1. Introduction
In the past two decades, the brushless direct current motor has played a vital role in industrial development. These motors are widely used in industrial applications because of their better architecture that is quite suitable for many critical tasks [
1,
2]. The rapid development of BLDC motors in the automobile industry, based on hybrid drives that require higher efficiency permanent magnet motor (PMM) drives, was the establishment of awareness in BLDC motors [
3,
4]. These motors have a linear relationship between torque, current, and voltage, and they operate on a revolution per minute (RPM) basis.
A BLDC motor has the same speed torque curve as a conventional permanent magnet DC motor. However, it has different advantages, such as a small volume, a quick dynamic response, greater power density, better efficiency, and it can be directly associated with the mechanical load [
5,
6,
7]. The BLDC motor does not use brushes, and it has extended operating life without noise. Moreover, it has Permanent Magnet, which is why its ratio is quite a bit higher between torque and motor size and is quite suitable for that application where weight and space are significant. It has a variety of speed ranges, better torque and speed characteristics as compared to other motors, and it is more suitable for applications such as a gimbal platform. However, in this research, the BLDC motor is chosen due to its low inertia in the rotor that helps to improve its acceleration time when it is operating for a short period of time [
8].
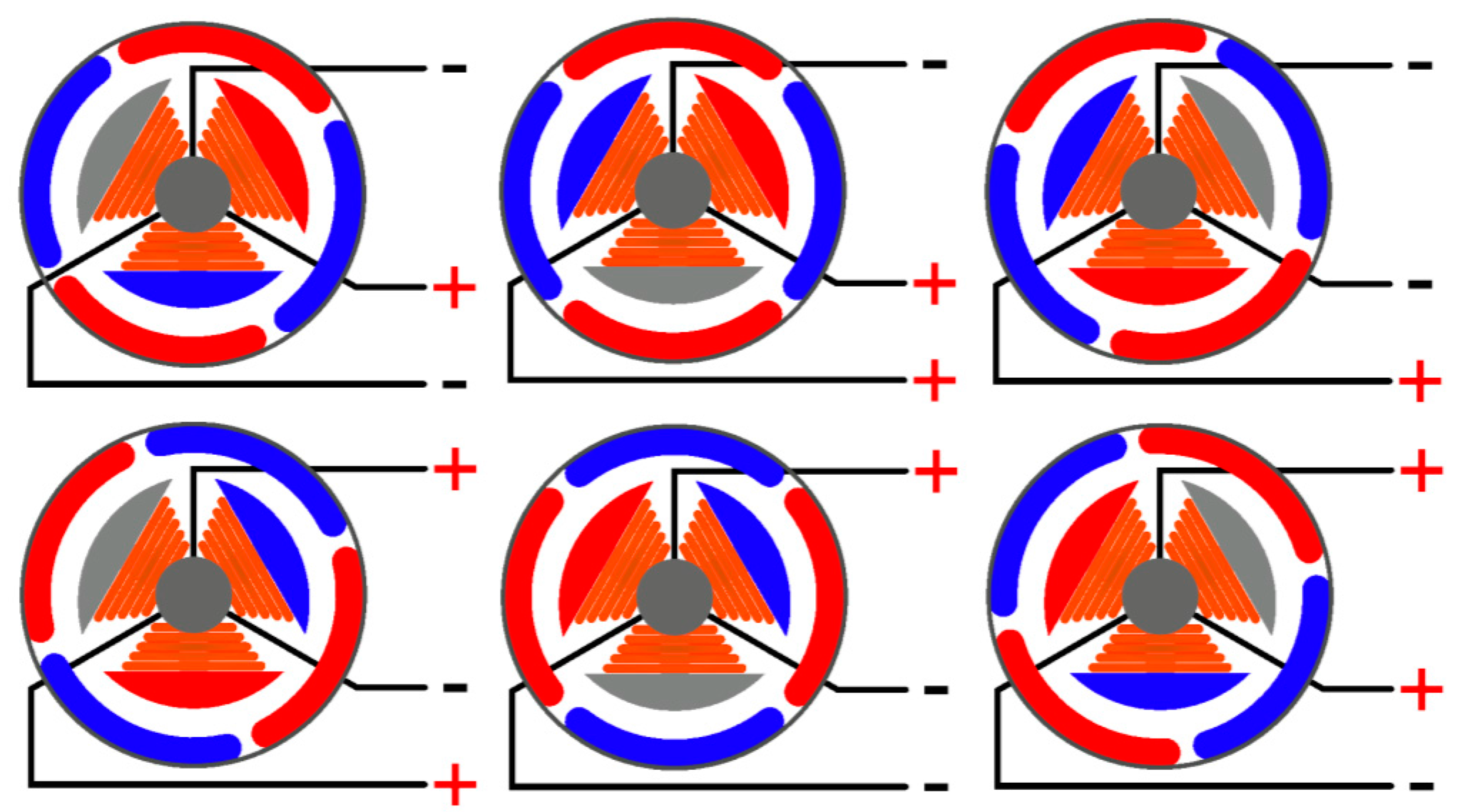
In this research, a BLDC motor is selected as compared to a DC servo motor because it has many problems, such as maintenance and durability issues and higher noise. On the other hand, one of the major drawbacks of a BLDC motor is that its control is very difficult compared with a DC servo motor. For the real time operating scenario of a BLDC motor, the number of poles and coils plays an important role to control the motor. If the number of poles and coils are greater, the motor will be more responsive to its input. However, this research uses a three-phase BLDC motor along with 14 poles and 12 coils because using BLDC motors with fewer coils and poles will reduce their performance.
Previously, different control algorithms have been used to control the position of three-phase BLDC motors, including the Proportional Integral controller [
8], the variable structure controller [
9,
10,
11], model predictive control [
12], and model reference adaptive control [
13].
However, in this research, the proposed hybrid controller is a combination of discrete time sliding mode control with model free adaptive control to control the position of a three-phase BLDC motor, since MFAC is the modest form of a robust control scheme with less mathematical calculations. The nonlinear behavior of the system is linearized by using compact form dynamic linearization (CFDL) and partial form dynamic linearization (PFDL) [
14,
15,
16,
17]. Previously, SMC-based algorithms used a pseudo partial derivative (PPD) to linearize the system. The proposed control algorithm compared with the traditional proportional integral derivative, MFAC, MFLAC and model free adaptive based sliding mode control (MFA-SMC) methods. The above algorithms are applied to control the three-phase BLDC motor successfully, and their performance analysis is verified by using simulations on MATLAB. The simulated results show that our proposed controller exhibits greater robustness and more accurate tracking.
