Comparative Study in Fuzzy Controller Optimization Using Bee Colony, Differential Evolution, and Harmony Search Algorithms

 ,
,  ,
, 

Abstract
:1. Introduction
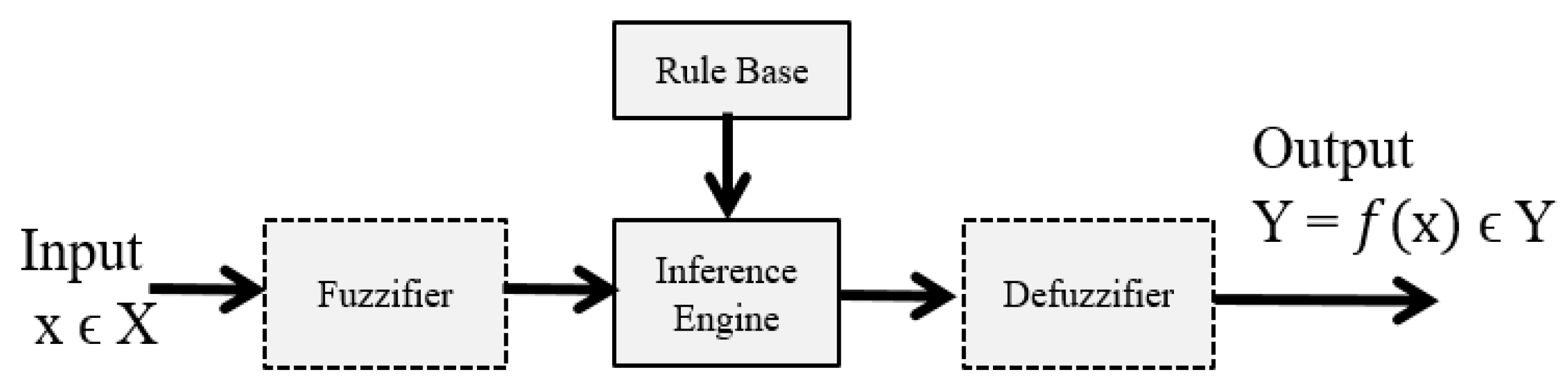
2. Fuzzy Logic Systems
3. Benchmark Problems
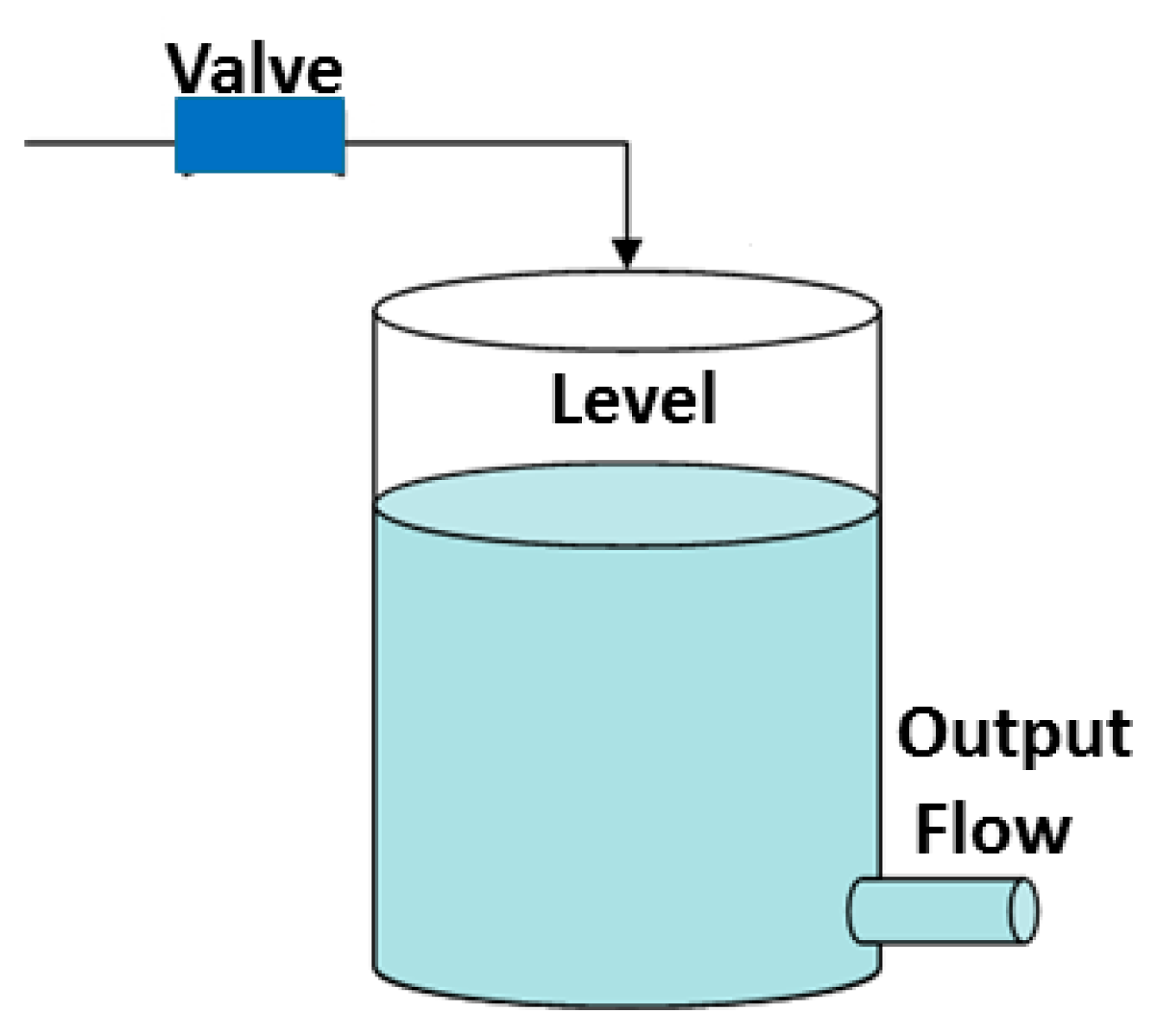
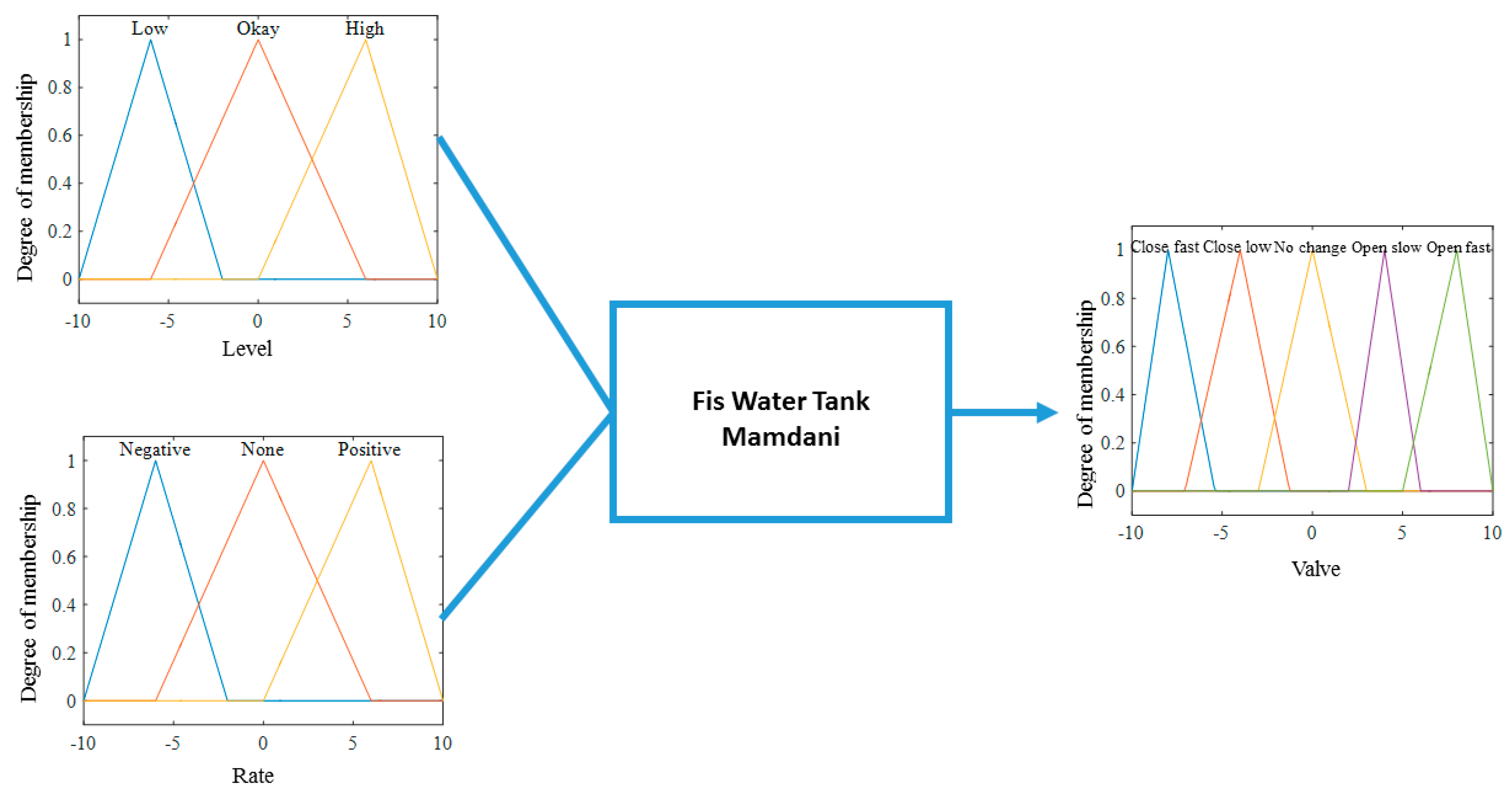
