
Rate-Dependent Hysteresis Modeling and Displacement Tracking Control Based on Least-Squares SVM for Axially Pre-Compressed Macro-Fiber Composite Bimorph

Abstract
:1. Introduction
2. Rate-Dependent Hysteresis Modeling
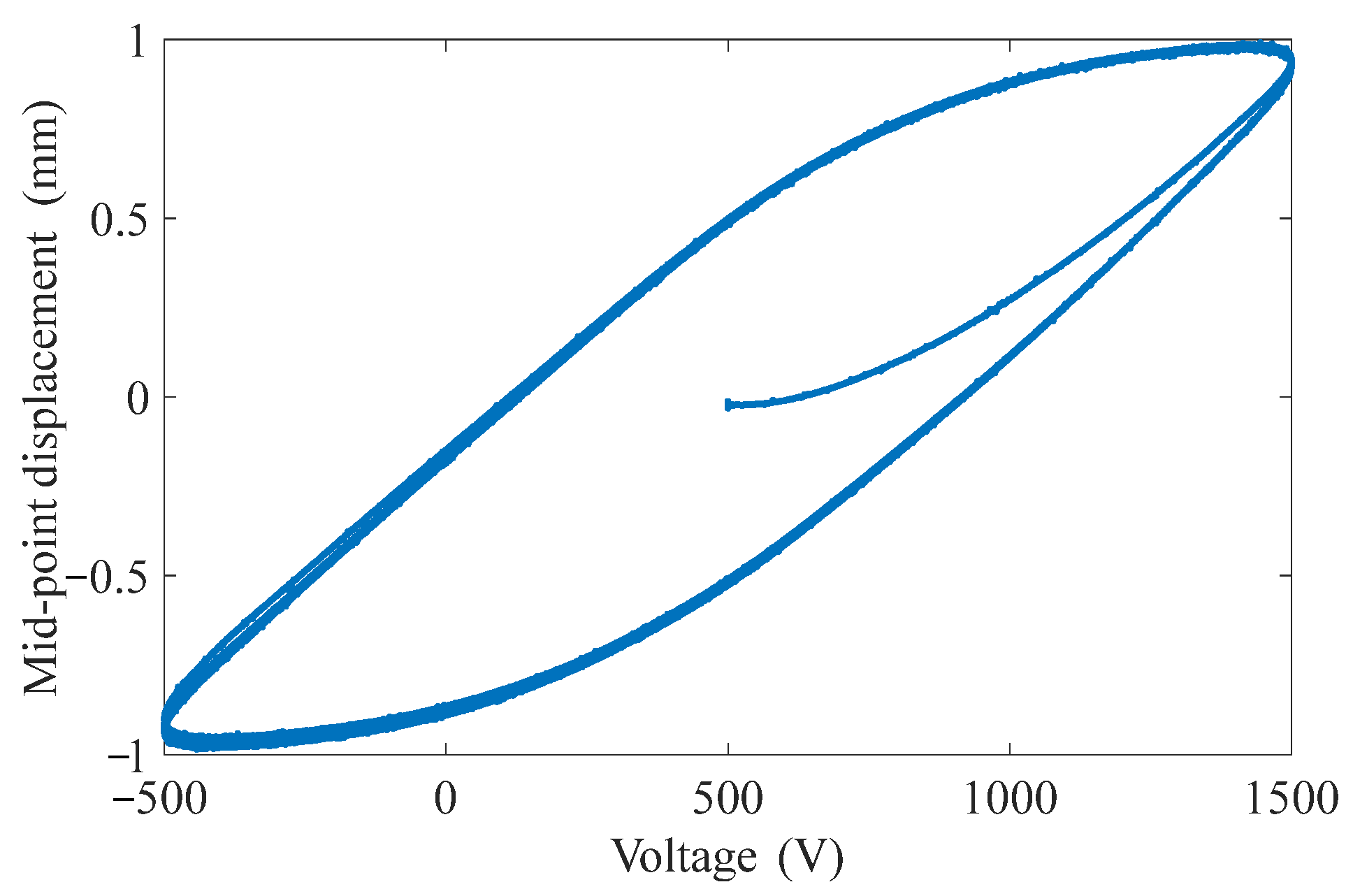
2.1. Measurements Systems for Rate-Dependent Hysteresis
2.2. Series Model of Bouc–Wen Model and Hammerstein Model
2.3. LS-SVM Regression Model
