
Experimental Analysis of Aerodynamic Loads of Three-Bladed Rotor


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Model and Experimental Methods
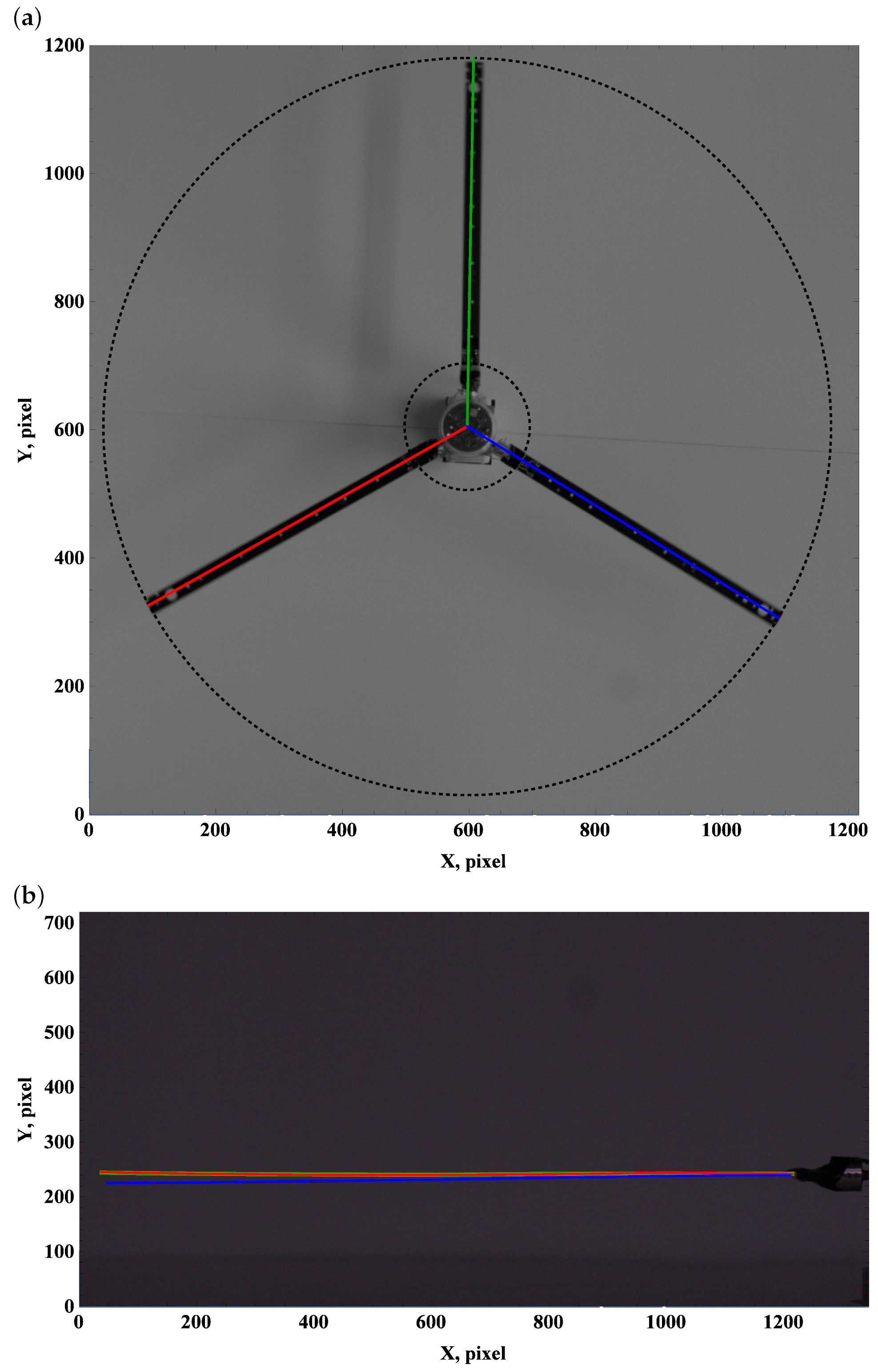
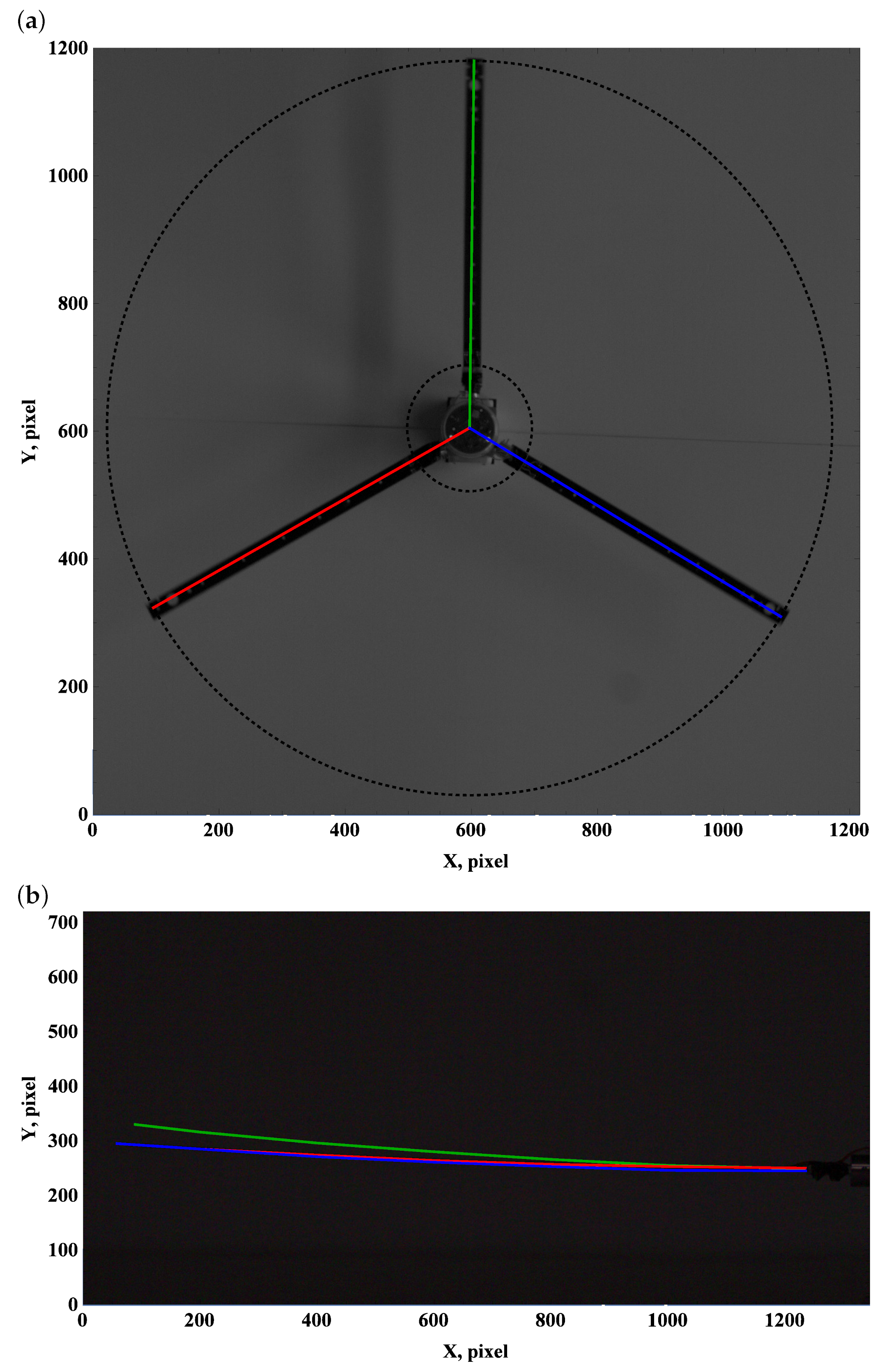
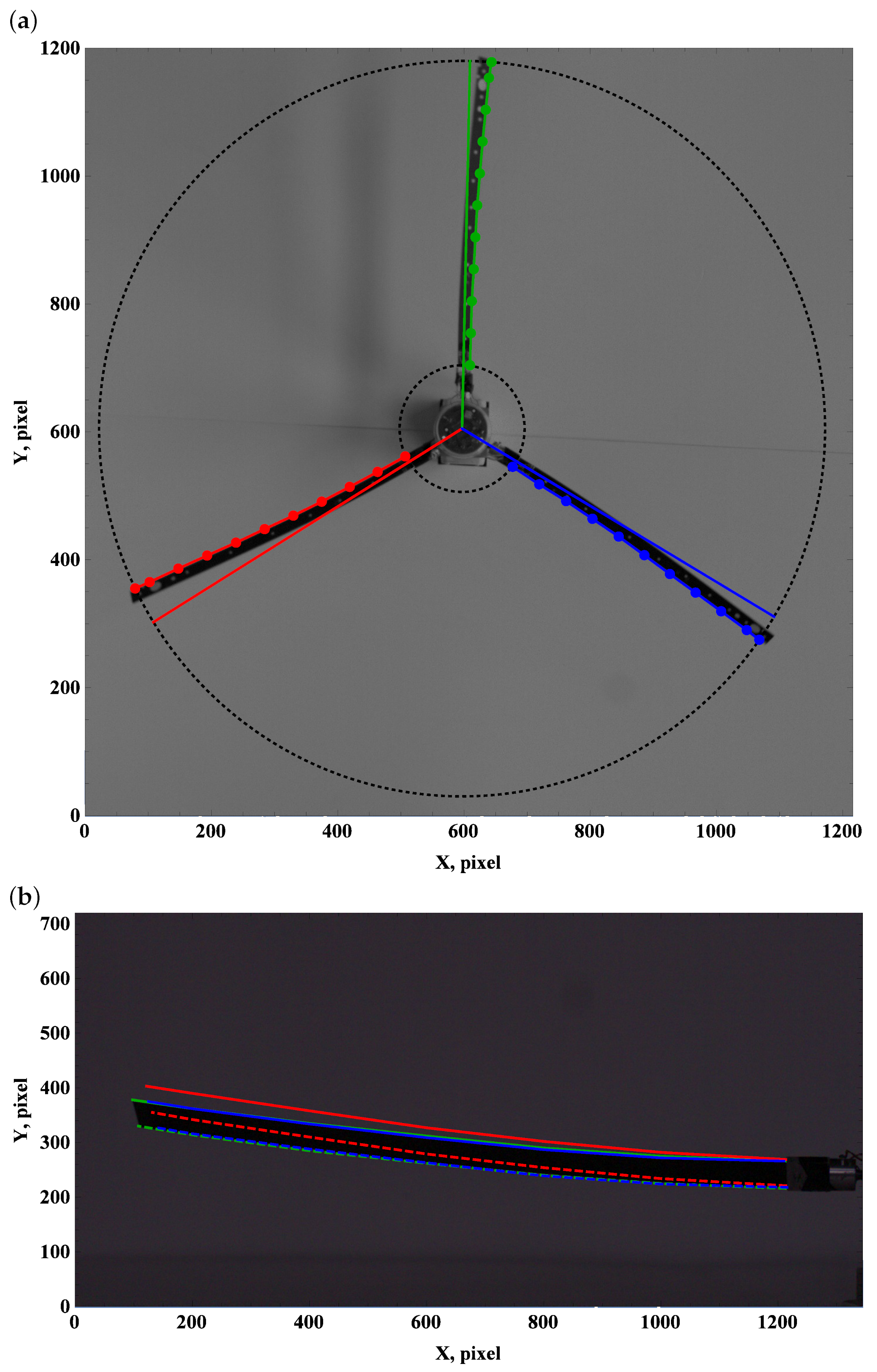
3. Results—Video Measurements
3.1. Preset Angle
3.2. Preset Angle
3.3. Preset Angle
3.4. Preset Angle
4. Mathematical Description of Deformation Field
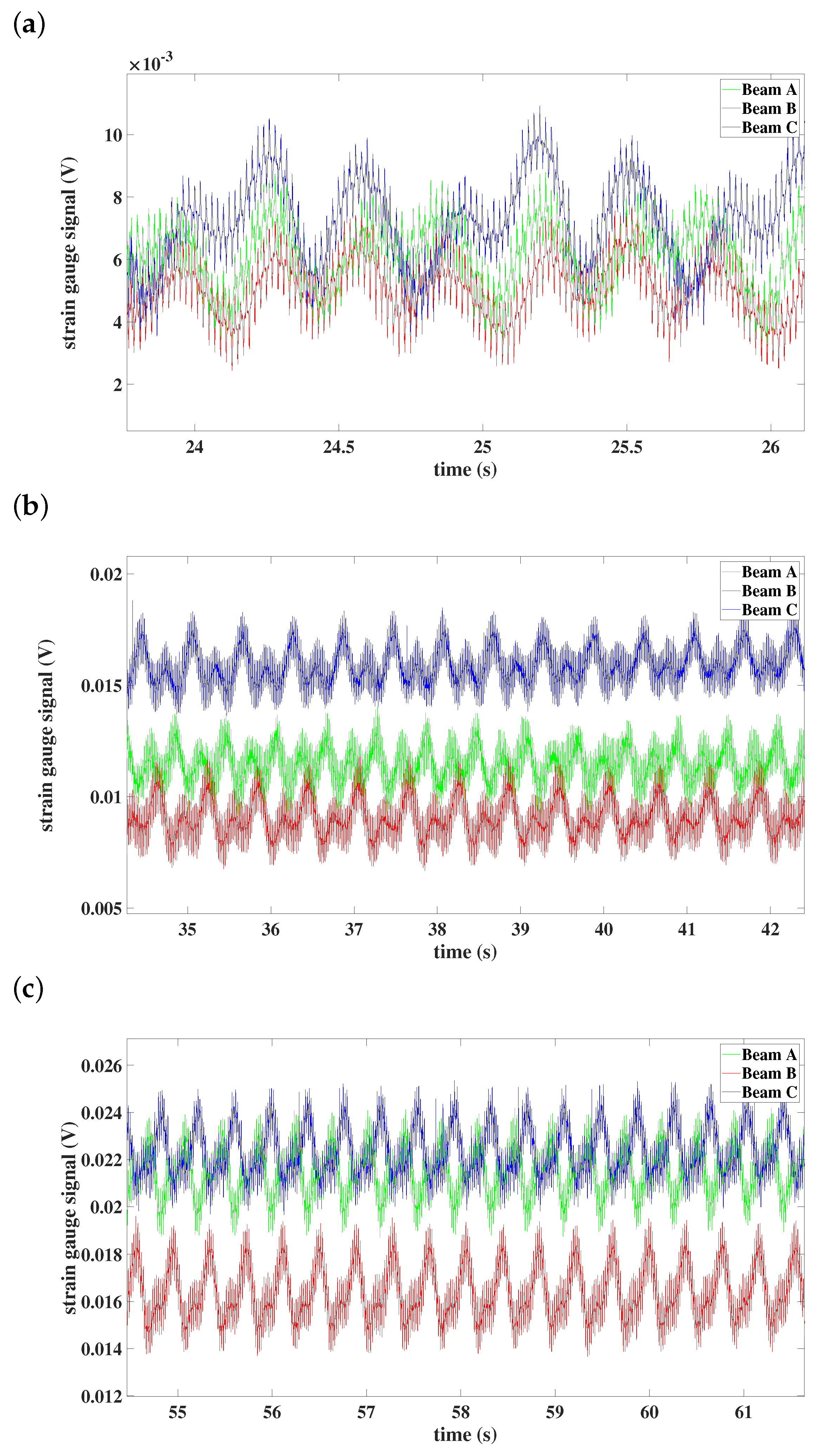
5. Results—Time Series
5.1. Preset Angle
5.2. Preset Angle
5.3. Preset Angle
5.4. Preset Angle
6. Conclusions and Final Remarks
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Banerjee, J.R.; Kennedy, D. Dynamic stiffness method for inplane free vibration of rotating beams including Coriolis effects. J. Sound Vib. 2014, 333, 7299–7312. [Google Scholar] [CrossRef]
- Li, L.; Zhang, D.G.; Zhu, W.D. Free vibration analysis of a rotating hub–functionally graded material beam system with the dynamic stiffening effect. J. Sound Vib. 2014, 333, 1526–1541. [Google Scholar] [CrossRef]
