Strain Localization of Elastic-Damaging Frictional-Cohesive Materials: Analytical Results and Numerical Verification



Abstract
:1. Introduction
2. Strain Localization in Damaging Solids
2.1. Continuum Damage Models
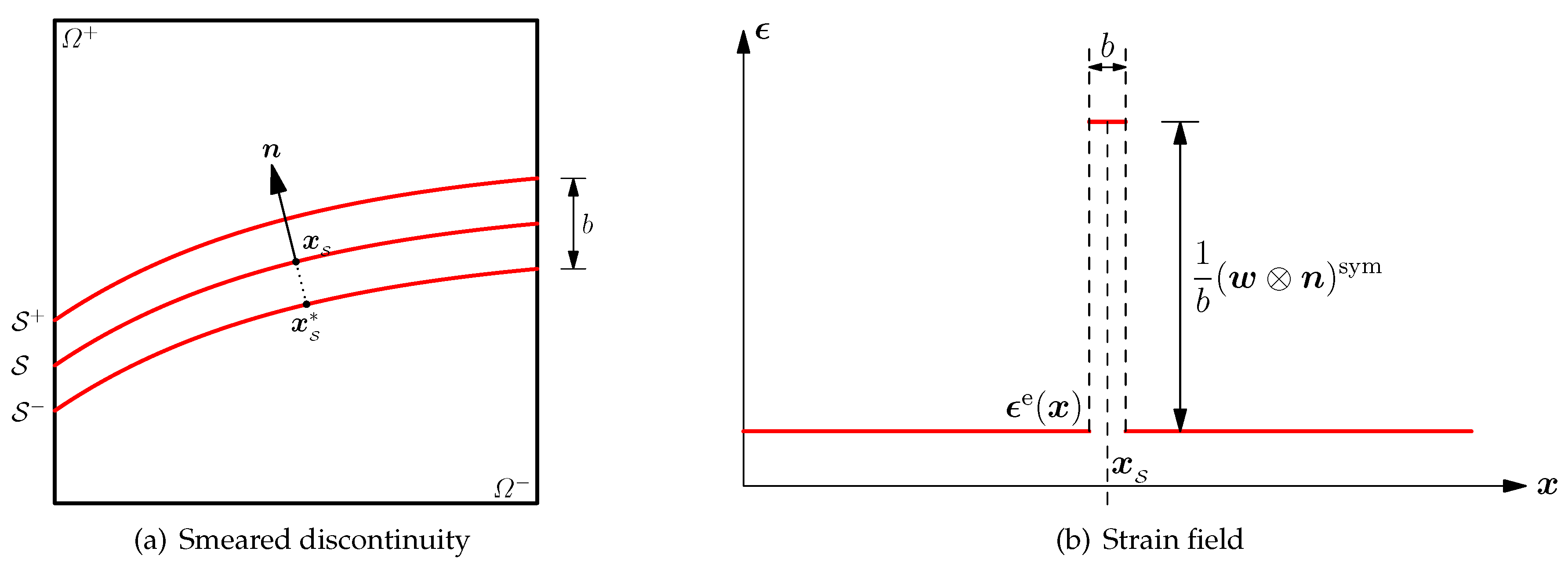
2.2. Strain Localization and Localized Damage Models
3. Closed-Form Results
3.1. Damage Model
3.1.1. Constitutive Relations
3.1.2. Orientation of the Discontinuity
3.1.3. Localized Damage Model
3.2. Simó and Ju [41] Damage Model
3.2.1. Constitutive Relations
3.2.2. Orientation of the Discontinuity
3.2.3. Localized Damage Model
3.3. Modified Damage Model
3.3.1. Constitutive Relations
3.3.2. Orientation of the Discontinuity
3.3.3. Localized Damage Model
4. Numerical Verification
4.1. Mixed Stabilized Strain/Displacement Element
4.2. Numerical Results
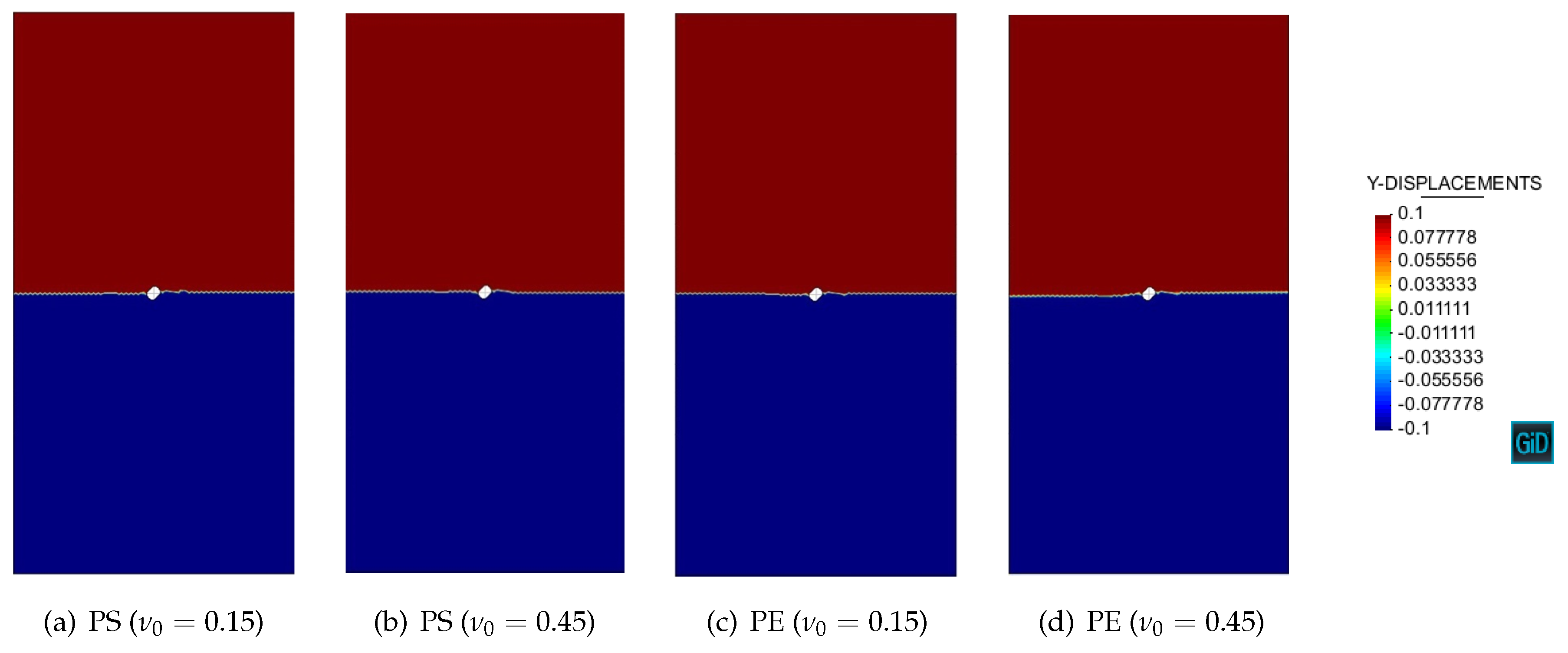
4.2.1. Simó and Ju [41] Damage Model
4.2.2. Modified Simó and Ju Damage Model
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A. Modified Damage Model: Compliance and Stiffness Matrices
Appendix B. Smeared Crack Model: Compliance and Stiffness Matrices

References
- Chen, W.F. Constitutive Equations for Engineering Materials: Plasticity and Modeling; Elsevier: Amsterdam, The Netherlands, 1994; Volume 2. [Google Scholar]
- Krajcinovic, D. Damage Mechanics; Elsevier B.V.: Amsterdam, The Netherlands, 2003. [Google Scholar]
- Armero, F.; Oller, S. A general framework for continuum damage models. I: Infinitesimal plastic damage models in stress space. Int. J. Solids Struct. 2000, 37, 7409–7464. [Google Scholar] [CrossRef]
- Meschke, G.; Lackner, R.; Mang, H.A. An anisotropic elastoplastic damage model for plain concrete. Int. J. Numer. Meth. Eng. 1998, 42, 703–727. [Google Scholar] [CrossRef]
- Wu, J.Y.; Li, J.; Faria, R. An energy release rate-based plastic-damage model for concrete. Int. J. Solids Struct. 2006, 43, 583–612. [Google Scholar] [CrossRef]
- Carol, I.; Prat, P.; López, C. Normal/shear cracking model: Application to discrete crack analysis. J. Eng. Mech. ASCE 1997, 123, 765–773. [Google Scholar] [CrossRef]
- Camacho, G.T.; Ortiz, M. Computational modeling of impact damage in brittle materials. Int. J. Solids Struct. 1996, 33, 2899–2938. [Google Scholar] [CrossRef]
- Armero, F. Large-scale modeling of localized dissipative mechanisms in a local continuum: Applications to the numerical simulation of strain localization in rate-dependent inelastic solids. Mech. Cohes. Frict. Mater. 1999, 4, 101–131. [Google Scholar] [CrossRef]
