Modeling of Magnetorheological Elastomers Using the Elastic–Plastic Model with Kinematic Hardening


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Magnetoreheological Elastomer and Specimens
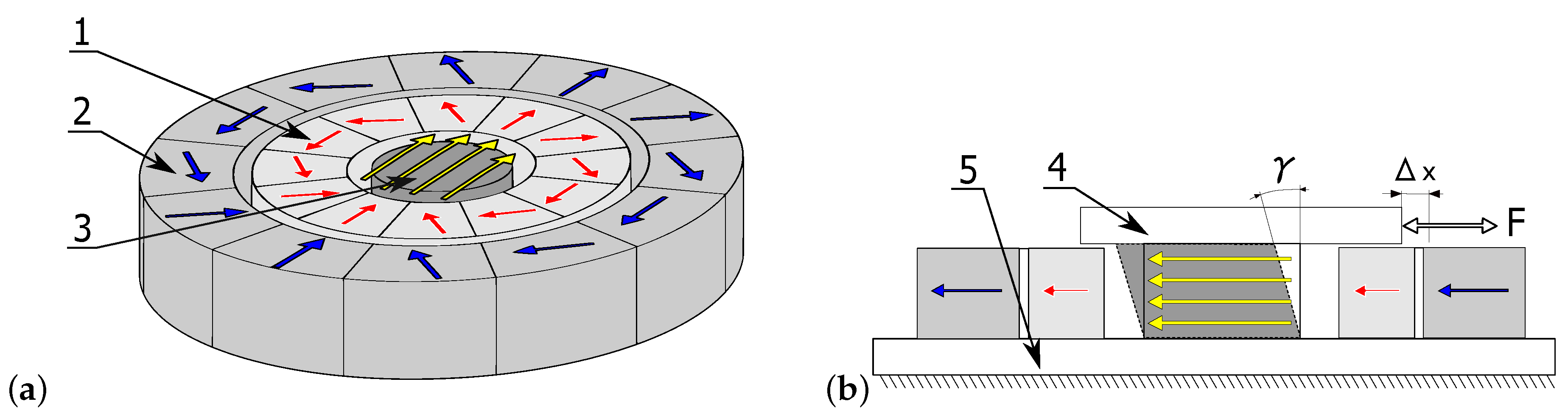
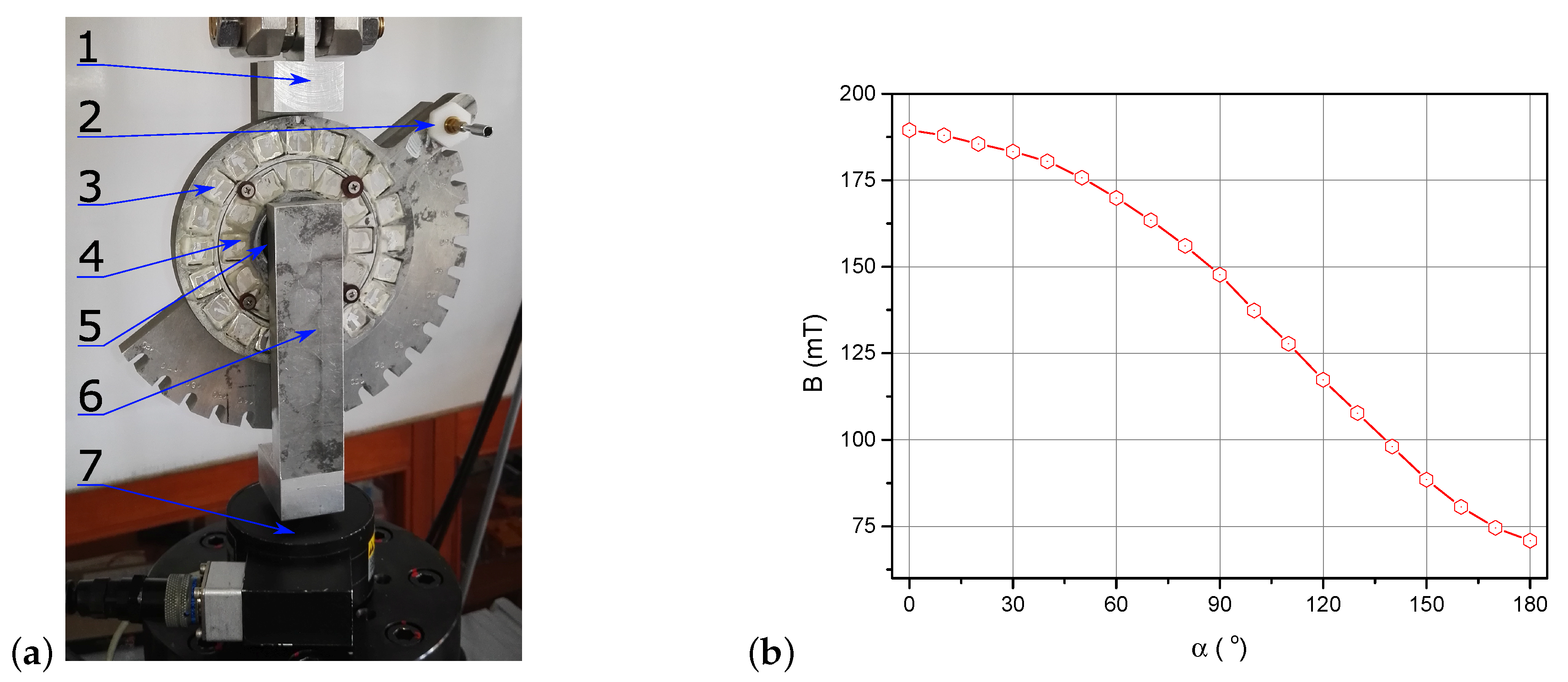
3. Test Stand and Magnetic Field Stimulation
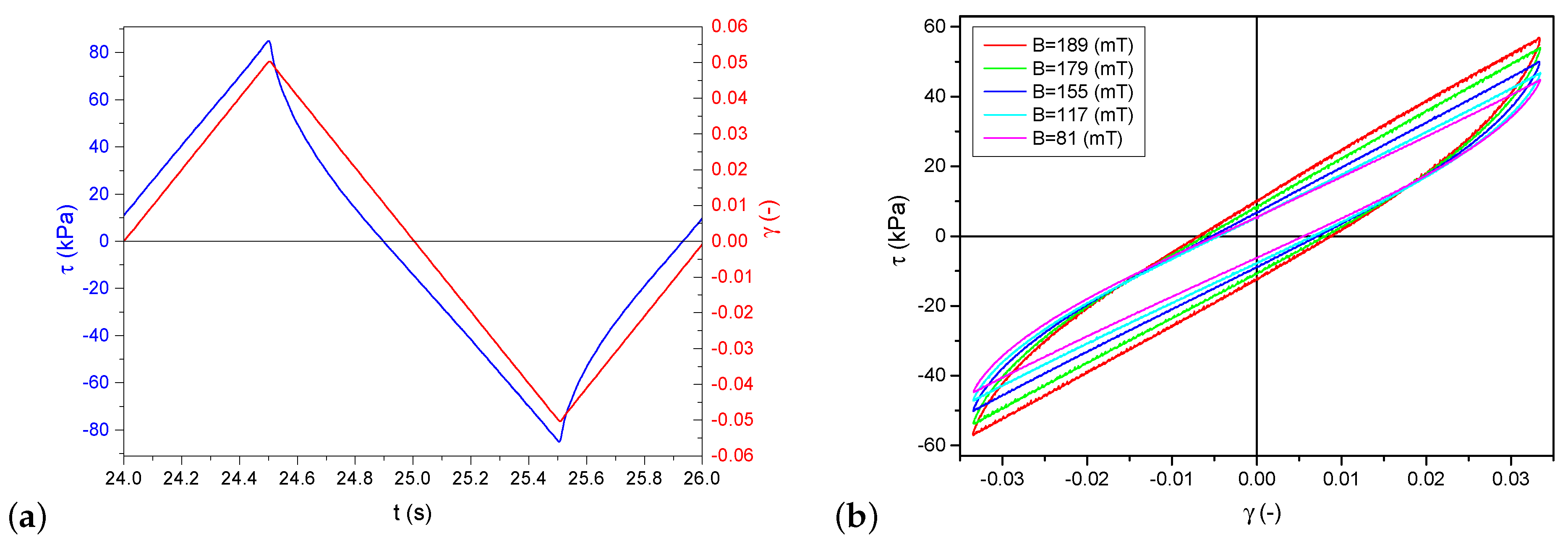
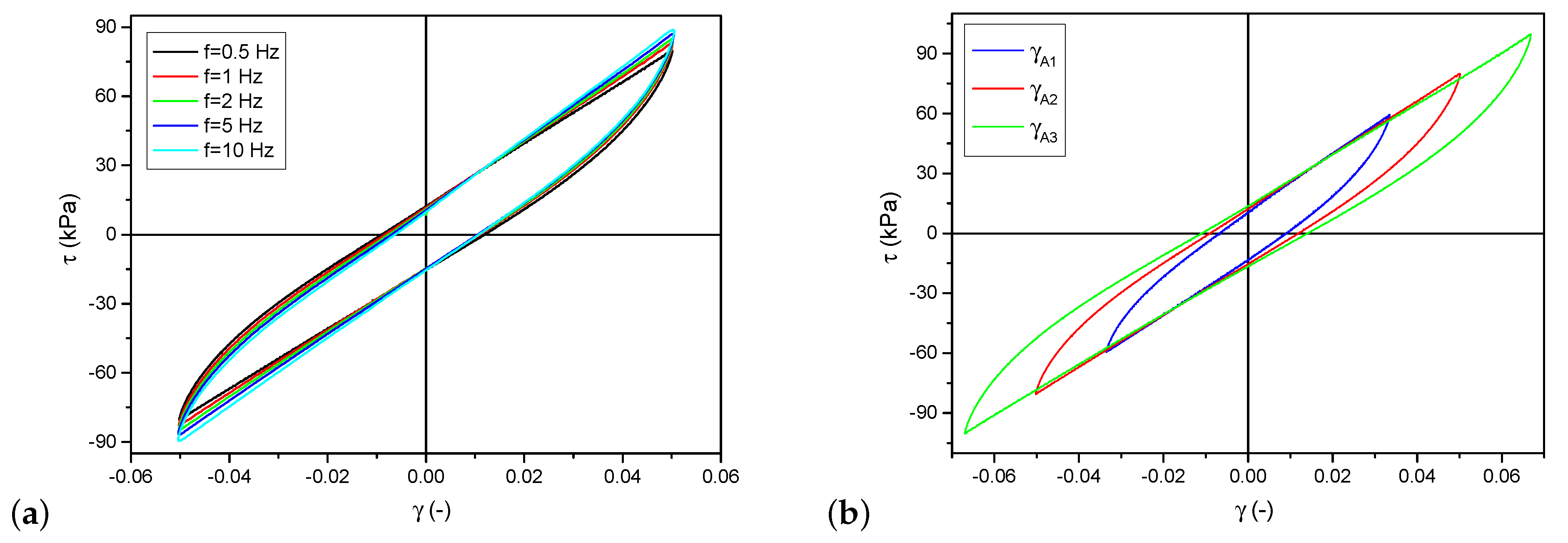
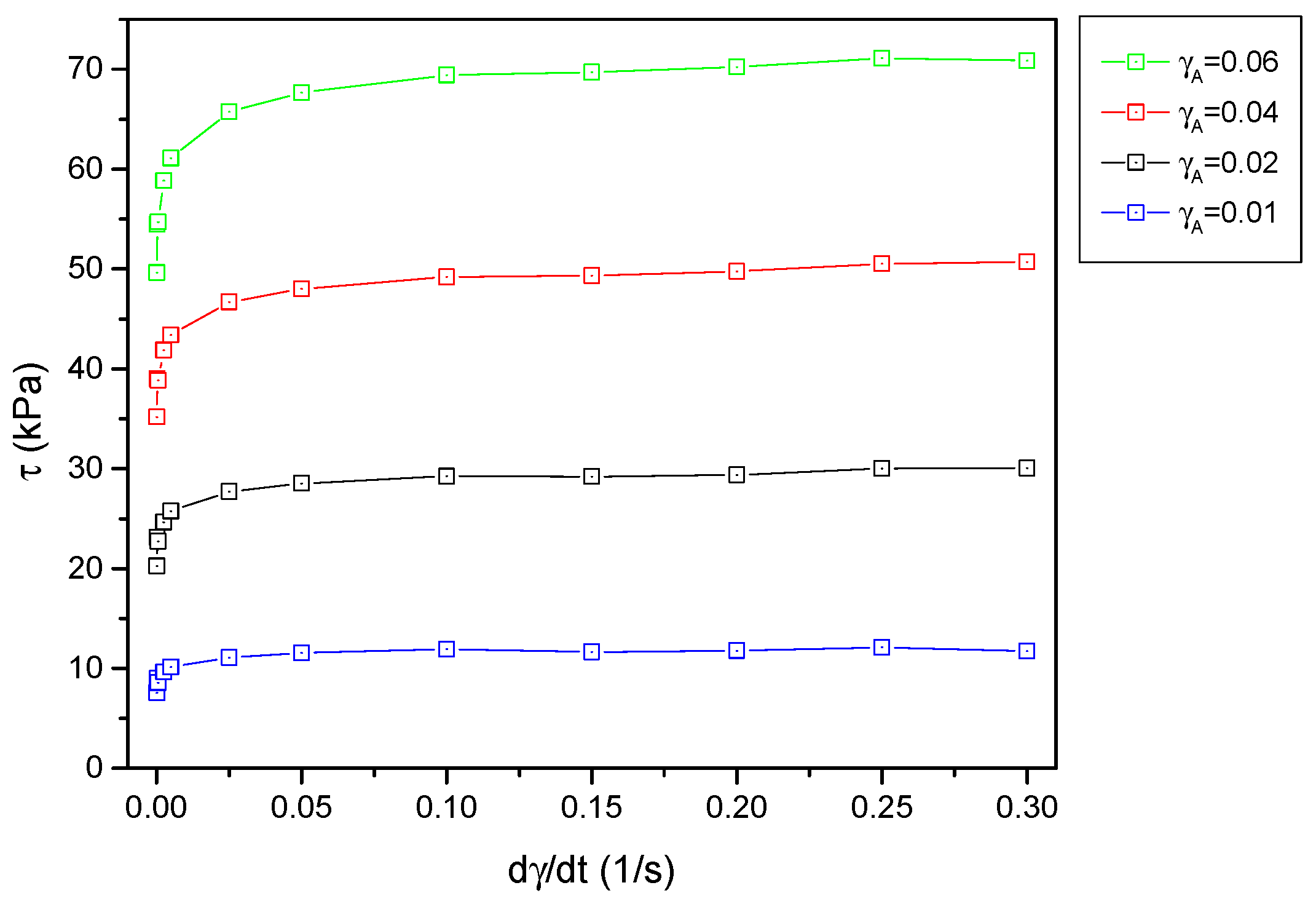
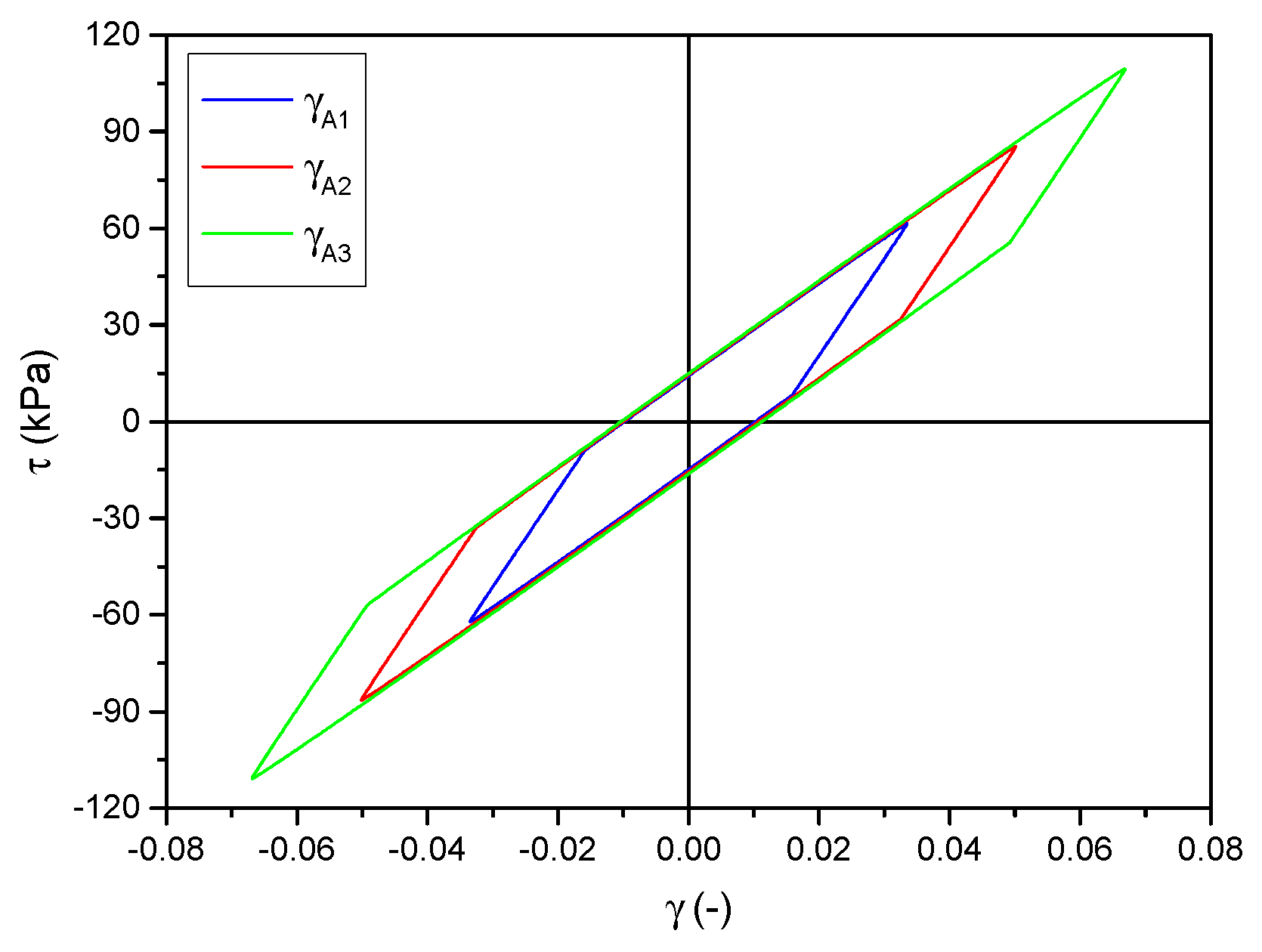
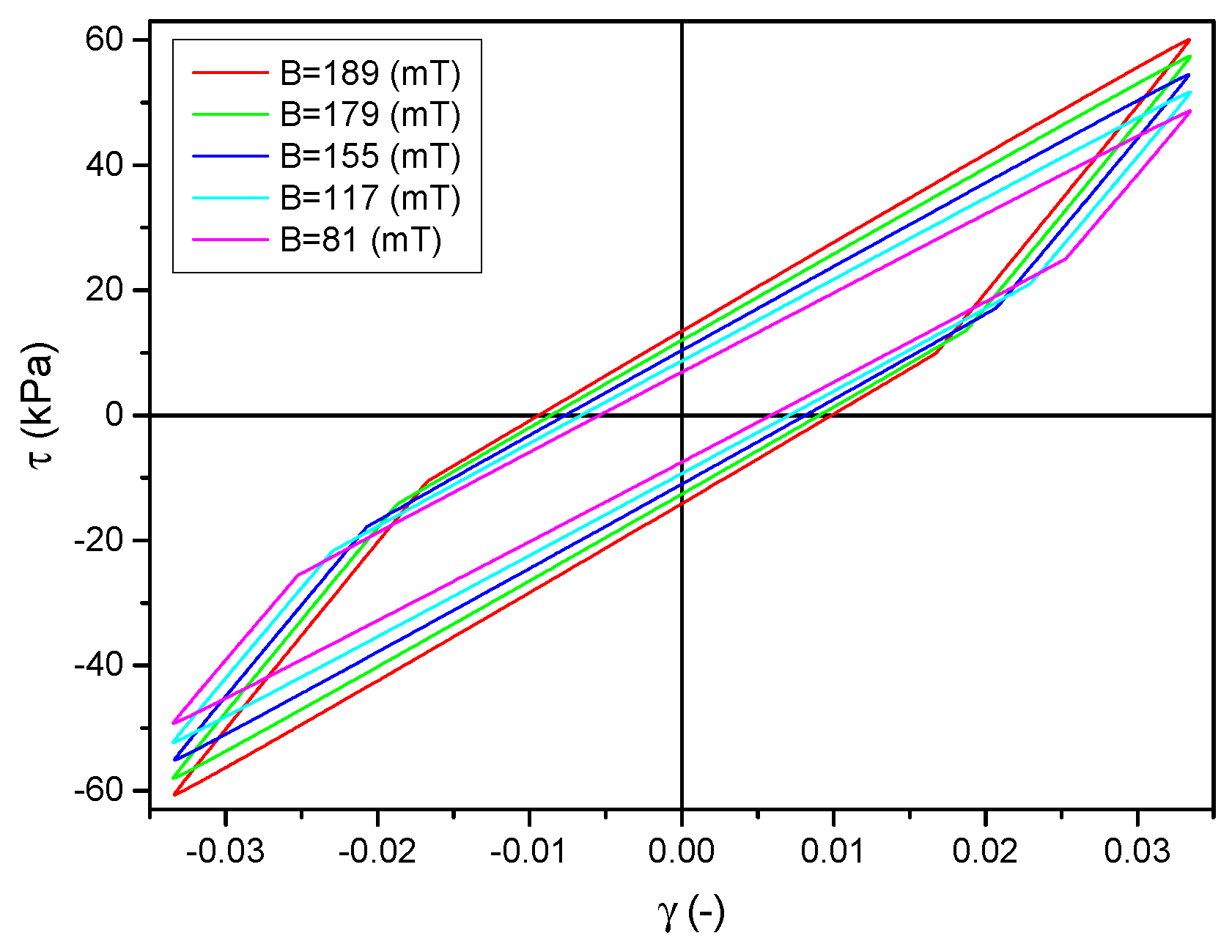
4. Experimental Data
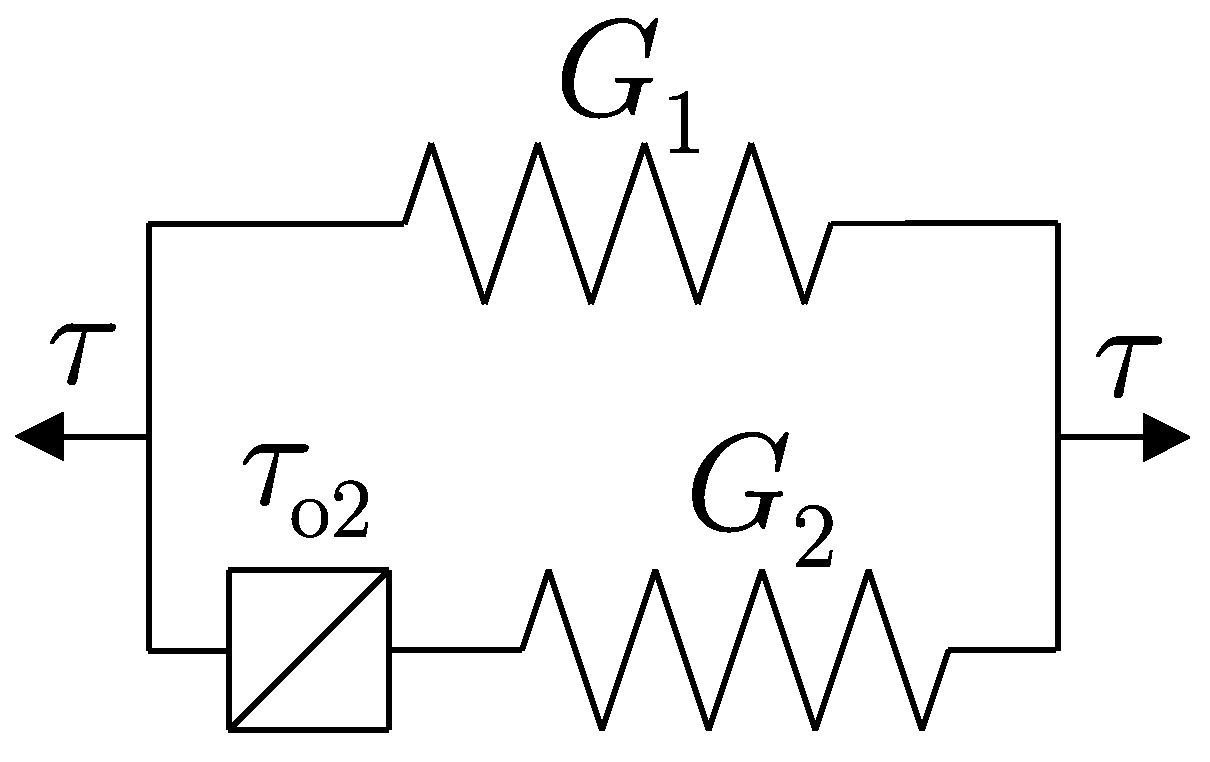
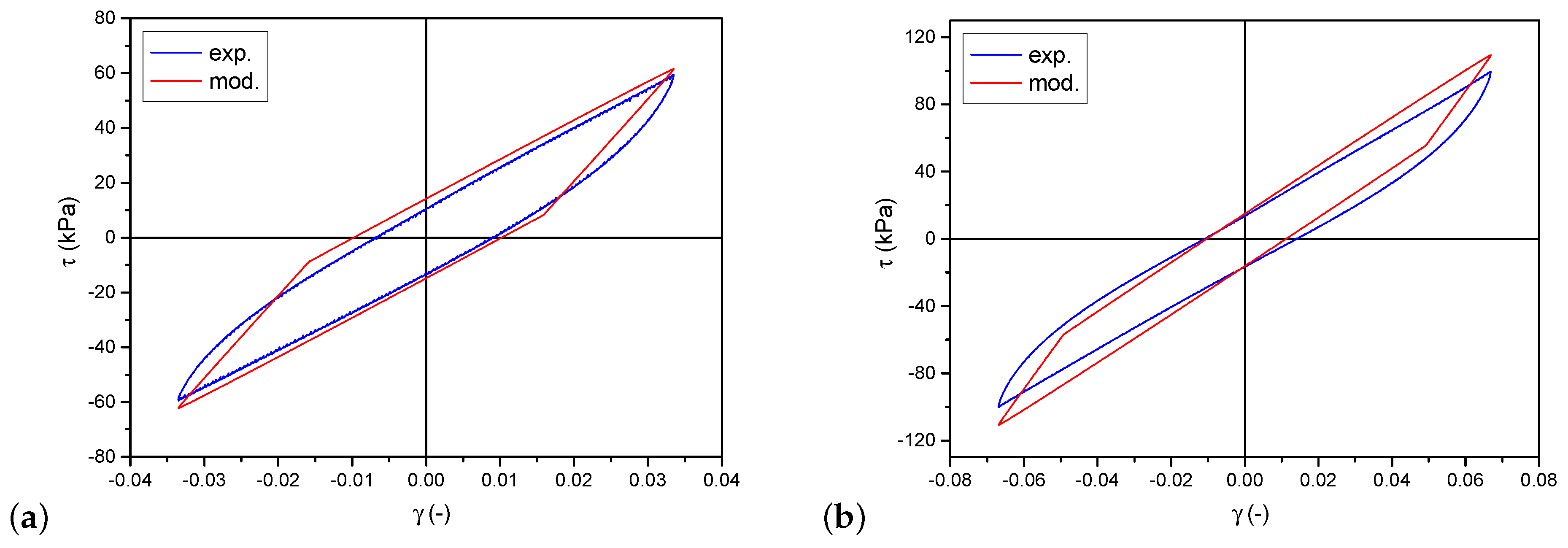
5. Selection of Material Model
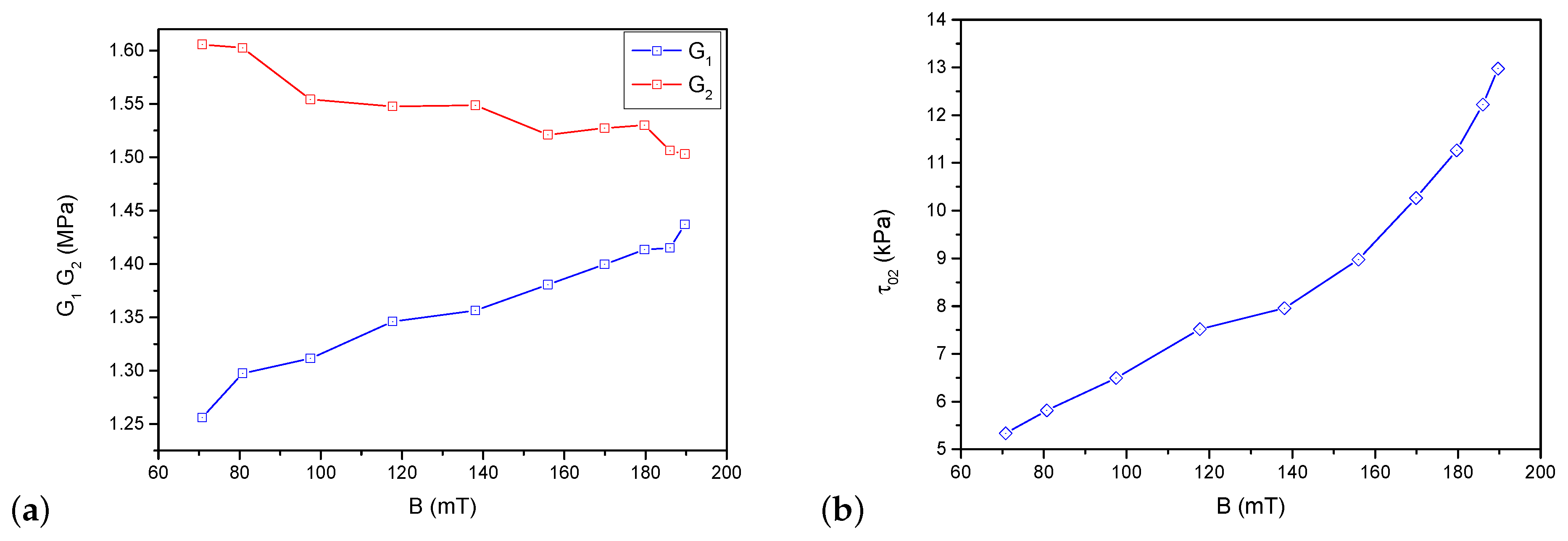
6. Identification of Model Parameters
7. Summary and Conclusions
Funding
Conflicts of Interest
References
