New Risk Methodology Based on Control Charts to Assess Occupational Risks in Manufacturing Processes



Abstract
:1. Introduction
- Prevention (P): be the process of avoiding or mitigating risks by reducing their probability of occurrence and their impacts on human and social; geographical and landscape; economic and infrastructure; environmental and ecosystem preservation; accident and safety (human, assets, production); perception and expectations.
- Simultaneity (S): is the ability to update the evolution of risk according to the operation in real time.
- Immediacy (I): is the ability to inform or infer the existence of a risk with sufficient anticipation to make the necessary corrections before the accident occurs.
2. Existing and Related Tools for Occupational Risk Management
2.1. Regulations and Traditional, Modern Models
- The first group corresponds to the standards and directives whose characteristics and degree of compliance with the three characteristics (P), (S), (I) are summarized in Table 1.
- The second group covers methodologies and models differentiating the traditional and the modern approaches [38]. The traditional approach includes the sequential and the epidemiological models, summarized in Table 2. The modern approach has five models: the systematic; cloud based; the fuzzy based, formal based and safety barrier based; summarized in Table 3.
- The third group, which is encompassed in the modern methodologies, is specific for dynamic models and it is discussed in the next subsection.
2.2. The Dynamic Risk Models
- Risk identification is similar as presented in the ISO/IEC 31010:2019. The identification of potential risks are performed by the application of HAZOP/HAZID and FMEA, FMECA techniques [95].
- Scenario consideration is similar to the answer to the “What if?” question. Scenarios reflecting the “best case”, “worst case” and “expected case” may be used for quantifying the probability of potential consequences and obtain a sensitivity analysis.
- After identification of causes of risk, their paths and sequences through the safety barriers are defined using the ETA or FTA methods under a bow-tie graph and ending at the final states. Reliability data bases can be applied for human, equipment or barriers failure, or using expert judgment [96,97].
- Observation of precursor data, events and situations from the workplace or the process under analysis.
- Posterior estimation is performed using Bayesian inference through the expression:
3. Statistical Risk Control (SRC) Methodology
3.1. General Application
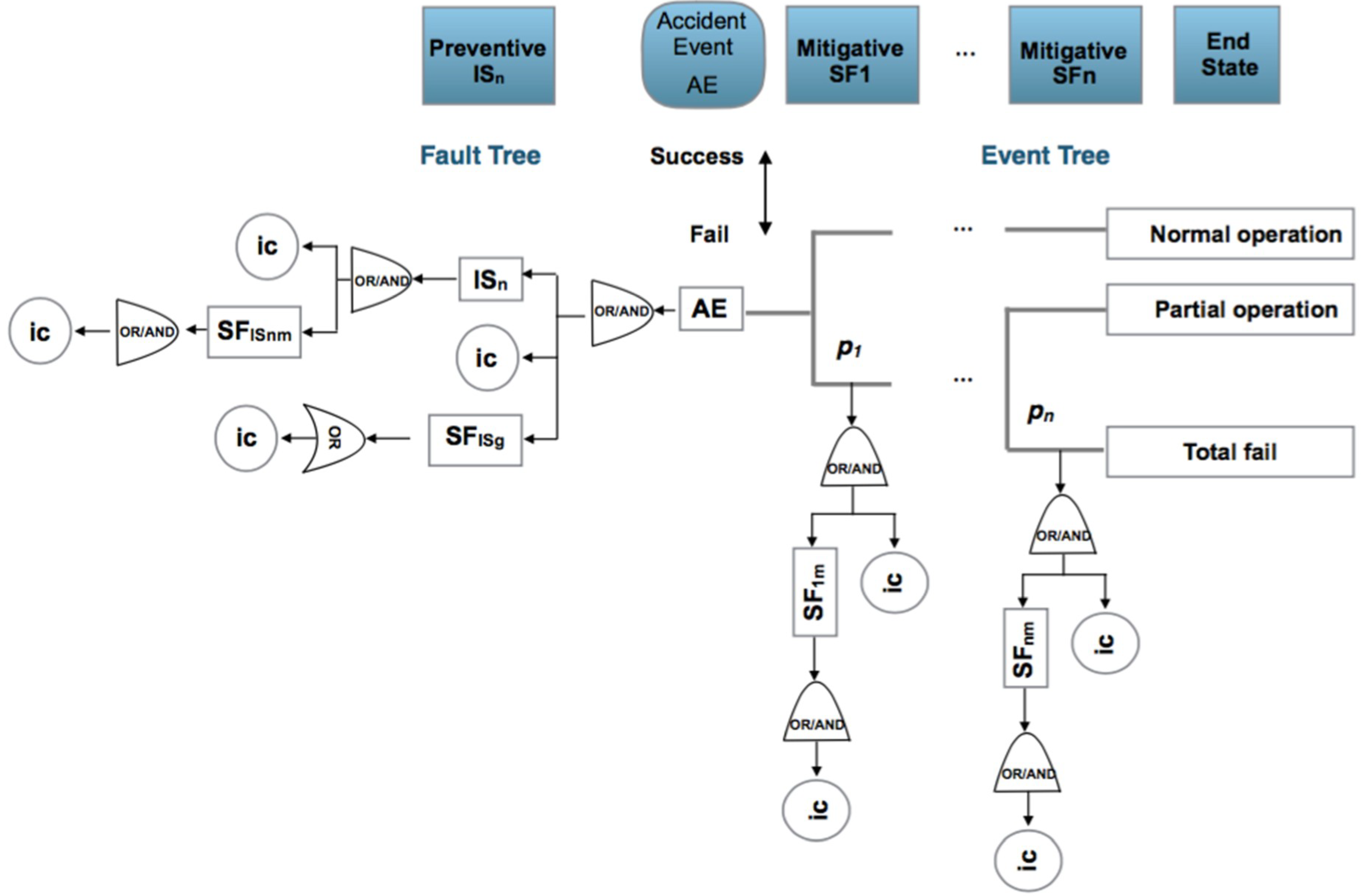
- A bow-tie analysis is performed to provide a visual representation of the causes of initiation (ic) classified as basic, human and potential that affect preventive and mitigative safety barriers and the consequences or final states when an accident occurs, Figure 5.
- The identification and definition of the initiation causes (ic) which may be: basic events (ba) such as failures in control systems, equipment or processes; human risk factors (ha) which are human errors and the potential causes (pot), which will be defined in the following subsection. The process is iterative between step 1 and step 2 until the causes and consequences have been clearly established.
- From the previous steps 1 and 2, the statistical parameter p that expresses the risk probability is also identified and the prior statistical distribution that reflects it can be established. Also the prior transition and emission matrices governing changes in the mitigative safety barriers can be defined.
- The observation of the initiation causes (ic) and end states are put into effect according to a time interval.
