Optimization of Functionally Graded Structural Members by Means of New Effective Properties Estimation Method



Abstract
:1. Introduction
2. Theoretical Formulation
2.1. Basic Ideas
2.2. Internal Energy
- be symmetric, positive definite and monotonic function of the volume fraction variable ;
- be reduced to the fourth-rank unit tensor in the absence of inclusions, ;
- transform the properties of the matrix material into the properties of the inclusion material when the volume fraction variable reaches unity.
2.3. Effective Elastic Properties of Isotropic Composite Material
3. Comparison with Classical Averaging Schemes
3.1. Concentration Factors
3.2. Parametric Studies
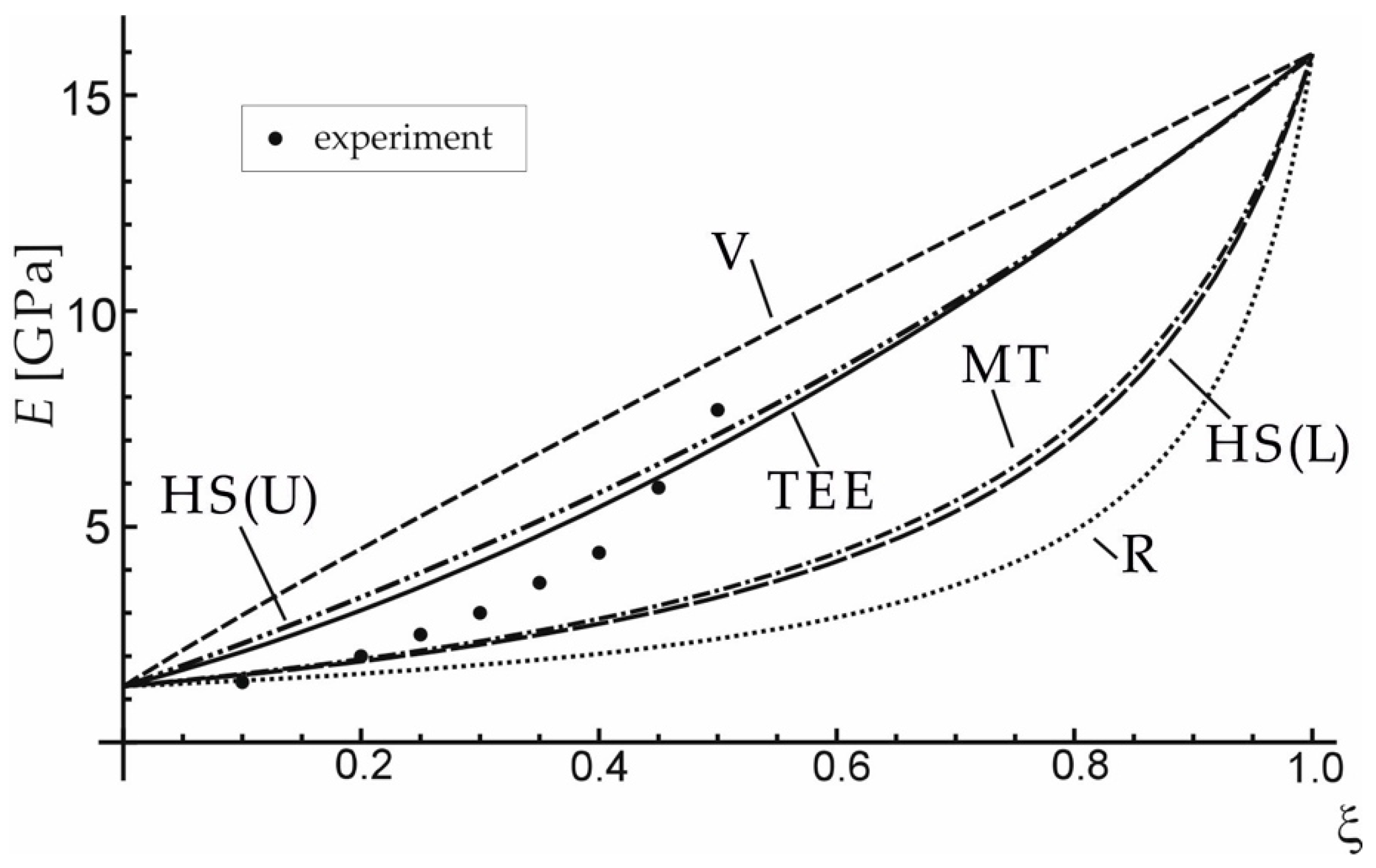
3.3. Validation
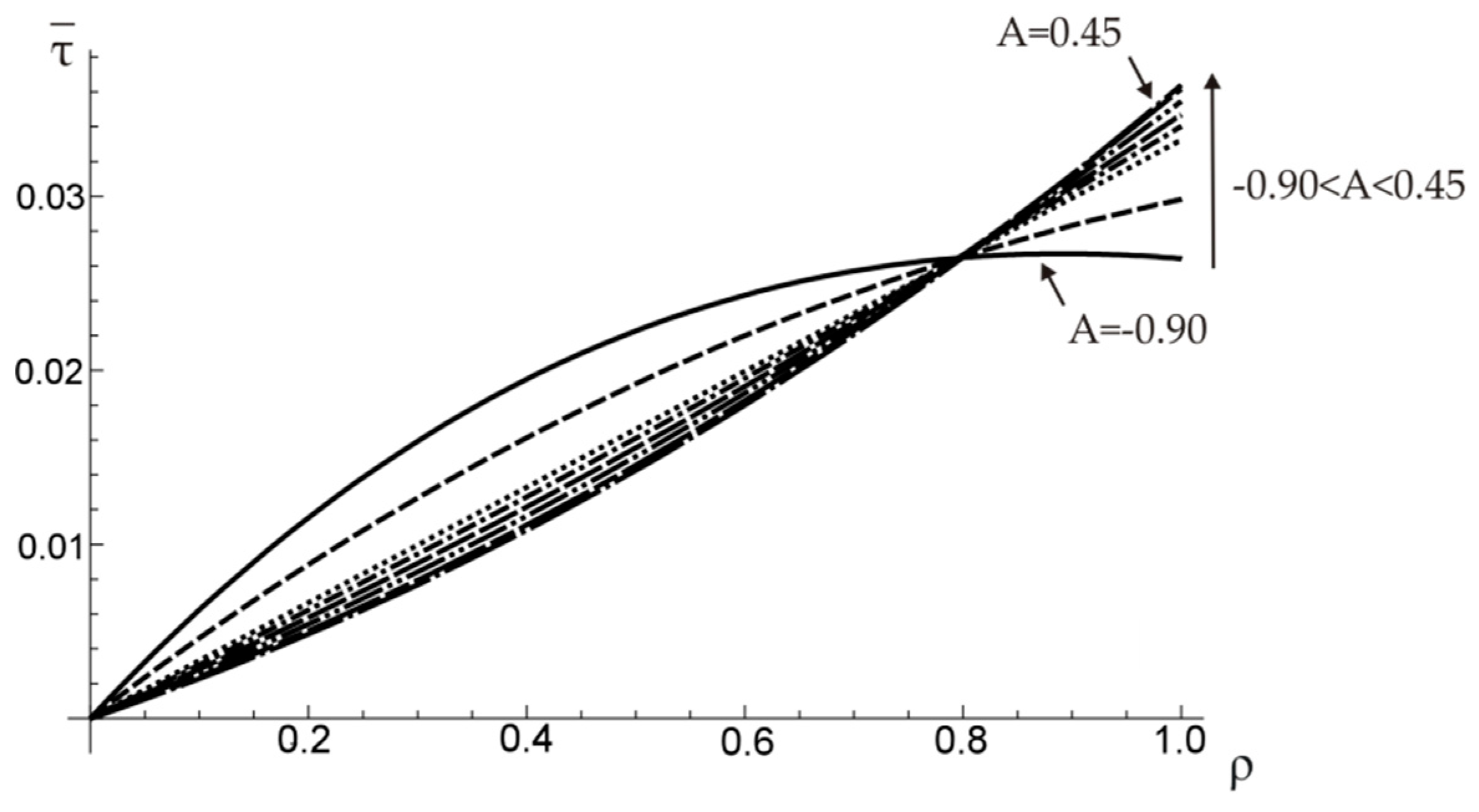
4. Optimal Distribution of Reinforcement in Circular Bar Subjected to Torsion
4.1. Problem Formulation
4.2. Linear Distribution of Inclusions
4.3. Nonlinear Distribution of Inclusions
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Murakami, S. Continuum Damage Mechanics: A Continuum Mechanics Approach to the Analysis of Damage and Fracture; Springer: Dordrecht, The Netherlands, 2012. [Google Scholar]
- Egner, H.; Ryś, M. Total energy equivalence in constitutive modelling of multidissipative materials. Int. J. Damage Mech. 2017, 3, 417–446. [Google Scholar] [CrossRef]
- Ryś, M.; Egner, H. Energy equivalence based constitutive model of austenitic stainless steel at cryogenic temperatures. Int. J. Solids Struct. 2019, 164, 52–65. [Google Scholar] [CrossRef]
- Egner, H.; Egner, W. Classification of Constitutive Equations for Dissipative Materials-General Review. In Mechanics of Anisotropic Materials; Skrzypek, J.J., Ganczarski, A.W., Eds.; Springer International: Cham, Switzerland, 2015; pp. 247–294. [Google Scholar]
- Wiśniewska, A.; Hernik, S.; Liber-Kneć, A.; Egner, H. Effective properties of composite material based on total strain energy equivalence. Compos. Part B Eng. 2019, 166, 213–220. [Google Scholar] [CrossRef]
