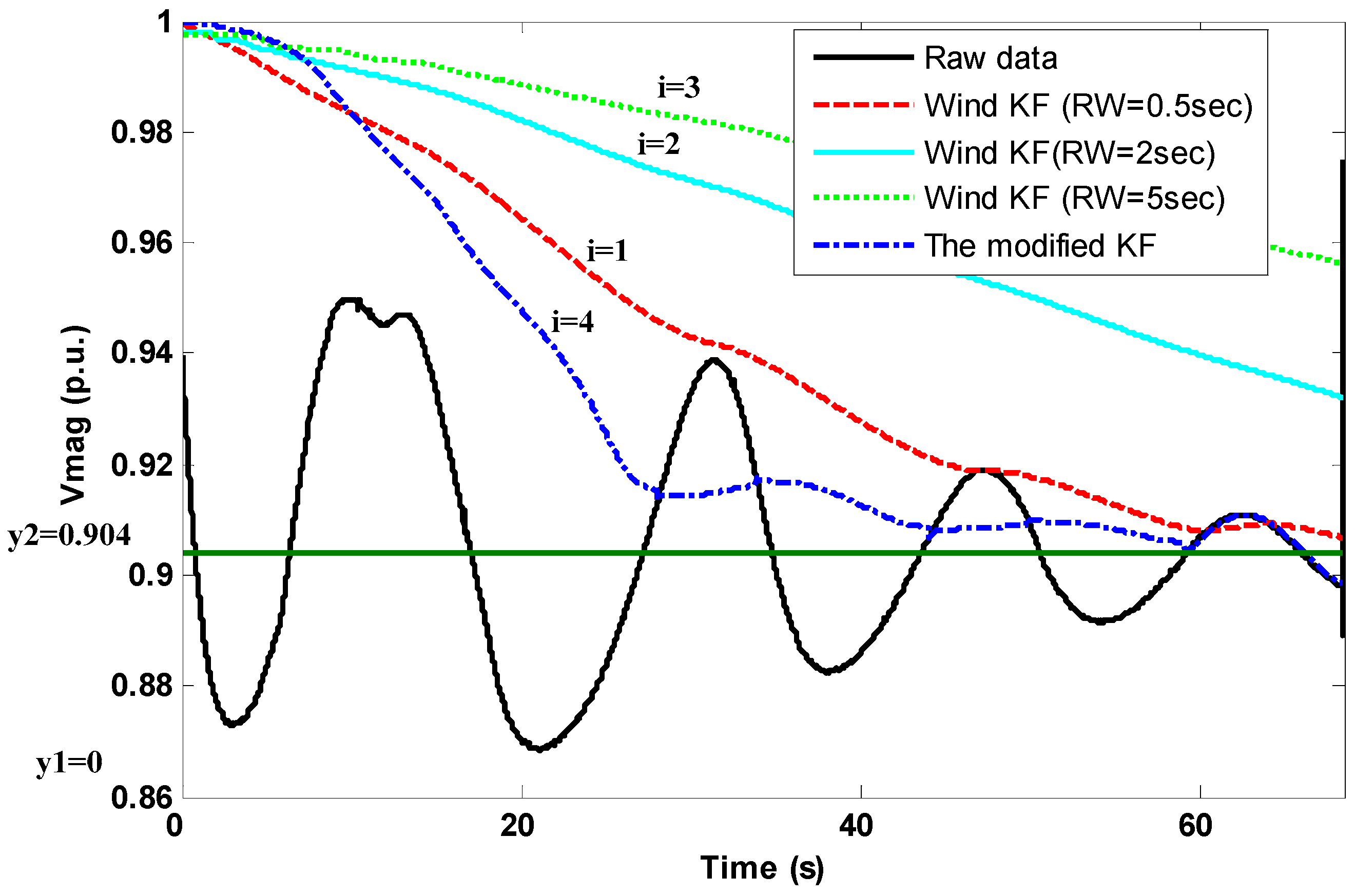
6.3.1. Impact of Varying Rolling Window Length on Smoothing
6.3.2. Performance Analysis Using an Evaluation Metric
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| KF | Kalman Filters |
| HIL | Hardware-in-the-Loop |
| CRIO | Compact Reconfigurable Input Output |
| RLV | Random Load Variations |
References
- IDE4L. Ideal Grid for All. Available online: http://www.ide4l.eu/ (accessed on 8 December 2015).