- From the estimated prior f(p) and the observed initiation causes (ic), such as g(data/p) and applying Equation (1), the posterior function for the statistical parameter (p) can be obtained and if there is not an analytical expression for it then the Metropolis–Hastings sampling method can be applied to obtain the posterior distribution and its associated parameters [113,114]. Also corresponding to the hidden Markov chain, the prior transition and emission matrices are defined for the mitigative safety barriers and the posterior transition and emission matrices are obtained using the Baum–Welch algorithm, [115,116].
- Direct: uses the observed data up to the analyzed interval time, but with two possibilities: the mean established in the prior function that defines the statistical parameter (p) is constant in every interval, and the standard deviation is determined using the observed data collected up to the analyzed interval, (Direct–Mean Prior) or by modifying the mean and the standard deviation also using the observed data collected up to the analyzed interval (Direct–Mean Posterior).
- Recurrent: uses the observed data in every interval time, also with two possibilities: maintaining the mean posterior constant, and the standard deviation obtained in every interval is the new prior in the following interval (Recurrent–Mean Prior), or the mean and the standard deviation obtained in every interval are the prior values in the following interval (Recurrent–Mean Posterior).
- For the complete bow-tie scheme, Figure 6.
- a.1.
- Collecting the total of the initiation causes (ic) affecting all the preventive and mitigative safety barriers and their barrier sub-functions.
- a.2.
- Collecting only the first level for initiation causes (ic) and fails in first level of barrier sub-functions.
- Observing the fault tree (FT) and event tree (ET), and analyzing the response active (yes) or (no) for the preventive and mitigative safety barriers.
- 7.
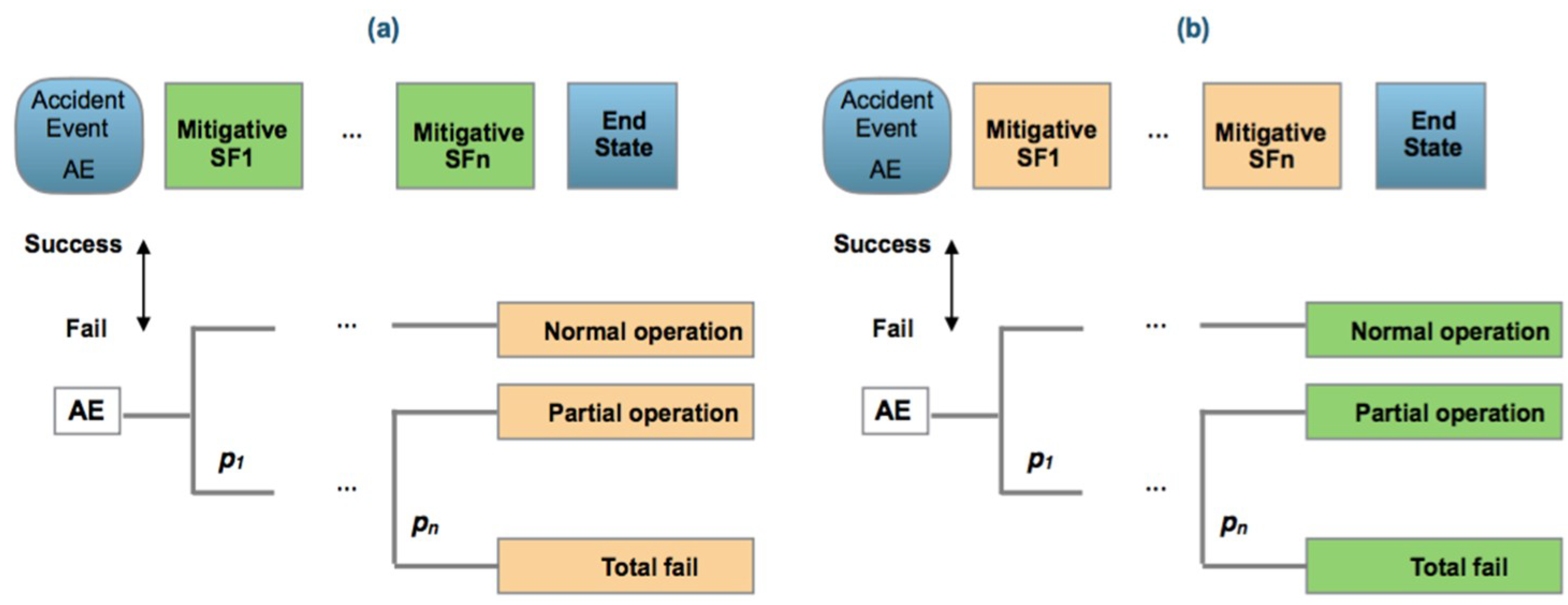
- Analysis applying a hidden Monte Carlo Markov Chain for the mitigative safety barriers, also with two possibilities, Figure 7.
- Analyzing the behavior of the mitigative safety barriers based on the end states. In this case a transition matrix is defined for the mitigative barriers and an emission matrix for the observed end states in function of the barriers’ transition.
- Analyzing the behavior of the end states based on the action of the mitigative barriers. In this case a transition matrix is defined for the end sates and an emission matrix for the observed mitigative safety barriers in function of the end states.
3.2. Potential Causes (Pot)
3.3. General Application for Occupational Accidents
4. Case Study in a Medium-Density Fiberboard (MDF) Manufacturing Process Plant
4.1. Process
4.2. Results
4.2.1. Poisson–Gamma Model
4.2.2. Exponential–Gamma Model
4.2.3. Weibull–Gamma Model
4.2.4. Exponential–Normal Model
4.2.5. Poisson–Normal Model
4.2.6. Analysis of the Mitigative Safety Barriers Observing End States
4.2.7. Analysis of the End States Observing Mitigative Safety Barriers
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Eurostat. Statistics. 2019. Available online: https://ec.europa.eu/eurostat/statistics-explained/index.php/ (accessed on 15 June 2019).
- MITRAMISS. Spanish Ministery of Labour Migrations and Social Security. Statistics for Occupational Accidents 2019. Available online: http://www.mitramiss.gob.es/estadisticas/eat/welcome.htm (accessed on 19 June 2019).
- Aven, T. Risk assessment and risk management: Review of recent advances on their foundation. Eur. J. Oper. Res. 2016, 253, 1–13. [Google Scholar] [CrossRef]
- ISO 31000:2018. Risk Management Guidelines-International Organization for Standardization. Available online: https://www.iso.org/iso-31000-risk-management.html (accessed on 1 September 2019).
- ISO/IEC 31010:2019. Risk Management-Risk Assessment Techniques. International Organization for Standardization. Available online: https://www.iso.org/standard/72140.html (accessed on 10 September 2019).