3. Model Parameter Identification and Model Comparison
3.1. Parameters Identification of BW-H Model
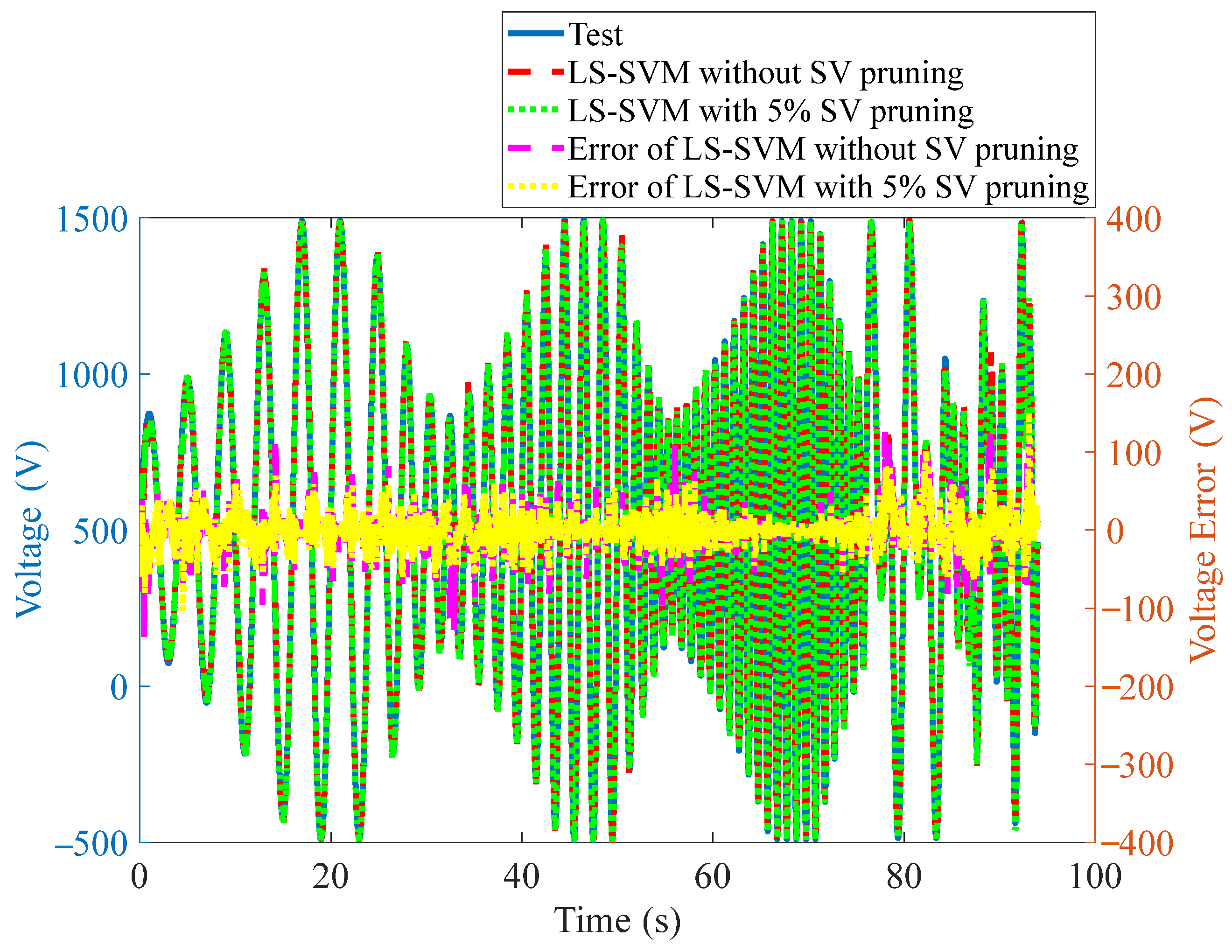
3.2. Parameters Identification of LS-SVM Model
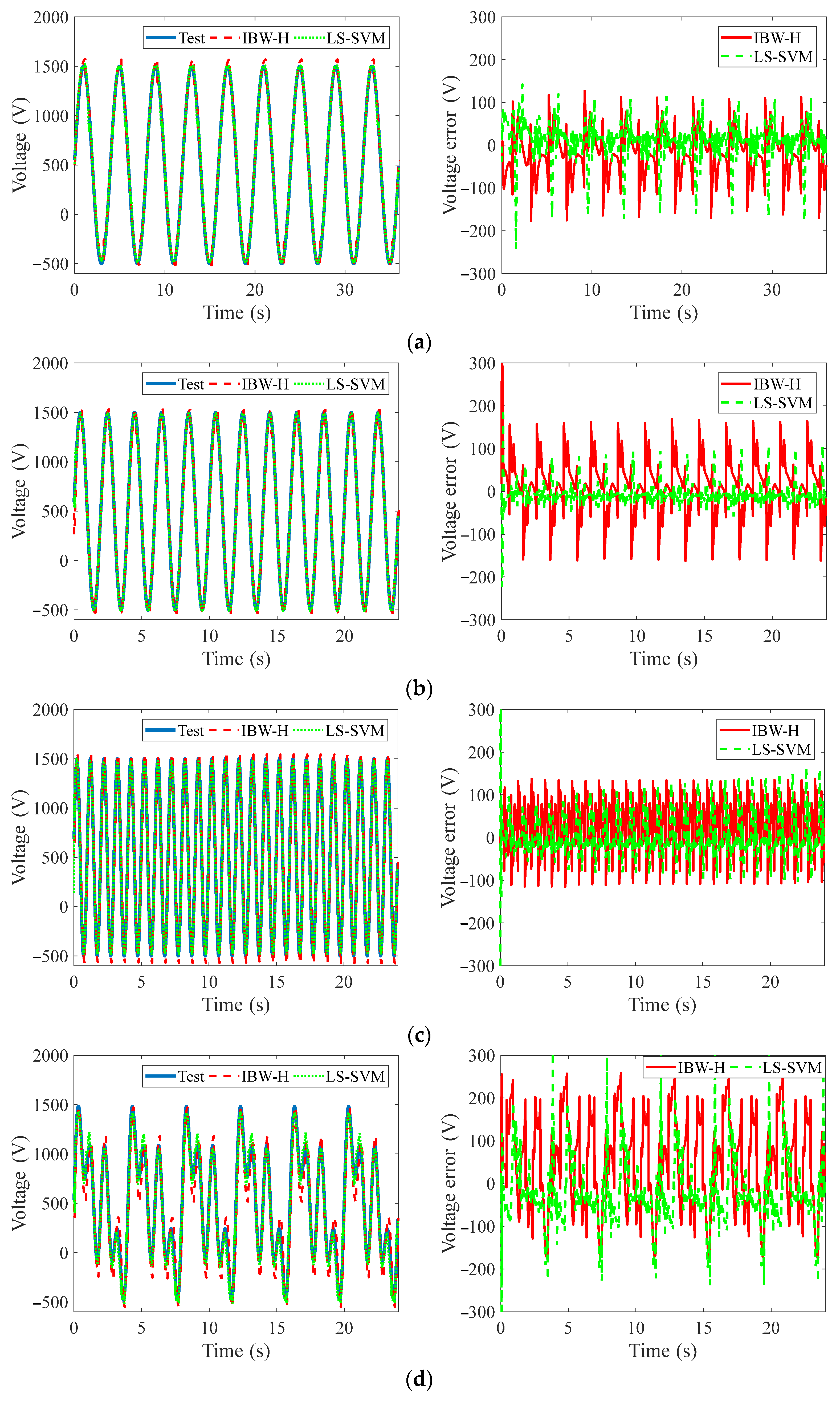
3.3. Generalization Ability Comparison of Two Models
4. Displacement Tracking Control
4.1. Driving Voltage Predication
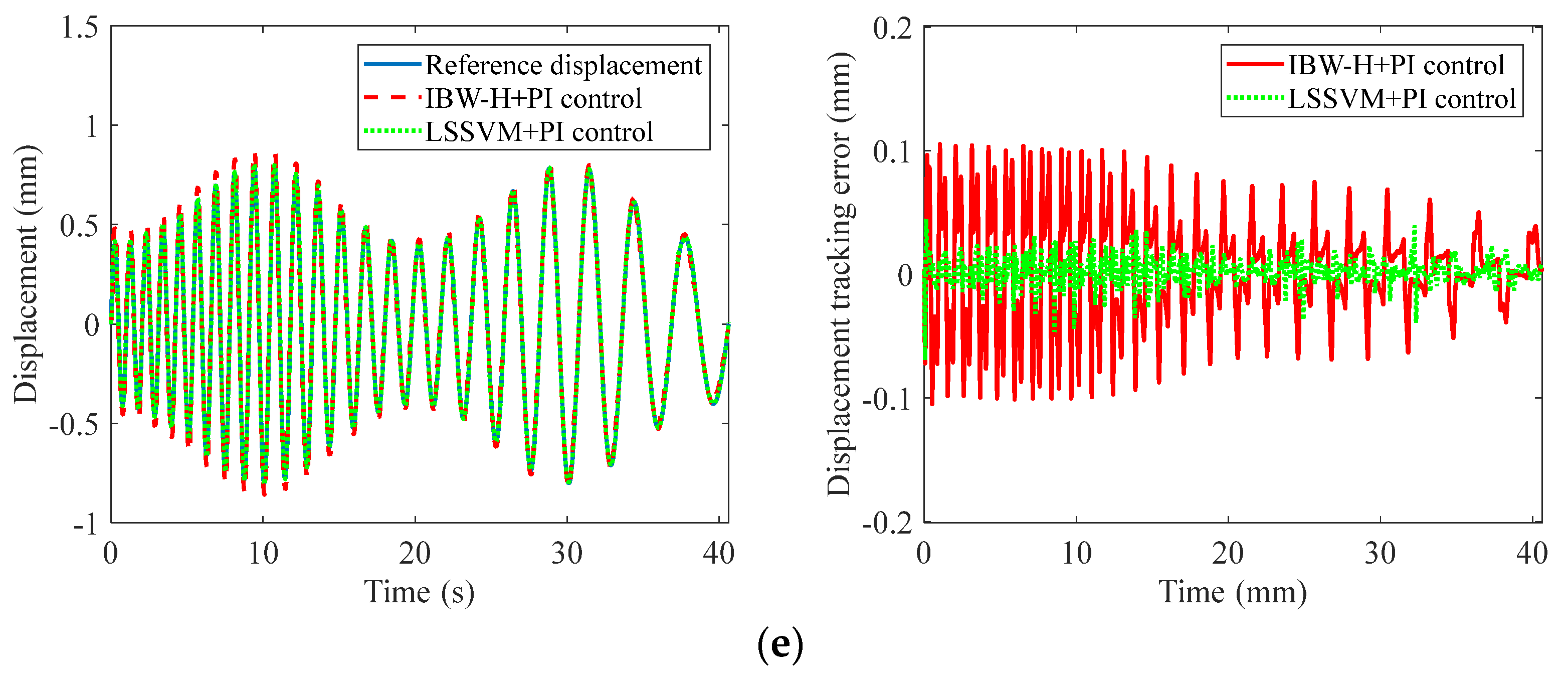
4.2. Tracking Displacement Control
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Barrett, R.; McMurtry, R.; Vos, R.; Tiso, P.; Breuker, R.D. Post-buckled precompressed piezoelectric flight control actuator design, development and demonstration. Smart Mater. Struct. 2006, 15, 1323–1331. [Google Scholar] [CrossRef]
- Vos, R.; Barrett, R. Post-buckled precompressed (PBP) subsonic micro flight control actuators and surfaces. Smart Mater. Struct. 2008, 17, 055011. [Google Scholar]
- Vos, R.; Barrett, R. Post-buckled precompressed techniques in adaptive aerostructures an overview. J. Mech. Design 2010, 132, 031004. [Google Scholar] [CrossRef]
- Smart Material Corp, MFC Engineering Properties. 2022. Available online: Https://www.smart-material.com/MFC-product-mainV2.html (accessed on 10 September 2022).
