From Complex Modulus E* to Creep Compliance D(t): Experimental and Modeling Study



Abstract
:Highlights
- The use of rheological models is a very simple and good method to predict creep compliance D(t) from complex modulus E(ω).
- Creep compliance from direct tensile and direct compression tests are the same and are more representative to the field.
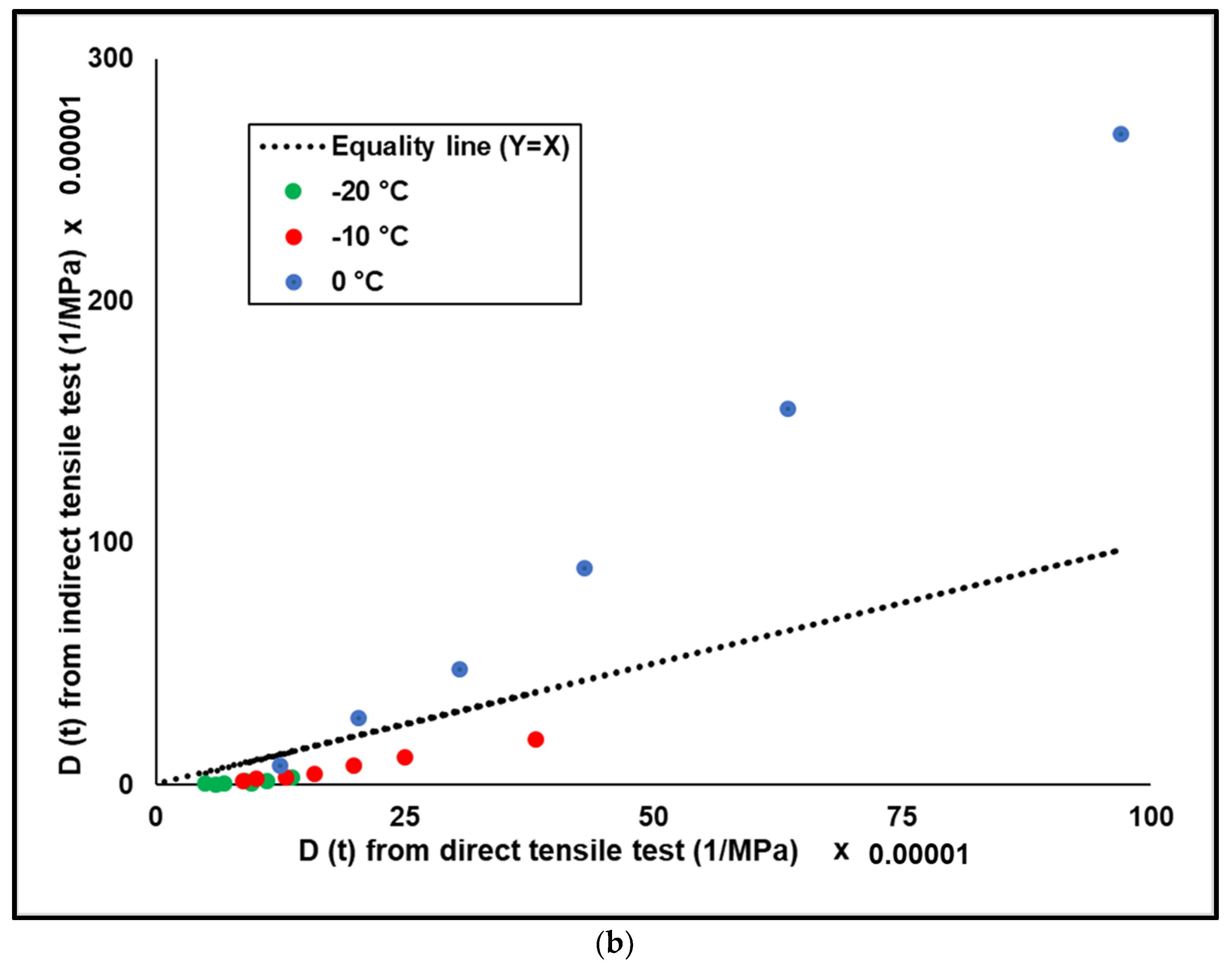
- The IDT creep test configuration allow to measure parallel creep compliance which is not representative with thermal cracks observed in the real roads.
