
Quantitative Assessment of the Influence of Tensile Softening of Concrete in Beams under Bending by Numerical Simulations with XFEM and Cohesive Cracks



Abstract
:1. Introduction
2. Significance of Research
3. Experiment by Hoover
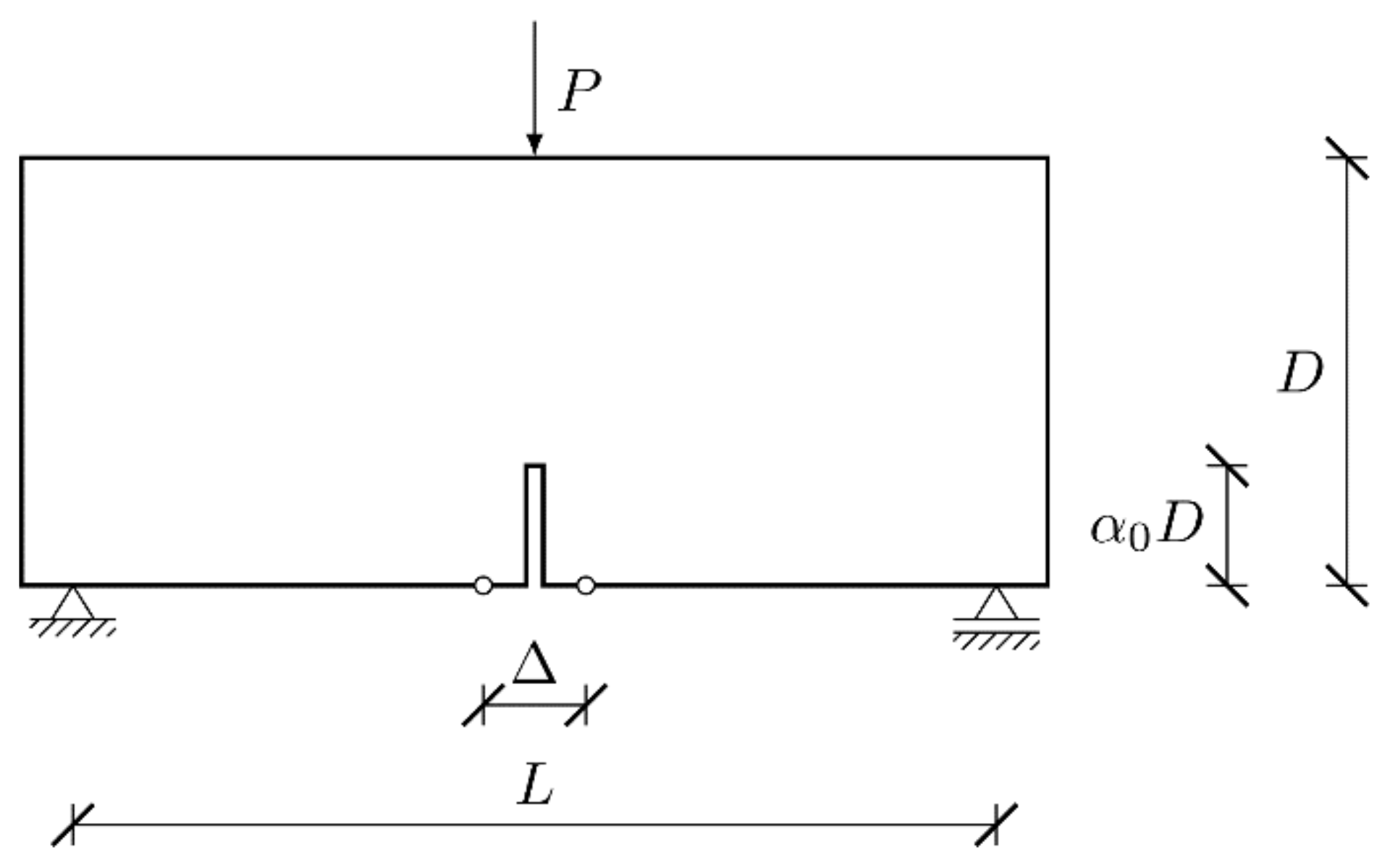
3.1. Geometry of the Beams
3.2. Experimental Results
4. Constitutive Laws
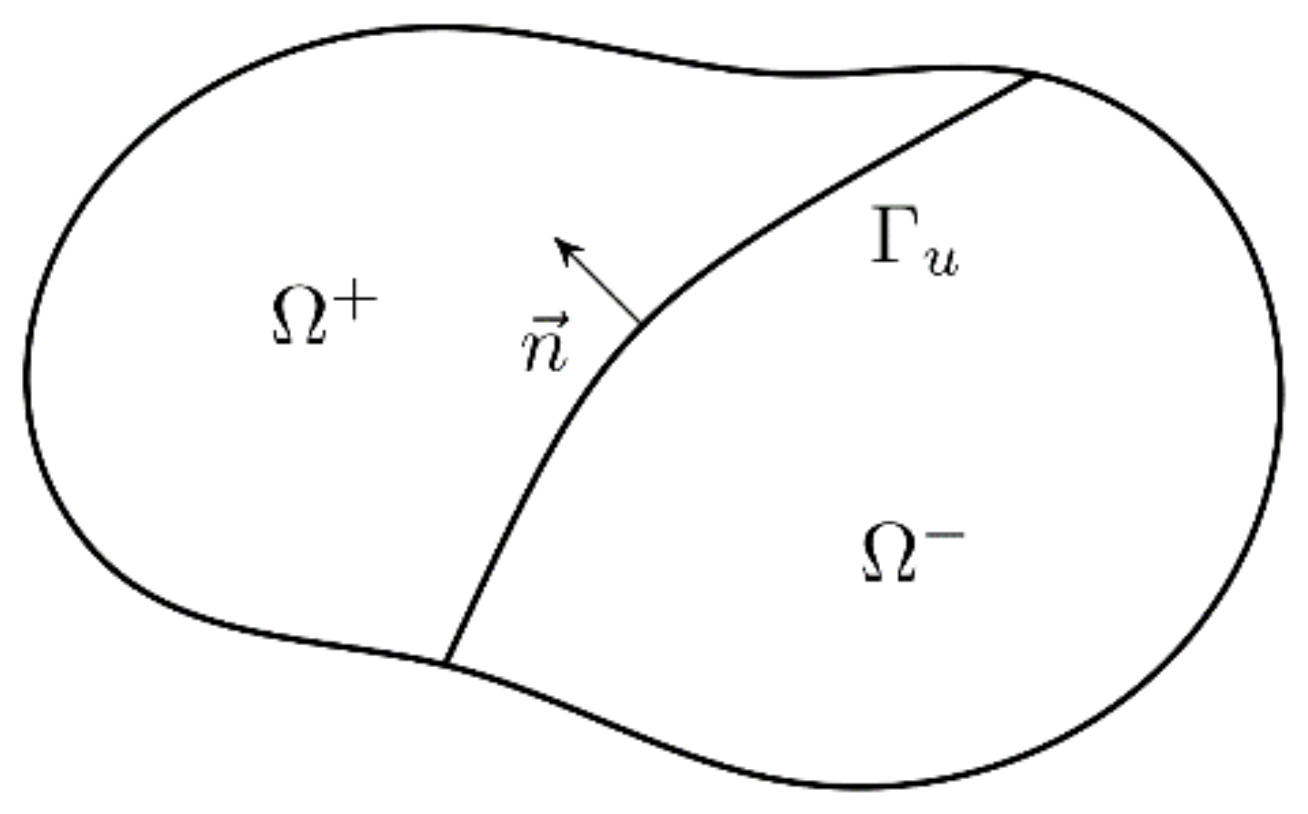
4.1. General Formulation
4.2. Bulk Material Description
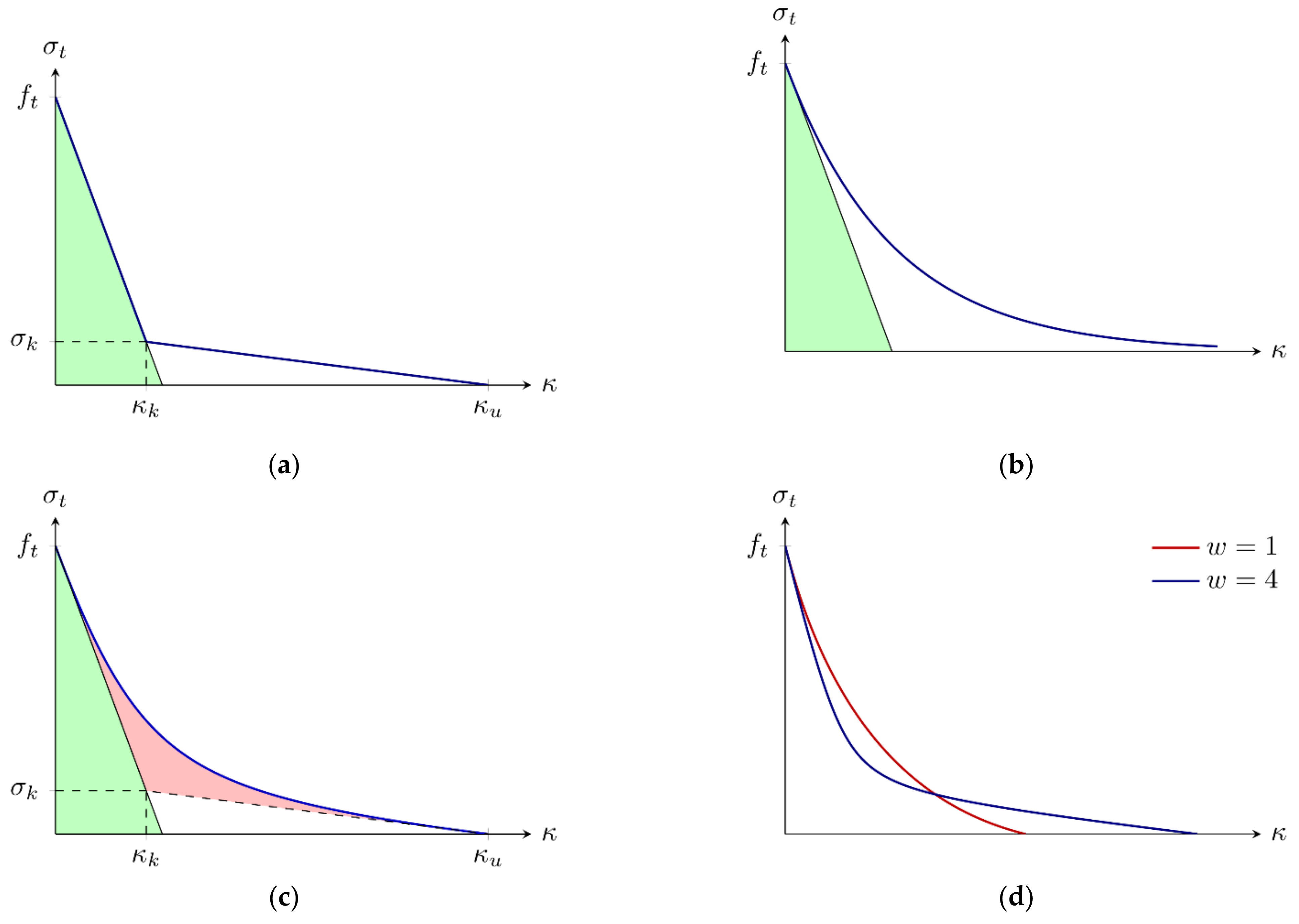
4.3. Discrete Crack Definiton
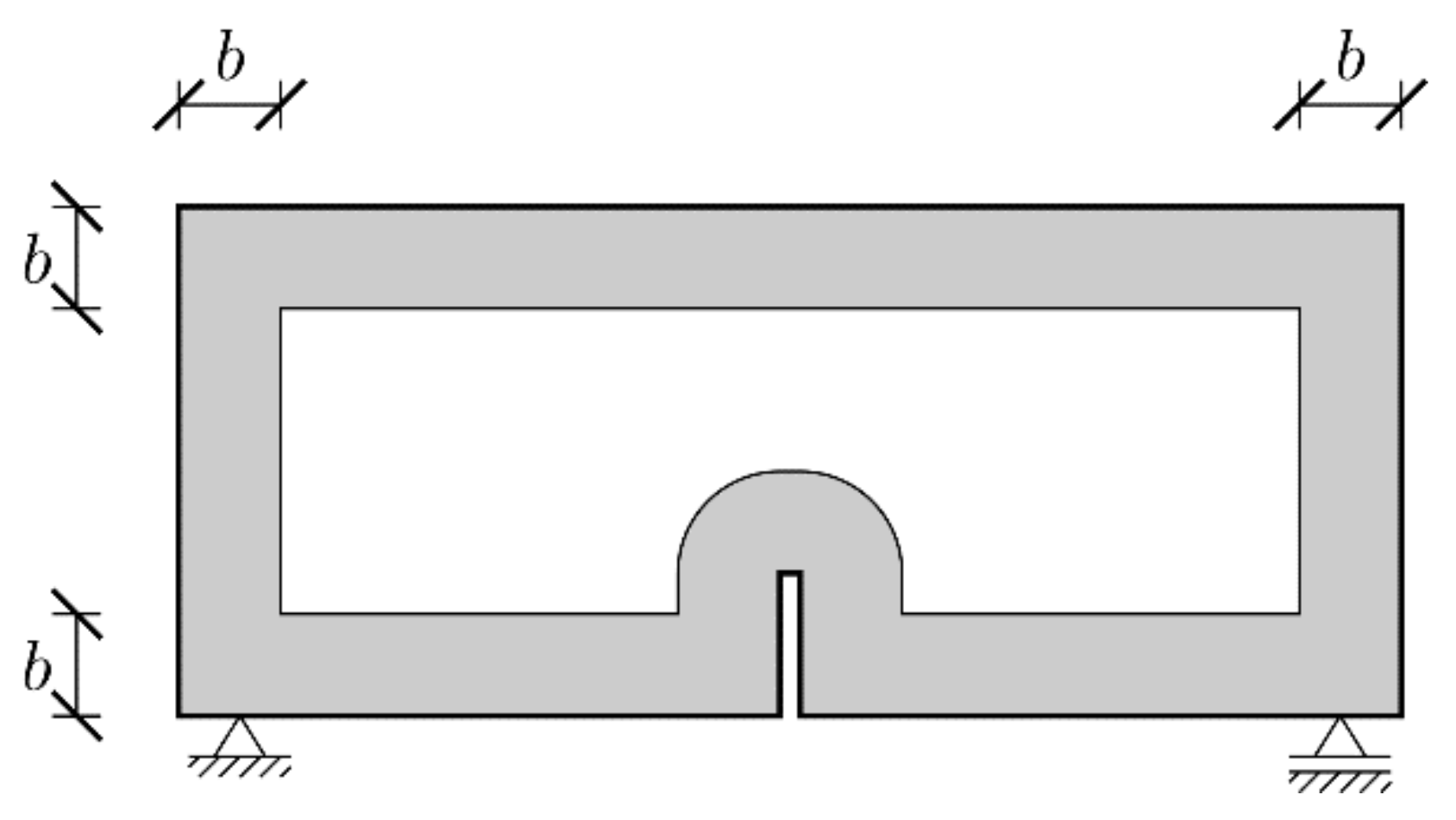
4.4. Boundary Layer
4.5. Implementation
5. FE-Simulations
5.1. Input Data
5.2. Error Measures
5.3. Bilinear Softening
5.3.1. Huge and Small Beams
5.3.2. All Beam Geometries
5.3.3. Boundary Layer
5.3.4. Notched Beams
5.4. Exponential Softening
5.5. Bezier Rational Curve
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Pivonka, P.; Ožbolt, J.; Lackner, R.; Mang, H.A. Comparative studies of 3D-constitutive models for concrete: Application to mixed-mode fracture. Int. J. Numer. Methods Eng. 2004, 60, 549–570. [Google Scholar] [CrossRef]
- Marzec, I.; Tejchman, J.; Winnicki, A. Computational simulations of concrete behaviour under dynamic conditions using elasto-visco-plastic model with non-local softening. Comput. Concr. 2015, 15, 515–545. [Google Scholar] [CrossRef]
- Manzoli, O.L.; Oliver, J.; Diaz, G.; Huespe, A.E. Three-dimensional analysis of reinforced concrete members via embedded discontinuity finite elements. IBRACON Struct. Mater. J. 2008, 1, 58–83. [Google Scholar] [CrossRef] [Green Version]
- Skarżyński, Ł.; Marzec, I.; Tejchman, J. Experiments and numerical analyses for composite RC-EPS slabs. Comput. Concr. 2017, 20, 689–704. [Google Scholar] [CrossRef]
- Marzec, I.; Tejchman, J.; Mróz, A. Numerical analysis of size effect in RC beams scaled along height or length using elasto-plastic-damage model enhanced by non-local softening. Finite Elem. Anal. Des. 2019, 157, 1–20. [Google Scholar] [CrossRef]
- Skarżyński, Ł.; Marzec, I.; Drąg, K.; Tejchman, J. Numerical analyses of novel prefabricated structural wall panels in residential buildings based on laboratory tests in scale 1:1. Eur. J. Environ. Civ. Eng. 2020, 24, 1450–1482. [Google Scholar] [CrossRef]
