Towards Low-Cost Effective and Homogeneous Thermal Activation of Shape Memory Polymers

Abstract
:1. Introduction
2. Materials and Methods
2.1. Shape Memory Epoxy and Activation Materials

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Accura® 60 epoxy resin from 3D systems | |
|---|---|
| Property | Value |
| Density | 1.21 g/cm3 |
| Tensile strength | 58–68 MPa |
| Young’s modulus | 2690–3100 MPa |
| Activation temperature (Tact) | 58–62 °C |
| Hardness-Shore D scale | 86 |
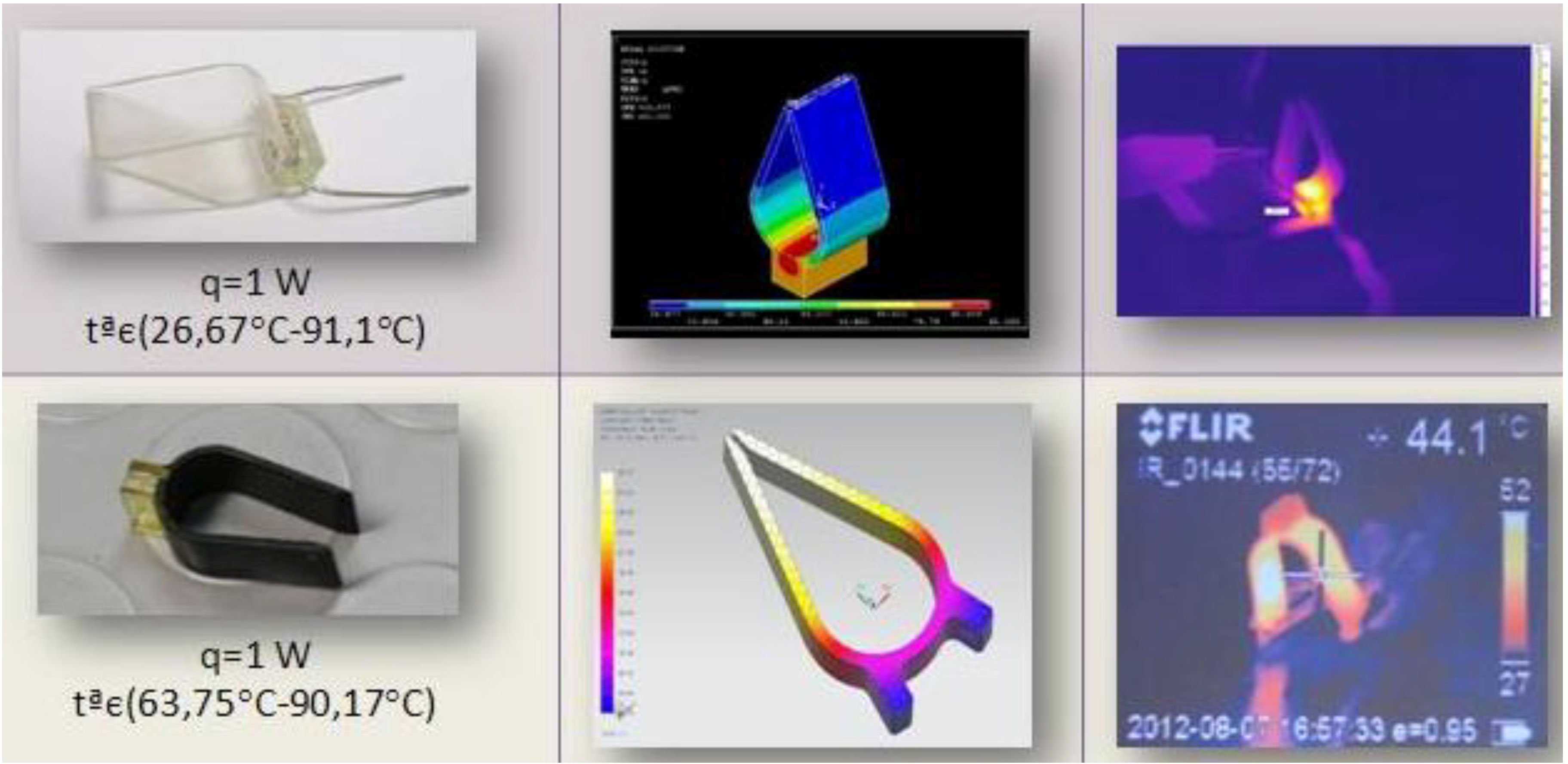
2.2. Computer-Aided Designs and FEM-Based Thermal Simulations
| Property | Value |
|---|---|
| Thermal conductivity (epoxy) | 0.2 W/(m·K) at 25 °C |
