
Inverse Transformation in Eddy Current Tomography with Continuous Optimization of Reference Defect Parameters



Abstract
:1. Introduction
2. Materials and Methods
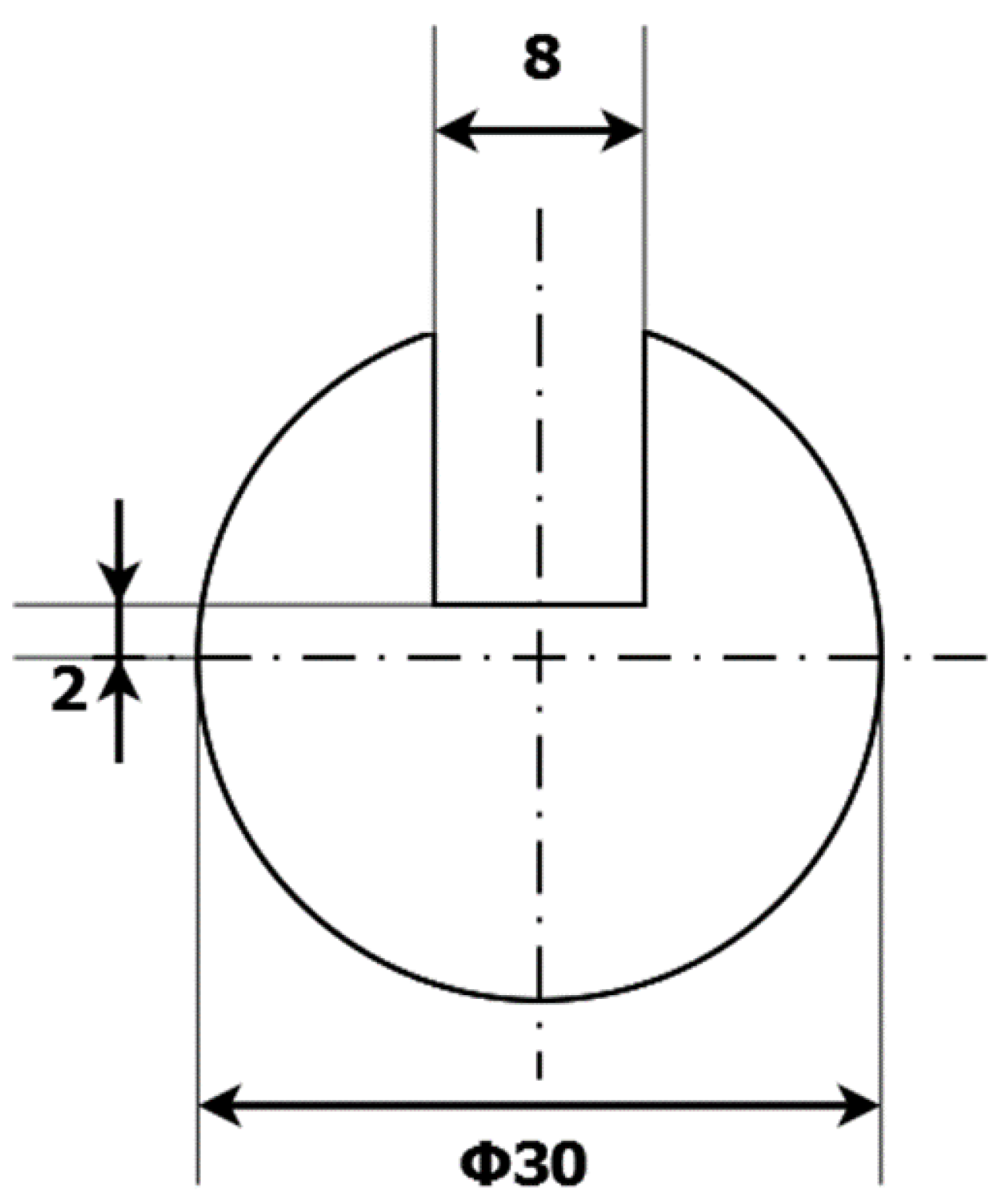
2.1. Sample Preparation
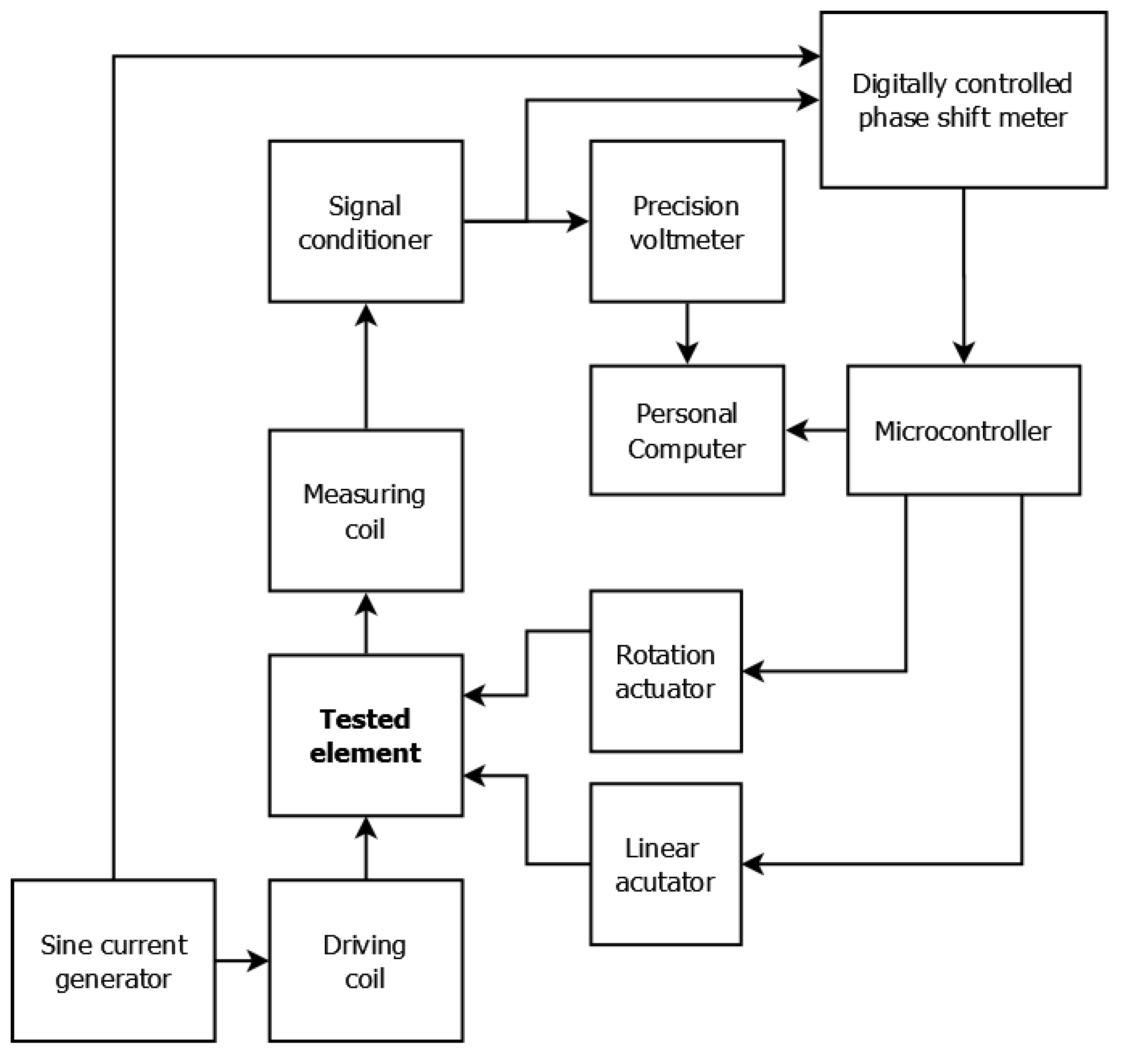
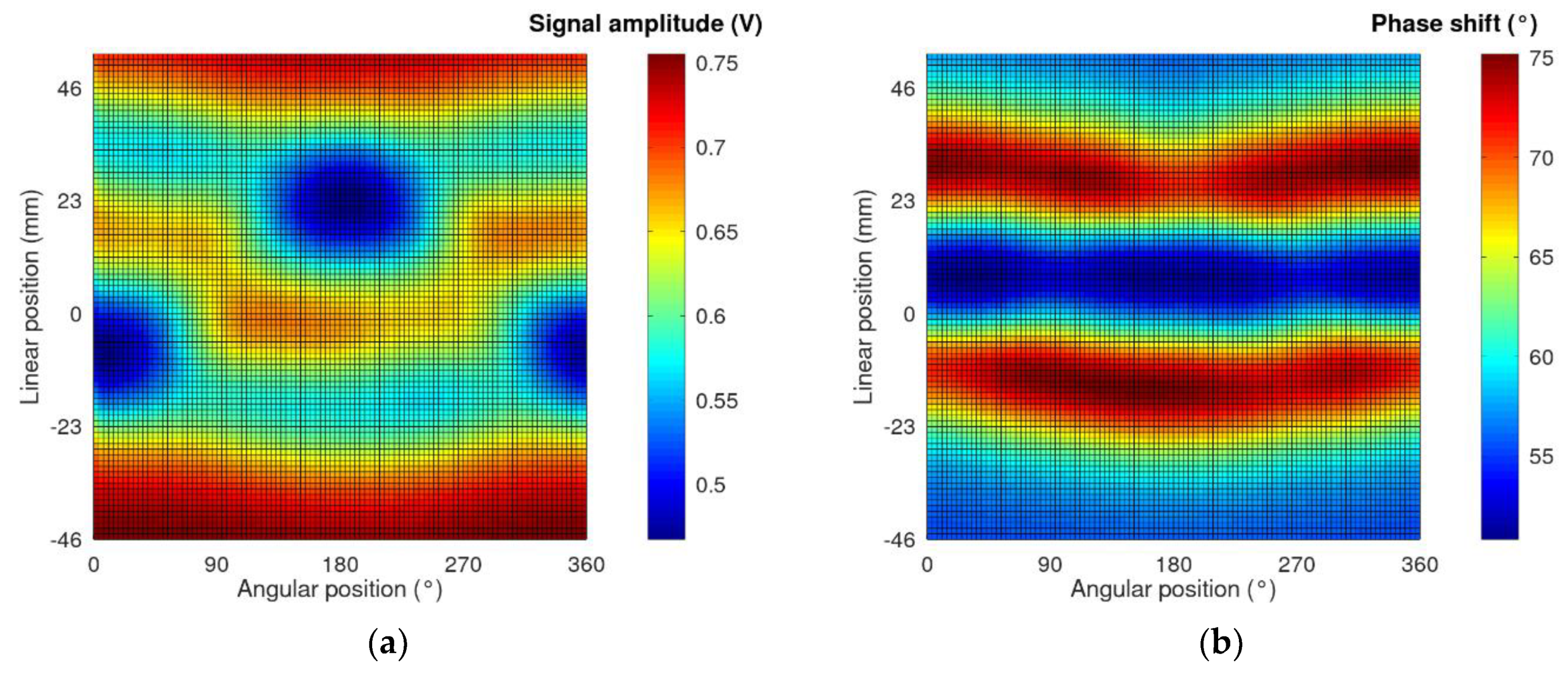
2.2. Measurement Method
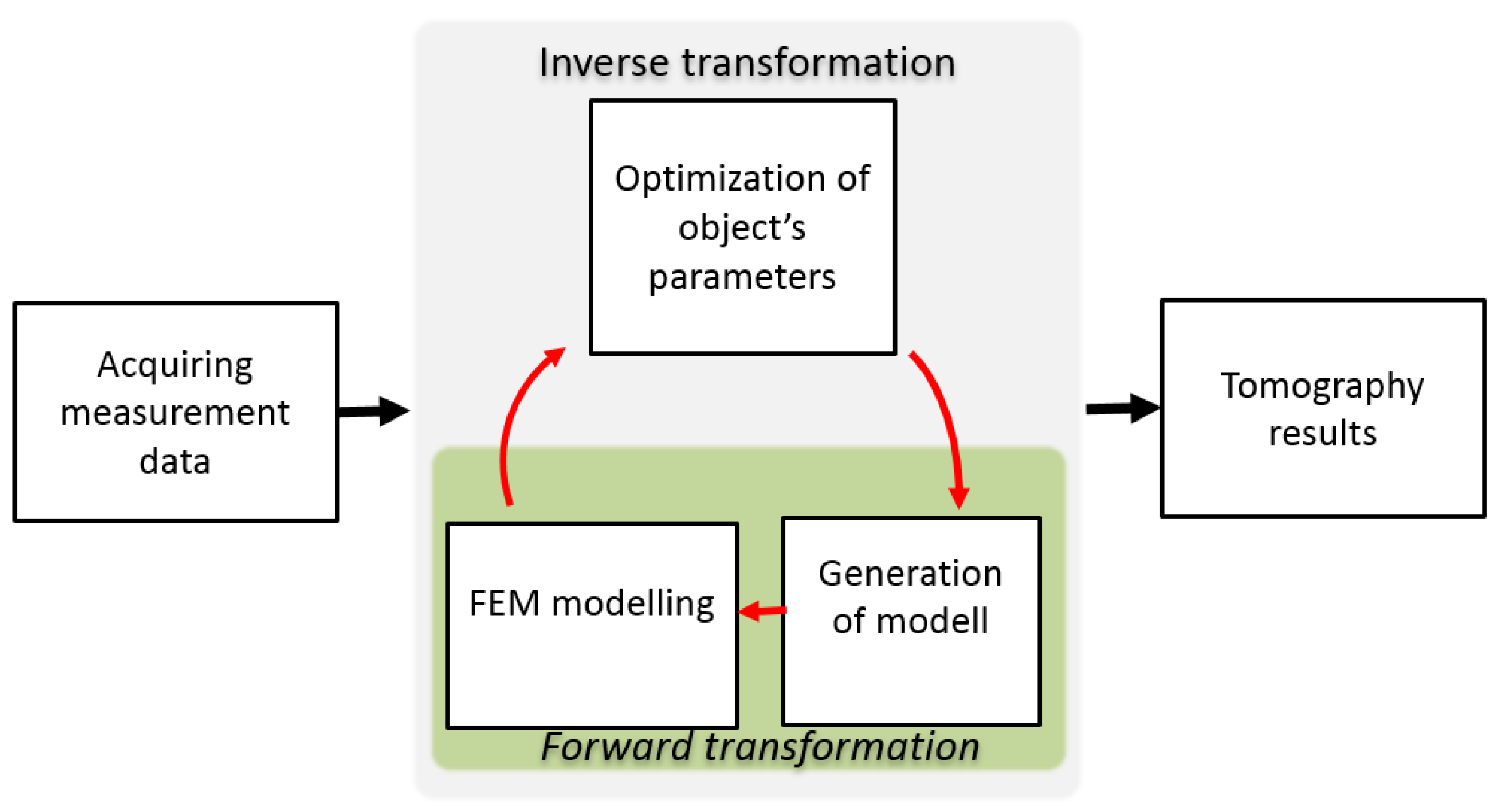
2.3. Method of Inverse Tomography Transformation
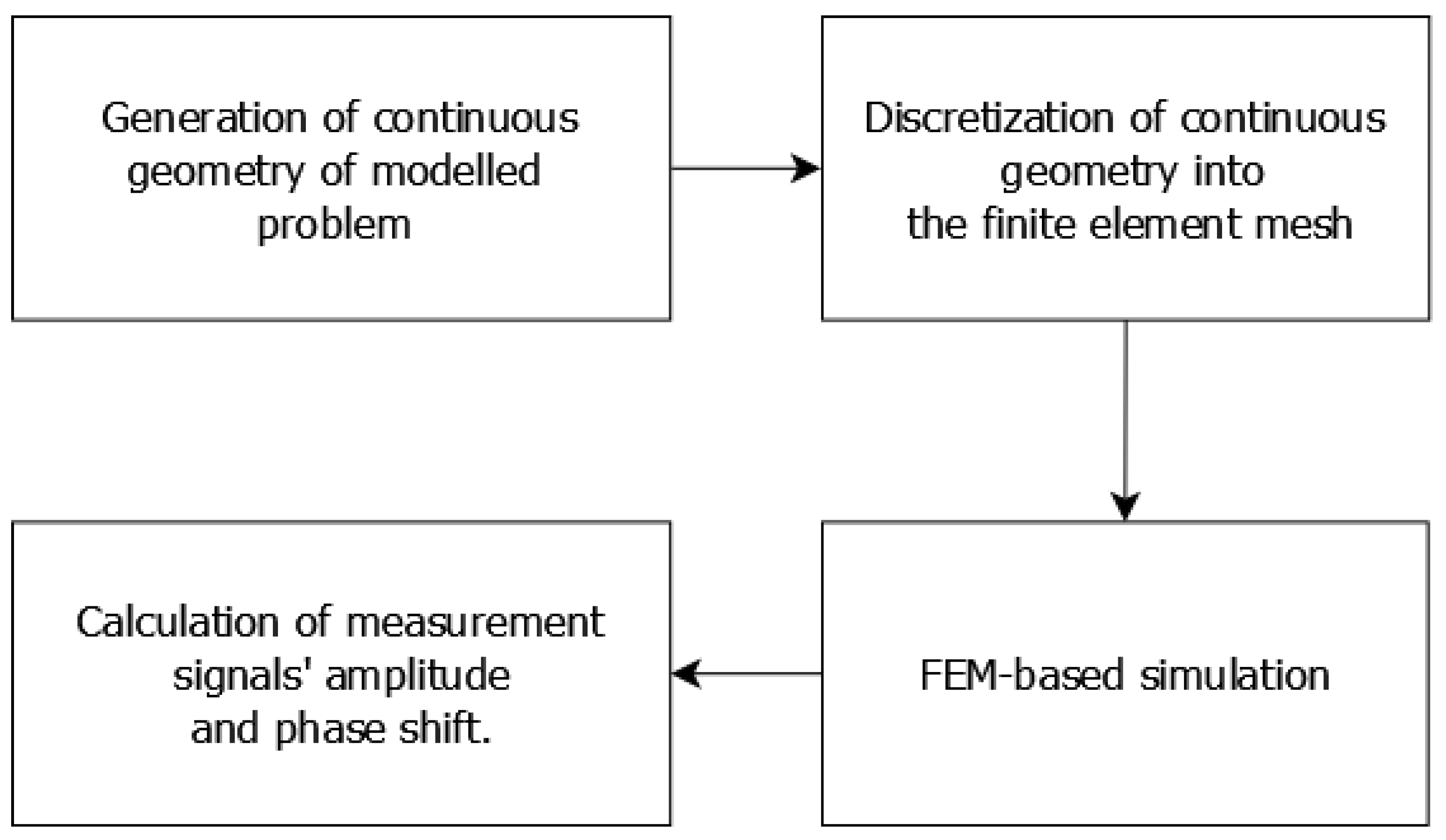
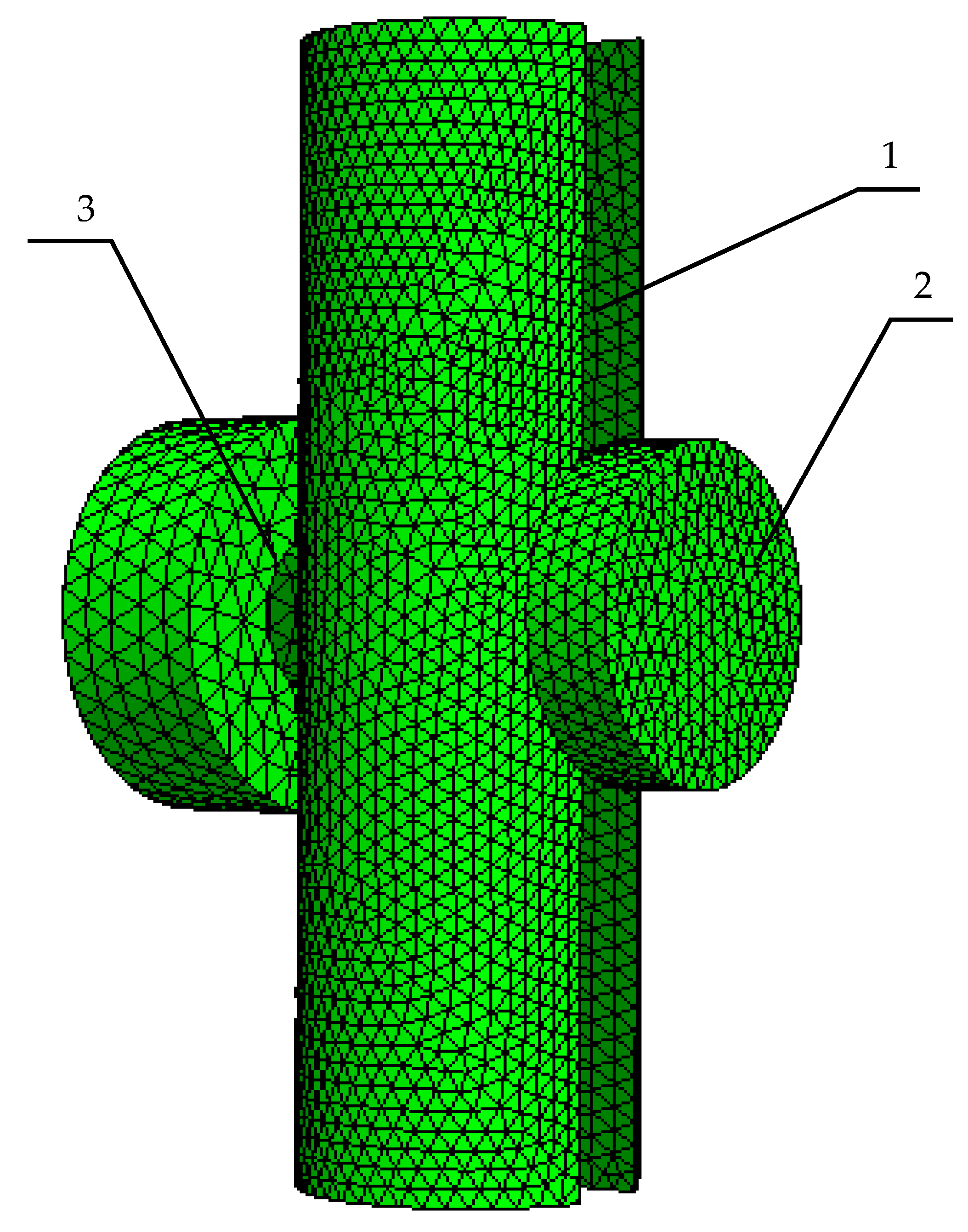
2.4. Method of Forward Tomography Transformation
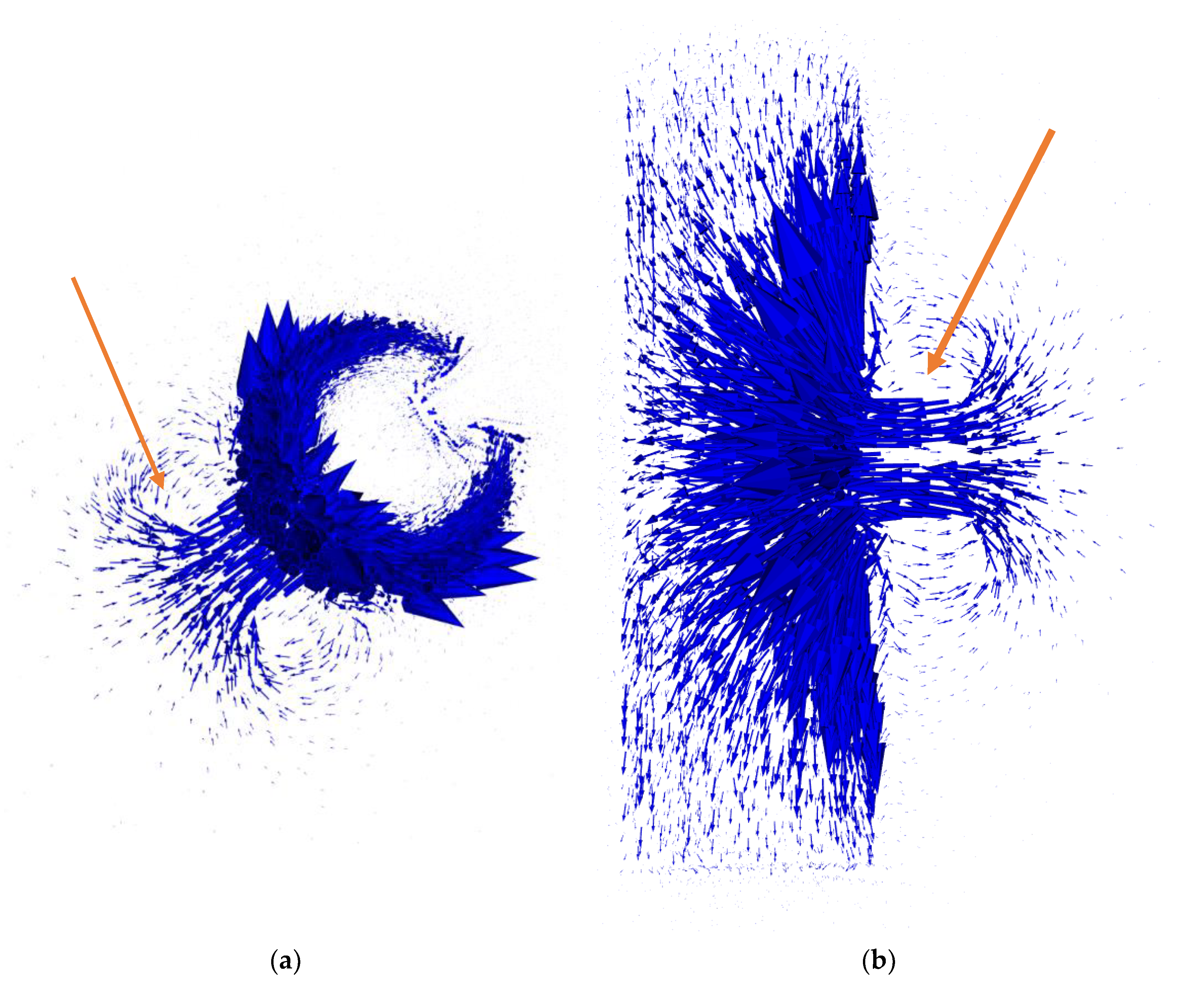
- Bre—real part of the magnetic flux density numerically integrated into the volume of the measurement coil;
- Bim—imaginary part of the magnetic flux density numerically integrated into the volume of the measurement coil.
3. Results
3.1. Inverse Tomography Transformation Results
3.2. Repeatability Analysis of the Results from Inverse Tomography Transformation
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Premel, D.; Mohammad-Djafari, A. Eddy current tomography in cylindrical geometry. IEEE Trans. Magn. 1995, 31, 2000–2003. [Google Scholar] [CrossRef]
- Wendler, F.; Munjal, R.; Waqas, M.; Laue, R.; Härtel, S.; Awiszus, B.; Kanoun, O. Eddy Current Sensor System for Tilting Independent In-Process Measurement of Magnetic Anisotropy. Sensors 2021, 21, 2652. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Chatzidrosos, G.; Hu, Y.; Zheng, H.; Wickenbrock, A.; Jerschow, A.; Budker, D. Battery Characterization via Eddy-Current Imaging with Nitrogen-Vacancy Centers in Diamond. Appl. Sci. 2021, 11, 3069. [Google Scholar] [CrossRef]
