1. Introduction
Concrete is one of the most commonly used materials in civil structures. From a scientific and technical point of view, it is a subject of interest both at the stage of designing a recipe, manufacturing various types of elements and during its operation. Ensuring safe and long-term use of concrete structures and elements requires, among other things, appropriate diagnostics. It can use destructive testing (e.g., by testing the strength of drilled cores [
1,
2]), semi-destructive testing (e.g., pull-out [
1,
3], pull-off [
4,
5] methods) and non-destructive testing (NDT, e.g., using sclerometer tests [
1,
3,
6], thermal imaging techniques [
7,
8], analysis of natural frequencies [
9,
10], stereological investigations [
11], acoustic emission [
12,
13], X-ray tomography [
12], ground-penetrating radars [
7,
14,
15], ultrasound [
1,
3,
7,
15,
16,
17,
18,
19,
20,
21,
22,
23,
24,
25] including ultrasound tomography [
15,
19,
20,
21,
22,
23,
24,
25]). The choice of method depends on the material characteristics that we want or are able to measure. All three types of tests are widely known, but especially NDT, thanks to the introduction of a number of modern measurement techniques in the building industry and intensive research, is becoming more and more popular and reliable. Particularly interesting in this area are ultrasound techniques which use at their basis typical phenomena associated with wave motion physics—e.g., reflection, diffraction, attenuation, change of propagation velocity depending on changes in stiffness and density of the medium. The simplest method in the case of concrete structures is an assessment of the velocity of longitudinal waves between selected points of the tested element—the lower the velocity, the lower the stiffness of concrete and its quality [
16]. However, it concerns the average speed measurement on the section between the ultrasonic transducers. An interesting, practical case of this type of analysis is article [
18] where ultrasonic measurements carried out on a river dam were verified by means of visual inspection of cores taken from it. In the literature, there are also analyses concerning the change of time and intensity of ultrasound wave passing through the area of concrete where a single crack builds up [
17]. The use of such research, however, requires in advance knowledge of where such a defect may develop in an element. On the other hand, tomographic methods are deprived of this type of inconvenience, where only a set of transceiver converters suitable for concrete is required and external access to the tested element on one side in a reflective mode (e.g., Reference [
21]) or with access on two or more sides in a transmission mode (e.g., Reference [
15,
20,
22,
23,
24,
25]). In the latter view, the state of the material is most often shown indirectly by means of reconstructed maps of the propagation velocity of a selected type of ultrasound wave. For the sake of convenience, longitudinal waves are usually selected for this purpose in the unambiguous interpretation of measurements, as they move the fastest and are not dispersed. It should be emphasized that very accurate maps of cracks in the concrete structure can be made, on the other hand, using X-ray tomography [
12]; however, currently, due to the cost of the equipment and the possibility of its use, it is practically impossible to use it directly on real building structures in field research. It is also worth mentioning at this point that, from the point of view of developing mathematical foundations for tomography, its beginning dates back to 1917, when Johann Radon proposed a solution to the problem of reconstruction of the shape of an object on the basis of its projections [
26].
The tomographic imaging concrete elements available in the literature focus mainly on the identification of defects with much lower acoustic resistance than the surrounding concrete: e.g., artificially introduced defects, for research purposes, in the form of inclusions from foamed polystyrene [
21,
22,
23], expanded polypropylene [
25], prisms from cracked concrete [
23] or air-filled pipes [
21], cavities in defectively injected pipes for placing prestressing cables [
15], areas strongly cracked as a result of excessive loads [
20,
22,
24] or freeze-thaw cycles [
19]. Therefore, the first goal that the authors set for themselves in this paper was to carry out an analysis of the extent to which it is possible to detect brittle defects in concrete beams starting from the early stage of their development, when microcracks do not yet form defects capable of effective reflection of waves or their significant slowing down. For this purpose, the methodology of damage mechanics was applied in terms of one of the most recognized concrete models in this field, formulated by Chaboche [
27] and Mazars [
28], and, in the non-local terms, developed by Pijaudier-Cabot [
29,
30,
31]. Then, depending on the degree of brittle damage described in a “fuzzy” way by the damage parameter, it is possible to model the development of a localized decrease in material stiffness and the associated reduction in the speed of sound waves in concrete. This fact can also be used in the tomographic assessment of concrete [
32,
33]. For this reason, in order to reliably calculate the distributions of drop in stiffness and changes in the velocity of the longitudinal wave around the forming crack, the authors of the paper proposed an effective way of identifying the parameters of a non-local model of brittle damage evolution using experimental data from [
34]. These data were then used in computer simulations of tomographic identification of this type of defect in various phases of its formation and were confronted with the results of our own experimental research.
Another important aspect of ultrasound tomography measurements is its accuracy which may be affected by the diffraction of waves when passing through and around areas of different acoustic resistance than the rest of the medium. It is commonly assumed in order to significantly simplify calculations that paths of the fastest wave propagation are rectilinear (e.g., Reference [
15,
19,
20,
21,
22,
23,
24,
35]) which is then called rays. This introduces disturbances in tomographic reconstructions when the actual paths differ strongly from the geometry assumed so far. The studies available in the literature show that this assumption does not cause any disturbances in the location of the damaged areas [
21,
22,
23,
24]. However, the obtained values of wave propagation velocities on the reconstructed maps differ significantly from the actual values at high levels of concrete degradation [
32,
33] or inclusions with significantly different acoustic resistance from the matrix [
25]. In this case, it should be taken into account that according to the Fermat principle, wave disturbance travels from one point to another such a path that needs minimum or maximum time, or the same in comparison to other, adjacent paths [
36], which determines the course of its fastest propagation. As stated in Reference [
25], the first attempt to consider the Fermat principle in ultrasound imaging was made by Johnson et al. [
37]. They proposed the use of the ray-tracing technique which in the case of concrete structures was first adopted in works [
38,
39]. An alternative to this type of approach is the use of graph theory, in particular Dijkstra’s algorithm [
40]. If we apply it in the analyzed issue to a full graph the nodes of which will cover the studied area, and the weights of the edges will be equal to the time of the wave passing through them, then in this way we can approximately determine the shape of paths of the fastest sound propagation and the time needed for the wave to travel along them. The results will be the more accurate the denser the network of nodes. This very interesting concept, inspired by the works of various authors and applied to seismic waves, was developed in Moser’s work [
41] in 1991 (as in Reference [
25]). Extensive studies in this field with examples of calculations using experimental data from concrete cubes with inclusions from expanded polypropylene have been presented in Reference [
25]. A proposal to use this methodology in the ultrasonic testing of structural elements was also presented by the authors in Reference [
33,
42]. In the light of the quoted information, it can be noted that so far there is no analysis in the literature concerning this type of problem in the case of tomographic assessment of the damage evolution described according to the concept of damage mechanics. Therefore, the second aim of this article was to present in this area appropriate numerical analyses with the use of Dijkstra’s algorithm in determining shape of the paths of the fastest ultrasound wave propagation. On this basis, the author’s own method of improving the accuracy of tomographic calculations was formulated because of the inconsistency of the assumptions with reality in the case of using straight-line rays to approximate the geometry of the fastest propagation paths. For this purpose, it is proposed to not interfere with the assumption of straightness of ultrasound pulse pathways but, on the other hand, to properly scale the measured times of their propagation between the assumed transceiver points elongating them in the case of rays that pass through elastically degraded areas. The advantage of such an approach is that it does not complicate well established mathematical methods (e.g., Reference [
35,
43,
44,
45,
46]) which have been implemented in tomographic imaging techniques.
The paper also raises the practical aspect of conducting such measurements by analyzing in the light of the presented arguments how the accuracy of results may be affected by the introduction of the so-called fictitious transceiver points for which the times of propagation of ultrasound waves are interpolated on the basis of measurements from the real points. In this respect, the authors were inspired by work [
47] where this approach was presented in the study of moisture distribution in walls. It may significantly reduce the number of points used and the labor intensity in real measurement situations, which is particularly important in the case where fewer ultrasonic transducers are available.