| Specific heat (epoxy) | 1200 J/(kg·K) |
| Emissivity (epoxy) | 0.86 |
| Convection coefficient | 20 W/(m2·K) |
| Room temperature | 298 K |
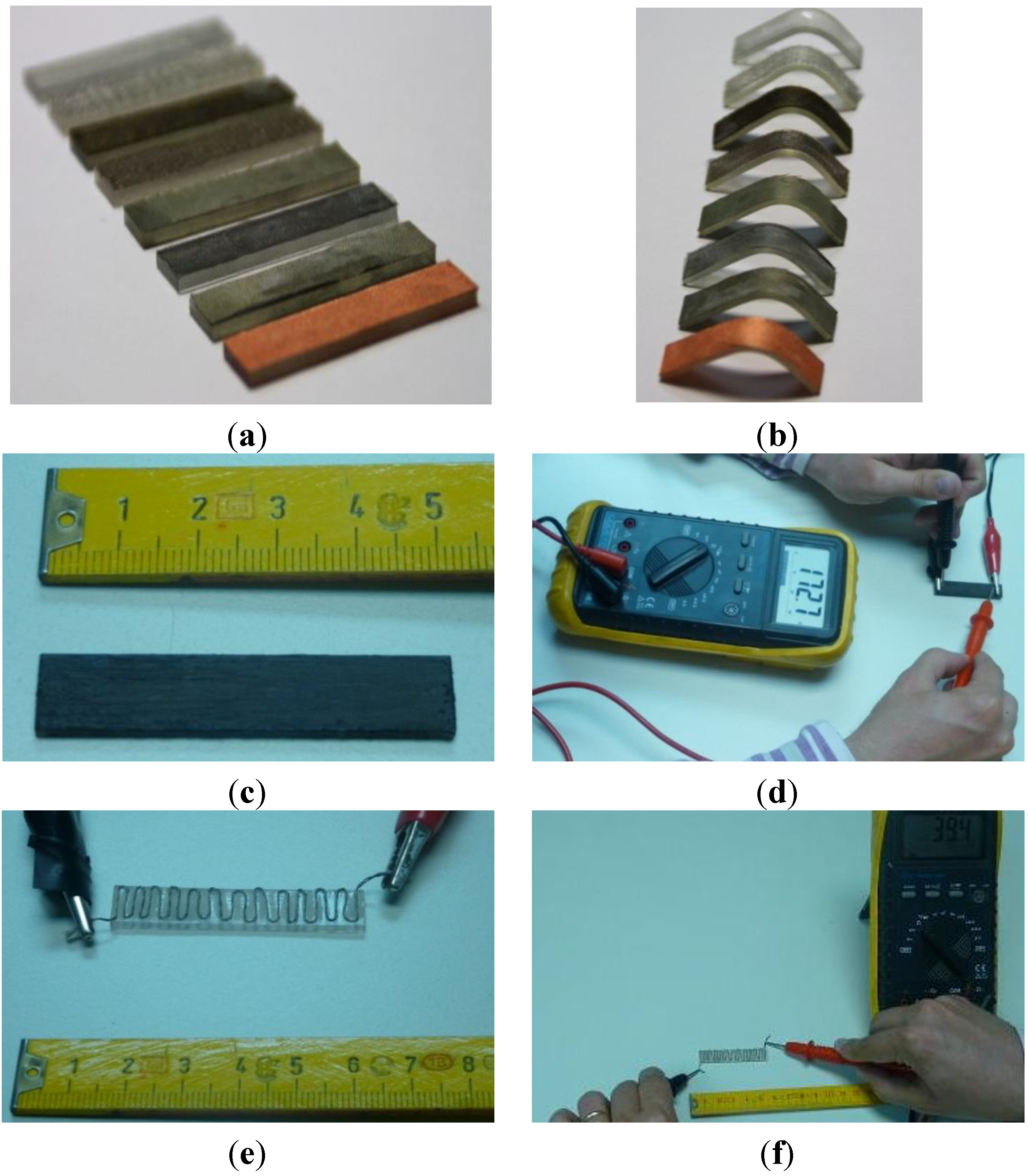
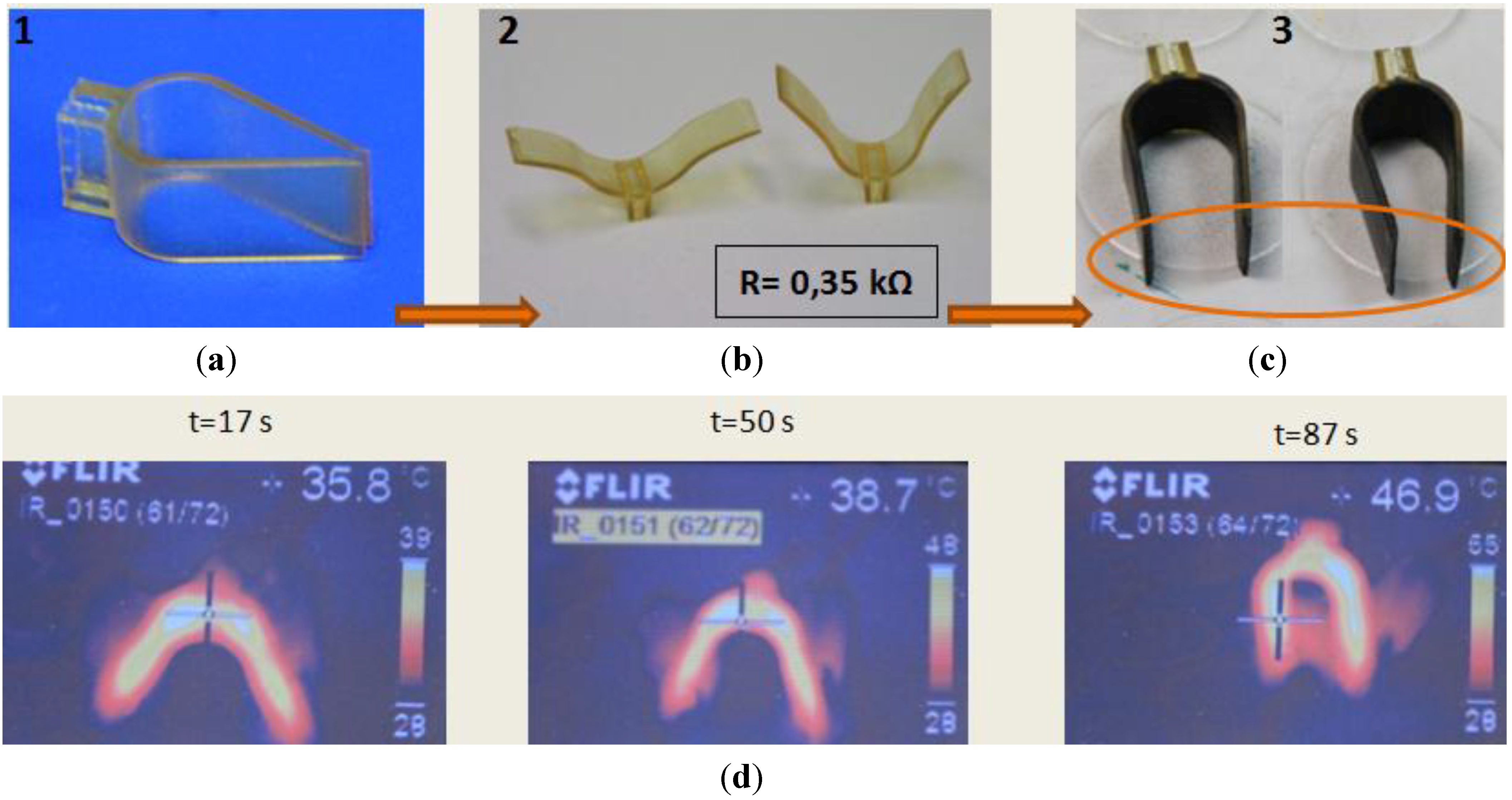
2.3. Prototypes and Trials


| Electrical resistance measured between the extremes of the probes | Value |
|---|---|
| Electronylon | ≈0 Ω/cm |
| Nickel electronylon | ≈0 Ω/cm |
| Clearmesh | ≈0.2 Ω/cm |
| Softmesh | 4 Ω/cm |
| Electrolycra | 10 Ω/cm |
| Steel cloth | 0.1 Ω/cm |
| Conductive thread | 0.4 Ω/cm |
| Conductive ink | 35 Ω/cm |
3. Results and Discussion
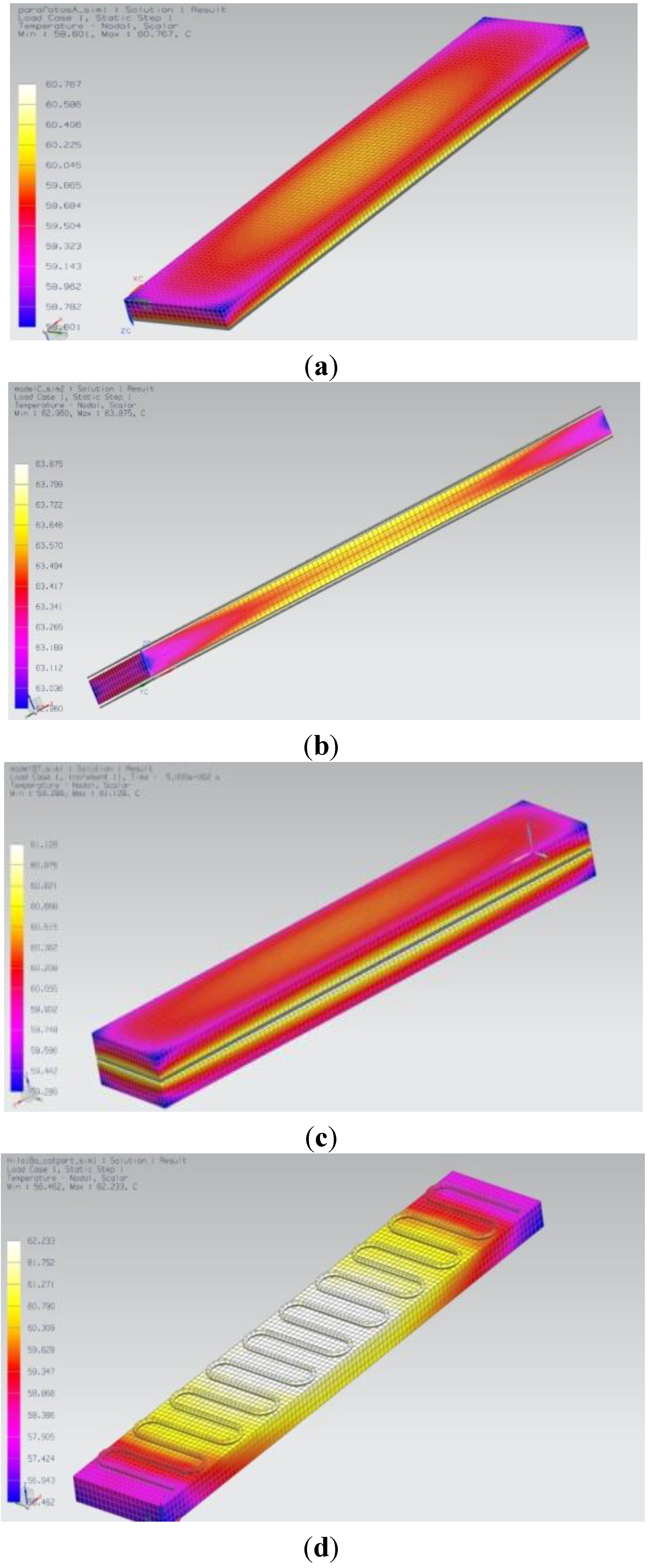
3.1. Results from Thermal Simulations: Analysis of the Different Configurations
