Auxiliary Model Based Multi-Innovation Stochastic Gradient Identification Algorithm for Periodically Non-Uniformly Sampled-Data Hammerstein Systems

Abstract
:1. Introduction
2. Problem Description
3. Identification Algorithms
3.1. The AM-SG Algorithm
3.2. The AM-MISG Algorithm
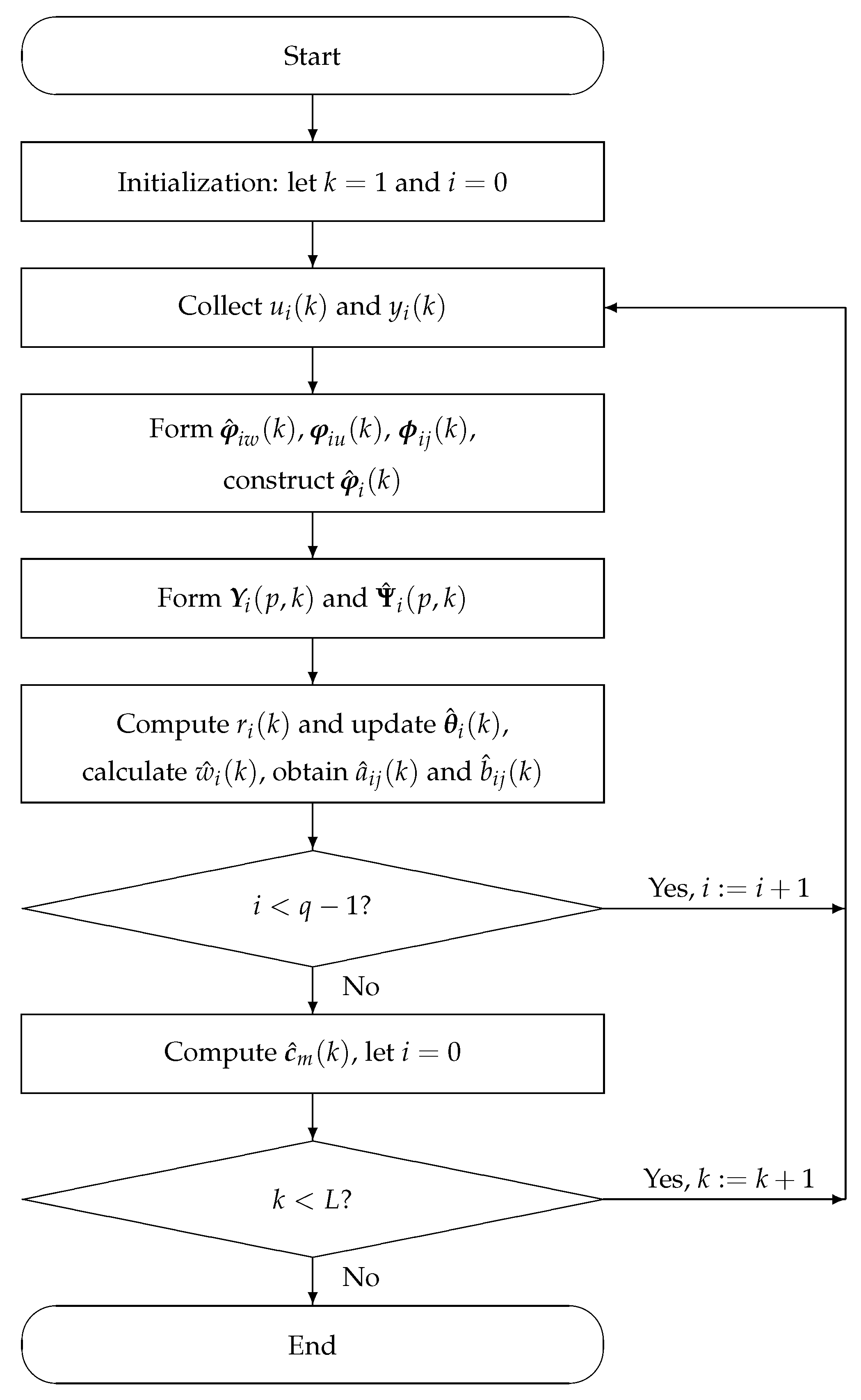
- Initialization: Choose the data length L, the innovation length p and the forgetting factor ; give the nonlinear basis functions ; set , , for and ; take the initial values to be , where and is a column vector of ones; let and .