- Direct creep compliance tests are easier to perform comparing to the IDT configuration proposed by AASHTO T322-07.
1. Introduction
| D(t): | creep compliance at time t (1/kPa). |
| GL: | gauge length in meters (mm). |
| Davg: | average diameter of all specimens (mm). |
| bavg: | average thickness of all specimens (mm). |
| Pavg: | average creep load (kN). |
| ΔXtm,t: | trimmed mean of the normalized horizontal deformations of all specimen faces at time t (mm/mm). |
| Ccmpl: | correction factor. |
| : | absolute value of the ratio of the normalized, trimmed mean of the horizontal deformations (i.e., ΔXtm,t) to the normalized, trimmed mean of the vertical deformations (i.e, ΔYtm,t) at a time corresponding to ½ the total creep test time for all specimen faces. |
| E*(ω): | complex modulus (MPa). |
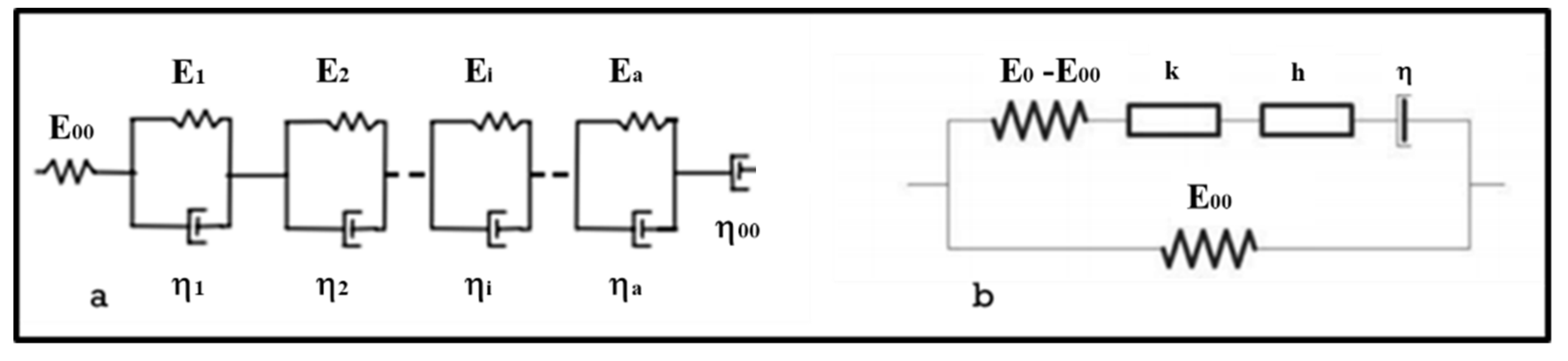
| E00 and η00 | value of the complex modulus and the viscosity when ωτ → 0. |
| ω: | is the angular frequency, so that ω/2π is equal to the frequency. |
| ηi and Ei: | viscosity and elastic modulus of each Kelvin Voigt branch. |
| D(t): | creep compliance (1/MPa). |
| τ: | is the relaxation time for single branch. |
- E0 is the value of the complex modulus when ωτ →∞.
- δ, k and h are dimensionless constants and β is a dimensionless parameter, related to Newtonian viscosity η.