Due to the scope of studies within the framework of the presented calculation examples and experiments, the authors limited themselves to the case of concrete beams with elastically degraded zones perpendicular to the beam axis. All the calculations made in the article were done with the use of the authors’ computer programs written in the MATLAB software environment.
2. Ultrasonic Transmission Tomography
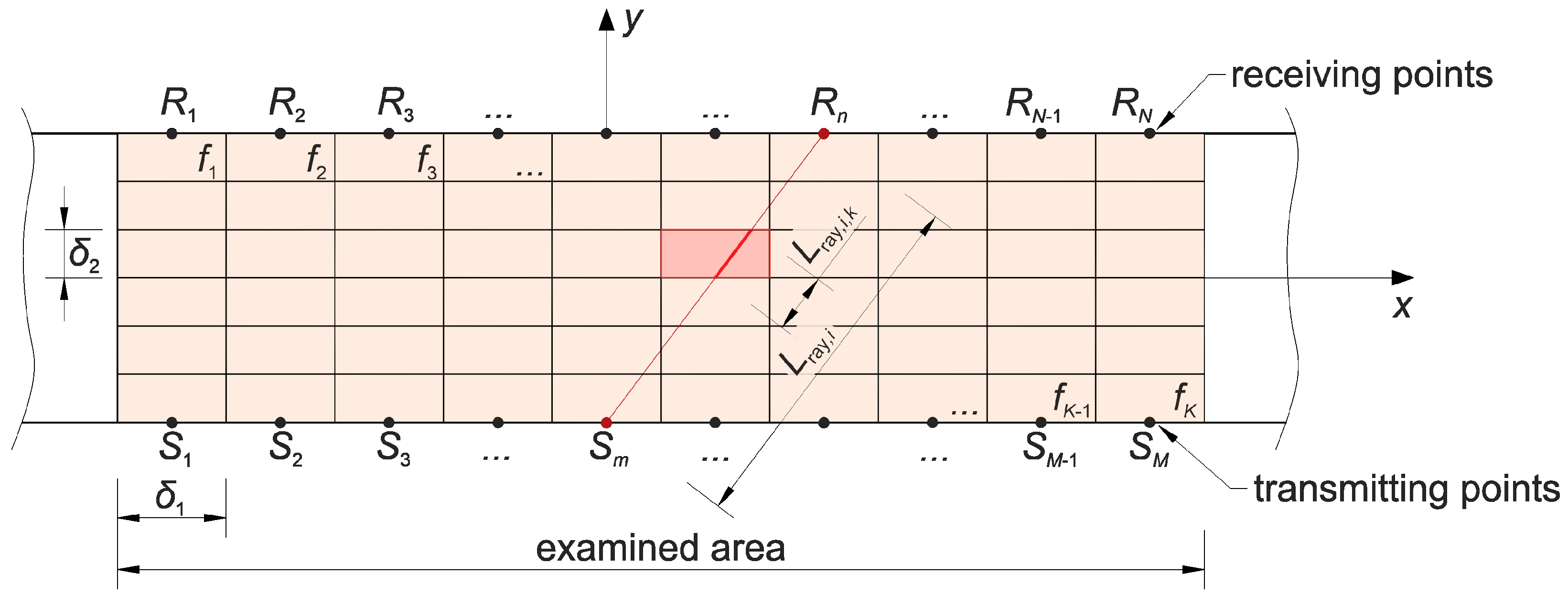
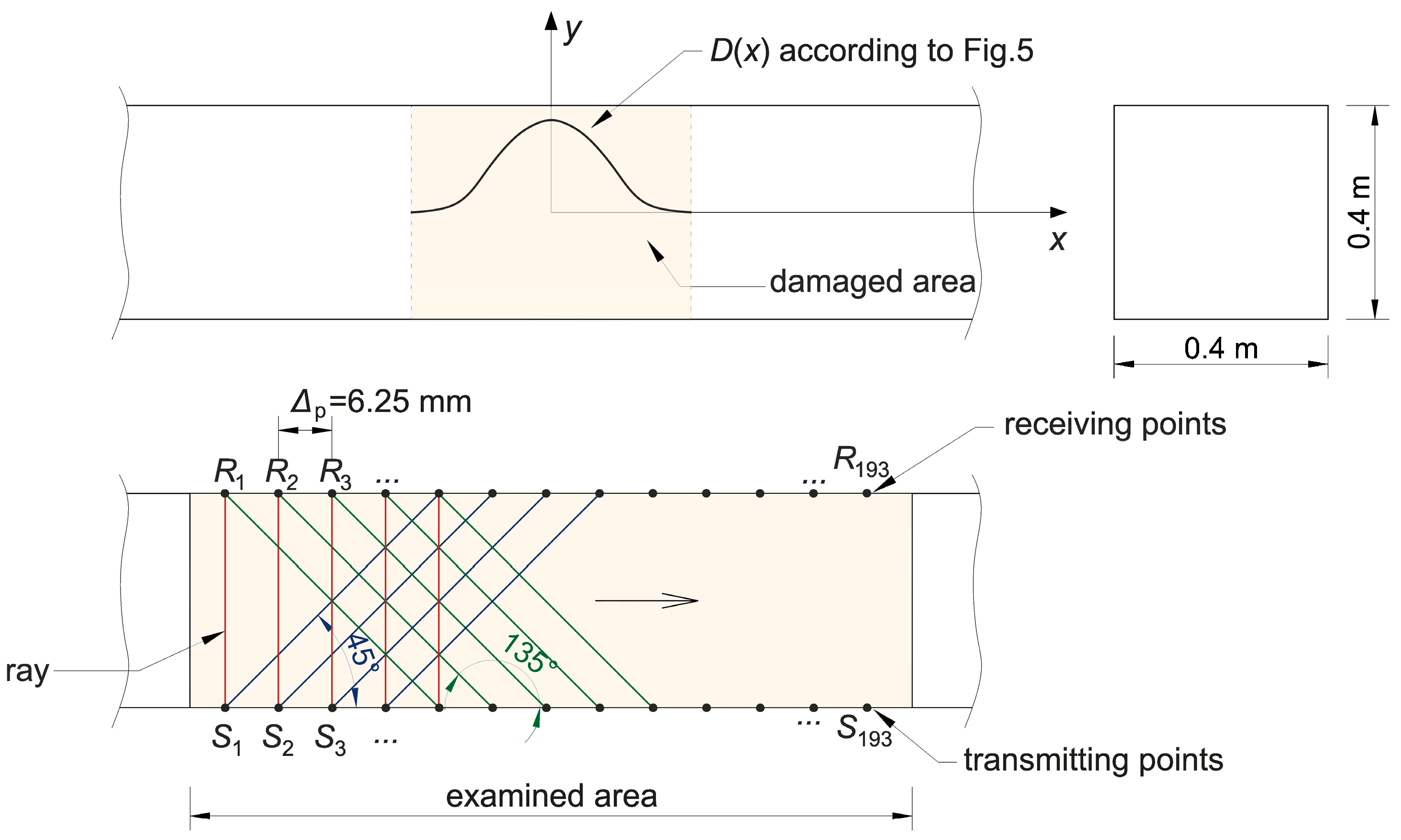
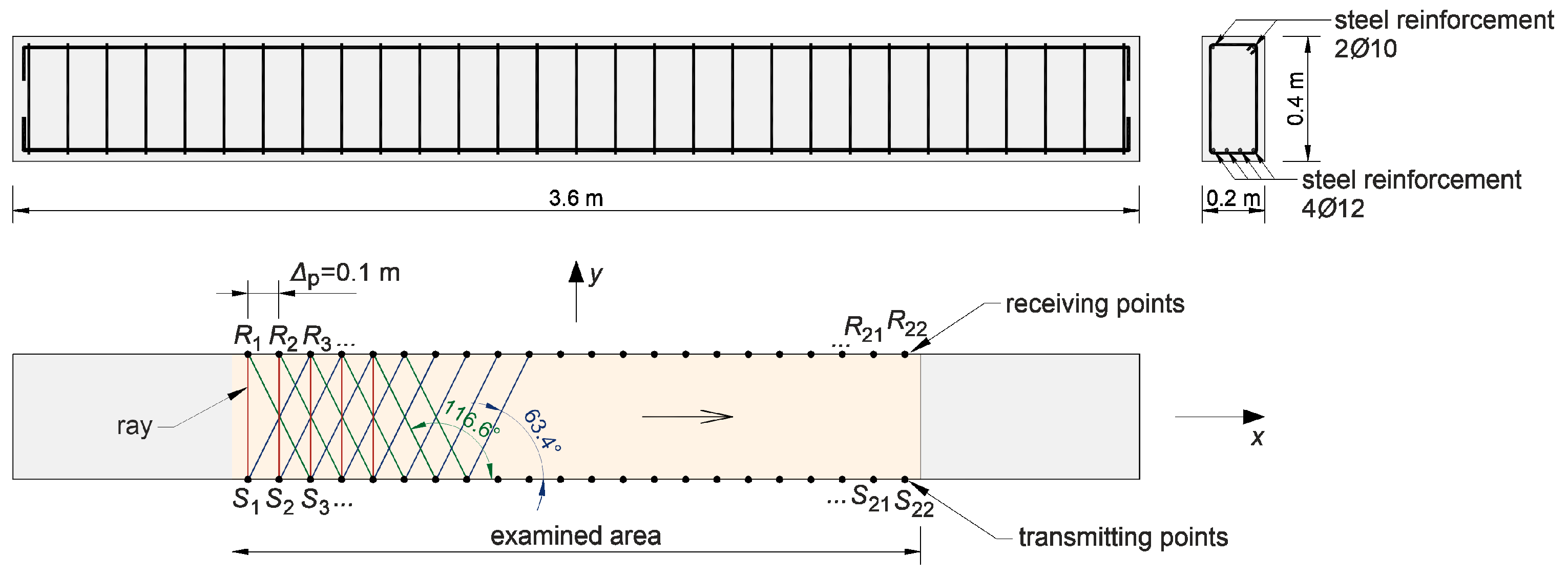
The considerations presented in the paper concern the case of concrete beams that contain elastically degraded zones (in the form of grouped micro-cracks or cracks) running across the entire cross-section—e.g., as a result of simple bending or tension. Therefore, tomographic analyses were narrowed down to the identification of brittle damage in a flat longitudinal section of beam which will also be the plane of symmetry of this element, focusing on the assessment of changes in the speed of ultrasonic waves due to a local change in the stiffness of the cracked material. For this reason, in all computational examples and experimental studies presented in the paper, a system of opposite transmitting/receiving points of ultrasound waves in the transmission mode was used (
Figure 1). Longitudinal waves have been selected as non-dispersive and the fastest of all ultrasonic wave types for the study. This requires, however, that their length should be small enough in relation to the dimensions of the cross-section of the element to be effectively generated (practical recommendations in this respect can be found in, e.g., Reference [