- Voigt, W. Über die Beziehungen zwischen den beiden Elastizitäskonstanten isotroper Körper. Wied Ann. 1889, 38, 573–587. [Google Scholar] [CrossRef]
- Reuss, A. Berechnung der Fliessgrenze von Mischkristallen auf Grund der Plastizitätsbedingung für Einkristalle. Z. Angew. Math. Mech. 1929, 9, 49–58. [Google Scholar] [CrossRef]
- Hashin, Z.; Shtrikman, S. A variational approach to the theory of the elastic behaviour of polycrystals. J. Mech. Phys. Solid 1962, 10, 343–352. [Google Scholar] [CrossRef]
- Mori, T.; Tanaka, K. Average stress in matrix and average elastic energy of materials with misfitting inclusions. Acta Metal. 1973, 21, 571–574. [Google Scholar] [CrossRef]
- Hill, R. A theory of the yielding and plastic flow of anisotropic materials. Proc. Roy. Soc. Lond. A 1948, 193, 281–297. [Google Scholar]
- Saeb, S.; Steinmann, P.; Javili, A. Aspects of Computational Homogenization at Finite Deformations: A Unifying Review from Reuss’ to Voigt’s Bound. Appl. Mech. Rev. 2016, 68, 050801. [Google Scholar] [CrossRef]
- Geers, M.G.D.; Kouznetsova, V.; Brekelmans, W.A.M. Multi-scale computational homogenization: Trends and challenges. J. Comput. Appl. Math. 2010, 234, 2175–2182. [Google Scholar] [CrossRef]
- Charalambakis, N.; Chatzigeorgiou, G.; Chemisky, Y.; Meraghni, F. Mathematical homogenization of inelastic dissipative materials: A survey and recent progress. Continuum. Mech. Therm. 2018, 30, 1–51. [Google Scholar] [CrossRef]
- Firooz, S.; Saeb, S.; Chatzigeorgiou, G.; Meraghni, F.; Steinmann, P.; Javili, A. Systematic study on homogenization and the utility of circular simplified representative volume element. Math. Mech. Solids 2019, 24, 2961–2985. [Google Scholar] [CrossRef]
- Yadegari, S.; Turteltaub, S.; Suiker, A.S. Generalized grain cluster method for multiscale response of multiphase materials. Comput. Mech. 2015, 56, 193–219. [Google Scholar] [CrossRef] [Green Version]
- Matsui, K.; Terada, K.; Yuge, K. Two-scale finite element analysis of heterogeneous solids with periodic microstructures. Comput. Struct. 2004, 82, 593–606. [Google Scholar] [CrossRef]
