


Comprehensive Analysis of a Tricycle Structure with a Steering System for Improvement of Driving Properties While Cornering




Abstract
:1. Introduction
2. Problem Statement
3. Materials and Methods
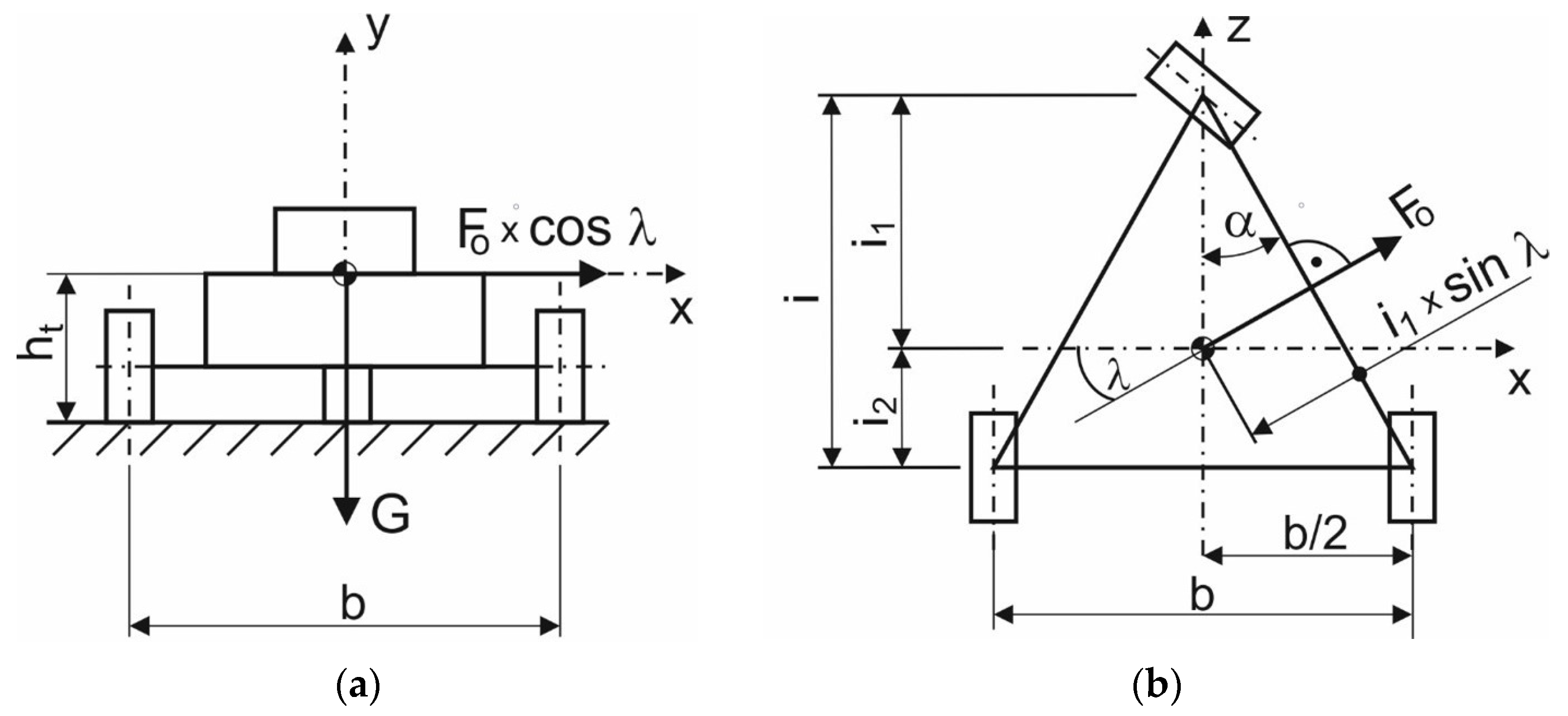
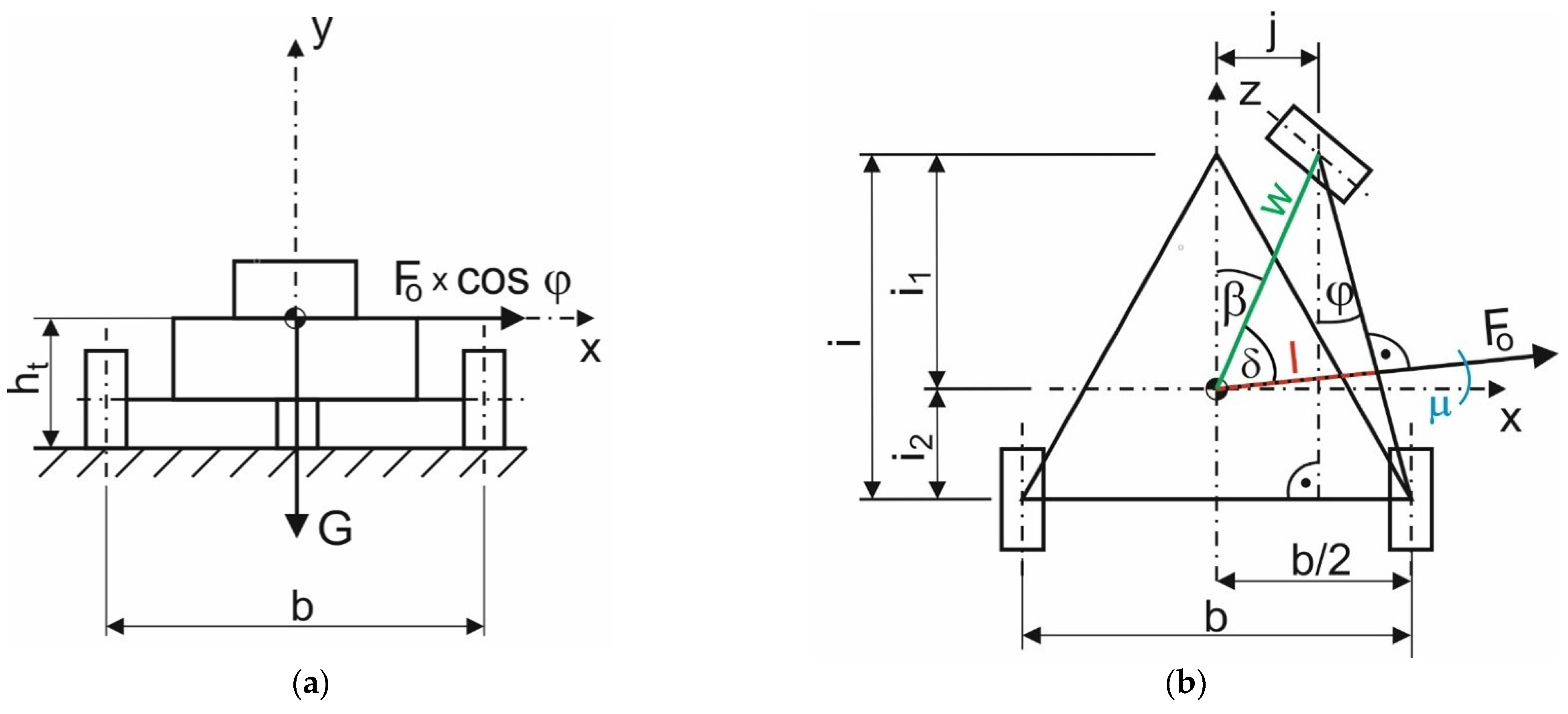
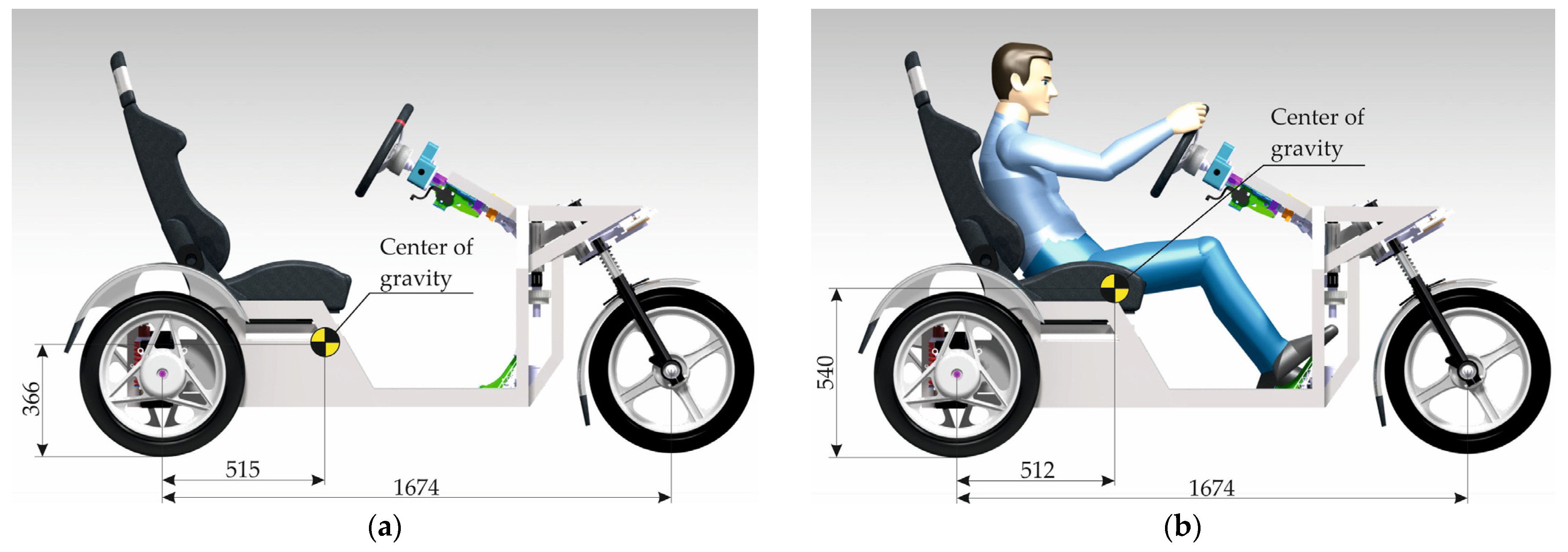
3.1. Mathematical Model of the Stability of a Conventional Vehicle and the E3-Cycle
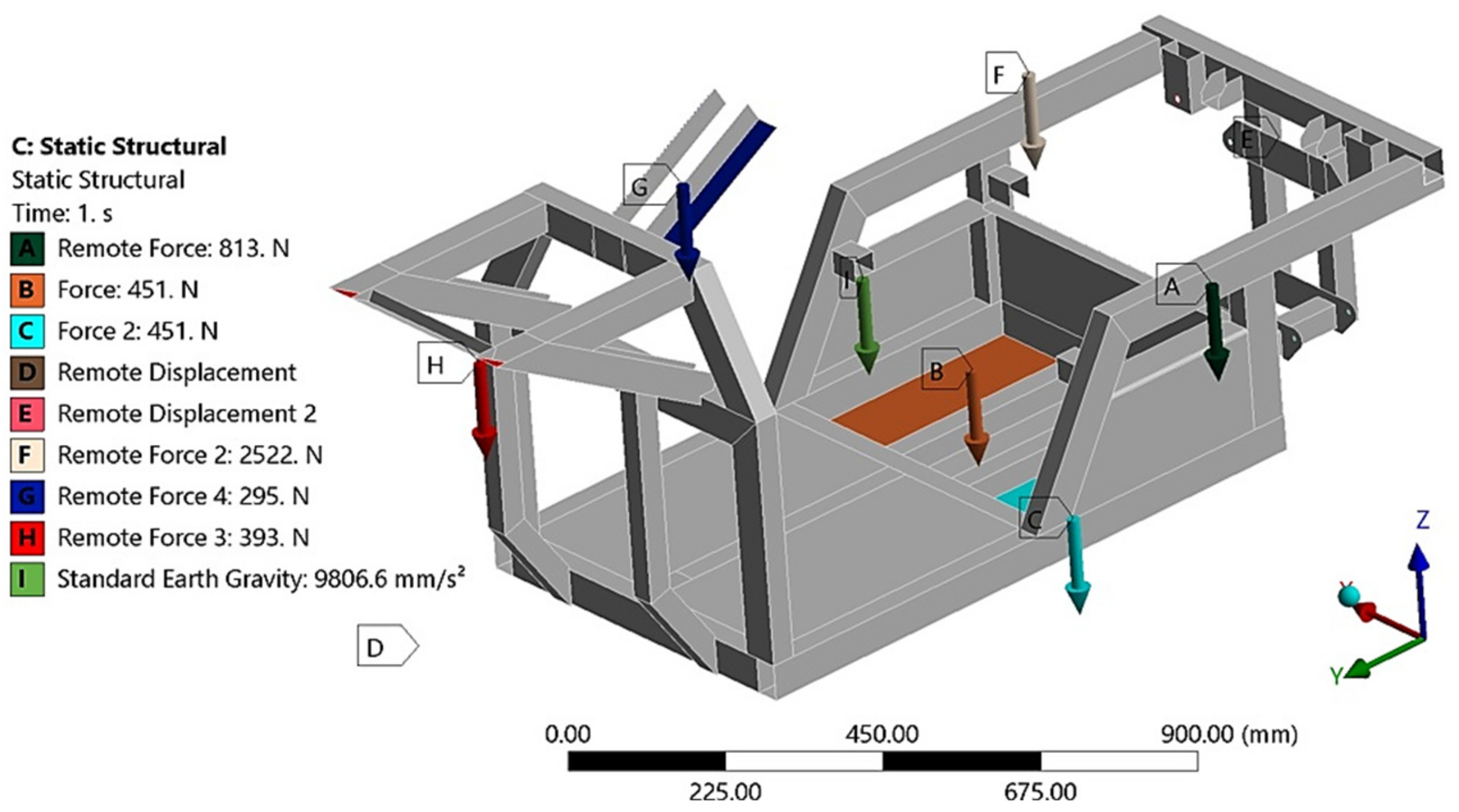
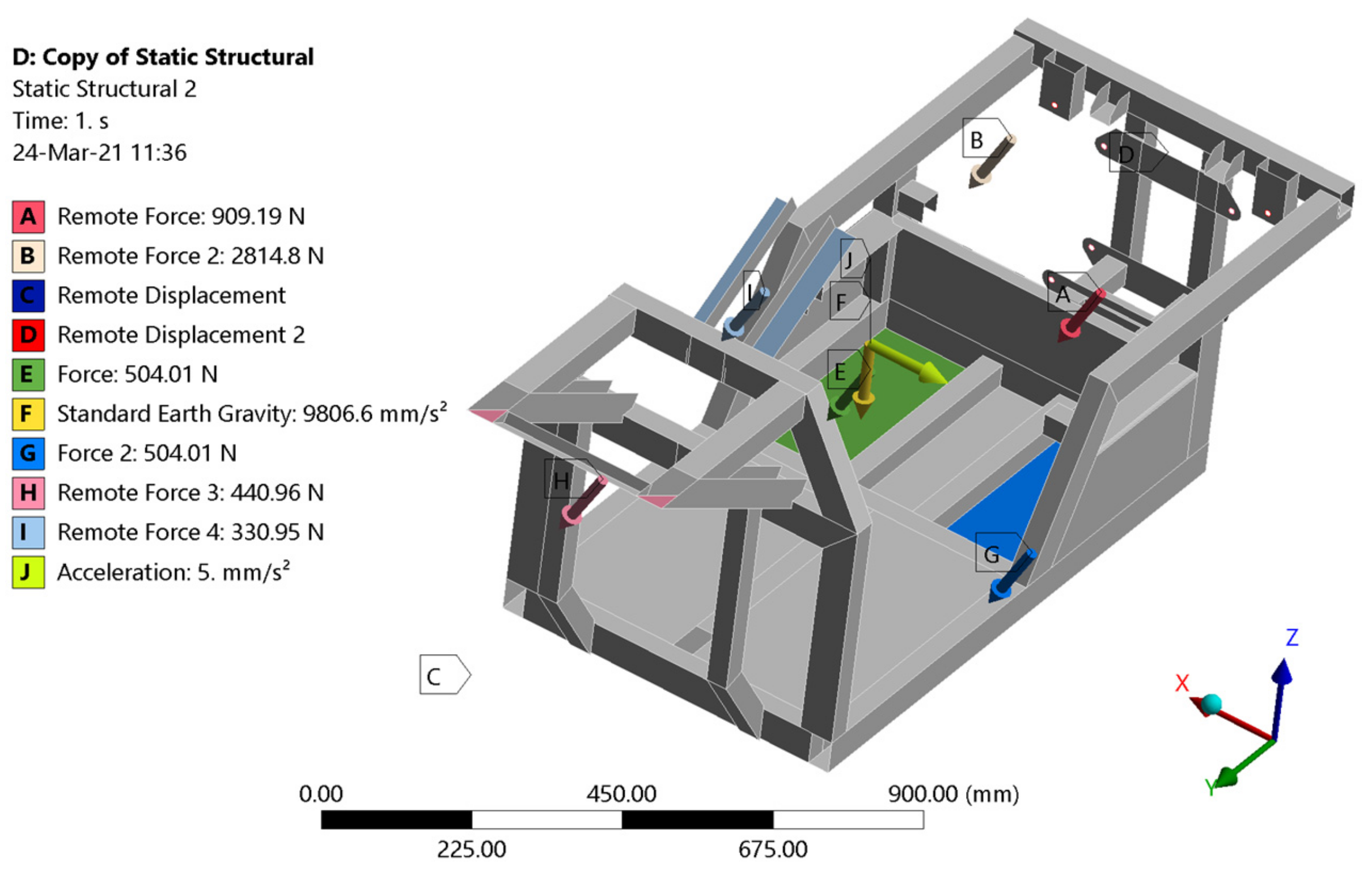
