
Application of Teager–Kaiser’s Instantaneous Frequency for Detection of Delamination in FRP Composite Materials


Abstract
:1. Introduction
2. Breathing Delamination Phenomena
3. Simplified Model of Vibration Signal
4. Detection of Frequency Fluctuation
4.1. Spectral Analysis
4.2. Hilbert Transform Demodulation Analysis
4.3. Signal Processing Using the Teager–Kaiser Energy Operator
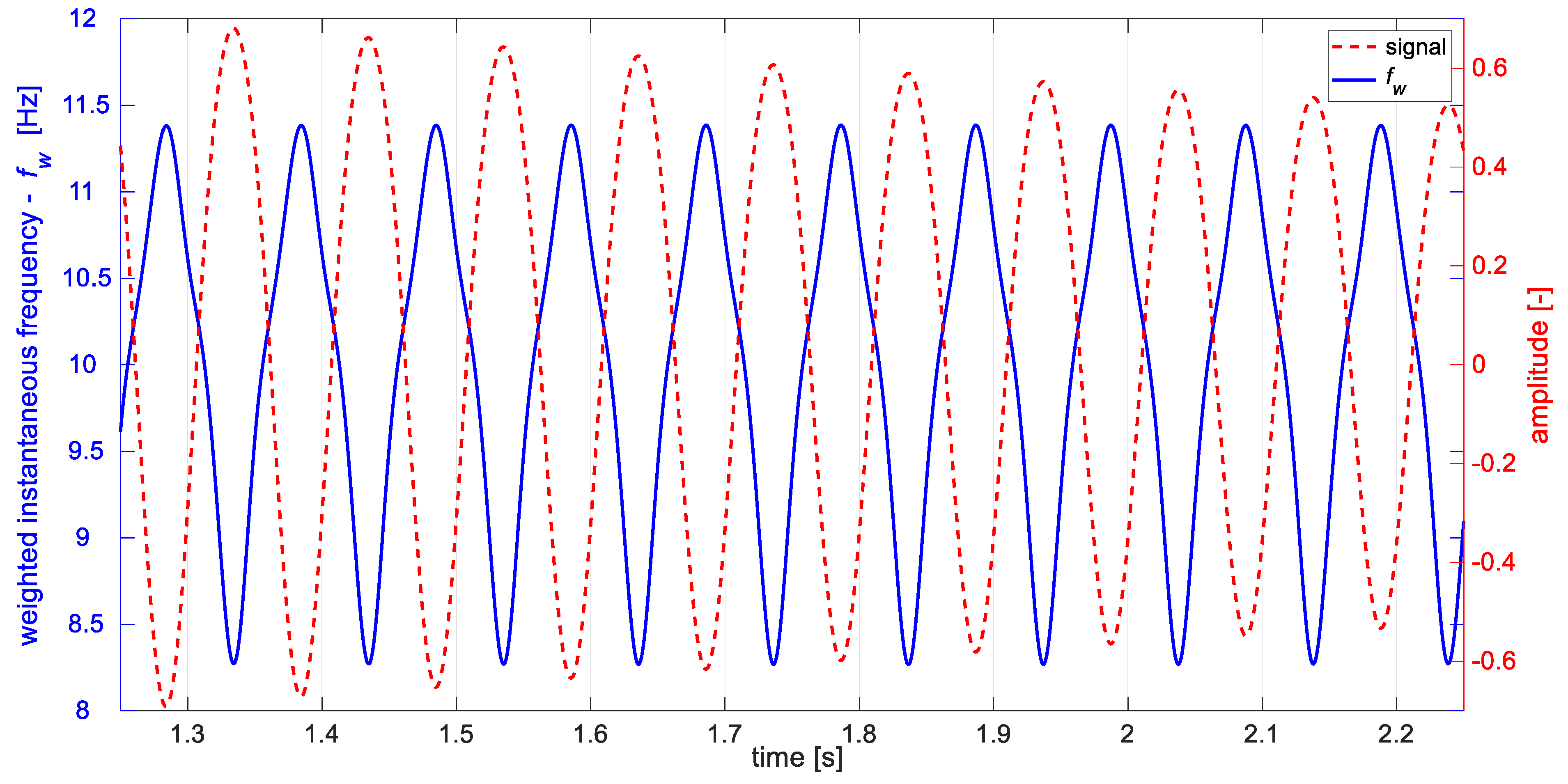
4.4. Estimation of Instantaneous Frequency of Decaying Signal
5. Estimation of Instantaneous Frequency of Signal from FEM Simulation