- Borovik, S.; Sekisov, Y. Single-Coil Eddy Current Sensors and Their Application for Monitoring the Dangerous States of Gas-Turbine Engines. Sensors 2020, 20, 2107. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Yu, Y. Traditional eddy current–pulsed eddy current fusion diagnostic technique for multiple micro-cracks in metals. Sensors 2018, 18, 2909. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Soleimani, M.; Tamburrino, A. Shape reconstruction in magnetic induction tomography using multifrequency data. Int. J. Inf. Syst. Sci. 2006, 2, 343–353. [Google Scholar]
- Li, F.; Spagnul, S.; Odedo, V.; Soleimani, M. Monitoring Surface Defects Deformations and Displacements in Hot Steel Using Magnetic Induction Tomography. Sensors 2019, 19, 3005. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dingley, G.; Soleimani, M. Multi-Frequency Magnetic Induction Tomography System and Algorithm for Imaging Metallic Objects. Sensors 2021, 21, 3671. [Google Scholar] [CrossRef] [PubMed]
- Muttakin, I.; Soleimani, M. Magnetic Induction Tomography Spectroscopy for Structural and Functional Characterization in Metallic Materials. Materials 2020, 13, 2639. [Google Scholar] [CrossRef] [PubMed]
- Salach, J.; Szewczyk, R.; Nowicki, M. Eddy current tomography for testing of ferromagnetic and non-magnetic materials. Meas. Sci. Technol. 2014, 25, 1–4. [Google Scholar] [CrossRef]
- Nowak, P.; Nowicki, M.; Juś, A.; Szewczyk, R. Utilization of eddy current tomography in automotive industry. Acta Phys. Pol. A 2017, 131, 1168–1170. [Google Scholar] [CrossRef]
- Ma, L.; Soleimani, M. Magnetic Induction Spectroscopy for Permeability Imaging. Sci. Rep. 2018, 8, 7025. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ma, L.; Spangul, S.; Soleimani, M. Metal Solidification Imaging Process by Magnetic Induction Tomography. Sci. Rep. 2017, 7, 14502. [Google Scholar] [CrossRef]
- Pham, M.H.; Hua, Y.; Gray, N.B. Imaging the solidification of molten metal by eddy currents: II. Inverse Probl. 2000, 16, 483. [Google Scholar] [CrossRef]
- Watson, S.; Williams, R.J.; Gough, W.; Griffiths, H. A magnetic induction tomography system for samples with conductivities below 10 S m−1. Meas. Sci. Technol. 2008, 19, 045501. [Google Scholar] [CrossRef]
- Marmugi, L.; Renzoni, F. Optical Magnetic Induction Tomography of the Heart. Sci. Rep. 2016, 6, 23962. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ito, K.; Jin, B. Inverse Problems: Tikhonov Theory and Algorithms, 1st ed.; World Scientific: Singapore, 2014; ISBN 978-981-4596-21-3. [Google Scholar]