- Collect the non-uniformly sampled input-output data and .
- Calculate based on ; form , , by (19)–(21); and construct by (18).
- Form the stacked output vector and the stacked information matrix by (16) and (17), respectively.
- Compute the step size by (15) and update the parameter estimate by (14); calculate by (22); obtain and based on (23) and (24), respectively.
- If , then increase i by one, and go to Step 2; otherwise, compute by (25); let and go to the next step.
- If , then increase k by one, and go to Step 2; otherwise, terminate the computing process.
3.3. The Main Convergence Result
- (A1)
- (A2)
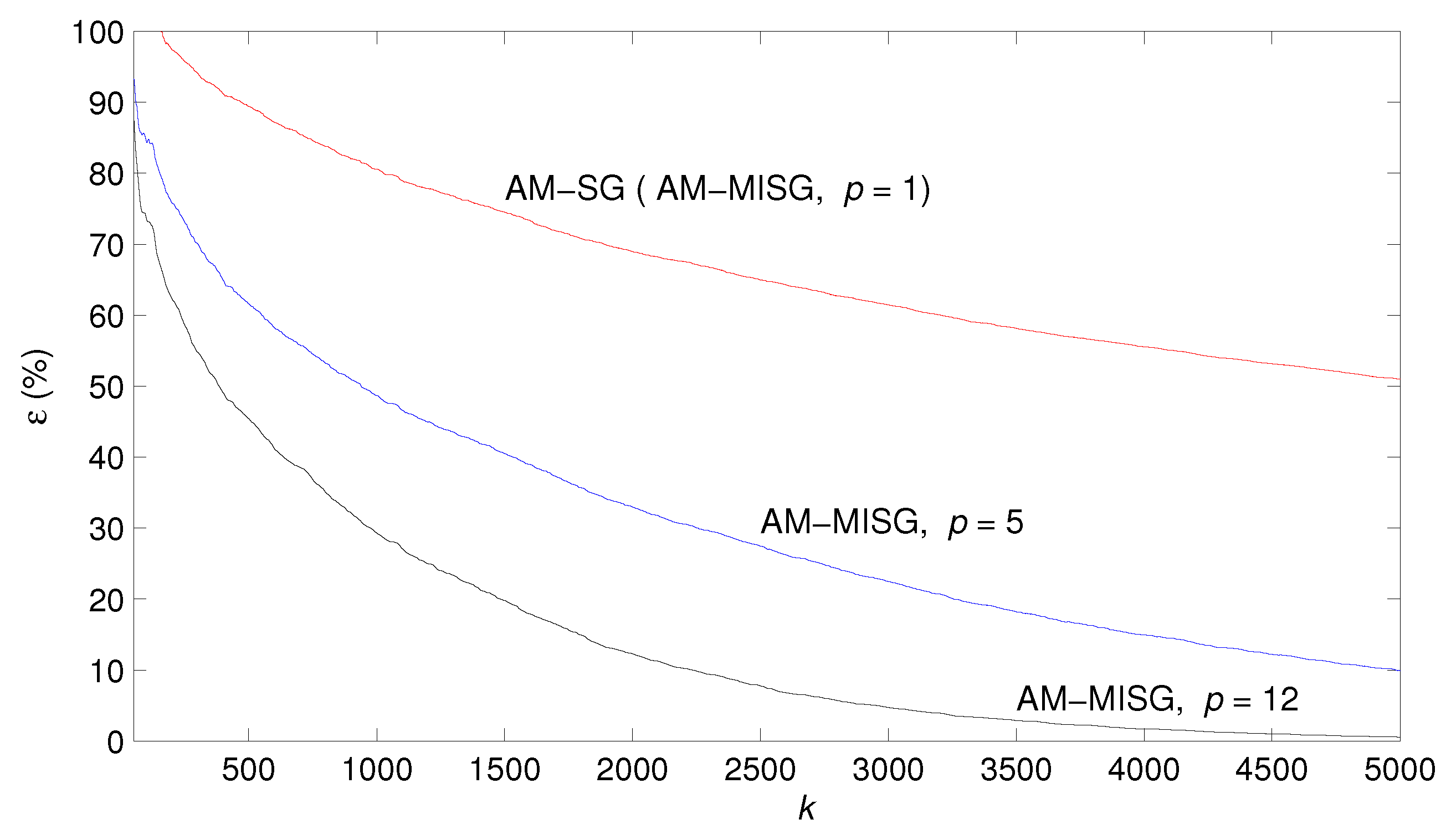
4. Simulation Example
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Liu, Y.; Wang, H.; Yu, J.; Li, P. Selective recursive kernel learning for online identification of nonlinear systems with NARX form. J. Process Control 2010, 20, 181–194. [Google Scholar] [CrossRef]
- Tang, Y.; Li, Z.; Guan, X. Identification of nonlinear system using extreme learning machine based Hammerstein model. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 3171–3183. [Google Scholar] [CrossRef]
- Giri, F.; Bai, E.W. Block-Oriented Nonlinear System Identification; Springer: London, UK, 2010. [Google Scholar]
- Wills, A.; Schön, T.B.; Ljung, L.; Ninness, B. Identification of Hammerstein-Wiener models. Automatica 2013, 49, 70–81. [Google Scholar] [CrossRef]
- Lawrynczuk, M. Nonlinear predictive control for Hammerstein-Wiener systems. ISA Trans. 2014, 55, 49–62. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.Y.; Wang, X.D.; Wang, D.Q. Identification of dual-rate sampled Hammerstein systems with a piecewise-linear nonlinearity using the key variable separation technique. Algorithms 2015, 8, 366–379. [Google Scholar] [CrossRef]
- Chen, J.; Wang, X.; Ding, R. Gradient based estimation algorithm for Hammerstein systems with saturation and dead-zone nonlinearities. Appl. Math. Model. 2012, 36, 238–243. [Google Scholar] [CrossRef]
- Lv, X.; Ren, X. Non-iterative identification and model following control of Hammerstein systems with asymmetric dead-zone non-linearities. IET Control Theory Appl. 2012, 6, 84–89. [Google Scholar] [CrossRef]
- Giri, F.; Rochdi, Y.; Brouri, A.; Chaoui, F.Z. Parameter identification of Hammerstein systems containing backlash operators with arbitrary-shape parametric borders. Automatica 2011, 47, 1827–1833. [Google Scholar] [CrossRef]