2. Methods and Materials
2.1. Methods
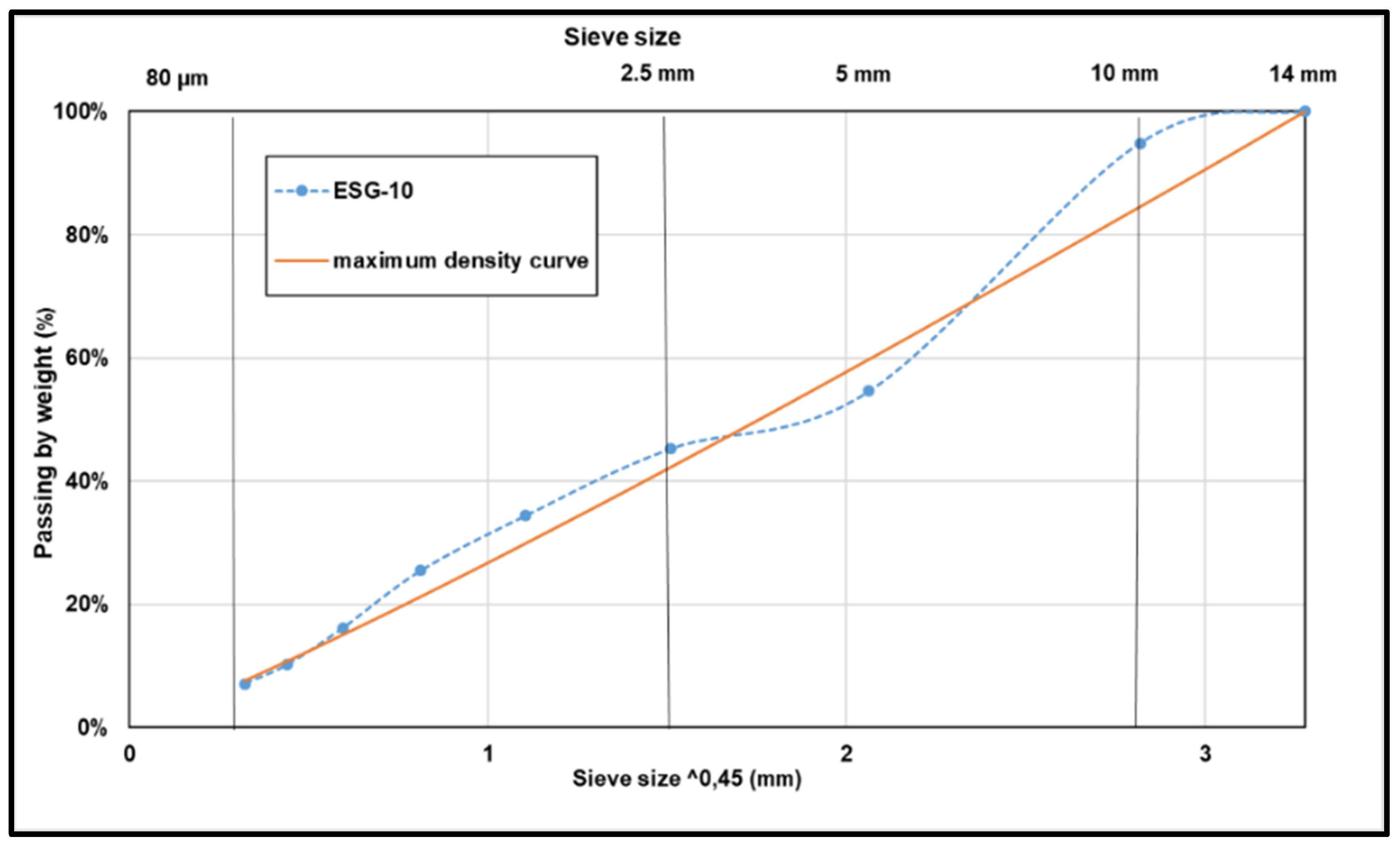
2.2. Materials
3. Results and Discussion
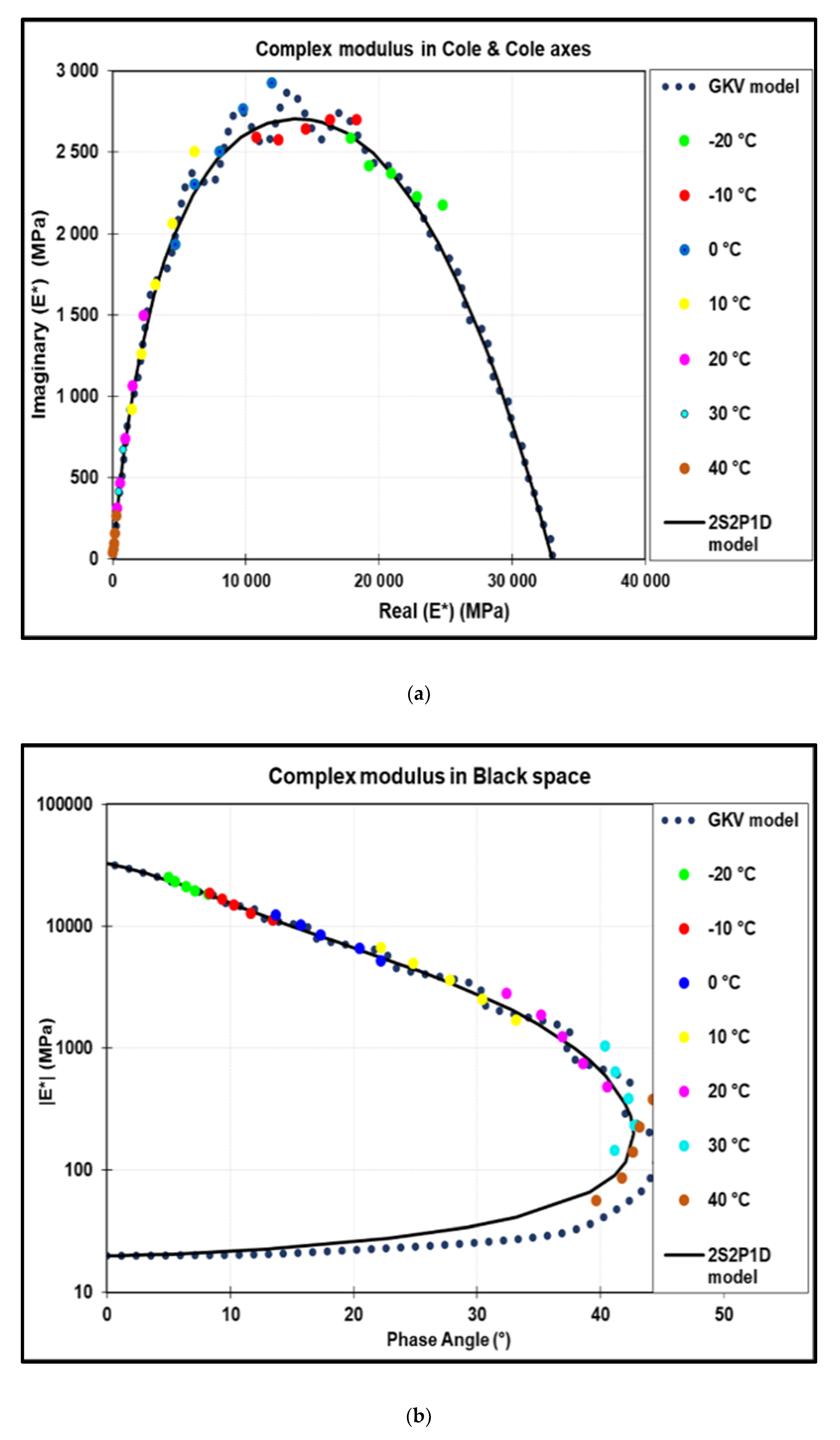