- Jirásek, M.; Zimmermann, T. Embedded crack model. Part II: Combination with smeared cracks. Int. J. Numer. Methods Eng. 2001, 50, 1291–1305. [Google Scholar] [CrossRef]
- Wu, J.Y. Unified analysis of enriched finite elements for modeling cohesive cracks. Comput. Methods Appl. Mech. Engrg. 2011, 200, 3031–3050. [Google Scholar] [CrossRef]
- Wu, J.Y.; Xu, S.L. An augmented multicrack elastoplastic damage model for tensile cracking. Int. J. Solids Struct. 2011, 48, 2511–2528. [Google Scholar] [CrossRef]
- Bažant, Z.P.; Oh, B.H. Crack band theory for fracture of concrete. Mater. Struct. (RILEM, Paris) 1983, 16, 155–177. [Google Scholar] [CrossRef]
- Hillerborg, A.; Modeer, M.; Petersson, P.E. Analysis of crack formation and crack growth in concrete by means of fracture mechanics and finite elements. Cem. Concr. Res. 1976, 6, 773–782. [Google Scholar] [CrossRef]
- Cervera, M.; Wu, J.Y. On the conformity of strong, regularized, embedded and smeared discontinuity approaches for the modeling of localized failure in solids. Int. J. Solids Struct. 2015, 71, 19–38. [Google Scholar] [CrossRef]
- Wu, J.Y.; Cervera, M. On the equivalence between traction- and stress-based approaches for the modeling of localized failure in solids. J. Mech. Phys. Solids 2015, 82, 137–163. [Google Scholar] [CrossRef]
- Wu, J.Y.; Li, F.B. An improved stable XFEM (Is-XFEM) with a novel enrichment function for the computational modeling of cohesive cracks. Comput. Methods Appl. Mech. Eng. 2015, 295, 77–107. [Google Scholar] [CrossRef]
- Wu, J.Y.; Li, F.B.; Xu, S.L. Extended embedded finite elements with continuous displacement jumps for the modeling of localized failure in solids. Comput. Methods Appl. Mech. Eng. 2015, 285, 346–378. [Google Scholar] [CrossRef]
- Oliver, J. Modeling strong discontinuities in solid mechanics via strain softening contitutive equations. Part I: Fundaments & Part II: Numerical simulation. Int. J. Numer. Meth. Eng. 1996, 39, 3575–3623. [Google Scholar]
- Simó, J.C.; Oliver, J.; Armero, F. An analysis of strong discontinuities induced by strain-softening in rate-independent inelastic solids. Comput. Mech. 1993, 12, 277–296. [Google Scholar] [CrossRef]
- Oliver, J.; Cervera, M.; Manzoli, O. On the use of strain-softening models for the simulation of strong discontinuities in solids. Mater. Instab. Solids 1998, 107–123. [Google Scholar]
- Oliver, J.; Cervera, M.; Manzoli, O. Strong discontinuities and continuum plasticity models: The strong discontinuity approach. Int. J. Plast. 1999, 15, 319–351. [Google Scholar] [CrossRef]
