1. Introduction
Structures made of functionally graded materials (FGM) are advantageous for many applications. A difficulty with theoretical analysis and design is that structures made of FGM are classified by a much greater number of parameters than similar structures made of homogeneous materials. For this reason, it is desirable to perform parametric studies by analytic or semi-analytic methods as much as possible. A review of results related to the analysis of FGM and published before 2007 is presented in [
1]. This review focuses on structures with through-thickness variation of material properties. Analytic solutions derived in [
1,
2,
3,
4,
5] belong to this class of FGM as well. In [
2,
3,
4], elastic and elastic/plastic spherical vessels subjected to various loading conditions are considered. Thermo-elastic simply supported and clamped circular plates are studied in [
5]. Many analytic and semi-analytic solutions are available for FGM discs and cylinders assuming that material properties vary in the radial direction but are independent of the circumferential and axial directions. Purely elastic solutions for a hollow disc or cylinder subjected to internal or/and external pressure are derived in [
6,
7,
8]. An axisymmetric thermo-elastic solution for a hollow cylinder subjected quite a general system of thermo-mechanical loading is presented in [
9]. It is assumed that the temperature varies along the radial coordinate. A plane strain analytic elastic/plastic solution for pressurized tubes is found in [
10]. The solution is based on the Tresca yield criterion. Many solutions are proposed for functionally graded solid and hollow rotating discs. Purely elastic solutions for solid discs of constant thickness are given in [
11,
12], a purely elastic solution for a hollow disc of variable thickness in [
13], a purely elastic solution for hollow polar orthotropic discs in [
14], and a solution for hollow cylinders using the theory of electrothermoelasticity in [
15]. An elastic perfectly plastic stress solution for hollow discs is derived in [
16] using the von Mises yield criterion.
All of the aforementioned solutions deal with infinitesimal strain. A distinguished feature of the solution provided in the present paper is that strains are large. The process considered is pure bending of a FGM sheet under plane strain conditions. A review on bending of functionally graded sheets and beams at infinitesimal strains is given in [
17]. The present solution is based on the approach proposed in [
18]. It is shown in this paper that the use of Lagrangian coordinates facilitates the solution. Moreover, the equations describing kinematics can be solved independently of stress equations in the case of isotropic incompressible material. This is an advantage as compared to the classic approach developed in [
19] where the stress equations are solved first. The classic approach is restricted to perfectly plastic materials, whereas the mapping in Equation (
1) is valid for a large class of constitutive equations. The approach proposed in [
18] has already been successfully extended to more general constitutive equations in [
20,
21,
22,
23]. It is shown in the present paper that the approach is also efficient for FGM sheets. It is worth noting that a rigid plastic solution for pure bending of laminated sheets (such sheets can also be referred to as functionally graded sheets) at large strain is given in [