- Grassl, P.; Jirásek, M. Damage-plastic model for concrete failure. Int. J. Solids Struct. 2006, 43, 7166–7196. [Google Scholar] [CrossRef] [Green Version]
- Mazars, J.; Hamon, F.; Grange, S. A new 3d damage model for concrete under monotonic, cyclic and dynamic load. Mater. Struct. 2015, 48, 3779–3793. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Zhang, M.; Jivkov, A.P. Computational technology for analysis of 3D meso-structure effects on damage and failure of concrete. Int. J. Solids Struct. 2016, 80, 310–333. [Google Scholar] [CrossRef]
- Trawiński, W.; Tejchman, J.; Bobiński, J. A three-dimensional meso-scale modelling of concrete fracture, based on cohesive elements and X-ray μCT images. Eng. Fract. Mech. 2018, 189, 27–50. [Google Scholar] [CrossRef]
- Wells, G.N.; Sluys, L.J. A new method for modelling cohesive cracks using finite elements. Int. J. Numer. Methods Eng. 2001, 50, 2667–2682. [Google Scholar] [CrossRef]
- Unger, J.F.; Eckardt, S.; Könke, C. Modelling of cohesive crack growth in concrete structures with the extended finite element method. Comput. Methods Appl. Mech. Eng. 2007, 196, 4087–4100. [Google Scholar] [CrossRef]
- Im, S.; Ban, H.; Kim, Y.-R. Characterization of mode-I and mode-II fracture properties of fine aggregate matrix using a semicircular specimen geometry. Constr. Build. Mater. 2014, 52, 413–421. [Google Scholar] [CrossRef]
- Dong, Z.; Gong, X.; Zhao, L.; Zhang, L. Mesostructural damage simulation of asphalt mixture using microscopic interface contact models. Constr. Build. Mater. 2014, 53, 665–673. [Google Scholar] [CrossRef]
- Wang, X.; Li, K.; Zhong, Y.; Xu, Q.; Li, C. XFEM simulation of reflective crack in asphalt pavement structure under cyclic temperature. Constr. Build. Mater. 2018, 189, 1035–1044. [Google Scholar] [CrossRef]
- Haeri, H.; Sarfarazi, V.; Ebneabbasi, P.; Nazari Maram, A.; Shahbazian, A.; Fatehi Marji, M.; Mohamadi, A.R. XFEM and experimental simulation of failure mechanism of non-persistent joints in mortar under compression. Constr. Build. Mater. 2020, 236, 117500. [Google Scholar] [CrossRef]