- Pasman, H.; Reniers, G. Past, present and future of Quantitative Risk Assessment (QRA) and the incentive it obtained from Land-Use Planning (LUP). J. Loss Prev. Proc. Ind. 2014, 28, 2–9. [Google Scholar] [CrossRef]
- Hollnagel, E. Is safety a subject for science? Saf. Sci. 2014, 67, 21–24. [Google Scholar] [CrossRef]
- Ale, B.J.M.; Baksteen, H.; Bellamy, L.J.; Bloemhof, A.; Goossens, L.; Hale, A.; Mud, M.L.; Oh, J.I.H.; Papazoglou, I.A.; Post, J.; et al. Quantifying occupational risk: The development of an occupational risk model. Saf. Sci. 2008, 46, 176–185. [Google Scholar] [CrossRef]
- Aven, T. What is safety science? Saf. Sci. 2014, 67, 15–20. [Google Scholar] [CrossRef]
- European Agency for Safety and Health at Work. Directive 89/391/EEC of 12 June 1989 on the Introduction of Measures to Encourage Improvements in the Safety and Health of Workers at Work-“Framework Directive”. Available online: https://osha.europa.eu/en/legislation/directives/the-osh-framework-directive/1 (accessed on 2 April 2019).
- Deming, W.E. Out of the Crisis; MIT Press: Cambridge, MA, USA, 1986. [Google Scholar]
- Khan, F.; Rathnayaka, S.; Ahmed, S. Methods and models in process safety and risk management: Past, present and future. Proc. Saf. Environ. Protect. 2015, 98, 116–147. [Google Scholar] [CrossRef]
- Goerlandt, F.; Khakzad, N.; Reniers, G. Validity and validation of safety-related quantitative risk analysis: A review. Saf. Sci. 2017, 99, 127–139. [Google Scholar] [CrossRef]
- CCPS. Guidelines for Hazard Evaluation Procedures; CCPS, AIChE: New York, NY, USA, 2008. [Google Scholar]
- Proskovics, R.; Hutton, G.; Torr, R.; Niclas Scheu, M. Methodology for Risk Assessment of Substructures for Floating Wind Turbines. Energy Procedia 2016, 94, 45–52. [Google Scholar] [CrossRef]
- ISO 45001:2018. Occupational Health and Safety Management Systems—Requirements with Guidance for Use. International Organization for Standardization. Available online: https://www.iso.org/obp/ui#iso:std:iso:45001:ed-1:v1:es (accessed on 5 May 2019).
- NISHW. National Institute for Safety and Health at Work. Occupational Risk Assessment. Spanish Government. 2018. Available online: http://www.insht.es/portal/site/Insht/ (accessed on 21 January 2018).
- Directive 98/24/EC of 7 April 1998 on the Risks Related to Chemical Agents at Work. European Agency for Safety and Health at Work. Available online: https://osha.europa.eu/en/legislation/directives/75 (accessed on 3 May 2019).
- Directive 2004/37/EC of 29 April 2004 on the Carcinogens and Mutagens at Work. European Agency for Safety and Health at Work. Available online: https://osha.europa.eu/en/legislation/directives/directive-2004-37-ec-carcinogens-or-mutagens-at-work (accessed on 12 May 2019).
- Brocal, F.; González, C.; Reniers, G.; Cozzani, V.; Sebastián, M.A. Risk Management of Hazardous Materials in Manufacturing Processes: Links and Transitional Spaces between Occupational Accidents and Major Accidents. Materials 2018, 11, 1915. [Google Scholar] [CrossRef] [PubMed]
- Gul, M.; Fatih, A.K.M. A comparative outline for quantifying risk ratings in occupational health and safety risk assessment. J. Clean. Prod. 2018, 196, 653–664. [Google Scholar] [CrossRef]
- Murè, S.; Demichela, M. Fuzzy Application Procedure (FAP) for the risk assessment of occupational accidents. J. Loss Prev. Proc. Ind. 2009, 22, 593–599. [Google Scholar] [CrossRef]
- Brocal, F.; González, C.; Sebastián, M.A. Technique to identify and characterize new and emerging risks: A new tool for application in manufacturing processes. Saf. Sci. 2018, 109, 144–156. [Google Scholar] [CrossRef]
- Brocal, F.; Sebastián, M.A.; González, C. Theoretical framework for the new and emerging occupational risk modeling and its monitoring through technology lifecycle of industrial processes. Saf. Sci. 2017, 99, 178–186. [Google Scholar] [CrossRef]
- Papazoglou, I.A.; Aneziris, O.N.; Bellamy, L.J.; Ale, B.J.M.; Oh, J. Multi-hazard multi-person quantitative occupational risk model and risk management. Reliab. Eng. Syst. Saf. 2017, 167, 310–326. [Google Scholar] [CrossRef]
- Papazoglou, I.A.; Aneziris, O.N.; Bellamy, L.J.; Ale, B.J.M.; Oh, J. Quantitative occupational risk model: Single hazard. Reliab. Eng. Syst. Saf. 2017, 160, 162–173. [Google Scholar] [CrossRef]
- Song, G.; Khan, F.; Wang, H.; Leighton, S.; Yuan, Z.; Liu, H. Dynamic occupational risk model for offshore operations in harsh environments. Reliab. Eng. Syst. Saf. 2016, 150, 58–64. [Google Scholar] [CrossRef]
- Azadeh-Fard, N.; Schuh, A.; Rashedi, E.; Camelio, J.A. Risk assessment of occupational injuries using Accident Severity Grade. Saf. Sci. 2015, 76, 160–167. [Google Scholar] [CrossRef]
- Aneziris, O.N.; Topali, E.; Papazoglou, I.A. Occupational risk of building construction. Reliab. Eng. Syst. Saf. 2012, 105, 36–46. [Google Scholar] [CrossRef]
- Aneziris, O.N.; Papazoglou, I.A.; Doudakmani, O. Assessment of occupational risks in an aluminium processing industry. Int. J. Ind. Ergon. 2010, 40, 321–329. [Google Scholar] [CrossRef]
- Papazoglou, I.A.; Ale, B.J.M. A logical model for quantification of occupational risk. Reliab. Eng. Syst. Saf. 2007, 92, 785–803. [Google Scholar] [CrossRef]
- Mete, S.; Serin, F.; Ece Oz, N.; Gul, M. A decision-support system based on Pythagorean fuzzy VIKOR for occupational risk assessment of a natural gas pipeline construction. J. Natrl. Gas Sci. Eng. 2019, 71. [Google Scholar] [CrossRef]
- Aneziris, O.N.; Papazoglou, I.A.; Baksteen, H.; Mud, M.; Ale, B.J.; Bellamy, L.J.; Hale, A.R.; Bloemhoff, A.; Post, J.; Oh, J. Quantified risk assessment for fall from height. Saf. Sci. 2008, 46, 198–220. [Google Scholar] [CrossRef]