- Oh, Y.; Yoo, H.H. Vibration analysis of rotating pretwisted tapered blades made of functionally graded materials. Int. J. Mech. Sci. 2016, 119, 68–79. [Google Scholar] [CrossRef]
- Lacarbonara, W.; Arvin, H.; Bakhtiari-Nejad, F. A geometrically exact approach to the overall dynamics of elastic rotating blades—part 1: Linear modal properties. Nonlinear Dyn. 2012, 70, 659–675. [Google Scholar] [CrossRef]
- Bekhoucha, F.; Rechak, S.; Duigou, L.; Cadou, J.M. Nonlinear free vibrations of centrifugally stiffened uniform beams at high angular velocity. J. Sound Vib. 2016, 379, 177–190. [Google Scholar] [CrossRef]
- Shang, L.; Xia, P.; Hodges, D.H. Geometrically exact nonlinear analysis of pre-twisted composite rotor blades. Chin. J. Aeronaut. 2018, 31, 300–309. [Google Scholar] [CrossRef]
- Sun, J.; Lopez Arteaga, I.; Kari, L. Dynamic modeling of a multilayer rotating blade via quadratic layerwise theory. Compos. Struct. 2013, 99, 276–287. [Google Scholar] [CrossRef]
- Li, C.; Li, P.; Zhong, B.; Miao, X. Large-amplitude vibrations of thin-walled rotating laminated composite cylindrical shell with arbitrary boundary conditions. Thin-Walled Struct. 2020, 156, 106966. [Google Scholar] [CrossRef]