48]). On the other hand, it limits the distance between the intended transmitting/receiving points because of the attenuation of the longitudinal waves and the angle at which they may propagate from the transmitting point in an effective manner in reception because of the amplitude distribution. In the latter case, on the basis of individual experiences of the authors, the angle of inclination of diagonal rays to a bar axis was limited to range from 45° to 135°; in Reference [
33], a numerical simulation of the process of propagation of ultrasounds during its excitation by the transducer was performed where it was shown that the amplitudes of longitudinal waves are negligible in contrast to transverse waves outside this angular range, which may result in incorrect and increased propagation time reading.
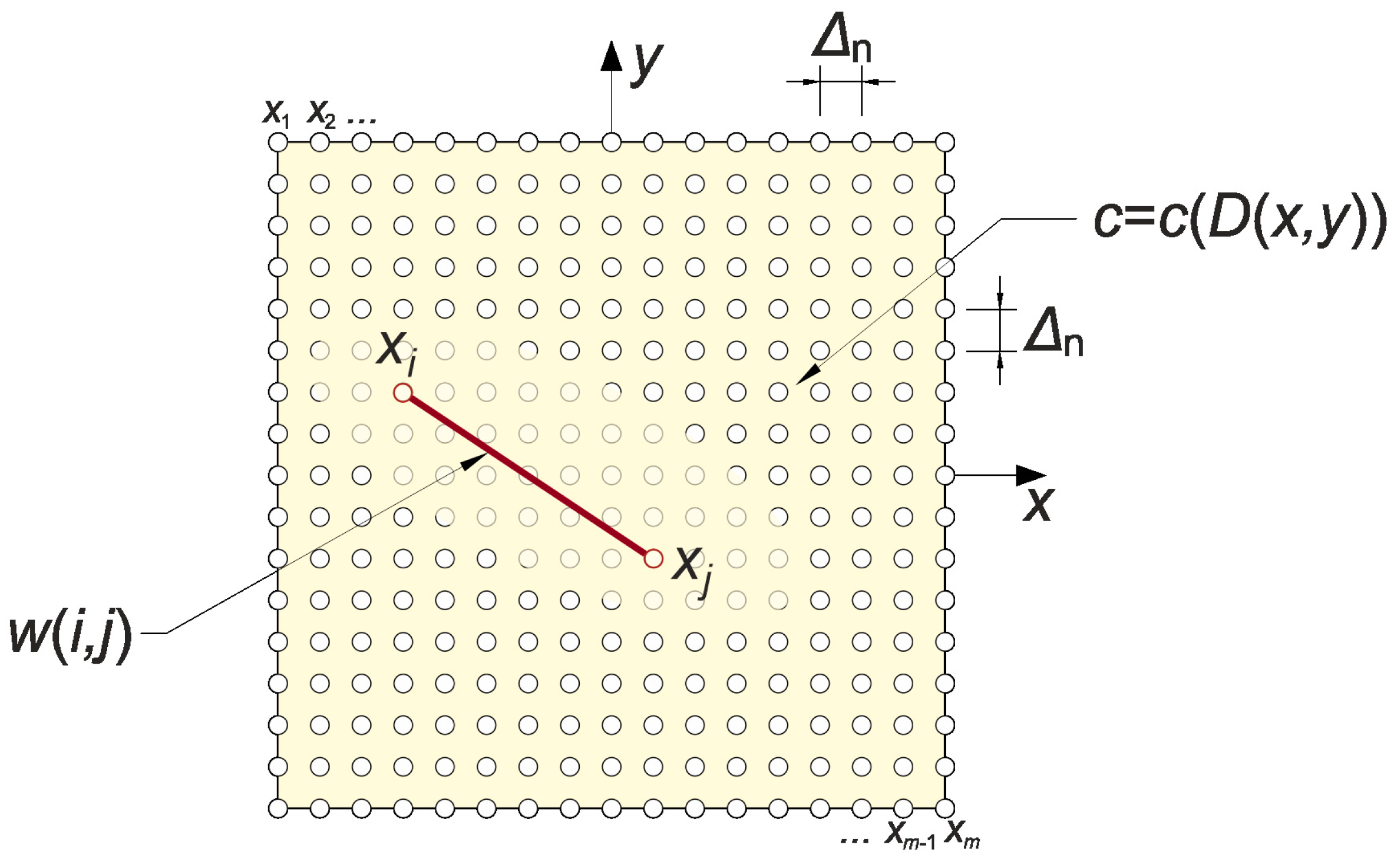
From the mathematical point of view, by indirect visualization of the material structure by means of maps of distributions of quantities characterizing the propagation of ultrasound waves, it is necessary to build an appropriate system of equations (e.g., Reference [
35]). The plane problem assumes that the reconstructed image consists of a finite number of plane cells which, in the examined area, is separated by an orthogonal grid of a step of
(
Figure 1). The function is searched for in an approximate way:
where:
—longitudinal wave velocity (m/s);
,
—spatial variables (m). For this purpose, it is assumed that
in each cell takes a constant value of
where
.