- Aneziris, O.N.; Papazoglou, I.A.; Mud, M.; Damen, M.; Kuiper, J.; Baksteen, H.; Ale, B.J.; Bellamy, L.J.; Hale, A.R.; Bloemhoff, A.; et al. Towards risk assessment for crane activities. Saf. Sci. 2008, 46, 872–884. [Google Scholar] [CrossRef]
- Aneziris, O.N.; Papazoglou, I.A.; Konstandinidou, M.; Baksteen, H.; Mud, M.; Damen, M.; Bellamy, L.J.; Oh, J. Quantification of occupational risk owing to contact with moving parts of machines. Saf. Sci. 2013, 51, 382–396. [Google Scholar] [CrossRef]
- Aneziris, O.N.; Papazoglou, I.A.; Mud, M.; Damen, M.; Manuel, H.J.; Oh, J. Occupational risk quantification owing to falling objects. Saf. Sci. 2014, 69, 57–70. [Google Scholar] [CrossRef]
- Aneziris, O.N.; Papazoglou, I.A.; Psinias, A. Occupational risk for an onshore wind farm. Saf. Sci. 2016, 88, 188–198. [Google Scholar] [CrossRef]
- Al-shanini, A.; Ahmad, A.; Khan, F. Accident modeling and analysis in process industries. J. Loss Prev. Proc. Ind. 2014, 32, 319–334. [Google Scholar] [CrossRef]
- Matos, S.; Lopes, E. Prince2 or PMBOK—A question of choice. Procedia Tech. 2013, 9, 787–794. [Google Scholar] [CrossRef]
- Aloini, D.; Dulmin, R.; Mininno, V. Risk assessment in ERP project. Inf. Syst. 2012, 37, 183–199. [Google Scholar] [CrossRef]
- Willey, R.J. Layer of Protection Analysis. Procedia Eng. 2014, 84, 12–22. [Google Scholar] [CrossRef]
- Jin, J.; Shuai, B.; Wang, X.; Zhu, Z. Theoretical basis of quantification for layer of protection analysis (LOPA). Ann. Nucl. Energy 2016, 87, 69–73. [Google Scholar] [CrossRef]
- Yan, F.; Xu, K. A set pair analysis based layer of protection analysis and its application in quantitative risk assessment. J. Loss Prev. Proc. Ind. 2018, 55, 313–319. [Google Scholar] [CrossRef]
- NORSOK. Risk and Emergency Preparedness Assessment. 2010. Available online: https://www.standard.no/en/ (accessed on 5 January 2018).
- Yang, X.; Haugen, S. Classification of risk to support decision-making in hazardous processes. Saf. Sci. 2015, 80, 115–126. [Google Scholar] [CrossRef]
- Yang, X.; Haugen, S.; Paltrinieri, N. Clarifying the concept of operational risk assessment in the oil and gas industry. Saf. Sci. 2018, 108, 259–268. [Google Scholar] [CrossRef]
- Directive 2012/18/EU of 4 July 2012 on the Control of Major Accident Hazards Involving Dangerous Substances. Seveso III. Official Journal of the European Union. Available online: http://data.europa.eu/eli/dir/2012/18/oj (accessed on 9 January 2018).
- COMAH. The Control of Major Accident Hazard Regulations, 3rd ed.; Health Safety Executive Books: London, UK, 2015. [Google Scholar]
- CPR 18E. Guidelines for Quantitative Risk Assessment-Purple Book. Publication Series on Dangerous Substances. 1999. (Publicatiereeks Gevaarlijke Stoffen PGS 3). Available online: http://content.publicatiereeksgevaarlijkestoffen.nl/ (accessed on 23 March 2018).
- EN 16991:2018. Risk-Based Inspection Framework; European Committee for Standardization: Geneva, Switzerland, 2018. [Google Scholar]
- Khan, F.; Sadiq, R.; Haddara, M.M. Risk-based inspection and maintenance (RBIM). Multi-attribute Decision-making with Aggregative Risk Analysis. Proc. Saf. Environ. Prot. 2004, 82, 398–411. [Google Scholar] [CrossRef]
- Mutlu, N.G.; Altuntas, S. Risk analysis for occupational safety and health in the textile industry: Integration of FMEA, FTA, and BIFPET methods. Int. J. Ind. Ergon. 2019, 72, 222–240. [Google Scholar] [CrossRef]
- Castiglia, F.; Giardina, M. Analysis of operator human errors in hydrogen refuelling stations: Comparison between human rate assessment techniques. Int. J. Hydrogen Energy 2013, 38, 1166–1176. [Google Scholar] [CrossRef]
- Rausand, M. Reliability of Safety—Critical Systems. In Theory and Applications; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2014; Available online: https://www.ntnu.edu/ross/books/sis (accessed on 15 December 2017).
- Mai Le, L.M.; Reitter, D.; He, S.; Té Bonle, F.; Launois, A.; Martinez, D.; Prognon, P.; Caudron, E. Safety analysis of occupational exposure of healthcare workers to residual contaminations of cytotoxic drugs using FMECAsecurity approach. Sci. Total Environ. 2017, 599, 1939–1944. [Google Scholar] [CrossRef]
- Zio, E. The Monte Carlo Simulation Method for System Reliability and Risk Analysis; Springer: London, UK, 2013. [Google Scholar]
- Rausand, M.; Hoyland, A. System Reliability Theory. In Models Statistical Methods and Applications; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2004. [Google Scholar]
- Koscielny, J.M.; Syfert, M.; Fajdek, B.; Kozak, A. The application of a graph of a process in HAZOP analysis in accident prevention system. J. Loss Prev. Proc. Ind. 2017, 50, 55–66. [Google Scholar] [CrossRef]
- Petroleum Safety Authority. Principles for Barrier Management in the Petroleum Industry. Technical Report. 2013. Available online: http://www.ptil.no/getfile.php/PDF/Barrierenotatet%202013%20engelsk%20april.pdf (accessed on 17 January 2019).
- Hauge, S.; Øien, K. Guidance for Barrier Management in the Petroleum Industry. 2016. SINTEF Safety Research Report A27623. Available online: https://www.sintef.no/globalassets/project/pds/reports/pds-report---guidance-for-barrier-management-in-the-petroleum-industry.pdf (accessed on 7 April 2018).
- Ferjencik, M.; Kuracina, R. MORT WorkSheet or how to make MORT analysis easy. J. Hazard. Mater. 2008, 151, 143–154. [Google Scholar] [CrossRef] [PubMed]
- Lees, F.P. Loss Prevention in the Process Industries, 4th ed.; Butterworth-Heinemann: Oxford, UK, 2012. [Google Scholar]
- Nano, G.; Derudi, M. A Critical Analysis of Techniques for the Reconstruction of Workers Accidents. Chem. Eng. Trans. 2013, 31, 415–420. Available online: https://www.researchgate.net/publication/278081417 (accessed on 12 January 2018).