24].
2. Basic Equations
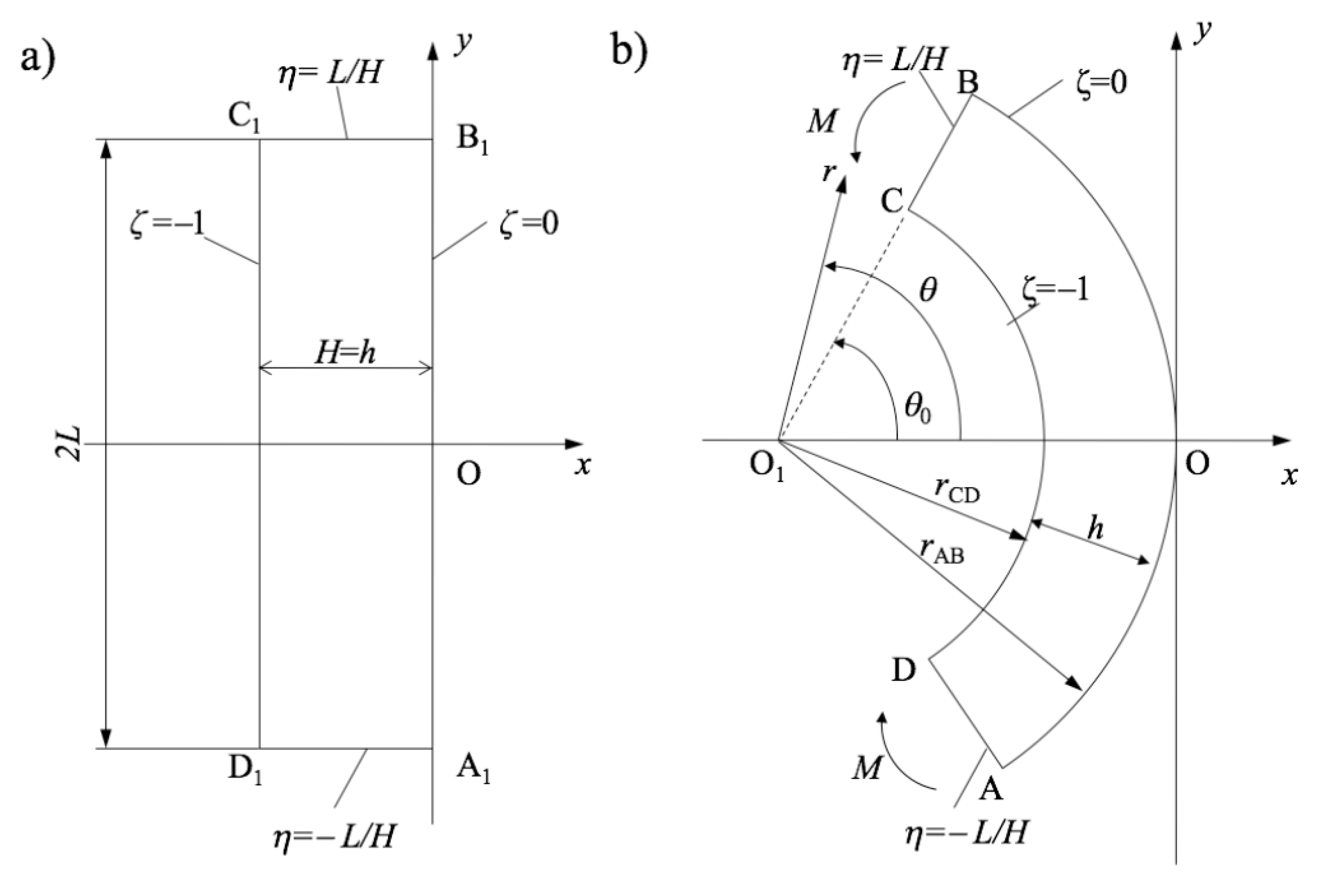
The process of plane strain pure bending is illustrated in
Figure 1. The approach proposed in [
18] for solving the corresponding boundary value problem is based on the following transformation equations:
where
is an Eulerian–Cartesian coordinate system and
is a Lagrangian coordinate system. Without loss of generality, it is possible to assume that the origin of the Cartesian coordinate system is located at the intersection of the axis of symmetry of the process and the outer surface
and that the x-axis coincides with the axis of symmetry. The Lagrangian coordinate system is chosen such that
at the initial instant where
H is the initial thickness of the sheet. It is evident from these relations and the geometry in
Figure 1 that
on AB,
on CD,
on CB and
on AD throughout the process of deformation. Here,
L is the initial width of the sheet. In Equation (
1),
a is a time-like variable. In particular,
at the initial instant. In Equation (
1),
s is a function of
a. This function should be found from the stress solution and therefore depends on constitutive equations. The condition in Equation (
2) is satisfied if
at
. It is possible to verify by inspection that the mapping in Equation (
1) satisfies the equation of incompressibility. Moreover, this mapping transforms initially straight lines
and
into circular arcs AB and CD and initially straight lines
and
into circular arcs CB and AD after any amount of deformation (
Figure 1). Furthermore, coordinate curves of the Lagrangian coordinate system coincide with trajectories of the principal strain rates and, for coaxial models, with trajectories of the principal stresses. Thus, the shear stress vanishes in the Lagrangian coordinates. In particular, the contour ABCD is free of shear stresses. Let
and
be the physical stress components referred to the Lagrangian coordinates. The stress solution should satisfy the boundary conditions
for
and
. The only non-trivial equilibrium equation in the Lagrangian coordinates has been derived in [
18] as
The initial plane strain yield criterion of the functionally graded sheet is supposed to be
where
is a material constant and
is an arbitrary function of its argument. It is assumed that material properties are not affected by plastic deformation. Therefore, Equation (
6) can be rewritten in the form
In this case, the yield locus is invariant along the motion. The importance of this property of material models has been emphasized in [
25]. Let
and
be the deviatoric portions of
and
, respectively. Since the material is incompressible,
under plane strain conditions. Then, the yield criterion in Equation (
7) is equivalent to
Hooke’s law generalized on functionally graded materials reads
It has been taken into account here that Poisson’s ratio is equal to 1/2 for incompressible materials. In addition, and are the total strain components in elastic regions and the elastic portions of the total strain components in plastic regions referred to the Lagrangian coordinate system, is a material constant and is an arbitrary function of its argument.
Geometric parameters shown in
Figure 1 depend on
a and are expressed as [
18]
Once
s has been found as a function of
a, these parameters are immediate from Equation (
10).