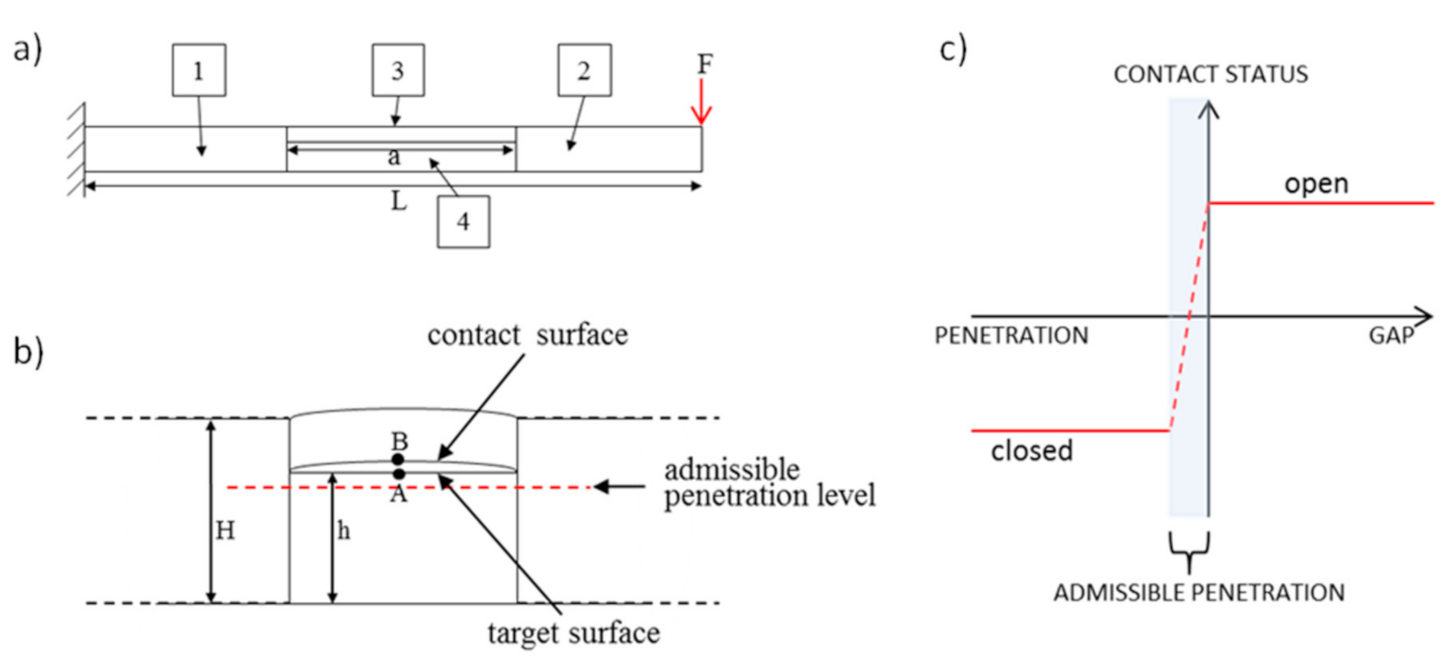
5.1. General Description of Modeling of the Delaminated Beam
5.2. General Description of the Contact Modeling
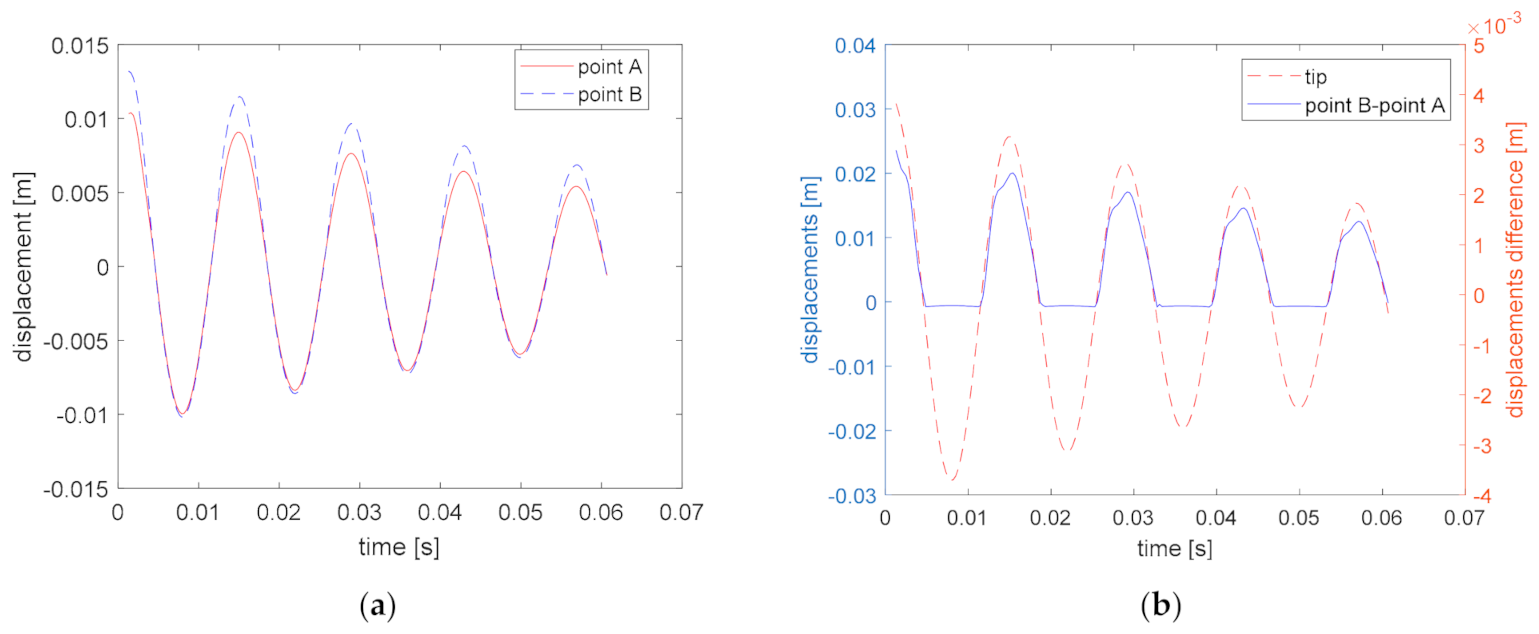
5.3. Case Study for 40% Delamintion
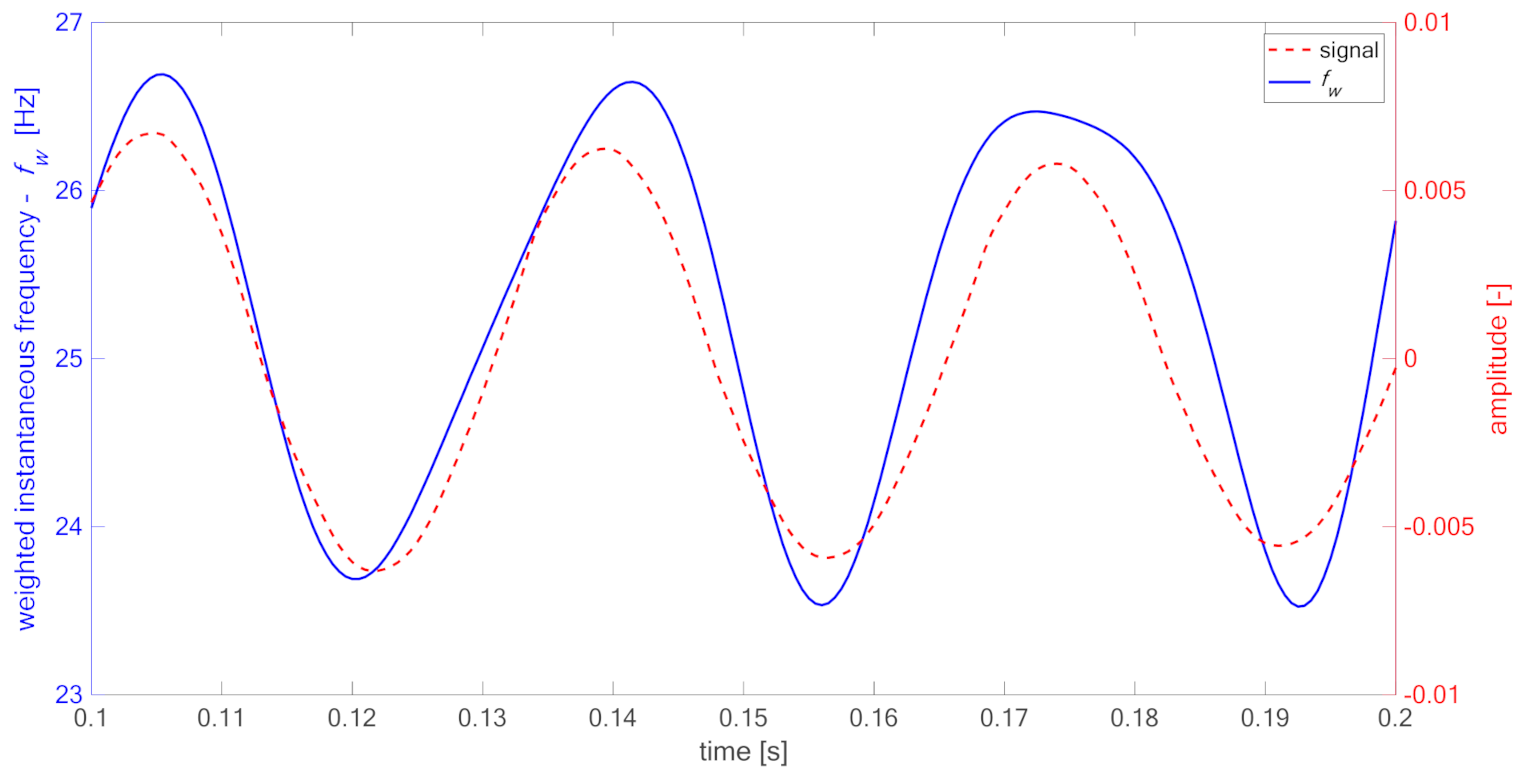
5.4. Analysis of FEM Signals
6. Experimental Validation of Teager–Kaiser Weighted Instantaneous Frequency
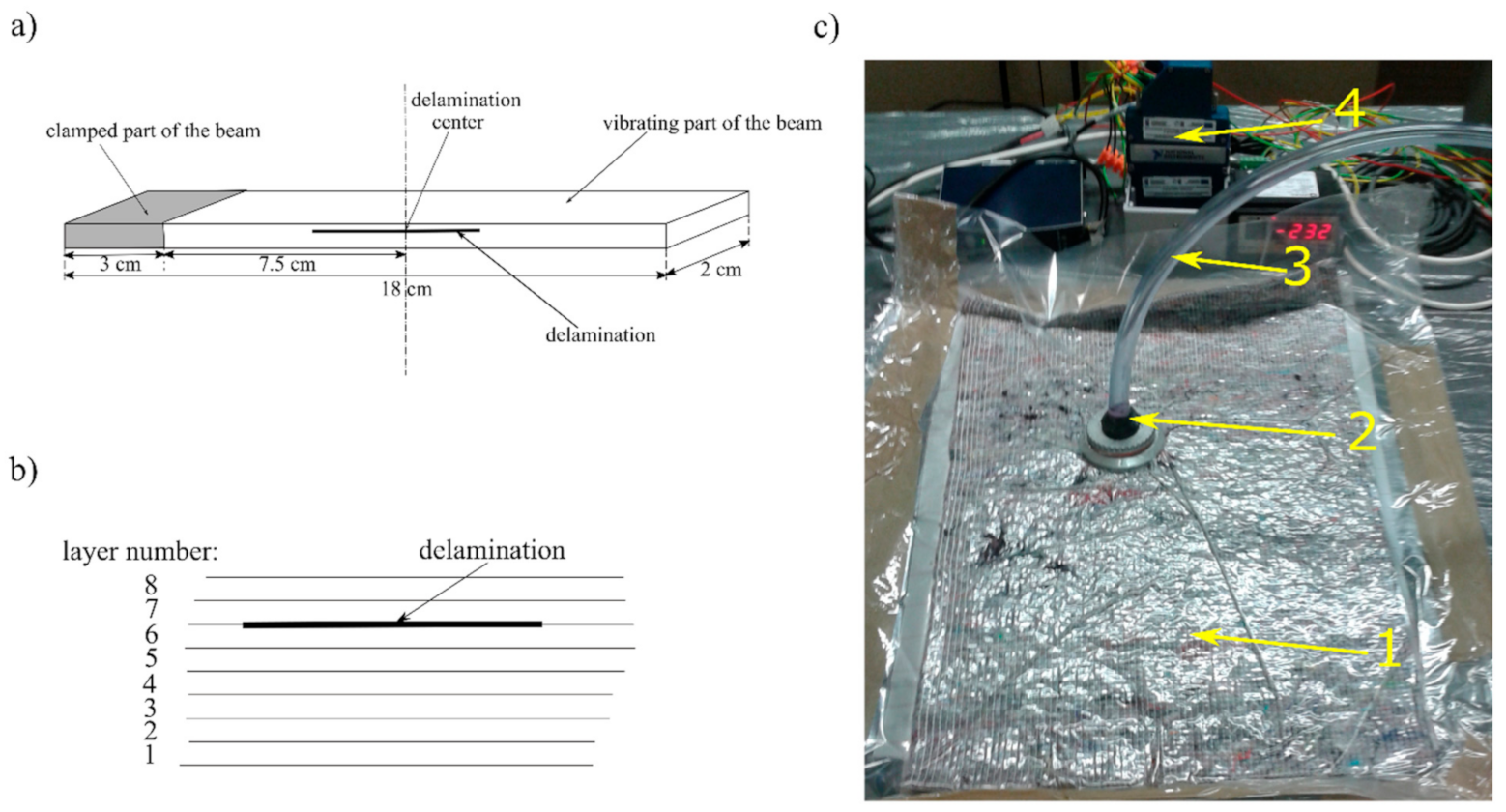
6.1. The Specimens
6.2. The Experimental Setup
6.3. The Measurements
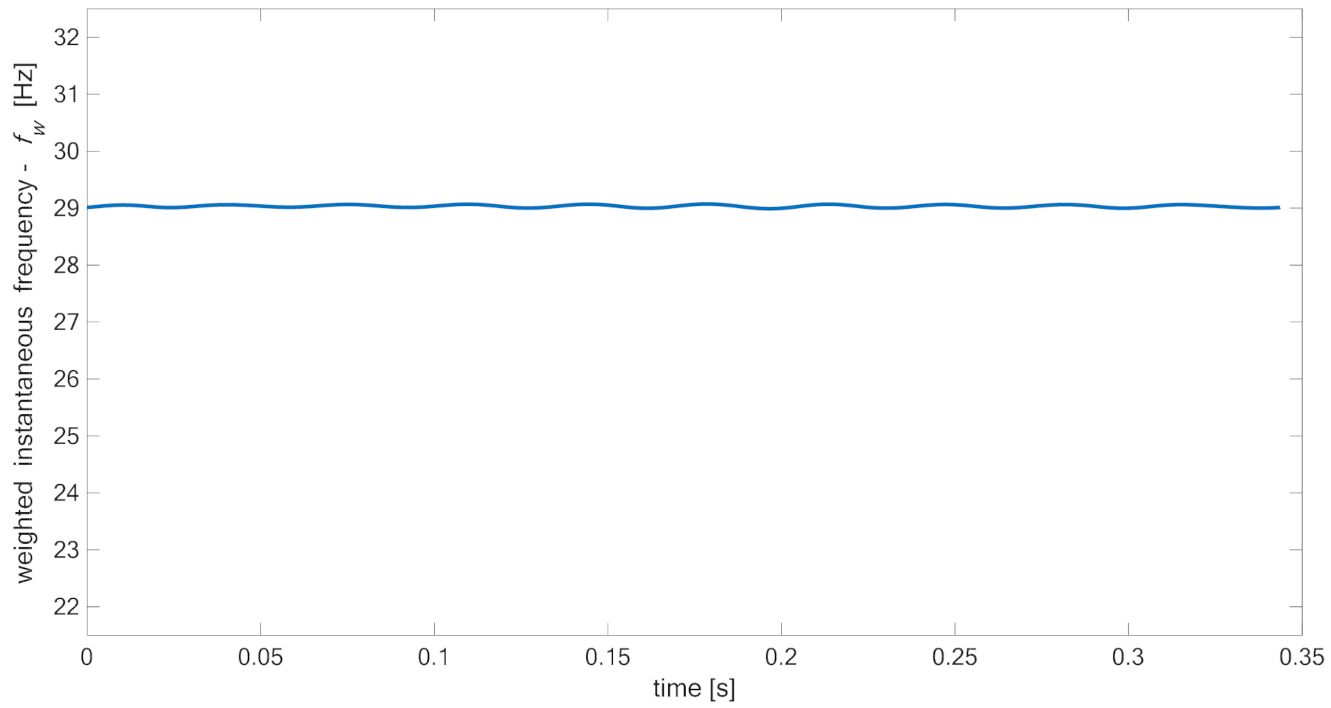
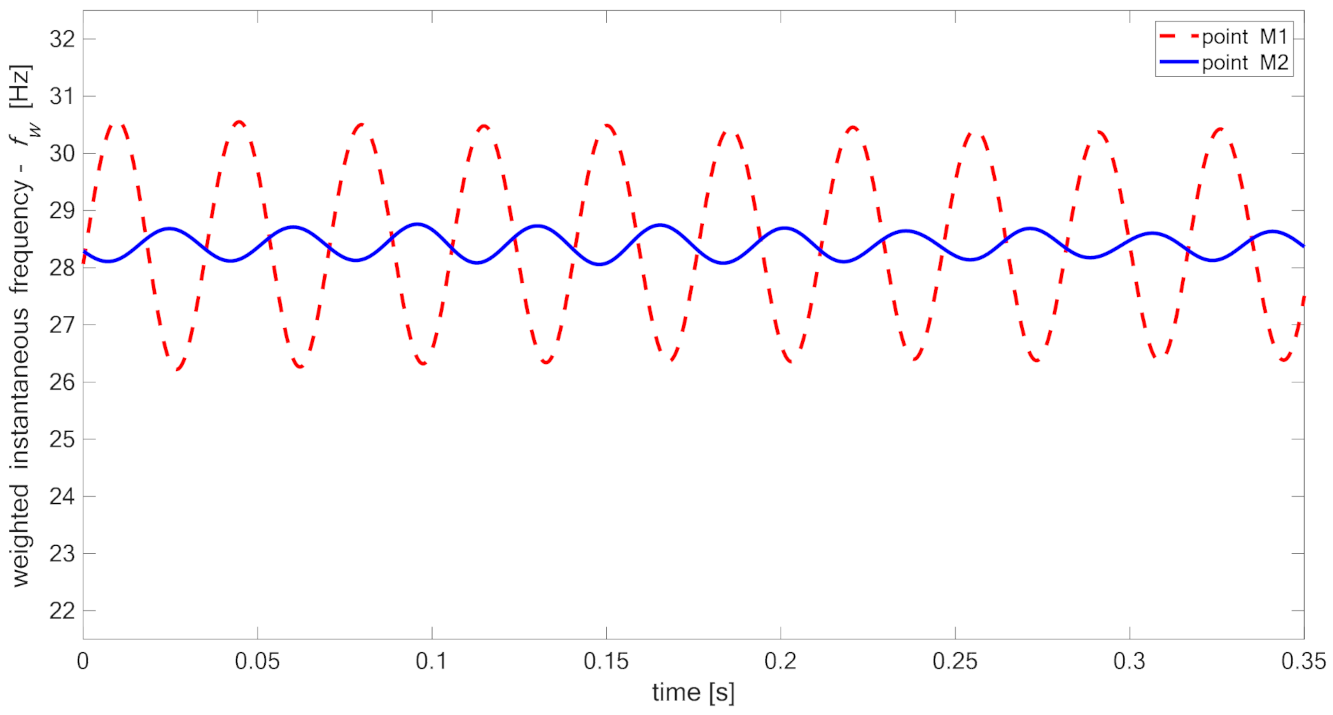
6.4. Experimental Results