- Hu, K.M.; Li, H.; Wen, L.H. Experimental study of axial-compressed macro-fiber composite bimorph with multi-layer parallel actuators for large deformation actuation. J. Intell. Mater. Syst. Struct. 2020, 31, 1101–1110. [Google Scholar] [CrossRef]
- Hu, K.M.; Li, H. Large deformation mechanical modeling with bilinear stiffness for Macro-Fiber Composite bimorph based on extending mixing rules. J. Intell. Mater. Syst. Struct. 2021, 32, 127–139. [Google Scholar] [CrossRef]
- Bilgen, O.; Butt, L.M.; Day, S.R.; Sossi, C.A.; Weaver, J.P.; Wolek, A.; Mason, W.H.; Inman, D.J. A novel unmanned aircraft with solid-state control surfaces: Analysis and flight demonstration. J. Intell. Mater. Syst. Struct. 2012, 24, 147–167. [Google Scholar] [CrossRef]
- Trabia, M.B.; Yim, W.; Saadeh, M. Modeling of Hysteresis and Backlash for a Smart Fin with a Piezoelectric Actuator. J. Intell. Mater. Syst. Struct. 2011, 22, 1161–1176. [Google Scholar] [CrossRef]
- Hassani, V.; Tjahjowidodo, T.; Do, T.N. A survey on hysteresis modeling, identification and control. Mech. Syst. Signal Process. 2014, 49, 209–233. [Google Scholar] [CrossRef]
- Cao, Y.; Chen, X.B. A Survey of Modeling and Control Issues for Piezo-electric Actuators. J. Dyn. Syst. Meas. Control 2015, 137, 014001. [Google Scholar] [CrossRef]
- Gu, G.Y.; Zhu, L.M.; Su, C.Y.; Ding, H.; Fatikow, S. Modeling and Control of Piezo-Actuated Nanopositioning Stages: A Survey. IEEE Trans. Autom. Sci. Eng. 2016, 13, 313–332. [Google Scholar] [CrossRef]
- Xie, S.L.; Liu, H.; Wang, Y. A method for the length-pressure hysteresis modeling of pneumatic artificial muscles. Sci. China Technol. Sci. 2020, 63, 829–837. [Google Scholar] [CrossRef]
- Mao, J.Q.; Li, L.; Zhang, Z.; Li, C.; Ma, Y.H. Smart Structure Dynamics and Control; China Science Publishing & Media Ltd.: Beijing, China, 2013. [Google Scholar]
- Arockiarajan, A.; Menzel, A.; Delibas, B.; Seemann, W. Computational modeling of rate-dependent domain switching in piezoelectric materials. Eur. J. Mech. A/Solids 2006, 25, 950–964. [Google Scholar] [CrossRef]
- Sabarianand, D.V.; Karthikeyan, P.; Muthuramalingam, T. A review on control strategies for compensation of hysteresis and creep on piezoelectric actuators based micro systems. Mech. Syst. Signal Process. 2020, 140, 106634. [Google Scholar] [CrossRef]
- Xue, Z.; Li, L.; Ichchou, M.N.; Li, C. Hysteresis and the nonlinear equivalent piezoelectric coefficient of MFCs for actuation. Chin. J. Aeronaut. 2017, 30, 88–98. [Google Scholar] [CrossRef]
- Chen, L.Q.; Wu, X.H.; Sun, Q.; Xue, X.M. Experimental study on the electromechanical hysteresis property of macro fiber composite actuator. Int. J. Acoust. Vib. 2017, 22, 467–480. [Google Scholar]
- Yang, Y.L.; Wei, Y.D.; Lou, J.Q.; Fu, L.; Tian, G.; Wu, M. Hysteresis modeling and precision trajectory control for a new MFC micromanipulator. Sens. Actuat. A-Phys. 2016, 247, 37–52. [Google Scholar] [CrossRef]
- Kaltenbacher, B.; Krejčí, P. A thermodynamically consistent phenomenological model for ferroelectric and ferroelastic hysteresis. ZAMM-J. Appl. Math. Mech./Z. Für Angew. Math. Und Mech. 2016, 96, 874–891. [Google Scholar] [CrossRef]
- Cheng, L.; Liu, M.C.; Hou, J.Z.; Ui, J.Z.; Tan, M. Neural-Network-Based Nonlinear Model Predictive Control for Piezoelectric Actuators. IEEE Trans. Ind. Electron. 2015, 62, 7717–7727. [Google Scholar] [CrossRef]
- Xu, Q.; Wong, P.K. Hysteresis modeling and compensation of a piezostage using least squares support vector machines. Mechatronics 2011, 21, 1239–1251. [Google Scholar] [CrossRef]