3.1. Water Tank Control Problem
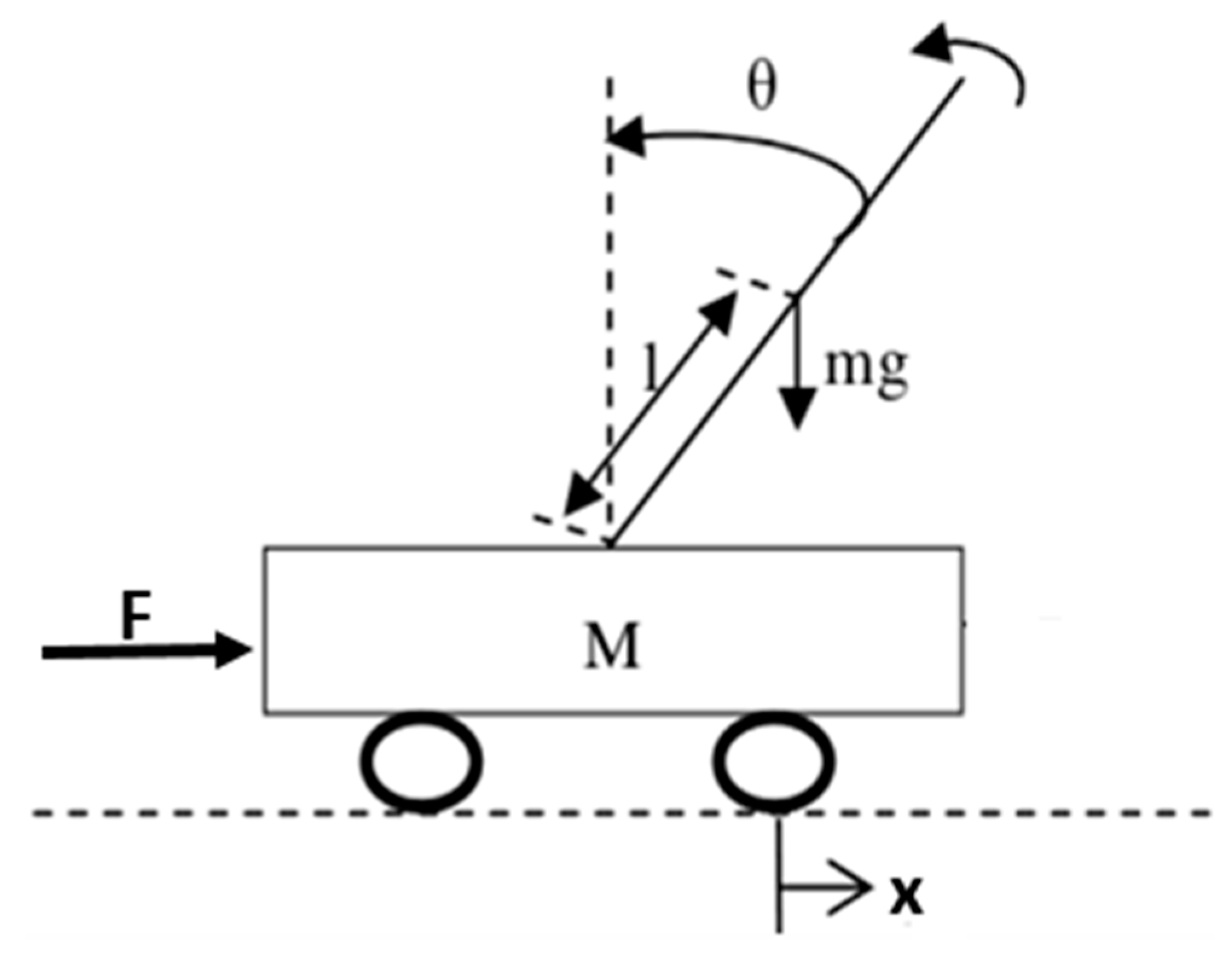
3.2. Control of an Inverted Pendulum on a Cart
4. Proposed Fuzzy Algorithms
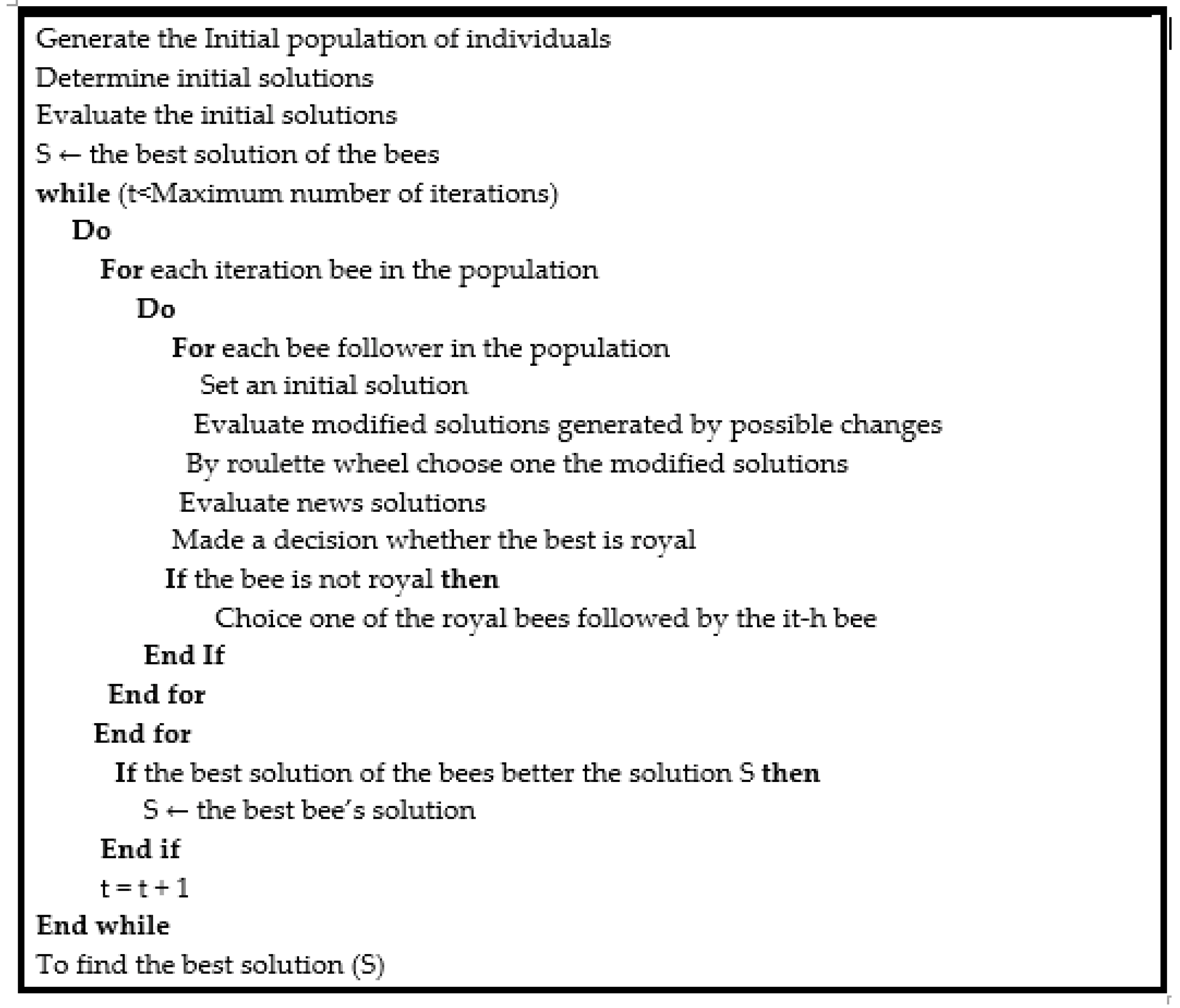
4.1. Bee Colony Optimization Algorithm
4.1.1. Original Bee Colony Optimization Algorithm (BCO)
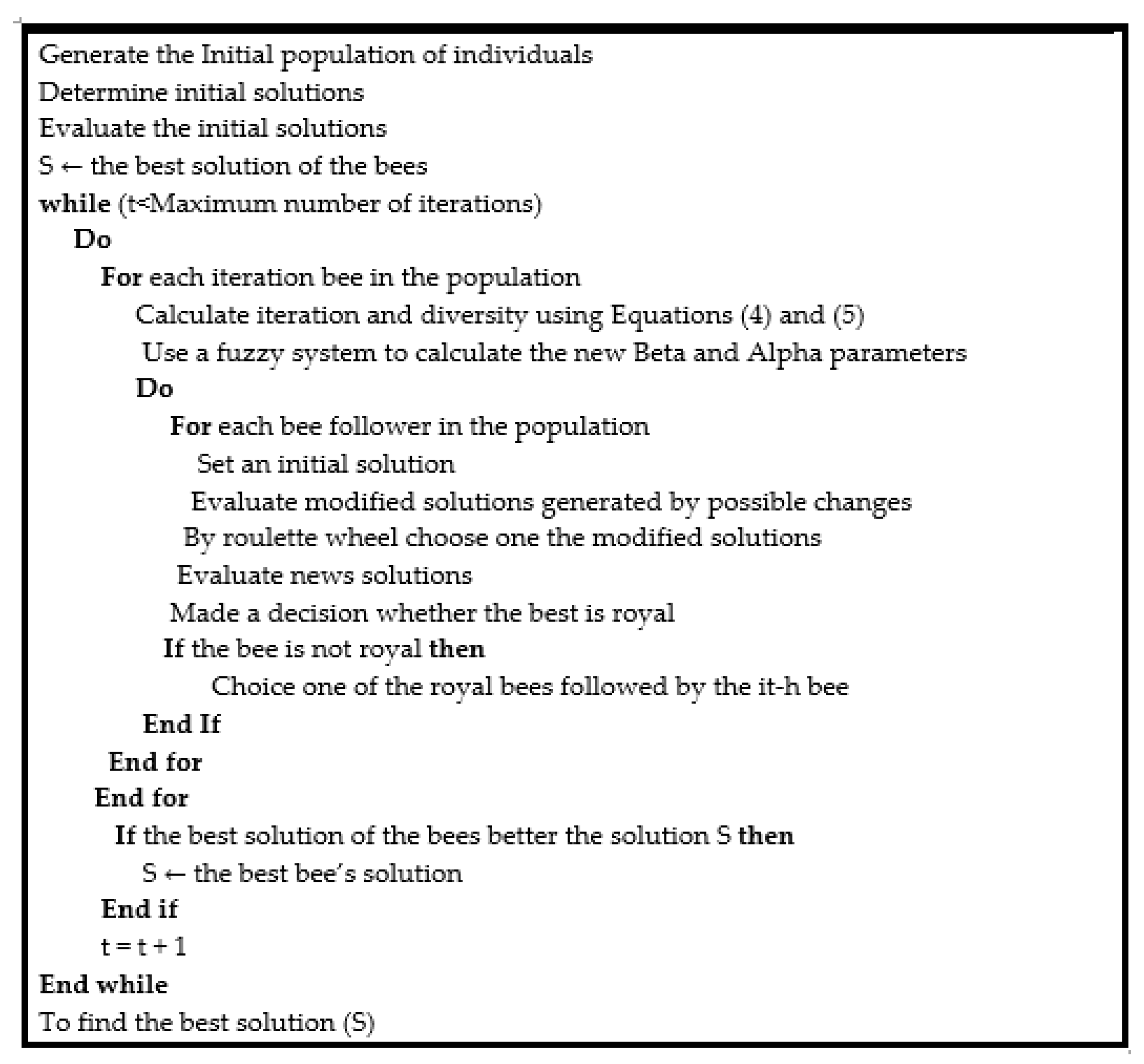