- Fang, L.; Wang, J.; Zhang, Q. Identification of extended Hammerstein systems with hysteresis-type input nonlinearities described by Preisach model. Nonlinear Dyn. 2015, 79, 1257–1273. [Google Scholar] [CrossRef]
- Zhang, Q.; Wang, Q.; Li, G. Nonlinear modeling and predictive functional control of Hammerstein system with application to the turntable servo system. Mech. Syst. Signal Process. 2016, 72, 383–394. [Google Scholar] [CrossRef]
- Pouliquen, M.; Pigeon, E.; Gehan, O. Identification scheme for Hammerstein output error models with bounded noise. IEEE Trans. Autom. Control 2016, 61, 550–555. [Google Scholar] [CrossRef]
- Ding, F.; Shi, Y.; Chen, T. Auxiliary model-based least-squares identification methods for Hammerstein output-error systems. Syst. Control Lett. 2007, 56, 373–380. [Google Scholar] [CrossRef]
- Filipovic, V.Z. Consistency of the robust recursive Hammerstein model identification algorithm. J. Frankl. Inst. 2015, 352, 1932–1945. [Google Scholar] [CrossRef]
- Gao, X.; Ren, X.; Zhu, C.; Zhang, C. Identification and control for Hammerstein systems with hysteresis non-linearity. IET Control Theory Appl. 2015, 9, 1935–1947. [Google Scholar] [CrossRef]
- Cao, P.; Luo, X. Performance analysis of multi-innovation stochastic Newton recursive algorithms. Digit. Signal Process. 2016, 56, 15–23. [Google Scholar] [CrossRef]
- Ding, F. Complexity, convergence and computational efficiency for system identification algorithms. Control Decis. 2016, 31, 1729–1741. [Google Scholar]
- Ding, F. Several multi-innovation identification methods. Digit. Signal Process. 2010, 20, 1027–1039. [Google Scholar] [CrossRef]
- Shi, Z.; Wang, Y.; Ji, Z. A multi-innovation recursive least squares algorithm with a forgetting factor for Hammerstein CAR systems with backlash. Circuits Syst. Signal Process. 2016, 35, 4271–4289. [Google Scholar] [CrossRef]
- Xiao, Y.; Song, G.; Liao, Y.; Ding, R. Multi-innovation stochastic gradient parameter estimation for input nonlinear controlled autoregressive models. Int. J. Control Autom. Syst. 2012, 10, 639–643. [Google Scholar] [CrossRef]
- Chen, J.; Zhang, Y.; Ding, R. Gradient-based parameter estimation for input nonlinear systems with ARMA noises based on the auxiliary model. Nonlinear Dyn. 2013, 72, 865–871. [Google Scholar] [CrossRef]