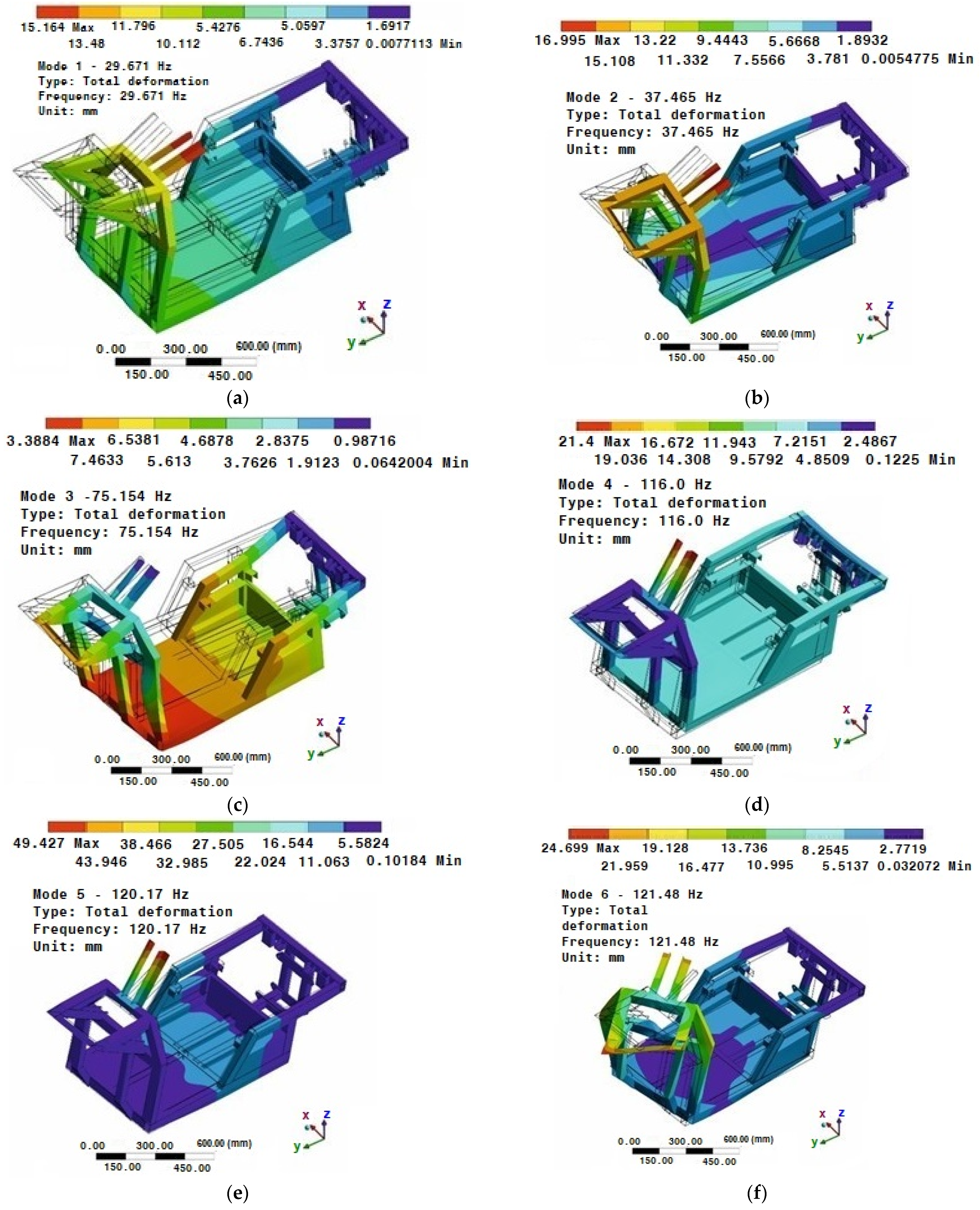
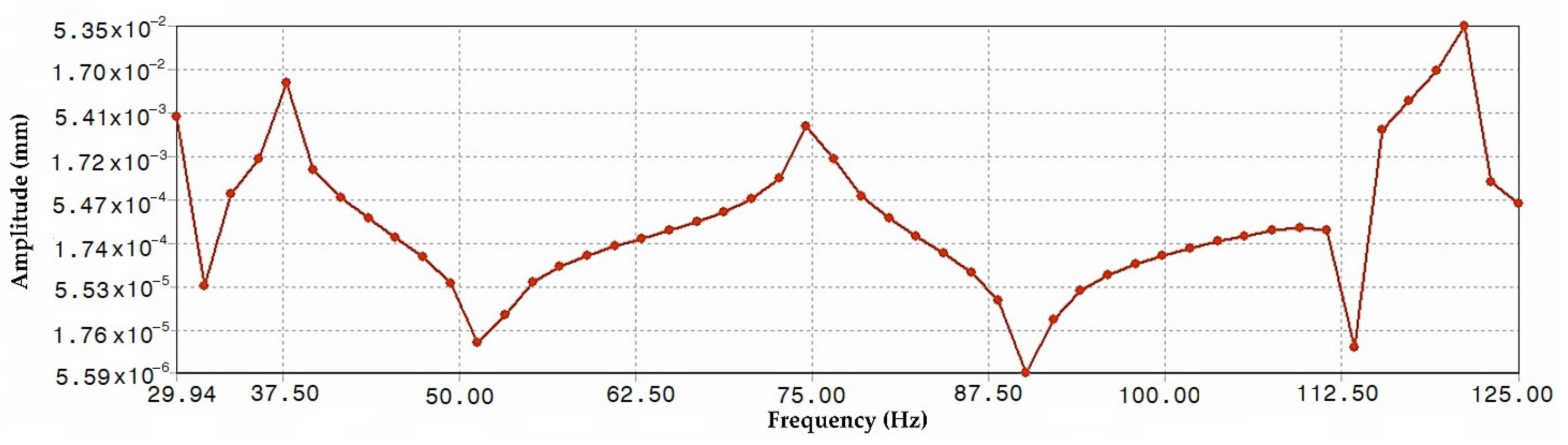
3.2. Numerical Simulation of Eigenfrequencies and Stresses of the E3-Cycle Frame
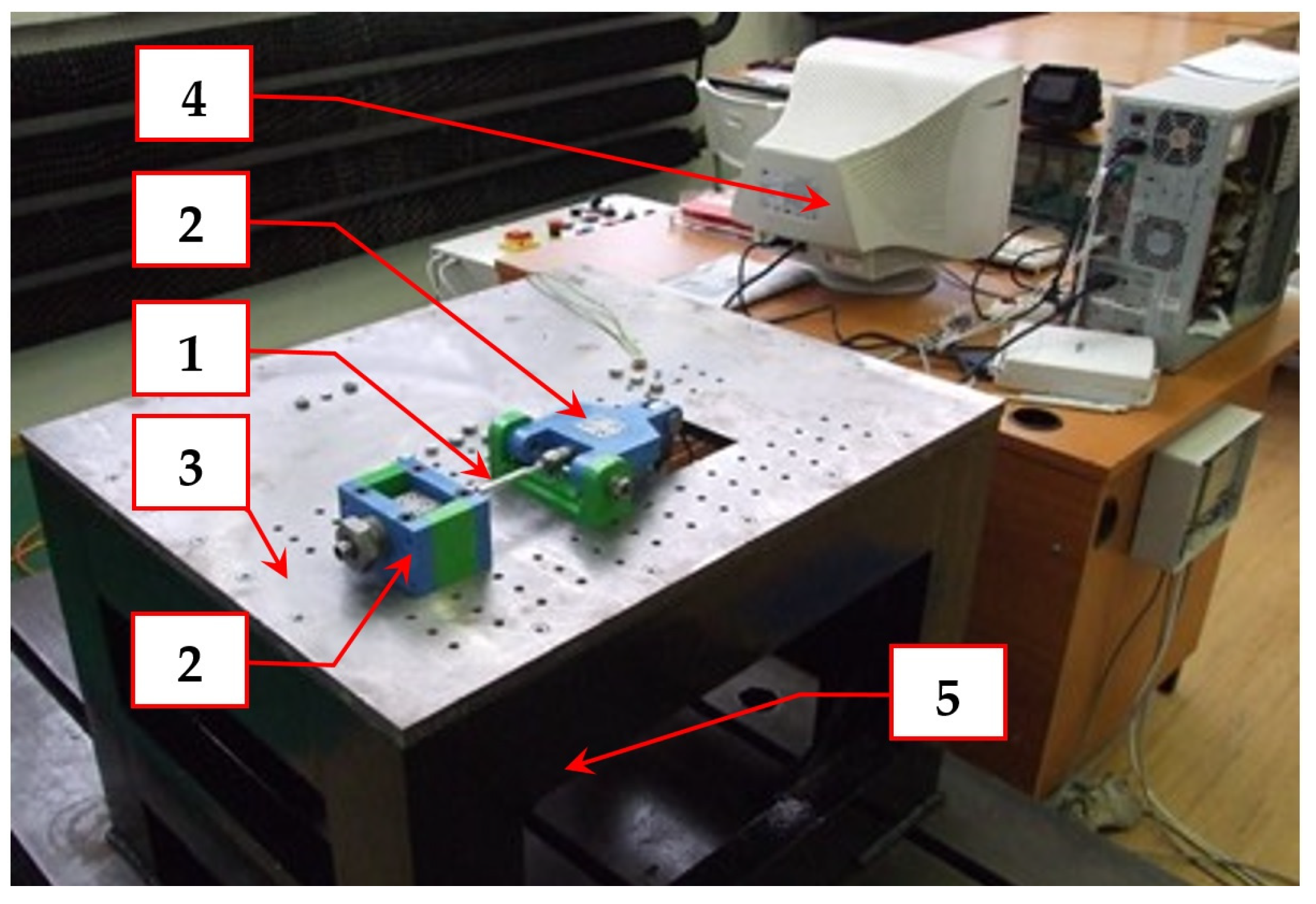
3.3. Measurement of the Multiaxial Fatigue Life of the Frame Material in a Flexure-Torsion Combination
4. Results
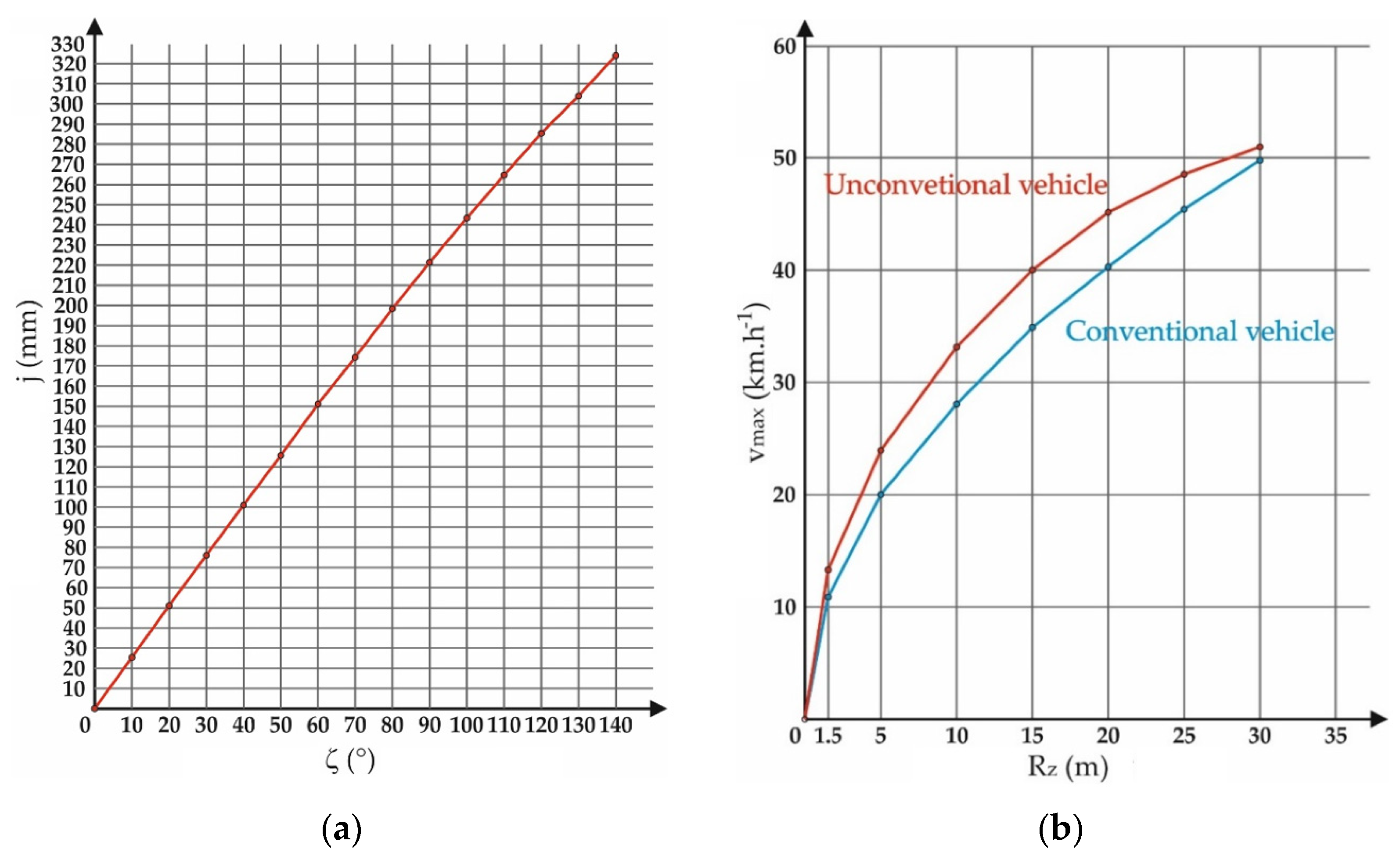
4.1. Theoretical Effect of Improving Vehicle Stability
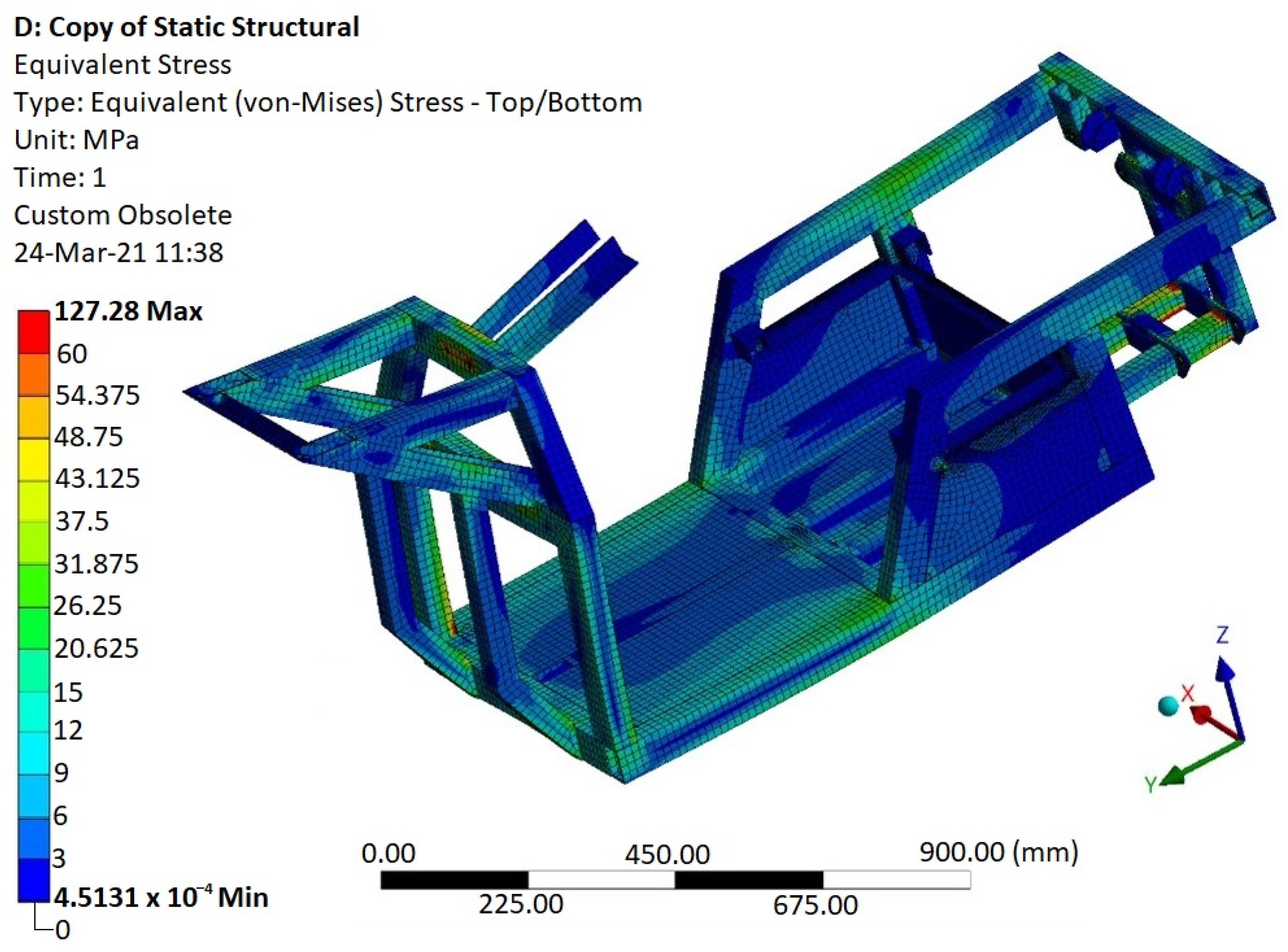