In the problem, the longitudinal wave propagation times between the selected sending (
) and receiving (
) points must be given where
;
. It is assumed to simplify considerations that the fastest propagation path between these points can be modeled as a straight line, which in tomography is referred to as a ray. The propagation time of
(s) over the
-th ray, connecting points
and
, can be calculated from the integral:
where:
—variable describing the position on the
-th ray (m);
. Considering that averaged values
are being sought in the cellular areas, we can write that:
where:
—parts of the length of the
-th ray falling on the
-th cell (m) (if the ray does not pass through cell
, then
),
(m),
(s/m),
(s). The above is the definition of a system of equations in relation to the value of
, which is used to determine the velocity distribution of ultrasound wave propagation in tomography. After its solution, we get that:
where
—mean velocity of the longitudinal wave in the
-th cell (m/s) (in the sense of the presented method). Please note that
(the number of rays used) must not be less than
(the number of the assumed cells) and the rays must evenly cover the test area. The system of equations formulated in such a way is an ill-conditioned one, which forces the use of iterative techniques of its solving. The basic method in this respect is an algorithm developed by the Polish mathematician Stefan Kaczmarz (1937). In 1970, Gordon and his collaborators, working on the application of this technique in medicine, rediscovered this method and named it Algebraic Reconstruction Technique (ART) [
43]. It was this one that was used in the first in the world computed tomography scanner constructed by Hounsfield in 1972 [
44]. On the basis of the Kaczmarz algorithm, many other methods were developed. Currently, the literature distinguishes three basic ways of imaging: the aforementioned ART, Simultaneous Iterative Reconstruction Technique (SIRT), and Simultaneous Algebraic Reconstruction Technique (SART) which is a combination linking the advantages of the ART and SIRT methods [
35,
46]. For this purpose, the Tikhonov regularization method can also be used in the method of least squares (e.g., Reference [
24]).
In this article, all tomographic images presented below were solved with the use of a randomized Kaczmarz algorithm. The final result was taken as
, i.e., the mean of
independently obtained solutions of equation system (3). Hence:
In a given solution
, its subsequent approximations were made by projecting the previous approximation in a direction perpendicular to the randomly selected straight lines defined by the equations of system (3), but so that each of these lines would be used only once. The starting point for the iteration of each
was the vector:
where
—reference value of the longitudinal wave velocity (m/s). The number
of the averaged solutions of equation system (3) were selected so that the condition was met:
As mentioned in the introduction, another inconvenience of the presented method of tomographic imaging is the fact that ultrasonic waves are diffracted when avoiding areas with different acoustic resistance, so that the real paths of the fastest propagation are curvilinear. This is one of the basic sources of inaccuracy of the presented approach if there are sub-areas with significantly different acoustic resistances in the tested concrete element in relation to the rest of the element [
25,
32,
33]. These issues will be discussed in the context of the following calculation examples and experimental studies concerning the detection of elastically degraded concrete zones.
3. Localized Elastic Degradation in Concrete—Crack Model in Concrete According to the Damage Mechanics
In concrete, due to its brittleness, the evolution of damage occurs in particular at the action of tensile stresses [
27,
28,
29,
30,
31]. The process begins with the formation of microcracks which, with further increase in stress, grow into localized damage zones and cracks visible to the naked eye. For this reason, the presence of such zones at the final stage can be easily detected visually, as they contain cracks of the order of tenths of a millimeter in width. On the other hand, they are not visible at an early stage of development, and what is important, the initial microcracks usually do not occur in random places of concrete structure. When the cementitious material structure develops, the high and low internal cohesion zones can be distinguished. Especially, the places with low cohesion are the ones where cracks begin to grow because, in such places, even a small amount of released energy causes their propagation. They form mainly around the micro-pores or near the phase separation surfaces [
11]. From the analyses presented in this respect within the damage mechanics, it is known that this process obviously leads to elastic degradation of concrete, which means a local decrease in material stiffness [
27,
28,
29,
30,
31,
49]. This phenomenon gives grounds for detection and control of this type of damage by ultrasound tomography if the spatial distribution of propagation velocity of a selected type of mechanical waves (e.g., Reference [
24,
33]) is assessed within such a framework. That is why, in the article, the preliminary calculations were oriented on determining the spatial distribution of concrete stiffness change in the case of localized damage under tension. The necessary information was obtained in this way in order to analyze the propagation of ultrasound waves in a localized elastically degraded concrete zone which evolution leads finally to forming macro-cracks. The calculations were performed using the assumptions of one of the most popular models in this respect, introduced by Chaboche [
27] and Mazars [
28], which takes into account the weakening of the material due to the isotropic damage accumulation and which was developed by Pijaudier-Cabot [
29,
30,
31] in non-local terms. In a uniaxial tensile state, the model assumes the following relationship between stress and deformation (using the principle of strain equivalence):
where:
—tensile normal stress (Pa);
—normal strain [-]
—Young’s modulus in undamaged material (Pa);
—damage parameter [-]. Due to thermodynamic limitations of the process, the following must be satisfied:
where:
,
—material parameters [-];
—load function [-];
—variable describing the process of material weakening [-];
—initial value of the variable
[-];
—non-local equivalent tensile strain [-]. To simplify the problem, if we assume that pure tension occurs in a concrete element with its axis described by variable
(m), the non-local equivalent strain at point
will be defined as:
where:
—local equivalent tensile strain [-];
—local principal strain [-];
—representative volume of the material (m
3),
—variable describing the position along axis
(m);
,
—starting and ending point of the considered element (m);
—cross-sectional area of the element (m
2);
—the characteristic dimension of the non-locality or the so-called internal length (m);
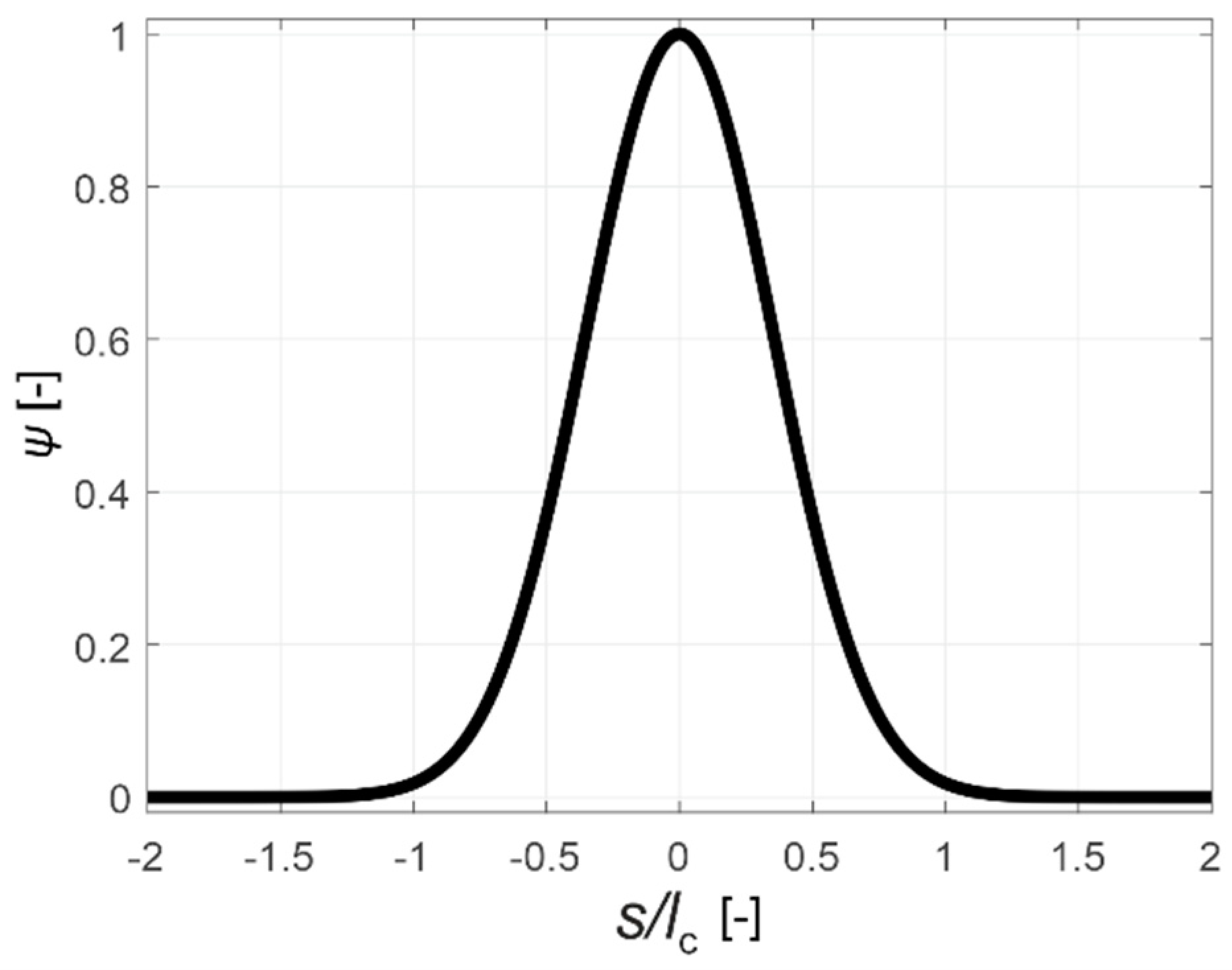
—weight function [-];
—Macauley’s operator. Variability of function
is adopted in the model identical to the normal distribution with standard deviation
. It also means that the range of the non-locality practically ceases to be significant above the distance
because
(
Figure 2). In addition, in the case of uniaxial tension,
where
is the normal strain along the axis of the beam,
will be equal to this deformation at the moment of initiation of the damage evolution, and
can reach a maximum value of
where
is the tensile strength. In the incremental version needed for the numerical analysis of the problem, the stress and damage evolution Equations (8)–(10) take the following forms:
where:
—the finite increment of a given quantity.