- Ma, J.; Xiong, W.; Ding, F.; Alsaedi, A.; Hayat, T. Data filtering based forgetting factor stochastic gradient algorithm for Hammerstein systems with saturation and preload nonlinearities. J. Frankl. Inst. 2016, 353, 4280–4299. [Google Scholar] [CrossRef]
- Li, W.; Shah, S.L.; Xiao, D. Kalman filters in non-uniformly sampled multirate systems: For FDI and beyond. Automatica 2008, 44, 199–208. [Google Scholar] [CrossRef]
- Albertos, P.; Salt, J. Non-uniform sampled-data control of MIMO systems. Ann. Rev. Control 2011, 35, 65–76. [Google Scholar] [CrossRef]
- Ding, F.; Wang, F.F. Recursive least squares identification algorithms for linear-in-parameter systems with missing data. Control Decis. 2016, 31, 2261–2266. [Google Scholar]
- Yang, H.; Xia, Y.; Shi, P. Stabilization of networked control systems with nonuniform random sampling periods. Int. J. Robust Nonlinear Control 2011, 21, 501–526. [Google Scholar] [CrossRef]
- Aibing, Q.; Bin, J.; Chenglin, W.; Zehui, M. Fault estimation and accommodation for networked control systems with nonuniform sampling periods. Int. J. Adapt. Control Signal Process. 2015, 29, 427–442. [Google Scholar] [CrossRef]
- Sheng, J.; Chen, T.; Shah, S.L. Generalized predictive control for non-uniformly sampled systems. J. Process Control 2002, 12, 875–885. [Google Scholar] [CrossRef]
- Khan, S.; Goodall, R.; Dixon, R. Non-uniform sampling strategies for digital control. Int. J. Syst. Sci. 2013, 44, 2234–2254. [Google Scholar] [CrossRef]
- Jing, S.; Pan, T.; Li, Z. Recursive bayesian algorithm with covariance resetting for identification of Box-Jenkins systems with non-uniformly sampled input data. Circuits Syst. Signal Process. 2016, 35, 919–932. [Google Scholar] [CrossRef]
- Xie, L.; Yang, H.; Ding, F. Identification of non-uniformly sampled-data systems with asynchronous input and output data. J. Frankl. Inst. 2017, 354, 1974–1991. [Google Scholar] [CrossRef]
- Li, X.; Ding, R.; Zhou, L. Least-squares-based iterative identification algorithm for Hammerstein nonlinear systems with non-uniform sampling. Int. J. Comput. Math. 2013, 90, 1524–1534. [Google Scholar] [CrossRef]
- Salt, J.; Albertos, P. Model-based multirate controllers design. IEEE Trans. Control Syst. Technol. 2005, 13, 988–997. [Google Scholar] [CrossRef]
- Huang, J.; Shi, Y.; Huang, H.; Li, Z. l2-l∞ filtering for multirate nonlinear sampled-data systems using T-S fuzzy models. Digit. Signal Process. 2013, 23, 418–426. [Google Scholar] [CrossRef]