3. Stress Solution at Loading
It is assumed that the functions
and
involved in Equations (
7) and (
9) are such that plastic yielding can only initiate at
or
. This assumption can be verified using the purely elastic solution with no difficulty. At the very beginning of the process, the entire sheet is elastic. As deformation proceeds, one of the following three cases arises: (i) plastic yielding initiates at the surface
; (ii) plastic yielding initiates at the surface
; and (iii) plastic yielding initiates simultaneously at the surfaces
and
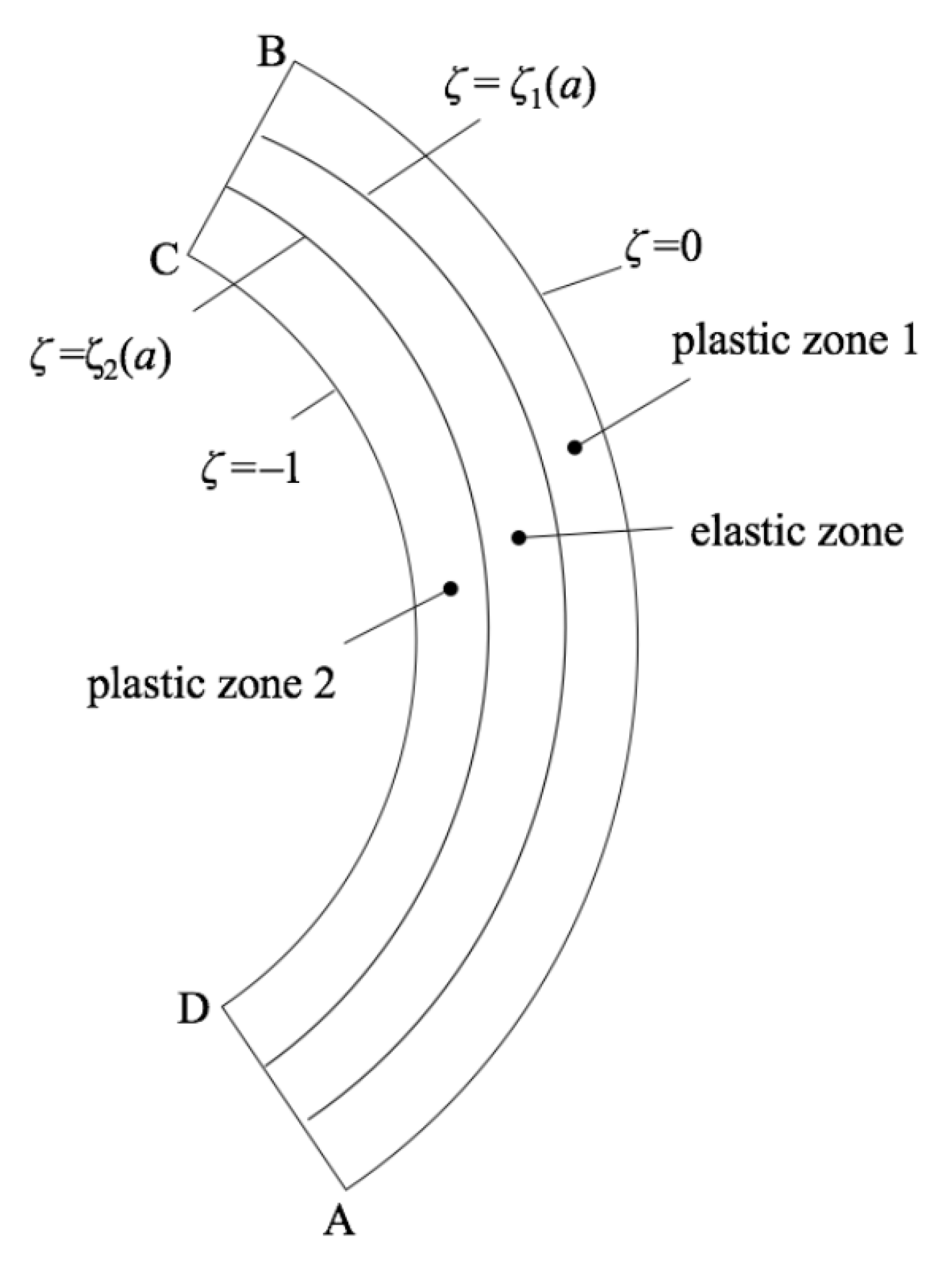
. These cases should be treated separately. In the following,
is the elastic/plastic boundary between the plastic region that propagates from the surface
and the elastic region and
is the elastic/plastic boundary between the plastic region that propagates from the surface
and the elastic region. It is evident that both
and
depend on
a. The general structure of the solution with two plastic regions is illustrated in
Figure 2. Let
M be the bending moment. Then, its dimensionless representation is in terms of the Lagrangian coordinates given by [
18]
In the elastic region, the whole strain is elastic. Therefore, it follows from Equation (
1) that the principal logarithmic strains are
Since
, Equations (
5) and (
9) combine to give
Eliminating the strain components in Equation (
13) by means of Equation (
12) results in
Integrating this equation with respect to
and using the boundary condition in Equation (
4) at
leads to
where
and
is a dummy variable of integration. The expression for
in Equation (
15) has been derived using the identity
, and Equations (
9) and (
12). In the case of the purely elastic solution, Equation (
15) must satisfy the boundary condition in Equation (
4) at
. Then, the equation for the function s(a) is
Using Equation (
15), in which
s should be eliminated by means of the solution of Equation (
16), and the yield criterion in Equation (
8), it is possible to determine which of the three cases mentioned above occurs for given material properties. Simultaneously, the value of
a at which plastic yielding initiates is determined. This value of
a is denoted as
. In the following, it is assumed that
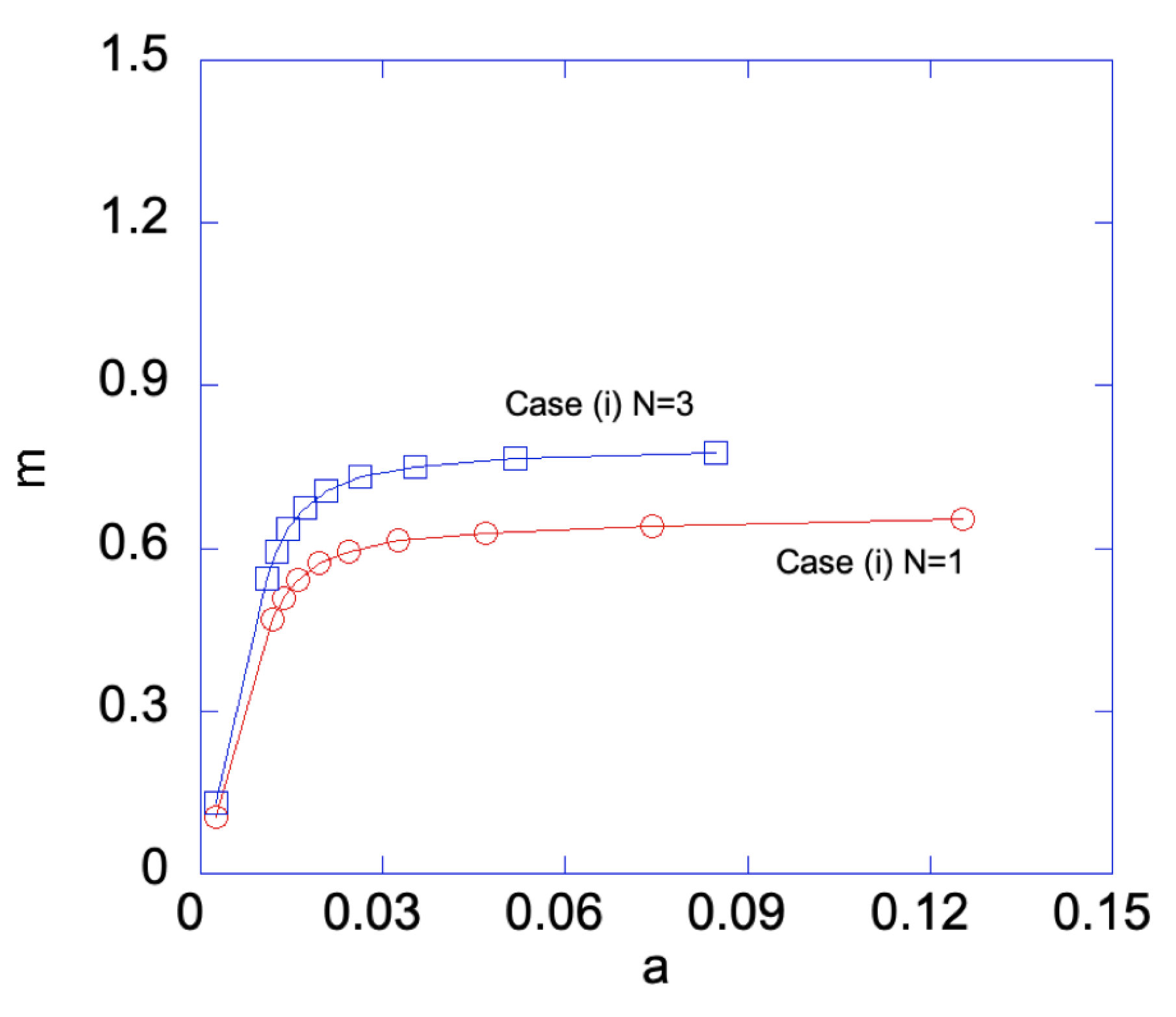
