1. Introduction
The common way to achieve higher strength for functionally graded material (FGM) plates and shell without stiffeners is to either increase the thickness of this structure or to add stiffeners. The weight of the unstiffened structure will become higher with increasing thickness, but reinforcement with stiffener will reduce the weight as well as the cost of this structure. For this reason, using stiffeners is the best method in special cases such as ship building, bridge construction, aerospace, marine, and so on.
To give more useful information about the application in practice, the buckling behavior of composite structures has received much attention from scientists. Broekel and Gangadharaprusty [
1] used experimental and theoretical solutions to study the mechanical responses of stiffened and unstiffened composite panels subjected to a uniform transverse loading. Liu and Wang [
2] explored the elastic buckling of a plate reinforced by stiffener under in-plane loading. ANSYS modeling was applied to find the optimal height, number, and arrangement of stiffeners. Ueda et al. [
3] proposed an analytical approach to research the buckling and deflection responses of a stiffened plate, which has a deflection under out-of-plane and in-plane loads. Danielson et al. [
4] presented a combination of von Karman and nonlinear beam theories to predict the buckling behavior of a stiffened plate subjected to axial compression. Using the finite element method, Jiang and co-workers [
5] found that the second-order 2D solid element gave accurate results for the buckling problem of unstiffened and stiffened plates. The ABAQUS solution was used by Hughes et al. [
6] to examine the buckling behavior of T-stiffened panels subjected to uniaxial compression and lateral pressure. Pavlovcic et al. [
7] investigated the buckling problem of imperfect stiffened panels using numerical simulation and tests.
Nowadays, with the development of science and technology, many fields require machine details and structures working in harsh environments, such as high temperature, large abrasion, complicated loads, and so on. Therefore, in order to satisfy this demand, the material industry must develop and find new materials specialized for practice areas. Thus far, many new materials have been created to meet this requirement, such as the typical functionally graded material invented by Japanese scientists in 1984. Due to its outstanding advantage of being able to perform in a high-temperature environment as well as its large load capacity, anti-radiation, and anti-corrosion properties, this material has been widely applied in many important areas, such as nuclear science, medicine, chemistry, mining, and so on.
Javaheri and Eslami [
8] explored the thermal buckling behavior of rectangular FGM plates on the basis of classical plate theory and closed-form solutions. This approach was also used by Shariat and Eslami [
9] to study the thermal buckling of imperfect FG plates. The thermal postbuckling response of FGM skew plates based on the finite formulation was adopted by Prakash et al. [
10]. Recently, Moita et al. [
11] presented a formulation for buckling and nonlinear analysis of FGM plates subjected to mechanical and thermal loadings. Based on a semianalytical approach, Dung and Nam [
12] analyzed the nonlinear dynamics of eccentrically stiffened functionally graded circular cylindrical thin shells under external pressure and surrounded by an elastic medium. In [
13], Yu and his co-workers investigated the thermal buckling of functionally graded plates with internal defects in which the extended isogeometric analysis was fully exploited. For this type of problem, Dung and Nga [
14] also discovered the thermomechanical postbuckling of eccentrically stiffened sandwich plates on elastic foundations subjected to in-plane compressive loads, thermal loads, and thermomechanical loads at the same time. The buckling of parallel eccentrically stiffened functionally graded annular spherical segments were studied through the Donnell shell theory and smeared stiffeners technique by Nam et al. [
15]. Bohlooly and Fard [
16] introduced new results for buckling and postbuckling of concentrically stiffened piezo-composite plates on elastic foundations. Chi and Chung [
17] found an analytical solution based on the classical plate theory for the mechanical behavior of fully simply supported FGM plates subjected to transverse loading. Nam et al. [
18] presented finite modeling for the mechanical buckling of cracked stiffened FGM plates based on the first-order shear theory of Mindlin. Trabelsi et al. [
19] explored the thermal postbuckling behavior of functionally graded plates and cylindrical shells using four-node element based on a modified first-order shear deformation theory. These authors continued using this approach to investigate the thermal buckling of functionally graded plates and cylindrical shells [
20]. Chen et al. [
21] studied the buckling and bending behavior of a functionally graded porous plate, with the formulations based on the first-order shear theory and the Chebyshev–Ritz method.
