1. Introduction
The existence of civilization depends upon the availability of potable water. The studies are repeatedly indicating that the potable water is acutely depleted in the last few decades. The main reason for depletion of fresh water is overuse of ground water due to growing population and industrialization [
1]. In order to meet the requirements due to increased population and industrialization, it is required to explore for sources of fresh water. The desalination of sea water is one of the possible solutions since the expense of sea water is abundant [
2].
The process of removing salts from saline water is called desalination [
3]. Desalination is achieved by (a) thermal distillation processes such as multiple effect evaporation, multi-stage flash (MSF), vapour compression, etc., and (b) membrane processes such as nano-filtration, electro-dialysis reversal, forward osmosis, reverse osmosis (RO), etc. Among these, RO has been proved to be economical [
4]. RO process also produces high quality water with minimal energy consumption. Additionally, there is low initial investment in case of RO process.
RO is a filtration process which segregates fresh water from higher concentrated saline water. In RO process, a semi-permeable membrane is used which passes the fresh water through it and rejects the concentrated solution. The various plants which use the RO process are Doha RO system [
5], Chaabene RO system [
6], Riverol and Pilipovik [
7], etc. The various pilot-scale models [
8] for RO are also presented in literature. The RO models given in literature are interacting having flux and conductivity as controlled variables generally.
The most common controller used for interacting RO models is a proportional-integral-derivative (PID) controller. The PID controller is used due to its simple structure and being able to produce satisfactory performance. The performance of PID controller depends on the quality of tuning. The classical methods [
9] used for tuning are Ziegler–Nichols, gain-phase margin method, Cohen–Coon, etc. However, the main drawback with classical tuning methods is moderate performance of the controller [
10]. The controller performance can be enhanced by improving the quality of tuning.
Various optimization based methods can guarantee the improved quality of tuning [
11]. Recently, the intelligent optimization algorithms like fireworks algorithm [
12], bacterial foraging optimization [
13], elephant herding optimization [
10], whale optimization algorithm [
2,
14], monarch butterfly optimization [
15], brain storm optimization [
16], etc. are proposed in the existing literature. Some techniques are proposed in the literature for tuning the PID controller for RO systems. In [
11], PID controller is designed using Luus–Jaakola (LJ) optimization algorithm for the RO system. Particle swarm optimization (PSO) is utilized for tuning the PID controller parameters in [
17].
Grey wolf optimization (GWO) assisted PID tuning for RO system is presented in [
4]. Similarly, whale optimization algorithm and elephant herding optimization based controllers are suggested in [
2,
10], respectively. Other relevant controller designs can be found in [
18,
19]. The methods presented in [
2,
4,
10,
19] also provide better response when compared to classical methods of tuning of PID controller. However, the methods proposed in [
2,
4,
10,
19] are providing the tuning with basic algorithms only. It is well known that the basic algorithms have the problem of local minima trapping [
20]. So sometimes, it becomes necessary to enhance the performance of basic algorithm by some modifications [
21,
22].
In this investigation, an improved algorithm, i.e., self learning salp swarm optimization (SLSSO), is utilized for tuning of PID controllers [
23]. The controller tuning is presented for Doha reverse osmosis plant (DROP). DROP model is having two controlled variables namely, flux and conductivity and two manipulated variables namely, pressure and pH. These four variables are interacting in nature. This makes DROP model an interacting two-input-two-output (TITO) system. First, a decoupler is designed using feed-forward method [
24] of decoupling to make the system non-interacting in nature. Thus obtained model has two non-interacting loops, one for flux and other for conductivity. Then, two PID controllers are obtained for two non-interacting loops using SLSSO algorithm. The integral-of-squared-error (ISE) is taken as tuning criterion. For the ease of simulation, the ISE is formulated in terms of alpha and beta parameters. The key features of proposed method are: (a) it is utilizing SLSSO for tuning of PID controllers, (b) a decoupler is designed for interacting Doha RO system, (c) the ISE is formulated in terms of alpha and beta parameters, and (d) the results of SLSSO are also compared with other algorithms to prove its supremacy. This study also obtained the PID controllers using artificial bee colony (ABC) algorithm, LJ algorithm, Nelder–Mead simplex (NMS) algorithm, sine cosine algorithm (SCA) and salp swarm optimization (SSO) algorithm for fair comparisons of performance of SLSSO tuned controllers. Additionally, time-domain specifications are tabulated for comparisons. Further, the statistical analysis of ISE obtained for controllers is presented. Moreover, the closed-loop responses (step, impulse and variable step responses) are also shown for different controllers.