| Configuration | Heating power applied to each coating | Steady-state temperature range |
|---|---|---|
| (a) One-side coating | 1 W | [58.6–60.8 °C] |
| (b) Two-side coating | 0.5 W | [59.1–59.8 °C] |
| (c) Coating sandwiched between two half probes | 1.2 W | [59.2–61.1 °C] |
| (d) Thread upon probe | 1.2 W | [56.4–62.2 °C] |
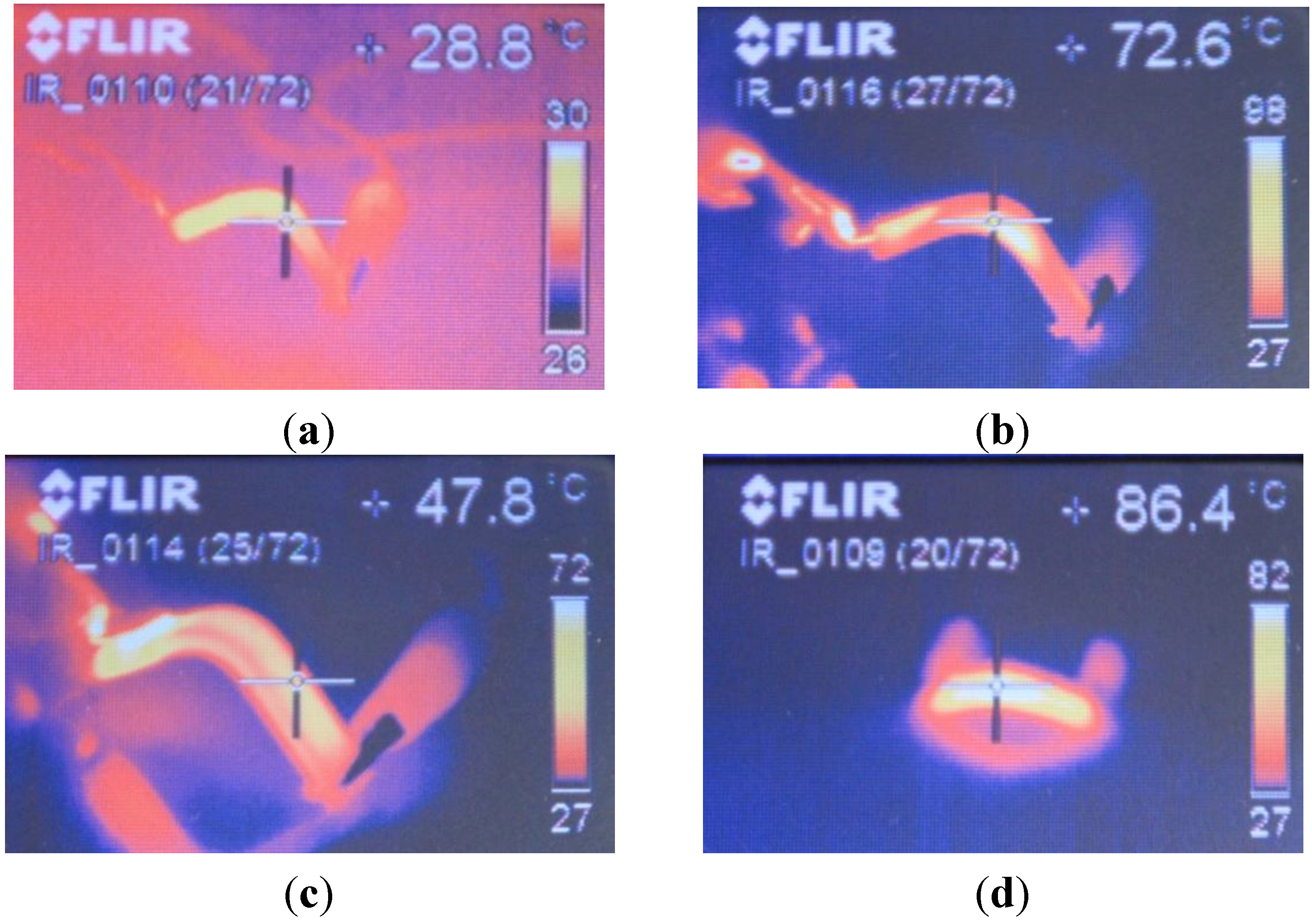
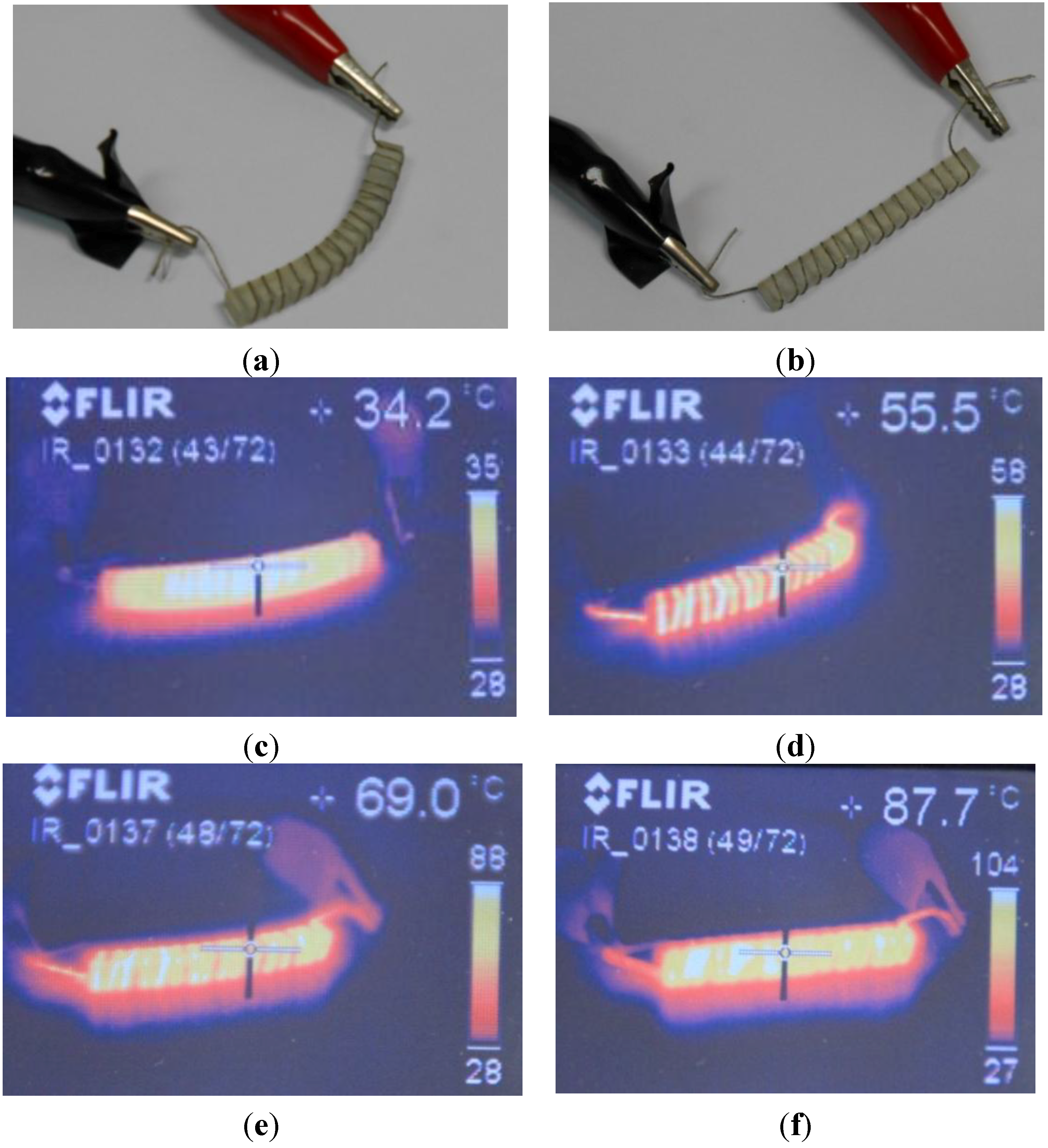
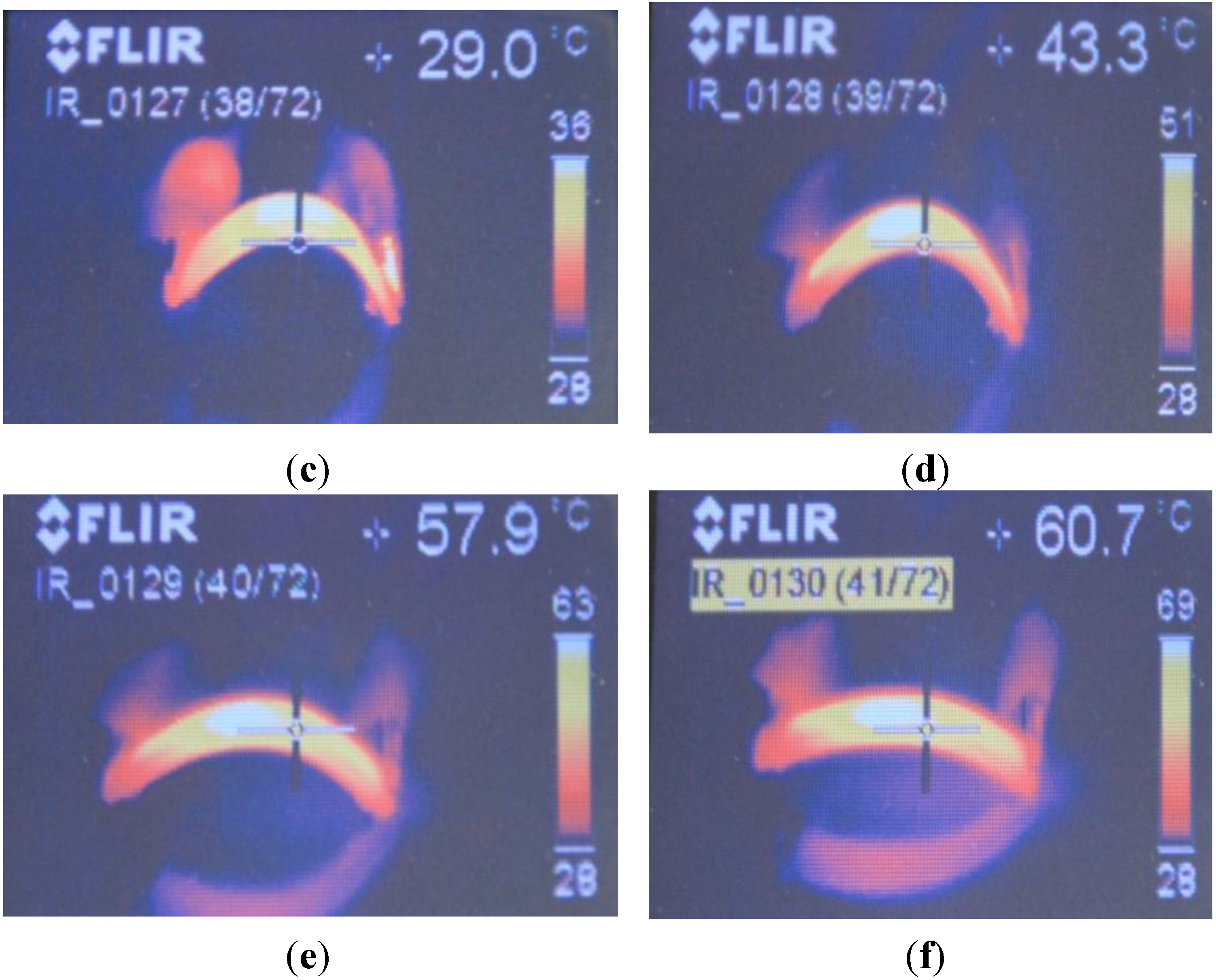
3.2. Results from Shape-Memory Effect Activation Trials




| Heating element | Typical temperature variation range within the polymer (according to real trials) | Recovery ratio (**) | Reference |
|---|---|---|---|
