An Efficient and Adaptable Path Planning Algorithm for Automated Fiber Placement Based on Meshing and Multi Guidelines

Abstract
:1. Introduction
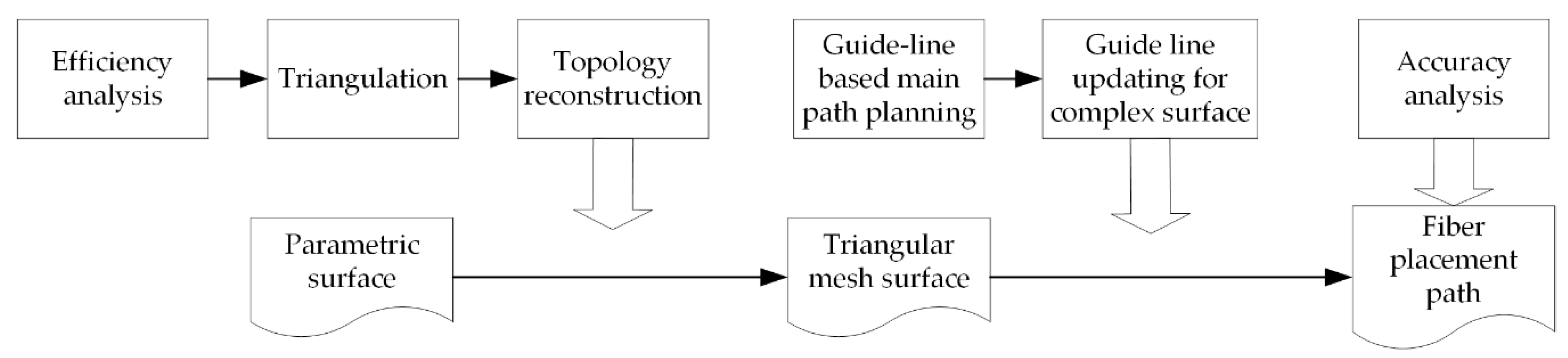
2. Efficiency Analysis and Topology Reconstruction
2.1. Efficiency Analysis of the Proposed Algorithm
2.2. Triangulation Algorithm for Parametric Surface
2.3. Sub-surface Boundary Splicing and Surface Topology Reconstruction
2.3.1. Topology Reconstruction Algorithm for the Triangular Mesh of a Cellular Patch
| Algorithm 1: Vertex aggregation algorithm for triangulation |
| Input: All vertex sets after the triangulation of a cellular parametric surface. Output: Face ID List, Edge ID List and Point ID List for this cellular parametric surface. |
| 1: Loop all strip, fans and triangles: 2: According to the right-hand rule, the vertices in the current discrete cell are stored to form the Point ID List of the current cell parameter surface. |
| 3: Loop all points in the Point ID List 4: Every three points in the point table form a triangle patch to summarize the Face ID list and store the indexes of the three points of the current triangle patch. 5: Point ID List update, add triangle patch ID index. 6: Build the edge ID list, update the two-point indexes of the edge, update the Point ID list to add the edge index, update the Face ID list to add the included edge index. 7: Calculate the normal vector of the current triangular patch according to the right-hand rule, and update it in the Face ID list. |