4.1.2. Fuzzy Bee Colony Optimization Algorithm (FBCO)
4.2. Differential Evolution Algorithm
4.2.1. Differential Evolution Algorithm
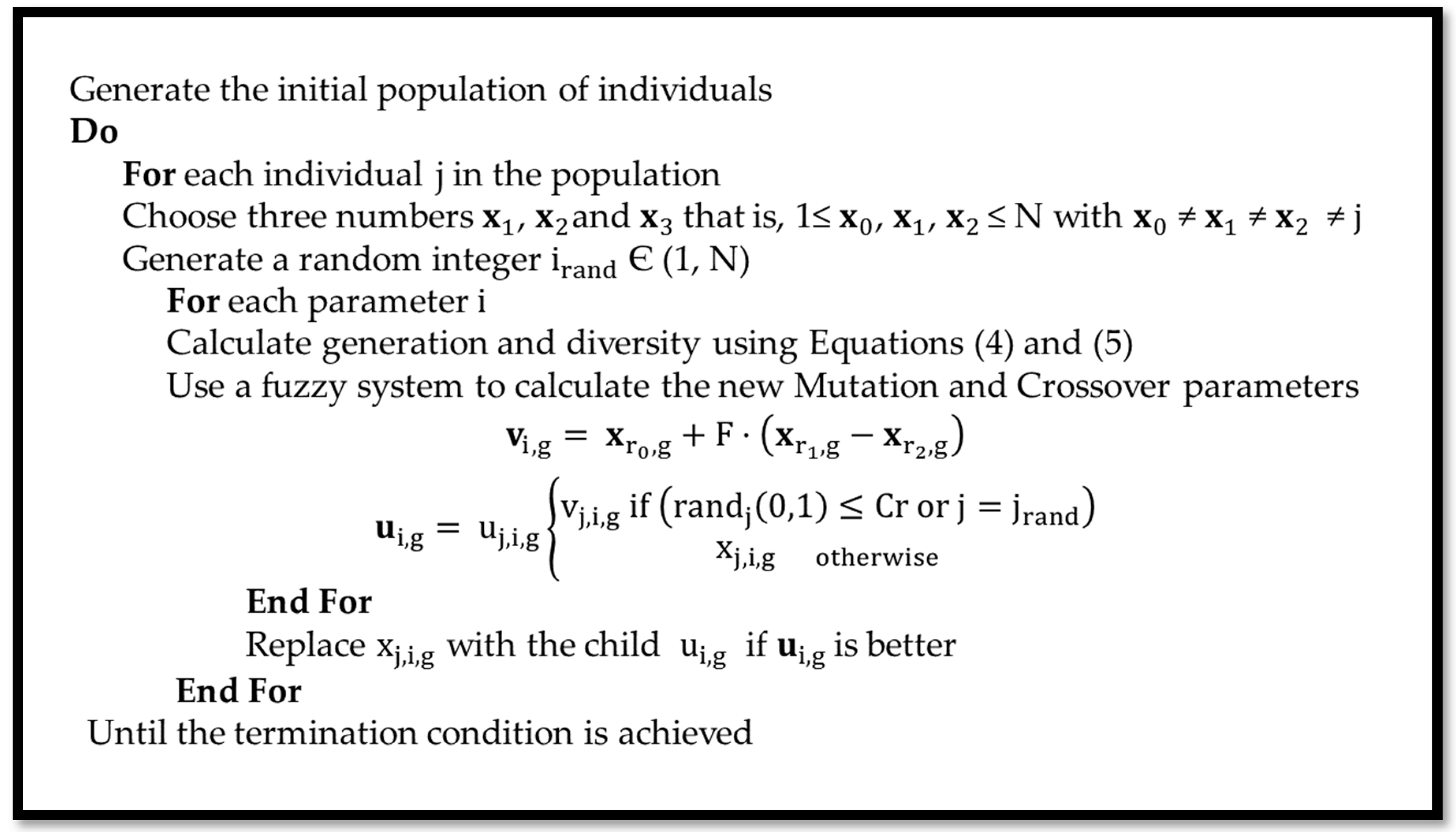
4.2.2. Fuzzy Differential Evolution Algorithm (FDE)
4.3. Harmony Search Algorithm
4.3.1. Original Harmony Search Algorithm (HS)
4.3.2. Fuzzy Harmony Search Algorithm (FHS)
5. Simulation Results
5.1. Simulations Results for the FBCO
5.2. Simulations Results for the FDE
5.3. Simulations Results for the FHS
6. Statistical Test
- Ho: The proposed Type-1 algorithm without noise and with noise is greater than or equal to the originals algorithm.