There are many plate theories (from classical to higher-order shear deformation theories) that we can apply to analyze the mechanical behavior of structures made of anisotropic and isotropic materials. The Shi shear deformation theory [
22] is a higher-order shear deformation theory that has many advantages, as discussed in detail in the literature [
22,
23], and it gives an accurate solution for the analysis of shear flexible plates. This theory can be developed to solve the nonlinear constitutive behavior of materials [
24] and problems of materials with misfitting inclusions [
25].
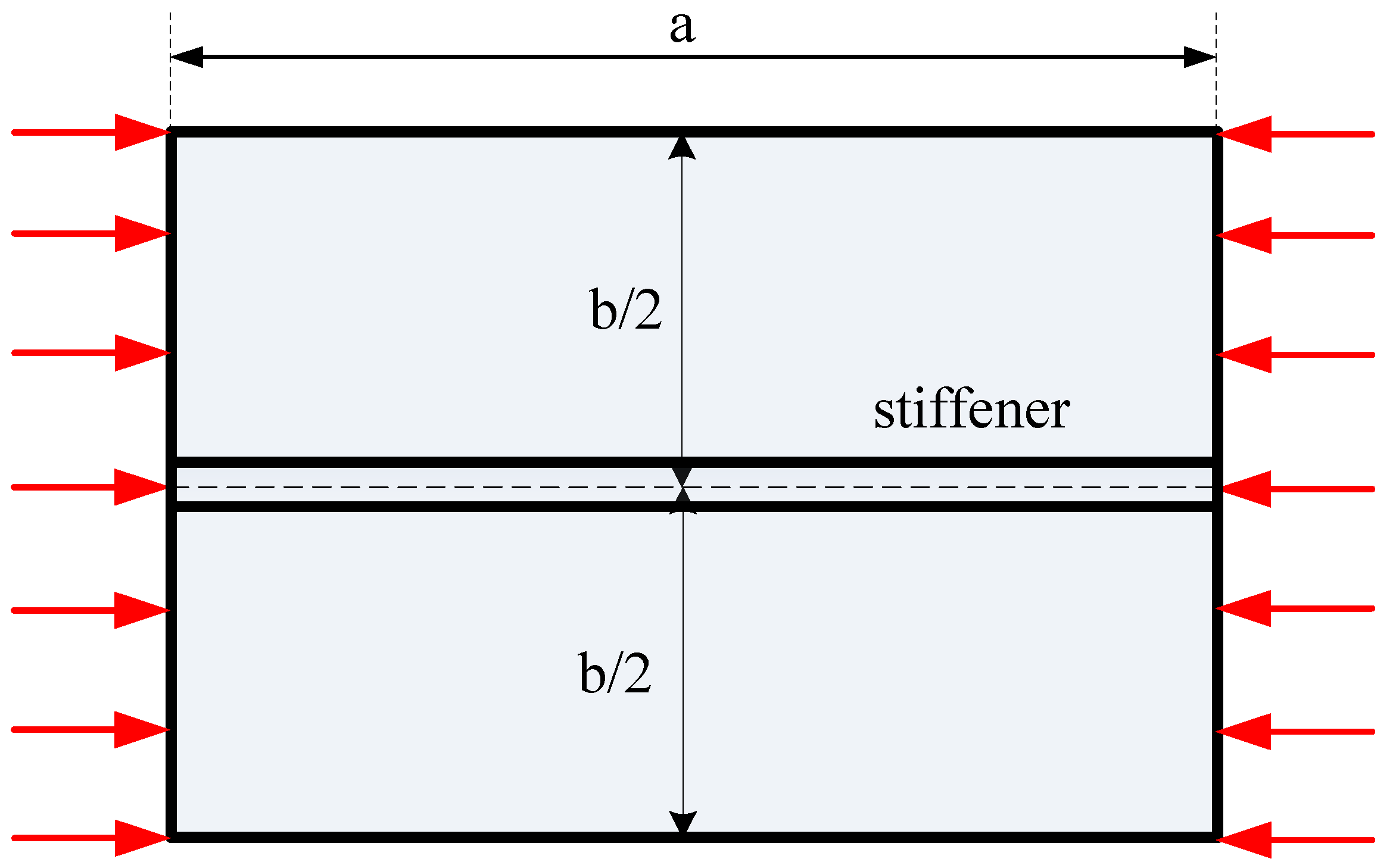
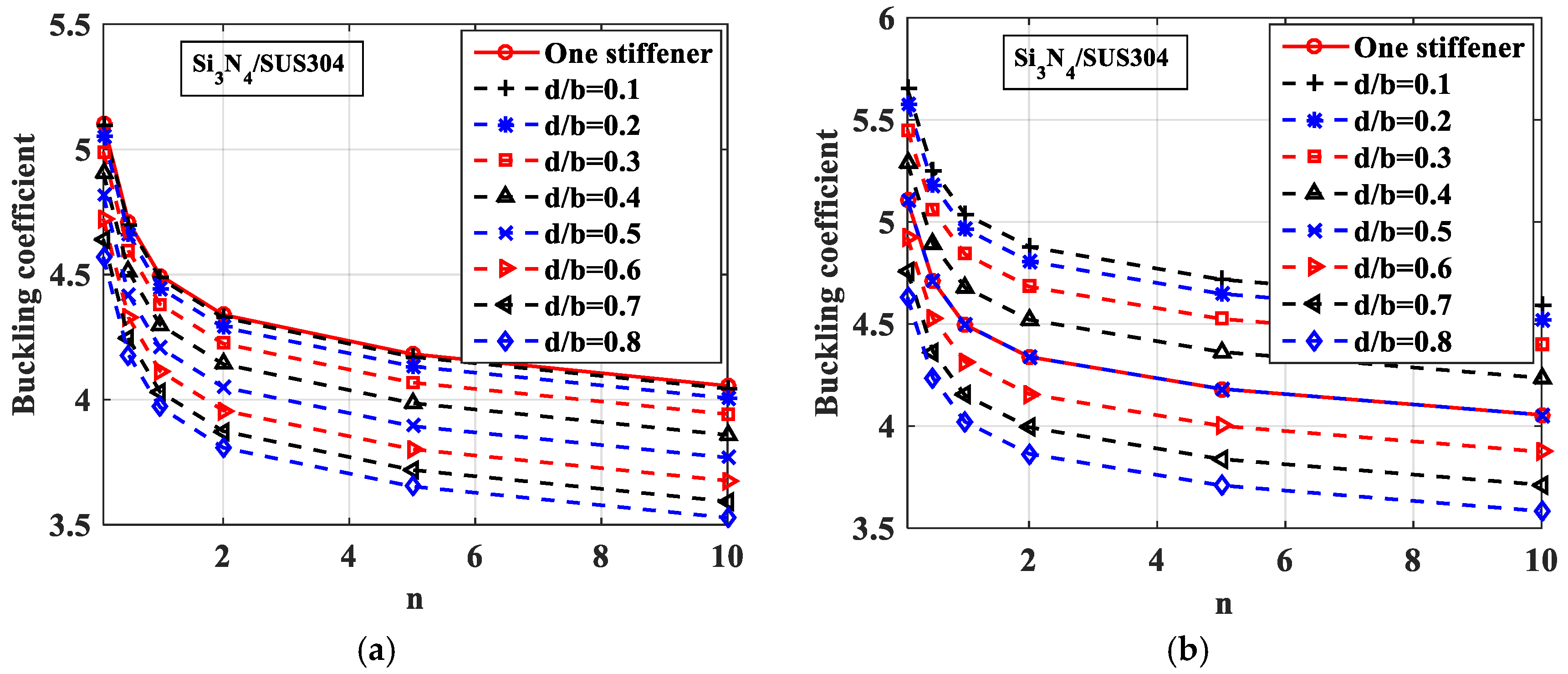
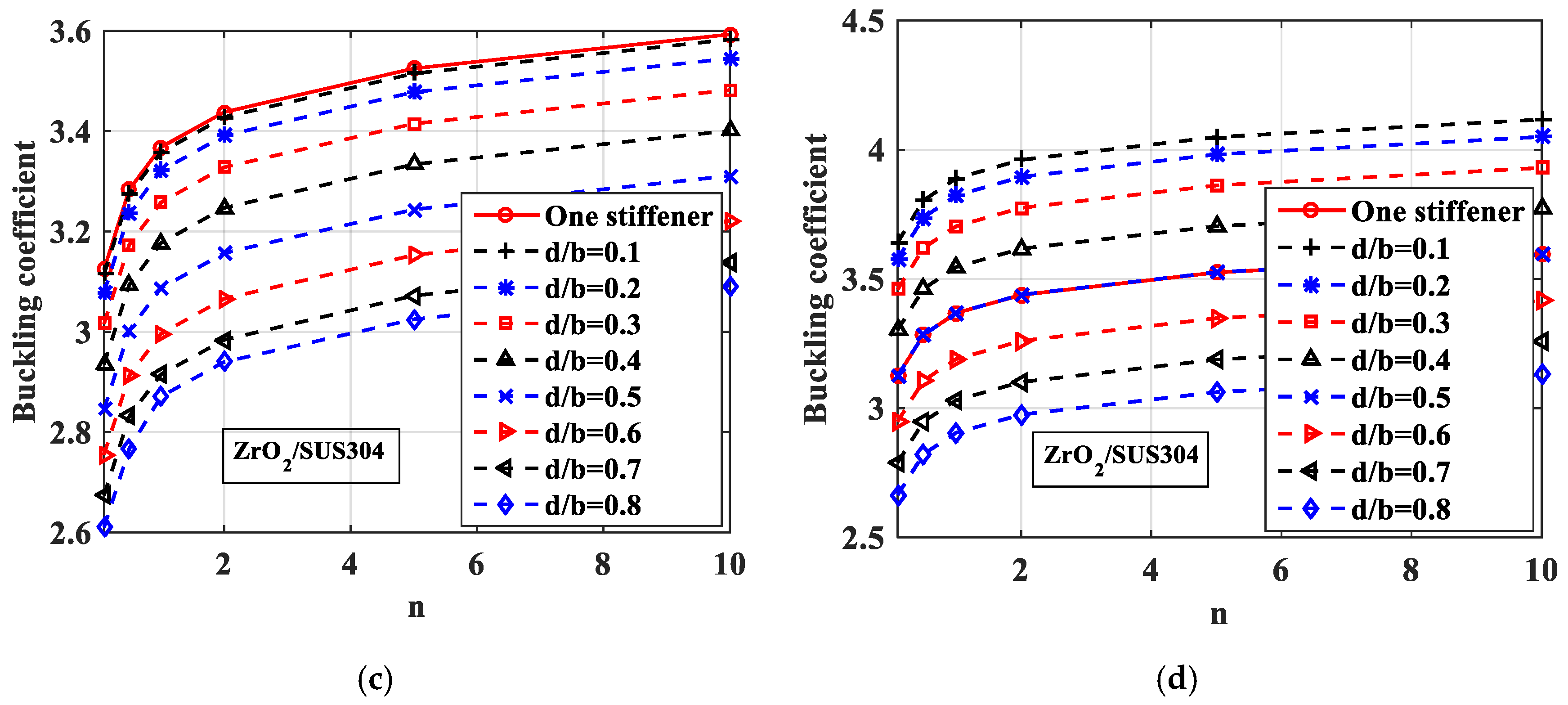
In all of the above published works, many results and conclusions were achieved on the buckling behavior of unstiffened and stiffened plates. However, a detailed study on the percentage weight loss of a stiffened FGM plate compared with a unstiffened one (these two plates having the same buckling strength) has not been done despite this research being very important in structural design and manufacturing. This paper presents a finite element formulation for mechanical buckling responses of stiffened FGM plates based on the G. Shi shear deformation theory. New numerical results were computed to examine the effect of different parameters on the buckling problem of stiffened FGM plates. This study demonstrates clearly the decrease in the weight of a stiffened FGM plate compared with a unstiffened one. Furthermore, this work studied the effects of the distance between two stiffeners on the buckling loads of a stiffened plate in order to determine if the distance results in a buckling strength higher or lower than that of a plate with one central stiffener.
This paper is structured as follows.
Section 2 shows the finite element method using the Shi shear deformation theory for the buckling problem of stiffened FGM plates. The numerical results of the buckling loads for stiffened FGM plates are computed and discussed in
Section 3.
Section 4 gives the main conclusions of this study.