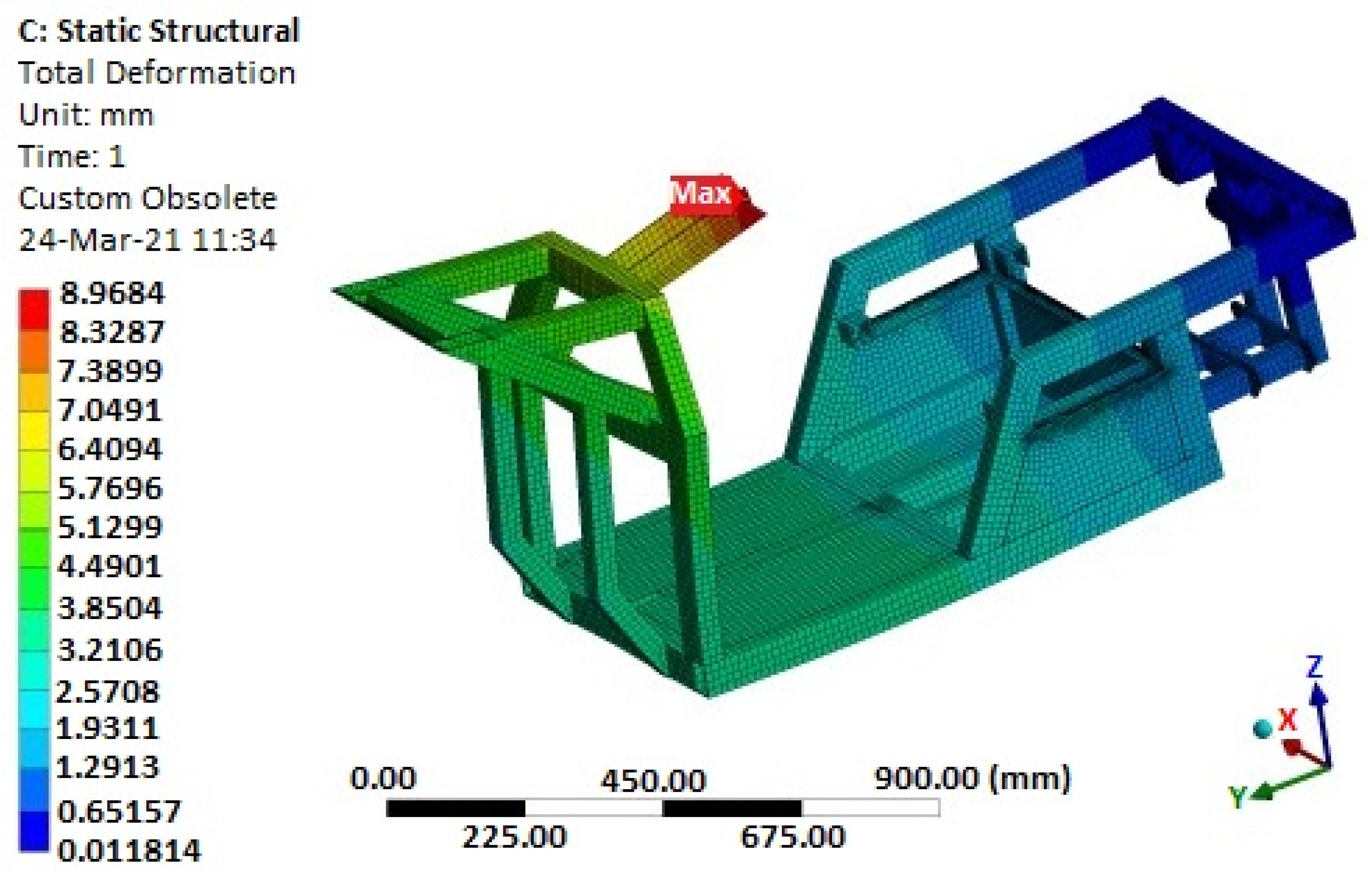
4.2. Results of the Research on the Load-Bearing Capacity of the E3-Cycle Frame
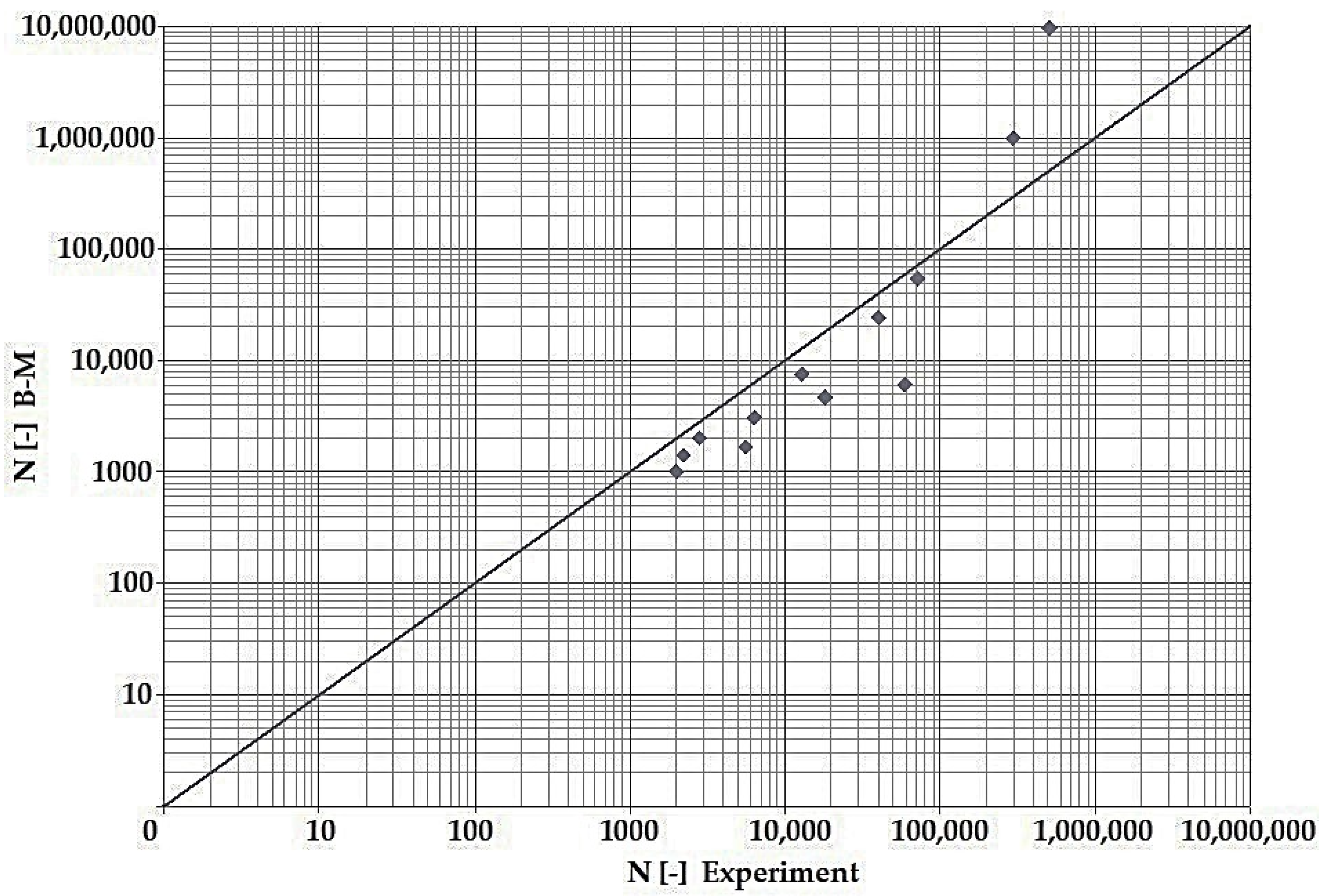
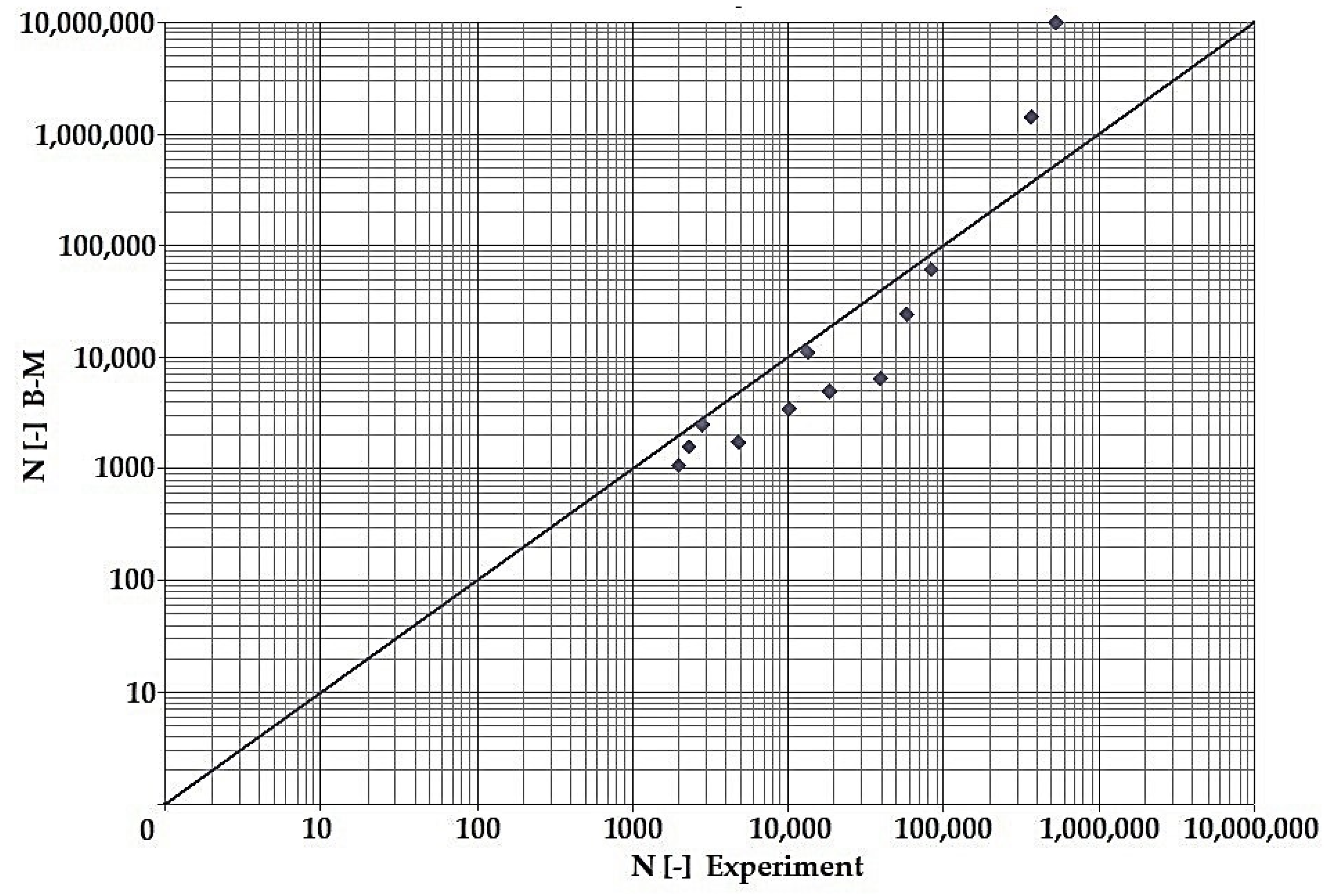
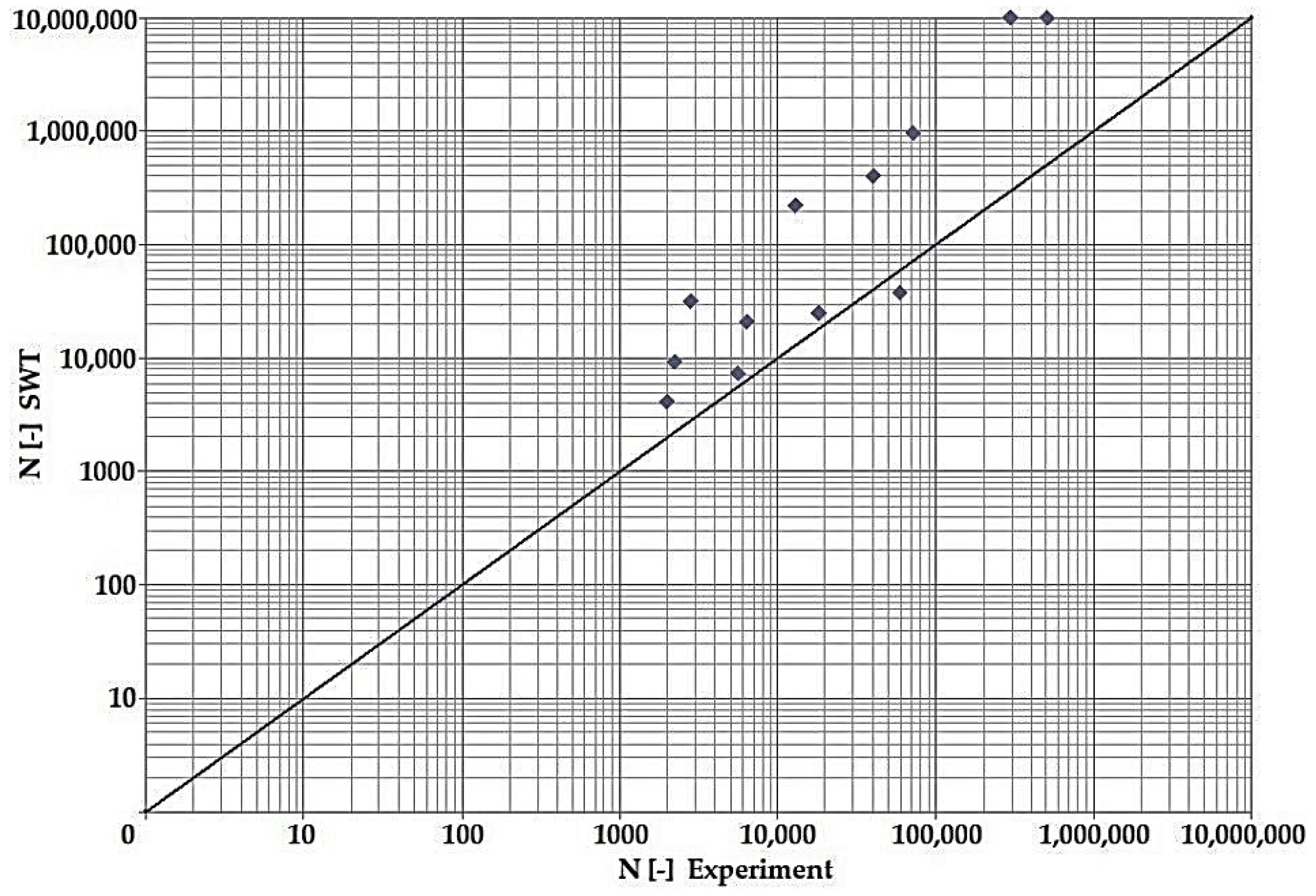
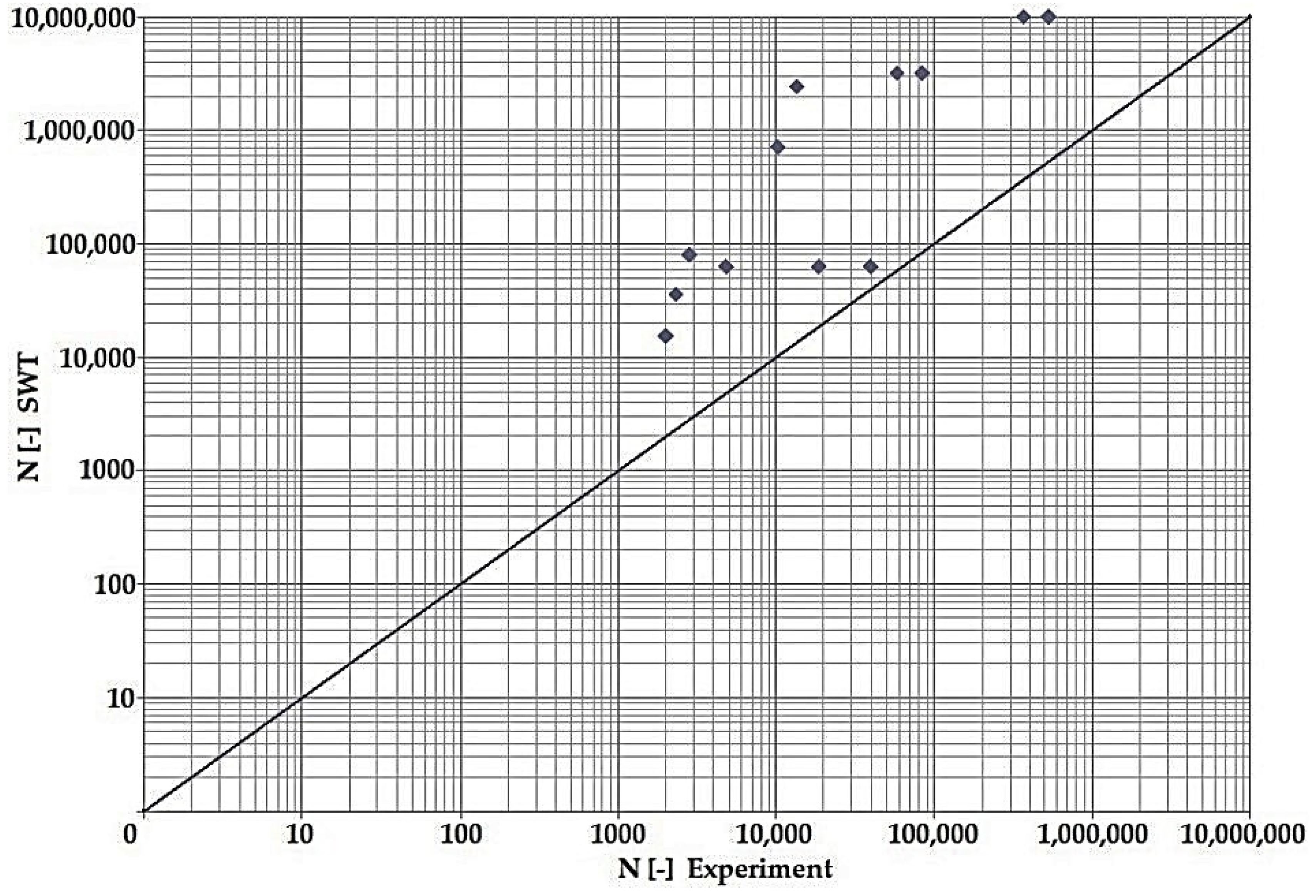
4.3. Results of the Research on the Fatigue Life of the Frame Material of the E3-Cycle
5. Discussion
6. Conclusions
- two further design modifications of the original steering mechanism;