- Lotfan, S.; Anamagh, M.R.; Bediz, B.; Cigeroglu, E. Nonlinear resonances of axially functionally graded beams rotating with varying speed including Coriolis effects. Nonlinear Dyn. 2022, 107, 533–558. [Google Scholar] [CrossRef]
- Warminski, J.; Kloda, L.; Lenci, S. Nonlinear vibrations of an extensional beam with tip mass in slewing motion. Meccanica 2020, 55, 2311–2335. [Google Scholar] [CrossRef]
- Kloda, L.; Warminski, J. Nonlinear longitudinal–bending–twisting vibrations of extensible slowly rotating beam with tip mass. Int. J. Mech. Sci. 2022, 220, 107153. [Google Scholar] [CrossRef]
- Warminski, J.; Kloda, L.; Latalski, J.; Mitura, A.; Kowalczuk, M. Nonlinear vibrations and time delay control of an extensible slowly rotating beam. Nonlinear Dyn. 2021, 103, 3255–3281. [Google Scholar] [CrossRef]
- Georgiades, F.; Latalski, J.; Warminski, J. Equations of motion of rotating composite beam with a nonconstant rotation speed and an arbitrary preset angle. Meccanica 2014, 49, 1833–1858. [Google Scholar] [CrossRef] [Green Version]