- Li, Y.; Li, J.; Li, W.; Du, H. A state-of-the-art review on magnetorheological elastomer devices. Smart Mater. Struct. 2014, 23, 123001. [Google Scholar] [CrossRef] [Green Version]
- Ahamed, R.; Choi, S.B.; Ferdaus, M.M. A state of art on magneto-rheological materials and their potential applications. J. Intell. Mater. Syst. Struct. 2018, 29, 2051–2095. [Google Scholar] [CrossRef]
- Kallio, M. The Elastic and Damping Properties of Magnetorheological Elastomers; VTT Publications: Espoo, Finland, 2005; pp. 3–146. [Google Scholar]
- Yan, Y.X.; Hui, L.X.; Yu, M.; Fu, J.; Dong, L.H. Dynamic response time of a metal foam magneto-rheological damper. Smart Mater. Struct. 2013, 22, 025026. [Google Scholar] [CrossRef]
- Chen, L.; Gong, X.-L.; Li, W.-H. Damping of Magnetorheological Elastomers. Chin. J. Chem. Phys. 2008, 21, 581–585. [Google Scholar] [CrossRef] [Green Version]
- Guan, X.; Dong, X.; Ou, J. Magnetostrictive effect of magnetorheological elastomer. J. Magn. Magn. Mater. 2008, 320, 158–163. [Google Scholar] [CrossRef]
- Carlson, J.D. Implementation of Semi-Active Control Using Magneto-Rheological Fluids. IFAC Proc. Volumes 2000, 33, 905–910. [Google Scholar] [CrossRef]
- Prabakar, R.; Sujatha, C.; Narayanan, S. Optimal semi-active preview control response of a half car vehicle model with magnetorheological damper. J. Sound Vib. 2009, 326, 400–420. [Google Scholar] [CrossRef]
- Kukla, M.; Górecki, J.; Malujda, I.; Talaśka, K.; Tarkowski, P. The Determination of Mechanical Properties of Magnetorheological Elastomers (MREs). Procedia Eng. 2017, 177, 324–330. [Google Scholar] [CrossRef]