A separate issue related to the use of the discussed model is the adoption of appropriate material parameters that will enable the most accurate capture of the real behavior of concrete. The authors in paper [
31] give the approximate typical ranges of these parameters in case of concrete of moderate strength, i.e.,
GPa,
,
,
, and
where
is the maximum size of the aggregate. However, so far, there are no exhaustive items in the literature devoted to research and formulation of automatic optimization calculation techniques allowing for precise estimation of all parameters mentioned above for a given type of concrete due to the length
. It is assessed using mainly the scale effect and the model is calibrated by a manual trail-and-error method (e.g., Reference [
31,
49,
50]). For this purpose, a suitable coefficient inverse problem is formulated in this article which uses illustratively the data from [
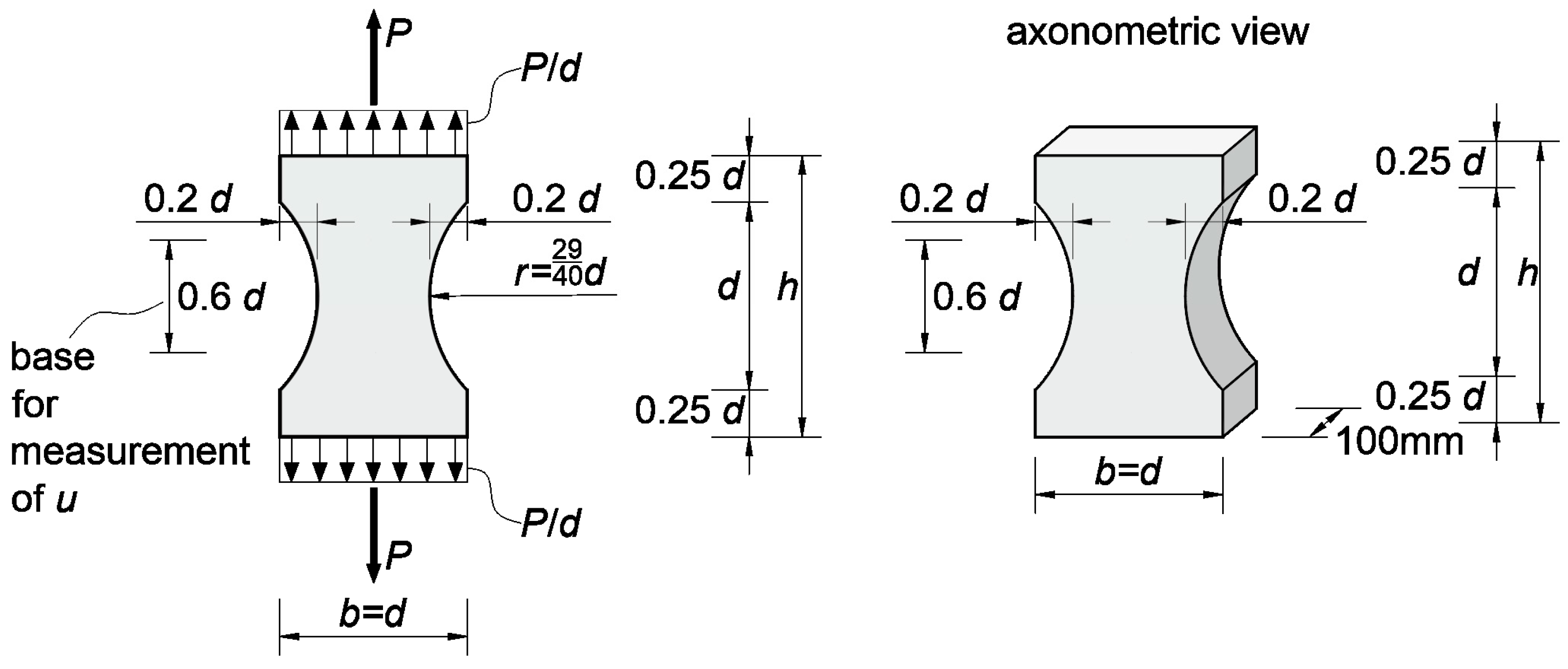
34]. These tests concern the uniaxial tensile testing of a series of “dog bone” shaped concrete specimens of mean compressive strength
MPa and
mm. The scheme of specimens is shown in
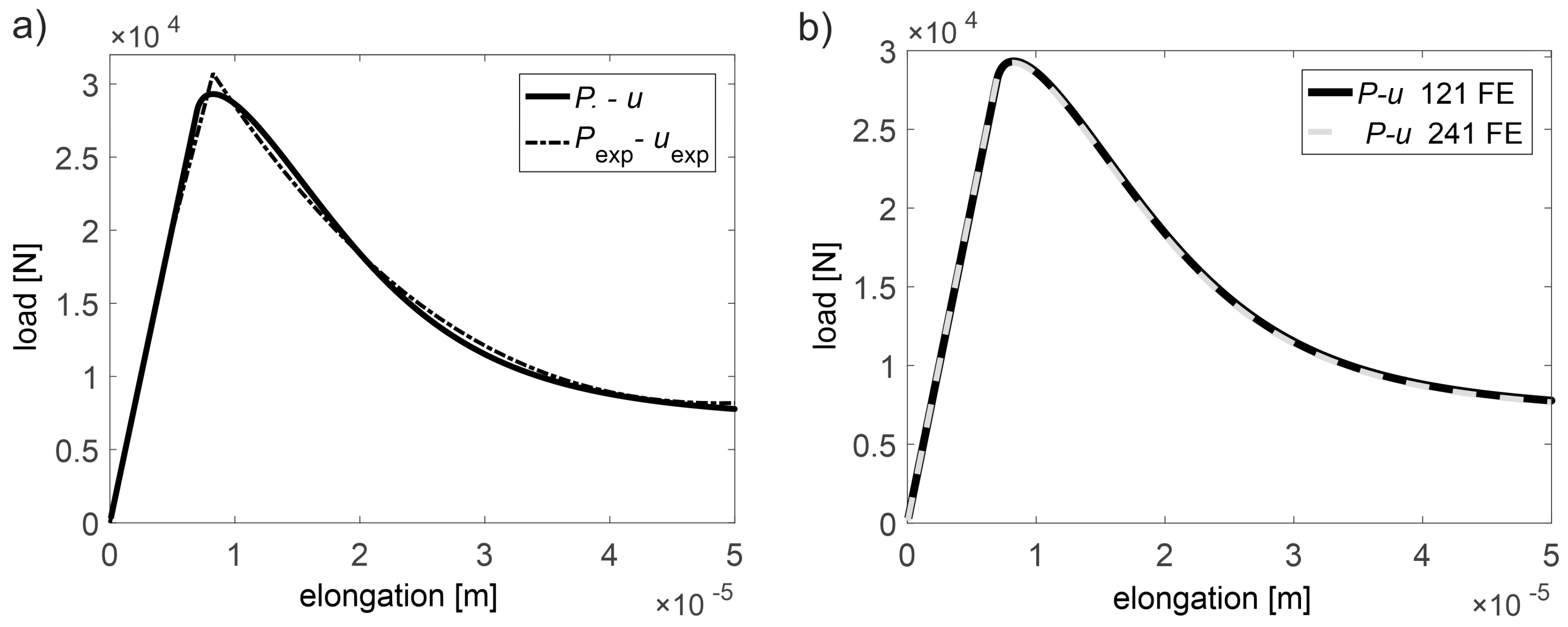
Figure 3, and the experimental load-elongation dependencies (
-
) of a selected series of specimens of an overall length of
cm within a range of up to
μm are shown in
Figure 4a. This relation was obtained on the basis of digitalization of graphs presented in Reference [
34], and due to their quality by entering the curve in the middle area formed by the envelope of all several curves measured on the specimens of the length of
cm. For calculations, data from this series of samples were selected from all 7.5 cm, 15 cm, 30 cm, 60 cm, 120 cm, and 240 cm length series, which were tested in Reference [
34], because in their case the relatively highest number of measurements was obtained with possibly small scatter of measured tensile strength. On the other hand, samples with a length of 7.5 cm were characterized by the largest scatter of measurement results on the basis of which the authors of [
34] concluded that the width of their smallest section is smaller than the length
and it can be larger. For this reason, its value was suggested as
. The elongation measurement base was 0.6 times the notch length in the specimen (
Figure 3). It should be noted at this point that a very interesting analysis of the development of elastically degraded zones based on the data from work [
34] was also presented in Reference [
50] but without formulating a coefficient inverse problem.
The tests included in Reference [
34] were also selected for analysis due to the fact that the shape of the specimens enables, in tension, the location of the brittle damage zone in their middle area, leading to the formation of a single macro-crack when the load capacity is exhausted. In the considerations, for the sake of simplification, a bar in tension of variable cross-section was used as a model of specimens, according to their geometrical features. This choice was dictated by the need to carry out the calculation procedures described below in an acceptable time frame due to the computer hardware available (PC with a processor
GHz and RAM
GB—time of solving one task approximately
min). The boundary problem analyzed was solved using the finite element method (FEM) in an incremental version using physical Equations (15),(16). Two-node bar finite elements with 2 degrees of freedom and constant and averaged over the length physical and geometric features (with one integration point in the middle of the element) were used. One hundred and twenty-one finite elements were adopted on the axis of the specimen of the length of