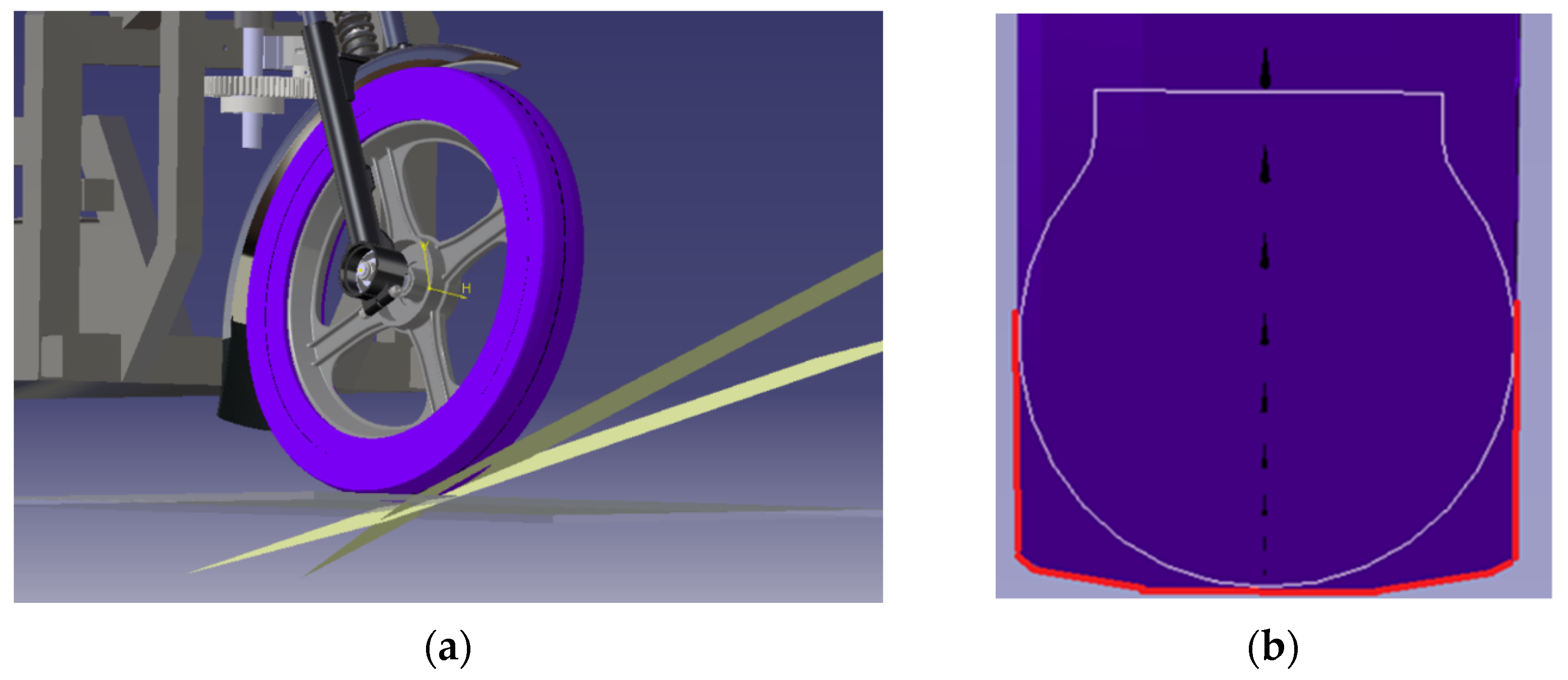
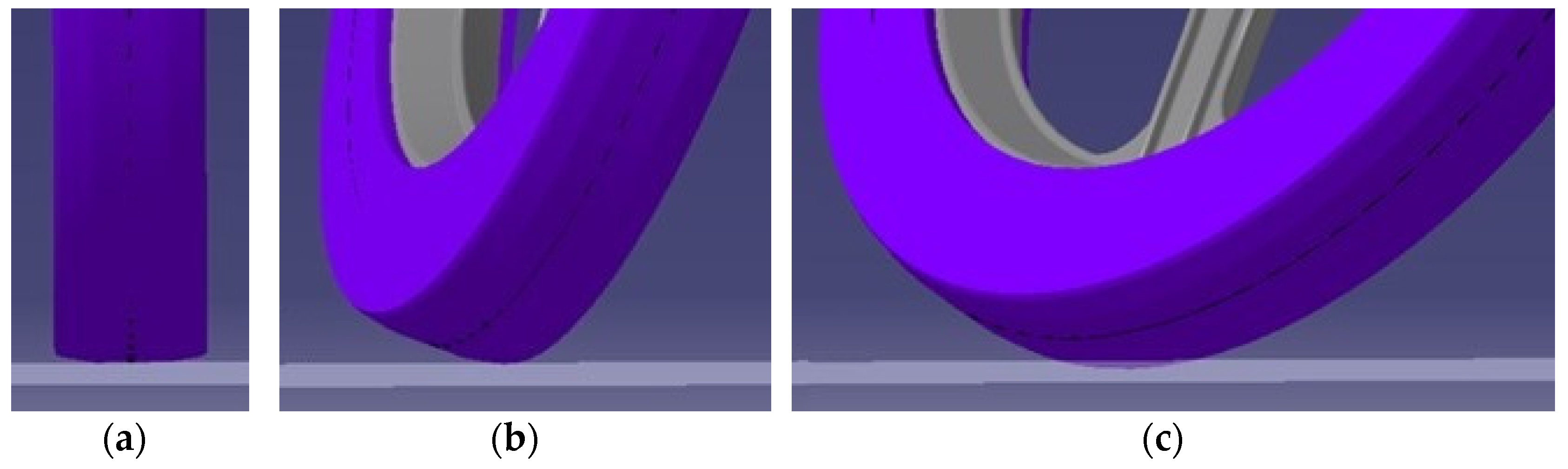
- a special design of the front steered wheel tire;
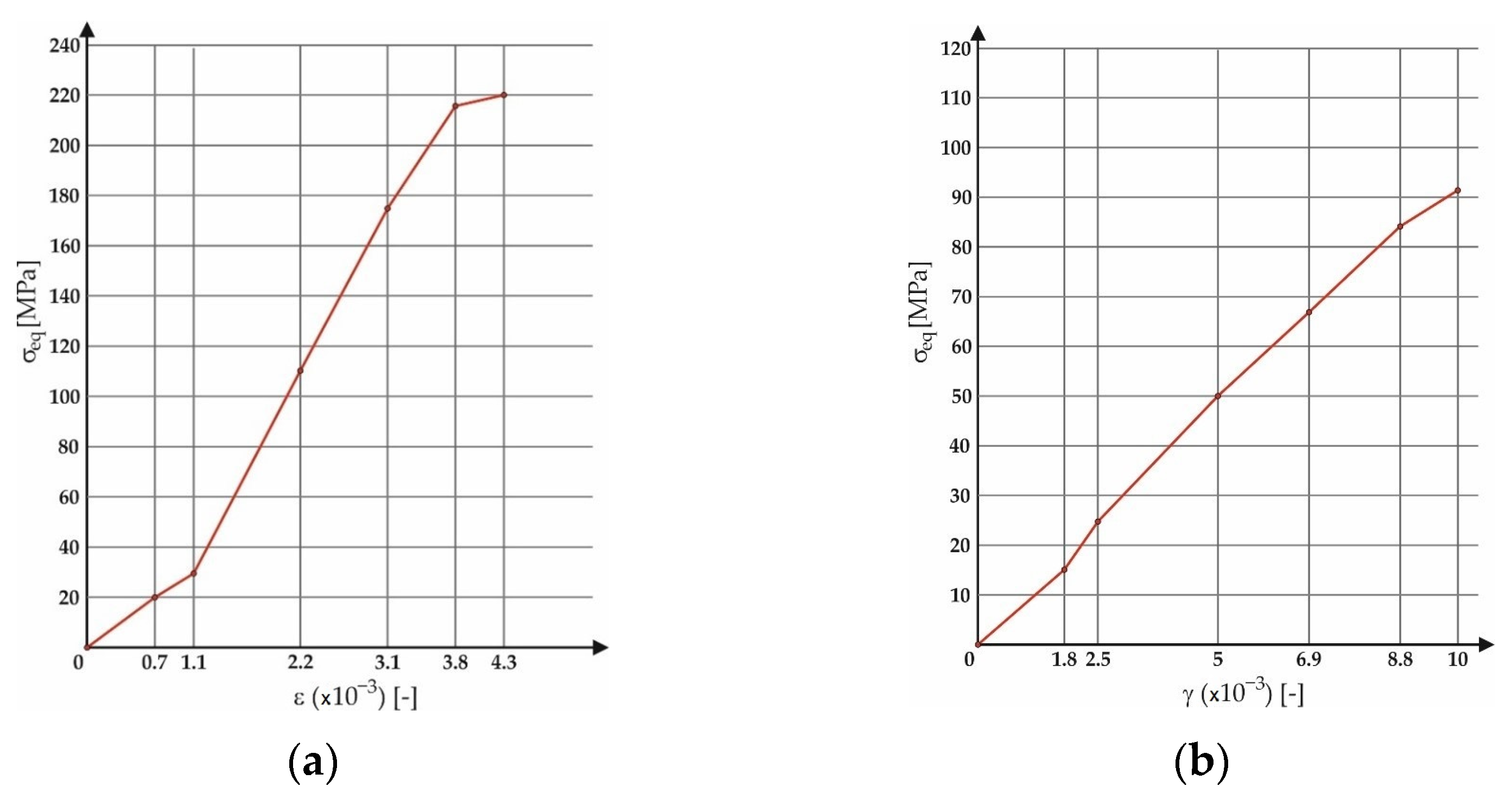
- a stress-strain calibration curve of the test equipment for the EN AW6063 material of the vehicle frame;
- a linear mathematical model of the addressed vehicle in the course of cornering;
- a methodology for testing the suitability of the vehicle frame for the unconventional steering mechanism.