In this manuscript, the position control of a BLDC motor is considered by using a data-driven MFA-based controller. The major advancements of this manuscript are: (1) the description of control system modeling and preliminary information to validate the model-based control design. Later on, this model is used to validate data-driven control techniques; (2) the characteristics of MFAC are combined with an SMC algorithm and used to control the position of a three-phase BLDC motor by MATLAB (Simulink)-based simulations; (3) a MFA-SMC algorithm based on PFDL for a discrete time nonlinear system. The proposed method utilizes a PPD estimation of the past time and a transformed, model-based SMC algorithm in the data-driven control method; (4) the comparative analysis of the proposed system with the designed hybrid controller, and the results show that it has better performance; and (5) at the end, the PID, CFDL-based MFAC, CFDL-based MFLAC, and PFDL-based MFA-SMC algorithms are compared to check the performance analysis, which is verified by using Simulink in MATLAB platform.
This manuscript is structured as follows. In
Section 1, the introduction is presented.
Section 2 explains the general theory and structure of a BLDC motor and Controller design using model-based PID techniques.
Section 3 explains data-driven control system design techniques, such as MFAC, MFLAC, and MFA-SMC, with application to the position control of a BLDC motor.
Section 4 explains the experimental results and comparative analysis. Lastly,
Section 5 concludes the overall manuscript.
3. DDC Control System Design
3.1. Design of MFAC
Consider the Discrete time nonlinear system having Single Input and Single Output (SISO);
where
are the input and output, respectively, at time instant
,
and
is the unknown order, and
is an unknown time-varying nonlinear function. Detailed information on the succeeding assumptions is given in reference [
19].
Assumption 1:
The proposed system model is observable and controllable, and a bounded control input signal should exist that converts the system response identically to the expected output for the expected bounded system output signal .
Assumption 2:
is a Partial derivative and is continuous with respect to the control input .
Assumption 3:
The general Lipschitz condition should be satisfied by the proposed system. where , and positive constant .
Nonlinearity is present in the system, which restricts the rate of change of the system.
The purpose of control is to design an appropriate control input to make the system output . is introduced into the criterion function where the system is to linearize in an acceptable range.
The CFDL data model of the control system is described as
The system should satisfy the Assumptions 1–3 for the CFDL method. First, the system is a continuous moving system whose dynamics satisfy the smoothness condition. Second, a bounded change of system input must cause a bounded change of the system when the control input is not out of the permitted range, namely, that the generalized Lipschitz condition is satisfied.
The generalized PPD estimation and MFAC control law can be written as,
where
are the step-size constants,
is a positive small number,
and
are weighting factors, and
and
are the initial values.
The sampling instant
values are too small now considering
that is a time-varying parameter and can be ignored by
. The adaptive based controller is proposed by the integration of Equations (10), (12) and (13). By combining these equations, it will make the Equation (14).
The parameter estimation error is written as
. The PPD of the proposed system is
, and it is not used in practice. So, by applying
rather than the actual value of
, the system’s past value is
and the parameter estimations are as follows:
Moreover, Equation (14) becomes as follows:
λ is a vital regulating parameter for the MFAC method. The numerical simulation and theoretical analysis confirms that the suitable value of
λ will guarantee the stability of the proposed system. The small value of the weighting factor means a lower rise time. More features regarding this parameter are shown in [
19,
20], respectively.
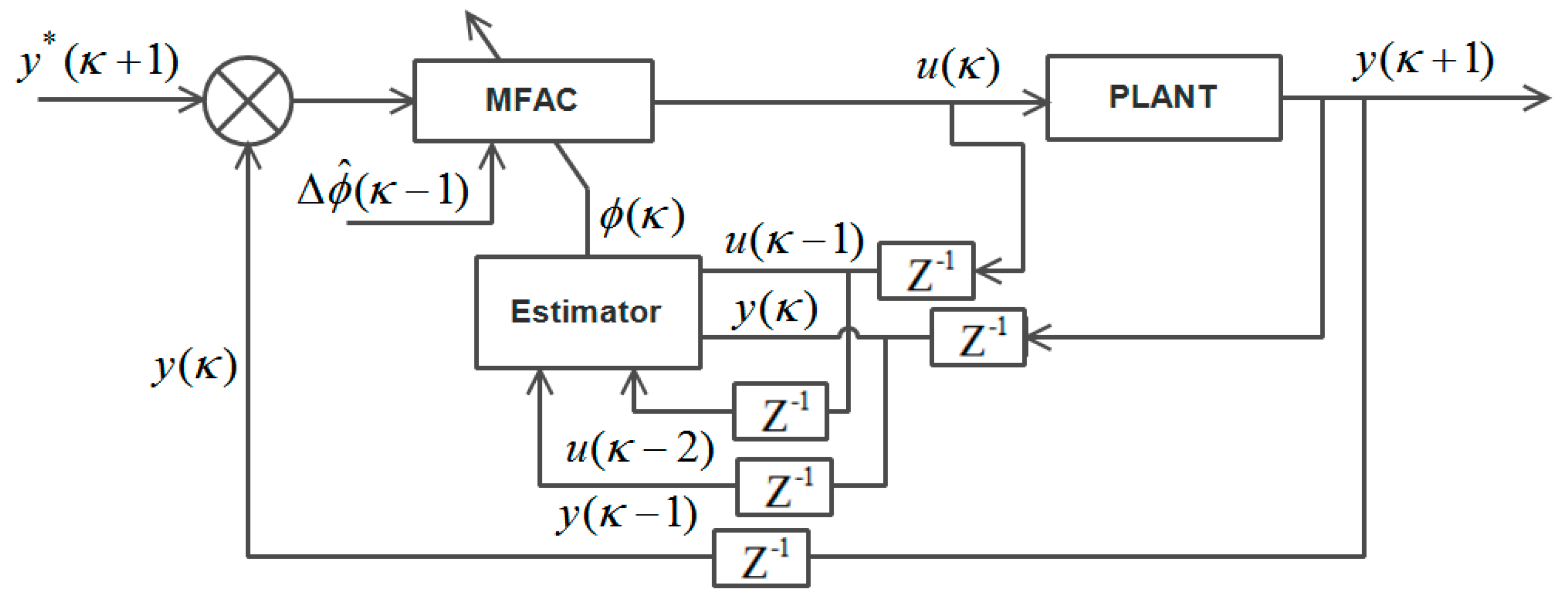
The simulated results show that the appropriate value of
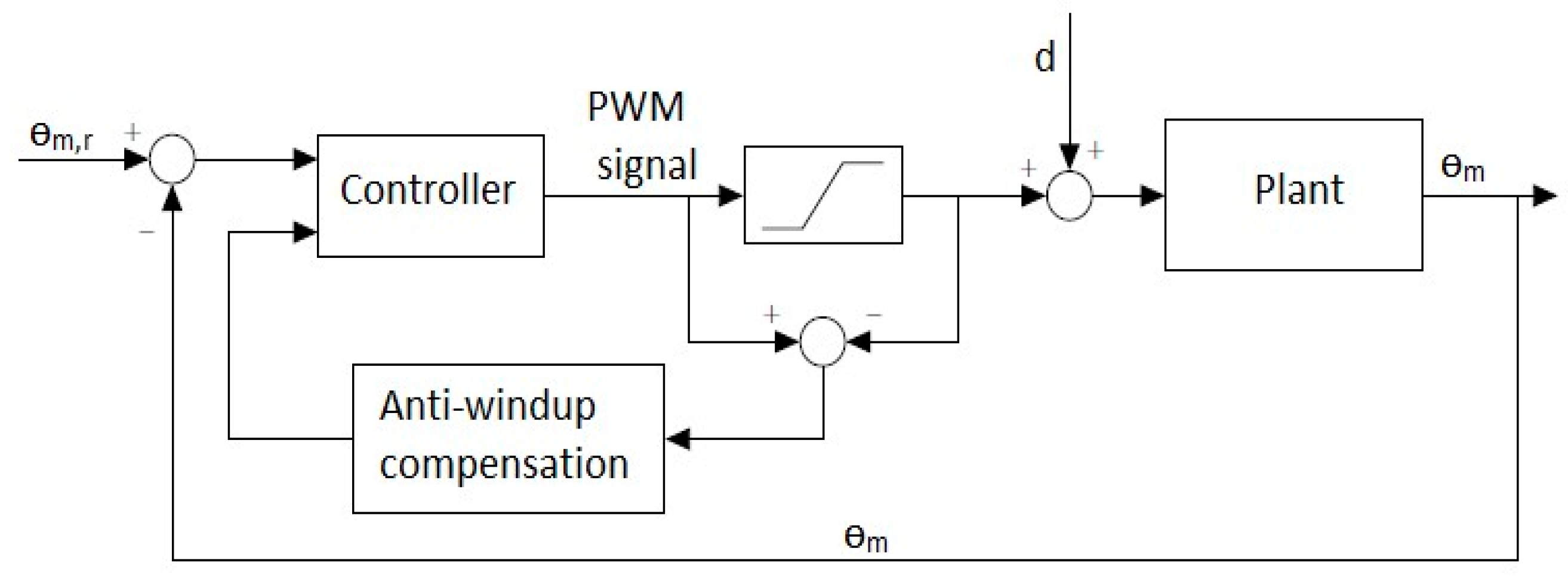
that can enhance the general performance of the control system. The main block diagram of MFC is present in
Figure 13.
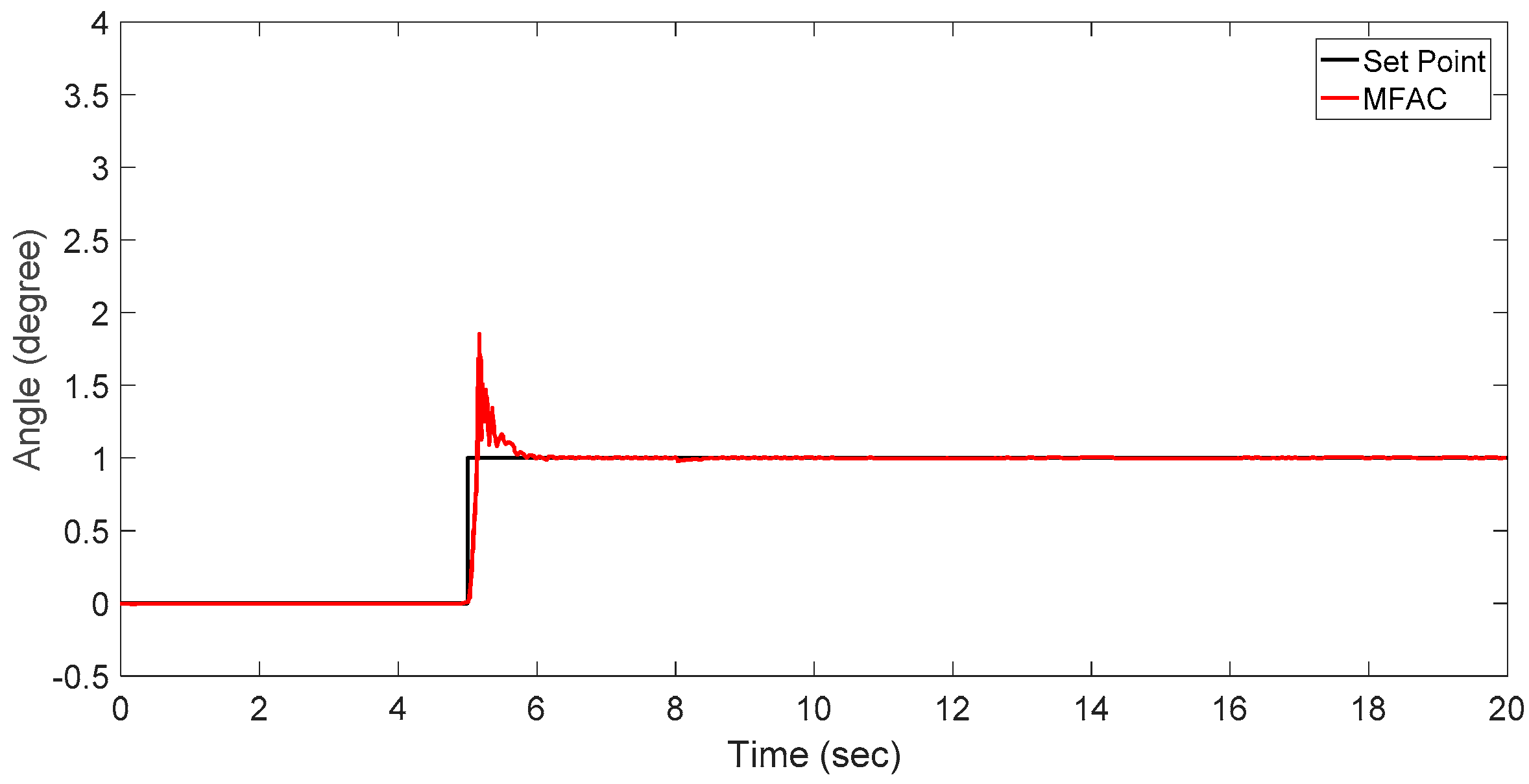
By selecting appropriate parameter, the following result is obtained using the MFAC scheme.