cm. In addition, the load increments of the specimen were assumed to be continuously elongated during the calculation, which meant switching the force sign at the transition to the weakening phase. The force increment, in turn, was selected in each step so that the increments in elongation of the measuring base and normal strain in each of the elements would not exceed, respectively, the values of
μm and
. Taking into account the above mentioned conditions of calculations allowed to obtain a satisfactory convergence of the solution. Further increase of the number of elements and decrease of permissible increments of strain and displacements did not significantly affect the result (
Figure 4b).
First,
was estimated by adjusting the slope of the initial straight-line section to the measuring point
= [
kN,
μm] in the load-elongation relation (
-
) obtained from the model in the elastic range. The calculus procedure in this case was realized using ordered domain search. Hence, it was determined that
GPa. Other parameters, i.e.,
,
,
, and
were estimated by minimizing the objective function:
where:
—specimen loads from the experiment (N) determined in the weakening phase (
Figure 4a) for elongations at equidistant intervals starting from
μm (for
kN—i.e., maximum load) to
μm (for
kN);
—equivalents
determined on the basis of the assumed model (N);
—vector of variables corresponding to the parameters searched for, i.e.,
,
,
, and
, respectively. On that basis, it was assumed that:
The calculations in formula (17) assumed
. The minimization of the implicit function (17) was carried out in three stages. In the first stage, a genetic algorithm was used on a population of 20 parameter vectors
in 20 selections. The vector components of the first population were drawn in preselected intervals:
of
,
of [
],
of
and
of
, where
[m
2] is the minimum cross-sectional area of the specimen at the center of its length; hence,
. It should be noted that the upper limit of interval selected for
is greater than that given in Reference [
31,
34]. The authors assumed finally the value
as the first smallest one for which the genetic algorithm did not estimate placing the minimum point of
right next to the upper limit of
. Subsequent generations of the population were created as follows:
with the lowest value of
passed unconditionally to the next generation, the next 10 new vectors
were obtained by arithmetic crossover of randomly selected
from the group of the first 14 vectors of the old generation after their ordering from the lowest to the highest value of
. The set of the last nine new vectors
were drawn in the same way as in the first generation. This procedure was repeated independently five times. In the second stage, the same procedure as in the first stage was followed, however, changing the draw intervals of vector
components. The boundaries of them were defined from
to
of the the values of the
vector components for which the lowest value of
was obtained in stage one. In the third and final stage, an orderly search of the domain of acceptable solutions was performed in the vicinity of the point defined by the vector
components with the lowest
-value found in the second stage. The search interval was selected from
to
of the values of the parameters of this vector. If the minimum
in this area was at the boundary of any interval, the procedure was repeated where the point with the current minimum value
determined the midpoint of the intervals in the next step. In this way, the following values of the parameters of the concrete damage evolution equations were obtained:
,
,
and
mm while the objective function
reached the value
N
2. This outcome corresponds to the global mean square relative error
which expresses matching the experimental curve to the theoretical one in the weakening phase. In
Figure 4a, the experimental curve and model one for the determined parameters were compared.