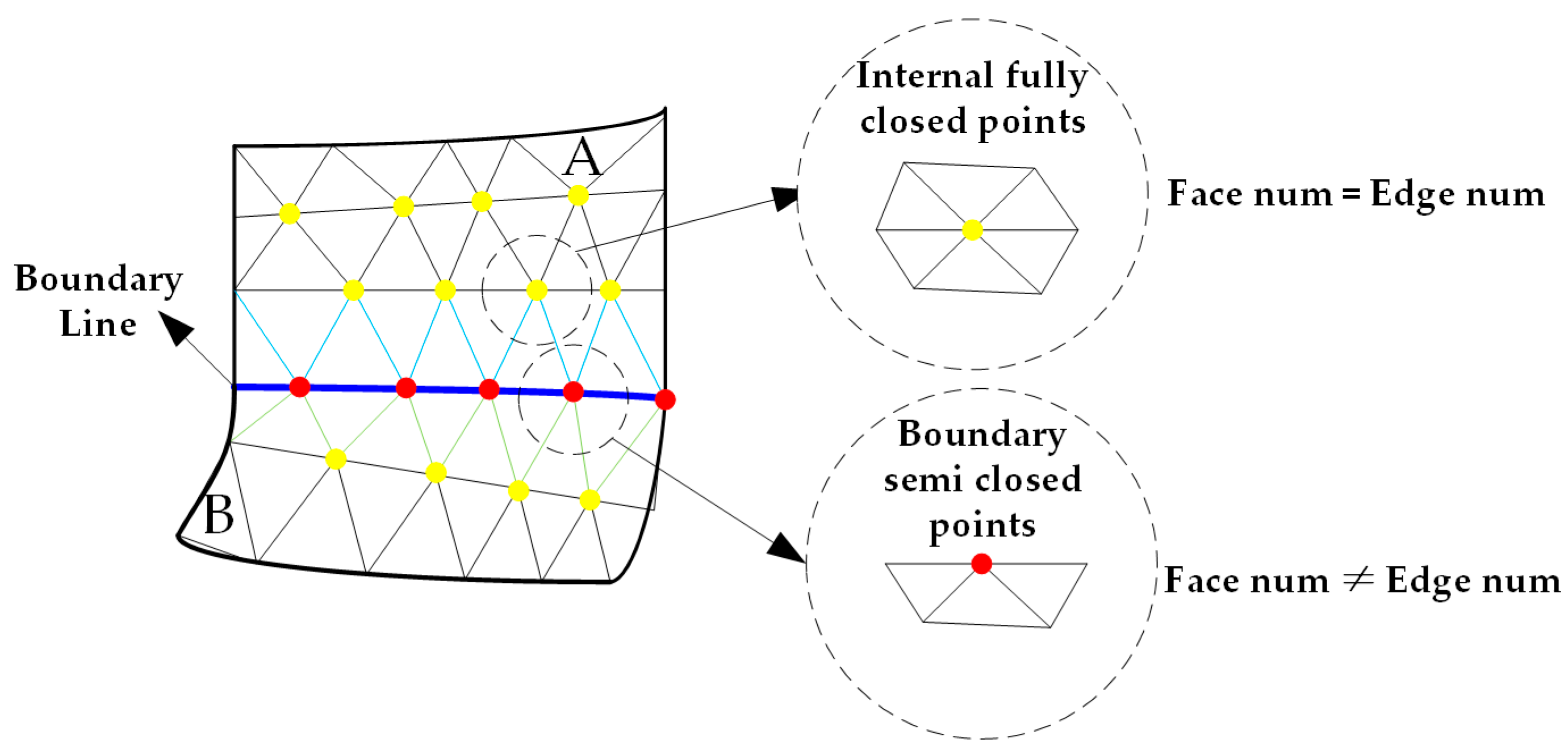
2.3.2. Algorithm for Subsurface-Boundary Splicing
| Algorithm 2: De-duplication algorithm based on vertex closure checking |
| Input: Point ID list before de-duplication. Output: Point ID list after de-duplication. 1: Find semi-closed state vertices 2: Loop all points in all Point ID List: 3: if point->edgenum != point->facenum 4: save this point to duplicate Point ID List; 5: Loop all point1 in duplicate Point ID List: 6: Loop all point2 in duplicate Point ID List: 7: if point1.distanceto (point2) < eps 8: delete point2 in Point ID List; 9: refresh Face ID List & Edge ID List; |
3. Main Path Planning Algorithm Based on Guidelines on Triangular Mesh Surfaces
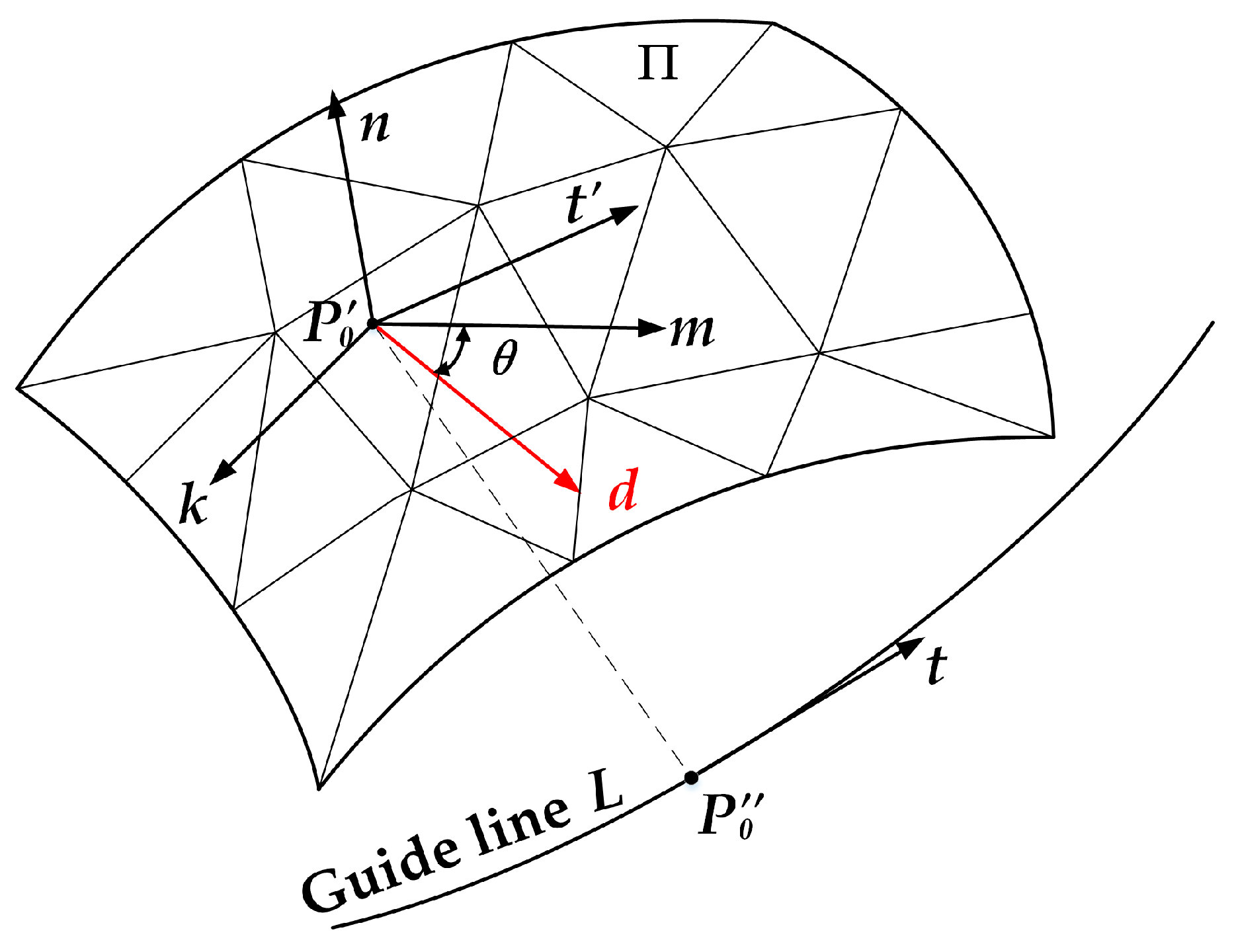
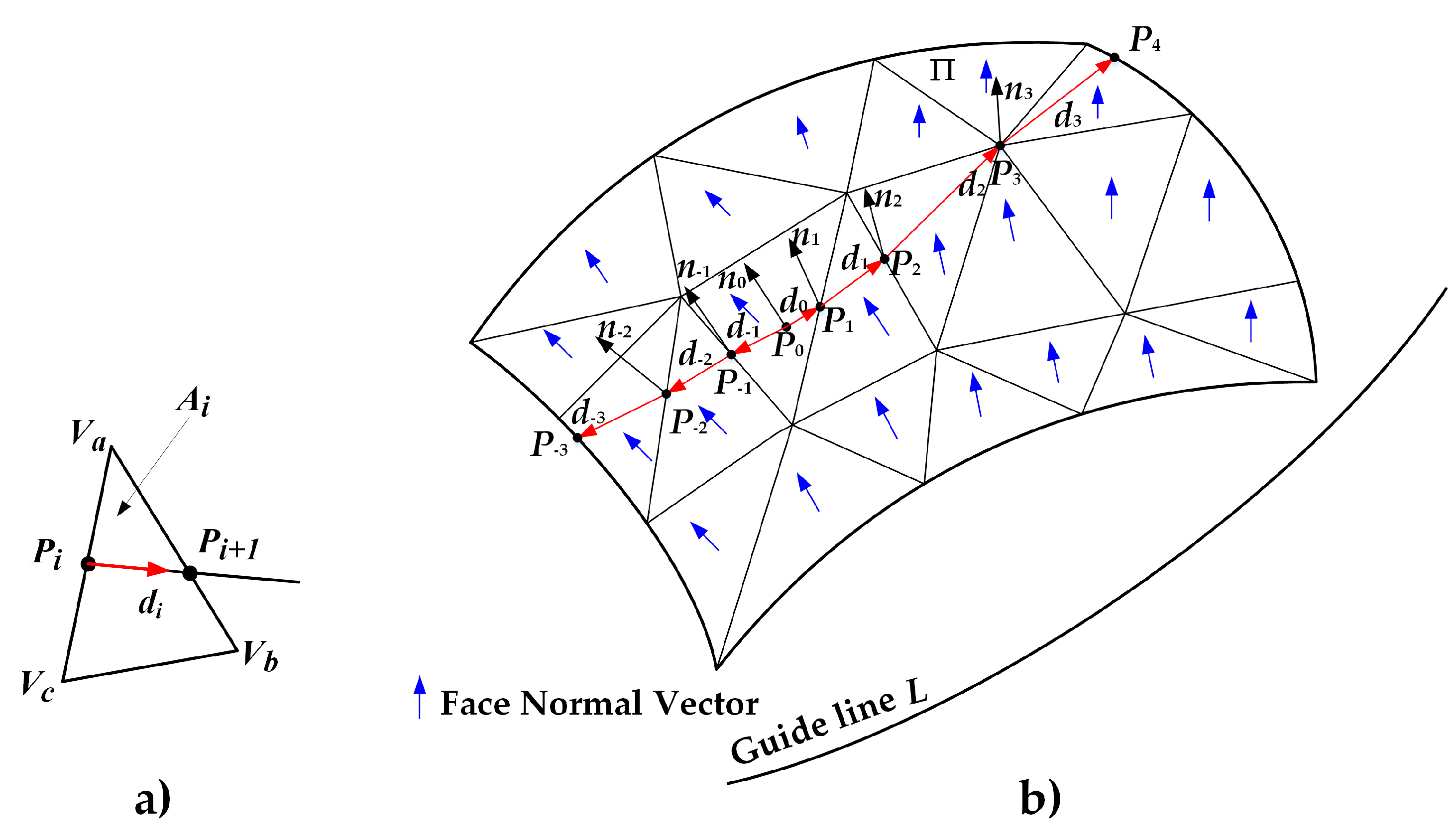
3.1. Main Motion Path Generation Algorithm
3.2. Guide-line Update Algorithm for Complex Surfaces
4. Accuracy Analysis of the Generated Path Based on Surface Meshing
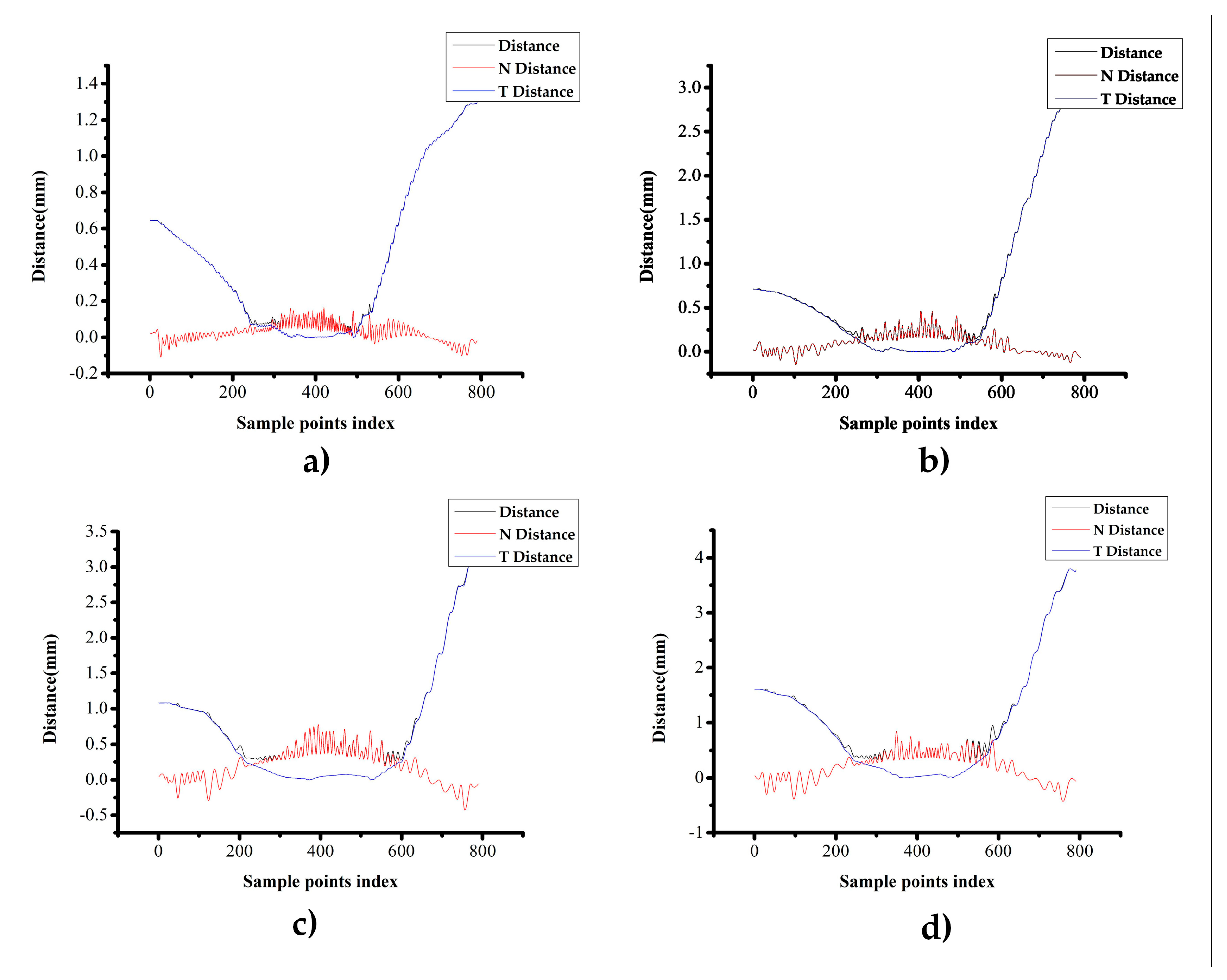
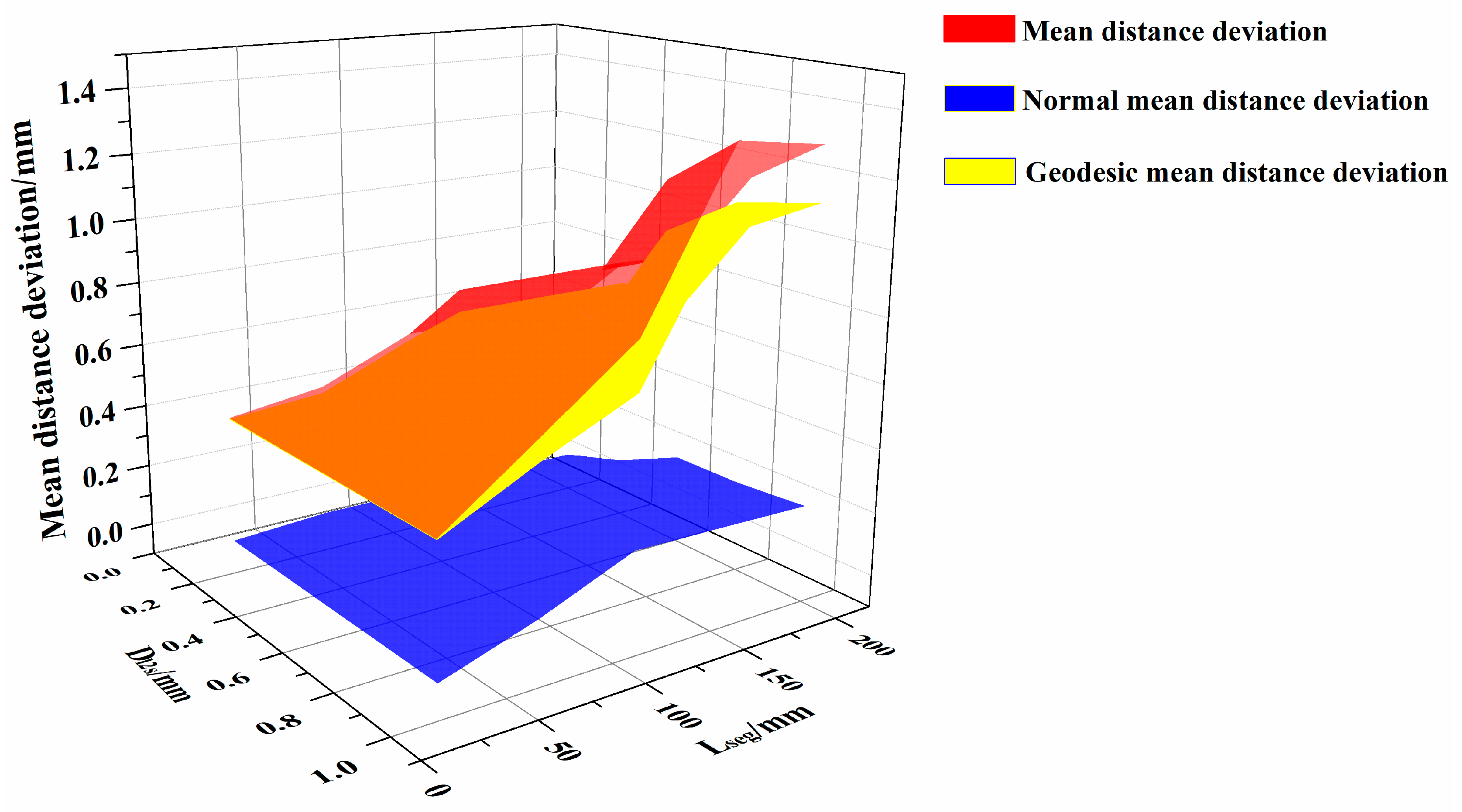
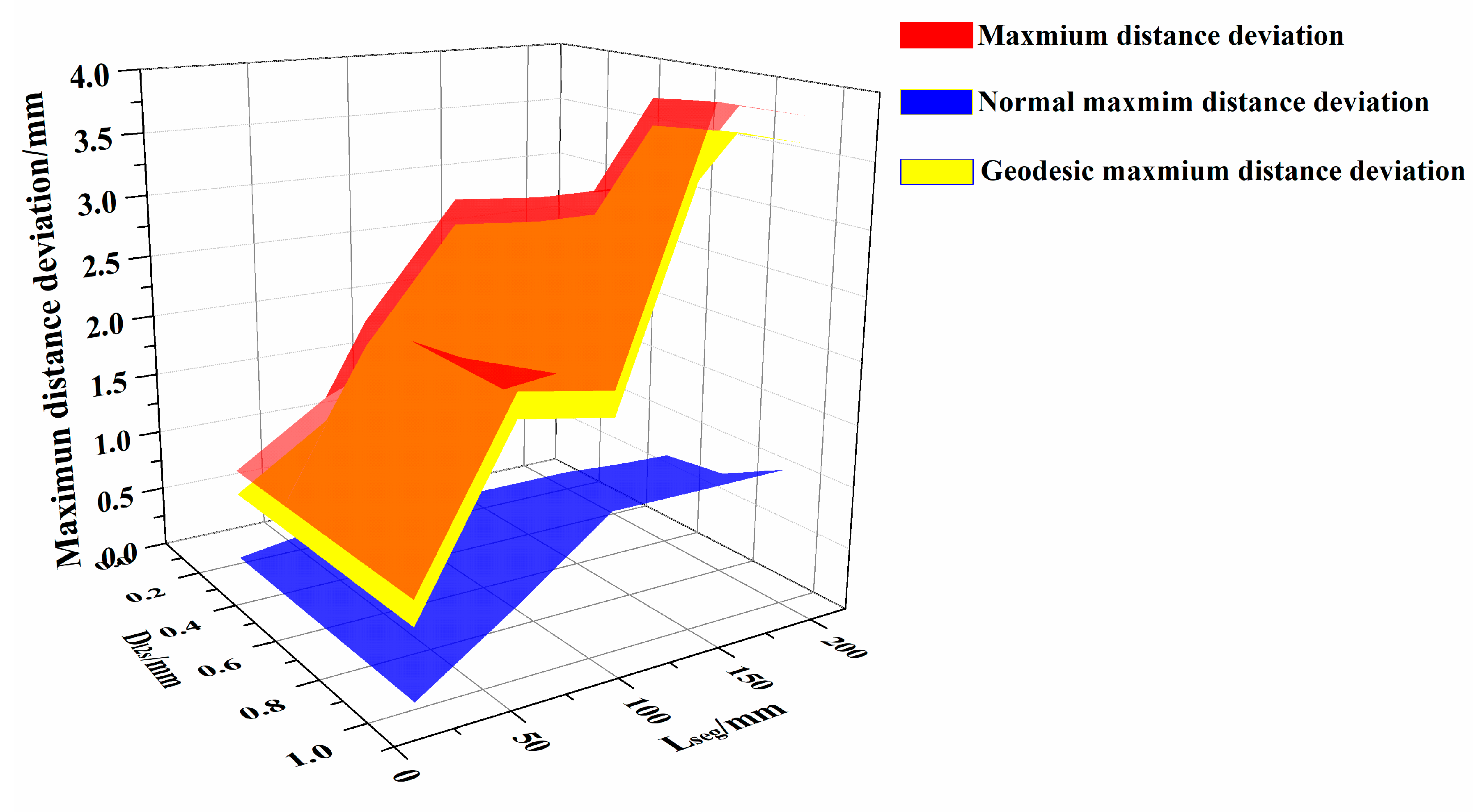
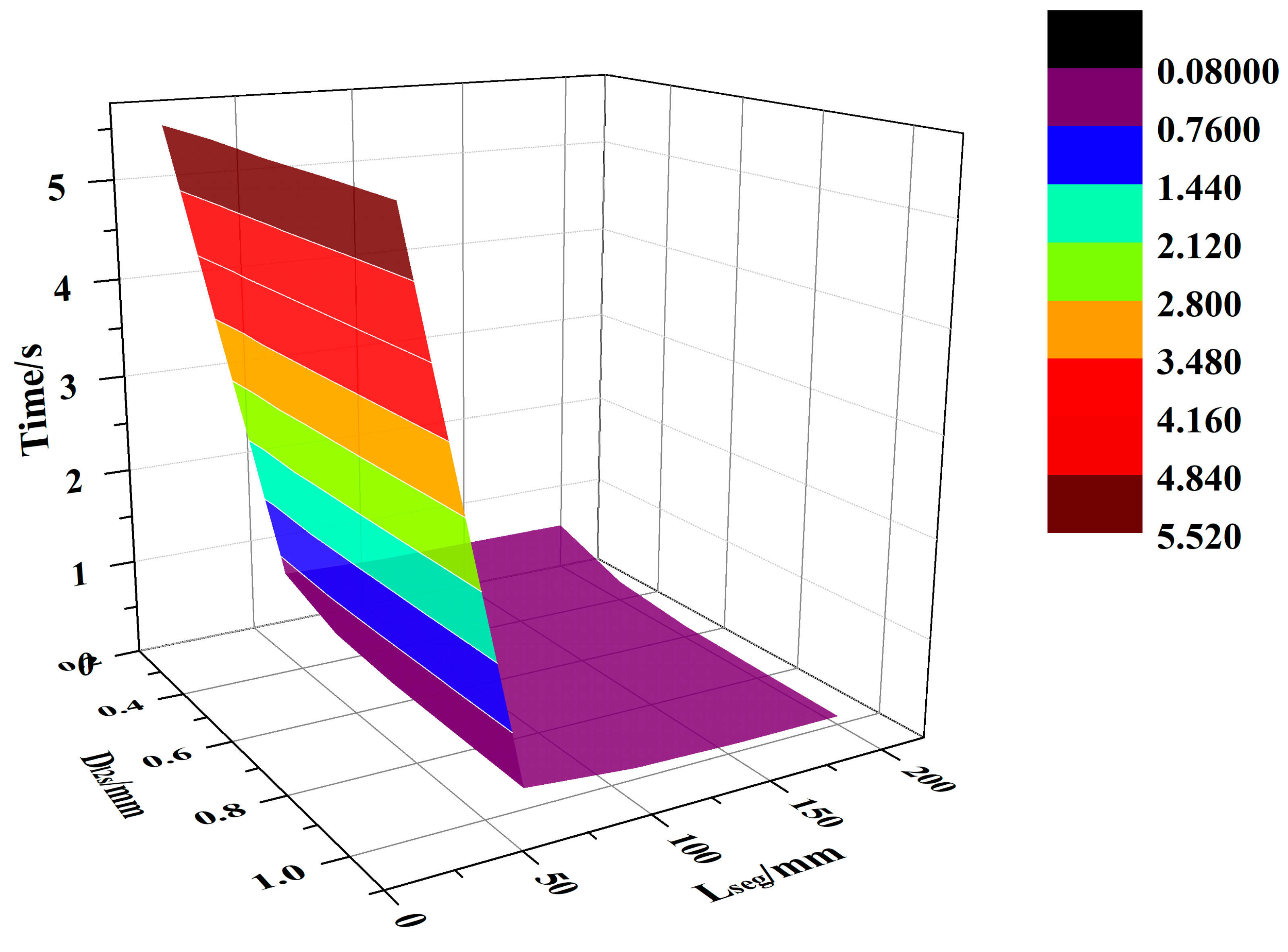
4.1. Distance Deviation Analysis
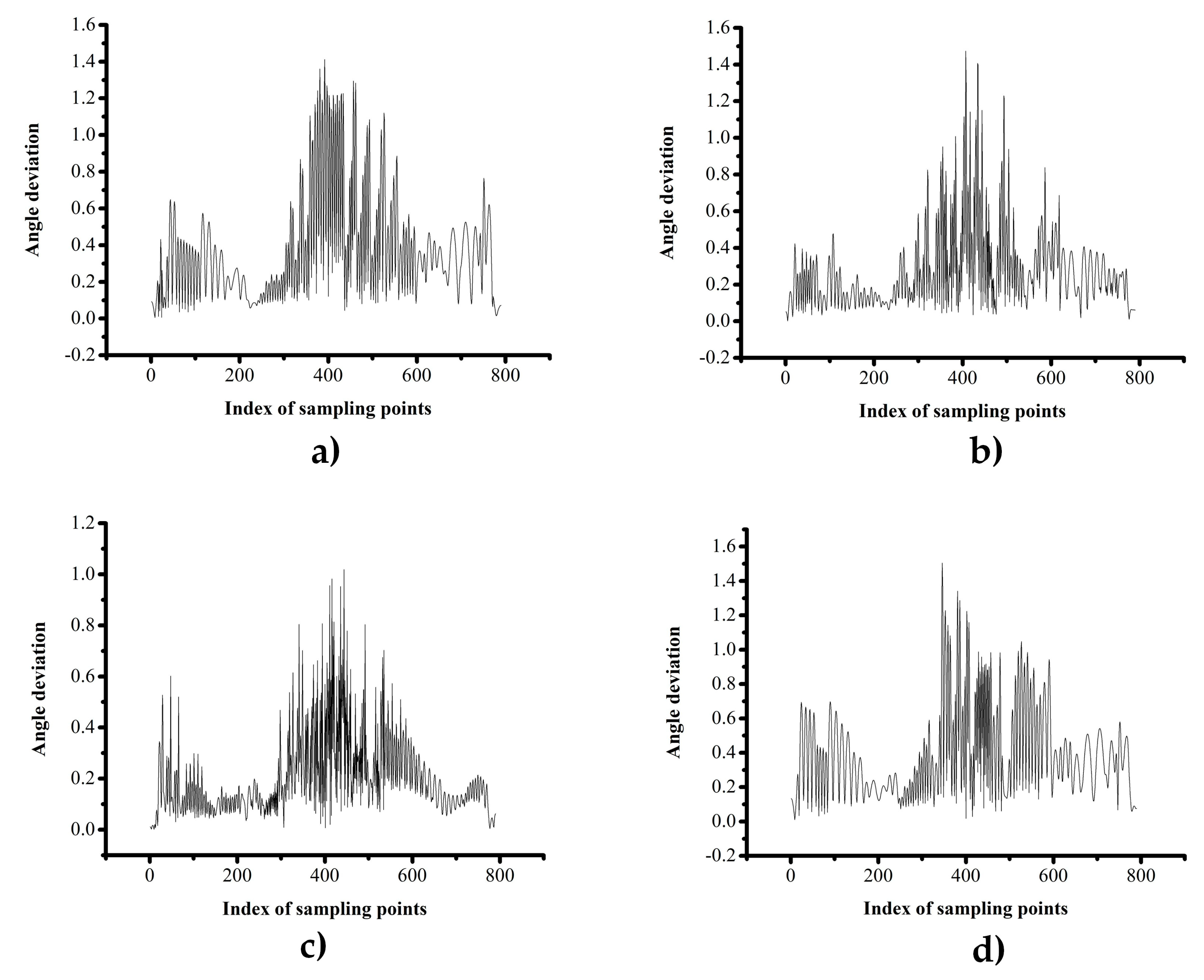
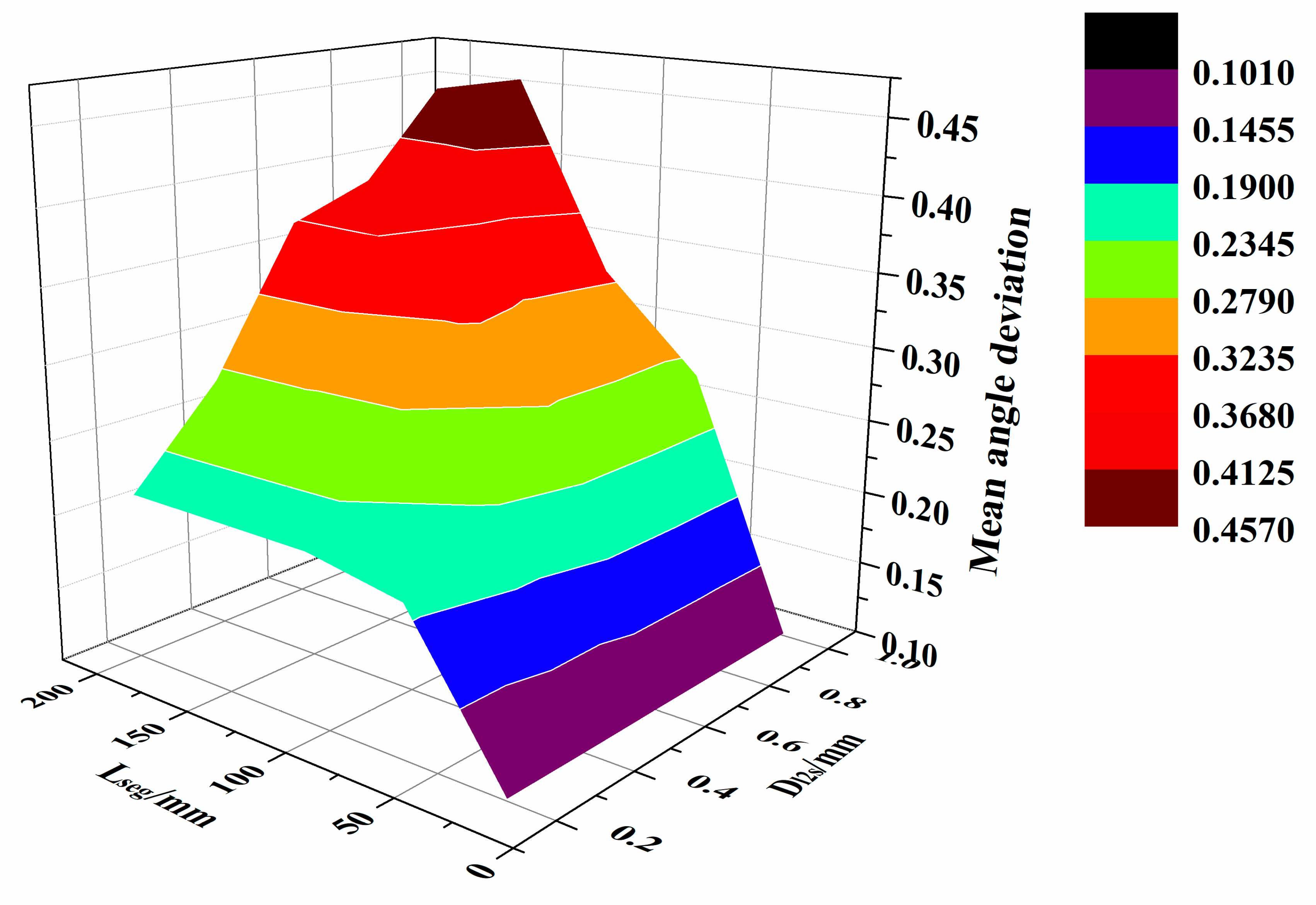