Figure 14 shows the response of the BLDC motor using MFAC. It can be seen that the result is better than the traditional PID method. The overshoot value and settling time is reduced but still needs improvement.
3.2. Design of MFLAC Response
Consider the general discrete time single input, single output (SISO) nonlinear system in Equation (8). The system should satisfy the assumptions in
Section 3.1 for the CFDL method.
The basic theory of and stability criteria for MFLAC are present in reference [
21]. By using the CFDL scheme, the control algorithm for MFLAC based on a weighted one-step control input criterion function is as follows:
where the weighting function is
, and
is the criterion function. The introduction of
will overcome the deficiencies of the controller.
The general MFAC control law is obtained as follows:
The present approaches for PPD estimation introduce a new parameter estimation criterion as follows:
In Equation (18), the parameter
is used to adjust the rate of change of the parameter estimation. From Equation (18), we can get the parameter estimation algorithm in Equation (19):
where
is a positive weighting constant,
is a step size constant series,
,
is the initial estimation information of
, and
is a positive constant.
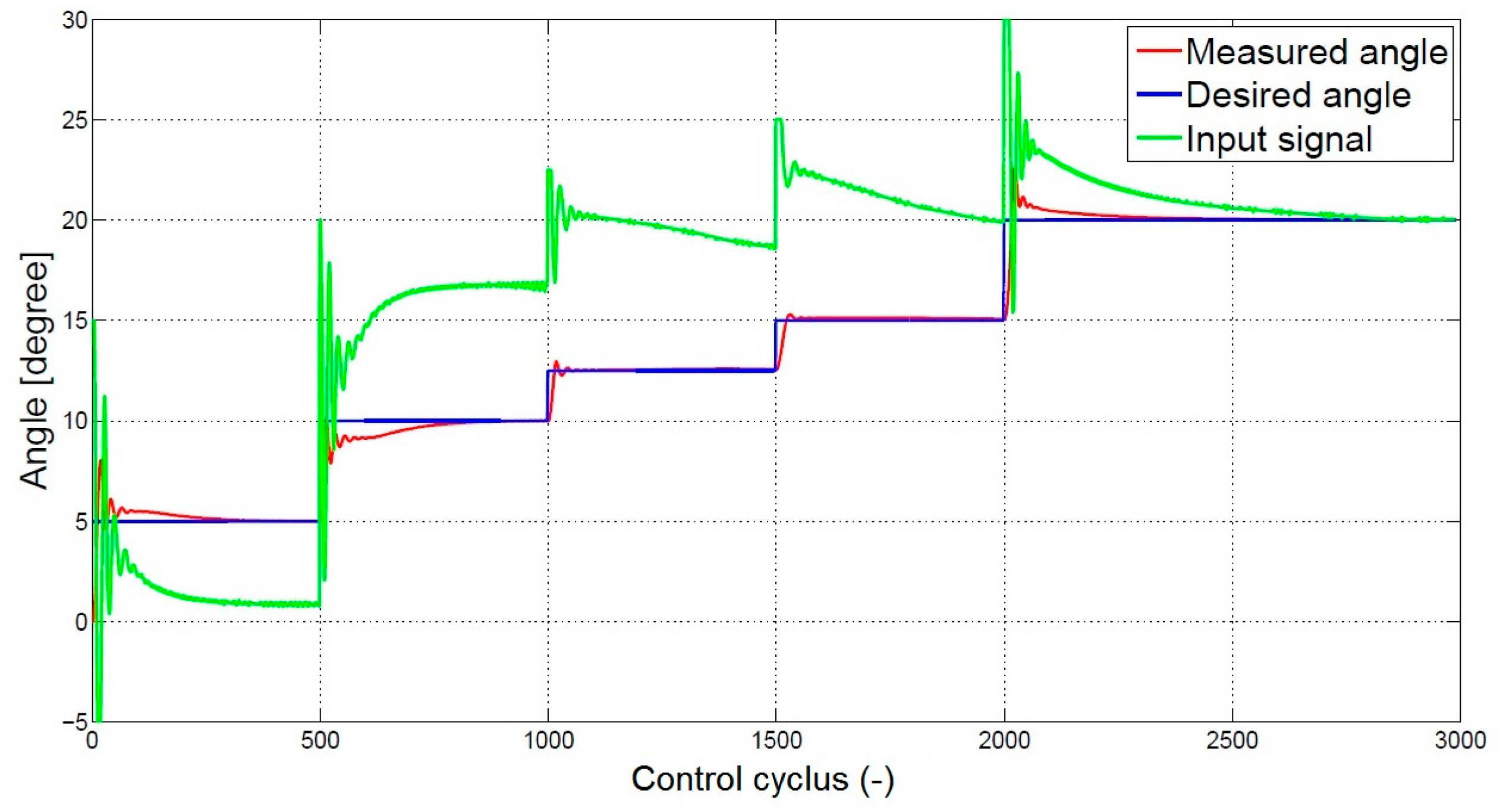
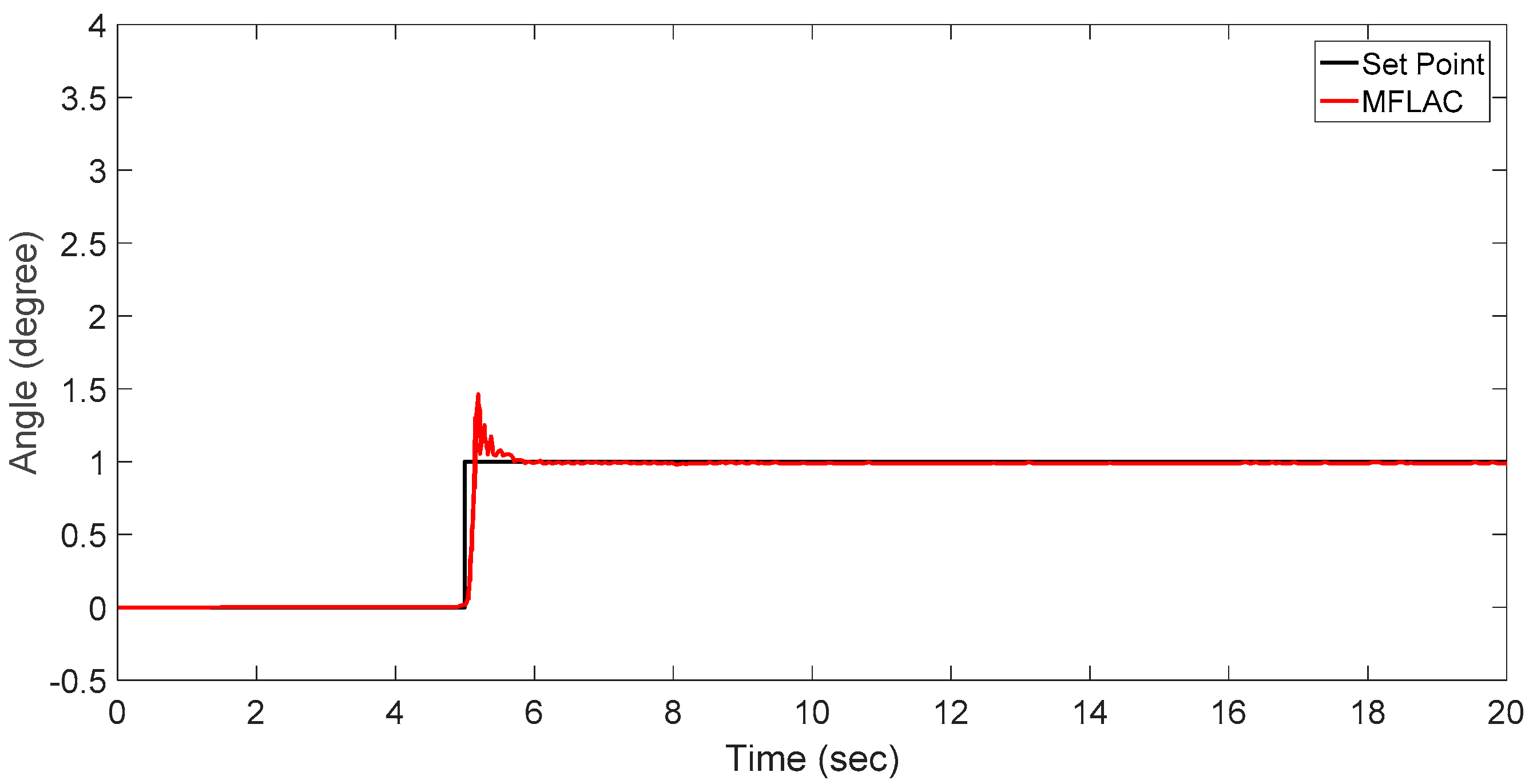
By selecting appropriate parameter, the following result is obtained using the MFLAC scheme.
Figure 15 shows the response of the BLDC Motor using MFLAC. It can be seen that the result is better than the traditional PID and MFAC methods. The overshoot value and settling time is reduced.
3.3. Design of Data-Driven SMC
Consider the general discrete time single input, single output (SISO) nonlinear system in Equation (8). The system should satisfy the assumptions in
Section 3.1 for the PFDL method. The basic theory and a stability analysis of MFA-SMC is present in Reference [
19].
The discrete sliding mode function is given below:
where
c must satisfy the Hurwitz condition
. Additionally, the tracking error is