- Perego, U.; Comi, C.; Mariani, S. An extended FE strategy for transition from continuum damage to mode I cohesive crack propagation. Int. J. Numer. Anal. Methods Geomech. 2007, 31, 213–238. [Google Scholar] [CrossRef]
- Bobiński, J.; Tejchman, J. A coupled constitutive model for fracture in plain concrete based on continuum theory with non-local softening and eXtended Finite Element Method. Finite Elem. Anal. Des. 2016, 114, 1–21. [Google Scholar] [CrossRef]
- Petersson, P.E. Crack Growth and Development of Fracture Zones in Plain Concrete and Similar Materials; Report TVBM-1006; Division of Building Materials, Lund Institute of Technology: Lund, Sweden, 1981. [Google Scholar]
- Wittmann, F.H.; Rokugo, K.; Bruhwiler, E.; Mihashi, H.; Simopnin, P. Fracture energy and strain softening of concrete as determined by compact tension specimens. Mater. Struct. 1988, 21, 21–32. [Google Scholar] [CrossRef]
- CEB-90. Final Draft CEB-FIP Mode Code 1990; Bulletin Information 203, Committee Euro-International du Beton; Thomas Telford: London, UK, 1991. [Google Scholar]
- Bažant, Z.P. Concrete fracture models: Testing and practice. Eng. Fract. Mech. 2002, 69, 165–205. [Google Scholar] [CrossRef]
- Park, K.; Paulino, G.H.; Roesler, J.R. Determination of the kink point in the bilinear softening model for concrete. Eng. Fract. Mech. 2008, 75, 3806–3818. [Google Scholar] [CrossRef]
- Gopalaratnam, V.S.; Shah, S.P. Softening response of plain concrete in direct tension. ACI J. Proced. 1985, 82, 310–323. [Google Scholar] [CrossRef]
- Reinhardt, H.W.; Cornelissen, H.A.W.; Hordijk, D.A. Tensile tests and failure analysis of concrete. J. Struct. Eng. 1986, 112, 2462–2477. [Google Scholar] [CrossRef]
- Chen, H.H.; Su, R.K.L. Tension softening curves of plain concrete. Constr. Build. Mater. 2013, 44, 440–451. [Google Scholar] [CrossRef] [Green Version]
- Tang, Y.; Chen, H. Characterizations on fracture process zone of plain concrete. J. Civ. Eng. Manag. 2019, 25, 819–830. [Google Scholar] [CrossRef]