The structure of the paper is as follows:
Section 2 presents the description of reverse osmosis system in consideration. The interacting TITO system is given in the same section. In addition, the decoupler design is described in this section. The controller structure is presented in
Section 3.
Section 4 is presenting the SSO algorithm. The description of SLSSO algorithm is also given in the same section.
Section 5 presents results and discussion where two case studies are discussed in detail. Finally, the findings of paper are concluded in
Section 6.
2. Reverse Osmosis System
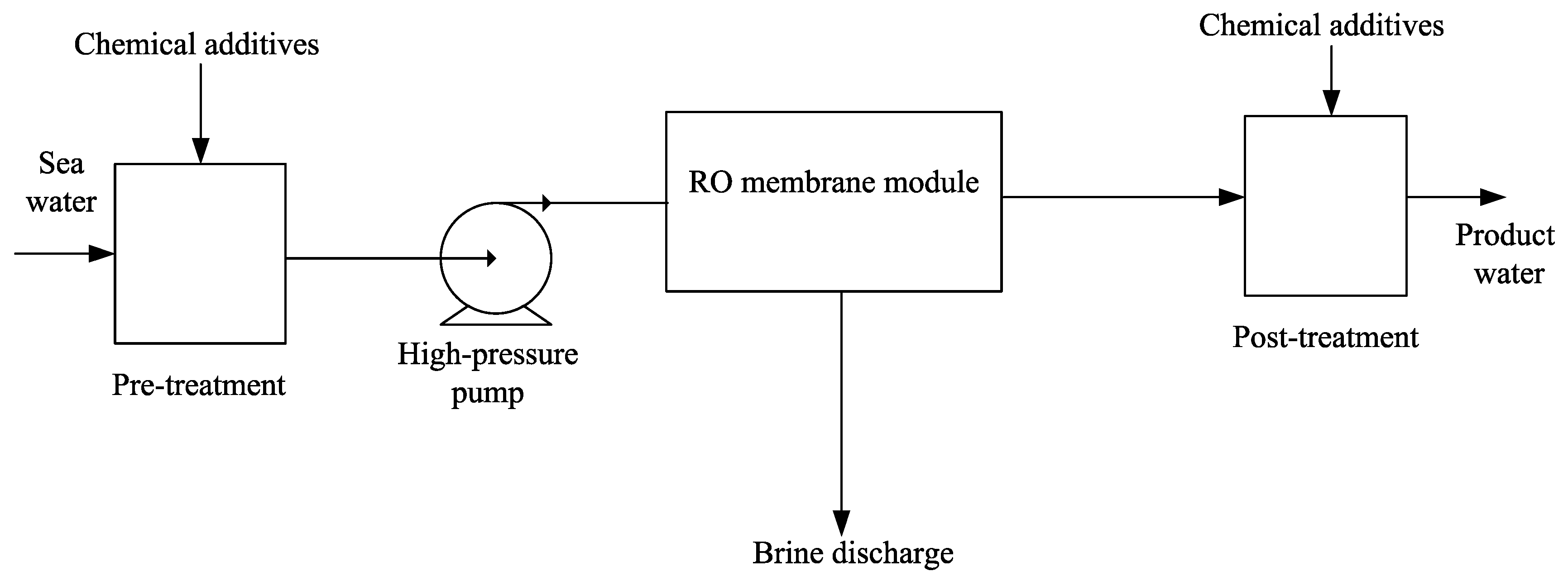
The schematic block diagram of Doha reverse osmosis plant (DROP) system is provided in
Figure 1 [
4]. The RO desalination plant comprises of four stages, namely, pre-treatment, high pressure pump, RO membrane assembly and post-treatment.