- Ma, X.; Peyton, A.; Higson, S.; Lyons, A.; Dickinson, S. Hardware and software design for an electromagnetic induction tomography system for high contrast metal process applications. Meas. Sci. Technol. 2006, 17, 111–118. [Google Scholar] [CrossRef]
- Nowak, P.; Nowicki, M.; Gromada, K.; Szewczyk, R. Utilization of Electromagnetic Tomography for Ferrite Rings Testing. Acta Phys. Pol. A 2018, 133, 1045–1048. [Google Scholar] [CrossRef]
- Nowak, P. Magnetoelastic Effect Detection with the Usage of Eddy Current Tomography. Materials 2019, 12, 346. [Google Scholar] [CrossRef] [Green Version]
- Nowak, P.; Urbański, M.; Raback, P.; Roukolainen, J.; Kachiarz, M.; Szewczyk, R. Discrete Inverse Transformation for Eddy Current Tomography. Acta Phys. Pol. A 2018, 133, 701–703. [Google Scholar] [CrossRef]
- Nowak, P.; Szewczyk, R. Determination of Initial Parameters for Inverse Tomography Transformation in Eddy Current Tomography. In Automation 2018 Advances in Automation, Robotics and Measurement Techniques, 1st ed.; Szewczyk, R., Zieliński, C., Kaliczyńska, M., Eds.; Springer: Berlin, Germany, 2018; Volume 1, pp. 682–688. [Google Scholar]
- Luersen, M.; Le Riche, R.; Guyon, F. A constrained, globalized, and bounded Nelder–Mead method for engineering optimization. Struct. Multidiscip. Optim. 2004, 27, 43–54. [Google Scholar] [CrossRef]
- Yeniay, Ö. Penalty Function Methods for Constrained Optimization with Genetic Algorithms. Math. Comput. Appl. 2005, 10, 45–56. [Google Scholar] [CrossRef] [Green Version]