- Kumar, S.; Barai, S.V. Effect of softening function on the cohesive crack fracture parameters of concrete CT specimen. Sadhana 2009, 34, 987–1015. [Google Scholar] [CrossRef] [Green Version]
- Dong, W.; Wu, Z.; Zhou, X. Calculating crack extension resistance of concrete based on a new crack propagation criterion. Constr. Build. Mater. 2013, 38, 879–889. [Google Scholar] [CrossRef] [Green Version]
- Carpinteri, A.; Chiaia, B.; Cornetti, P. On the mechanics of quasi-brittle materials with a fractal microstructure. Eng. Fract. Mech. 2003, 70, 2321–2349. [Google Scholar] [CrossRef]
- Wang, L.; Zeng, X.; Yang, H.; Lv, X.; Guo, F.; Shi, Y.; Hanif, A. Investigation and application of fractal theory in cement-based materials: A review. Fractal Fract. 2021, 5, 247. [Google Scholar] [CrossRef]
- Hoover, C.G.; Bažant, Z.P.; Vorel, J.; Wendner, R.; Hubler, M.H. Comprehensive concrete fracture tests: Description and results. Eng. Fract. Mech. 2013, 114, 92–103. [Google Scholar] [CrossRef]
- Hoover, C.G.; Bažant, Z.P. Comprehensive concrete fracture tests: Size effects of types 1 & 2, crack length effect and postpeak. Eng. Fract. Mech. 2013, 110, 281–289. [Google Scholar] [CrossRef]
- Çağlar, Y.; Şener, S. Size effect tests of different notch depth specimens with support rotation measurements. Eng. Fract. Mech. 2016, 157, 43–55. [Google Scholar] [CrossRef]
- Grégoire, D.; Rojas-Solano, L.; Pijaudier-Cabot, G. Failure and size effect for notched and unnotched concrete beams. Int. J. Numer. Anal. Methods Geomech. 2013, 37, 1434–1452. [Google Scholar] [CrossRef]
- Hoover, C.G.; Bažant, Z.P. Universal size-shape effect law based on comprehensive concrete fracture tests. J. Eng. Mech. 2014, 140, 473–479. [Google Scholar] [CrossRef] [Green Version]
- Hu, X.; Guan, J.; Wang, Y.; Keating, A.; Yang, S. Comparison of boundary and size effect models based on new developments. Eng. Fract. Mech. 2017, 175, 146–167. [Google Scholar] [CrossRef]
- Duan, K.; Hu, X.; Wittmann, F.H. Boundary effect on concrete fracture and non-constant fracture energy distribution. Eng. Fract. Mech. 2003, 70, 2257–2268. [Google Scholar] [CrossRef]
- Duan, K.; Hu, X.; Wittmann, F.H. Scaling of quasi-brittle fracture boundary and size effect. Mech. Mater. 2006, 38, 128–141. [Google Scholar] [CrossRef]