- Ha: The proposed Type-1 algorithm without noise and with noise is smaller than the originals algorithm.
7. Discussion
8. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Pamučar, D.; Ljubojević, S.; Kostadinović, D.; Đorović, B. Cost and risk aggregation in multi-objective route planning for hazardous materials transportation—A neuro-fuzzy and artificial bee colony approach. Expert Syst. Appl. 2016, 65, 1–15. [Google Scholar] [CrossRef]
- Amador-Angulo, L.; Mendoza, O.; Castro, J.; Rodríguez-Díaz, A.; Melin, P.; Castillo, O. Fuzzy Sets in Dynamic Adaptation of Parameters of a Bee Colony Optimization for Controlling the Trajectory of an Autonomous Mobile Robot. Sensors 2016, 16, 1458. [Google Scholar] [CrossRef] [PubMed]
- Vasant, P.; Alparslan-Gok, S.Z.; Weber, G.-W. (Eds.) Handbook of Research on Emergent Applications of Optimization Algorithms; IGI Global: Hershey, PA, USA, 2018. [Google Scholar]
- Tien Bui, D.; Anh Tuan, T.; Hoang, N.; Quoc Thanh, N.; Nguyen, D.; Van Liem, N.; Pradhan, B. Spatial prediction of rainfall-induced landslides for the Lao Cai area (Vietnam) using a hybrid intelligent approach of least squares support vector machines inference model and artificial bee colony optimization. Landslides 2017, 14, 447–458. [Google Scholar] [CrossRef]
- Castillo, O.; Amador-Angulo, L. A generalized type-2 fuzzy logic approach for dynamic parameter adaptation in bee colony optimization applied to fuzzy controller design. Inf. Sci. 2017. [Google Scholar] [CrossRef]
- Dell’Orco, M.; Marinelli, M.; Altieri, M.G. Solving the gate assignment problem through the Fuzzy Bee Colony Optimization. Transp. Res. Part C Emerg. Technol. 2017, 80, 424–438. [Google Scholar] [CrossRef]
- Jovanović, A.; Nikolić, M.; Teodorović, D. Area-wide urban traffic control: A Bee Colony Optimization approach. Transp. Res. Part C Emerg. Technol. 2017, 77, 329–350. [Google Scholar] [CrossRef]
- Konar, M.; Bagis, A. Performance Comparison of Particle Swarm Optimization, Differential Evolution and Artificial Bee Colony Algorithms for Fuzzy Modelling of Nonlinear Systems. Elektron. Elektrotech. 2016, 22, 8–13. [Google Scholar] [CrossRef]
- Yadav, N.; Ngo, T.T.; Yadav, A.; Kim, J.H. Numerical Solution of Boundary Value Problems Using Artificial Neural Networks and Harmony Search. In Harmony Search Algorithm; Del Ser, J., Ed.; Springer Singapore: Singapore, 2017; Volume 514, pp. 112–118. [Google Scholar]
- Mazare, M.; Taghizadeh, M.; Kazemi, M.G. Optimal hybrid scheme of dynamic neural network and PID controller based on harmony search algorithm to control a PWM-driven pneumatic actuator position. J. Vib. Control 2017. [Google Scholar] [CrossRef]
- Kattan, A.; Abdullah, R.; Salam, R.A. Harmony Search Based Supervised Training of Artificial Neural Networks. In Proceedings of the 2010 International Conference on Intelligent Systems, Modelling and Simulation, Liverpool, UK, 27–29 January 2010; pp. 105–110. [Google Scholar]
- Peraza, C.; Valdez, F.; Castillo, O. Study on the Use of Type-1 and Interval Type-2 Fuzzy Systems Applied to Benchmark Functions Using the Fuzzy Harmony Search Algorithm. In Fuzzy Logic in Intelligent System Design; Melin, P., Castillo, O., Kacprzyk, J., Reformat, M., Melek, W., Eds.; Springer International Publishing: Cham, Switzerland, 2018; Volume 648, pp. 94–103. [Google Scholar]
- Peraza, C.; Valdez, F.; Garcia, M.; Melin, P.; Castillo, O. A New Fuzzy Harmony Search Algorithm Using Fuzzy Logic for Dynamic Parameter Adaptation. Algorithms 2016, 9, 69. [Google Scholar] [CrossRef]
- Peraza, C.; Valdez, F.; Castillo, O. An Adaptive Fuzzy Control Based on Harmony Search and Its Application to Optimization. In Nature-Inspired Design of Hybrid Intelligent Systems; Melin, P., Castillo, O., Kacprzyk, J., Eds.; Springer International Publishing: Cham, Switzerland, 2017; Volume 667, pp. 269–283. [Google Scholar]
- Peraza, C.; Valdez, F.; Melin, P. Optimization of Intelligent Controllers Using a Type-1 and Interval Type-2 Fuzzy Harmony Search Algorithm. Algorithms 2017, 10, 82. [Google Scholar] [CrossRef]
- Gao, K.Z.; Suganthan, P.N.; Pan, Q.K.; Chua, T.J.; Cai, T.X.; Chong, C.S. Discrete harmony search algorithm for flexible job shop scheduling problem with multiple objectives. J. Intell. Manuf. 2016, 27, 363–374. [Google Scholar] [CrossRef]
- Prayogo, D.; Cheng, M.Y.; Prayogo, H. A Novel Implementation of Nature-inspired Optimization for Civil Engineering: A Comparative Study of Symbiotic Organisms Search. Civ. Eng. Dimens. 2017, 19. [Google Scholar] [Green Version]
- Ouyang, H.; Ma, G.; Liu, G.; Li, Z.; Zhong, X. Hybrid teaching-learning based optimization with harmony search for engineering optimization problems. In Proceedings of the 2017 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017; pp. 2714–2717. [Google Scholar]