Figure 4b also shows the course of the model curve after increasing the number of elements to 241 and reducing the permissible increments of measurement base elongation and normal strain to the value of
μm and
, respectively, to confirm the correctness of the calculations from the point of view of ensuring the convergence of the solution. In this case, the mean square relative difference between the solutions in the weakening phase with dense and rare discretization amounted to
where in the subscripts the number of elements used is given. On the other hand,
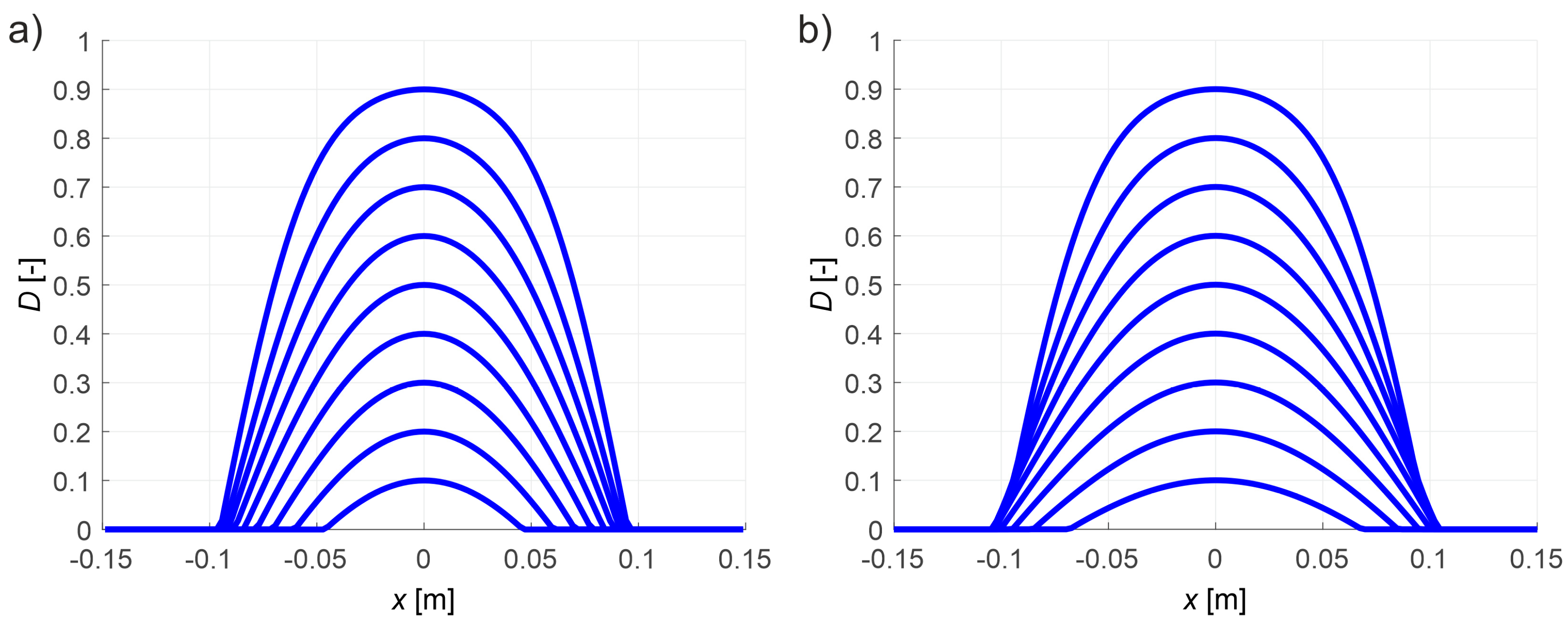
Figure 5a shows the distribution of the damage parameter
at its different maximum values along the axis of the specimen at its middle section during the growth of the localized damage. It is also an equivalent way of modeling the development of macro-crack formation from the point of view of damage mechanics [
30,
49]. The
-distributions with a proportional 2-fold increase of all dimensions of the specimen model (
Figure 5b) with the same values of parameters determining the accuracy of the solution were also calculated in a comparative way. A very similar variability of individual distributions was obtained, while the maximum width of the equivalent macro-crack zone reached a value approximately equal to
. This confirms the correctness of the presented method of modeling the localized damage evolution in the case of tension in concrete. The presented considerations also justify the adoption of a specific resolution in tomographic imaging by means of wave velocity maps, i.e., dimensions
and
, according to
Figure 1. In an extreme case, they should not be greater than
, however, in order to ensure adequate image sharpness and precise identification of the degree of damage, they should be adequately smaller. Taking into account the variability of the distribution
, it is reasonable that
and
were assumed in the interval of approximately
. The presented result also shows that the knowledge of the value of
is crucial for the correct assessment of the distribution of damage around the crack in ultrasound tomography, and, on the other hand, it is the tomography that can be used for the direct assessment of this value.
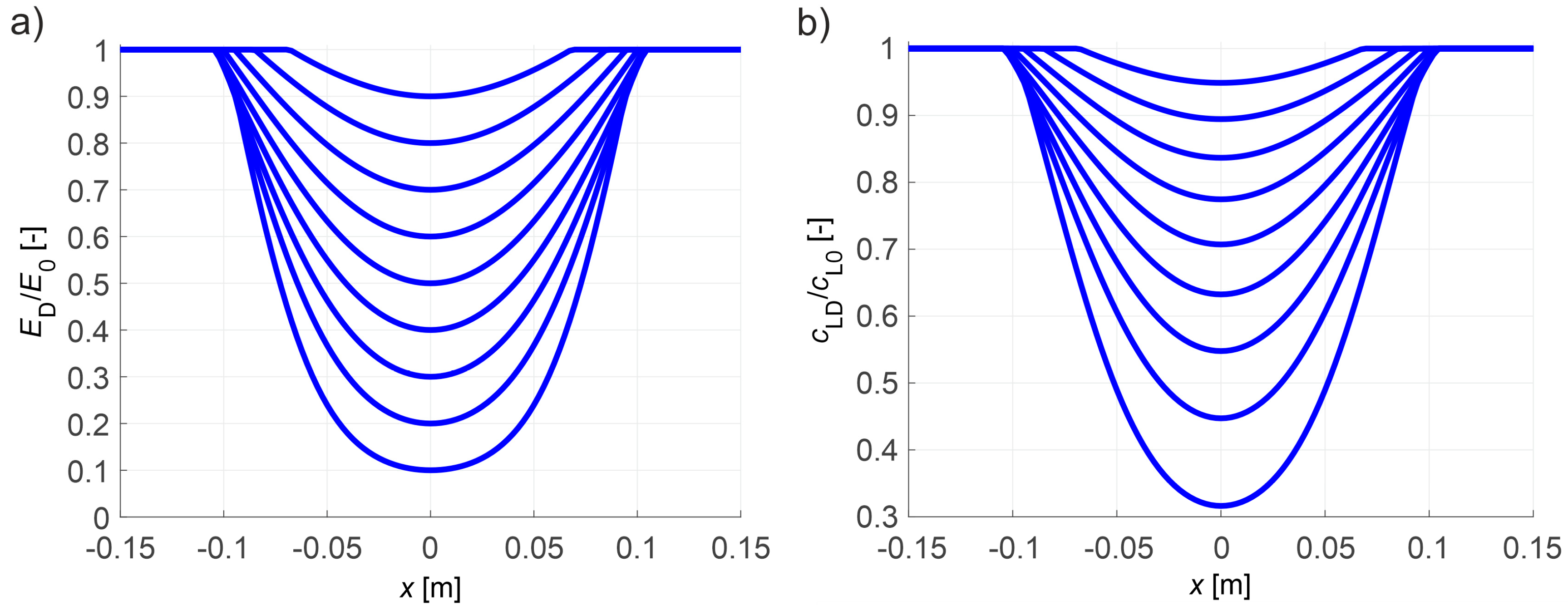
Given that the growth
according to relation (8) causes the decrease of Young’s modulus of the material, i.e.,:
where:
—tangential Young’s modulus (Pa) of the damaged material during inactive growth of the damage, it is in its micro-cracked zones that the velocity of ultrasound waves decreases. Hence, based on the simplified isotropic damage evolution model for concrete developed in Reference [
27,
28,
29,
30,
31] for three-dimensional stress state and assuming negligible change in material density during the evolution of brittle damage, the following estimated relationships can be given:
where:
,
—the velocity of the longitudinal wave in the virgin and damaged material, respectively, (m/s). Based on relations (19), (20), variabilities of Young’s modulus and longitudinal wave velocity are shown in
Figure 6 which correspond to the damage parameter distributions from
Figure 5b. They will be used in the computational examples presented in point 4 that illustrate the problem of tomographic detection of cracks in concrete members at various stages of their evolution.