During pre-treatment stage, the saline water undergoes filtration to remove any physical or chemical impurities. This stage is important to ensure membrane longevity. The organic chemicals which can burn holes in the membrane and can cause irreparable damage to membrane are trapped using activated cartridge filters. In addition, some inhibitors are added to decrease the pH of the feed-water which helps in reducing the scaling effect. Besides this, physical impurities like mud particles and microbial growth on membrane are also removed during this stage to increase the life of membrane.
High pressure pump is utilized to provide the necessary pressure required for reverse osmosis. For brackish water, it is in the range of 15–25 bars while it is 54–80 bars for sea water. The pressurized feed-water is then fed to the membrane assembly which is made up of two or more hollow or spiral wound composite polyamide membranes. This is the main part of the RO system. It does not allow impurities to pass through it. The membrane assembly must be able to withstand the high pressure. The rejected brine from membrane assembly is sent to the discharge channel. In post-treatment stage, calcium and bi-carbonate ions are removed from the water. In addition, the pH is raised slightly above 7 and water is prepared for distribution. The two controlled variables (flux and conductivity of output water) are manipulated using two manipulated variables (feed-water pressure and feed-water pH) in case of DROP model.
2.1. Control-Loops for DROP Model
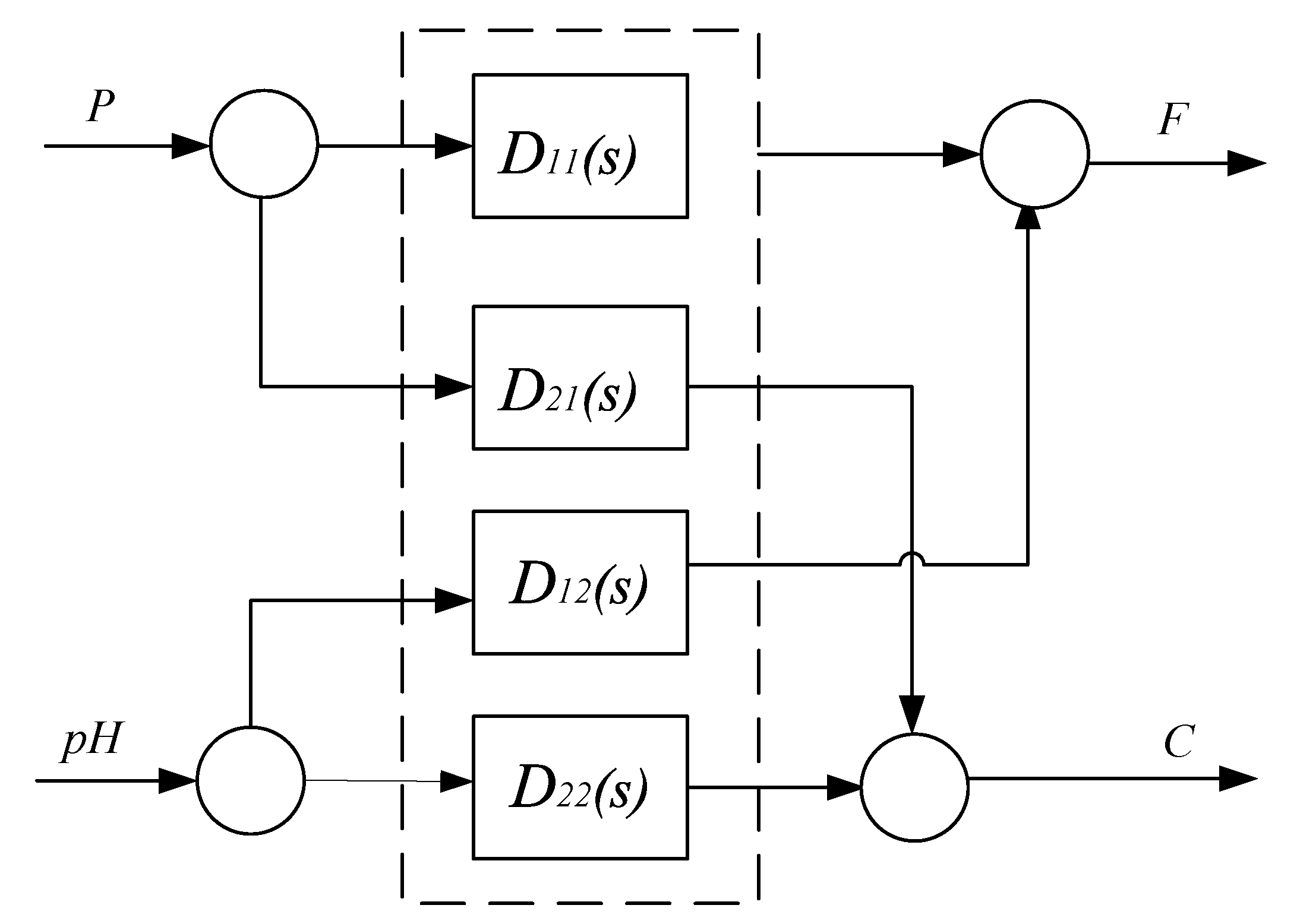
The block diagram of DROP is given in
Figure 2. The transfer function of interacting DROP model is given as
where
and
are two manipulated variables which are feed-water pressure and feed-water pH, respectively, and
and
are two controlled variables which are flow and conductivity of output water, respectively. The transfer functions
,
,
and
are denoting the individual transfer functions in between two manipulated variables and two controlled variables.