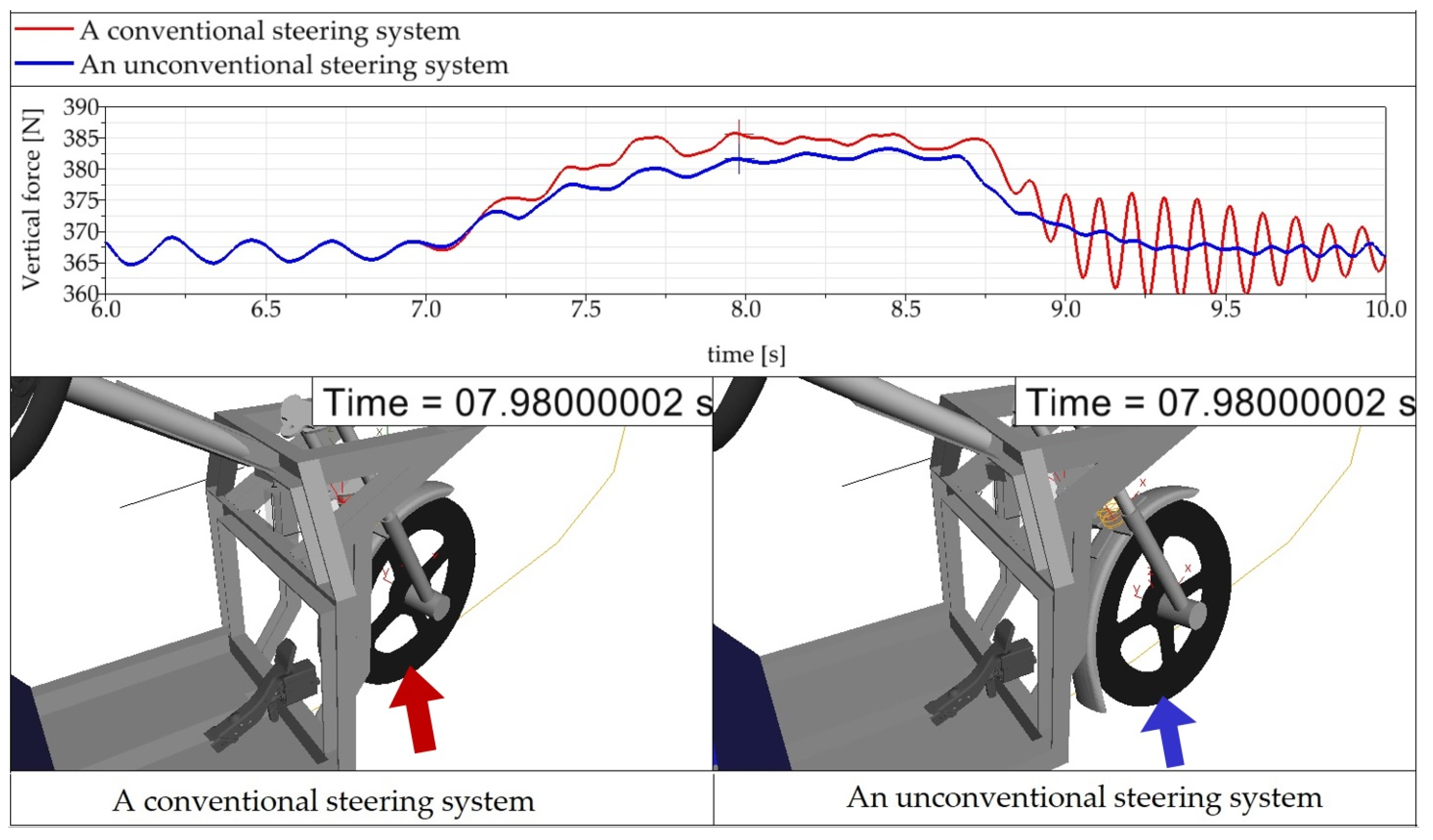
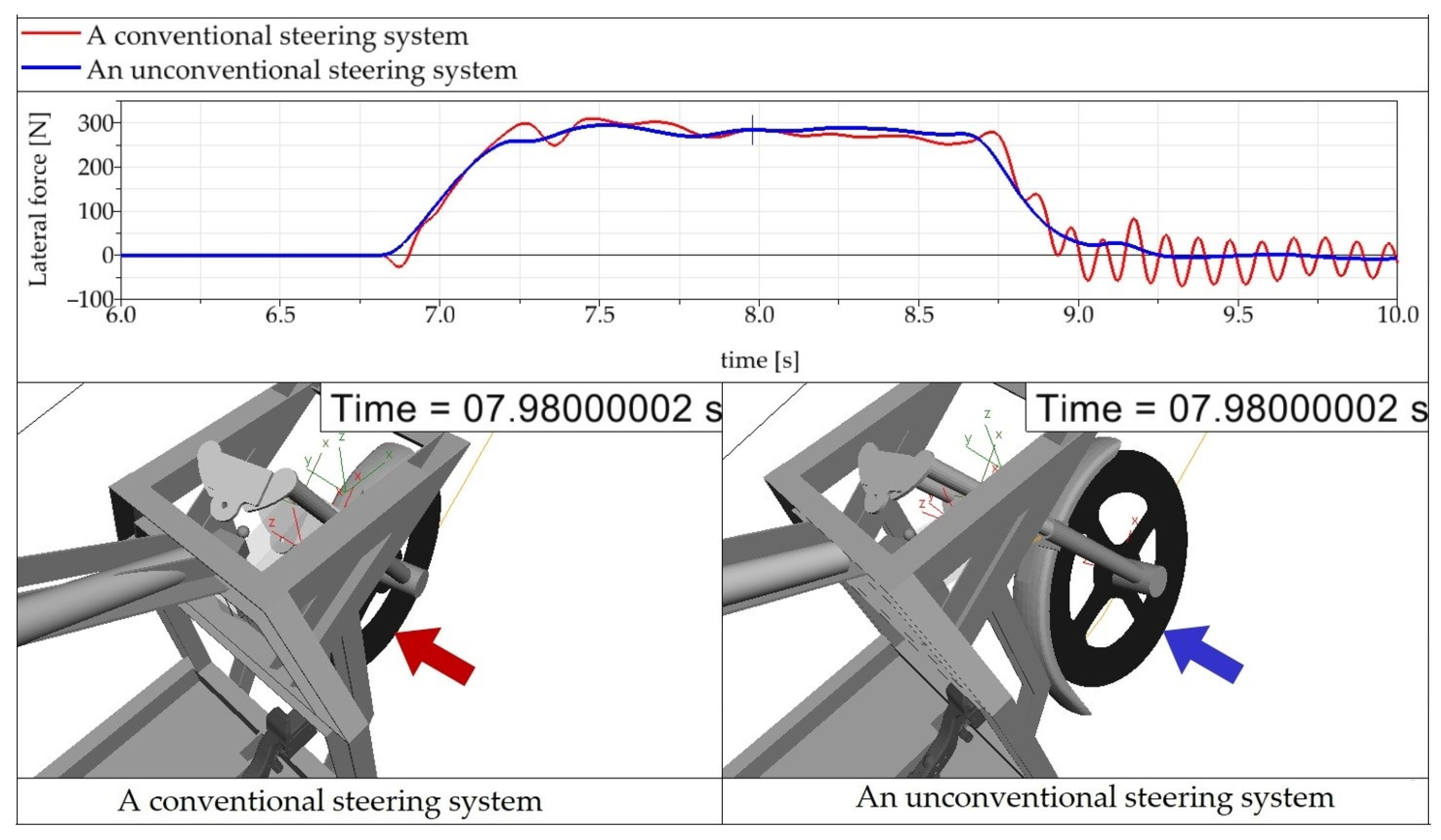
- the designed patented front wheel steering mechanism increased the passing speed by 19% in comparison with a conventional vehicle at the minimum possible radius of a corner;
- riding on the proposed vehicle has a positive effect on ride comfort and safety;
- the designed vehicle fulfills safety conditions in terms of frame integrity and load capacity;
- the vehicle frame is designed with respect to the fatigue life of the material; for this reason, it is serviceable;
- the authors enriched the stability, development, and durability of the frames of unconventional three-wheeled vehicles.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| 1F2R | Three-wheeled vehicle with one steered wheel in front and two wheels in the rear |
| 3D | Three-dimensional model |
| B–M | Fatigue criterion according to Brown and Miller |
| CAD | Computer-aided design |
| EU | European Union |
| FEA | Finite element analysis |
| FEM | Finite element method |
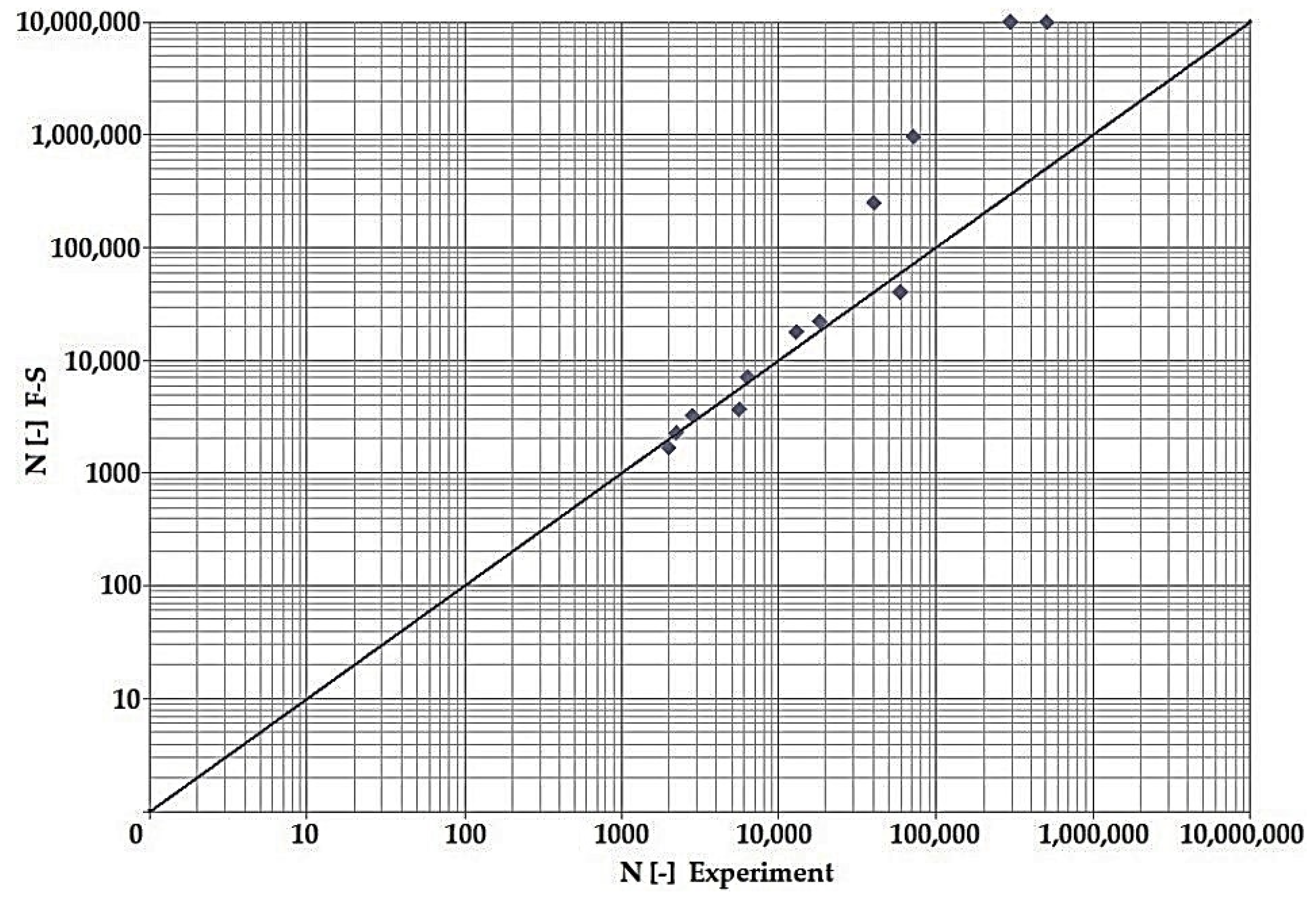
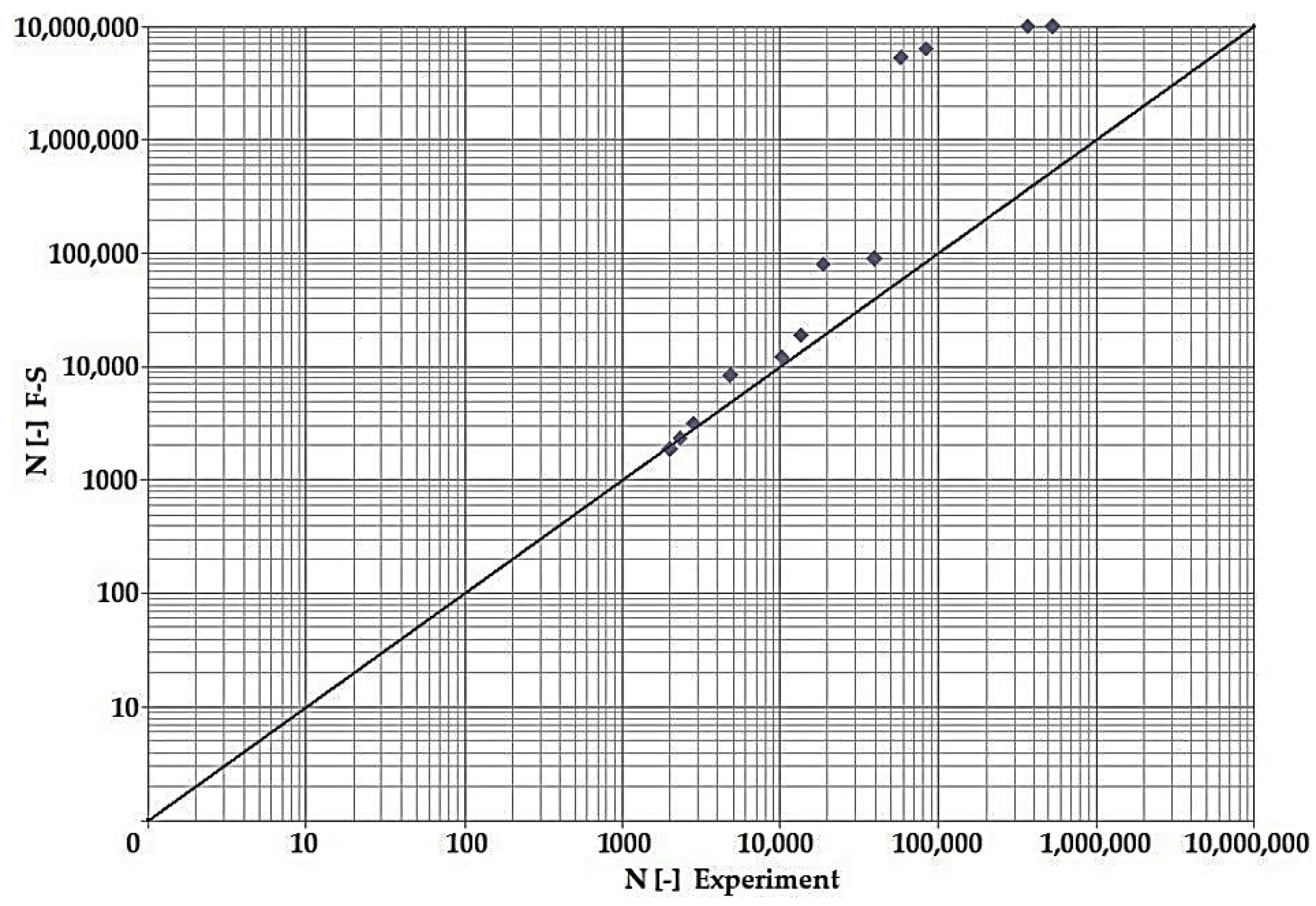
| F-S | Fatigue criterion Fatemi–Socie |
| Fo | Centrifugal force acting on the vehicle during cornering |
| G | Weight of the vehicle |
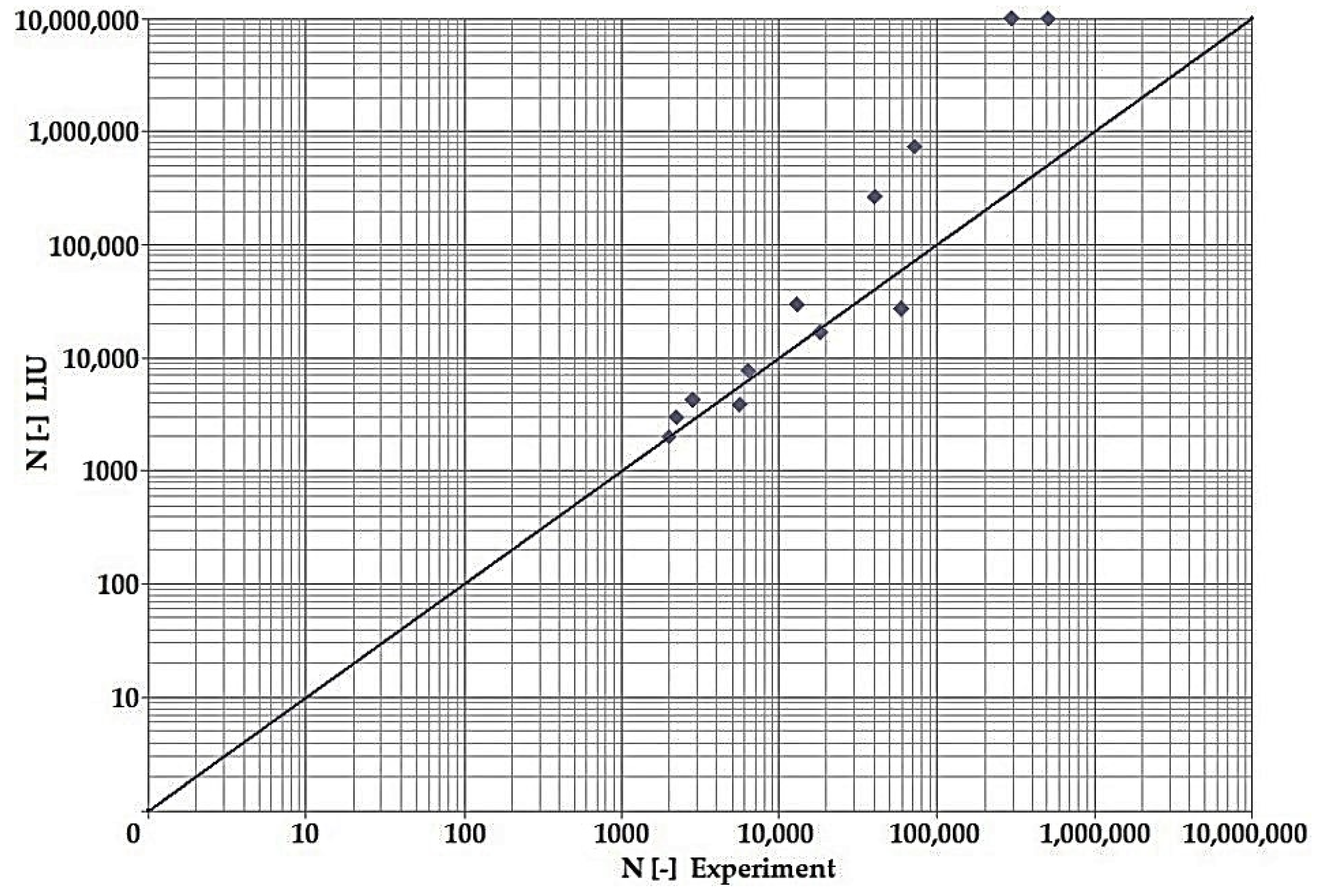
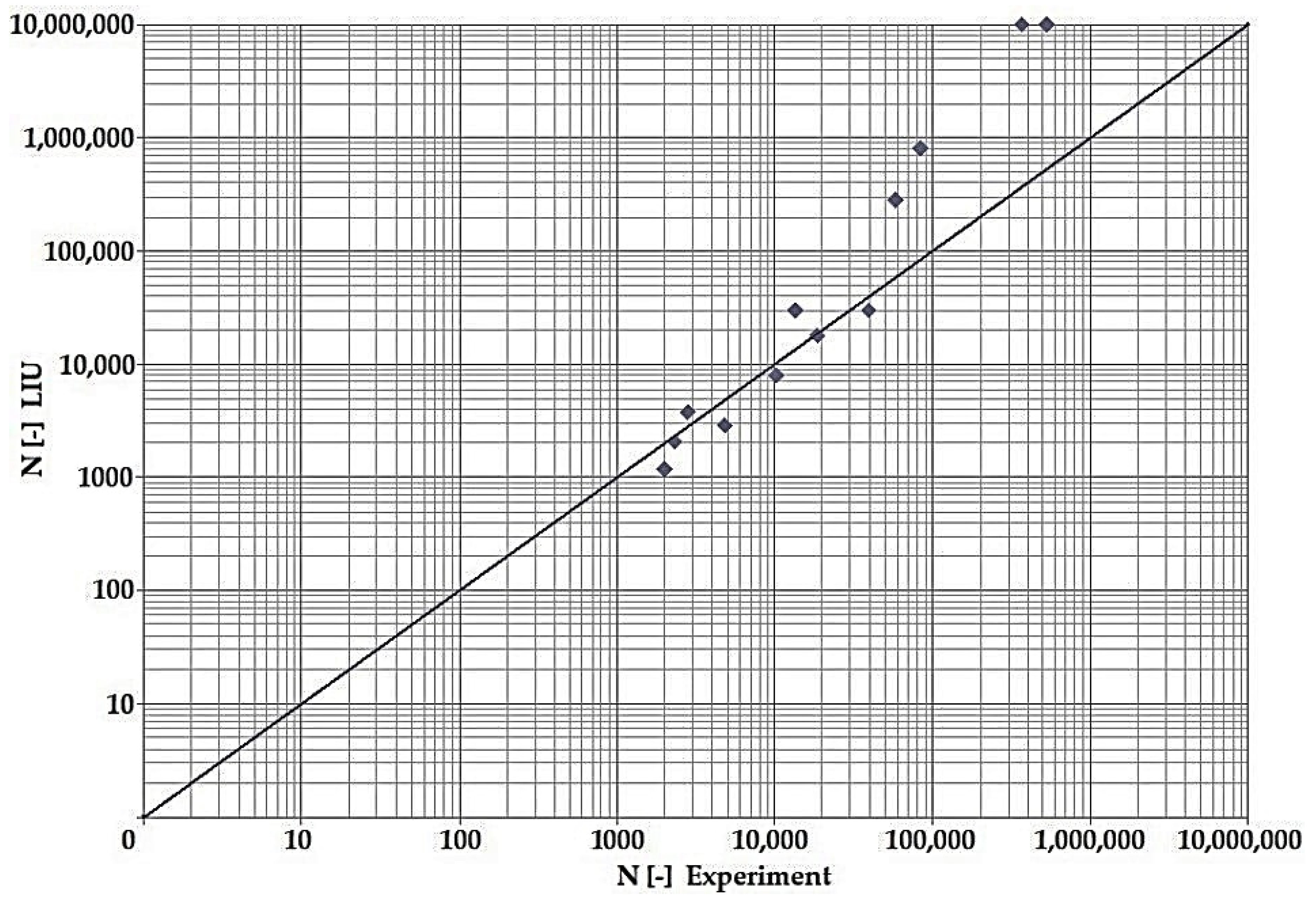
| LIU | Fatigue criterion according to Liu |
| MPa | MegaPascal |
| MBS | Multibody simulation |
| N | Number of cycles to fatigue fracture of the experimental specimens |
| Re | Yield strength of the frame material |
| Rm | Tensile strength of the frame material |
| Rz | Radius of a corner |
| SUV | Sport utility vehicle |
| SWT | Smith–Watson–Topper fatigue criterion |
| T | Centre of gravity of the vehicle |
| α | Constant angle given by the design of a conventional three-wheeled vehicle |
| β | Variable angle dependent upon the value of the wheel deflection j |
| γ | Total shear strain of the test specimen |
| δ | Variable angle dependent upon the value of the wheel deflection j |
| ε | Total normal strain of the test specimen |