- Latalski, J.; Kowalczuk, M.; Warminski, J. Nonlinear electro-elastic dynamics of a hub–cantilever bimorph rotor structure. Int. J. Mech. Sci. 2022, 36, 107195. [Google Scholar] [CrossRef]
- Latalski, J.; Bocheński, M.; Warmiński, J.; Jarzyna, W.; Augustyniak, M. Modelling and Simulation of 3 Blade Helicopter’s Rotor Model. Acta Phys. Pol. A 2014, 125, 1380–1384. [Google Scholar] [CrossRef]
- Szmit, Z.; Warmiński, J. Synchronization phenomenon in the de-tuned rotor driven by regular or chaotic oscillations. In CMM—2017, 22nd International Conference on Computer Methods in Mechanics, 13–16 September 2017, Lublin, Poland; AIP Publishing LLC: Melville, NY, USA, 2018; p. 100013. [Google Scholar] [CrossRef]
- Warminski, J.; Latalski, J.; Szmit, Z. Vibration of a mistuned three-bladed rotor under regular and chaotic excitations. J. Theor. Appl. Mech. 2018, 2018, 549. [Google Scholar] [CrossRef] [Green Version]
- Rand, O. Experimental study of the natural frequencies of rotating thin-walled composite blades. Thin-Walled Struct. 1995, 21, 191–207. [Google Scholar] [CrossRef]
- Teter, A.; Gawryluk, J. Experimental modal analysis of a rotor with active composite blades. Compos. Struct. 2016, 153, 451–467. [Google Scholar] [CrossRef]