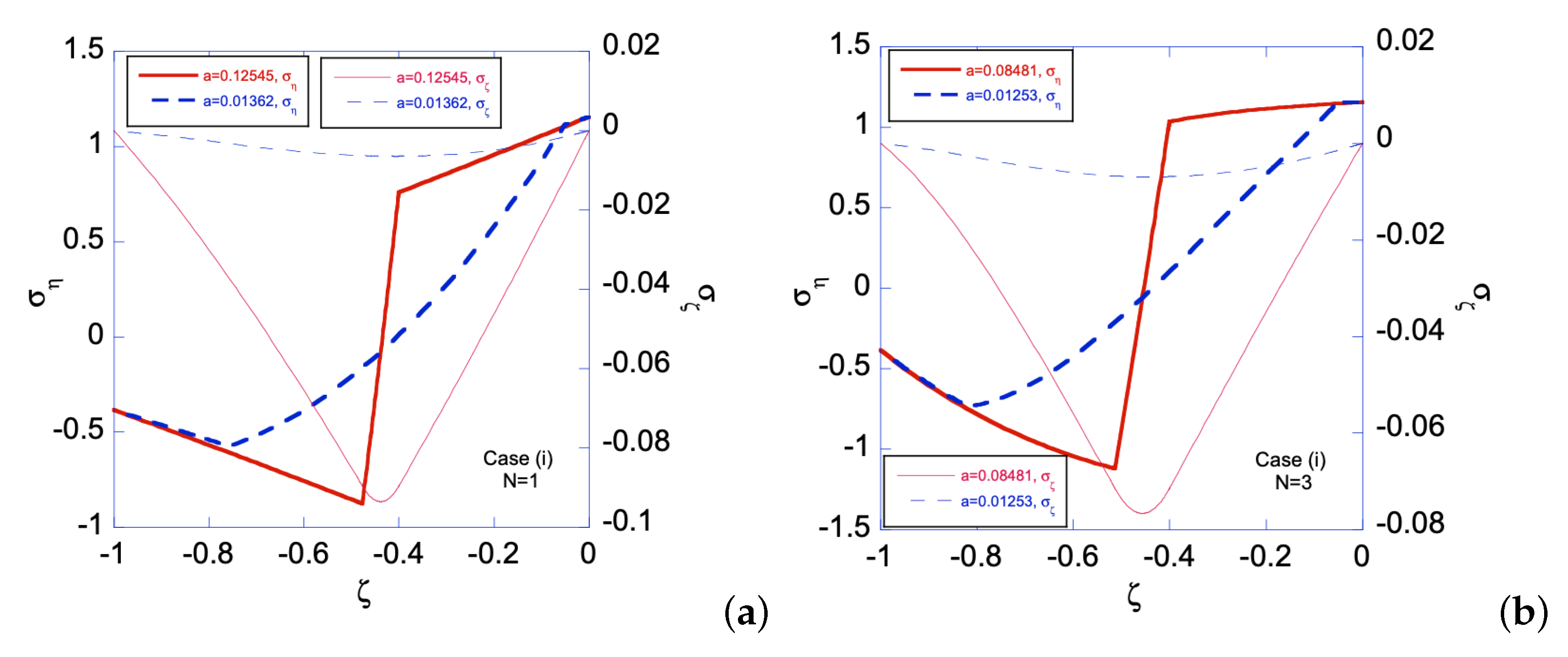
. It is now necessary to consider Cases (i), (ii) and (iii) separately.
Case (i). There are two regions. A plastic region occupies the domain
and an elastic region the domain
. Equation (
15) is valid in the elastic region. However, the function
is not determined from Equation (
16). It is reasonable to assume that
in the plastic region. Therefore, the yield criterion in Equation (
7) becomes
Substituting Equation (
17) into Equation (
5) and integrating yields the dependence of the stress
on
. Using Equation (
17) again provides the dependence of the stress
on
. As a result,
It is evident that this solution satisfies the boundary condition in Equation (
4) at
. Both
and
should be continuous across
. Consequently,
is continuous across
. The stress
on the elastic side of the elastic/plastic boundary is determined from Equation (
15) and on the plastic side from Equation (
8). Then, the condition of continuity of
across the surface
is represented as
Solving this equation for
s yields
Using Equations (
15) and (
18), the condition of continuity of
across the surface
is represented as
In this equation,
s can be eliminated by means of Equation (
20). The resulting equation should be solved numerically to find
as a function of
a. Then,
s as a function of
a is readily found from Equation (
20). The yield criterion should be checked in the elastic region using the solution in Equation (
15). The calculation should be stopped when the yield condition is satisfied at one point of the elastic region. Denote the corresponding value of
a as
.
In Case (i), Equation (
11) becomes
In the first integrand,
should be eliminated by means of Equation (
18) and in the second by means of Equation (
15).
Case (ii). There are two regions. A plastic region occupies the domain
and an elastic region the domain
. The elastic solution in Equation (
15) satisfies the boundary condition in Equation (
4) at
. Therefore, it is convenient to rewrite this solution as
The elastic solution in this form satisfies the boundary condition in Equation (
4) at
. It is reasonable to assume that
in the plastic region. Therefore, the yield criterion in Equation (
7) becomes
Substituting Equation (
24) into Equation (