, which is well-defined as:
where
is the desired tracking trajectory, and
is the system output. By using the discrete exponential reaching law,
From Equations (21) and (23), the equivalent derived equation is:
By using Equation (24), the tracking error becomes
Solving Equations (15) and (25) produces the following result:
Combining
. Put the value of
, and then Equations (21) and (26) establish the following control law:
where
.
Since
is linear convergence, a slow varying parameter may not be able to satisfy the necessity of the controlled system; therefore, Equation (27) can be improved in the following expression:
where
Equation (27) is the MFA-based SMC control law that converges exponentially and will result in a reduction of time and will not cause problems with stability, where is the weighting factor, is the step sequence, and . Solving Equations (21) and (27) results in stable polynomials that range from .
An analysis shows that is quadratic convergence and that the and values are present in the control law; thus, the MFA-based adaptive SMC is greatly improved. It can be seen that Equation (27) has a discontinuous function. This function will establish a high frequency chattering at the sliding mode surface. This high frequency will reduce the performance of the control system, and cannot be applied to an actual control system. To eliminate the high frequency chattering, replace with the function in Equation (27). By replacing the above function, it will convert the discontinuous function of the continuous signal that will result in a reduction of the chattering effect.
The new control algorithm becomes the following equation:
where
.
Integrating Equations (12) and (29) will result in the MFA-based SMC control algorithm. It is observed from the above equation that the MFA-SMC controller design uses a PPD value and only uses the input/output information about the system.
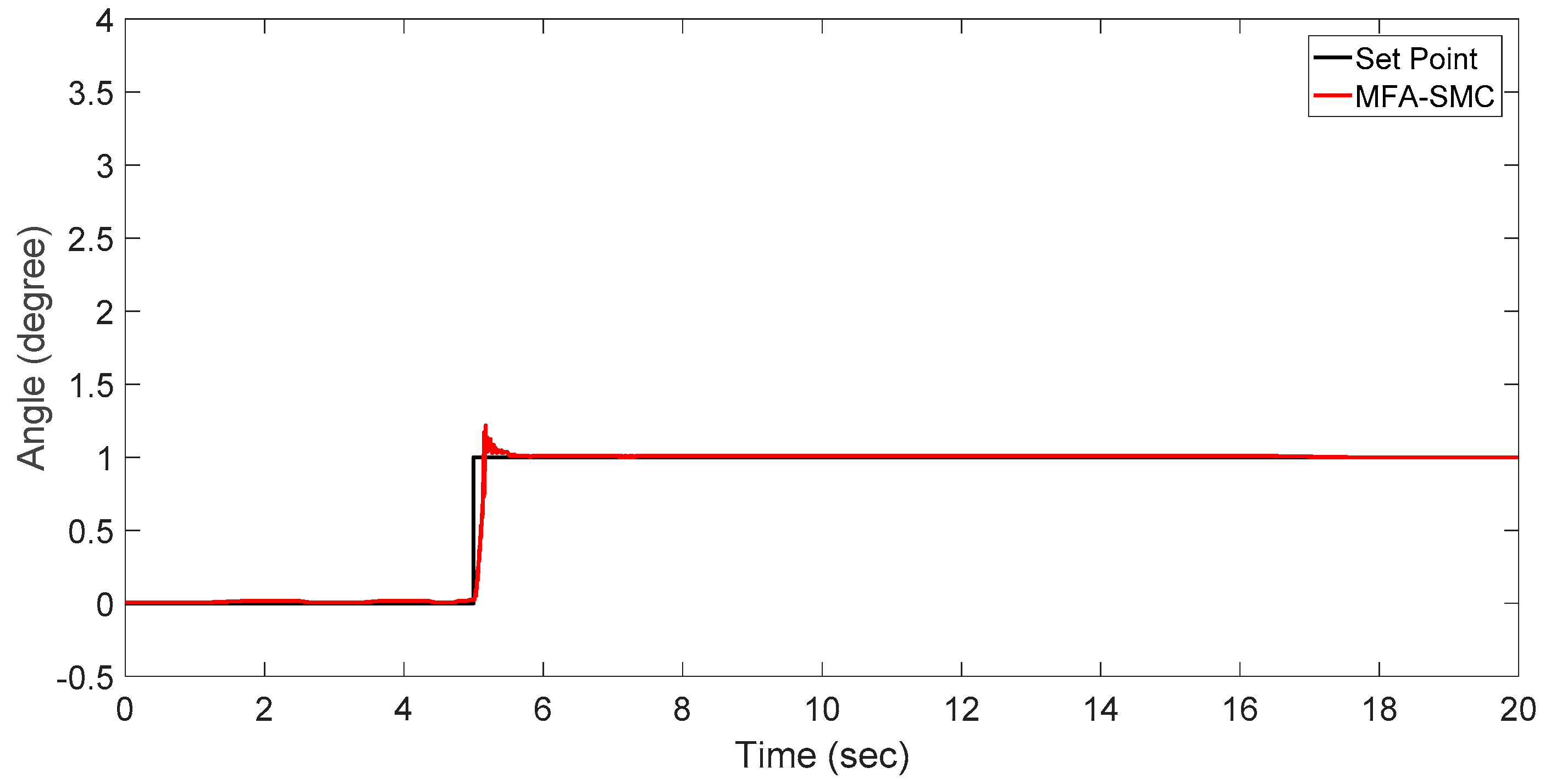
By selecting an appropriate parameter, the following result is obtained using the MFAC-SMC scheme.