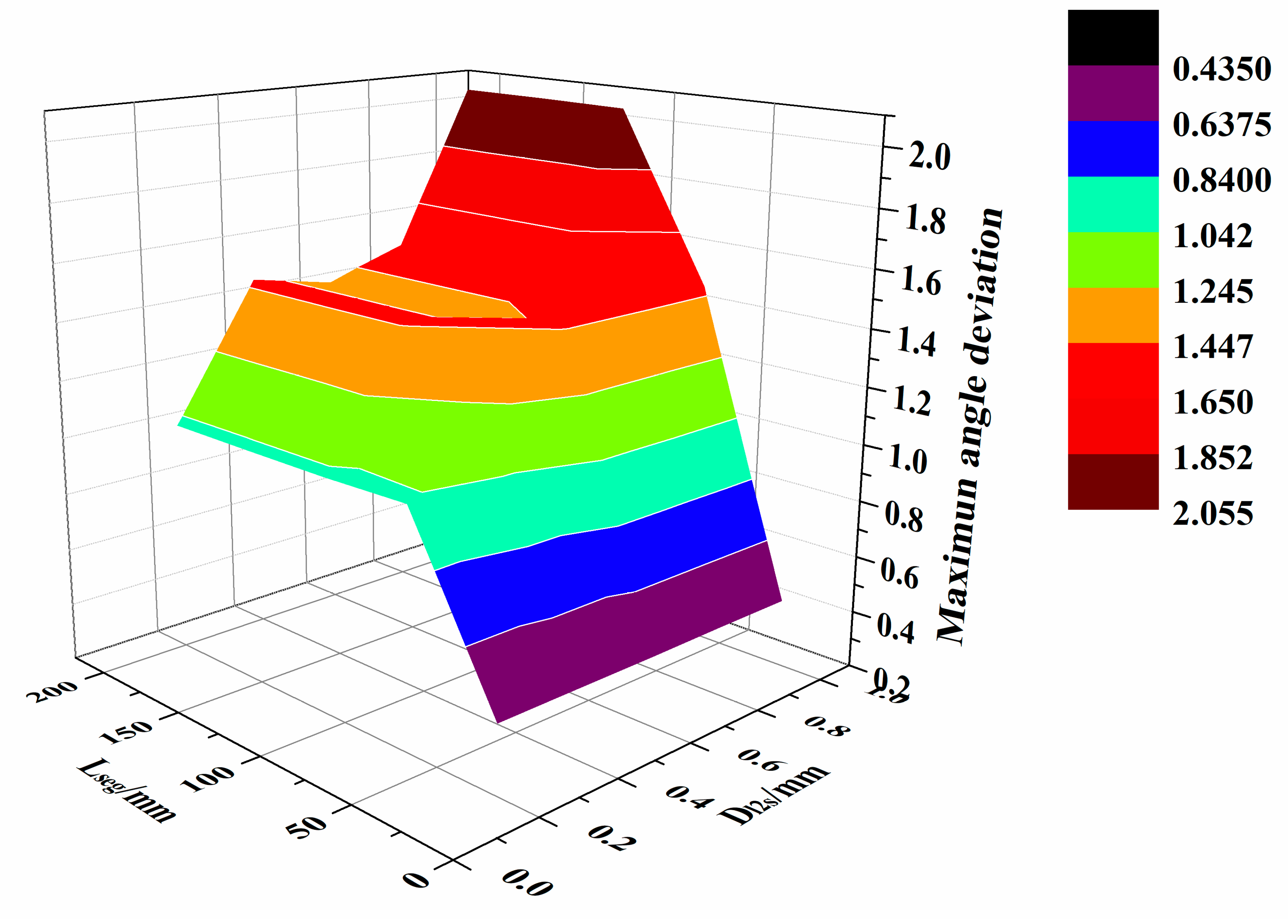
4.2. Angle Deviation Analysis
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Kozaczuk, K. Automated fiber placement systems overview. Trans. Inst. Aviat. 2016, 245, 52–59. [Google Scholar] [CrossRef]
- August, Z.; Ostrander, G.; Michasiow, J.; Hauber, D. Recent developments in automated fiber placement of thermoplastic composites. SAMPE J. 2014, 50, 30–37. [Google Scholar]
- Rousseau, G.; Wehbe, R.; Halbritter, J.; Harik, R. Automated Fiber Placement Path Planning: A state-of-the-art review. Comput.-Aided Des. Appl. 2018, 16, 172–203. [Google Scholar] [CrossRef] [Green Version]
- Lewis, H.; Romero, J. Composite Tape Placement Apparatus with Natural Path Generation Means. U.S. Patent 4,696,707, 29 September 1987. [Google Scholar]
- Shirinzadeh, B.; Foong, C.W.; Tan, B.H. Robotic fibre placement process planning and control. Assem. Autom. 2000, 20, 313–320. [Google Scholar] [CrossRef]
- Shirinzadeh, B.; Alici, G.; Foong, C.W.; Cassidy, G. Fabrication process of open surfaces by robotic fibre placement. Robot. Comput.-Integr. Manuf. 2004, 20, 17–28. [Google Scholar] [CrossRef]
- Shirinzadeh, B.; Cassidy, G.; Oetomo, D.; Alici, G.; Ang, M.H. Trajectory generation for open-contoured structures in robotic fibre placement. Robot. Comput.-Integr. Manuf. 2007, 23, 380–394. [Google Scholar] [CrossRef]