5) and integrating yields the dependence of the stress
on
. Using Equation (
24) again provides the dependence of the stress
on
. As a result,
It is evident that this solution satisfies the boundary condition in Equation (
4) at
. Both
and
should be continuous across
. Consequently,
is continuous across
. The stress
on the elastic side of the elastic/plastic boundary is determined from Equation (
23) and on the plastic side from Equation (
8). Then, the condition of continuity of
across the surface
is represented as
Solving this equation for
s yields
Using Equations (
23) and (
25), the condition of continuity of
across the surface
is represented as
In this equation,
s can be eliminated by means of Equation (
27). The resulting equation should be solved numerically to find
as a function of
a. Then,
s as a function of
a is readily found from Equation (
27). The yield criterion should be checked in the elastic region using the solution in Equation (
23). The calculation should be stopped when the yield condition is satisfied at one point of the elastic region. Denote the corresponding value of
a as
.
In Case (ii), Equation (
11) becomes
In the first integrand,
should be eliminated by means of Equation (
23) and in the second by means of Equation (
25).
Case (iii). In this case, there are two plastic regions,
and
, and one elastic region,
. At the beginning of this stage of the process,
and
or
and
. Let
be the value of
at
and
be the value of
at
. Then, the elastic solution in Equation (
15) can be rewritten as
It follows from this solution that
The solution in Equation (
18) is valid in the plastic region
and the solution in Equation (
25) in the plastic region
. Then,
and
Equations (
20) and (
27) are valid. Therefore,
and
Equations (
31)–(
33) combine to give
Eliminating in this equation
s by means of Equation (
20) or Equation (
27) and then
a by means of Equation (
35) supplies the equation to find
as a function of
(or
as a function of
). Then,
a as a function of
(or
) is found from Equation (
35) and
s as a function of
(or
) from Equation (
20) or (
27). The distribution of the stresses is determined from Equation (
30) with the use of Equations (
32) and (
33) in the elastic region, from Equation (
18) in the region
and from Equation (
25) in the region
.