- Latalski, J.; Kowalczuk, M. Experimental vs. analytical modal analysis of a composite circumferentially asymmetric stiffness box beam. In CMM—2017, 22nd International Conference on Computer Methods in Mechanics, 13–16 September 2017, Lublin, Poland; AIP Publishing LLC: Melville, NY, USA, 2018; p. 100018. [Google Scholar] [CrossRef]
- Szmit, Z. Vibration, synchronization and localization of three-bladed rotor: Theoretical and experimental studies. Eur. Phys. J. Spec. Top. 2021, 230, 3615–3625. [Google Scholar] [CrossRef]
- Huang, J.; Wang, K.; Tang, J.; Xu, J.; Song, H. An experimental study of the centrifugal hardening effect on rotating cantilever beams. Mech. Syst. Signal Process. 2022, 165, 108291. [Google Scholar] [CrossRef]
- Mitura, A.; Gawryluk, J.; Teter, A. Numerical and experimental studies on the rotating rotor with three active composite blades. Eksploat. I Niezawodn.—Maint. Reliab. 2017, 19, 571–579. [Google Scholar] [CrossRef]
- Gawryluk, J.; Mitura, A.; Teter, A. Dynamic response of a composite beam rotating at constant speed caused by harmonic excitation with MFC actuator. Compos. Struct. 2019, 210, 657–662. [Google Scholar] [CrossRef]