- Sklet, S. Comparison of some selected methods for accident investigation. J. Hazard. Mater. 2004, 111, 29–37. [Google Scholar] [CrossRef] [PubMed]
- Fahlbruch, B.; Schöbel, M. SOL—Safety through organizational learning: A method for event analysis. Saf. Sci. 2011, 49, 27–31. [Google Scholar] [CrossRef]
- Churchwell, J.S.; Zhang, K.S.; Saleh, J.H. Epidemiology of helicopter accidents: Trends, rates, and covariates. Reliab. Eng. Syst. Saf. 2018, 180, 373–384. [Google Scholar] [CrossRef]
- Ballester, O.C.; LLari, M.; Afquir, S.; Martin, J.L.; Bourdet, N.; Honoré, V.; Masson, C.; Arnoux, P.J. Analysis of trunk impact conditions in motorcycle road accidents based on epidemiological, accidentological data and multibody simulations. Accid. Anal. Prev. 2019, 127, 223–230. [Google Scholar] [CrossRef] [PubMed]
- Rasmussen, J. Risk management in a dynamic society: A modeling problem. Saf. Sci. 1997, 27, 183–213. [Google Scholar] [CrossRef]
- Waterson, P.; Jenkins, D.P.; Salmon, P.M.; Underwood, P. Remixing Rasmussen’s: The Evolution of Accimaps within Systemic Accident Analysis. Appl. Ergon. 2017, 59, 483–503. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Salmon, P.M.; Cornelissen, M.; Trotter, M.J. Systems-based accident analysis methods: A comparison of Accimap, HFACS, and STAMP. Saf. Sci. 2012, 50, 1158–1170. [Google Scholar] [CrossRef]
- Leveson, N. A new accident model for engineering safer systems. Saf. Sci. 2004, 42, 237–270. [Google Scholar] [CrossRef] [Green Version]
- Ouyang, M.; Hong, L.; Yu, M.H.; Fei, Q. STAMP-based analysis on the railway accident and accident spreading: Taking the China–Jiaoji railway accident for example. Saf. Sci. 2010, 48, 544–555. [Google Scholar] [CrossRef]
- Goncalves Filho, A.P.; Jun, G.T.; Waterson, P. Four studies, two methods, one accident—An examination of the reliability and validity of Accimap and STAMP for accident analysis. Saf. Sci. 2019, 113, 310–317. [Google Scholar] [CrossRef]
- Hollnagel, E. Cognitive Reliability and Error Analysis Method (CREAM); Elsevier: Amsterdam, The Netherlands, 1998. [Google Scholar]
- Liao, P.; Luo, X.; Wang, T.; Su, Y. The Mechanism of how Design Failures cause Unsafe Behavior: The Cognitive Reliability and Error Analysis Method (CREAM). Procedia Eng. 2016, 145, 715–722. Available online: http://creativecommons.org/licenses/by-nc-nd/4.0/ (accessed on 18 January 2019). [CrossRef]
- Habibovic, A.; Tivesten, E.; Uchida, N.; Bärgman, J.; Aust, M.L. Driver behavior in car-to-pedestrian incidents: An application of the Driving Reliability and Error Analysis Method (DREAM). Accid. Anal. Prev. 2013, 50, 554–565. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.; Chung, H. A new methodology for accident analysis with human and systeminteraction based on FRAM: Case studies in maritime domain. Saf. Sci. 2018, 109, 57–66. [Google Scholar] [CrossRef]
- Harms-Ringdahl, L. Analysis of safety functions and barriers in accidents. Saf. Sci. 2009, 47, 353–363. [Google Scholar] [CrossRef] [Green Version]
- Yan, F.; Xu, K. Methodology and case study of quantitative preliminary hazard analysisbased on cloud model. J. Loss Prev. Proc. Ind. 2019, 60, 116–124. [Google Scholar] [CrossRef]
- Kumar, A.M.; Rajakarunakaran, S.; Prabhu, V.A. Application of Fuzzy HEART and expert elicitation for quantifying human error probabilities in LPG refuelling station. J. Loss Prev. Proc. Ind. 2017, 48, 186–198. [Google Scholar] [CrossRef]
- Zhou, Q.; Wong, Y.D.; Loh, H.S.; Yuen, K.F. A fuzzy and Bayesian network CREAM model for human reliability analysis—The case of tanker shipping. Saf. Sci. 2018, 105, 149–157. [Google Scholar] [CrossRef]
- Ladkin, P.; Loer, K. Analising Aviation Accidents Using WB-Analysis—An Application of Multimodal Reasoning; Technical Report SS-98-04; Universität Bielefeld: Bielefeld, Germany, 1998; pp. 169–174. [Google Scholar]
- Kujath, M.F.; Amyotte, P.; Khan, F. A conceptual offshore oil and gas process accident model. J. Loss Prev. Proc. Ind. 2010, 23, 323–330. [Google Scholar] [CrossRef]
- Rathnayaka, S.; Khan, F.; Amyotte, P. SHIPP methodology: Predictive accident modeling approach. Part I: Methodology and model description. Proc. Saf. Environ. Prot. 2011, 89, 151–164. [Google Scholar] [CrossRef]
- Rathnayaka, S.; Khan, F.; Amyotte, P. SHIPP methodology: Predictive accident modeling approach. Part II: Validation with case study. Proc. Saf. Environ. Prot. 2011, 89, 75–88. [Google Scholar] [CrossRef]
- Paltrinieri, N.; Scarponi, G.E.; Khan, F.; Hauge, S. Addressing Dynamic Risk in the Petroleum Industry by Means of Innovative Analysis Solutions. Chem. Eng. Trans. 2014, 36, 451–456. [Google Scholar] [CrossRef]
- Villa, V.; Paltrinieri, N.; Khan, F.; Cozzani, V. Towards dynamic risk analysis: A review of the risk assessment approach and its limitations in the chemical process industry. Saf. Sci. 2016, 89, 77–93. [Google Scholar] [CrossRef]
- Misuri, A.; Khakzad, N.; Reniers, G.; Cozzani, V. A Bayesian network methodology for optimal security management of critical infrastructures. Reliab. Eng. Syst. Saf. 2018, 191, 106112. [Google Scholar] [CrossRef]
- Bier, V.M.; Yi, W. A Bayesian method for analyzing dependencies in precursor data. Int. J. For. 1995, 11, 25–41. [Google Scholar] [CrossRef]
- Meel, A. Dynamic Risk Assessment of Inherently Safer Chemical Processes: An Accident Precursor Approach. 2007. Available online: https://search.proquest.com/openview/b75c47f89e1984b2e6af5ea788cf26e2/1?pq-origsite=gscholar&cbl=18750&diss=y (accessed on 24 January 2018).