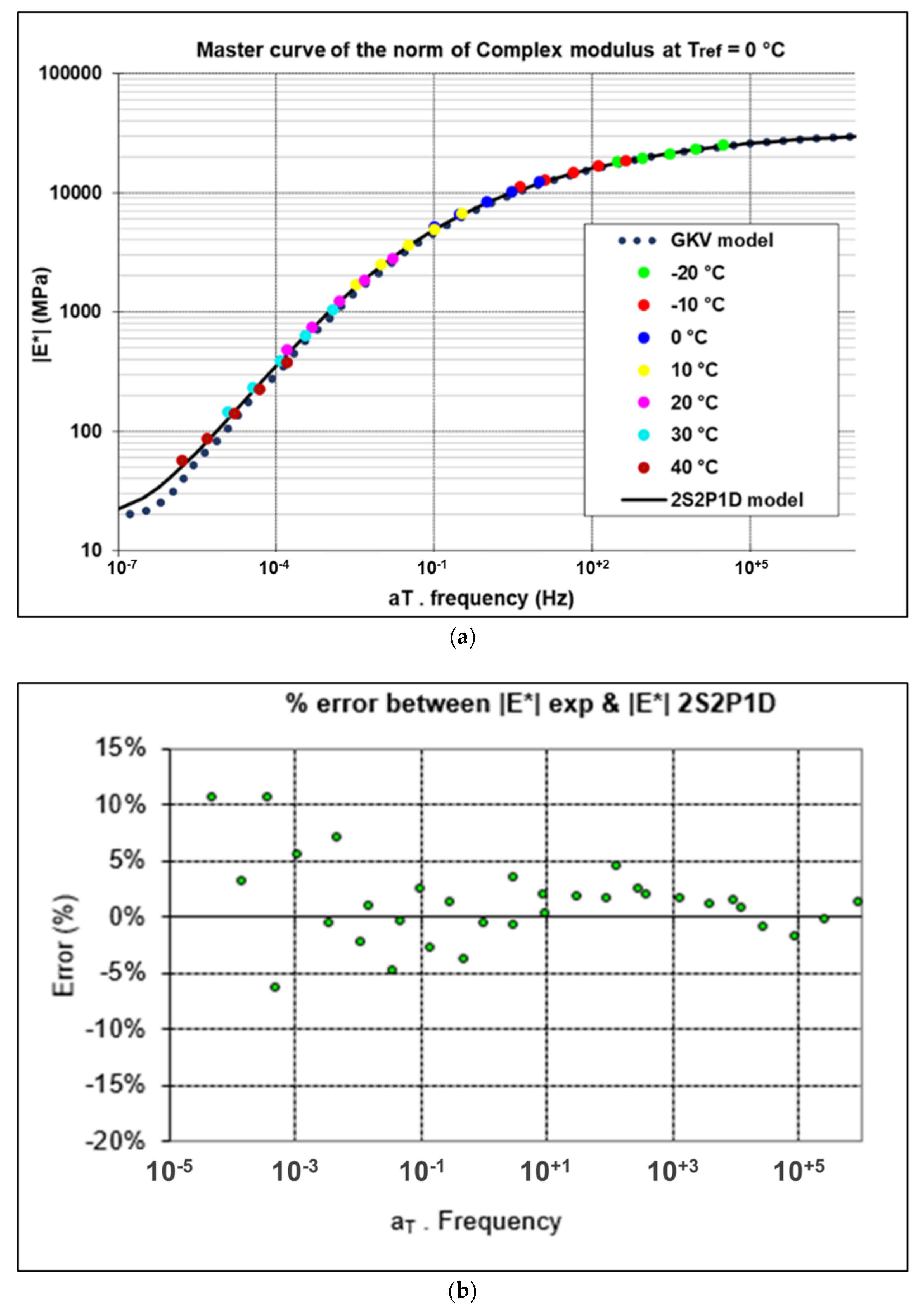
3.1. Complex Modulus Results and 2S2P1D Calibration
- E1: the real part of the complex modulus (storage modulus) (MPa).
- E2: the imaginary part of the complex modulus (loss modulus) (MPa).
- D1: the real part of the complex compliance (1/MPa).
- D2: the imaginary part of complex compliance (1/MPa).
- i: the imaginary unit.