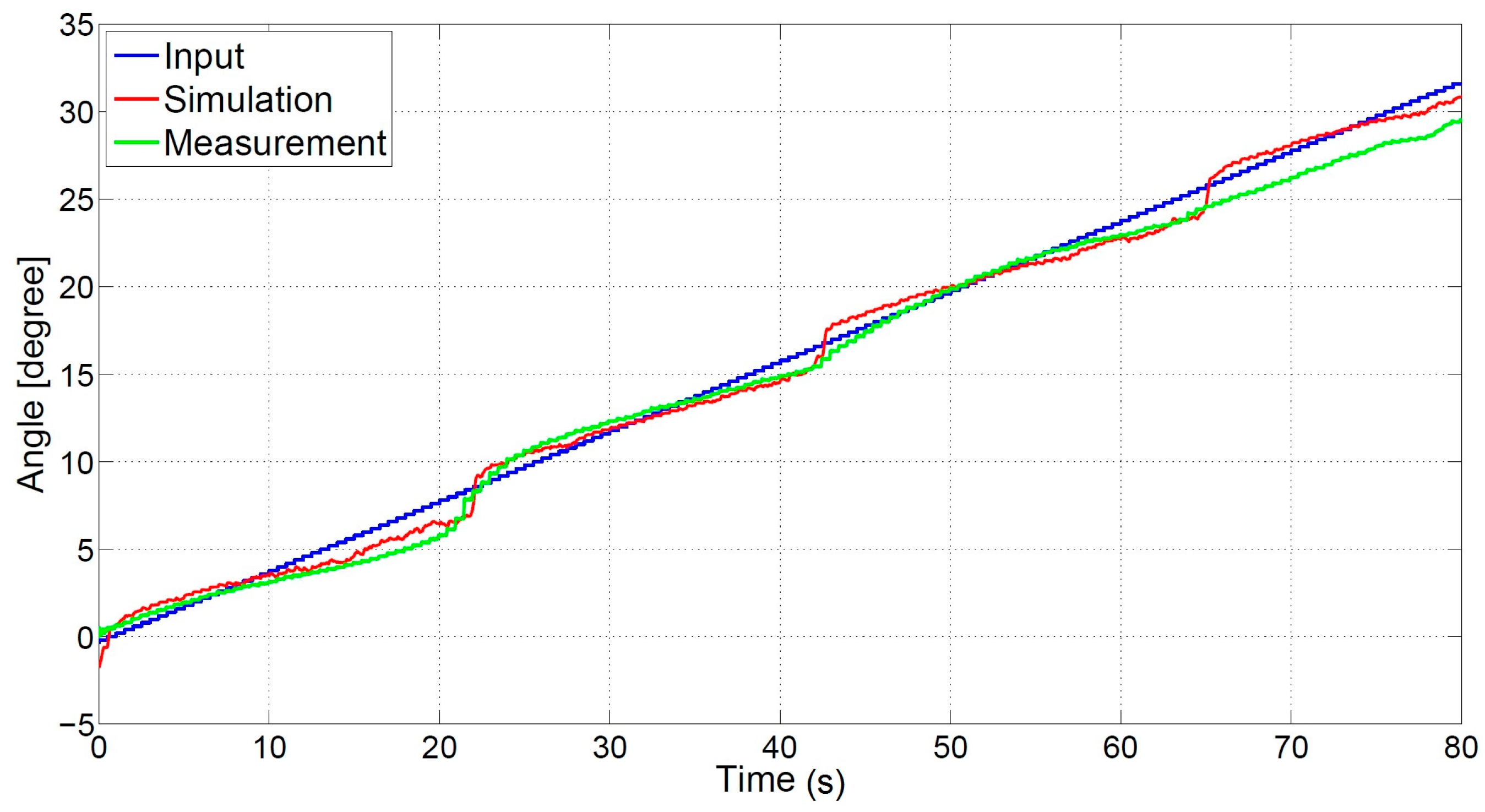
Figure 16 shows the response of the BLDC motor using MFA-SMC. It can be seen that the MFA-SMC result in
Figure 16 is better than the PID and MFAC methods. The overshoot value and settling time is greatly reduced. The advantages of model-based SMC combined with data-driven MFA are useful and have a great impact on performance.