- Nowicki, M.; Szewczyk, R. Modelling of the Magnetovision Image with the Finite Element Method. In Proceedings of the 20th International Conference on Applied Physics of Condensed Matter (APCOM2014), Štrbské Pleso, Slovakia, 25–27 June 2014; pp. 131–134. [Google Scholar]
- Råback, P.; Malinen, M.; Ruokolainen, J.; Pursula, A.; Zwinger, T. Elmer Models Manual; CSC–IT Center for Science: Helsinki, Finland, 2013. [Google Scholar]
- Praczukowska, A.; Nowicki, M.; Salach, J.; Szewczyk, R. Modelling the Magnetic Field Distribution In The Magnetic Susceptibility Balance Design. J. Electr. Eng. 2015, 66, 74–77. [Google Scholar]
- Прачукoвска, A., П; Hoвицки, М.С.; Kopoбийчyk, И.B.; Шевчиk, P.Ю.; Caлax, Я.Л. Modeling and Validation of Magnetic Field Distribution of Permanent Magnets. EEJET 2015, 6, 4–11. [Google Scholar] [CrossRef] [Green Version]
- Nowak, P. Validation of finite element method solver for utilization in eddy current tomography. In Advanced Mechatronics Solutions; Advances in Intelligent Systems and Computing; Springer: Cham, Switzerland, 2016; Volume 393, pp. 173–179. [Google Scholar]
- Wei, B.; Şimşek, E.; Yu, C.; Liu, Q.H. Three-dimensional electromagnetic nonlinear inversion in layered media by a hybrid diagonal tensor approximation: Stabilized biconjugate gradient fast Fourier transform method. Wave Random Complex 2007, 17, 129. [Google Scholar] [CrossRef]