7. Conclusions
- numerical models were created, reflecting breathing delamination phenomena in vibration signal;
- the conducted experimental tests confirmed half-period variation of instantaneous frequency resulting from breathing delamination;
- the weighted instantaneous frequency , a new approach for estimation of instantaneous frequency, has been developed and its effectiveness was tested;
- a failure indicator and a diagnostic method were proposed for detection of breathing delamination type failure.
- the use of the Teager–Kaiser operator for the construction of the new weighted instantaneous frequency parameter gives much better prospects for delamination detection than in the case of use of instantaneous frequency obtained using demodulation with the Hilbert transform;
- standard deviation of can be a good indicator of delamination existence;
- the method is efficient for the analysis of the real-world vibrational signals, when proper signal processing is applied.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Radkowski, S.; Jasiński, M. Use of condition monitoring in the proactive maintenance strategy. In Proceedings of the 8th World Congress on Engineering Asset Management, Hong Kong, China, 30 October–1 November 2013; Springer International Publishing: Cham, Switzerland, 2015; pp. 601–610. [Google Scholar]
- Randall, R.B.; Antoni, J. Rolling element bearing diagnostics—A tutorial. Mech. Syst. Signal Process. 2011, 25, 485–520. [Google Scholar] [CrossRef]
- Christensen, K. With the Robinson R44′s safety issues, the FAA has taken a more hands-off approach. Los Angeles Times 2018. Available online: https://www.latimes.com/la-me-ln-robinson-heli2-20181118-story.html (accessed on 18 September 2020).