- Khan, F.; Hashemi, S.J.; Paltrinieri, N.; Amyotte, P.; Cozzani, V.; Reniers, G. Dynamic risk management: A contemporary approach to process safety management. Curr. Opin. Chem. Eng. 2016, 14, 9–17. [Google Scholar] [CrossRef] [Green Version]
- Khakzad, N.; Khan, F.; Amyotte, P. Safety analysis in process facilities: Comparison of fault tree and Bayesian network approaches. Reliab. Eng. Syst. Saf. 2011, 96, 925–932. [Google Scholar] [CrossRef]
- Kanes, R.; Ramirez Marengo, M.C.; Abdel-Moati, H.; Cranefield, J.; Véchot, L. Developing a framework for dynamic risk assessment using Bayesian networks and reliability data. J. Loss Prev. Proc. Ind. 2017, 50, 142–153. [Google Scholar] [CrossRef]
- Paltrinieri, N.; Reniers, G. Dynamic Risk Analysis for Seveso sites. J. Loss Prev. Proc. Ind. 2017, 44, 20–35. [Google Scholar] [CrossRef] [Green Version]
- Pasman, H.J.; Rogers, W.J.; Sam Mannan, M. How can we improve process hazard identification? What can accidentinvestigation methods contribute and what other recent developments? Abrief historical survey and a sketch of how to advance. J. Loss Prev. Proc. Ind. 2018, 55, 80–106. [Google Scholar] [CrossRef]
- Meel, A.; Seider, W.D. Plant—Specific dynamic failure assessment using Bayesian Theory. Chem. Eng. Sci. 2006, 61, 7036–7056. [Google Scholar] [CrossRef]
- Kalantarnia, M.; Khan, F.; Hawboldt, K. Dynamic risk assessment using failure assessment and Bayesian theory. J. Loss Prev. Proc. Ind. 2009, 22, 600–606. [Google Scholar] [CrossRef]
- Kalantarnia, M.; Khan, F.; Hawboldt, K. Modelling of BP Texas city refinery accident using dynamic risk assessment approach. Proc. Saf. Environ. Prot. 2010, 88, 191–199. [Google Scholar] [CrossRef]
- Yang, M.; Khan, F.I.; Lye, L. Precursor-based hierarchical Bayesian approach for rare event frequency estimation: A case of oil spill accidents. Proc. Saf. Environ. Prot. 2013, 91, 333–342. [Google Scholar] [CrossRef]
- Yuan, Z.; Khakzad, N.; Khan, F.; Amyotte, P. Domino effect analysis of dust explosions using Bayesian networks. Proc. Saf. Environ. Prot. 2016, 100, 108–116. [Google Scholar] [CrossRef]
- Khakzad, N.; Khan, F.; Amyotte, P. Dynamic Safety analysis of process systems by mapping bow-tie into Bayesian network. Proc. Saf. Environ. Prot. 2013, 91, 46–53. [Google Scholar] [CrossRef]
- Yeo, C.; Bhandari, J.; Abbasi, R.; Garaniya, V.; Chai, S.; Shomali, B. Dynamic risk analysis of offloading process in floating liquefied natural gas (FLNG) platform using Bayesian Network. J. Loss Prev. Proc. Ind. 2016, 41, 259–269. [Google Scholar] [CrossRef]
- Barua, S.; Gao, X.; Pasman, H.; Mannan, M.S. Bayesian network based dynamic operational risk assessment. J. Loss Prev. Proc. Ind. 2016, 41, 399–410. [Google Scholar] [CrossRef]
- Paltrinieri, N.; Tugnoli, A.; Buston, J.; Wardman, M.; Cozzani, V. Dynamic Procedure for Atypical Scenarios Identification (DyPASI): A new systematic HAZID tool. J. Loss Prev. Proc. Ind. 2013, 26, 683–695. [Google Scholar] [CrossRef]
- Paltrinieri, N.; Tugnoli, A.; Buston, J.; Wardman, M.; Cozzani, V. DyPASI Methodology: From Information Retrieval to Integration of HAZID Process. Chem. Eng. Trans. 2013, 32, 433–438. [Google Scholar] [CrossRef]
- Paltrinieri, N.; Khan, F.; Amyotte, P.; Cozzani, V. Dynamic approach to risk management: Application to the Hoeganaes metal dust accidents. Proc. Saf. Environ. Prot. 2014, 92, 669–679. [Google Scholar] [CrossRef]
- Bucelli, M.; Paltrinieri, N.; Landucci, G. Integrated risk assessment for oil and gas installations in sensitive areas. Ocean Eng. 2018, 150, 377–390. [Google Scholar] [CrossRef]
- Yang, X.; Sam Mannan, M. The development and application of dynamic operational risk assessment in oil/gas and chemical process industry. Reliab. Eng. Syst. Saf. 2010, 95, 806–815. [Google Scholar] [CrossRef]
- Colin, J.; Vanhoucke, M. Developing a framework for statistical process control approaches in project management. Int. J. Proj. Manag. 2015, 33, 1289–1300. [Google Scholar] [CrossRef]
- Corbett, C.J.; Pan, J. Evaluating environmental performance using statistical process control techniques. Eur. J. Oper. Res. 2002, 139, 68–83. [Google Scholar] [CrossRef]
- Aliverdi, R.; Naeni, L.M.; Salehipour, A. Monitoring project duration and cost in construction project by applying statistical quality control charts. Int. J. Proj. Manag. 2013, 31, 411–423. [Google Scholar] [CrossRef]
- Folch-Calvo, M.; Sebastian, M.A. Dynamic Risk Methodology through Statistical Risk Control applied to the project management in high uncertainty environments. In Proceedings of the 22nd International Congress on Project Management and Engineering—ICPME, Madrid, Spain, 11–13 July 2018; Available online: htpps://www.researchgate.net (accessed on 2 August 2018).
- Hoff, P.D. A First Course in Bayesian Statistical Methods; Springer: New York, NY, USA, 2009. [Google Scholar]
- Puza, B. Bayesian Methods for Statistical Analysis; Australian National University ANU eView: Canberra, Australia, 2015. [Google Scholar]
- Rabiner, L. A tutorial on Hidden Markov Models and selected applications in speechrecognition. Proc. IEEE 1989, 77, 257–286. [Google Scholar] [CrossRef]
- Kulkarny, V.G. Introduction to Modeling and Analysis of Stochastic Systems, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Montgomery, D.C. Introduction to Statistical Quality Control, 6th ed.; John Wiley & Sons: Hoboken, NJ, USA, 2009. [Google Scholar]
- Ross, S.M. Introduction to Probability and Statistics for Engineers and Scientists, 4th ed.; Elsevier: Amsterdam, The Netherlands, 2009. [Google Scholar]
- Flage, R.; Aven, T. Emerging risk—Conceptual definition and a relation to black swan type of events. Reliab. Eng. Syst. Saf. 2015, 144, 61–67. [Google Scholar] [CrossRef] [Green Version]
- Hajikazemi, S.; Ekambaram, A.; Andersen, B.; Zidane, Y.J.T. The Black Swan—Knowing the unknown in projects. Procedia Soc. Behav. Sci. 2016, 226, 184–192. [Google Scholar] [CrossRef] [Green Version]
- Dodson, K.; Westney, R. Predictable Projects in a World of Black Swans; Westney Consulting Group: Houston, TX, USA, 2009; Available online: http://www.westney.com/insights/archive (accessed on 22 June 2019).