- Peng, Z.; Ronglei, S.; Xueying, Z.; Lingjin, H. Placement suitability criteria of composite tape for mould surface in automated tape placement. Chin. J. Aeronaut. 2015, 28, 1574–1581. [Google Scholar]
- Zhang, P.; Sun, R.; Huang, T. A geometric method for computation of geodesic on parametric surfaces. Comput. Aided Geom. Des. 2015, 38, 24–37. [Google Scholar] [CrossRef]
- Savio, G.; Meneghello, R.; Concheri, G. Geometric modeling of lattice structures for additive manufacturing. Rapid Prototyp. J. 2018, 24, 351–360. [Google Scholar] [CrossRef]
- Zhang, Q.; Sabin, M.A.; Cirak, F. Subdivision surfaces with isogeometric analysis adapted refinement weights. Comput.-Aided Des. 2018, 102, 104–114. [Google Scholar] [CrossRef] [Green Version]
- Shinno, N.; Shigemat, T. Method for Controlling Tape Affixing Direction of Automatic Tape Affixing Apparatus. U.S. Patent 5,041,179, 20 August 1991. [Google Scholar]
- Li, L.; Wang, X.; Xu, D.; Tan, M. A Placement Path Planning Algorithm Based on Meshed Triangles for Carbon Fiber Reinforce Composite Component with Revolved Shape. Int. J. Control Syst. Appl. 2014, 1, 23–32. [Google Scholar]
- Shen, J.; Buse, L.; Alliez, P.; Dodgson, N.A. A line/trimmed NURBS surface intersection algorithm using matrix representations. Comput. Aided Geom. Des. 2016, 48, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Lo, S.H.; Wang, W.X. An algorithm for the intersection of quadrilateral surfaces by tracing of neighbours. Comput. Methods Appl. Mech. Eng. 2003, 192, 2319–2338. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Class | Contents | Features |