- Liu, Z.; Yu, H.; He, C.; Wu, B. Delamination damage detection of laminated composite beams using air-coupled ultrasonic transducers. Sci. China Phys. Mech. Astron. 2013, 56, 1269–1279. [Google Scholar] [CrossRef]
- Zaiß, M.; Jank, M.H.; Netzelmann, U.; Waschkies, T.; Rabe, U.; Herrmann, H.G.; Thompson, M.; Lanza, G. Use of Thermography and Ultrasound for the Quality Control of SMC Lightweight Material Reinforced by Carbon Fiber Tapes. Procedia CIRP 2017, 33–38. [Google Scholar] [CrossRef]
- Dahmene, F.; Yaacoubi, S.; Mountassir, M. EL Acoustic Emission of Composites Structures: Story, Success, and Challenges. Phys. Procedia. 2015, 70, 599–603. [Google Scholar] [CrossRef] [Green Version]
- Derusova, D.A.; Vavilov, V.P.; Pawar, S.S. Evaluation of equivalent defect heat generation in carbon epoxy composite under powerful ultrasonic stimulation by using infrared thermography. In Proceedings of the International Scientific Conference on “Radiation-Thermal Effects and Processes in Inorganic Materials”, Tomsk, Russia, 3–8 November 2014. [Google Scholar] [CrossRef] [Green Version]
- Uhl, T.; Szwedo, M.; Bednarz, J. Application of active thermography for SHM of mechanical structures. In Proceedings of the 4th European Workshop on Structural Health Monitoring, Cracow, Poland, 2–4 July 2008; DEStech Publications, Inc.: Lancaster, PA, USA; pp. 149–156. [Google Scholar]
- Katunin, A.; Wachla, D. Analysis of defect detectability in polymeric composites using self-heating based vibrothermography. Compos. Struct. 2018, 201, 760–765. [Google Scholar] [CrossRef]
- Zhou, W.; Li, H.; Wu, Z. Damage Detection in the Composite Fuel Tank by Vibration Measurement Approach. In Proceedings of the 14th World Conference on Earthquake Engineering, Beijing, China, 12–17 October 2008. [Google Scholar]
- Kessler, S.S.; Spearing, S.M.; Atalla, M.J.; Cesnik, C.E.S.; Soutis, C. Damage detection in composite materials using frequency response methods. Compos. Part B Eng. 2002, 33, 87–95. [Google Scholar] [CrossRef]
- Garnier, C.; Pastor, M.-L.; Eymab, F.; Lorrain, B. The detection of aeronautical defects in situ on composite structures using Non Destructive Testing. Compos. Struct. 2011, 93, 1328–1336. [Google Scholar] [CrossRef] [Green Version]
- Towsyfyan, H.; Biguri, A.; Boardman, R.; Blumensath, T. Successes and challenges in non-destructive testing of aircraft composite structures. Chinese J. Aeronaut. 2019. [Google Scholar] [CrossRef]
- Das, S.; Saha, P. A review of some advanced sensors used for health diagnosis of civil engineering structures. Measurement 2018, 129, 68–90. [Google Scholar] [CrossRef]
- Tuloup, C.; Harizi, W.; Aboura, Z.; Meyer, Y.; Khellil, K.; Lachat, R. On the use of in-situ piezoelectric sensors for the manufacturing and structural health monitoring of polymer-matrix composites: A literature review. Compos. Struct. 2019, 215, 127–149. [Google Scholar] [CrossRef]
- Forke, R.; Scheibner, D.; Dötzel, W.; Mehner, J. Measurement unit for tunable low frequency vibration detection with MEMS force coupled oscillators. Sensors Actuators A. 2009, 156, 59–65. [Google Scholar] [CrossRef]
- Wang, S.; Wei, X.; Zhao, Y.; Jiang, Z.; Shen, Y. A MEMS resonant accelerometer for low-frequency vibration detection. Sensors Actuators A Phys. 2018, 283, 151–158. [Google Scholar] [CrossRef]
- Kudela, P.; Wandowski, T.; Malinowski, P.; Ostachowicz, W. Application of scanning laser Doppler vibrometry for delamination detection in composite structures. Opt. Lasers Eng. 2017, 99, 46–57. [Google Scholar] [CrossRef]
- Hossain, M.S.; Chao, O.Z.; Ismail, Z.; Noroozi, S.; Khoo, S.Y. Artificial neural networks for vibration based inverse parametric identifications: A review. Appl. Soft Comput. 2017, 52, 203–219. [Google Scholar] [CrossRef]
- Gomes, G.F.; Mendéz, Y.A.D.; Alexandrino, P.D.S.L.; da Cunha, S.S., Jr.; Ancelotti, A.C., Jr. The use of intelligent computational tools for damage detection and identification with an emphasis on composites—A review. Compos. Struct. 2018, 196, 44–54. [Google Scholar] [CrossRef]
- Zhang, Z.; Shankar, K.; Ray, T.; Morozov, E.V.; Tahtali, M. Vibration-based inverse algorithms for detection of delamination in composites. Compos. Struct. 2013, 102, 226–236. [Google Scholar] [CrossRef]
- Orłowska, A.; Kołakowski, P.; Holnicki-Szulc, J. Detecting delamination zones in composites by embedded electrical grid and thermographic methods. Smart Mater. Struct. 2011. [Google Scholar] [CrossRef]
- Rezaiee-Pajand, M.; Shahabian, F.; Tavakoli, F.H. Delamination detection in laminated composite beams using hybrid elements. Compos. Struct. 2012, 94, 2777–2792. [Google Scholar] [CrossRef]
- Ihesiulor, O.K.; Shankar, K.; Zhang, Z.; Ray, T. Delamination detection with error and noise polluted natural frequencies using computational intelligence concepts. Compos. Part B Eng. 2014, 56, 906–925. [Google Scholar] [CrossRef]
- Sha, G.; Cao, M.; Radzieński, M.; Ostachowicz, W. Delamination-induced relative natural frequency change curve and its use for delamination localization in laminated composite beams. Compos. Struct. 2019, 230, 111501. [Google Scholar] [CrossRef]
- Manoach, E.; Warminski, J.; Kloda, L.; Teter, A. Numerical and experimental studies on vibration based methods for detection of damage in composite beams. Compos. Struct. 2017, 170, 26–39. [Google Scholar] [CrossRef]
- Yang, C.; Oyadiji, S.O. Damage detection using modal frequency curve and squared residual wavelet coefficients-based damage indicator. Mech. Syst. Signal Process. 2017, 83, 385–405. [Google Scholar] [CrossRef]
- Katunin, A. Vibration-based spatial damage identification in honeycomb-core sandwich composite structures using wavelet analysis. Compos. Struct. 2014, 118, 385–391. [Google Scholar] [CrossRef]
- Chiariottia, P.; Martarelli, M.; Revel, G.M. Delamination detection by Multi-Level Wavelet Processing of Continuous Scanning Laser Doppler Vibrometry data. Opt. Lasers Eng. 2017, 99, 66–79. [Google Scholar] [CrossRef]
- He, M.; Zhang, Z.; Ramakrishnan, K.R. Delamination Identification for FRP Composites with Emphasis on Frequency-Based Vibration Monitoring-A Review. Struct. Durab. Heal. Monit. 2018, 12, 213–256. [Google Scholar] [CrossRef]
- Fan, W.; Qiao, P. Vibration-based Damage Identification Methods: A Review and Comparative Study. Struct. Heal. Monit. 2010, 10, 83–111. [Google Scholar] [CrossRef]
- Gałęzia, A.; Gumiński, R.; Jasiński, M.; Mączak, J. Application of energy operators for detection of failures in gearboxes. Mech. Res. Commun. 2017, 82, 3–8. [Google Scholar] [CrossRef]
- Luo, H.; Hanagud, S. Dynamics of delaminated beams. Int. J. Solids Struct. 2000, 37, 1501–1519. [Google Scholar] [CrossRef]
- Singh, A.K.; Chen, B.Y.; Tan, V.B.C.; Tay, T.E.; Lee, H.P. Finite element modeling of nonlinear acoustics/ultrasonics for the detection of closed delaminations in composites. Ultrasonics 2017, 74, 89–98. [Google Scholar] [CrossRef] [PubMed]
- Shen, M.-H.H.; Grady, J.E. Free vibrations of delaminated beams. AIAA J. 1992, 30, 1361–1370. [Google Scholar] [CrossRef] [Green Version]
- Matlab R2020a. Available online: https://nl.mathworks.com/help/matlab/ref/spline.html (accessed on 2 May 2020).