The transfer functions
,
,
and
are given as:
It can easily be concluded from transfer functions (
2)–(
5) that both flow and conductivity are manipulated by feed-water pressure. However, the feed-water pH is affecting only conductivity. The values of different parameters of transfer functions (
2)–(
5), are given in
Table 1 [
4]. The interval transfer functions of (
2)–(
5) turn out to be (
2)–(
5) by considering 40% uncertainty.
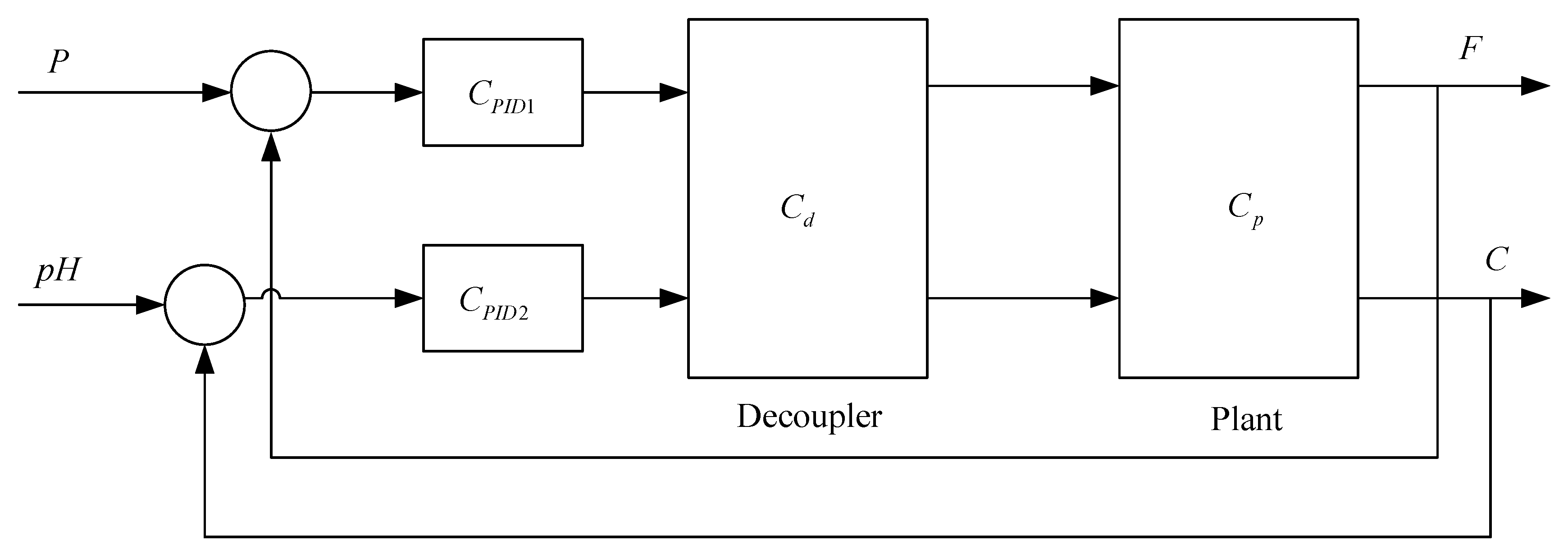
2.2. Design of Decoupler
A decoupler is required to be designed to nullify the effect of interaction for interacting TITO system.