- Yvonnet, J.; Monteiro, E.; He, Q.C. Computational homogenization method and reduced database model for hyperelastic heterogeneous structures. Int. J. Multiscale Comput. Eng. 2013, 11, 201–225. [Google Scholar] [CrossRef]
- Fabbrocino, F.; Funari, M.F.; Greco, F.; Lonetti, P.; Luciano, R.; Penna, R. Dynamic crack growth based on moving mesh method. Compos. Part B Eng. 2019, 174, 107053. [Google Scholar] [CrossRef]
- Funari, M.F.; Lonetti, P.; Spadea, S. A crack growth strategy based on moving mesh method and fracture mechanics. Theor. Appl. Fract. Mech. 2019, 102, 103–115. [Google Scholar] [CrossRef]
- Ombres, L.; Verre, S. Flexural Strengthening of RC Beams with Steel-Reinforced Grout: Experimental and Numerical Investigation. J. Compos. Constr. 2019, 23. [Google Scholar] [CrossRef]
- Ganczarski, A.W.; Egner, H.; Cegielski, M. Deactivation of Damage Effects. In Encyclopedia of Continuum Mechanics; Altenbach, H., Öchsner, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar] [CrossRef]
- Skrzypek, J.J.; Kuna-Ciskał, H. Anisotropic elastic-brittle-damage and fracture models based on irreversible thermodynamics. In ABDM Anisotropic Behaviour of Damaged Materials; Skrzypek, J.J., Ganczarski, A.W., Eds.; Springer: Berlin/Heidelberg, Germany, 2003; pp. 143–184. [Google Scholar]
- Saanouni, K.; Forster, C.; Ben Hatira, F. On the anelastic flow with damage. Int. J. Damage Mech. 1994, 3, 140–169. [Google Scholar] [CrossRef]
- Skrzypek, J.J.; Ganczarski, A.W.; Rustichelli, F.; Egner, H. Advanced Materials and Structures for Extreme Operating Conditions; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Egner, H. On the full coupling between thermo-plasticity and thermo-damage in thermodynamic modeling of dissipative materials. Int. J. Solids Struct. 2012, 49, 279–288. [Google Scholar] [CrossRef]
- Kursa, M.; Kowalczyk-Gajewska, K.; Lewandowski, M.J.; Petryk, H. Elastic-plastic properties of metal matrix composites: Validation of meanfield approaches. Eur. J. Mech. A Solid 2018, 68, 53–66. [Google Scholar] [CrossRef]