4. Simulation Results and Analysis
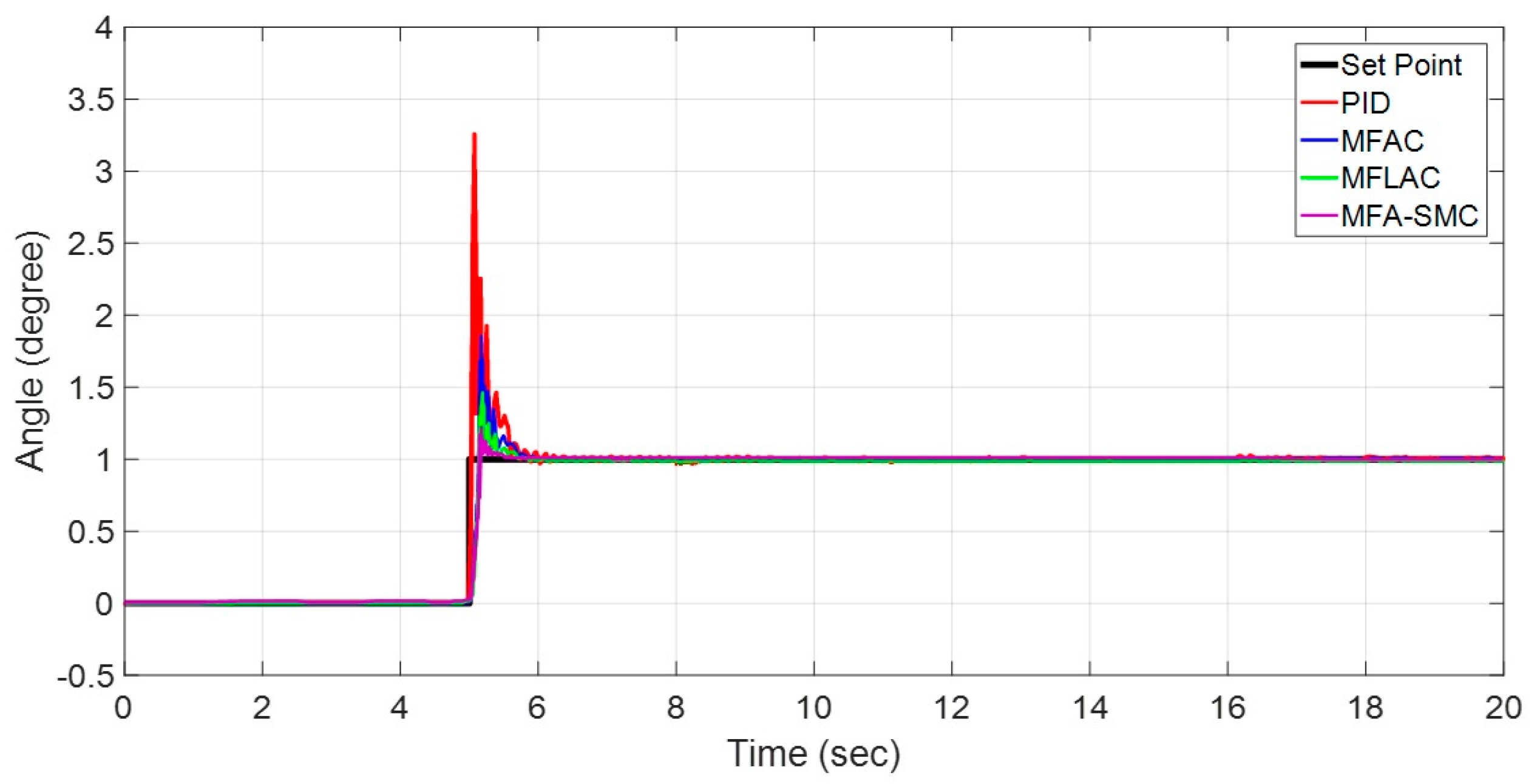
This section discusses the performance analysis between the PID, MFAC, MFLAC, and MFA-SMC schemes.
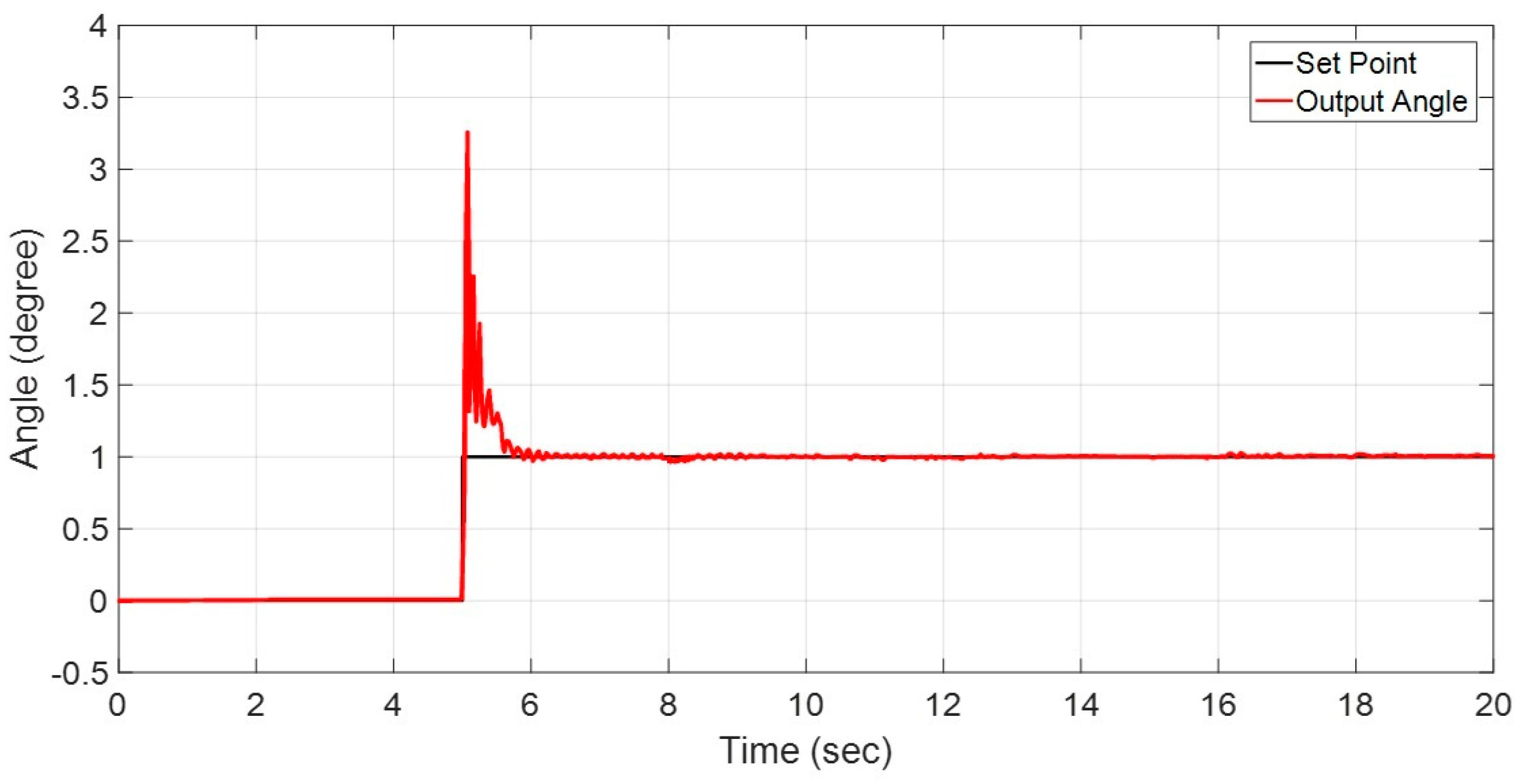
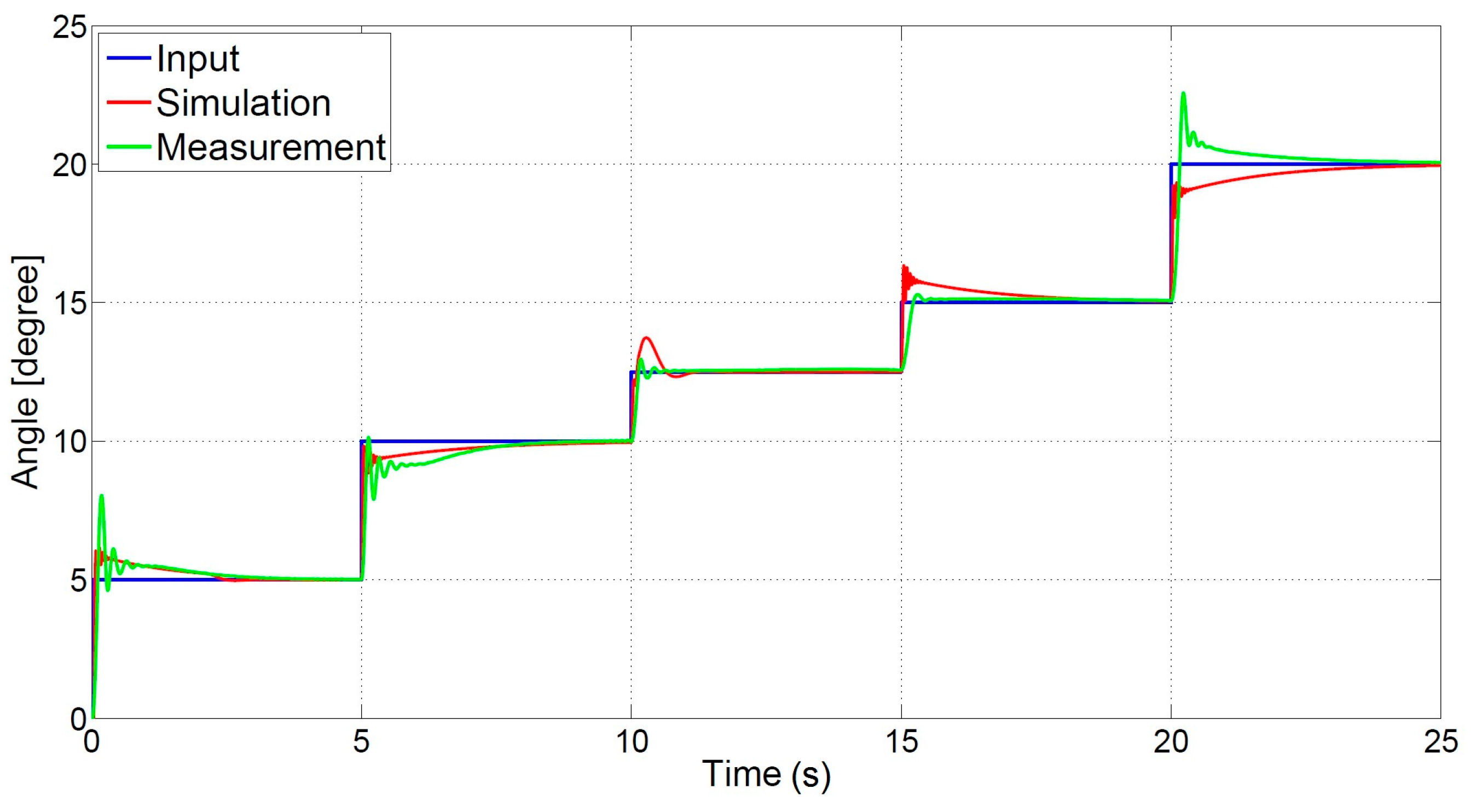
Figure 17 shows the step response of the BLDC motor.
Table 2 summarizes the performance analysis of the different control algorithms.
Table 2 shows that Conventional PID has a Maximum Overshoot of 3.26, a settling time of 1.251, and a rise time of 0.021. Similarly, MFAC has a Maximum Overshoot of 1.85, a settling time of 0.822, and a rise time of 0.134, and it is better than conventional PID. In addition, MFLAC has a Maximum Overshoot of 1.46, a settling time of 0.691, and a rise time of 0.137. The MFLAC result is much better than PID and MFAC. However, the proposed MFA-based SMC control is greatly improved, with a Maximum Overshoot of 1.21, a settling time of 0.492, and a rise time of 0.146. Although there is only a slight improvement in the rise time, the overshoot and settling time is greatly improved and is better than PID, MFAC, and MFLAC.
SMC has great significance in the theoretical research field. Nowadays, it is becoming a serious source of solutions to industrial problems. Its potential is proscribed simply by the artistic ability of the individuals working in process control. Thus, the expectation for SMC’s application in the processing industries is huge. The primary benefits of SMC are its invariance and quality properties, and that it can deal with bounded modelling uncertainties and bounded disturbances both in linear and nonlinear systems.