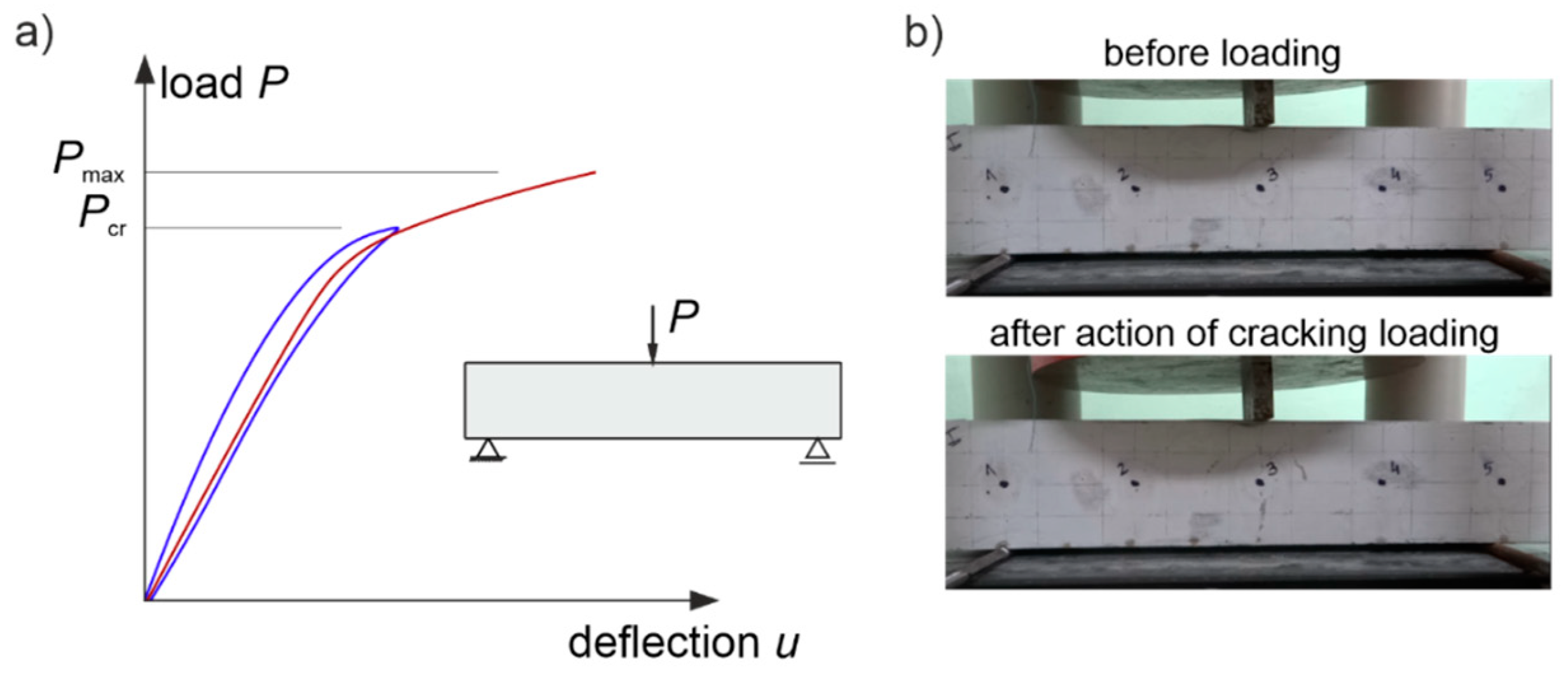
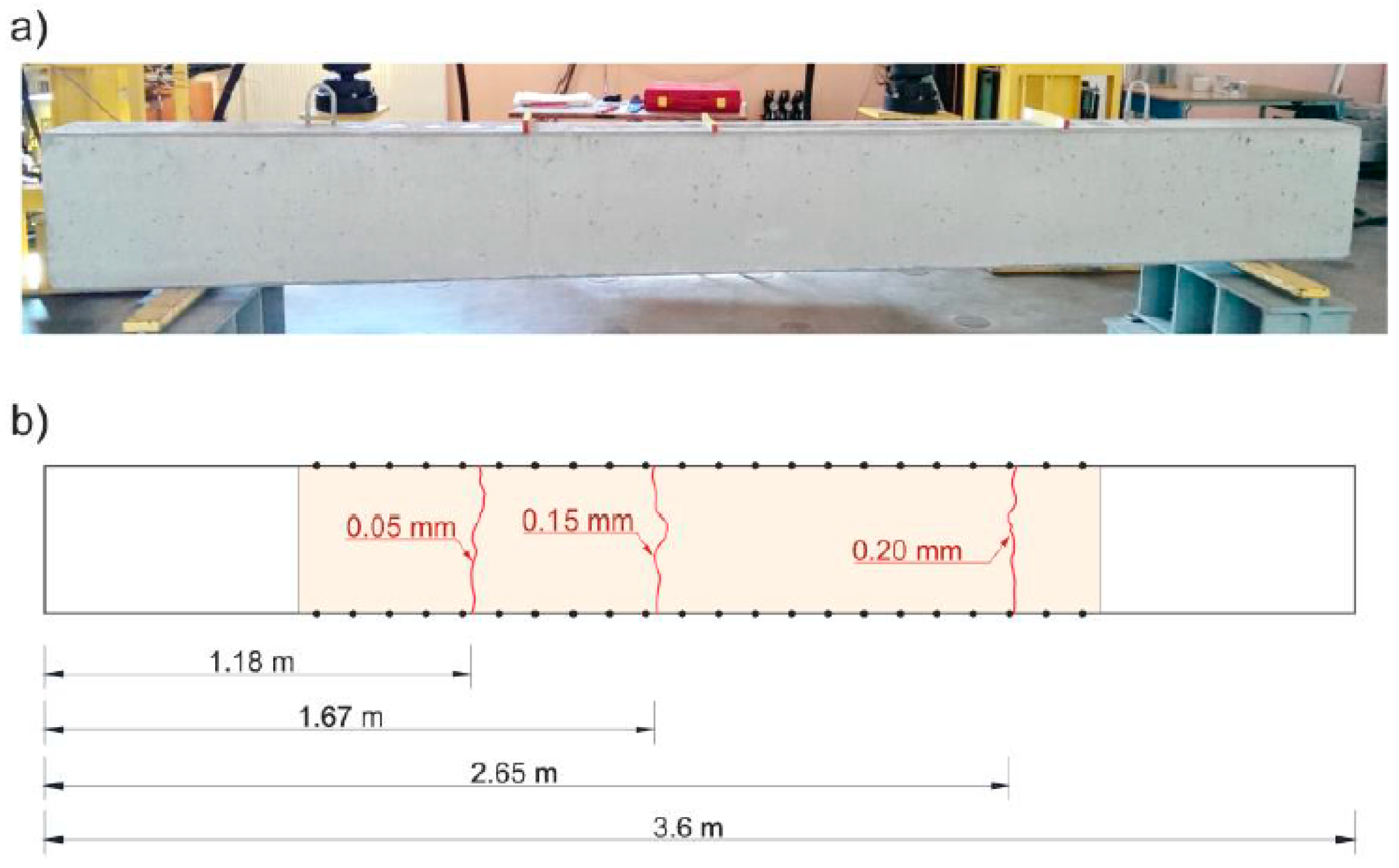
It needs to be highlighted that the numerical results presented in this point can be directly used only in the case of pure tension in concrete. However, they can be also generalized usefully for the case of bent reinforced concrete (RC) beams when estimating the damage level in concrete of such beams with the following simplifying assumptions: the planar cross-sections of RC beam remain planar after loading (as in Bernoulli–Euler theory), failure of the concrete is determined by the normal cross-sectional stresses, and the average normal strains along beam axis are equal in the bonded reinforcing longitudinal bars and surrounding concrete. These assumptions are also commonly used in the design of RC beams, for example, as described in the EN-1992-1-1:2004 standard. Under the mentioned conditions, the results shown in
Figure 6 can be also applied to a damage estimation of individual fibers of RC beam. The authors used the numerical results in this way for damage level estimation of experimentally tested RC beams in point 5.






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}