- Bažant, Z.; Yu, Q. Universal size effect law and effect of crack depth on quasi-brittle structure strength. J. Eng. Mech. 2009, 135, 78–84. [Google Scholar] [CrossRef] [Green Version]
- Hoover, C.G.; Bažant, Z.P. Cohesive crack, size effect, crack band and work-of-fracture models compared to comprehensive concrete fracture tests. Int. J. Fract. 2014, 187, 133–143. [Google Scholar] [CrossRef] [Green Version]
- Mazars, J. A description of micro- and macroscale damage of concrete structures. Eng. Fract. Mech. 1986, 25, 729–737. [Google Scholar] [CrossRef]
- Lorentz, E. A nonlocal damage model for plain concrete consistent with cohesive fracture. Int. J. Fract. 2017, 207, 123–159. [Google Scholar] [CrossRef]
- Feng, D.-C.; Wu, J.-Y. Phase-field regularized cohesive zone model (CZM) and size effect of concrete. Eng. Fract. Mech. 2018, 197, 66–79. [Google Scholar] [CrossRef]
- Barbat, G.B.; Cervera, M.; Chiumenti, M.; Espinoza, E. Structural size effect: Experimental, theoretical and accurate computational assessment. Eng. Struct. 2020, 213, 110555. [Google Scholar] [CrossRef]
- Parrilla Gómez, A.; Stolz, C.; Moës, N.; Grégoire, D.; Pijaudier-Cabot, G. On the capability of the Thick Level Set (TLS) damage model to fit experimental data of size and shape effects. Eng. Fract. Mech. 2017, 184, 75–87. [Google Scholar] [CrossRef]
- Zhang, Y.; Shedbale, A.S.; Gan, Y.; Moon, J.; Poh, L.H. Size effect analysis of quasi-brittle fracture with localizing gradient damage model. Int. J. Damage Mech. 2021, 30, 1012–1035. [Google Scholar] [CrossRef]
- Wosatko, A.; Pamin, J.; Winnicki, A. Numerical prediction of deterministic size effect in concrete bars and beams. In Computational Modelling of Concrete Structures: Proceedings of the Conference on Computational Modelling of Concrete and Concrete Structures (EURO-C 2018), Bad Hofgastein, Austria, 26 February–1 March 2018; CRC Press: New York, NY, USA, 2018; pp. 447–456. [Google Scholar]
- Marzec, I.; Bobiński, J. On some problems in determining tensile parameters of concrete model from size effect tests. Pol. Marit. Res. 2019, 26, 115–125. [Google Scholar] [CrossRef] [Green Version]