|---|---|---|
| Vertex | int vIndex; double p [3]; int EdgeIndexList [cur edge index]; int FaceIndexList [cur face index]; | Given the index number of a vertex, one can quickly find the global index of the triangle patch and the global index for the edge, where the current vertex belongs. |
| Edge | int eIndex; int VertexIndexList [2]; int FaceIndexList [2]; | Given the number of a side, one can quickly find the global index of the face, where the current edge belongs and the global indices of the two vertices at the current edge. |
| Face | int fIndex; doubla n [3];int VertexIndexList [3]; int EdgeIndexList [3]; | Given the number of a triangle patch, one can quickly find the global index and the global index of the three edges of the three vertices on the triangle patch. |
| Dl2s /mm | Lseg /mm | Mean Distance Deviation /mm | Normal Mean Distance Deviation /mm | Geodesic Mean Distance Deviation /mm | Maximum Distance Deviation /mm | Maximum Normal Distance Deviation /mm | Maximum Geodesic Distance Deviation /mm | Generation Time /s |
|---|---|---|---|---|---|---|---|---|
| 0.2 | 20 | 0.41072 | 0.00824 | 0.40834 | 0.81222 | 0.05218 | 0.81219 | 5.506 |
| 0.2 | 65 | 0.45268 | 0.02694 | 0.4329 | 1.29759 | 0.16468 | 1.29745 | 0.549 |
| 0.2 | 110 | 0.57411 | 0.02534 | 0.55406 | 1.60354 | 0.16447 | 1.60342 | 0.508 |
| 0.2 | 155 | 0.57298 | 0.02557 | 0.55294 | 1.60354 | 0.16447 | 1.60342 | 0.508 |
| 0.2 | 200 | 0.57309 | 0.02547 | 0.55304 | 1.60354 | 0.16447 | 1.60342 | 0.505 |
| 0.4 | 20 | 0.41072 | 0.00824 | 0.40834 | 0.81222 | 0.05218 | 0.81219 | 5.514 |
| 0.4 | 65 | 0.54446 | 0.09072 | 0.47922 | 2.12237 | 0.36747 | 2.12172 | 0.296 |
| 0.4 | 110 | 0.78375 | 0.09412 | 0.71355 | 3.00629 | 0.46252 | 3.00561 | 0.214 |
| 0.4 | 155 | 0.78403 | 0.09052 | 0.71476 | 2.94274 | 0.46246 | 2.94204 | 0.209 |
| 0.4 | 200 | 0.78403 | 0.09052 | 0.71476 | 2.94274 | 0.46246 | 2.94204 | 0.213 |
| 0.6 | 20 | 0.41072 | 0.00824 | 0.40834 | 0.81222 | 0.05218 | 0.81219 | 5.495 |
| 0.6 | 65 | 0.62143 | 0.1036 | 0.55255 | 2.14027 | 0.55588 | 2.13962 | 0.231 |
| 0.6 | 110 | 0.65292 | 0.20369 | 0.4915 | 1.62566 | 0.77333 | 1.62391 | 0.142 |
| 0.6 | 155 | 0.86012 | 0.18893 | 0.69804 | 3.09987 | 0.77349 | 3.0993 | 0.13 |
| 0.6 | 200 | 0.8602 | 0.18895 | 0.6985 | 3.08182 | 0.77349 | 3.08124 | 0.128 |
| 0.8 | 20 | 0.41072 | 0.00824 | 0.40834 | 0.81222 | 0.05218 | 0.81219 | 5.499 |
| 0.8 | 65 | 0.62315 | 0.10188 | 0.55424 | 2.19272 | 0.55588 | 2.19207 | 0.213 |
| 0.8 | 110 | 0.78546 | 0.20771 | 0.63916 | 1.94612 | 0.84012 | 1.94459 | 0.115 |