In Case (iii), Equation (
11) becomes
In the first integrand,
should be eliminated by means of Equation (
18), in the second by means of Equation (
30) and the third by means of Equation (
25). As usual, it is necessary to verify that the yield criterion is not violated in the elastic region.
4. Unloading
It is assumed that unloading is purely elastic. This assumption should be verified a posteriori. At this stage of the process, the strains can be considered as infinitesimal. Let
and
be the values of
a and
s, respectively, at the end of loading. These values are known from the solution given in the previous section. Using Equation (
10), the values of
and
at the end of loading,
and
, are determined as
It is convenient to introduce a polar coordinate system
with the origin at
and
(point
in
Figure 1). The coordinate curves of this coordinate system coincide with the coordinate curves of the
-coordinate system. Therefore,
and
where
and
are the normal stresses in the polar coordinate system. Moreover,
at
and
at
. The equilibrium equation for the increment of the stresses,
and
, in the polar coordinate system can be written as
where
. Since
at
and
at any stage of the process, the increment of this stress should satisfy the conditions
for
and
.
The displacement components from the configuration corresponding to the end of loading in the polar coordinate system are supposed to be
where
and
are dimensionless constants. Using Equation (
41), the increment of the normal strains in the polar coordinate system is determined as
The increment of the deviatoric stresses is found from Equation (
42) and the Hooke’s law (Equation (
9)) where the stresses and strains should be replaced with the corresponding increments. Then,
Using this solution, the right hand side of Equation (
36) can be rewritten as
The Lagrangian coordinate
at the end of loading is expressed in terms of
as [
18]
Using this equation, it is possible to eliminate
in Equation (
44). Then, substituting Equation (
44) into Equation (
39) and integrating gives
It is evident that this solution satisfies the boundary condition in Equation (
40) at
(or
). The other boundary conditions in Equations (
40) and (
46) combine to yield
Solving this equation for
results in
Using Equations (
43) and (
46), it is possible to represent the distribution of