- Oliver, J. On the discrete constitutive models induced by strong discontinuity kinematics and continuum constitutive equations. Int. J. Solids Struct. 2000, 37, 7207–7229. [Google Scholar] [CrossRef]
- Oliver, J.; Huespe, A.E.; Pulido, M.D.G.; Chaves, E. From continuum mechanics to fracture mechanics: The strong discontinuity approach. Eng. Fract. Mech. 2002, 69, 113–136. [Google Scholar] [CrossRef]
- Oliver, J.; Huespe, A.E.; Pulido, M.D.G.; Blanco, S.; Linero, D. On the fracture models determined by the continuum-strong discontinuity approach. Int. J. Fract. 2006, 137, 211–229. [Google Scholar]
- Haghighat, E.; Pietruszczak, S. On modeling of discrete propagation of localized damage in cohesive-frictional materials. Int. J. Numer. Anal. Meth. Geomech. 2015, 39, 1774–1790. [Google Scholar] [CrossRef]
- Haghighat, E.; Pietruszczak, S. On modeling of fractured media using an enhanced embedded discontinuity approach. Extreme Mech. Lett. 2016, 6, 10–22. [Google Scholar] [CrossRef]
- Hill, R. General theory of uniqueness and stability of elasto-plastic solids. J. Mech. Phys. Solids 1958, 6, 236–249. [Google Scholar] [CrossRef]
- Hill, R. Acceleration waves in solids. J. Mech. Phys. Solids 1962, 10, 1–16. [Google Scholar] [CrossRef]
- Rice, J.R.; Rudnicki, J.W. A note on some features of the theory of localization of deformation. Int. J. Solids Struct. 1980, 16, 597–605. [Google Scholar] [CrossRef]
- Rudnicki, J.W.; Rice, J.R. Conditions of the localization of deformation in pressure-sensitive dilatant material. J. Mech. Phys. Solids 1975, 23, 371–394. [Google Scholar] [CrossRef]
- Runesson, K.; Ottosen, N.S.; Peric, D. Discontinuous bifurcations of elastic-plastic solutions at plane stress and plane strain. Int. J. Plast. 1991, 7, 99–121. [Google Scholar] [CrossRef]
- Thomas, T.Y. Plastic Flow and Fracture of Solids; Academic Press: New York, NY, USA, 1961. [Google Scholar]
- Oliver, J.; Huespe, A.E.; Dias, I.F. Strain localization, strong discontinuities and material fracture: Matches and mismatches. Comput. Methods Appl. Mech. Engrg. 2012, 241–244, 323–336. [Google Scholar] [CrossRef]
- Cervera, M.; Chiumenti, M.; di Capua, D. Benchmarking on bifurcation and localization in J2 plasticity for plane stress and plane strain conditions. Comput. Methods Appl. Mech. Eng. 2012, 241–244, 206–224. [Google Scholar] [CrossRef]
- Mosler, J. On advanced solution strategies to overcome locking effects in strong discontinuity approaches. Int. J. Numer. Meth. Eng. 2005, 63, 1313–1341. [Google Scholar] [CrossRef]