- Nowak, P.; Szewczyk, R. Error Analysis of the Finite Element Method Calculations Depending on the Operating Range. In Recent Advances in Systems, Control and Information Technology. SCIT 2016; Szewczyk, R., Kaliczyńska, M., Eds.; Advances in Intelligent Systems and Computing; Springer: Cham, Switzerland, 2017; Volume 543, pp. 75–81. [Google Scholar] [CrossRef]
- Nowak, P.; Szewczyk, R. Midpoint detection and mesh optimisation for forward eddy current tomography transformation. In Proceedings of the 21st International Conference on Applied Physics of Condensed Matter (APCOM 2015), Štrbské Pleso, Slovakia, 24–26 June 2015; pp. 198–201. [Google Scholar]
- Nowak, P.; Szewczyk, R.; Ugodziński, R.; Bazydło, P. Optimization of interpolation for improved numeric calculation of forward eddy current tomography transformation. In Proceedings of the International Conference Automation 2017, Warsaw, Poland, 15–17 March 2017; pp. 481–487. [Google Scholar]
- Ismail, M. Bessel Functions and the Infinite Divisibility of the Student t-Distribution. Ann. Appl. Probab. 1977, 5, 582. [Google Scholar] [CrossRef]
- Kennedy, J. Particle swarm optimization. In Encyclopedia of Machine Learning; Springer: Boston, MA, USA, 2010; pp. 760–766. [Google Scholar]
- Castillo, O.; Valdez, F.; Soria, J.; Amador-Angulo, L.; Ochoa, P.; Peraza, C. Comparative Study in Fuzzy Controller Optimization Using Bee Colony, Differential Evolution, and Harmony Search Algorithms. Algorithms 2019, 12, 9. [Google Scholar] [CrossRef] [Green Version]