as
The constant
can be eliminated in Equations (
46) and (
49) by means of Equation (
48). It is then obvious that both
and
are proportional to
. The distribution of the residual stresses follows from Equations (
46) and (
49) in the form
As before,
should be eliminated by means of Equation (
45) and
by means of Equation (
48). The constant
remains to be found. To this end, it is necessary to use the condition that the bending moment vanishes at the end of unloading. Using Equations (
11) and (
45), this condition can be represented as
This equation should be solved for
numerically. Then, Equation (
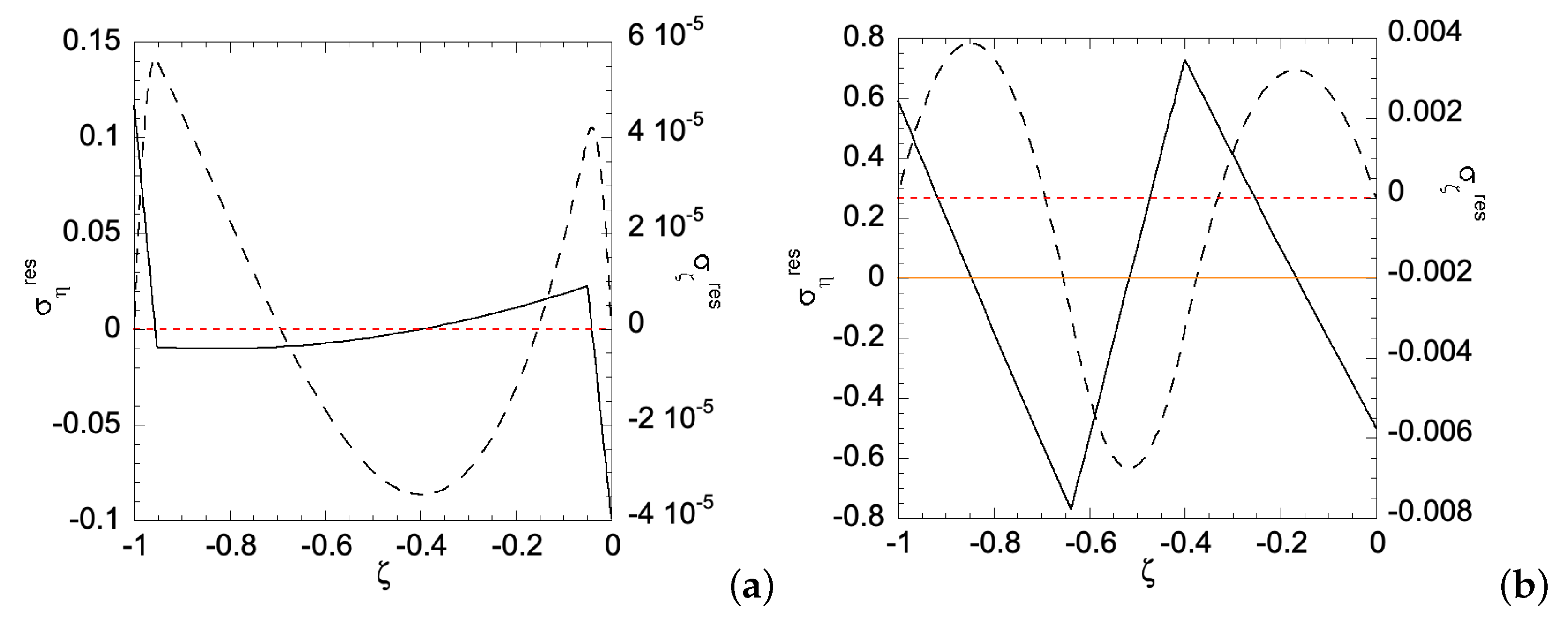
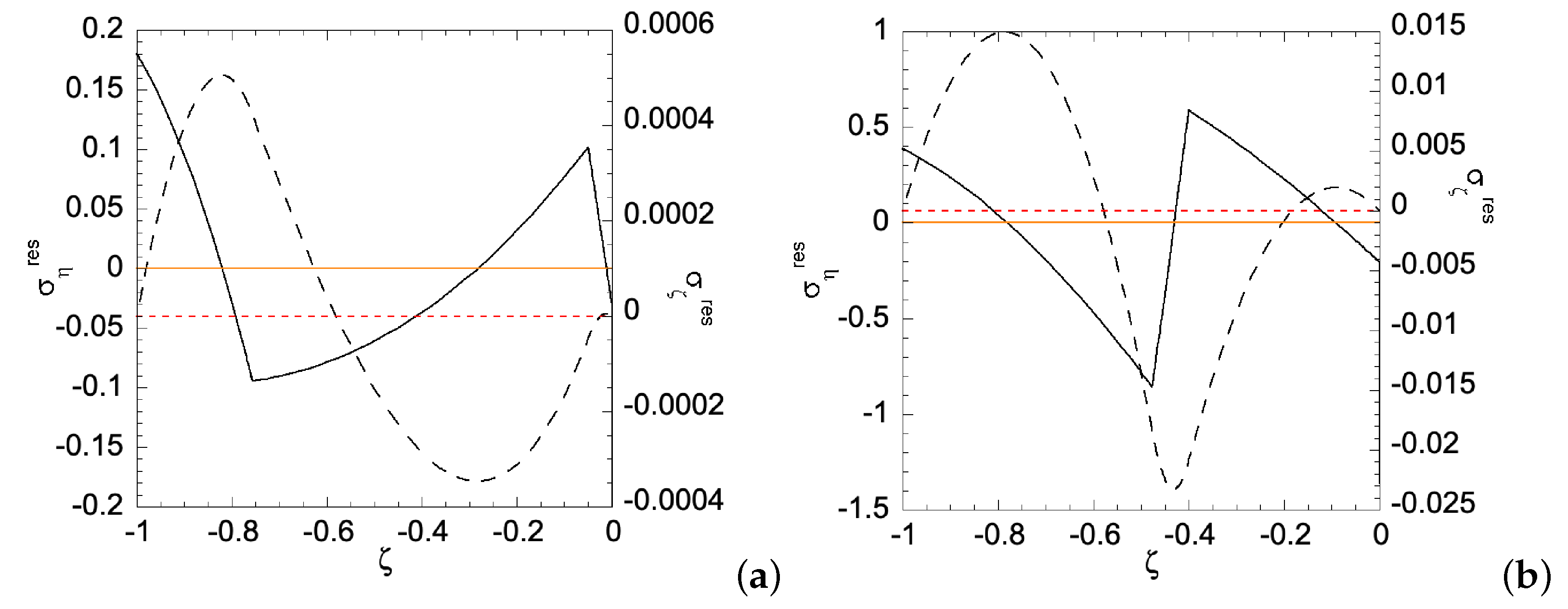
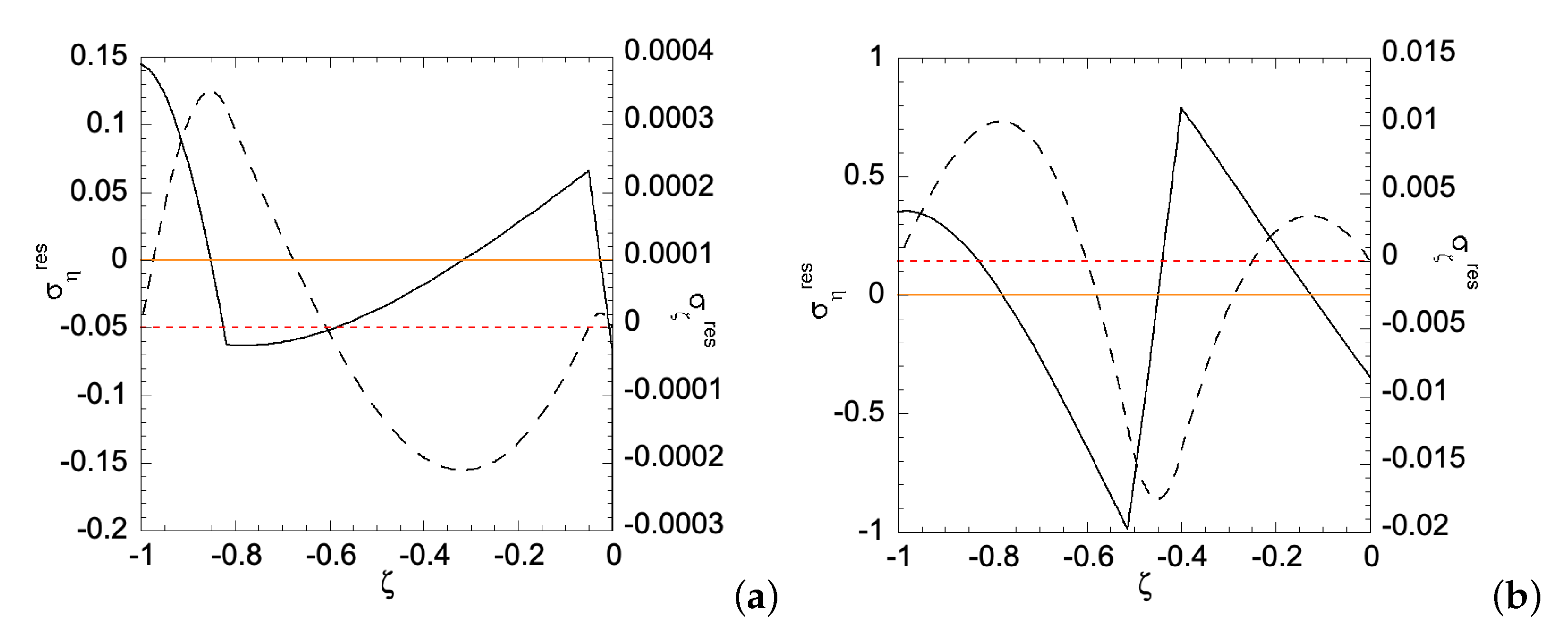
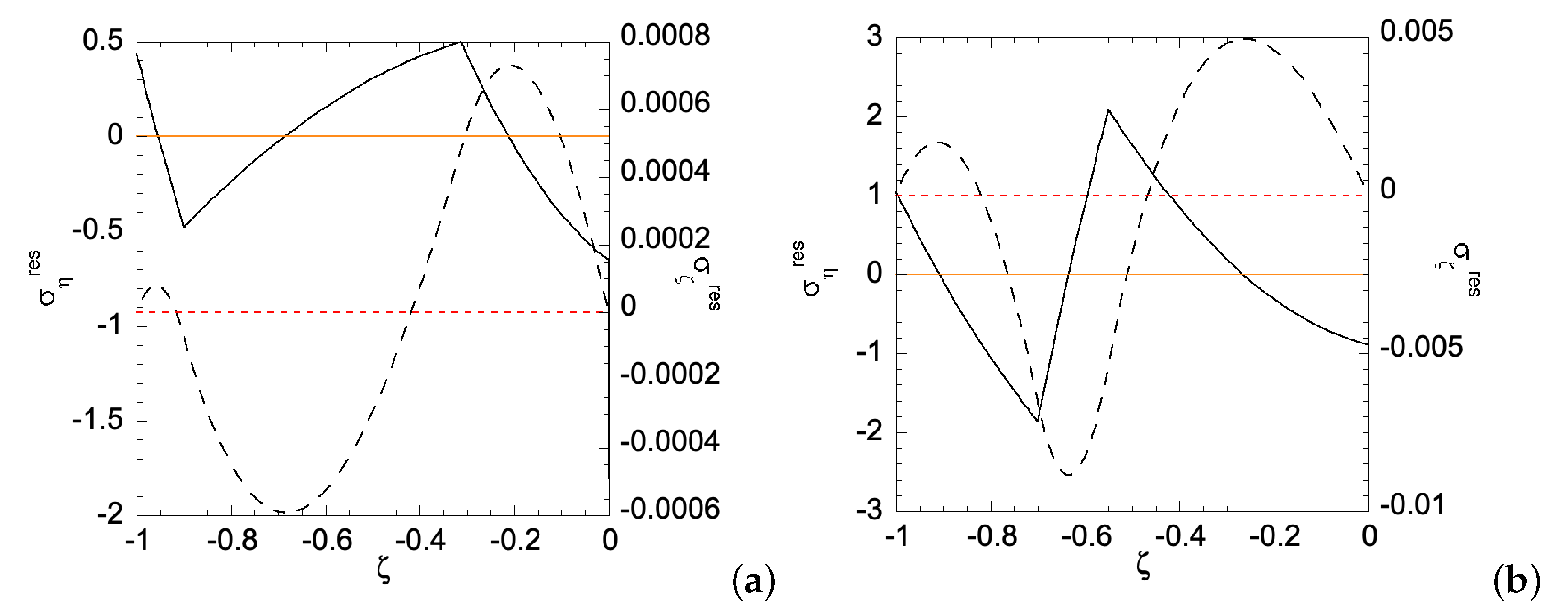
50) supplies the distribution of the residual stresses. To verify that the solution given in
Section 4 is valid, this distribution should be substituted into the yield criterion in Equation (
7) where
and
should be replaced with
and
, respectively. The left-hand side of Equation (
7) should be less than or equal to
in the range
.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}