Figure 3 shows the decoupler along with the plant. This work employs simplified decoupling technique [
17] to convert interacting TITO system into two non-interacting control loops. The transfer function of decoupler is obtained by
such that
where
and
are, respectively, the transfer functions of plant and decoupler. From (
10), it is obtained
Hence, it is clear from (
13)–(
16) that by choosing
x and
y as given in (
13) and (
14), respectively, the interacting system is decoupled into two non-interacting loops with transfer functions,
and
as given in (
15) and (
16), respectively. Thus, two independent PID controllers,
and
, can be obtained for two non-interacting loops having transfer functions, namely
and
.
4. Salp Swarm Optimization
Salp swarm optimization (SSO) [
25] is a nature inspired swarm-based meta-heuristic optimization algorithm. It is proposed recently by Mirjalili et al. [
26] in 2017. This algorithm is derived from the swarming behavior of salps. Salps are found in deep ocean and are very similar to jelly fishes. The salps’ population can be categorized into (i) leaders and (ii) followers. The leaders lead the whole population while followers follow the instructions of leaders, directly or indirectly. The salps form chain to move. The salps at front of chain are known as leaders and remaining salps are known as followers. The better half of the population is treated as leader salps. However, remaining salps are considered as followers.
At first, the candidate solutions for leaders are updated. Since, followers follow the leaders, the candidate solutions for followers are updated using the solutions obtained for leaders. Suppose, and denote initial candidate solutions for whole population where M and N represent population size and number of decision variables, respectively. The candidate solutions for leaders and followers are updated as follows.
4.1. Update of Candidate Solutions for Leaders
The candidate solutions for leaders are updated as
where
is updated candidate solutions for
,
is the position of food source,
and
represent the minimum and maximum values of decision variables,
and
are random numbers distributed uniformly in the range [0,1], and
is modified during course of iterations as
where
T and
t, respectively, are maximum number of iterations and current iteration.
4.2. Update of Candidate Solutions for Followers
The candidate solutions for followers are updated using the solutions of leaders. The mathematical expression used for updating the candidate solutions for followers is
where