- Havlásek, P.; Grassl, P.; Jirásek, M. Analysis of size effect on strength of quasi-brittle materials using integral-type nonlocal models. Eng. Fract. Mech. 2016, 157, 72–85. [Google Scholar] [CrossRef] [Green Version]
- Bažant, Z.P.; Le, J.-L.; Hoover, C.G. Nonlocal boundary layer (NBL) model: Overcoming boundary condition problems in strength statistics and fracture analysis of quasibrittle materials. In Proceedings of the 7th International Conference on Fracture Mechanics of Concrete and Concrete Structures, Jeju, Korea, 23–28 May 2010; pp. 135–143. [Google Scholar]
- Vořechovský, M. Interplay of size effects in concrete specimens under tension studied via computational stochastic fracture mechanics. Int. J. Solids Struct. 2007, 44, 2715–2731. [Google Scholar] [CrossRef] [Green Version]
- Van Vliet, M.; Van Mier, J. Experimental investigation of size effect in concrete and sandstone under uniaxial tension. Eng. Fract. Mech. 2000, 65, 165–188. [Google Scholar] [CrossRef]
- Van Vliet, M.; Van Mier, J. Size effect of concrete and sandstone. Heron 2000, 45, 91–108. [Google Scholar]
- Melenk, J.M.; Babuška, I. The partition of unity finite element method: Basic theory and applications. Comput. Methods Appl. Mech. Eng. 1996, 139, 289–314. [Google Scholar] [CrossRef] [Green Version]
- Zi, G.; Belytschko, T. New crack-tip elements for XFEM and applications to cohesive cracks. Int. J. Numer. Methods Eng. 2003, 57, 2221–2240. [Google Scholar] [CrossRef]
- Tejchman, J.; Bobiński, J. Continuous and Discontinuous Modelling of Fracture in Concrete Using FEM; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar] [CrossRef]
- Asferg, J.L.; Poulsen, P.N.; Nielsen, L.O. A consistent partly cracked XFEM element for cohesive crack growth. Int. J. Numer. Methods Eng. 2007, 72, 464–485. [Google Scholar] [CrossRef] [Green Version]
- Cox, J.V. An extended finite element method with analytical enrichment for cohesive crack modelling. Int. J. Numer. Methods Eng. 2009, 78, 48–83. [Google Scholar] [CrossRef]
- Abaqus Documentation; Dassault Systèmes: Providence, RI, USA, 2016.