- Nowicki, M. Anhysteretic Magnetization Measurement Methods for Soft Magnetic Materials. Materials 2018, 11, 2021. [Google Scholar] [CrossRef] [Green Version]
- Nowicki, M.; Szewczyk, R.; Nowak, P. Experimental Verification of Isotropic and Anisotropic Anhysteretic Magnetization Models. Materials 2019, 12, 1549. [Google Scholar] [CrossRef] [PubMed] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
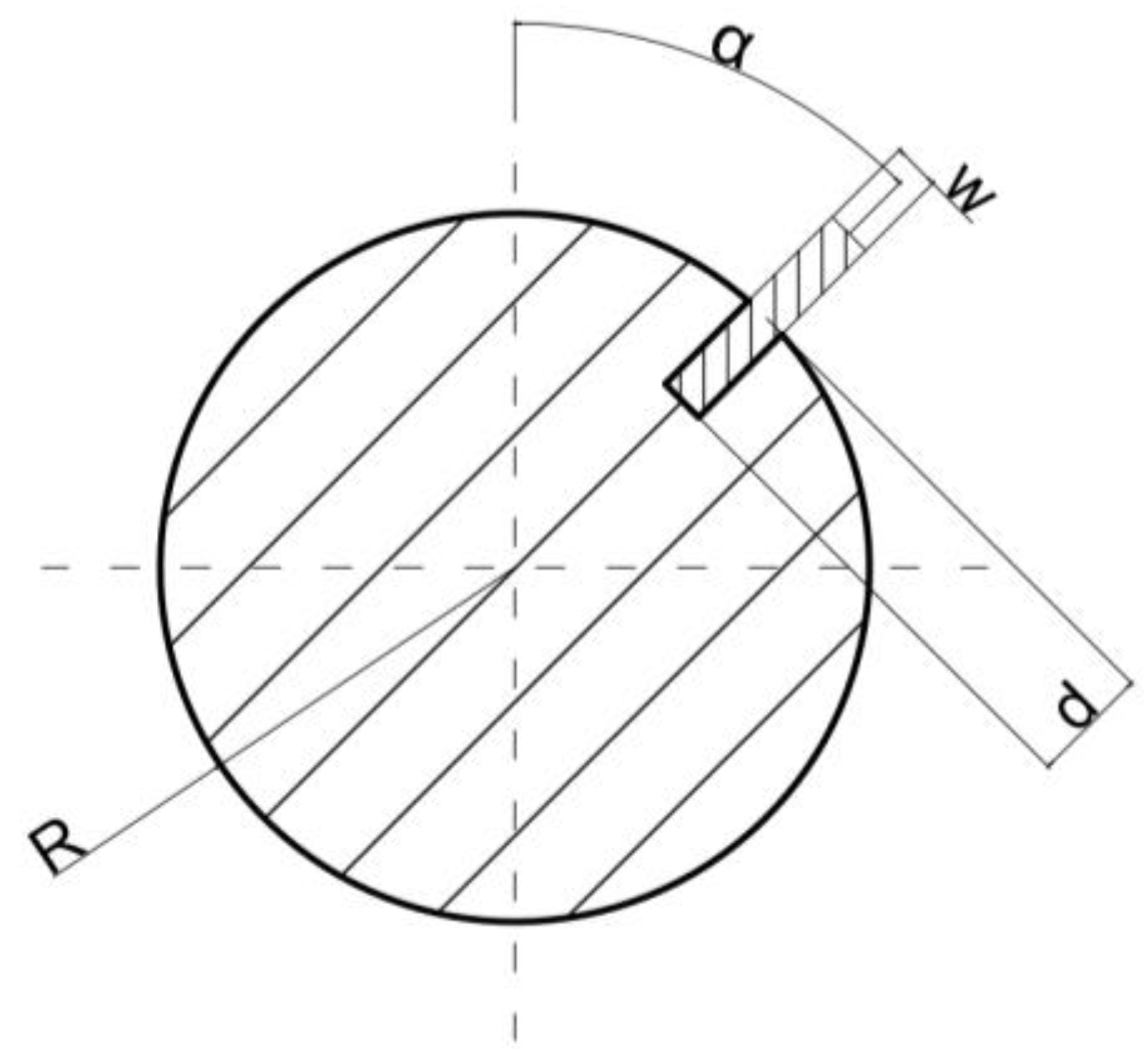
| Parameter Symbol | Parameter Function | Parameter Lower Limit | Parameter Higher Limit |
|---|---|---|---|
| R | Object radius | 5 mm | 16 mm |
| α | Initial angle of defect | 0° | 360° |
| d | Depth of the defect | 1 mm | R |
| w | Width of the defect | 1.5 mm | wmax |
| Real Parameters of the Sample | Results of Inverse Tomography Transformation | ||||||
|---|---|---|---|---|---|---|---|
| R (mm) | α (°) | d (mm) | w (mm) | R (mm) | α (°) | d (mm) | w (mm) |
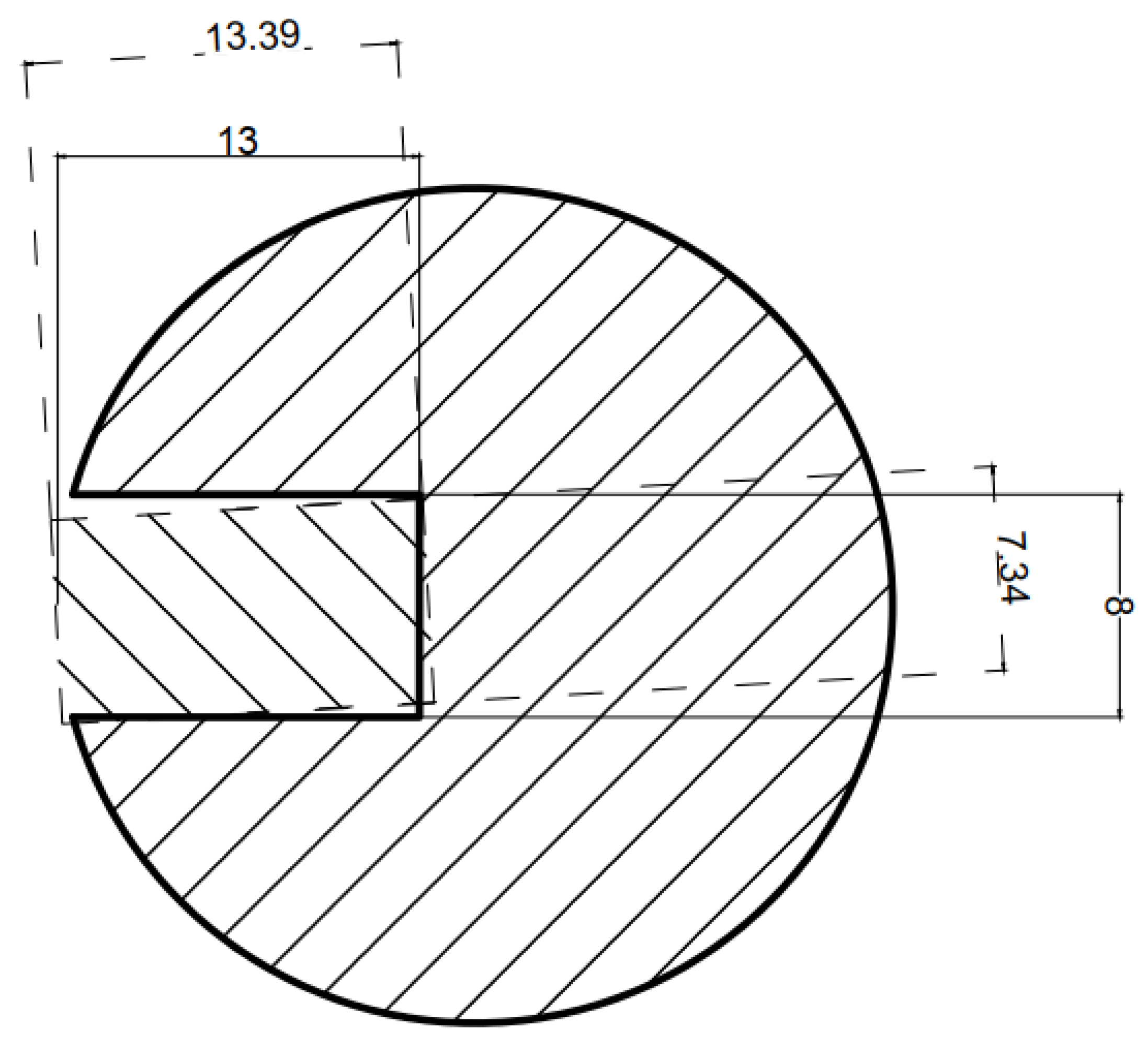
| 15.00 | 270 | 13.00 | 8.00 | 14.64 | 266.8 | 13.39 | 7.34 |
| 15.00 | 45 | 13.00 | 2.00 | 14.80 | 45.67 | 12.91 | 2.16 |
| 15.00 | 180 | 13.00 | 6.00 | 14.73 | 181.2 | 12.43 | 5.84 |
| 15.00 | 180 | 13.00 | 12.00 | 14.75 | 180 | 10.94 | 11.45 |
| No. | Description | R (mm) | α (°) | d (mm) | w (mm) |
|---|---|---|---|---|---|
| 1 | Real parameters of the sample | 15.00 | 270 | 13.00 | 8.00 |
| 2 | Result 1 | 14.64 | 266.8 | 13.39 | 7.34 |
| 3 | Result 2 | 14.81 | 268.3 | 13.21 | 7.84 |