- Brandt, A. Noise and Vibration Analysis: Signal Analysis and Experimental Procedures; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar] [CrossRef]
- Feldman, M. Hilbert Transform Applications in Mechanical Vibration; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar] [CrossRef]
- Kaiser, J.F. On a simple algorithm to calculate the ‘energy’ of a signal. In Proceedings of the International Conference on Acoustics Speech, and Signal Processing, Albuquerque, NM, USA, 3–6 April 1990; pp. 381–384. [Google Scholar]
- Maragos, P.; Potamianos, A. Higher order differential energy operators. IEEE Signal Process. Lett. 1995, 2, 152–154. [Google Scholar] [CrossRef]
- Kaiser, J.F. On Teager’s Energy Algorithm and its generalization to continuous signals—A simple algorithm to calculate the ’energy’ of a signal. In Proceedings of the 4th IEEE Digital Signal Processing Workshop, New Paltz, NY, USA, 16–19 September 1990. [Google Scholar]
- Kvedalen, E. Signal Processing Using the Teager Energy Operator and Other Nonlinear Operators. Masters Thesis, University of Oslo, Oslo, Norway, May 2003. Available online: https://citeseerx.ist.psu.edu/viewdoc/download;jsessionid=7A993F17F2C3E6F0ED246214466F856F?doi=10.1.1.216.4519&rep=rep1&type=pdf (accessed on 21 January 2001).
- Maragos, P.; Kaiser, J.F.; Quatieri, T. On amplitude and frequency demodulation using energy operators. IEEE Trans. Signal Process. 1993, 41, 1532–1550. [Google Scholar] [CrossRef]
- Liang, M.; Soltani, B. An energy operator approach to joint application of amplitude and frequency-demodulation for bearing fault detection. Mech. Syst. Signal Process. 2010, 24, 1473–1494. [Google Scholar] [CrossRef]
- Antoniadou, I.; Howard, T.P.; Dwyer-Joyce, R.S.; Marshall, M.B.; Naumann, J.; Dervilis, N.; Worden, K. Envelope analysis using the Teager-Kaiser Energy operator for condition monitoring of a wind turbine bearing. Appl. Mech. Mater. 2014, 564, 170–175. [Google Scholar] [CrossRef]
- Gałęzia, A.; Barczewski, R.; Jakubek, B. Possibilities of Faults Detection of Rolling Bearings Using Energetic Descriptors of Vibrations Signals. In Condition Monitoring of Machinery in Non-Stationary Operations; Timofiejczuk, A., Chaari, F., Zimroz, R., Bartelmus, W., Eds.; Springer: Berlin/Heidelberg, Germany, 2018; pp. 329–337. [Google Scholar] [CrossRef]
- Maragos, P.; Kaiser, J.F.; Quatieri, T.F. Energy separation in signal modulations with application to speech analysis. IEEE Trans. Signal Process. 1993, 41, 3024–3051. [Google Scholar] [CrossRef]
- Maragos, P.; Kaiser, J.F.; Quatieri, T.F. On separating amplitude from frequency modulations using energy operators. In Proceedings of the ICASSP-92: 1992 IEEE International Conference on Acoustics, Speech, and Signal Processing, San Francisco, CA, USA, 23–26 March 1992. [Google Scholar] [CrossRef]
- Salzenstein, F.; Boudraa, A.-O.; Cexus, J.-C. Generalized higher-order nonlinear energy operators. J. Opt. Soc. Am. A. 2007, 24, 3717–3727. [Google Scholar] [CrossRef]
- Potamianos, A.; Maragos, P. Speach formant frequency and bandwidth tracking using multiband energy demodulation. J. Acoust. Soc. Am. 1996, 99, 3795–3806. [Google Scholar] [CrossRef]
- Goyal, K.; Jorge, V.R. Micro-Scale Crack Propagation Using the eXtended Finite Element Method. In Proceedings of the 57th AIAA/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, San Diego, CA, USA, 4–8 January 2016; pp. 1–24. [Google Scholar] [CrossRef]
- Johnson, K.L. Contact Mechanics; Cambridge University Press: Cambridge, UK, 1987. [Google Scholar]
- Wriggers, P.; Laursen, T. Computational Contact Mechanics; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Ansys 17.1, Help. Available online: https://www.ansys.com/-/media/ansys/corporate/files/pdf/solutions/it-professionals/platform-support/platform-support-by-application-171.pdf?la=en&hash=E6566109CA6A9B691A45F5D9C19E4BE1F5985BAF (accessed on 1 March 2021).