| ζ | Steering wheel angle |
| λ | Constant angle given by the design of a conventional three-wheeled vehicle (equivalent to angle α) |
| μ | Variable angle dependent upon the value of the wheel deflection j (equivalent to the angle φ) |
| σeq | Equivalent stress of von Mises |
| φ | Variable angle dependent upon the value of the wheel deflection j |
| a | Acceleration of the vehicle |
| b | Track width of the vehicle |
| g | Gravitational acceleration |
| ht | Height of the vehicle’s center of gravity above the ground |
| i | Wheelbase of the vehicle |
| i1 | Distance of the vehicle’s center of gravity from the centerline of the front wheel |
| i2 | Distance of the vehicle’s center of gravity from the centerline of the rear wheel |
| j | Variable distance of the deflection of the front wheel of the vehicle from the longitudinal axis of symmetry |
| l | Geometric variable dependent upon the parameter w |
| m | Mass of the vehicle |
| v | Instantaneous speed of the vehicle |
| vmax | Maximum (safe) speed of the vehicle moving on the bend |
| x, y, z | Axes of the coordinate system |
| w | Variable dependent upon the value of the wheel deflection j |
References
- Slov-Lex Legislative and Information Portal. Decree of the Ministry of Transport and Construction of the Slovak Republic No. 134/2018. Available online: https://www.slov-lex.sk/pravne-predpisy/SK/ZZ/2018/134/ (accessed on 19 July 2022).
- Safety on Roads (In Slovak). Available online: https://www.slovensko.sk/sk/agendy/agenda/_bezpecnost-na-cestach (accessed on 19 July 2022).
- Ijaz, M.; Lan, L.; Zahid, M.; Jamal, A. A comparative study of machine learning classifiers for injury severity prediction of crashes involving three-wheeled motorized rickshaw. Accid. Anal. Prev. 2021, 154, 106094. [Google Scholar] [CrossRef] [PubMed]
- World Health Organization. World Health Organization Global Status Report on Road Safety. Available online: https://www.who.int/publications/i/item/global-status-report-on-road-safety-2018 (accessed on 22 July 2022).