- Goudos, S.K.; Deruyck, M.; Plets, D.; Martens, L.; Joseph, W. Optimization of Power Consumption in 4G LTE Networks Using a Novel Barebones Self-adaptive Differential Evolution Algorithm. Telecommun. Syst. 2017, 66, 109–120. [Google Scholar] [CrossRef]
- Zheng, L.; Peng, D.; Sun, Y.; Gao, S. Research of Model Identification for Control System Based on Improved Differential Evolution Algorithm. In Advanced Computational Methods in Life System Modeling and Simulation; Fei, M., Ma, S., Li, X., Sun, X., Jia, L., Su, Z., Eds.; Springer Singapore: Singapore, 2017; Volume 761, pp. 282–293. [Google Scholar]
- Ochoa, P.; Castillo, O.; Soria, J. Differential Evolution Using Fuzzy Logic and a Comparative Study with Other Metaheuristics. In Nature-Inspired Design of Hybrid Intelligent Systems; Springer: Cham, Switzerland, 2017; pp. 257–268. [Google Scholar]
- Ochoa, P.; Castillo, O.; Soria, J. Type-2 fuzzy logic dynamic parameter adaptation in a new Fuzzy Differential Evolution method. In Proceedings of the 2016 Annual Conference of the North American Fuzzy Information Processing Society (NAFIPS), El Paso, TX, USA, 31 October–4 November 2016; pp. 1–6. [Google Scholar]
- Salehpour, M.; Jamali, A.; Bagheri, A.; Nariman-zadeh, N. A new adaptive differential evolution optimization algorithm based on fuzzy inference system. Eng. Sci. Technol. Int. J. 2017, 20, 587–597. [Google Scholar] [CrossRef]
- Beirami, H.; Shabestari, A.Z.; Zerafat, M.M. Optimal PID plus fuzzy controller design for a PEM fuel cell air feed system using the self-adaptive differential evolution algorithm. Int. J. Hydrogen Energy 2015, 40, 9422–9434. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, X. Shift based adaptive differential evolution for PID controller designs using swarm intelligence algorithm. Clust. Comput. 2017, 20, 291–299. [Google Scholar] [CrossRef]
- Maurya, R.; Bhandari, M. Fractional Order PID Controller with an Improved Differential Evolution Algorithm. In Proceedings of the 2016 International Conference on Micro-Electronics and Telecommunication Engineering (ICMETE), Ghaziabad, India, 22–23 September 2016; pp. 550–554. [Google Scholar]
- Pamucar, D.; Ćirović, G. Vehicle route selection with an adaptive neuro fuzzy inference system in uncertainty conditions. Decis. Mak. Appl. Manag. Eng. 2018, 1, 13–37. [Google Scholar] [CrossRef]
- Lukovac, V.; Pamučar, D.; Popović, M.; Đorović, B. Portfolio model for analyzing human resources: An approach based on neuro-fuzzy modeling and the simulated annealing algorithm. Expert Syst. Appl. 2017, 90, 318–331. [Google Scholar] [CrossRef]
- Pamucar, D.; Atanaskovic, P.; Milicic, M. Modeling of fuzzy logic system for investment management in the railway infrastructure/Modeliranje neizrazitog (fuzzy) logickog sustava za upravljanje investicijama na zeljeznickoj infrastrukturi. Teh. Vjesn. Tech. Gaz. 2015, 22, 1185–1193. [Google Scholar]
- Pamučar, D.; Vasin, L.; Atanasković, P.; Miličić, M. Planning the City Logistics Terminal Location by Applying the Green-Median Model and Type-2 Neurofuzzy Network. Comput. Intell. Neurosci. 2016. [Google Scholar] [CrossRef]
- Pamučar, D.S.; Božanić, D.; Komazec, N. Risk assessment of natural disasters using fuzzy logic system of type 2. Manag. J. Sustain. Bus. Manag. Solut. Emerg. Econ. 2017, 21, 23–34. [Google Scholar]
- Sremac, S.; Tanackov, I.; Kopić, M.; Radović, D. ANFIS model for determining the economic order quantity. Decis. Mak. Appl. Manag. Eng. 2018, 1, 1–12. [Google Scholar] [CrossRef]
- Mamdani, E.H. Application of fuzzy algorithms for control of simple dynamic plant. Proc. Inst. Electr. Eng. 1974, 121, 1585. [Google Scholar] [CrossRef]
- Zadeh, L.A. The concept of a linguistic variable and its application to approximate reasoning—I. Inf. Sci. 1975, 8, 199–249. [Google Scholar] [CrossRef]
- Kothamasu, R.; Huang, S.H. Adaptive Mamdani fuzzy model for condition-based maintenance. Fuzzy Sets Syst. 2007, 158, 2715–2733. [Google Scholar] [CrossRef]
- Akkurt, S.; Tayfur, G.; Can, S. Fuzzy logic model for the prediction of cement compressive strength. Cem. Concr. Res. 2004, 34, 1429–1433. [Google Scholar] [CrossRef] [Green Version]
- Takagi, T.; Sugeno, M. Fuzzy identification of systems and its applications to modeling and control. IEEE Trans. Syst. Man Cybern. 1985, SMC-15, 116–132. [Google Scholar] [CrossRef]
- Cao, Y.-Y.; Frank, P.M. Stability analysis and synthesis of nonlinear time-delay systems via linear Takagi–Sugeno fuzzy models. Fuzzy Sets Syst. 2001, 124, 213–229. [Google Scholar] [CrossRef]
- Cervantes, L.; Castillo, O.; Melin, P.; Valdez, F. Comparative Study of Type-1 and Type-2 Fuzzy Systems for the Three-Tank Water Control Problem. In Advances in Computational Intelligence; Batyrshin, I., Mendoza, M.G., Eds.; Springer Berlin Heidelberg: Berlin/Heidelberg, Germany, 2013; Volume 7630, pp. 362–373. [Google Scholar]