- Xie, L.; Yang, H.; Ding, F.; Huang, B. Novel model of non-uniformly sampled-data systems based on a time-varying backward shift operator. J. Process Control 2016, 43, 38–52. [Google Scholar] [CrossRef]
- Chang, F.; Luus, R. A noniterative method for identification using Hammerstein model. IEEE Trans. Autom. Control 1971, 16, 464–468. [Google Scholar] [CrossRef]
- Shen, Q.; Ding, F. Least squares identification for Hammerstein multi-input multi-output systems based on the key-term separation technique. Circuits Syst. Signal Process. 2016, 35, 1–14. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhao, Z.; Cui, G. Auxiliary model method for transfer function estimation from noisy input and output data. Appl. Math. Model. 2014, 39, 4257–4265. [Google Scholar] [CrossRef]
- Jin, Q.; Wang, Z.; Liu, X. Auxiliary model-based interval-varying multi-innovation least squares identification for multivariable OE-like systems with scarce measurements. J. Process Control 2015, 35, 154–168. [Google Scholar] [CrossRef]
- Ding, J. Data filtering based recursive and iterative least squares algorithms for parameter estimation of multi-input output systems. Algorithms 2016, 9, 49. [Google Scholar] [CrossRef]
- Bai, E.W. An optimal two-stage identification algorithm for Hammerstein-Wiener nonlinear systems. Automatica 1998, 34, 333–338. [Google Scholar] [CrossRef]
- Wang, X.; Ding, F. Convergence of the auxiliary model-based multi-innovation generalized extended stochastic gradient algorithm for Box-Jenkins systems. Nonlinear Dyn. 2015, 82, 269–280. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| k | 100 | 200 | 500 | 1000 | 2000 | 3000 | 4000 | 5000 | True Values |
|---|---|---|---|---|---|---|---|---|---|
| −0.23798 | −0.23467 | −0.24155 | −0.23676 | −0.32003 | −0.37711 | −0.42344 | −0.46120 | −0.80860 | |
| −0.17253 | −0.15925 | −0.14095 | −0.10136 | −0.07608 | −0.04580 | −0.00265 | 0.02211 | 0.25514 | |
| 0.21247 | 0.28325 | 0.36820 | 0.43435 | 0.54777 | 0.63347 | 0.70653 | 0.76997 | 1.00000 | |
| 0.03019 | 0.01933 | 0.01196 | 0.00916 | 0.00769 | −0.01410 | −0.04420 | −0.08780 | −0.61623 | |
| 0.08793 | 0.10742 | 0.14003 | 0.18442 | 0.23272 | 0.28553 | 0.31263 | 0.32151 | 0.50931 | |
| −0.14144 | −0.17751 | −0.20109 | −0.25406 | −0.32583 | −0.39976 | −0.44355 | −0.49299 | −0.94779 | |
| −0.26469 | −0.24184 | −0.17359 | −0.12188 | −0.07576 | −0.02374 | 0.04034 | 0.07391 | 0.57794 | |