2. Finite Element Formulation for Mechanical Buckling of Stiffened FGM Plates
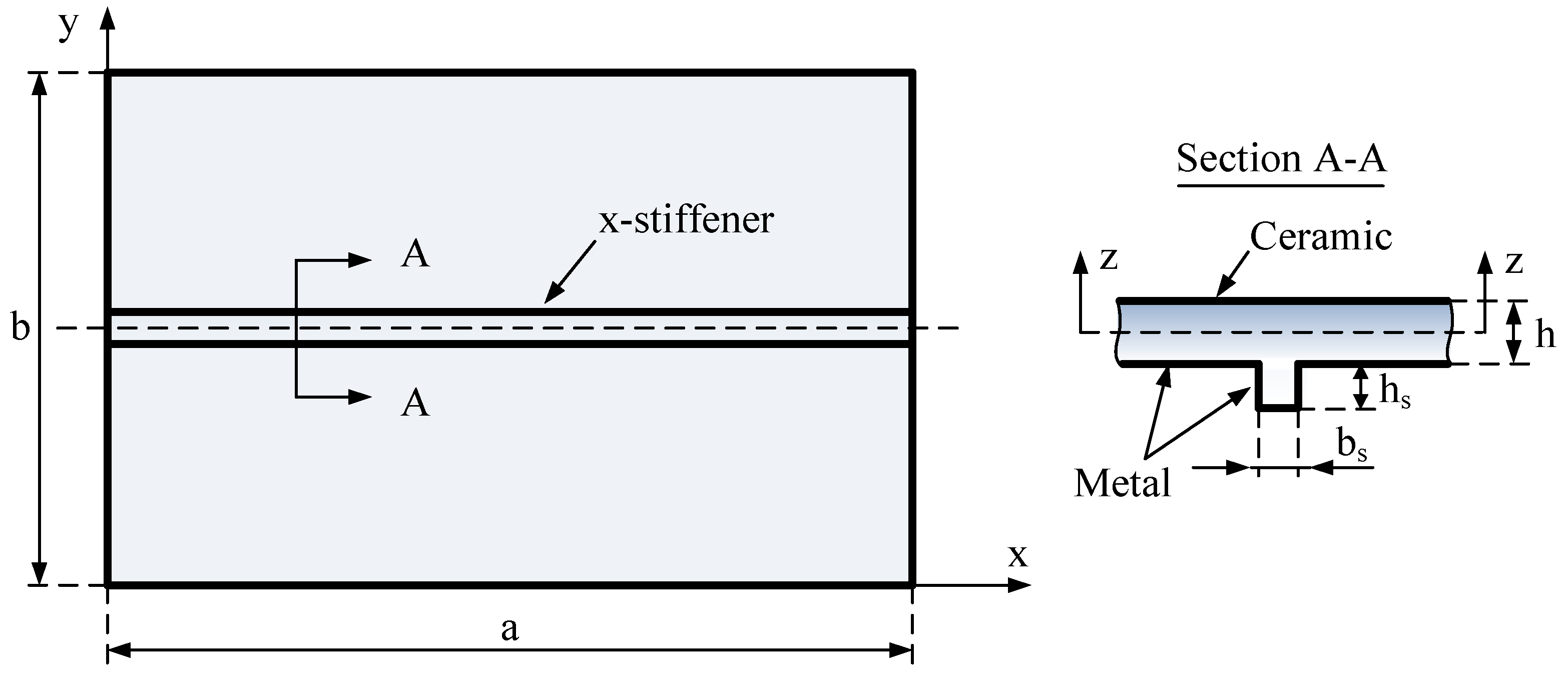
We considered a functionally graded material stiffened plate composed of ceramic and metal phases. The material on the top surface of this plate was full of ceramic and was graded to metal at the bottom surface of the plate by the power law distribution. The stiffener was placed at the bottom surface, and it was full of metal. This meant that the material of the stiffener and the bottom surface was the same.