| Electrotextiles and Faraday film | 33–37 °C | >95% | Present study |
| Conductive thread | 25–29 °C | ≈100% | Present study |
| Conductive ink (upon probe bent 90° during training) | 18–24 °C | >85% | Present study |
| Conductive ink (upon pincer opened 90° during training) | 17–25 °C | 83% | Present study |
| Conductive ink (upon pincer opened 160° during training) | 17–25 °C | 76% | Present study |
| Heating resistors | 50–60 °C | >80% | [10,31,32] |
| Peltier devices | 40–50 °C (in the heated zone) | >85% | [19] |
| Induction heating (coil core) | 35–45 °C | >80% | [10] |
| Induction heating (nanoparticles) | <15 °C | ≈100% | [16,20,33] |
| Light activation (laser heating) | <10 °C (very thin device) | ≈100% | [21] |
3.3. Final Application Example: Shape-Memory Active Catheter End


3.4. Final Summary and Discussion
4. Conclusions
Acknowledgments
Conflicts of Interest
References
- Lendlein, A.; Langer, R. Biodegradable, elastic shape-memory polymers for potential biomedical applications. Science 2002, 296, 1673–1676. [Google Scholar] [CrossRef] [PubMed]
- Lendlein, A.; Kelch, S. Shape-memory polymers. Angew. Chem. Int. 2002, 41, 2034–2057. [Google Scholar] [CrossRef]
- Lendlein, A.; Kelch, S. Shape-memory polymers as stimuli-sensitive implant materials. Clin. Hemorheol. Microcirc. 2005, 32, 105–116. [Google Scholar] [PubMed]
- Liu, C.; Mather, P.T. Thermomechanical characterization of a tailored series of shape memory polymers. J. Appl. Med. Polym. 2002, 6, 47–52. [Google Scholar]
- Sokolowsky, W.; Metcalfe, A.; Hayashi, S.; Yahia, L.; Raymond, J. Medical applications of shape memory polymers. Biomed. Mater. 2007, 2, 23–27. [Google Scholar] [CrossRef]
- Díaz Lantada, A.; Lafont Morgado, P.; Lorenzo Yustos, H.; Lorenzo Esteban, V.; Muñoz-García, J.; Muñoz Sanz, J.L.; Echavarri Otero, J.; Muñoz Guijosa, J.M. Biodevices Based on Shape-Memory Polymers: Current Capabilities and Challenges. In Proceedings of Biodevices 2009—International Conference on Biomedical Electronics and Devices, 20 January 2009; IEEE Engineering in Medicine and Biology Society: Porto, Portugal.