- Agirre-Olabide, I.; Kuzhir, P.; Elejabarrieta, M. Linear magneto-viscoelastic model based on magnetic permeability components for anisotropic magnetorheological elastomers. J. Magn. Magn. Mater. 2018, 446, 155–161. [Google Scholar] [CrossRef] [Green Version]
- Puente-Córdova, J.; Reyes-Melo, M.; Palacios-Pineda, L.; Martínez-Perales, I.; Martínez-Romero, O.; Elías-Zúñiga, A. Fabrication and Characterization of Isotropic and Anisotropic Magnetorheological Elastomers, Based on Silicone Rubber and Carbonyl Iron Microparticles. Polymers 2018, 10, 1343. [Google Scholar] [CrossRef]
- Lu, X.; Qiao, X.; Watanabe, H.; Gong, X.; Yang, T.; Li, W.; Sun, K.; Li, M.; Yang, K.; Xie, H.; et al. Mechanical and structural investigation of isotropic and anisotropic thermoplastic magnetorheological elastomer composites based on poly(styrene-b-ethyleneco- butylene-b-styrene) (sebs). Rheol. Acta 2011, 51, 37–50. [Google Scholar] [CrossRef]
- Böse, H.; Röder, R. Magnetorheological Elastomers with High Variability of Their Mechanical Properties. J. Phys. Conf. Ser. 2009, 149, 012090. [Google Scholar] [CrossRef]
- Tong, Y.; Dong, X.; Qi, M. Improved tunable range of the field-induced storage modulus by using flower-like particles as the active phase of magnetorheological elastomers. Soft Matter 2018, 14, 3504–3509. [Google Scholar] [CrossRef]
- Zając, P.; Kaleta, J.; Lewandowski, D.; Gasperowicz, A. Isotropic magnetorheological elastomers with thermoplastic matrices: structure, damping properties and testing. Smart Mater. Struct. 2010, 19, 045014. [Google Scholar] [CrossRef]
- Stepanov, G.; Borin, D.; Odenbach, S. Magnetorheological effect of magneto-active elastomers containing large particles. J. Phys. Conf. Ser. 2009, 149, 012098. [Google Scholar] [CrossRef] [Green Version]