| 0.8 | 155 | 1.18547 | 0.19293 | 1.03511 | 3.91933 | 0.84004 | 3.91922 | 0.098 |
| 0.8 | 200 | 1.15638 | 0.19065 | 1.00657 | 3.8031 | 0.84004 | 3.80299 | 0.103 |
| 1 | 20 | 0.41072 | 0.00824 | 0.40834 | 0.81222 | 0.05218 | 0.81219 | 5.491 |
| 1 | 65 | 0.62147 | 0.10314 | 0.55262 | 2.14027 | 0.55588 | 2.13962 | 0.203 |
| 1 | 110 | 0.83477 | 0.2216 | 0.68092 | 2.01082 | 1.10312 | 2.00955 | 0.105 |
| 1 | 155 | 1.33796 | 0.21533 | 1.16792 | 3.97448 | 1.10346 | 3.97407 | 0.082 |
| 1 | 200 | 1.29659 | 0.20791 | 1.12927 | 3.81894 | 1.10346 | 3.8185 | 0.083 |
| Dl2s /mm | Lseg /mm | Mean Angle Deviation /deg | Mean Square Error /deg2 | Maximum Angle Deviation /deg |
|---|---|---|---|---|
| 0.2 | 20 | 0.10162 | 0.09583 | 0.43632 |
| 0.2 | 65 | 0.19909 | 0.1562 | 1.019 |
| 0.2 | 110 | 0.21098 | 0.15039 | 1.01133 |
| 0.2 | 155 | 0.21159 | 0.15056 | 1.01142 |
| 0.2 | 200 | 0.21204 | 0.15059 | 1.01141 |
| 0.4 | 20 | 0.10162 | 0.09583 | 0.43632 |
| 0.4 | 65 | 0.22812 | 0.16134 | 1.1537 |
| 0.4 | 110 | 0.27022 | 0.21115 | 1.47317 |
| 0.4 | 155 | 0.27248 | 0.20807 | 1.47248 |
| 0.4 | 200 | 0.27248 | 0.20807 | 1.47248 |
| 0.6 | 20 | 0.10162 | 0.09583 | 0.43632 |
| 0.6 | 65 | 0.2696 | 0.24432 | 1.47683 |
| 0.6 | 110 | 0.33184 | 0.27956 | 1.41166 |
| 0.6 | 155 | 0.36801 | 0.27632 | 1.4119 |
| 0.6 | 200 | 0.36668 | 0.27738 | 1.4119 |
| 0.8 | 20 | 0.10162 | 0.09583 | 0.43632 |