- Initiatives to Address the Mitigation of Vehicle Rollover, National Highway Traffic Safety Administration. Available online: http://www.yasa.org/upload/uploadedfiles/IPTRolloverMitigationReport.pdf (accessed on 22 July 2022).
- Chen, C.F. Personality, safety attitudes and risky driving behaviors—Evidence from young Taiwanese motorcyclists. Accid. Anal. Prev. 2009, 41, 963–968. [Google Scholar] [CrossRef] [PubMed]
- Van Valkenburgh, P.G.; Klein, R.H.; Kanianthra, J. Three-Wheel Passenger Vehicle Stability and Handling; SAE Technical Paper Series; SAE International: Detroit, MI, USA, 1982. [Google Scholar]
- Gawade, T.R.; Mukherjee, S.; Mohan, D. Rollover Propensity of Three-Wheel Scooter Taxis; SAE Technical Paper Series; SAE International: Detroit, MI, USA, 2004. [Google Scholar]
- Garrott, W.R.; Howe, J.G.; Forkenbrock, G.J. Results from NHTSA’s Experimental Examination of Selected Maneuvers That May Induce on-Road, Untripped, Light Vehicle Rollover; SAE Technical Paper Series; SAE International: Detroit, MI, USA, 2001. [Google Scholar]
- Blatnický, M.; Sága, M.; Dižo, J.; Brůna, M. Application of light metal alloy EN AW 6063 to vehicle frame construction with an innovated steering mechanism. Materials 2020, 13, 817. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dobrodenka, P.; Dobrodenka, A.; Gerlici, J.; Lack, T.; Blatnický, M.; Harušinec, J.; Dižo, J.; Kurčík, P.; Suchánek, A.; Strážovec, P. A Suspension of a Front Wheel of a Three-Track Vehicle; Utility model No. 8603; Industrial Property Office of the Slovak Republic: Banská Bystrica, Slovakia, 2019. (In Slovak) [Google Scholar]
- Sága, M.; Blatnický, M.; Vaško, M.; Dižo, J.; Kopas, P.; Gerlici, J. Experimental determination of the Manson-Coffin curves for an original unconventional vehicle frame. Materials 2020, 13, 4675. [Google Scholar] [CrossRef] [PubMed]
- Dere, A.A.; Singh, M.; Thakan, A.; Kumar, R.; Singh, H. Design optimization of go-kart chassis frame using modal analysis. In Advances in Metrology and Measurement of Engineering Surfaces: Select Proceedings of ICFMMP 2019, 1st ed.; Prakash, C., Krolczyk, G., Singh, S., Pramanik, A., Eds.; Springer: Singapore, 2021; pp. 171–186. [Google Scholar]
- Patil, R.V.; Lande, P.R.; Reddy, Y.P.; Sahasrabudhe, A.V. Optimization of three-wheeler chassis by linear static analysis. Mater. Today Proc 2017, 4, 8806–8815. [Google Scholar] [CrossRef]
- Jeyapandiarajan, P.; Kalaiarassan, G.; Joel, J.; Shirbhate, R.; Telare, F.T.; Bhagat, A. Design and analysis of chassis for an electric motorcycle. Mater. Today Proc. 2018, 5, 13563–13573. [Google Scholar] [CrossRef]
- Blatnický, M.; Dižo, J.; Sága, M.; Brůna, M.; Vaško, M. Experimental research on Manson-Coffin curves for the frame material of an unconventional vehicle. Materials 2022, 15, 1768. [Google Scholar] [CrossRef] [PubMed]
- Safaei, B.; Onyibo, E.C.; Hurdoganoglu, D. Effect of static and harmonic loading on the honeycomb sandwich beam by using finite element method. Facta Univ. Ser. Mech. Eng. 2022, 20, 279–306. [Google Scholar] [CrossRef]
- Balokhonov, R.; Romanova, V.; Schwab, E.; Zemlianov, A.; Evtushenko, E. Computational microstructure-based analysis of residual stress evolution in metal-matrix composite materials during thermomechanical loading. Facta Univ. Ser. Mech. Eng. 2021, 19, 241–252. [Google Scholar] [CrossRef]
- Schrek, A.; Brusilová, A.; Švec, P.; Gábrišová, Z.; Moravec, J. Analysis of the drawing processes of small-sized seam tubes. Metals 2020, 10, 709. [Google Scholar] [CrossRef]
- Palanivendhan, M.; Devanand, S.; Chandradass, J.; Philip, J.; Sajith Reddy, S. Design and analysis of 3-wheeler chassis. Mater. Today Proc. 2021, 45, 6958–6968. [Google Scholar] [CrossRef]
- Hambissa, D.; Nallamothu, R.B.; Andrge, T. Analysis of three-wheeler vehicle structure at the event of side pole crash. J. Eng. 2022, 2022, 5490585. [Google Scholar] [CrossRef]
- Lin, C.-S.; Yu, C.-C.; Ciou, Y.-H.; Wu, Y.-X.; Hsu, C.-H.; Li, Y.-T. Design and analysis of a light electric vehicle. Mech. Sci. 2021, 12, 345–360. [Google Scholar] [CrossRef]
- Leitner, B. Autoregressive models in modelling and simulation of transport means working conditions. Proceedings of 14th International Conference on Transport Means, Kaunas, Lithuania, 21–22 October 2010; pp. 21–24. [Google Scholar]
- Lovska, A.; Fomin, O.; Horban, A.; Radkevych, V.; Skok, P.; Skliarenko, I. Investigation of the dynamic loading of a body of passenger cars during transportation by rail ferry. EUREKA Phys. Eng. 2019, 2019, 91–100. [Google Scholar] [CrossRef] [Green Version]
- Fomin, O.; Gerlici, J.; Lovska, A.; Gorbunov, M.; Kravchenko, K.; Prokopenko, P.; Hauser, V. The improved hatch cover construction for universal open box-type wagon from the strength and durability point of view. Manuf. Technol. 2019, 19, 216–221. [Google Scholar] [CrossRef]
- Xiu, R.; Spiryagin, M.; Wu, Q.; Yang, S.; Liu, Y. Fatigue life prediction for locomotive bogie frames using virtual prototype technique. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2021, 235, 1122–1131. [Google Scholar] [CrossRef]
- Chawla, V.; Bhargava, P.; Verma, S. Design, stimulation and fabrication of chassis of an FSAE female driven vehicle. Mater. Today Proc. 2021, 43, 36–41. [Google Scholar] [CrossRef]
- Martyanov, A.S.; Shepelev, V.D.; Mavrin, V.G. Electric vehicle chassis simulation model in MATLAB/Simulink. In Proceedings of the International Science and Technology Conference “Earth Science”, Vladivostok, Russia, 8–10 December 2020. [Google Scholar]
- Gabajová, G.; Furmannová, B.; Medvecká, I.; Grznár, P.; Krajčovič, M.; Furmann, R. Virtual training application by use of augmented and virtual reality under university technology enhanced learning in Slovakia. Sustainability 2019, 11, 6677. [Google Scholar] [CrossRef] [Green Version]
- Stanojković, J.; Radovanović, M. Influence of the cutting parameters on force, moment and surface roughness in the end milling of aluminium 6082-T6. Facta Univ. Ser. Mech. Eng. 2022, 20, 157–165. [Google Scholar]
- Pastirčák, R.; Ščury, J.; Moravec, J. The effects of pressure during the crystallization on properties of the alsi12 alloy. Arch. Foundry Eng. 2017, 17, 103–106. [Google Scholar] [CrossRef] [Green Version]
- Sága, M.; Blatnická, M.; Blatnický, M.; Dižo, J.; Gerlici, J. Research of the fatigue life of welded joints of high strength steel S960 QL created using laser and electron beams. Materials 2020, 13, 2539. [Google Scholar] [CrossRef] [PubMed]
- Blatnický, M.; Dižo, J.; Sága, M.; Kopas, P. Applied research of applicability of high-strength steel for a track of demining machine in term of its tribological properties. Metals 2021, 11, 505. [Google Scholar] [CrossRef]
- Mukherjee, S.; Mohan, D.; Gawade, T.R. Three-wheeled scooter taxi: A safety analysis. Sadhana—Acad. Proc. Eng. Sci. 2007, 32, 459–478. [Google Scholar] [CrossRef] [Green Version]
- eFatigue: Fatigue Analysis on the Web. Available online: https://www.efatigue.com/ (accessed on 1 October 2021).
- Linghu, K.Z.; Xiao, B.; Zhang, D.; Li, X.; Wang, Z. Shape optimization of passenger vehicle wheel on fatigue failure. In Proceedings of the 4th Annual International Workshop on Materials Science and Engineering (IWMSE2018), Xi’an, China, 18–20 May 2018. [Google Scholar]
- Zhou, J.; Huang, H.-Z.; Li, H. A Novel energy-critical multiaxial fatigue life prediction for low cycle fatigue under mixed-mode loading. Metals 2018, 8, 1066. [Google Scholar] [CrossRef] [Green Version]
- Karolczuk, A.; Skibicki, D.; Pejkowski, L. Evaluation of the Fatemi-Socie damage parameter for the fatigue life calculation with application of the Chaboche plasticity model. Fatigue Fract. Eng. Mater. Struct. 2019, 42, 197–208. [Google Scholar] [CrossRef] [Green Version]
- Grznár, P.; Krajčovič, M.; Gola, A.; Dulina, Ľ.; Fumannová, B.; Mozol, Š.; Plinta, D.; Burganová, N.; Danilczuk, W.; Svitek, R. The use of a generic algorithm for sorting warehouse optimisation. Processes 2021, 9, 1197. [Google Scholar] [CrossRef]
- Kluger, K.; Łagoda, T. New energy model for fatigue life determination under multiaxial loading with different mean values. Int. J. Fatigue 2014, 66, 229–245. [Google Scholar] [CrossRef]
- Dizo, J.; Barta, D.; Blatnicky, M. Improvement driving stability of electric tricycle. In Proceedings of the 17th International Scientific Conference Engineering for Rural Development, Jelgava, Latvia, 23–25 May 2018. [Google Scholar]
- Spânu, A.; Stoenescu, F.; Lorenzi, M.; Avram, M. Analysis of three wheeled electric vehicle with increased stability on the road. In Proceedings of the 8th International Conference on Advanced Concepts in Mechanical Engineering, Iasi, Romania, 7–8 June 2018. [Google Scholar]
- Sindha, J.; Chakraborty, B.; Chakravarty, D. Rigid body modeling of three wheel vehicle to determine the dynamic stability—A practical approach. In Proceedings of the IEEE International Transportation Electrification Conference (ITEC), Chennai, India, 27–29 August 2015. [Google Scholar]
- Azim, R.A.; Malik, F.M.; Syed, W.U.H. Rollover Mitigation Controller Development for Three-Wheeled Vehicle Using Active Front Steering. Math. Probl. Eng. 2015, 2015, 918429. [Google Scholar] [CrossRef]
- Kidane, S.; Rajamani, R.; Alexander, L.; Starr, P.J.; Donath, M. Development and experimental evaluation of a tilt stability control system for narrow commuter vehicles. IEEE Trans. Control. Syst. Technol. 2010, 18, 1266–1279. [Google Scholar] [CrossRef]
- Barker, M.; Drew, B.; Darling, J.; Edge, K.A.; Owen, G.W. Steady-state steering of a tilting three-wheeled vehicle. Veh. Syst. Dyn. 2010, 48, 815–830. [Google Scholar] [CrossRef]
- UV 3984, SK. Available online: https://wbr.indprop.gov.sk/WebRegistre/UzitkovyVzor/?lang=en (accessed on 15 August 2022).