denotes updated candidate solution for follower
.
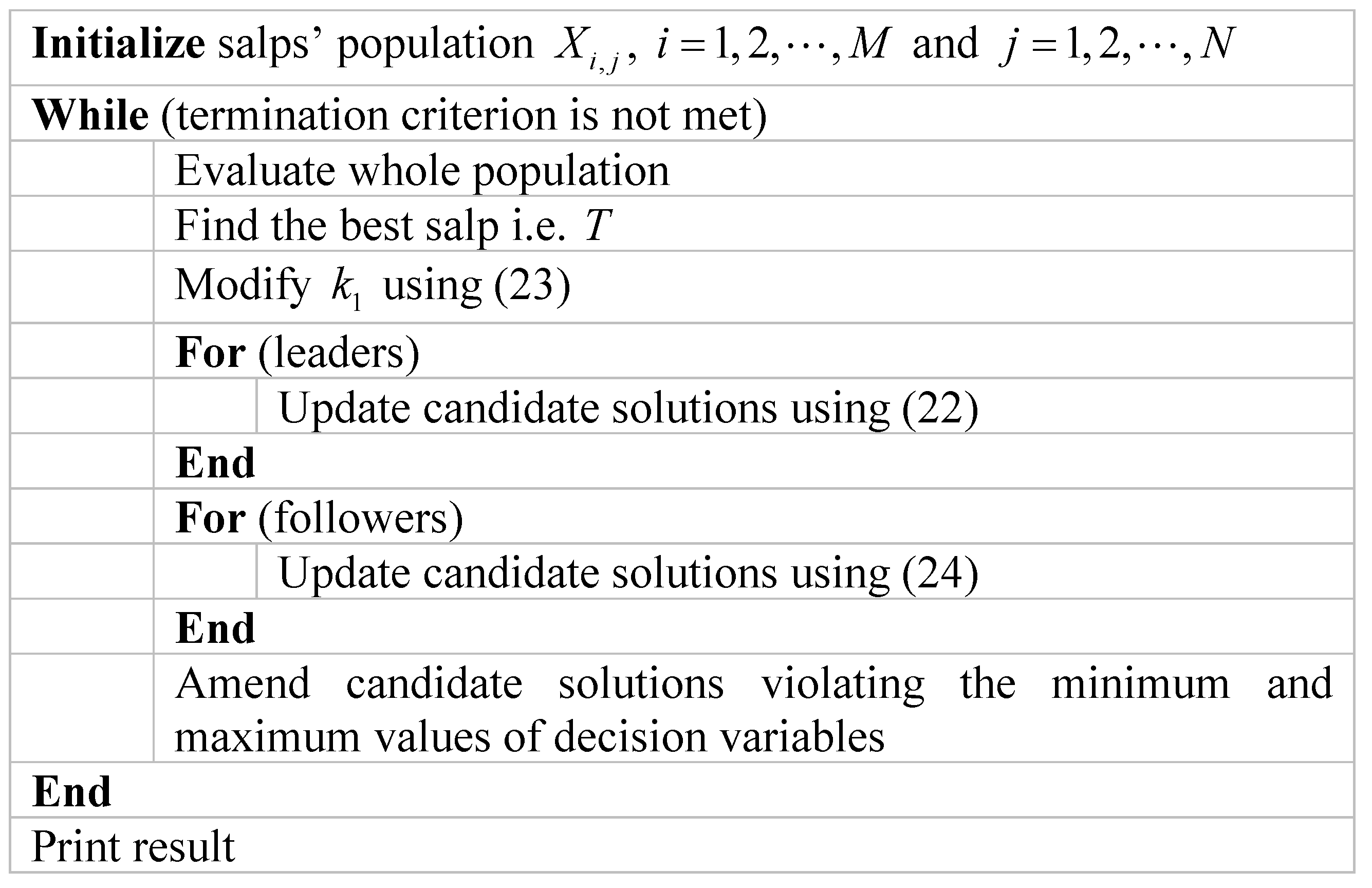
After updating the whole population as suggested in (
22) and (
24), candidate solutions violating the minimum and maximum values of decision variables are reinitialized at respective minimum and maximum values of decision variables. The pseudo code of SSO is presented in
Figure 4.
4.3. Self-Learning Salp Swarm Optimization
A self-learning rule exploits the space in close proximity of the individual position to reach its global optimum [
23]. The rule provides an opportunity to each learner to enhance the individual knowledge from self-surrounding space. This phase can be mathematically expressed as:
where,
is the new solution vector in this phase,
is the self-learning factor which determines the self-learning capability of each individual and
. The value of
is considered 3 in this work. Update the solution vector,
, using greedy selection. Thus, the updated
after this phase takes part in the next iteration.
6. Conclusions
This contribution presented design of proportional-integral-derivative (PID) controller for Doha reverse osmosis plant (DROP). The DROP system is interacting in nature and has two inputs and two outputs resulting in TITO system. Since, this TITO system is interacting, the interaction effect should be eliminated before designing the PID controllers for two manipulated variables. In this article, simplified decoupling technique is adopted to design decoupler for interacting TITO DROP system. After designing the decopuler, two PID controllers for pressure flux and pH conductivity loops are designed to manipulate the pressure and pH in order to generate specified flux and conductivity. For designing the PID controllers, integral-square-error (ISE) of the respective loop is minimized using lelf-learning salp swarm optimization (SLSSO) algorithm [
23]. It was proved that SLSSO algorithm is an excellent choice for tuning the PID gains for two loops of the DORP system.
As far as the further extension of this work is considered, it is aimed to obtain the interval model in discrete domain. The reduced-order model for discrete domain will be designed in further research. It would also be interesting to investigate the controller design using intelligent optimization algorithms like fireworks algorithm [
12], bacterial foraging optimization [
13], elephant herding optimization [
10], whale optimization algorithm [
2,
14], monarch butterfly optimization [
15], brain storm optimization [
16], etc.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}