- Sadowski, P.; Kowalczyk-Gajewska, K.; Stupkiewicz, S. Classical estimates of the effective thermoelastic properties of copper–graphene composites. Compos. Part B Eng. 2015, 80, 278–290. [Google Scholar] [CrossRef]
- Hori, M.; Nemat-Nasser, S. On two micromechanics theories for determining micro–macro relations in heterogeneous solids. Mech. Mater. 1999, 31, 667–682. [Google Scholar] [CrossRef]
- Charrière, E.; Terrazzoni, S.; Pittet, C.; Mordasini, P.; Dutoit, M.; Lemaître, J.; Zysset, P. Mechanical characterization of brushite and hydroxyapatite cements. Biomaterials 2001, 22, 2937–2945. [Google Scholar] [CrossRef]
- Bonfield, W. Hydroxyapatite-Reinforced Polyethylene as an Analogous Material for Bone Replacement. Ann. N. Y. Acad. Sci. 1988, 523, 173–177. [Google Scholar] [CrossRef]
- Starr, T. Carbon and High Performance Fibres Directory and Databook, 6th ed.; Springer Netherlands: Dordrecht, The Netherlands, 1995. [Google Scholar]
- Bino, D.; Retnam, B.S.J.; Ramachandran, M.; Sivapragash, M. Analysis of mechanical properties of glass and carbon fiber reinforced polymer material. Int. J. Appl. Eng. Res. 2015, 10, 10387–10391. [Google Scholar]
- Skoczeń, B. Functionally graded structural members obtained via the low temperature strain induced phase transformation. Int. J. Solids Struct. 2007, 44, 5182–5207. [Google Scholar] [CrossRef] [Green Version]
- Wang, B.L.; Han, J.C.; Du, S.Y. Crack problems for functionally graded materials under transient thermal loading. J. Therm. Stresses 2000, 23, 143–168. [Google Scholar]
- Lee, W.Y.; Stinton, D.P.; Berndt, C.C.; Erdogan, F.; Lee, Y.-D.; Mutasin, Z. Concept of functionally graded materials for advanced thermal barrier coating applications. J. Am. Ceram. Soc. 1996, 79, 3003–3012. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RVE: Representative volume element | : Inclusion-effect tensor |
| V: Voigt’s estimate | : Kronecker’s symbol |