- Cvek, M.; Mrlik, M.; Sevcik, J.; Sedlacik, M. Tailoring Performance, Damping, and Surface Properties of Magnetorheological Elastomers via Particle-Grafting Technology. Polymers 2018, 10, 1411. [Google Scholar] [CrossRef]
- Melenev, P.V.; Raikher, Y.L.; Rusakov, V.V.; Stepanov, G.V. Field-induced plasticity of soft magnetic elastomers. J. Phys. Conf. Ser. 2009, 149, 012094. [Google Scholar] [CrossRef] [Green Version]
- Wang, D.H.; Liao, W.H. Magnetorheological fluid dampers: A review of parametric modelling. Smart Mater. Struct. 2011, 20, 023001. [Google Scholar] [CrossRef]
- Kaleta, J.; Królewicz, M.; Lewandowski, D. Magnetomechanical properties of anisotropic and isotropic magnetorheological composites with thermoplastic elastomer matrices. Smart Mater. Struct. 2011, 20, 085006. [Google Scholar] [CrossRef]
- Halbach, K. Design of permanent multipole magnets with oriented rare earth cobalt material. Nuclear Instrum. Methods 1980, 169, 1–10. [Google Scholar] [CrossRef]
- Bocian, M.; Kaleta, J.; Lewandowski, D.; Przybylski, M. Tunable Absorption System based on magnetorheological elastomers and Halbach array: Design and testing. J. Magn. Magn. Mater. 2017, 435, 46–57. [Google Scholar] [CrossRef]
- Kaleta, J.; Lewandowski, D.; Zietek, G. Inelastic properties of magnetorheological composites: II. Model, identfication of parameters. Smart Mater. Struct. 2007, 16, 1954–1960. [Google Scholar] [CrossRef]
- Kaleta, J.; Lewandowski, D. Inelastic properties of magnetorheological composites: I. Fabrication, experimental tests, cyclic shear properties. Smart Mater. Struct. 2007, 16, 1948–1953. [Google Scholar] [CrossRef]










© 2019 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lewandowski, D. Modeling of Magnetorheological Elastomers Using the Elastic–Plastic Model with Kinematic Hardening. Materials 2019, 12, 892. https://doi.org/10.3390/ma12060892
Lewandowski D. Modeling of Magnetorheological Elastomers Using the Elastic–Plastic Model with Kinematic Hardening. Materials. 2019; 12(6):892. https://doi.org/10.3390/ma12060892
Chicago/Turabian StyleLewandowski, Daniel. 2019. "Modeling of Magnetorheological Elastomers Using the Elastic–Plastic Model with Kinematic Hardening" Materials 12, no. 6: 892. https://doi.org/10.3390/ma12060892
APA StyleLewandowski, D. (2019). Modeling of Magnetorheological Elastomers Using the Elastic–Plastic Model with Kinematic Hardening. Materials, 12(6), 892. https://doi.org/10.3390/ma12060892