- Institute of Electrical and Electronics Engineers (IEEE). IEEE Standard for Syncrophasor Measurements for Power Systems; IEEE Std C37.118.1-2011; IEEE: New York, NY, USA, 2006. [Google Scholar]
- Almas, M.; Kilter, J.; Vanfretti, L. Experiences with steady-state PMU compliance testing using standard relay testing equipment. In Proceedings of the Electric Power Quality and Supply Reliability Conference (PQ) 2014, Rakvere, Estonia, 11–13 June 2014; IEEE: New York, NY, USA; pp. 103–110.
- Zhang, Q.; Luo, X.; Bertagnolli, D.; Maslennikov, S.; Nubile, B. PMU data validation at ISO New England. In Proceedings of the Power and Energy Society General Meeting (PES), Vancouver, BC, Canada, 21–25 July 2013; IEEE: New York, NY, USA, 2013; pp. 1–5. [Google Scholar]
- Shi, D.; Tylavsky, D.; Logic, N. An adaptive method for detection and correction of errors in PMU measurements. In Proceedings of the Power and Energy Society General Meeting (PES), Vancouver, BC, Canada, 21–25 July 2013; IEEE: New York, NY, USA, 2013; p. 1. [Google Scholar]
- Zhang, Q.F.; Venkatasubramanian, V.M. Synchrophasor time skew: Formulation, detection and correction. In Proceedings of the North American Power Symposium (NAPS), Pullman, WA, USA, 7–9 September 2014; pp. 1–6.
- Tate, J.; Overbye, T. Extracting steady state values from phasor measurement unit data using FIR and median filters. In Proceedings of the IEEE PES Power Systems Conference and Exposition, Seattle, WA, USA, 2009.
- Jones, K.D.; Pal, A.; Thorp, J.S. Methodology for performing synchrophasor data conditioning and validation. In IEEE Transactions on Power Systems; IEEE: New York, NY, USA, 2015; Volume 30, pp. 1121–1130. [Google Scholar]
- Zanni, L.; Sarri, S.; Pignati, M.; Cherkaoui, R.; Paolone, M. Prob-abilistic assessment of the process-noise covariance matrix of discrete kalman filter state estimation of active distribution networks. In Proceedings of the Inter-national Conference on Probabilistic Methods Applied to Power Systems (PMAPS), Durham, UK, 7–10 July 2014.
- Zhang, J.; Welch, G.; Bishop, G.; Huang, Z. A two-stage kalman filter approach for robust and real-time power system state estimation. IEEE Trans. Sustain. Energy 2014, 5, 629–636. [Google Scholar] [CrossRef]
- Sarri, S.; Paolone, M.; Cherkaoui, R.; Borghetti, A.; Napolitano, F.; Nucci, C.A. State estimation of Active Distribution Networks: Comparison between WLS and iterated kalman-filter algorithm integrating PMUs. In Proceedings of the 2012 3rd IEEE PES International Conference and Exhibition on Innovative Smart Grid Technologies (ISGT Europe), Berlin, Germany, 14–17 October 2012; pp. 1–8.
- Ghahremani, E.; Kamwa, I. Simultaneous state and input estimation of a synchronous machine using the Extended Kalman Filter with unknown inputs. In Proceedings of the 2011 IEEE International Electric Machines & Drives Conference (IEMDC), Niagara Falls, ON, Canada, 15–18 May 2011; pp. 1468–1473.
- Ghahremani, E.; Kamwa, I. PMU analytics for decentralized dynamic state estimation of power systems using the extended kalman filter with unknown inputs. In Proceedings of the 2015 IEEE Power & Energy Society General Meeting, Denver, CO, USA, 26–30 July 2015; pp. 1–5.