- Castillo, O.; Amador-Angulo, L.; Castro, J.R.; Garcia-Valdez, M. A comparative study of type-1 fuzzy logic systems, interval type-2 fuzzy logic systems and generalized type-2 fuzzy logic systems in control problems. Inf. Sci. 2016, 354, 257–274. [Google Scholar] [CrossRef]
- El-Hawwary, M.I.; Elshafei, A.L.; Emara, H.M.; Fattah, H.A.A. Adaptive Fuzzy Control of the Inverted Pendulum Problem. IEEE Trans. Control Syst. Technol. 2006, 14, 1135–1144. [Google Scholar] [CrossRef]
- Ontiveros, E.; Melin, P.; Castillo, O. High order α -planes integration: A new approach to computational cost reduction of General Type-2 Fuzzy Systems. Eng. Appl. Artif. Intell. 2018, 74, 186–197. [Google Scholar] [CrossRef]
- Lu, P.; Zhou, J.; Zhang, H.; Zhang, R.; Wang, C. Chaotic differential bee colony optimization algorithm for dynamic economic dispatch problem with valve-point effects. Int. J. Electr. Power Energy Syst. 2014, 62, 130–143. [Google Scholar] [CrossRef]
- Sharma, V.; Srinivasan, K.; Kumar, R.; Chao, H.-C.; Hua, K.-L. Efficient cooperative relaying in flying ad hoc networks using fuzzy-bee colony optimization. J. Supercomput. 2017, 73, 3229–3259. [Google Scholar] [CrossRef]
- Moayedikia, A.; Jensen, R.; Wiil, U.K.; Forsati, R. Weighted bee colony algorithm for discrete optimization problems with application to feature selection. Eng. Appl. Artif. Intell. 2015, 44, 153–167. [Google Scholar] [CrossRef]
- Geem, Z.W.; Kim, J.H.; Loganathan, G.V. A New Heuristic Optimization Algorithm: Harmony Search. Simulation 2001, 76, 60–68. [Google Scholar] [CrossRef]
- Manjarres, D.; Landa-Torres, I.; Gil-Lopez, S.; Del Ser, J.; Bilbao, M.N.; Salcedo-Sanz, S.; Geem, Z.W. A survey on applications of the harmony search algorithm. Eng. Appl. Artif. Intell. 2013, 26, 1818–1831. [Google Scholar] [CrossRef]
- Geem, Z.W. State-of-the-Art in the Structure of Harmony Search Algorithm. In Recent Advances in Harmony Search Algorithm; Geem, Z.W., Ed.; Springer Berlin Heidelberg: Berlin/Heidelberg, Germany, 2010; Volume 270, pp. 1–10. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Inputs | Output | ||||
|---|---|---|---|---|---|
| Iterations | Operator | Diversity | Beta | Alpha | |
| Low | and | Low | then | High | Low |
| Low | and | Medium | then | Medium High | Medium |
| Low | and | High | then | Medium High | Medium Low |
| Medium | and | Low | then | Medium High | Medium Low |
| Medium | and | Medium | then | Medium | Medium |
| Medium | and | Low | then | Medium | Medium High |
| High | and | Low | then | Medium Low | High |
| High | and | Medium | then | Medium Low | Medium High |
| High | and | High | then | Low | High |
| Inputs | Output | ||||
|---|---|---|---|---|---|
| Generations | Operator | Diversity | F | CR | |
| Low | and | Low | then | High | Low |
| Low | and | Medium | then | High | Low |
| Low | and | High | then | Medium high | Medium Low |
| Medium | and | Low | then | Medium High | Medium Low |
| Medium | and | Medium | then | Medium | Medium |
| Medium | and | High | then | Medium | Medium |
| High | and | Low | then | Medium Low | Medium high |
| High | and | Medium | then | Medium Low | Medium High |
| High | and | High | then | Low | High |
| Inputs | Output | ||||
|---|---|---|---|---|---|
| Generations | Operator | Diversity | HMR | PArate | |
| Low | and | Low | then | High | Low |
| Low | and | Medium | then | Medium Low | Medium High |
| Low | and | High | then | Medium | Medium |
| Medium | and | Low | then | Medium | Medium Low |
| Medium | and | Medium | then | Medium | Medium |
| Medium | and | High | then | Medium | High |
| High | and | Low | then | Medium | High |
| High | and | Medium | then | Medium High | Medium Low |
| High | and | High | then | High | High |
| BCO | DE | HS | |||
|---|---|---|---|---|---|
| Iterations | 100 | Generations | 100 | Iterations | 100 |
| NP(Population) | 50 | NP(Population) | 50 | Harmonies | 50 |
| FoodNumber | NP/2 | F (mutation) | 0.7 | HMR | 0.95 |
| Alpha | 0.5 | CR (crossover) | 0.3 | PArate | 0.70 |
| Beta | 2.5 | - | - | - | - |
| FBCO | FDE | FHS | |||
|---|---|---|---|---|---|
| Iterations | 100 | Generations | 100 | Iterations | 100 |
| NP(Population) | 50 | NP(Population) | 50 | Harmonies | 50 |
| FoodNumber | NP/2 | F (mutation) | Dynamic | HMR | Dynamic |
| Alpha | Dynamic | CR (cruce) | Dynamic | PArate | Dynamic |
| Beta | Dynamic | - | - | - | - |
| Water Tank Controller | ||||
|---|---|---|---|---|
| RMSE | BCO FLC without Noise | BCO FLC with Noise | FBCO FLC without Noise | FBCO FLC with Noise |
| Best | 4.50 × 10−1 | 3.64 × 10−1 | 4.24 × 10−1 | 3.64 × 10−1 |
| Worst | 5.91 × 10−1 | 5.06 × 10−1 | 5.69 × 10−1 | 5.06 × 10−1 |
| Average | 5.21 × 10−1 | 4.50 × 10−1 | 4.96 × 10−1 | 2.98 × 10−2 |
| Standard Deviation | 3.47 × 10−1 | 2.98 × 10−2 | 3.81 × 10−1 | 4.50 × 10−1 |
| Inverted Pendulum on a Cart | ||||
|---|---|---|---|---|
| RMSE | BCO FLC without Noise | BCO FLC with Noise | FBCO FLC without Noise | FBCO FLC with Noise |