- Suykens, J.A.K.; Brabanter, J.D.; Lukas, L.; Vandewalle, J. Weighted least squares support vector machines robustness and sparse approximation. Neurocomputing 2002, 48, 85–105. [Google Scholar] [CrossRef]
- Mao, X.F.; Wang, Y.J.; Liu, X.D.; Guo, Y.G. An adaptive weighted least square support vector regression for hysteresis in piezoelectric actuators. Sens. Actuat. A-Phys. 2017, 263, 423–429. [Google Scholar] [CrossRef]
- Kuh, A.; Wilde, P.D. Comments on “Pruning error minimization in least squares support vector machines”. IEEE Trans. Neural Netw. 2007, 18, 606–609. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Qin, F.; Zhang, D.P.; Xing, D.P.; Xu, D.; Li, J.Q. Laser Beam Pointing Control with Piezoelectric Actuator Model Learning. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 1024–1034. [Google Scholar] [CrossRef]
- Cui, Y.G.; Sun, B.Y.; Dong, W.J.; Yang, Z.X. Causes for hysteresis and nonlinearity of piezoelectric ceramic actuators. Opt. Precision Eng. 2003, 11, 270–275. [Google Scholar]
- Yang, Y.W.; Upadrashta, D. Modeling of geometric, material and damping nonlinearities in piezoelectric energy harvesters. Nonlinear Dynam. 2016, 84, 2487–2504. [Google Scholar] [CrossRef]
- Kim, B.; Washington, G.N.; Yoon, H.S. Control and hysteresis reduction in prestressed curved unimorph actuators using model predictive control. J. Intell. Mater. Syst. Struct. 2013, 25, 290–307. [Google Scholar] [CrossRef]
- Hu, K.M.; Wen, L.H. Research on rate-dependent hysteresis characteristics of PBP actuators and its linearization control. J. Mech. Eng. 2016, 52, 205–212. [Google Scholar] [CrossRef]
- Liu, P.; Zhang, Z.; Mao, J.Q. Modeling and Control for Giant Magnetostrictive Actuators with Rate-Dependent Hysteresis. J. Appl. Math. 2013, 427213. [Google Scholar] [CrossRef] [Green Version]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | d | α | β | γ | n |
| values | 1.430 × 10−³ | 1.259 × 10−³ | 0.1631 | 2.670 × 10−4 | 7.501 |
| Cases | 0.25 Hz | 0.5 Hz | 1 Hz | 0.25/0.5/1 Hz | Variable Frequency and Amplitude |
|---|---|---|---|---|---|
| BW-H | 6.28% | 7.60% | 7.33% | 15.85% | 12.18% |
| LS-SVM | 4.88% | 2.83% | 5.63% | 11.00% | 5.89% |
| Cases | 0.25 Hz | 0.5 Hz | 1 Hz | 0.25/0.5/1 Hz | Variable Frequency and Amplitude |
|---|---|---|---|---|---|
| BW-H+PI | 3.07% | 6.07% | 15.22% | 14.75% | 8.05% |
| LS-SVM+PI | 2.82% | 3.77% | 3.81% | 7.24% | 2.26% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, K.; Ge, H.; Li, H.; Xie, S.; Xu, S. Rate-Dependent Hysteresis Modeling and Displacement Tracking Control Based on Least-Squares SVM for Axially Pre-Compressed Macro-Fiber Composite Bimorph. Materials 2022, 15, 6480. https://doi.org/10.3390/ma15186480
Hu K, Ge H, Li H, Xie S, Xu S. Rate-Dependent Hysteresis Modeling and Displacement Tracking Control Based on Least-Squares SVM for Axially Pre-Compressed Macro-Fiber Composite Bimorph. Materials. 2022; 15(18):6480. https://doi.org/10.3390/ma15186480
Chicago/Turabian StyleHu, Kaiming, Hujian Ge, Hua Li, Shenglong Xie, and Suan Xu. 2022. "Rate-Dependent Hysteresis Modeling and Displacement Tracking Control Based on Least-Squares SVM for Axially Pre-Compressed Macro-Fiber Composite Bimorph" Materials 15, no. 18: 6480. https://doi.org/10.3390/ma15186480
APA StyleHu, K., Ge, H., Li, H., Xie, S., & Xu, S. (2022). Rate-Dependent Hysteresis Modeling and Displacement Tracking Control Based on Least-Squares SVM for Axially Pre-Compressed Macro-Fiber Composite Bimorph. Materials, 15(18), 6480. https://doi.org/10.3390/ma15186480