3.2. Direct Tensile and Direct Compression Creep Tests Results
3.3. Indirect Tensile Creep Test Results
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Di Benedetto, H.; Corté, J.-F. Matériaux routiers bitumineux: Constitution et propriétés thermomécaniques des mélanges. Hermès Sci. Publ. 2004, 2, 75–215. [Google Scholar]
- Huang, Y.H. Pavement Analysis and Design, 2nd ed.; Pearson: Upper Saddle River, NJ, USA, 1993; Appendix A; pp. 655–670. [Google Scholar]
- Puppala, A.J. Estimating Stiffness of Subgrade and Unbound Materials for Pavement Design; Transportation Research Board: Washington, DC, USA, 2008; Volume 382. [Google Scholar]
- Olard, F. Comportement Thermomécanique des Enrobés Bitumineux à Basses Températures. Relat. Entre Les Propriétés Du Liant Et De L’enrobé. Ph.D. Thesis, The Institut National des Sciences Appliquées de Lyon, Lyon, France, 2003. [Google Scholar]
- Olidis, C.; Hein, D. Guide for the Mechanistic-Empirical Design of New and Rehabilitated Pavement Structures Materials Characterization: Is Your Agency Ready. In Proceedings of the 2004 Annual Conference of the Transportation Association of Canada, Québec City, QC, Canada, 19–22 September 2004. [Google Scholar]
- Al-Qadi, I.L.; Loulizi, A.; Aref, S.; Masson, J.F.; McGhee, K.M. Modification of bending beam rheometer specimen for low-temperature evaluation of bituminous crack sealants. Transp. Res. Rec. 2005, 1933, 96–106. [Google Scholar] [CrossRef]
- Anderson, D.A.; Kennedy, T.W. Development of SHRP binder specification. J. Assoc. Asph. Paving Technol. 1993, 62, 481–501. [Google Scholar]
- Bahia, H.U.; Anderson, D.A. The development of the bending beam rheometer; basics and critical evaluation of the rheometer. Phys. Prop. Asph. Cem. Binders. Astm Int. 1995, 28–50. [Google Scholar] [CrossRef]
- Bahia, H.U.; Anderson, D.A.; Christensen, D.W. The bending beam rheometer; a simple device for measuring low-temperature rheology of asphalt binders (with discussion). J. Assoc. Asph. Paving Technol. 1992, 61, 117–153. [Google Scholar]
- T322-07–Standard Method of Test for Determining the Creep Compliance and Strength of Hot-Mix Asphalt (HMA) Using the Indirect Tensile Test Device; American Association of State Highway and Transportation Officials: Washington, DC, USA, 2007.
- Christensen, D.W.; Bonaquist, R.F. Evaluation of Indirect Tensile Test (IDT) Procedures for Low-Temperature Performance of Hot Mix Asphalt; Transportation Research Board: Washington, DC, USA, 2004; Volume 530. [Google Scholar]
- Richardson, D.N.; Lusher, S.M. Determination of Creep Compliance and Tensile Strength of Hot-Mix Asphalt for Wearing Courses in Missouri. Missouri. Dept. Transp. 2008, RI05-052, 75. [Google Scholar]
- Olard, F.; Di Benedetto, H.; Eckmann, B.; Triquigneaux, J.P. Linear viscoelastic properties of bituminous binders and mixtures at low and intermediate temperatures. Road Mater. Pavement Des. 2003, 4, 77–107. [Google Scholar] [CrossRef]
- Olard, F.; Di Benedetto, H.; Eckmann, B. Rhéologie des bitumes: Prédiction des résultats des tests de fluage BBR à partir des résultats de module complexe. Bull. Des. Lab. Des. Ponts Et Chaussées 2004, 252–253, 3–15. [Google Scholar]
- Olard, F.; Di Benedetto, H.; Dony, A.; Vaniscote, J.C. Properties of bituminous mixtures at low temperatures and relations with binder characteristics. Mater. Struct. 2005, 38, 121–126. [Google Scholar] [CrossRef]