- Cawley, P.; Adams, R.D. The location of defects in structures from measurements of natural frequencies. J. Strain Anal. Eng. Des. 1979, 14, 49–57. [Google Scholar] [CrossRef]
- Pandey, A.K.; Biswas, M.; Samman, M.M. Damage detection from changes in curvature mode shapes. J. Sound Vib. 1991, 145, 321–332. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Decaying Factor | Signal Duration [s] | Mean Frequency [Hz] | Maximum Frequency [Hz] | Minimum Frequency [Hz] | Standard Deviation of Frequency |
| 1 | 10 | 10.0162 | 11.3782 | 8.2789 | 0.9693 |
| 0.9 | 10 | 10.0155 | 11.6189 | 7.6486 | 0.9706 |
| 0.8 | 4.8994 | 10.0141 | 11.4111 | 7.2562 | 0.9704 |
| 0.7 | 2.3489 | 10.0032 | 11.4144 | 7.2461 | 0.9753 |
| 0.6 | 1.3455 | 9.9901 | 11.4354 | 7.2396 | 0.9805 |
| 0.5 | 0.8517 | 9.9698 | 11.3830 | 7.2315 | 0.9833 |
| 0.4 | 0.5732 | 9.9718 | 11.3523 | 7.2258 | 0.9824 |
| 0.3 | 0.4007 | 10.0263 | 11.3871 | 7.2232 | 0.9978 |
| 0.2 | 0.2855 | 10.0047 | 11.5053 | 7.2376 | 1.0157 |
| 0.1 | 0.2013 | 10.0841 | 11.7125 | 7.2946 | 1.0396 |
| E11 [GPa] | E22 [GPa] | G12 [GPa] | ν12 | ρ [kg/m 3] |
|---|---|---|---|---|
| 17.4 | 17.4 | 1.45 | 0.3 | 2075 |
| Point | |||||
|---|---|---|---|---|---|
| Mean | Maximum | Minimum | Standard Deviation | ||
| 0.2 | delam | 25.915 | 26.328 | 25.469 | 0.204 |
| tip | 25.993 | 26.293 | 25.743 | 0.153 | |
| 0.3 | delam | 25.624 | 26.304 | 24.968 | 0.310 |
| tip | 25.993 | 26.293 | 25.743 | 0.153 | |
| 0.4 | delam | 25.147 | 26.691 | 23.525 | 1.065 |
| tip | 24.995 | 25.451 | 24.663 | 0.192 | |
| 0.5 | delam | 24.739 | 27.641 | 21.970 | 1.563 |
| tip | 24.313 | 25.158 | 23.817 | 0.326 | |
| 0.6 | delam | 20.658 | 24.784 | 16.526 | 2.651 |
| tip | 22.949 | 24.041 | 22.258 | 0.401 | |
| Specimen (Ratio) | Bending Modal Frequency [Hz] | Weight [g] | Average Width [m] | ||||
| 1st | 2nd | 3rd | 4th | 5th | |||
| 00—without delamination (0) | 29.07 | 184.72 | 522.41 | 1014.36 | 1694.77 | 8.9 | 0.00143 |
| 20—with delamination (0.2) | 30.07 | 184.73 | 499.66 | 1036.46 | 1534.63 | 8.8 | 0.00153 |
| 40—with delamination (0.4) | 28.43 | 192.13 | 429.18 | 914.43 | 1451.81 | 9 | 0.00159 |
| 60—with delamination (0.6) | 28.45 | 185.33 | 403.95 | 780.89 | 1320.15 | 9 | 0.00149 |
| Sample | Meas. Point | [Hz] | [Hz] | ||||
| 00 | M1 | 29.0347 | 0.2268 | 0.0078 | 0.824 | 1.3436 | 0.1345 |
| M2 | 28.9857 | 0.1688 | 0.058 | 0.707 | |||
| 20 | M1 | 29.9945 | 0.5557 | 0.0185 | 3.508 | 2.2192 | 2.2024 |
| M2 | 29.9481 | 0.2504 | 0.0084 | 1.169 | |||
| 40 | M1 | 28.4434 | 1.4609 | 0.0514 | 4.366 | 7.0780 | 7.0411 |
| M2 | 28.4013 | 0.2064 | 0.0073 | 0.704 | |||
| 60 | M1 | 27.2422 | 3.5267 | 0.1295 | 10.532 | 4.1781 | 4.3311 |
| M2 | 28.1925 | 0.8441 | 0.0299 | 2.886 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gałęzia, A.; Orłowska-Gałęzia, A. Application of Teager–Kaiser’s Instantaneous Frequency for Detection of Delamination in FRP Composite Materials. Materials 2021, 14, 1154. https://doi.org/10.3390/ma14051154
Gałęzia A, Orłowska-Gałęzia A. Application of Teager–Kaiser’s Instantaneous Frequency for Detection of Delamination in FRP Composite Materials. Materials. 2021; 14(5):1154. https://doi.org/10.3390/ma14051154
Chicago/Turabian StyleGałęzia, Adam, and Anita Orłowska-Gałęzia. 2021. "Application of Teager–Kaiser’s Instantaneous Frequency for Detection of Delamination in FRP Composite Materials" Materials 14, no. 5: 1154. https://doi.org/10.3390/ma14051154
APA StyleGałęzia, A., & Orłowska-Gałęzia, A. (2021). Application of Teager–Kaiser’s Instantaneous Frequency for Detection of Delamination in FRP Composite Materials. Materials, 14(5), 1154. https://doi.org/10.3390/ma14051154