- Ghahremani, E.; Kamwa, I.; Li, W.; Grégoire, L.A. Synchrophasor based tracking of synchronous generator dynamic states using a fast EKF with unknown mechanical torque and field voltage. In Proceedings of the Industrial Electronics Society, IEEE International Conference on Industrial Electronics, Control, and Instrumentation (IECON) 2014—40th Annual Conference of the IEEE, Dallas, TX, USA, 29 October–1 November 2014; pp. 302–308.
- Giri, J.; Sun, D.; Avila-Rosales, R. Wanted: A more intelligent grid. Power Energy Mag. 2009, 7, 34–40. [Google Scholar] [CrossRef]
- Hongrae, K.; Abur, A. Enhancement of external system modeling for state estimation. IEEE Trans. Power Syst. 1996, 11, 1380–1386. [Google Scholar] [CrossRef]
- Mahmood, F.; Hooshyar, H.; Vanfretti, L. A method for extracting steady state components from Syncrophasor data using Kalman Filters. In Proceedings of the IEEE 15th International Conference on Environment and Electrical Engineering (EEEIC), Rome, Italy, 10–13 June 2015; pp. 1498–1503.
- Vanfretti, L.; Chow, J.; Sarawgi, S.; Fardanesh, B. Phasor data- based state estimator incorporating phase bias correction. IEEE Trans. Power Syst. 2011, 26, 111–119. [Google Scholar] [CrossRef]
- Hooshyar, H.; Mahmood, F.; Vanfretti, L.; Baudette, M. Specification, implementation, and hardware-in-the-loop real-time simulation of an active distribution grid. Sustain. Energy Grids Netw. 2015, 3, 36–51. [Google Scholar] [CrossRef]
- The Opal-RT Technologies, Inc. OP5600 Hardware-in-the-Loop (HIL) Simulator Description. Available online: http://www.opal-rt.com/product/op5600-hil-hardware-in-the-loop-computer-and-IO-system? quicktabs 3=7#quicktabs-3 (accessed on 6 January 2016).
- National Instruments. NI cRIO-9074 Description. Available online: http://sine.ni.com/nips/cds/view/p/lang/en/nid/203964 (accessed on 6 January 2016).
- Romano, P.; Paolone, M. Enhanced Interpolated-DFT for Synchrophasor Estimation in FPGAs: Theory, Implementation, and Validation of a PMU Prototype. IEEE Trans. Instrum. Meas. 2014, 63, 2824–2836. [Google Scholar] [CrossRef]
- Megger. Single Phase Relay Tester (SMRT1) Description. Available online: http://www.megger.com/us/products/ProductDetails.php?ID= 1529 (accessed on 6 January 2016).
- Vanfretti, L.; Aarstrand, V.H.; Almas, M.S.; Peric, V.S.; Gjerde, J.O. A software development toolkit for real-time synchrophasor applications. In Proceedings of the IEEE Power Tech, Grenoble, France, 16–20 June 2013.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Area | A/K |
|---|---|---|
| Windowing KF (RW = 0.5 s) | 134.93 | 0.45 |
| Windowing KF (RW = 2 s) | 214 | 0.71 |
| Windowing KF (RW = 5 s) | 256.14 | 0.85 |
| The Modified KF | 99.95 | 0.33 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mahmood, F.; Hooshyar, H.; Vanfretti, L. Extracting Steady State Components from Synchrophasor Data Using Kalman Filters. Energies 2016, 9, 315. https://doi.org/10.3390/en9050315
Mahmood F, Hooshyar H, Vanfretti L. Extracting Steady State Components from Synchrophasor Data Using Kalman Filters. Energies. 2016; 9(5):315. https://doi.org/10.3390/en9050315
Chicago/Turabian StyleMahmood, Farhan, Hossein Hooshyar, and Luigi Vanfretti. 2016. "Extracting Steady State Components from Synchrophasor Data Using Kalman Filters" Energies 9, no. 5: 315. https://doi.org/10.3390/en9050315
APA StyleMahmood, F., Hooshyar, H., & Vanfretti, L. (2016). Extracting Steady State Components from Synchrophasor Data Using Kalman Filters. Energies, 9(5), 315. https://doi.org/10.3390/en9050315