- Baybutt, P. The role of people and human factors in performing process hazard analysis and layers of protection analysis. J. Loss Prev. Proc. Ind. 2013, 26, 1352–1365. [Google Scholar] [CrossRef]
- Kariuki, S.G.; Löwe, K. Integrating human factors into process hazard analysis. Reliab. Eng. Syst. Saf. 2007, 92, 1764–1773. [Google Scholar] [CrossRef]
- Eurofound. Sixth European Working Conditions Survey—Overview Report; Publications Office of the European Union: Luxembourg, 2017. [Google Scholar]
- EU-OSHA. Expert Forecast on Emerging Chemical Risks Related to Occupational Safety and Health. European Agency for Safety and Health at Work. 2009. Publications Office of the European Union. Luxembourg. Available online: https://osha.europa.eu/en/tools-and publications/publications/reports/TE3008390ENC_chemical_risks/view (accessed on 7 May 2018).
- Bubbico, R.; Lee, S.; Moscati, D.; Paltrinieri, N. Dynamic assessment of safety barriers preventing escalation in offshore Oil & Gas. Saf. Sci. 2020, 121, 319–330. [Google Scholar] [CrossRef]
- Meng, X.; Chen, G.; Zhu, G.; Zhu, Y. Dynamic quantitative risk assessment of accidents induced by leakage on offshore platforms using DEMATEL-BN. Int. J. Nav. Arch. Ocean Eng. 2019, 11, 22–32. [Google Scholar] [CrossRef]
- Di Bona, G.; Silvestri, A.; Forcina, A.; Petrillo, A. Total efficient risk priority number (TERPN): A new method for risk assessment. J. Risk Res. 2018, 21, 1384–1408. [Google Scholar] [CrossRef]
- Zaid Kamil, M.; Taleb-Berrouane, M.; Khan, F.; Ahmed, S. Dynamic domino effect risk assessment using Petri-nets. Proc. Saf. Environ. Prot. 2019, 124, 308–316. [Google Scholar] [CrossRef]
- Kabir, S.; Papadopoulos, Y. Applications of Bayesian networks and Petri nets in safety, reliability and risk assessments: A review. Saf. Sci. 2019, 115, 154–175. [Google Scholar] [CrossRef]



































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Std’s / Directives | Application | P | S | I |
|---|---|---|---|---|
| 89/391/EEC | Occupational - basic. [10] | + | - | - |
| ISO 45001:2018 | Implementation of a system of occupational health & safety (OH&S). [16] | + | - | - |
| NISHW | Spanish governmental organization of analysis and study for health and safety conditions in the workplace. [17] | + | - | - |
| 98/24/EC, 2004/37/EC | Occupational - Chemicals and carcinogens concentration. [18,19] | + | - | - |
| ISO/IEC 31010:2019 | Risk management process, based on a iterative cycle. Risk assessment based on identification, analysis and evaluation. General application of (QRA). [4,5,38] | + | - | - |
| PMBOK, PRINCE2 | Documentation tailored forprojects. Design, Start, Direction, Planning, Execution, Control. [39,40] | + | - | - |
| CCPS | Layer of Protection Analysis (LOPA) methodology. A process deviation can lead to a hazardous consequence if not interrupted by an independent protection layer (IPL). Applied in chemical process. [14,41,42,43] | + | - | - |
| NORSOK 2010 | Applied in the Norwegian petroleum industry, under the idea of Operational Risk Assessment, with the aim to follow the lifecycle of a project considering planning, execution and operation. [44,45,46] | + | - | - |
| 2012/18/EUCOMAH 2015 | European and British Control of Major Hazards for Seveso III Directive. Emergency plan withmajor accident prevention policy andinformation mechanism to authorities and population. A 5 years safety report. [47,48] | + | - | - |
| CPR18E | Netherlands advisory council of dangerous substances, and the old (Commissie voor de Preventie van Rampenthat, CPR). Applied in hazardous installations and transport analyzing the loss of containment events and the modeling of the associated flammable clouds, their dispersion and toxic effects. [49] | + | - | - |
| EN 16991:2018 | European standards for chemical, power generation and manufacturing providing guidance for the inspection and risk evaluation in operations and maintenance. [50,51] | + | - | - |
| Models | Application | P | S | I |
|---|---|---|---|---|
| Sequential | Are representative of the Quantitative Risk Assessment (QRA) methodology regarding accidents as outcomes of a chain of discrete events or factors that take place in a temporal order. Analyzing causes and consequences of risk. | + | +/- | - |
| ETA | Event Tree Analysis. Consequence analysis. General application. [14] | + | +/- | - |
| FTA | Fault Tree Analysis. Causes of risks for human and technical systems. Applied in occupational risk analysis in the textile industry. [14,52] | + | +/- | - |
| BOW-TIE | Graphic including FTA and ETA models to represent causes, safety barriers, and consequence events. [14] | + | +/- | - |
| THERP | (Technique for Human Error Rate Prediction) a tool based on event-tree approach for evaluating human errors alone or in connection with equipment functioning, operational procedures and practices. [53] | + | +/- | - |
| FMEA | Failure Mode Effect Analysis. Step-by-step approach for identifying potential failures. [54] | + | +/- | - |
| Check list-What if | Systematic revision to find malfunctions and compliance with a list of requirements. [54] | + | +/- | - |
| FMECA | Failure modes, Effects and Criticality Analysis. Upgrade of the FMEA. The criticality is determined classifying the degree of potential failures. Case application for a toxic exposure to contaminants in a drug industry. [54,55] | + | +/- | - |
| RA | Reliability Assessment. Quantification of the probability of failure in a system. [56] | + | +/- | - |
| Block Diagrams | Graphical procedure describing the function of the system and showing the logical connections of components needed to fulfill a specified system function. [57] | + | +/- | - |
| HAZOP/HAZID | Technique for early identification of hazards usually applied in the design, the study is carried out by an experienced multi-discipline team using a checklist of potential hazards. [58] | + | +/- | - |
| EBM | Energy Barrier Model defining a safety barrier management and considering that an accident occur when hazards succeed to penetrate the safety barriers deficiencies. [59,60] | + | +/- | - |
| MORT | Management Oversight and Risk Tree. Root cause determination. Case for an elevator incident. [61] | + | +/- | - |
| SCAT | Systematic Cause Analysis. Causal analysis using a poster schematic which enables the identification of relevant corrective and preventive actions. [62] | + | +/- | - |
| STEP | Sequential Time Events Plotting. Identification of multiple causes in occupational accidents. [63] | + | +/- | - |
| MTO | Man Technology and Organization. Root causes in occupational work affected by the organization; practice; management; procedures and deficiencies in work environment. [64] | + | +/- | - |
| SOL | Safety through Organizational Learning. Event analysis in two steps: (1) description of the actual event situation, and (2) identification of contributing factors. Applicationin the nuclear industry. [65] | + | +/- | - |
| Epidemiological | Propagation of events is analogous to a disease spreading considering their distribution and determinants. Accidents are caused by latent events under epidemic context. Applicationin helicopter and road accidents. [66,67] | + | +/- | - |