- Vannucci, P.; Verchery, G. A new method for generating fully isotropic laminates. Compos. Struct. 2002, 58, 75–82. [Google Scholar] [CrossRef]



















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Szmit, Z.; Kloda, L.; Kowalczuk, M.; Stachyra, G.; Warmiński, J. Experimental Analysis of Aerodynamic Loads of Three-Bladed Rotor. Materials 2022, 15, 3335. https://doi.org/10.3390/ma15093335
Szmit Z, Kloda L, Kowalczuk M, Stachyra G, Warmiński J. Experimental Analysis of Aerodynamic Loads of Three-Bladed Rotor. Materials. 2022; 15(9):3335. https://doi.org/10.3390/ma15093335
Chicago/Turabian StyleSzmit, Zofia, Lukasz Kloda, Marcin Kowalczuk, Grzegorz Stachyra, and Jerzy Warmiński. 2022. "Experimental Analysis of Aerodynamic Loads of Three-Bladed Rotor" Materials 15, no. 9: 3335. https://doi.org/10.3390/ma15093335
APA StyleSzmit, Z., Kloda, L., Kowalczuk, M., Stachyra, G., & Warmiński, J. (2022). Experimental Analysis of Aerodynamic Loads of Three-Bladed Rotor. Materials, 15(9), 3335. https://doi.org/10.3390/ma15093335