- Marasteanu, M.O. Inter-Conversions of the Linear Viscoelastic Functions Used for the Rheological Characterization of Asphalt Binders. Ph.D. Thesis, Pennsylvania State University, Philadelphia, PA, USA, 1999. [Google Scholar]
- Marques, S.P.C.; Creus, G.J. Computational Viscoelasticity; Springer Science & Business Media: Berlin, Germany, 2012; pp. 11–28. [Google Scholar]
- Olard, F.; Di Benedetto, H. General “2S2P1D” model and relation between the linear viscoelastic behaviours of bituminous binders and mixes. Road Mater. Pavement Des. 2003, 4, 185–224. [Google Scholar]
- Tiouajni, S.; Di Benedetto, H.; Sauzéat, C.; Pouget, S. Approximation of linear viscoelastic model in the 3 dimensional case with mechanical analogues of finite size: Application to bituminous materials. Road Mater. Pavement Des. 2011, 12, 897–930. [Google Scholar] [CrossRef]
- Carret, J.C.; Falchetto, A.C.; Marasteanu, M.O.; Di Benedetto, H.; Wistuba, M.P.; Sauzeat, C. Comparison of rheological parameters of asphalt binders obtained from bending beam rheometer and dynamic shear rheometer at low temperatures. Road Mater. Pavement Des. 2015, 16, 211–227. [Google Scholar] [CrossRef]
- Di Benedetto, H.; Mondher, N.; Sauzéat, C.; Olard, F. Three-dimensional thermo-viscoplastic behaviour of bituminous materials: The DBN model. Road Mater. Pavement Des. 2007, 8, 285–315. [Google Scholar]
- Di Benedetto, H.; Olard, F.; Sauzéat, C.; Delaporte, B. Linear viscoelastic behaviour of bituminous materials: From binders to mixes. Road Mater. Pavement Des. 2004, 5, 163–202. [Google Scholar] [CrossRef]
- Ferry, J.D. Viscoelastic Properties of Polymers; John Wiley & Sons: Somerset, NJ, USA, 1980. [Google Scholar]
- Perraton, D.; Di Benedetto, H.; Sauzéat, C.; Hofko, B.; Graziani, A.; Nguyen, Q.T.; Grenfell, J. 3Dim experimental investigation of linear viscoelastic properties of bituminous mixtures. Mater. Struct. 2016, 49, 4813–4829. [Google Scholar] [CrossRef] [Green Version]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Temperature (°C) | Force Max (N) | Stress Max (MPA) |
|---|---|---|
| −20 | 1800 | 0.41 |
| −10 | 1500 | 0.34 |
| 0 | 1200 | 0.27 |
| 10 | 500 | 0.11 |
| Modulus Loss | ||||
|---|---|---|---|---|
| −20 °C | −10 °C | 0 °C | 10 °C | |
| 10 Hz | 0.32% | 0.02% | −0.13% | 1.50% |
| 3 Hz | 0.19% | 0.51% | 0.51% | 2.41% |
| 1 Hz | 0.39% | 0.53% | 0.17% | 2.11% |
| 0.3 Hz | 0.05% | 0.00% | −1.37% | 2.17% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Daoudi, A.; Perraton, D.; Dony, A.; Carter, A. From Complex Modulus E* to Creep Compliance D(t): Experimental and Modeling Study. Materials 2020, 13, 1945. https://doi.org/10.3390/ma13081945
Daoudi A, Perraton D, Dony A, Carter A. From Complex Modulus E* to Creep Compliance D(t): Experimental and Modeling Study. Materials. 2020; 13(8):1945. https://doi.org/10.3390/ma13081945
Chicago/Turabian StyleDaoudi, Abdeldjalil, Daniel Perraton, Anne Dony, and Alan Carter. 2020. "From Complex Modulus E* to Creep Compliance D(t): Experimental and Modeling Study" Materials 13, no. 8: 1945. https://doi.org/10.3390/ma13081945
APA StyleDaoudi, A., Perraton, D., Dony, A., & Carter, A. (2020). From Complex Modulus E* to Creep Compliance D(t): Experimental and Modeling Study. Materials, 13(8), 1945. https://doi.org/10.3390/ma13081945