- Rodriguez-Licea, M.A. On the tripped rollovers and lateral skid in three-wheeled vehicles and their mitigation. Vehicles 2021, 3, 357–376. [Google Scholar] [CrossRef]
- Junbo, J.; Anders, U. Modal Testing and Finite Element Calculations for Lightweight Aluminum Panels in Car Carriers. Mar. Technol. SNAME News 2006, 43, 11–21. [Google Scholar]
- Chen, W.; Zuo, W. Component sensitivity analysis of conceptual vehicle body for lightweight design under static and dynamic stiffness demands. Int. J. Veh. Des. 2014, 66, 107–123. [Google Scholar] [CrossRef]
- Kim, J.-S.; Kim, N.-P. A study on strength evaluation procedure for the welded bogie frame of tilting railway vehicles. Int. J. Veh. Des. 2007, 43, 31–48. [Google Scholar] [CrossRef]
- Wang, B.J.; Li, Q.; Ren, Z.S.; Sun, S.G. Improving the fatigue reliability of metro vehicle bogie frame based on load spectrum. Int. J. Fatigue 2020, 132, 105389. [Google Scholar] [CrossRef]
- Wang, Q.; Zhou, J.; Gong, D.; Wang, T.; Chen, J.; You, T.; Zhang, Z. The influence of the motor traction vibration on fatigue life of the bogie frame of the metro vehicle. Shock Vib. 2020, 2020, 7385861. [Google Scholar] [CrossRef]
- Qu, S.; Wang, D.; Zhang, D.; Li, D.; Wie, L. Failure analysis on bogie frame with fatigue cracks caused by hunting instability. Eng. Fail. Anal. 2021, 128, 105584. [Google Scholar] [CrossRef]
- Petrone, N.; Meneghetti, M. Fatigue life prediction of lightweight electric moped frames after field load spectra collection and constant amplitude fatigue bench tests. Int. J. Fatigue 2019, 127, 564–575. [Google Scholar] [CrossRef]
- Gu, Z.; Mi, C.; Ding, Z.; Zhang, Y.; Liu, S.; Nie, D. An energy-based fatigue life prediction of a mining truck welded frame. J. Mech. Sci. Technol. 2016, 30, 3615–3624. [Google Scholar] [CrossRef]





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Radius of a Corner | Rotation Angle of Steering Wheel from Its Center Position | Deflection of the Front Wheel from the Center Position | Distance of the Center of Gravity of the Vehicle from the Link of Front and Rear Wheels | Angle of Deflection of the Link of the Front and Rear Wheels of the E3-Cycle from the Vertical Axis |
|---|---|---|---|---|
| Rz (m) | ζ (°) | j (m) | l (m) | φ (°) |
| 1.5 | 140 | 0.3239 | 0.3481 | 1.7 |
| 5 | 120 | 0.2858 | 0.3336 | 3.37 |
| 10 | 100 | 0.2439 | 0.3174 | 5.21 |
| 15 | 80 | 0.1987 | 0.2997 | 7.18 |
| 20 | 60 | 0.1518 | 0.2810 | 9.206 |
| 25 | 40 | 0.1016 | 0.2610 | 11.34 |
| 30 | 20 | 0.0511 | 0.2407 | 13.47 |
| Radius of a Corner | Maximum Speed of a Conventional Vehicle | Maximum Speed of the E3-Cycle | Percentage Expression of Speed Increase in Unconventional Vehicle versus Conventional Vehicle |
|---|---|---|---|
| Rz (m) | (km∙h−1) | (km∙h−1) | (%) |
| 1.5 | 11.1 | 13.69 | 19 |
| 5 | 20.3 | 24.5 | 17 |
| 10 | 28.66 | 33.83 | 15 |
| 15 | 35.1 | 40.34 | 13 |
| 20 | 40.53 | 45.21 | 10 |
| 25 | 45.3 | 48.8 | 7 |
| 30 | 49.6 | 51.62 | 4 |
| Eigenfrequency | ||
|---|---|---|
| Eigenmode | Designation | Value (Hz) |
| 1st | f1 | 29.671 |
| 2nd | f2 | 37.465 |
| 3rd | f3 | 75.154 |
| 4th | f4 | 116.00 |
| 5th | f5 | 120.17 |
| 6th | f6 | 121.48 |
| γ = 0 × 10−3 | γ = 1.8 × 10−3 | γ = 2.5 × 10−3 | γ = 5 × 10−3 | γ = 6.9 × 10−3 | γ = 8.8 × 10−3 | γ = 10 × 10−3 | ||
|---|---|---|---|---|---|---|---|---|
| Experiment | ε = 0 × 10−3 | - | 4.2 × 106 | 6.4 × 105 | 5.4 × 104 | 5.4 × 103 | 1.3 × 103 | 6.9 × 102 |
| B-M | - | 1 × 107 | 1 × 107 | 2.1 × 104 | 3.1 × 103 | 1.3 × 103 | 8.7 × 102 | |
| SWT | - | 1 × 107 | 1 × 107 | 3.3 × 106 | 1.5 × 105 | 3.6 × 104 | 1.8 × 104 | |
| F-S | - | 1 × 107 | 1 × 107 | 3.2 × 104 | 4.1 × 103 | 1.6 × 103 | 1.1 × 103 | |
| LIU | - | 1 × 107 | 1 × 107 | 5.7 × 104 | 5 × 103 | 2 × 103 | 1.3 × 103 | |
| Experiment | ε = 0.7 × 10−3 | 2.9 × 106 | 1.7 × 106 | 5.1 × 105 | 4 × 104 | 3.5 × 103 | 1.1 × 103 | 6.4 × 102 |
| B-M | 1 × 107 | 1 × 107 | 4.9 × 106 | 1.1 × 104 | 2.4 × 103 | 1.1 × 103 | 7.8 × 102 | |
| SWT | 1 × 107 | 1 × 107 | 1 × 107 | 5.9 × 105 | 5.4 × 104 | 1.8 × 104 | 1 × 104 | |
| F-S | 1 × 107 | 1 × 107 | 1 × 107 | 2.3 × 104 | 3.6 × 103 | 1.5 × 103 | 1 × 103 | |
| LIU | 1 × 107 | 1 × 107 | 1 × 107 | 4.3 × 104 | 4.7 × 103 | 1.9 × 103 | 1.3 × 103 | |
| Experiment | ε = 1.1 × 10−3 | 6.3 × 105 | 5.1 × 105 | 2.9 × 105 | 1.3 × 104 | 3.5 × 103 | 1.1 × 103 | 6.4 × 102 |
| B-M | 1 × 107 | 9.6 × 106 | 1 × 106 | 7.5 × 103 | 2.4 × 103 | 1.1 × 103 | 7.8 × 102 | |
| SWT | 1 × 107 | 1 × 107 | 1 × 107 | 2.2 × 105 | 5.4 × 104 | 1.8 × 104 | 1 × 104 | |
| F-S | 1 × 107 | 1 × 107 | 1 × 107 | 1.8 × 104 | 3.6 × 103 | 1.5 × 103 | 1 × 103 | |
| LIU | 1 × 107 | 1 × 107 | 1 × 107 | 3 × 104 | 4.7 × 103 | 1.9 × 103 | 1.3 × 103 | |
| Experiment | ε = 2.2 × 10−3 | 1.5 × 105 | 7.2 × 104 | 4 × 104 | 6.3 × 103 | 2.2 × 103 | 7 × 102 | 5.4 × 102 |
| B-M | 2 × 105 | 5.4 × 104 | 2.4 × 104 | 3.1 × 103 | 1.4 × 103 | 8 × 102 | 6.2 × 102 | |
| SWT | 3.1 × 106 | 9.7 × 105 | 4.1 × 105 | 2.1 × 104 | 9.4 × 103 | 4.9 × 103 | 3.4 × 103 | |
| F-S | 7.5 × 106 | 9.8 × 105 | 2.5 × 105 | 7.2 × 103 | 2.3 × 103 | 1.2 × 103 | 8.8 × 102 | |
| LIU | 2.8 × 106 | 7.4 × 105 | 2.7 × 105 | 7.8 × 103 | 3 × 103 | 1.5 × 103 | 1.1 × 103 | |
| Experiment | ε = 3.1 × 10−3 | 7.3 × 104 | 5.9 × 104 | 1.8 × 104 | 5.6 × 103 | 2 × 103 | 6.4 × 102 | 5.1 × 102 |
| B-M | 9.4 × 103 | 6.2 × 103 | 4.7 × 103 | 1.7 × 103 | 1 × 103 | 6.5 × 102 | 5.2 × 102 | |
| SWT | 6.4 × 104 | 3.8 × 104 | 2.5 × 104 | 7.3 × 103 | 4.2 × 103 | 2.7 × 103 | 2.1 × 103 | |
| F-S | 1 × 105 | 4 × 104 | 2.2 × 104 | 3.7 × 103 | 1.7 × 103 | 1 × 103 | 7.7 × 102 | |
| LIU | 5.2 × 104 | 2.7 × 104 | 1.7 × 104 | 3.9 × 103 | 2 × 103 | 1.2 × 103 | 9.6 × 102 | |
| Experiment | ε = 3.8 × 10−3 | 2.3 × 104 | 9.9 × 103 | 6.5 × 103 | 3.4 × 103 | 1.5 × 103 | 6.1 × 102 | 4.8 × 102 |
| B-M | 3.2 × 103 | 2.6 × 103 | 2.2 × 103 | 1.2 × 103 | 7.9 × 102 | 5.6 × 102 | 4.6 × 102 | |
| SWT | 9.8 × 103 | 7.3 × 103 | 6.4 × 103 | 3.9 × 103 | 2.6 × 103 | 1.8 × 103 | 1.5 × 103 | |
| F-S | 1.4 × 104 | 9.3 × 103 | 6.8 × 103 | 2.4 × 103 | 1.3 × 103 | 8.6 × 102 | 6.8 × 102 | |
| LIU | 7.5 × 103 | 5.5 × 103 | 4.6 × 103 | 2.5 × 103 | 1.6 × 103 | 1 × 103 | 8.3 × 102 | |
| Experiment | ε = 4.3 × 10−3 | 1.1 × 104 | 7.1 × 103 | 3.6 × 103 | 2.1 × 103 | 9.3 × 102 | 4.7 × 102 | 4.5 × 102 |
| B-M | 1.9 × 103 | 1.7 × 103 | 1.5 × 103 | 9.5 × 102 | 6.8 × 102 | 5 × 102 | 4.2 × 102 | |
| SWT | 4.7 × 103 | 4.3 × 103 | 3.9 × 103 | 2.7 × 103 | 1.9 × 103 | 1.4 × 103 | 1.2 × 103 | |
| F-S | 6 × 104 | 4.7 × 103 | 3.8 × 103 | 1.8 × 103 | 1.1 × 103 | 7.8 × 102 | 6.3 × 102 | |
| LIU | 3.7 × 103 | 3.3 × 103 | 3 × 103 | 1.9 × 103 | 1.3 × 103 | 9.1 × 102 | 7.5 × 102 |
| γ = 0 × 10−3 | γ = 1.8 × 10−3 | γ = 2.5 × 10−3 | γ = 5 × 10−3 | γ = 6.9 × 10−3 | γ = 8.8 × 10−3 | γ = 10 × 10−3 | ||
|---|---|---|---|---|---|---|---|---|
| Experiment | ε = 0 × 10−3 | - | 4.2 × 106 | 6.4 × 105 | 5.4 × 104 | 5.4 × 103 | 1.3 × 103 | 6.9 × 102 |
| B-M | - | 1 × 107 | 1 × 107 | 2.1 × 104 | 3.1 × 103 | 1.3 × 103 | 8.7 × 102 | |
| SWT | - | 1 × 107 | 1 × 107 | 3.3 × 106 | 1.5 × 105 | 3.6 × 104 | 1.8 × 104 | |
| F-S | - | 1 × 107 | 1 × 107 | 3.2 × 104 | 4.1 × 103 | 1.6 × 103 | 1.1 × 103 | |
| LIU | - | 1 × 107 | 1 × 107 | 5.7 × 104 | 5 × 103 | 2 × 103 | 1.3 × 103 | |
| Experiment | ε = 0.7 × 10−3 | 2.9 × 106 | 2 × 106 | 5.4 × 105 | 4.7 × 104 | 3.7 × 103 | 1.3 × 103 | 6.8 × 102 |
| B-M | 1 × 107 | 1 × 107 | 9.7 × 106 | 1.5 × 104 | 2.8 × 103 | 1.2 × 103 | 8.4 × 102 | |
| SWT | 1 × 107 | 1 × 107 | 1 × 107 | 2.9 × 106 | 1 × 105 | 2.1 × 104 | 1.5 × 104 | |
| F-S | 1 × 107 | 1 × 107 | 1 × 107 | 2.4 × 104 | 3.6 × 103 | 1.5 × 103 | 1 × 103 | |
| LIU | 1 × 107 | 1 × 107 | 1 × 107 | 4.4 × 104 | 4.5 × 103 | 1.9 × 103 | 1.3 × 103 | |
| Experiment | ε = 1.1 × 10−3 | 6.3 × 105 | 5.3 × 105 | 3.7 × 105 | 1.4 × 104 | 2.8 × 103 | 1.2 × 103 | 6.8 × 102 |
| B-M | 1 × 107 | 1 × 107 | 1.4 × 106 | 1.1 × 104 | 2.5 × 103 | 1.1 × 103 | 8.1 × 102 | |
| SWT | 1 × 107 | 1 × 107 | 1 × 107 | 2.4 × 105 | 8.1 × 104 | 1.9 × 104 | 1 × 104 | |
| F-S | 1 × 107 | 1 × 107 | 1 × 107 | 1.9 × 104 | 3.1 × 103 | 1.3 × 103 | 9 × 102 | |
| LIU | 1 × 107 | 1 × 107 | 1 × 107 | 3 × 104 | 3.8 × 103 | 1.7 × 103 | 1.2 × 103 | |
| Experiment | ε = 2.2 × 10−3 | 1.5 × 105 | 8.3 × 104 | 5.8 × 104 | 1.1 × 104 | 2.3 × 103 | 7.5 × 102 | 5.8 × 102 |
| B-M | 2 × 105 | 6.1 × 104 | 2.4 × 104 | 3.5 × 103 | 1.6 × 103 | 9 × 102 | 6.8 × 102 | |
| SWT | 3.2 × 106 | 3.2 × 106 | 3.8 × 106 | 7.2 × 105 | 3.5 × 104 | 1 × 104 | 6.3 × 103 | |
| F-S | 7.5 × 106 | 6.3 × 106 | 5.4 × 106 | 1.2 × 104 | 2.4 × 103 | 1 × 103 | 7.2 × 102 | |
| LIU | 2.9 × 106 | 8 × 105 | 2.8 × 105 | 8 × 103 | 2.1 × 103 | 1 × 103 | 7.7 × 102 | |
| Experiment | ε = 3.1 × 10−3 | 7.3 × 104 | 3.9 × 104 | 1.9 × 104 | 4.8 × 103 | 2 × 103 | 6.9 × 102 | 5.1 × 102 |
| B-M | 9.4 × 103 | 6.5 × 104 | 4.9 × 103 | 1.7 × 103 | 1 × 103 | 7.2 × 102 | 5.7 × 102 | |
| SWT | 6.4 × 105 | 6.4 × 105 | 6.4 × 104 | 6.3 × 104 | 1.6 × 104 | 7 × 103 | 4 × 103 | |
| F-S | 1 × 105 | 9 × 104 | 8.1 × 104 | 8.5 × 103 | 1.9 × 103 | 8.7 × 102 | 6.4 × 102 | |
| LIU | 5.2 × 104 | 2.9 × 104 | 1.8 × 104 | 2.9 × 103 | 1.2 × 103 | 7 × 102 | 5.7 × 102 | |
| Experiment | ε = 3.8 × 10−3 | 2.3 × 104 | 1.2 × 104 | 7.3 × 103 | 3.7 × 103 | 1.5 × 103 | 6.4 × 102 | 4.9 × 102 |
| B-M | 3.2 × 103 | 2.7 × 103 | 2.3 × 103 | 1.2 × 103 | 8 × 102 | 5.9 × 102 | 4.9 × 102 | |
| SWT | 2.8 × 103 | 9.9 × 103 | 9.8 × 103 | 9,7 × 103 | 7.2 × 103 | 4 × 103 | 2.7 × 103 | |
| F-S | 1.4 × 104 | 1.3 × 104 | 1.3 × 104 | 6.8 × 103 | 1.7 × 103 | 8.3 × 102 | 6.1 × 102 | |
| LIU | 7.5 × 103 | 5.7 × 103 | 4.5 × 103 | 1.5 × 103 | 7.7 × 102 | 5.3 × 103 | 4.5 × 102 | |
| Experiment | ε = 4.3 × 10−3 | 1.1 × 104 | 7.7 × 103 | 5.2 × 103 | 3 × 103 | 9.5 × 102 | 4.8 × 102 | 4.6 × 102 |
| B-M | 1.9 × 103 | 1.7 × 103 | 1.6 × 103 | 9.6 × 102 | 6.8 × 102 | 5.1 × 102 | 4.2 × 102 | |
| SWT | 4.6 × 103 | 4.6 × 103 | 4.6 × 103 | 4.6 × 103 | 3.9 × 103 | 3.1 × 103 | 2.3 × 103 | |
| F-S | 6 × 103 | 5.5 × 103 | 5.2 × 103 | 4.4 × 103 | 1.6 × 103 | 8.2 × 102 | 6 × 102 | |
| LIU | 3.7 × 103 | 2.8 × 103 | 2.4 × 103 | 1.1 × 103 | 6.4 × 102 | 4.7 × 102 | 4 × 102 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Blatnický, M.; Dižo, J.; Molnár, D.; Suchánek, A. Comprehensive Analysis of a Tricycle Structure with a Steering System for Improvement of Driving Properties While Cornering. Materials 2022, 15, 8974. https://doi.org/10.3390/ma15248974
Blatnický M, Dižo J, Molnár D, Suchánek A. Comprehensive Analysis of a Tricycle Structure with a Steering System for Improvement of Driving Properties While Cornering. Materials. 2022; 15(24):8974. https://doi.org/10.3390/ma15248974
Chicago/Turabian StyleBlatnický, Miroslav, Ján Dižo, Denis Molnár, and Andrej Suchánek. 2022. "Comprehensive Analysis of a Tricycle Structure with a Steering System for Improvement of Driving Properties While Cornering" Materials 15, no. 24: 8974. https://doi.org/10.3390/ma15248974
APA StyleBlatnický, M., Dižo, J., Molnár, D., & Suchánek, A. (2022). Comprehensive Analysis of a Tricycle Structure with a Steering System for Improvement of Driving Properties While Cornering. Materials, 15(24), 8974. https://doi.org/10.3390/ma15248974