| Models | Application | P | S | I |
|---|---|---|---|---|
| Systematic | General risk framework based on the Rasmussen’s model using control theory concepts and considering that social climate is affected by government policy and budgeting, regulatory associations, organization, staff and the work operation systems for which their limitations and their interactions can allow preconditions for accidents. [68,69] | + | +/- | - |
| AcciMap | Cause event representation of the system interactions and how to control the hazardous processes originated into of the organizational and socio - technical system. [70] | + | +/- | - |
| STAMP | Systems Theoretic Accident Model.The systems are subject to external disturbances and can cause accidents due to physical, social and economic pressures and control failures in safety barriers. Human action supports part or all of the operation and actions of the system. A checklist is applied to identify control failures in safety barriers. [71,72,73] | + | +/- | - |
| CREAM | Cognitive Reliability and Error Analysis Method. Human performance is modeled to asses the consequences of the human errors. [74,75] | + | +/- | - |
| DREAM | Driving Reliability and Error Analysis Method. Application in driving accidents. [76] | + | +/- | - |
| FRAM | Functional Resonance Accident Model. As a result of the functional couplings appears resonance. The functional or basic processes in a risk scenario are identified, defining for each of them what are the inputs needed; the outputs produced; the needed resources (equipment, procedures, energy, materials and manpower); the controls to supervise, the preconditions to be fulfilled to carry the process and the time. The resonance can appear due to the variability in the dependence between processes. Application on aircraft, maritime and manufacturing. [77] | + | +/- | - |
| AEB | Accident Evolution and Barrier Function. Interaction between technical and human-organizational systems which may lead to an accident. The analysis needs work-team by engineers and human accidents specialists. [78] | + | +/- | - |
| Cloud based | Based on the FMECA . Perform a critical risk analysis based on the cloud by establishing a score based on expert knowledge. A case is presented for a gasification station. [79] | + | +/- | - |
| Fuzzy based | Application of fuzzy logical for define human behavior in risk situations. | + | +/- | - |
| HEART | Human Error and Assessment Technique.The reliability of any task can be modified by the influence of the Error Promotion Conditions (EPC). It is necessary to previously identify the tasks. For each task, with the help of a team of experts, a probability value of human error generation and the (EPC) that affect it and its relevance are defined. Fuzzy logic is applied to obtain a factor that modifies the probability of error. [53,80] | + | +/- | - |
| CREAM-BN | Upgrade of the systemic CREAM model.Human behavior has five components: strategic, tactical, opportunistic and scrambled. It is affected by common performance conditions (CPC) defined as: adequacy of the organization, working conditions, human-machine interface, operational support, availability of procedures, number of simultaneous objectives, available time, time of day, training and experience and quality collaboration. A Bayesian network and fuzzy logic are applied to determine the probability of human error. Scramble and opportunistic are the ones with the highest probability. Cases and examples from nuclear industry, aircraft transportation, manufacturing, retail and chemicals. [81] | + | +/- | - |
| Formal based | Accident causation is approached using probabilistic schemes and Bayesian networks to model the interaction between causes and effects. | |||
| WBA | Why Because Analysis. Bayesian networks are applied considering that each component is a system is affected from the overall system environment. Application in transportation and aircraft accidents [82] | + | +/- | - |
| Safety Barrier | ||||
| PHPAM | Process Hazard Prevention Accident Models. Accidents are initiated by hydrocarbon release and propagation, and it is needed to establish safety barriers into five groups of prevention: release, ignition, escalation, harm and loss. Risk probabilities are evaluated before and after barriers implementation. [83] | + | +/- | - |
| SHIPP | System Hazard Identification Prediction and Prevention.Update of the initial probability of risk according to the actual data collected and application of Bayesian inference. [84,85] | + | + | - |
| Models | Application | P | S | I |
|---|---|---|---|---|
| Dynamic | Uses sequential models and the Bow-tie graph approach, performing a Bayesian inference analysis to update the failure probabilities from the information collected of the accident precursors. | + | + | - |
| DyPASI | Dynamic Procedure for Atypical Scenarios Identification. Identification and assessment of the potential hazards based on information from atypical accident scenarios or situations, which are not captured by conventional HAZOP/HAZID techniques. [104,105] | + | + | - |
| Dynamic Risk Analysis | Analysis process as a step of the Dynamic Risk Assessment methodology being a quantitative modern approach in which the frequency of accidents are updated by the application of the Bayesian theory. [106] | + | + | - |
| Risk Barometer | For continuously monitor the risk of failure in safety barriers based on an existing Quantitative Risk Assessment (QRA) or a Dynamic Risk Assessment (DRA) and on the Barrier and Operational Risk Analysis (BORA). The safety barriers are analyzed through influencing factors, named Risk Influencing Factors, (RIFs), that are correlated to with theestimated probabilities of failure, followed by their visualization in an equivalent barometer graph. [107] | + | + | - |
| Dynamic Operational Risk Assessment | Markov and MonteCarlo chain simulations applied to analyze the incidence of events and causes in each component of a system process and its behavior. The method simulates the visits in each of the four states in which they can be found: normal operation; abnormal not detected; abnormal detected and under repair. [108] | + | + | - |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Folch-Calvo, M.; Brocal, F.; Sebastián, M.A. New Risk Methodology Based on Control Charts to Assess Occupational Risks in Manufacturing Processes. Materials 2019, 12, 3722. https://doi.org/10.3390/ma12223722
Folch-Calvo M, Brocal F, Sebastián MA. New Risk Methodology Based on Control Charts to Assess Occupational Risks in Manufacturing Processes. Materials. 2019; 12(22):3722. https://doi.org/10.3390/ma12223722
Chicago/Turabian StyleFolch-Calvo, Martin, Francisco Brocal, and Miguel A. Sebastián. 2019. "New Risk Methodology Based on Control Charts to Assess Occupational Risks in Manufacturing Processes" Materials 12, no. 22: 3722. https://doi.org/10.3390/ma12223722
APA StyleFolch-Calvo, M., Brocal, F., & Sebastián, M. A. (2019). New Risk Methodology Based on Control Charts to Assess Occupational Risks in Manufacturing Processes. Materials, 12(22), 3722. https://doi.org/10.3390/ma12223722