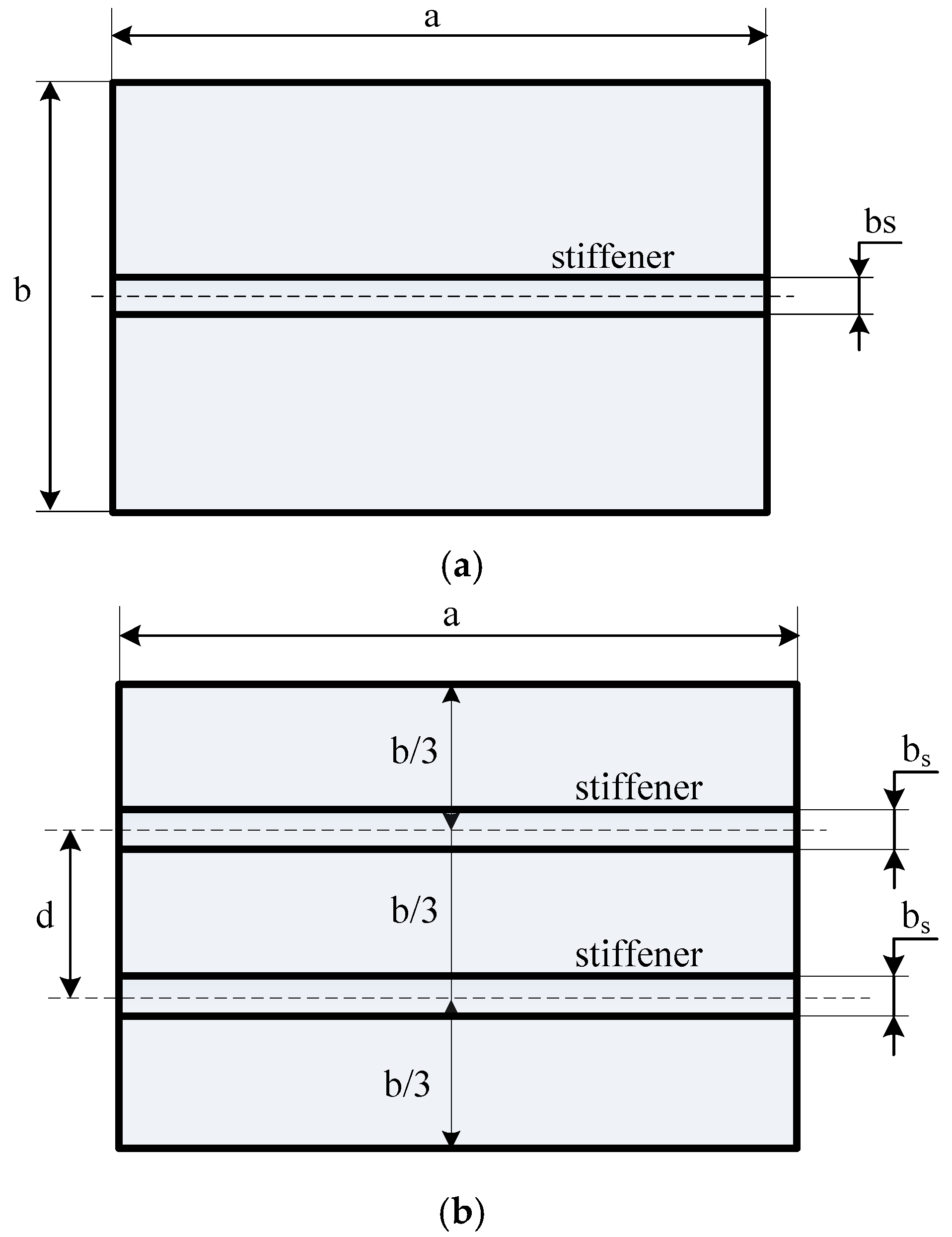
The thickness, length, and width of the plate have been noted as
h,
a, and
b, respectively, while the depth and width of the stiffener are
hs and
bs, respectively, as sketched in
Figure 1. The material was graded by the power law distribution, and it was used for describing the volume fraction of the ceramic (
Vc) and the metal (
Vm) as follows [
23,
26]:
and
where,
h is the thickness of the plate;
n is the gradient index (
n ≥ 0);
z is the thickness coordinate variable (−
h/2 ≤ z ≤
h/2); and subscripts
c and
m represent the ceramic and metal constituents, respectively.
In this study, the Young’s modulus
E and the Poisson’s ratio
change through the
z-direction as follows [
23,
26]:
Using the Shi shear deformation theory [
22,
23], the FGM plate model has the following displacement field (
u, v, w):
where
u0,
v0, and
w0 represent the displacements at
z = 0 (the mid-plane of a plate);
and
are the transverse normal rotations of the
y and
x axes; the comma denotes the differentiation with respect to
x and
y coordinates.
Four nodes per element, seven degrees of freedom per node were used for this problem. The displacement vector of node
i for plate element is as follows:
Because of the degree of freedom, w had the additional first derivative components . Therefore, in order to guarantee the continuous condition of displacement w and its first derivative components at each node, we had to approximate the displacement w by Hermite interpolation functions. The other four degrees of freedom were approximated by Lagrange interpolation functions.
The displacements of the plate in this approach may be expressed as follows:
where
Ni are Lagrange interpolating functions and
Hi are Hermite interpolating functions.