| R: Reuss’ estimate | : Bulk modulus |
| HS (U): Hashin-Shtrikman upper | : Lamé parameters |
| HS (L): Hashin-Shtrikman lower | : Concentration factors |
| MT: Mori-Tanaka estimate | : Radius of cross-section |
| TEE: Estimate based on total energy equivalence | : Distance from the cross-section centroid |
| : Volume fraction of inclusions in RVE | : Length of bar |
| : Helmholtz’ free energy | : Angle of twist |
| : Cauchy stress tensor | : Torque |
| : Strain tensor | : Shearing stress |
| : Elasticity tensor |
| Inclusion Effect Tensor | Effective Lamé Constants |
|---|---|
| V | 1 | 1 | 1 | 1 |
| R | ||||
| HS (U) | ||||
| HS (L) | ||||
| MT | ||||
| TEE |
| Material | Young Modulus E (GPa) | Poisson Ratio ν (-) | Lamé Constant λ (GPa) | Lamé Constant μ (GPa) |
|---|---|---|---|---|
| POM T-300 | 3.42 | 0.350 | 2.96 | 1.27 |
| CF Fortafil F-3 | 227.00 1 | 0.320 2 | 152.86 | 85.98 |
| Material | Young Modulus E (GPa) | Poisson Ratio ν (-) | Lamé Constant λ (GPa) | Lamé Constant μ (GPa) |
|---|---|---|---|---|
| PE | 1.30 1 | 0.400 | 1.86 | 0.46 |
| HAp | 15.95 2 | 0.140 2 | 2.72 | 7.00 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wiśniewska, A.; Egner, H. Optimization of Functionally Graded Structural Members by Means of New Effective Properties Estimation Method. Materials 2019, 12, 3139. https://doi.org/10.3390/ma12193139
Wiśniewska A, Egner H. Optimization of Functionally Graded Structural Members by Means of New Effective Properties Estimation Method. Materials. 2019; 12(19):3139. https://doi.org/10.3390/ma12193139
Chicago/Turabian StyleWiśniewska, Anna, and Halina Egner. 2019. "Optimization of Functionally Graded Structural Members by Means of New Effective Properties Estimation Method" Materials 12, no. 19: 3139. https://doi.org/10.3390/ma12193139
APA StyleWiśniewska, A., & Egner, H. (2019). Optimization of Functionally Graded Structural Members by Means of New Effective Properties Estimation Method. Materials, 12(19), 3139. https://doi.org/10.3390/ma12193139