| 0.8 | 65 | 0.27083 | 0.2446 | 1.47683 |
| 0.8 | 110 | 0.3184 | 0.25209 | 1.50431 |
| 0.8 | 155 | 0.39048 | 0.25162 | 1.50424 |
| 0.8 | 200 | 0.38589 | 0.2524 | 1.50424 |
| 1 | 20 | 0.10162 | 0.09583 | 0.43632 |
| 1 | 65 | 0.26882 | 0.24516 | 1.47683 |
| 1 | 110 | 0.33021 | 0.29158 | 2.0499 |
| 1 | 155 | 0.45625 | 0.32954 | 2.05242 |
| 1 | 200 | 0.44346 | 0.32784 | 2.05242 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiao, H.; Han, W.; Tang, W.; Duan, Y. An Efficient and Adaptable Path Planning Algorithm for Automated Fiber Placement Based on Meshing and Multi Guidelines. Materials 2020, 13, 4209. https://doi.org/10.3390/ma13184209
Xiao H, Han W, Tang W, Duan Y. An Efficient and Adaptable Path Planning Algorithm for Automated Fiber Placement Based on Meshing and Multi Guidelines. Materials. 2020; 13(18):4209. https://doi.org/10.3390/ma13184209
Chicago/Turabian StyleXiao, Hong, Wei Han, Wenbin Tang, and Yugang Duan. 2020. "An Efficient and Adaptable Path Planning Algorithm for Automated Fiber Placement Based on Meshing and Multi Guidelines" Materials 13, no. 18: 4209. https://doi.org/10.3390/ma13184209
APA StyleXiao, H., Han, W., Tang, W., & Duan, Y. (2020). An Efficient and Adaptable Path Planning Algorithm for Automated Fiber Placement Based on Meshing and Multi Guidelines. Materials, 13(18), 4209. https://doi.org/10.3390/ma13184209