- Liu, C.; Qin, H.; Mather, P.T. Review of progress in shape-memory polymers. J. Mater. Chem. 2007, 17, 1553–1558. [Google Scholar]
- Liu, Y.; Gall, K.; Dunn, M.-L.; Mc Cluskey, P. Thermomechanical recovery couplings of shape memory polymers in flexure. Smart Mater. Struct. 2003, 12, 947–954. [Google Scholar] [CrossRef]
- Lorenzo, V.; Díaz Lantada, A.; Lafont Morgado, P.; Lorenzo Yustos, H.; Fonseca, C.; Acosta, J. Physical ageing of a PU based shape memory polymer: Influence on their applicability to the development of medical devices. Mater. Design 2009, 30, 2431–2437. [Google Scholar] [CrossRef] [Green Version]
- Díaz Lantada, A.; Lafont, P. Metodología para el desarrollo de dispositivos médicos basados en el empleo de polímeros activos como sensores y actuadores (in Spanish). Ph.D. Dissertation, Mechanical Engineering & Manufacturing Department, Universidad Politécnica de Madrid, Madrid, Spain, 1 July 2009. [Google Scholar]
- Tobushi, H.; Hara, H.; Yamada, E.; Hayashi, S. Thermomechanical properties in a thin film of shape memory polymer of polyurethane series. Smart Mater. Struct. 1996, 5, 483–491. [Google Scholar] [CrossRef]
- Leng, J.S.; Lu, H.; Liu, Y.; Du, S.Y. Electro-active shape memory polymer filled with nanocarbon particles and short carbon fibers. Appl. Phys. Lett. 2007, 91, 144105:1–144105:10. [Google Scholar] [CrossRef]
- Leng, J.S.; Lan, X.; Liu, Y.; Du, S.Y. Electroactive thermoset shape memory polymer nanocomposite filled with nanocarbon powders. Smart Mater. Struct. 2009, 19. [Google Scholar] [CrossRef]
- Leng, J.S. Electrical conductivity of shape memory polymer embedded with micro Ni chains. Appl. Phys. Lett. 2007, 91, 014104:1–014104:10. [Google Scholar] [CrossRef]
- Leng, J.S.; Huang, W.M.; Lan, X.; Liu, Y.J.; Liu, N.; Phee, S.Y.; Du, S.Y. Significantly reducing electrical resistivity by forming conductive Ni chains in a polyurethane shape-memory polymer/carbon black composite. Appl. Phys. Lett. 2008, 92. [Google Scholar] [CrossRef]
- Liu, Y.; Lu, H.; Lan, X.; Leng, J.S. Review of electro-activate shape-memory polymer composite. Compos. Sci. Technol. 2009, 69, 2064–2068. [Google Scholar] [CrossRef]
- Lu, H.; Gou, J.; Leng, J.S.; Du, S. Magnetically aligned carbon nanotube in nanopaper enabled shape-memory nanocomposite for high speed electrical actuation. Appl. Phys. Lett. 2011, 98. [Google Scholar] [CrossRef]
- Lu, H.; Liu, Y.; Gou, J.; Leng, J.S.; Du, S. Surface coating of multi-walled carbon nanotube nanopaper on shape-memorypolymer for multifunctionalization. Compos. Sci. Technol. 2011, 71, 1427–1434. [Google Scholar] [CrossRef]
- Díaz Lantada, A.; Lafont Morgado, P.; Muñoz Sanz, J.L.; Muñoz García, J.; Muñoz Guijosa, J.M.; Echavarri Otero, J. Intelligent structures based on the improved activation of shape memory polymers using Peltier cells. Smart Mater. Struct. 2010, 19. [Google Scholar] [CrossRef]
- Mohr, R.; Kartz, K.; Wiegel, T.; Lucka-Gabor, M.; Moneke, M.; Lendlein, A. Initiation of shape-memory effect by inductive heating of magnetic nanoparticles in thermoplastic polymers. Proc. Natl. Acad. Sci. USA 2006, 103, 3540–3545. [Google Scholar] [CrossRef] [PubMed]
- Wilson, T.; Small, W., IV; William, B.J.; Bearinger, J.P.; Maitland, D.J. Shape memory polymer therapeutic devices for stroke. Smart Med. Biomed. Sens. Technol. III Proc. SPIE 2005, 6007, 157–164. [Google Scholar]
- Chockalingam, K.; Jawahar, N.; Chandrasekhar, U. Influence of layer thickness on mechanical properties in stereolithography. Rapid Prototyp. J. 2006, 12, 106–113. [Google Scholar] [CrossRef]
- Widemann, B.; Dusel, K.H.; Eschl, J. Investigation into the influence of material and process on part distortion. Rapid Prototyp. J. 1995, 1, 17–22. [Google Scholar] [CrossRef]
- Salmoria, G.V.; Ahrens, C.H.; Fredel, M.; Soldi, V.; Pires, A.T.N. Stereolithography somos 7110 resin: Mechanical behavior and fractography of parts post-cured by different methods. Polym. Test. 2005, 24, 175–162. [Google Scholar] [CrossRef]
- Sandoval, J.H.; Wicker, R.B. Functionalizing stereolithography resins: Effects of dispersed multi-walled carbon nanotubes on physical properties. Rapid Prototyp. J. 2006, 12, 292–303. [Google Scholar] [CrossRef]
- Yang, B.; Huang, W.; Li, C.; Lee, C.M.; Li, L. On the effects of moisture in a polyurethane shape memory polymer. Smart Mater. Struct. 2004, 13, 191–195. [Google Scholar] [CrossRef]
- Stampfl, J.; Schuster, M.; Baudis, S.; Lichtenegger, H.; Liska, R.; Turecek, C.; Varga, F. Biodegradable Stereolithography Resins with Defined Mechanical Properties. In Virtual and Rapid Manufacturing, Proceedings of VRAP, Leira, Portugal, 1 October 2007; pp. 283–288.