| 0.24088 | 0.32232 | 0.39463 | 0.45898 | 0.57929 | 0.66877 | 0.73108 | 0.77370 | 1.00000 | |
| 0.02779 | 0.05257 | 0.07272 | 0.09047 | 0.11098 | 0.11615 | 0.10811 | 0.09453 | −0.49522 | |
| 0.04644 | 0.04343 | 0.04713 | 0.07480 | 0.12538 | 0.16100 | 0.18916 | 0.22188 | 0.75553 | |
| 1.05391 | 0.96668 | 0.98187 | 0.93895 | 0.80087 | 0.72297 | 0.66712 | 0.63075 | 0.50000 | |
| 1.79633 | 1.68065 | 1.44046 | 1.16009 | 0.82335 | 0.65456 | 0.52589 | 0.45922 | 0.25000 | |
| 103.04890 | 97.41924 | 89.40996 | 80.57154 | 68.94369 | 61.44114 | 55.52206 | 51.00555 |
| k | 100 | 200 | 500 | 1000 | 2000 | 3000 | 4000 | 5000 | True Values |
|---|---|---|---|---|---|---|---|---|---|
| −0.17179 | −0.18574 | −0.31748 | −0.41405 | −0.61777 | −0.71905 | −0.76959 | −0.80135 | −0.80860 | |
| −0.17111 | −0.11012 | −0.05496 | 0.01077 | 0.12643 | 0.17775 | 0.21975 | 0.24397 | 0.25514 | |
| 0.37344 | 0.45616 | 0.62647 | 0.76016 | 0.91687 | 0.95693 | 0.98483 | 0.99692 | 1.00000 | |
| 0.06673 | 0.04317 | 0.02695 | −0.05431 | −0.24467 | −0.39466 | −0.50874 | −0.56748 | −0.61623 | |
| 0.18052 | 0.22395 | 0.27192 | 0.33856 | 0.35650 | 0.39392 | 0.41745 | 0.43668 | 0.50931 | |
| −0.34108 | −0.41100 | −0.47313 | −0.56512 | −0.68070 | −0.77319 | −0.82088 | −0.85964 | −0.94779 | |
| −0.01887 | −0.03044 | 0.07773 | 0.16053 | 0.30682 | 0.37436 | 0.44459 | 0.47782 | 0.57794 | |
| 0.38009 | 0.49836 | 0.59120 | 0.75693 | 0.92872 | 0.97376 | 0.98098 | 0.98525 | 1.00000 | |
| 0.02215 | 0.04295 | 0.06078 | 0.02968 | −0.07356 | −0.20574 | −0.29673 | −0.36568 | −0.49522 | |
| 0.10985 | 0.13310 | 0.18300 | 0.25133 | 0.33733 | 0.43426 | 0.52067 | 0.59753 | 0.75553 | |
| 0.97825 | 0.90595 | 0.80559 | 0.63455 | 0.51789 | 0.50729 | 0.50178 | 0.50388 | 0.50000 | |
| 1.35667 | 1.13733 | 0.73326 | 0.47388 | 0.31951 | 0.27787 | 0.26181 | 0.25438 | 0.25000 | |
| 84.52995 | 75.91772 | 61.64633 | 48.73054 | 32.94076 | 22.45332 | 15.03823 | 10.03271 |
| k | 100 | 200 | 500 | 1000 | 2000 | 3000 | 4000 | 5000 | True Values |
|---|---|---|---|---|---|---|---|---|---|
| −0.21097 | −0.29207 | −0.48337 | −0.62718 | −0.78913 | −0.82242 | −0.82167 | −0.81394 | −0.80860 | |
| −0.09616 | −0.00999 | 0.04310 | 0.14720 | 0.23542 | 0.25631 | 0.25755 | 0.25552 | 0.25514 | |
| 0.46831 | 0.60206 | 0.82476 | 0.92527 | 0.99463 | 0.99562 | 0.99966 | 1.00088 | 1.00000 | |
| 0.05982 | 0.04225 | −0.06860 | −0.27395 | −0.53707 | −0.61472 | −0.62645 | −0.62093 | −0.61623 | |