| 4 | Result 3 | 14.62 | 268.3 | 13.45 | 7.56 |
| 5 | Mean value of the parameter | 14.72 | 267.80 | 13.35 | 7.58 |
| 6 | Standard deviation of the results | 0.09 | 0.87 | 0.12 | 0.25 |
| 7 | Expanded uncertainty | 0.45 | 3.72 | 0.54 | 1.08 |
| 8 | Difference between the real value of the parameter (Row 1) and the mean value of results obtained in three iterations of inverse tomography transformation (Row 5) | 0.28 | 2.20 | −0.35 | 0.42 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nowak, P.; Szewczyk, R.; Ostaszewska-Liżewska, A. Inverse Transformation in Eddy Current Tomography with Continuous Optimization of Reference Defect Parameters. Materials 2021, 14, 4778. https://doi.org/10.3390/ma14174778
Nowak P, Szewczyk R, Ostaszewska-Liżewska A. Inverse Transformation in Eddy Current Tomography with Continuous Optimization of Reference Defect Parameters. Materials. 2021; 14(17):4778. https://doi.org/10.3390/ma14174778
Chicago/Turabian StyleNowak, Paweł, Roman Szewczyk, and Anna Ostaszewska-Liżewska. 2021. "Inverse Transformation in Eddy Current Tomography with Continuous Optimization of Reference Defect Parameters" Materials 14, no. 17: 4778. https://doi.org/10.3390/ma14174778
APA StyleNowak, P., Szewczyk, R., & Ostaszewska-Liżewska, A. (2021). Inverse Transformation in Eddy Current Tomography with Continuous Optimization of Reference Defect Parameters. Materials, 14(17), 4778. https://doi.org/10.3390/ma14174778