- Bens, A.; Seitz, H.; Bermes, G.; Emons, M.; Pansky, A.; Roitzheim, B.; Tobiasch, T.C. Non-toxic flexible photopolymers for medical stereolithography technology. Rapid Prototyp. J. 2007, 13, 38–47. [Google Scholar] [CrossRef]
- Giannatsis, J.; Dedoussis, V. Additive fabrication technologies applied to medicine and health care: A review. Int. J. Adv. Manuf. Technol. 2009, 40, 116–127. [Google Scholar] [CrossRef]
- Chapman, A.J. Transmisión del Calor; (in Spanish). Librería Editorial Bellisco: Madrid, Spain, 1990. [Google Scholar]
- Díaz Lantada, A.; Lafont Morgado, P.; Lorenzo Yustos, H.; Muñoz García, J.; Muñoz Sanz, J.L.; Echavarri Otero, J.; Muñoz Guijosa, J.M. Rapid Prototyping and Rapid Tooling Technologies for Developing Shape-Memory Polymer Based Devices. In Proceedings of IV ECCOMAS Thematic Conference, Smart Structures and Materials (SMART’09), Porto, Portugal, 15 July 2009.
- Díaz Lantada, A.; Lafont Morgado, P.; Lorenzo Yustos, H.; Muñoz García, J.; Muñoz Sanz, J.L.; Echavarri Otero, J.; Muñoz Guijosa, J.M. Combining FEM Simulations and Infrared Thermography for Optimising the Activation System of Shape-Memory Polymer Based Devices. In Proceedings of IV ECCOMAS Thematic Conference, Smart Structures and Materials (SMART’09), Porto, Portugal, 15 July 2009.
- Kratz, K.; Narendra Kumar, U.; Lendlein, A. Triple Shape Properties of Magneto Sensitive Nanocomposites Determined in Tensile Tests. In Proceedings of 18th International Conference on Composite Materials, Jeju, Korea, 1 January 2011; pp. 1–5.
- Hu, J.; Zhu, Y.; Huang, H.; Lu, J. Recent advances in shapememory polymers: Structure, mechanism, functionality, modeling and applications. Prog. Polym. Sci. 2012, 37, 1720–1763. [Google Scholar] [CrossRef]
- Meng, H.; Li, G. A review of stimuli-responsive shape memory polymer composites. Polymer 2013, 53, 2199–2221. [Google Scholar] [CrossRef]
- Xie, T. Tunable polymer multi-shape memory effect. Nature 2010, 464, 267–270. [Google Scholar] [CrossRef] [PubMed]
- Li, G.; Uppu, N. Shape memory polymer based self-healing syntactic foam: 3-D confined thermomechanical characterization. Compos. Sci. Technol. 2010, 70, 1419–1427. [Google Scholar] [CrossRef]
- Rodriguez, E.D.; Luo, X.; Mather, P.T. Linear/network poly(ε-caprolactone) blends exhibiting shape memory assisted self-healing (SMASH). ACS Appl. Materi. Interfaces 2011, 3, 152–161. [Google Scholar] [CrossRef]
- Patrick, J.F.; Sottos, N.R.; White, S.R. Microvascular based self-healing polymeric foam. Polymer 2012, 31, 4231–4240. [Google Scholar] [CrossRef]
- Odom, S.A.; Chayanupatkul, S.; Blaiszik, B.J.; Zhao, O.; Jackson, A.C.; Braun, P.V.; Sottos, N.R.; White, S.R.; Moore, J.S. A self-healing conductive ink. Adv. Mater. 2012, 24, 2578–2581. [Google Scholar] [CrossRef] [PubMed]
© 2013 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Lantada, A.D.; Rebollo, M.S. Towards Low-Cost Effective and Homogeneous Thermal Activation of Shape Memory Polymers. Materials 2013, 6, 5447-5465. https://doi.org/10.3390/ma6125447
Lantada AD, Rebollo MS. Towards Low-Cost Effective and Homogeneous Thermal Activation of Shape Memory Polymers. Materials. 2013; 6(12):5447-5465. https://doi.org/10.3390/ma6125447
Chicago/Turabian StyleLantada, Andrés Díaz, and María Santamaría Rebollo. 2013. "Towards Low-Cost Effective and Homogeneous Thermal Activation of Shape Memory Polymers" Materials 6, no. 12: 5447-5465. https://doi.org/10.3390/ma6125447
APA StyleLantada, A. D., & Rebollo, M. S. (2013). Towards Low-Cost Effective and Homogeneous Thermal Activation of Shape Memory Polymers. Materials, 6(12), 5447-5465. https://doi.org/10.3390/ma6125447