- Wu, J.Y.; Cervera, M. A thermodynamically consistent plastic-damage framework for localized failure in quasi-brittle solids: Material model and strain localization analysis. Int. J. Solids Struct. 2016, 88–89, 227–247. [Google Scholar] [CrossRef]
- Cervera, M.; Chiumenti, M.; Benedetti, L.; Codina, R. Mixed stabilized finite element methods in nonlinear solid mechanics. Part III: Compressible and incompressible plasticity. Comput. Methods Appl. Mech. Eng. 2015, 285, 752–775. [Google Scholar] [CrossRef]
- De Borst, R. Fracture in quasi-brittle materials: A review of continuum damage-based approaches. Eng. Fract. Mech. 2002, 69, 95–112. [Google Scholar] [CrossRef]
- Cervera, M.; Chiumenti, M.; Codina, R. Mixed stabilized finite element methods in nonlinear solid mechanics. Part I: Formulation. Comput. Methods Appl. Mech. Eng. 2010, 199, 2559–2570. [Google Scholar] [CrossRef]
- Cervera, M.; Chiumenti, M.; Codina, R. Mixed stabilized finite element methods in nonlinear solid mechanics. Part II: Strain localization. Comput. Methods Appl. Mech. Eng. 2010, 199, 2571–2589. [Google Scholar] [CrossRef]
- Simó, J.C.; Ju, J.W. Strain- and stress-based continuum damage models. I: Formulation; II: Computational aspects. Int. J. Solids Struct. 1987, 23, 821–869. [Google Scholar] [CrossRef]
- Carol, I.; Rizzi, E.; Willam, K. A unified theory of elastic degradation and damage based on a loading surface. Int. J. Solids Struct. 1994, 31, 2835–2865. [Google Scholar] [CrossRef]
- Carol, I.; Rizzi, E.; Willam, K. On the formulation of anisotropic elastic degradation. I. Theory based on a pseudo-logarithmic damage tensor rate; II. Generalized pseudo-Rankine model for tensile damage. Int. J. Solids Struct. 2011, 38, 491–518, 519–546. [Google Scholar] [CrossRef]
- Wu, J.Y.; Xu, S.L. Reconsideration on the elastic damage/degradation theory for the modeling of microcrack closure-reopening (MCR) effects. Int. J. Solids Struct. 2013, 50, 795–805. [Google Scholar] [CrossRef]
- Wu, J.Y.; Cervera, M. Strain localization and failure mechanics for elastoplastic damage solids. In Monograph CIMNE; M14: Barcelona, Spain, 2014. [Google Scholar]
- Cervera, M.; Chiumenti, M.; Agelet de Saracibar, C. Shear band localization via local J2 continuum damage mechanics. Comput. Methods Appl. Mech. Eng. 2004, 193, 849–880. [Google Scholar] [CrossRef]
- Remmers, J.J.C.; de Borst, R.; Verhoosel and Needleman, A. The cohesive band model: A cohesive surface formulation with stress triaxiality. Int. J. Fract. 2013, 181, 177–188. [Google Scholar] [CrossRef]