- De Borst, R. Computation of post-bifurcation and post-failure behaviour of strain-softening solids. Comput. Struct. 1987, 25, 211–224. [Google Scholar] [CrossRef] [Green Version]
- Planas, J.; Sanz, B.; Sancho, J.M. Transition from smeared to localized cracking in macro-defect-free quasibrittle structures. Procedia Struct. Integr. 2016, 2, 3676–3683. [Google Scholar] [CrossRef]
- Syroka-Korol, E.; Tejchman, J.; Mróz, Z. FE calculations of a deterministic and statistical size effect in concrete under bending within stochastic elasto-plasticity and non-local softening. Eng. Struct. 2013, 48, 205–219. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| [mm] | ||||
|---|---|---|---|---|
| 40 | 0 | 7.756 | 0.927 | 4.10 |
| 40 | 0.075 | 6.694 | 0.978 | 3.35 |
| 40 | 0.15 | 5.383 | 0.975 | 2.71 |
| 40 | 0.30 | 3.550 | 0.986 | 1.76 |
| 93 | 0 | 7.350 | 0.880 | 9.52 |
| 93 | 0.075 | 5.492 | 0.968 | 6.47 |
| 93 | 0.15 | 4.541 | 0.975 | 5.31 |
| 93 | 0.30 | 3.041 | 0.967 | 3.58 |
| 215 | 0 | 6.295 | 0.972 | 17.07 |
| 215 | 0.025 | 5.323 | 1.032 | 13.59 |
| 215 | 0.075 | 4.591 | 1.018 | 11.88 |
| 215 | 0.15 | 3.678 | 1.023 | 9.47 |
| 215 | 0.30 | 2.551 | 1.042 | 6.45 |
| 500 | 0 | 5.956 | 1.009 | 36.18 |
| 500 | 0.025 | 4.710 | 1.021 | 28.27 |
| 500 | 0.075 | 3.632 | 1.034 | 21.53 |
| 500 | 0.15 | 2.926 | 1.060 | 16.91 |
| 500 | 0.30 | 1.884 | 1.053 | 10.97 |
| [mm] | |||||
|---|---|---|---|---|---|
| S1 | S2 | S3 | S4 | ||
| 40 | 0 | 7.678 | 7.896 | 7.425 | 7.522 |
| 40 | 0.075 | 6.762 | 6.896 | 6.521 | 6.489 |
| 40 | 0.15 | 5.676 | 5.759 | 5.449 | 5.391 |
| 40 | 0.30 | 3.948 | 4.011 | 3.795 | 3.757 |
| 93 | 0 | 7.145 | 7.357 | 6.931 | 7.058 |
| 93 | 0.075 | 5.558 | 5.580 | 5.289 | 5.183 |
| 93 | 0.15 | 4.663 | 4.654 | 4.437 | 4.328 |
| 93 | 0.30 | 3.180 | 3.181 | 3.025 | 2.930 |
| 215 | 0 | 6.067 | 6.314 | 5.912 | 6.133 |
| 215 | 0.025 | 5.625 | 5.691 | 5.394 | 5.380 |
| 215 | 0.075 | 4.691 | 4.642 | 4.437 | 4.253 |
| 215 | 0.15 | 3.833 | 3.784 | 3.618 | 3.430 |
| 215 | 0.30 | 2.686 | 2.632 | 2.528 | 2.406 |
| 500 | 0 | 5.755 | 6.107 | 5.674 | 6.010 |
| 500 | 0.025 | 4.558 | 4.585 | 4.361 | 4.251 |
| 500 | 0.075 | 3.629 | 3.555 | 3.406 | 3.209 |
| 500 | 0.15 | 2.950 | 2.862 | 2.761 | 2.558 |
| 500 | 0.30 | 2.001 | 1.935 | 1.862 | 1.732 |
| [mm] | ||||||
|---|---|---|---|---|---|---|
| S5 | S6 | S7 | S8 | S9 | ||
| 40 | 0 | 7.488 | 7.491 | 7.684 | 7.694 | 7.690 |
| 40 | 0.075 | 6.587 | 6.593 | 6.664 | 6.662 | 6.744 |
| 40 | 0.15 | 5.494 | 5.500 | 5.548 | 5.562 | 5.638 |
| 40 | 0.30 | 3.820 | 3.828 | 3.854 | 3.868 | 3.928 |
| 93 | 0 | 7.026 | 7.018 | 7.229 | 7.225 | 7.171 |
| 93 | 0.075 | 5.411 | 5.403 | 5.441 | 5.435 | 5.483 |
| 93 | 0.15 | 4.553 | 4.545 | 4.514 | 4.510 | 4.579 |