Model-Based SMC requires a modelling process, which is expensive and time consuming. To eliminate the modelling process, data-driven SMC is proposed with application to the position control of a three-phase BLDC motor that only depends on the input/output information of the system. The simulation result shows that the overall performance of the three-phase BLDC motor is significantly improved. Moreover, the step response analysis shows that by using MFA-SMC, the maximum overshoot and settling time has greatly reduced, from 3.26 to 1.20 and 1.251 to 0.492, respectively. The proposed MFA-SMC algorithm can achieve better position control and stability over the traditional PID, MFA, and MFLAC methods.
5. Conclusions
In this article, a data–driven MFA-based SMC is used for the position control of a BLDC motor. Moreover, an estimation algorithm and control law are explained for MFA, MFAC, and MFA-SMC algorithms. The proposed control algorithm uses the past-time PPD value, and the necessity of a complex mathematical modeling process is not necessary. The simulation results show that the proposed MFA-based SMC significantly improves position tracking performance and robustness. Moreover, it delivers a concrete theoretical significance by offering a significant enhancement on the basic DDC Algorithm. Moreover, a step response analysis shows that by using MFA-based SMC, the maximum overshoot and settling time has greatly reduced from 3.26 to 1.20 and from 1.251 to 0.492, respectively. A comparative analysis of the simulated results verifies that the proposed MFA-SMC algorithm can achieve better position control and stability over the traditional PID, MFA, and MFLAC methods. The simulation results prove a significant improvement in the performance of the three-phase BLDC motor.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}