- De Borst, R.; Gutiérrez, M.A. A unified framework for concrete damage and fracture models including size effects. Int. J. Fract. 1999, 95, 261–277. [Google Scholar] [CrossRef]
- Cervera, M.; Chiumenti, M.; Codina, R. Mesh objective modeling of cracks using continuous linear strain and displacement interpolations. Int. J. Numer. Meth. Eng. 2011, 87, 962–987. [Google Scholar] [CrossRef]
- Brezzi, F.; Fortin, M. Mixed and Hybrid Finite Element Methods; Spinger: New York, NY, USA, 1991. [Google Scholar]
- Cervera, M.; Agelet de Saracibar, C.; Chiumenti, M. COMET: COupled MEchanical and Thermal analysis. Data Input Manual, Version 5.0, Technical Report IT-308. 2002. Available online: http://www.cimne.upc.es.
- GiD: The Personal Pre and Post Processor, 2009. Available online: http://www.gidhome.com.
- Rots, J.G. Computational Modeling of Concrete Fracture. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 1988. [Google Scholar]
- Rashid, Y. Analysis of prestressed concrete pressure vessels. Nucl. Eng. Des. 1968, 7, 334–344. [Google Scholar] [CrossRef]
- Kachanov, L.M. Time of rupture process under creep conditions. Izvestia Akademii Nauk Otd Tech Nauk 1958, 8, 26–31. [Google Scholar]
- Rots, J.G. Smeared crack approach and fracture localization in concrete. Heron 1985, 30, 1–47. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Stress State | ||||||||
|---|---|---|---|---|---|---|---|---|
| Analytical | Numerical | Analytical | Numerical | Analytical | Numerical | Analytical | Numerical | |
| Plane stress | ||||||||
| Plane strain | ||||||||
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, J.-Y.; Cervera, M. Strain Localization of Elastic-Damaging Frictional-Cohesive Materials: Analytical Results and Numerical Verification. Materials 2017, 10, 434. https://doi.org/10.3390/ma10040434
Wu J-Y, Cervera M. Strain Localization of Elastic-Damaging Frictional-Cohesive Materials: Analytical Results and Numerical Verification. Materials. 2017; 10(4):434. https://doi.org/10.3390/ma10040434
Chicago/Turabian StyleWu, Jian-Ying, and Miguel Cervera. 2017. "Strain Localization of Elastic-Damaging Frictional-Cohesive Materials: Analytical Results and Numerical Verification" Materials 10, no. 4: 434. https://doi.org/10.3390/ma10040434
APA StyleWu, J. -Y., & Cervera, M. (2017). Strain Localization of Elastic-Damaging Frictional-Cohesive Materials: Analytical Results and Numerical Verification. Materials, 10(4), 434. https://doi.org/10.3390/ma10040434