| 0.27987 | 0.32848 | 0.34589 | 0.38704 | 0.42283 | 0.47864 | 0.49652 | 0.50327 | 0.50931 | |
| −0.42997 | −0.51235 | −0.60352 | −0.72537 | −0.84006 | −0.90571 | −0.93254 | −0.94364 | −0.94779 | |
| −0.00011 | 0.04270 | 0.21788 | 0.32975 | 0.47520 | 0.53405 | 0.56383 | 0.57217 | 0.57794 | |
| 0.44256 | 0.61696 | 0.76526 | 0.92836 | 1.00028 | 0.99858 | 0.99669 | 1.00004 | 1.00000 | |
| 0.01971 | 0.05871 | 0.01162 | −0.14602 | −0.33453 | −0.42806 | −0.46968 | −0.48801 | −0.49522 | |
| 0.11625 | 0.16567 | 0.24897 | 0.36557 | 0.55820 | 0.68047 | 0.73284 | 0.75125 | 0.75553 | |
| 0.88043 | 0.76552 | 0.64129 | 0.52932 | 0.49418 | 0.49855 | 0.50087 | 0.49915 | 0.50000 | |
| 1.04485 | 0.79819 | 0.45534 | 0.30318 | 0.25542 | 0.25328 | 0.25163 | 0.25057 | 0.25000 | |
| 73.56646 | 62.33004 | 45.43354 | 29.28325 | 12.29280 | 4.72652 | 1.75023 | 0.55900 |
| Parameters | True Values | |||
|---|---|---|---|---|
| −0.80860 | ||||
| 0.25514 | ||||
| 1.00000 | ||||
| −0.61623 | ||||
| 0.50931 | ||||
| −0.94779 | ||||
| 0.57794 | ||||
| 1.00000 | ||||
| −0.49522 | ||||
| 0.75553 | ||||
| 0.50000 | ||||
| 0.25000 |
| Parameters | True Values | |||
|---|---|---|---|---|
| −0.80860 | ||||
| 0.25514 | ||||
| 1.00000 | ||||
| −0.61623 | ||||
| 0.50931 | ||||
| −0.94779 | ||||
| 0.57794 | ||||
| 1.00000 | ||||
| −0.49522 | ||||
| 0.75553 | ||||
| 0.50000 | ||||
| 0.25000 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, L.; Yang, H. Auxiliary Model Based Multi-Innovation Stochastic Gradient Identification Algorithm for Periodically Non-Uniformly Sampled-Data Hammerstein Systems. Algorithms 2017, 10, 84. https://doi.org/10.3390/a10030084
Xie L, Yang H. Auxiliary Model Based Multi-Innovation Stochastic Gradient Identification Algorithm for Periodically Non-Uniformly Sampled-Data Hammerstein Systems. Algorithms. 2017; 10(3):84. https://doi.org/10.3390/a10030084
Chicago/Turabian StyleXie, Li, and Huizhong Yang. 2017. "Auxiliary Model Based Multi-Innovation Stochastic Gradient Identification Algorithm for Periodically Non-Uniformly Sampled-Data Hammerstein Systems" Algorithms 10, no. 3: 84. https://doi.org/10.3390/a10030084
APA StyleXie, L., & Yang, H. (2017). Auxiliary Model Based Multi-Innovation Stochastic Gradient Identification Algorithm for Periodically Non-Uniformly Sampled-Data Hammerstein Systems. Algorithms, 10(3), 84. https://doi.org/10.3390/a10030084