| 93 | 0.30 | 3.096 | 3.091 | 3.068 | 3.064 | 3.130 |
| 215 | 0 | 5.998 | 5.994 | 6.248 | 6.246 | 6.138 |
| 215 | 0.025 | 5.535 | 5.525 | 5.576 | 5.567 | 5.571 |
| 215 | 0.075 | 4.604 | 4.591 | 4.531 | 4.507 | 4.575 |
| 215 | 0.15 | 3.762 | 3.743 | 3.711 | 3.689 | 3.753 |
| 215 | 0.30 | 2.634 | 2.621 | 2.577 | 2.553 | 2.604 |
| 500 | 0 | 5.725 | 5.723 | 6.070 | 6.068 | 5.904 |
| 500 | 0.025 | 4.496 | 4.488 | 4.495 | 4.488 | 4.492 |
| 500 | 0.075 | 3.583 | 3.561 | 3.507 | 3.482 | 3.512 |
| 500 | 0.15 | 2.924 | 2.906 | 2.835 | 2.819 | 2.834 |
| 500 | 0.30 | 1.988 | 1.978 | 1.921 | 1.910 | 1.913 |
| [mm] | ||||||
|---|---|---|---|---|---|---|
| S10 | S11 | S12 | S13 | S14 | ||
| 40 | 0 | 7.811 | 7.410 | 7.425 | 7.688 | 7.629 |
| 40 | 0.075 | 6.882 | 6.455 | 6.551 | 6.686 | 6.623 |
| 40 | 0.15 | 5.757 | 5.381 | 5.504 | 5.584 | 5.532 |
| 40 | 0.30 | 4.007 | 3.739 | 3.828 | 3.894 | 3.854 |
| 93 | 0 | 7.276 | 7.015 | 6.921 | 7.184 | 7.150 |
| 93 | 0.075 | 5.629 | 5.375 | 5.396 | 5.408 | 5.373 |
| 93 | 0.15 | 4.733 | 4.515 | 4.545 | 4.521 | 4.493 |
| 93 | 0.30 | 3.232 | 3.071 | 3.107 | 3.087 | 3.065 |
| 215 | 0 | 6.239 | 6.098 | 5.883 | 6.227 | 6.215 |
| 215 | 0.025 | 5.718 | 5.525 | 5.469 | 5.530 | 5.504 |
| 215 | 0.075 | 4.774 | 4.623 | 4.604 | 4.531 | 4.502 |
| 215 | 0.15 | 3.926 | 3.810 | 3.797 | 3.715 | 3.703 |
| 215 | 0.30 | 2.759 | 2.666 | 2.667 | 2.586 | 2.577 |
| 500 | 0 | 6.004 | 5.965 | 5.647 | 6.031 | 6.020 |
| 500 | 0.025 | 4.654 | 4.527 | 4.457 | 4.448 | 4.433 |
| 500 | 0.075 | 3.744 | 3.677 | 3.633 | 3.502 | 3.494 |
| 500 | 0.15 | 3.077 | 3.029 | 3.004 | 2.855 | 2.851 |
| 500 | 0.30 | 2.103 | 2.066 | 2.051 | 1.951 | 1.949 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Marzec, I.; Bobiński, J. Quantitative Assessment of the Influence of Tensile Softening of Concrete in Beams under Bending by Numerical Simulations with XFEM and Cohesive Cracks. Materials 2022, 15, 626. https://doi.org/10.3390/ma15020626
Marzec I, Bobiński J. Quantitative Assessment of the Influence of Tensile Softening of Concrete in Beams under Bending by Numerical Simulations with XFEM and Cohesive Cracks. Materials. 2022; 15(2):626. https://doi.org/10.3390/ma15020626
Chicago/Turabian StyleMarzec, Ireneusz, and Jerzy Bobiński. 2022. "Quantitative Assessment of the Influence of Tensile Softening of Concrete in Beams under Bending by Numerical Simulations with XFEM and Cohesive Cracks" Materials 15, no. 2: 626. https://doi.org/10.3390/ma15020626
APA StyleMarzec, I., & Bobiński, J. (2022). Quantitative Assessment of the Influence of Tensile Softening of Concrete in Beams under Bending by Numerical Simulations with XFEM and Cohesive Cracks. Materials, 15(2), 626. https://doi.org/10.3390/ma15020626