| Best | 4.37 × 10−1 | 3.78 × 10−1 | 3.79 × 10−1 | 3.80 × 10−1 |
| Worst | 5.61 × 10−1 | 8.64 × 10−1 | 8.77 × 10−1 | 9.47 × 10−1 |
| Average | 5.07 × 10−2 | 6.02 × 10−1 | 8.21 × 10−2 | 4.82 × 10−1 |
| Standard Deviation | 3.23 × 10−1 | 3.45 × 10−1 | 4.66 × 10−1 | 9.19 × 10−2 |
| Water Tank Controller | ||||
|---|---|---|---|---|
| RMSE | De FLC Without Noise | DE FLC With Noise | FDE FLC Without Noise | FDE FLC with Noise |
| Best | 1.65 × 10−2 | 1.08 × 10−1 | 4.82 × 10−2 | 1.27 × 10−3 |
| Worst | 2.36 × 10−1 | 4.87 × 10−1 | 1.82 × 10−1 | 2.32 × 10−1 |
| Average | 9.37 × 10−2 | 4.48 × 10−1 | 9.44 × 10−2 | 3.67 × 10−2 |
| Standard Deviation | 4.81 × 10−2 | 7.43 × 10−2 | 3.34 × 10−2 | 5.60 × 10−2 |
| Inverted Pendulum on a Cart | ||||
|---|---|---|---|---|
| RMSE | DE FLC without Noise | DE FLC with Noise | FDE FLC without Noise | FDE FLC with Noise |
| Best | 8.45 × 10−2 | 2.96 × 10−1 | 1.83 × 10−2 | 1.40 × 10−2 |
| Worst | 1.46 × 100 | 2.99 × 10−1 | 1.40 × 100 | 7.92 × 10−1 |
| Average | 8.99 × 10−1 | 2.97 × 10−1 | 2.15 × 10−1 | 3.78 × 10−1 |
| Standard Deviation | 4.15 × 10−1 | 6.28 × 10−4 | 2.75 × 10−1 | 1.90 × 10−1 |
| Water Tank Controller | ||||
|---|---|---|---|---|
| RMSE | HS FLC without Noise | HS FLC with Noise | FHS FLC without Noise | FHS FLC with Noise |
| Best | 4.98 × 10−1 | 1.01 × 10−2 | 4.86 × 10−1 | 2.53 × 10−2 |
| Worst | 6.24 × 10−1 | 6.99 × 10−1 | 6.25 × 10−1 | 2.01 × 10−1 |
| Average | 5.66 × 10−1 | 1.40 × 10−1 | 5.54 × 10−1 | 8.36 × 10−2 |
| Standard Deviation | 3.26 × 10−2 | 1.68 × 10−1 | 2.92 × 10−2 | 3.52 × 10−2 |
| Inverted Pendulum on a Cart | ||||
|---|---|---|---|---|
| RMSE | HS FLC without Noise | HS FLC with Noise | FHS FLC without Noise | FHS FLC with Noise |
| Best | 3.15 × 10−1 | 3.97 × 10−1 | 2.99 × 10−1 | 2.97 × 10−1 |
| Worst | 4.88 × 100 | 1.28 × 100 | 2.01 × 100 | 1.76 × 10−1 |
| Average | 1.88 × 100 | 1.02 × 100 | 7.67 × 10−1 | 7.54 × 10−1 |
| Standard Deviation | 1.35 × 100 | 4.07 × 10−1 | 4.81 × 10−1 | 4.49 × 10−1 |
| Water Tank Controller | ||||
|---|---|---|---|---|
| Method | Original FLC without Noise | Original FLC with Noise | Proposed FLC without Noise | Proposed FLC with Noise |
| BCO | 381.603 | 515.283 | 408.816 | 495.371 |
| DE | 205.357 | 237.064 | 228.372 | 268.867 |
| HS | 890.95 | 65.63 | 885.70 | 77.16 |
| Inverted Pendulum on a Cart | ||||
|---|---|---|---|---|
| Method | Original without Noise | Original with Noise | Proposed without Noise | Proposed with Noise |
| BCO | 323.84 | 298.92 | 492.03 | 682.54 |
| DE | 310.66 | 380.76 | 474.44 | 682.14 |
| HS | 316.08 | 2326.63 | 508.74 | 1173.25 |
| Parameter | Value |
|---|---|
| Level of Confidence | 95% |
| Alpha | 0.05% |
| Ha | µ1 < µ2 |
| H0 | µ1 ≥ µ2 |
| Critical Value | −1.645 |
| Controller | Z-Value | Evidence | ||
|---|---|---|---|---|
| Water Tank | FBCO FLC without noise | BCO without noise | −2.734 | S |
| FBCO FLC with noise | BCO with noise | −0.169 | S | |
| Inverted Pendulum | FBCO FLC without noise | BCO without noise | −1.405 | S |
| FBCO FLC with noise | BCO with noise | −2.600 | S |
| Controller | Z-Value | Evidence | ||
|---|---|---|---|---|
| Water Tank | FDE FLC without noise | DE without noise | −0.0655 | N.S |
| FDE FLC with noise | DE with noise | −24.213 | S | |
| Inverted Pendulum | FDE FLC without noise | DE without noise | −7.525 | S |
| FDE FLC with noise | DE with noise | −2.335 | S |
| Controller | Z-Value | Evidence | ||
|---|---|---|---|---|
| Water Tank | FHS FLC without noise | HS without noise | −1.5018 | N.S |
| FHS FLC with noise | HS with noise | −1.79 | S | |
| Inverted Pendulum | FHS FLC without noise | HS without noise | −4.25 | S |
| FHS FLC with noise | HS with noise | −2.40 | S |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Castillo, O.; Valdez, F.; Soria, J.; Amador-Angulo, L.; Ochoa, P.; Peraza, C. Comparative Study in Fuzzy Controller Optimization Using Bee Colony, Differential Evolution, and Harmony Search Algorithms. Algorithms 2019, 12, 9. https://doi.org/10.3390/a12010009
Castillo O, Valdez F, Soria J, Amador-Angulo L, Ochoa P, Peraza C. Comparative Study in Fuzzy Controller Optimization Using Bee Colony, Differential Evolution, and Harmony Search Algorithms. Algorithms. 2019; 12(1):9. https://doi.org/10.3390/a12010009
Chicago/Turabian StyleCastillo, Oscar, Fevrier Valdez, José Soria, Leticia Amador-Angulo, Patricia Ochoa, and Cinthia Peraza. 2019. "Comparative Study in Fuzzy Controller Optimization Using Bee Colony, Differential Evolution, and Harmony Search Algorithms" Algorithms 12, no. 1: 9. https://doi.org/10.3390/a12010009
APA StyleCastillo, O., Valdez, F., Soria, J., Amador-Angulo, L., Ochoa, P., & Peraza, C. (2019). Comparative Study in Fuzzy Controller Optimization Using Bee Colony, Differential Evolution, and Harmony Search Algorithms. Algorithms, 12(1), 9. https://doi.org/10.3390/a12010009