The displacement vector is interpolated through the element’s nodal displacement vector as follows:
where
is the interpolation function matrix;
and
are expressed as follows:
The total strain of this plate in the case of the plate subjected to in-plane prebuckling stresses can be written as follows:
with
By substituting Equation (4) into Equations (13) and (14), the strain field can be obtained as follows:
with
The constitutive relations are derived from Hooke’s law by the following equation:
with
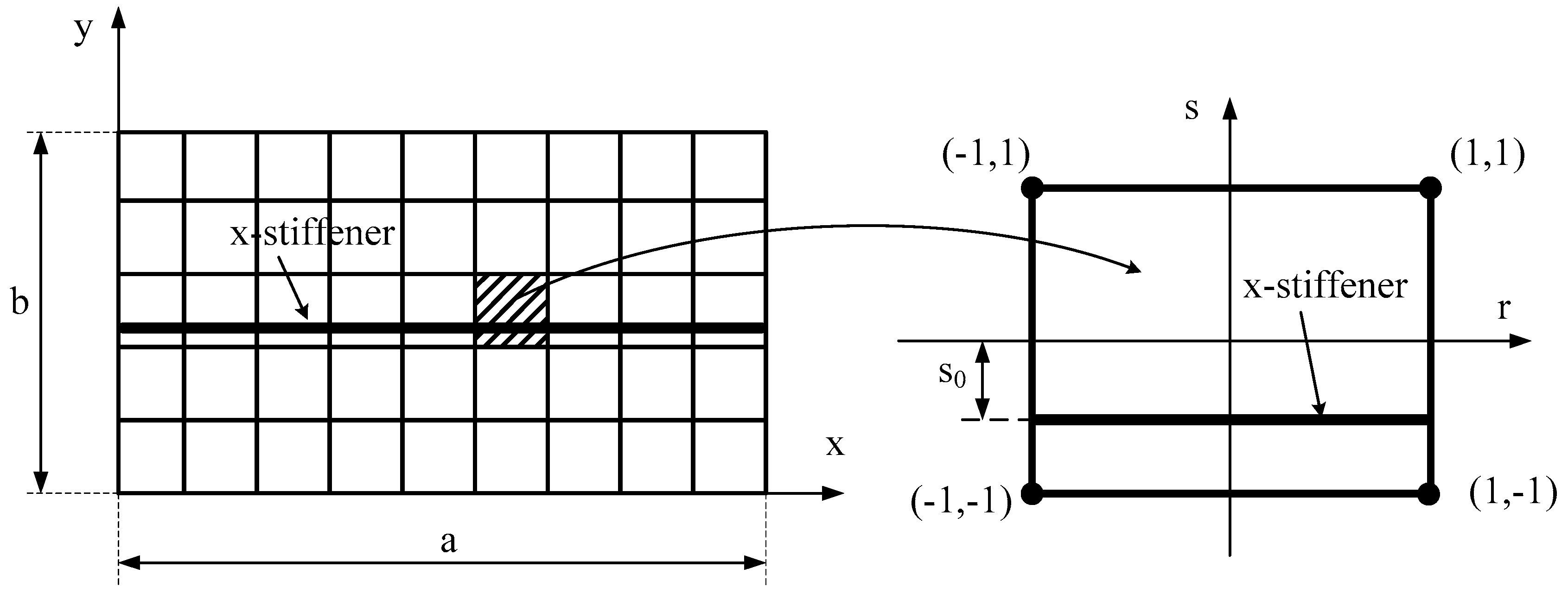
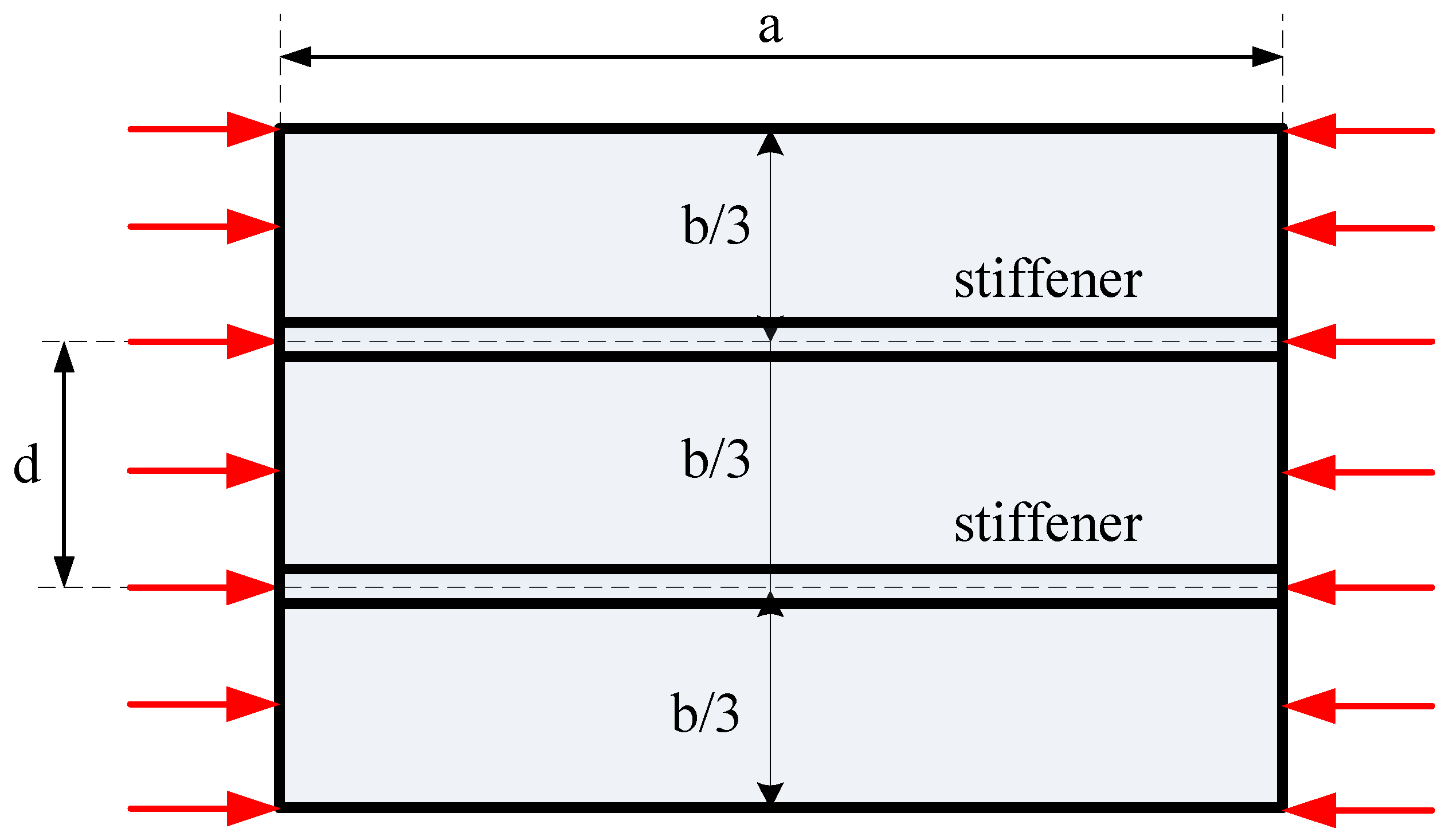
In this work, the stiffener was assumed to be parallel to the
x-axis (See
Figure 2). There was no delamilation phenomenon between the stiffener and the plate during the performance of the structure; the stiffener seemed to be a beam, and it just bent in the
zx-plane. The displacement field of the
x-stiffener can be expressed as follows:
The displacement vector of node
i for the
x-stiffener element is written as follows:
The displacements of the stiffener can now be given in the following form:
where
are Lagrange interpolating functions, and
are Hermite interpolating functions. These functions can be obtained by substituting
s =
s0 into
Ni and
Hi of the plate.
The displacement vector of
x-stiffener is interpolated as follows:
with
The strain components of the stiffener are as follows:
with
By substituting Equation (24) into Equations (27)–(29), the strain field is as follows:
with
The relationship between stresses and strains obtained from Hooke’s law is as follows:
with
The
x-stiffener is considered to place at the lower surface of the plate. The condition of displacement at the contact line is as follows:
Using Equations (3) and (19), Equation (34) becomes the following:
where
Equation (35) can be rewritten as follows:
or in shorter form:
The nodal displacement vector of stiffener element is as follows:
in which
The elastic strain energy of the stiffened plate is written as follows:
or in matrix form:
where
in which
The geometric strain energy enforced by in-plane prebuckling stresses is then computed by the following:
By substituting the geometric strain of the plate and the stiffeners into Equation (49), we get the following:
where
Equation (50) now becomes the following:
with
For the buckling problem, we get the following equation:
where
and
are the global stiffness matrix and global geometric stiffness matrix, respectively.
stands for the vector of unknowns. Equation (57) is solved to obtain the buckling load
and the buckling mode shape.

 ,
, 





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}