Oil Spill Monitoring of Shipborne Radar Image Features Using SVM and Local Adaptive Threshold


Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials
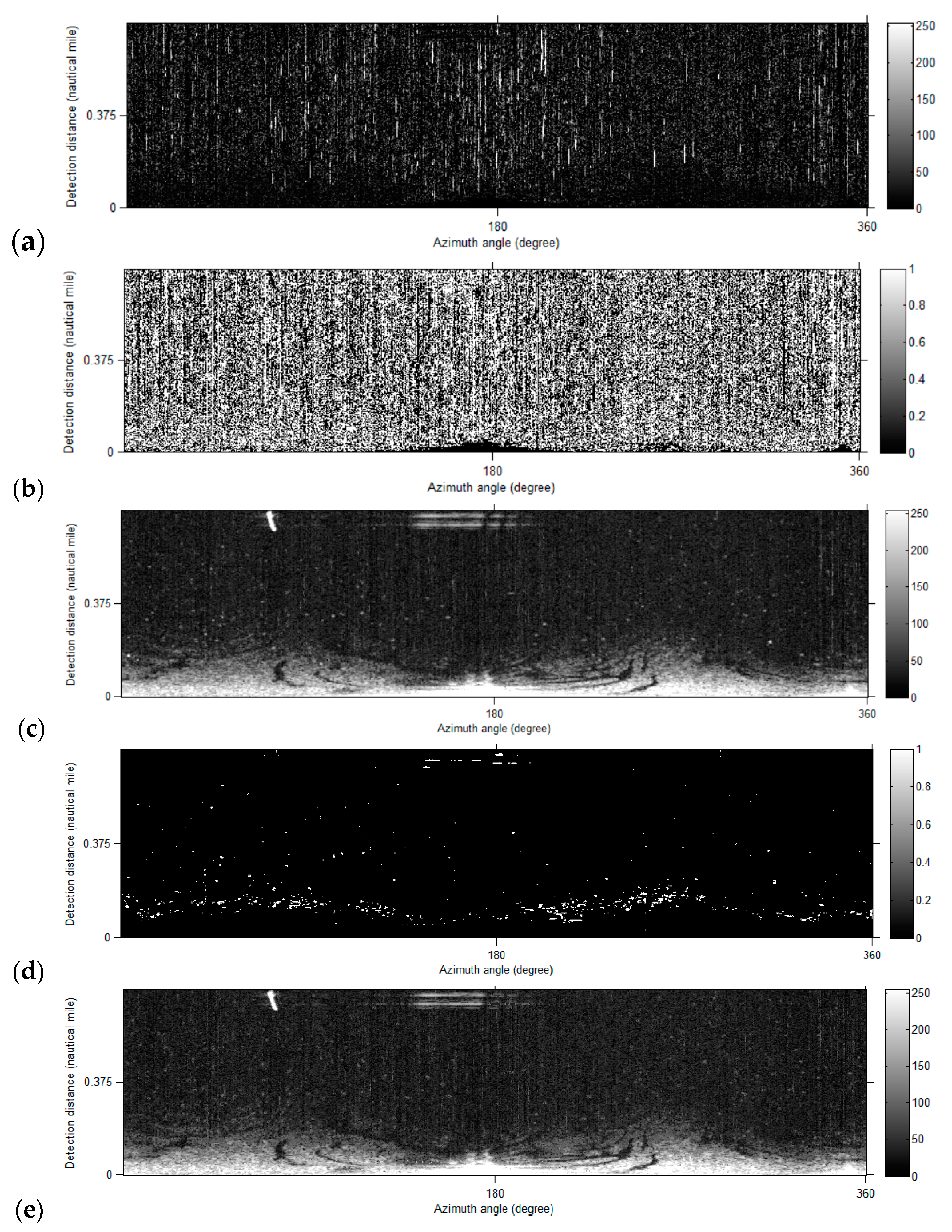
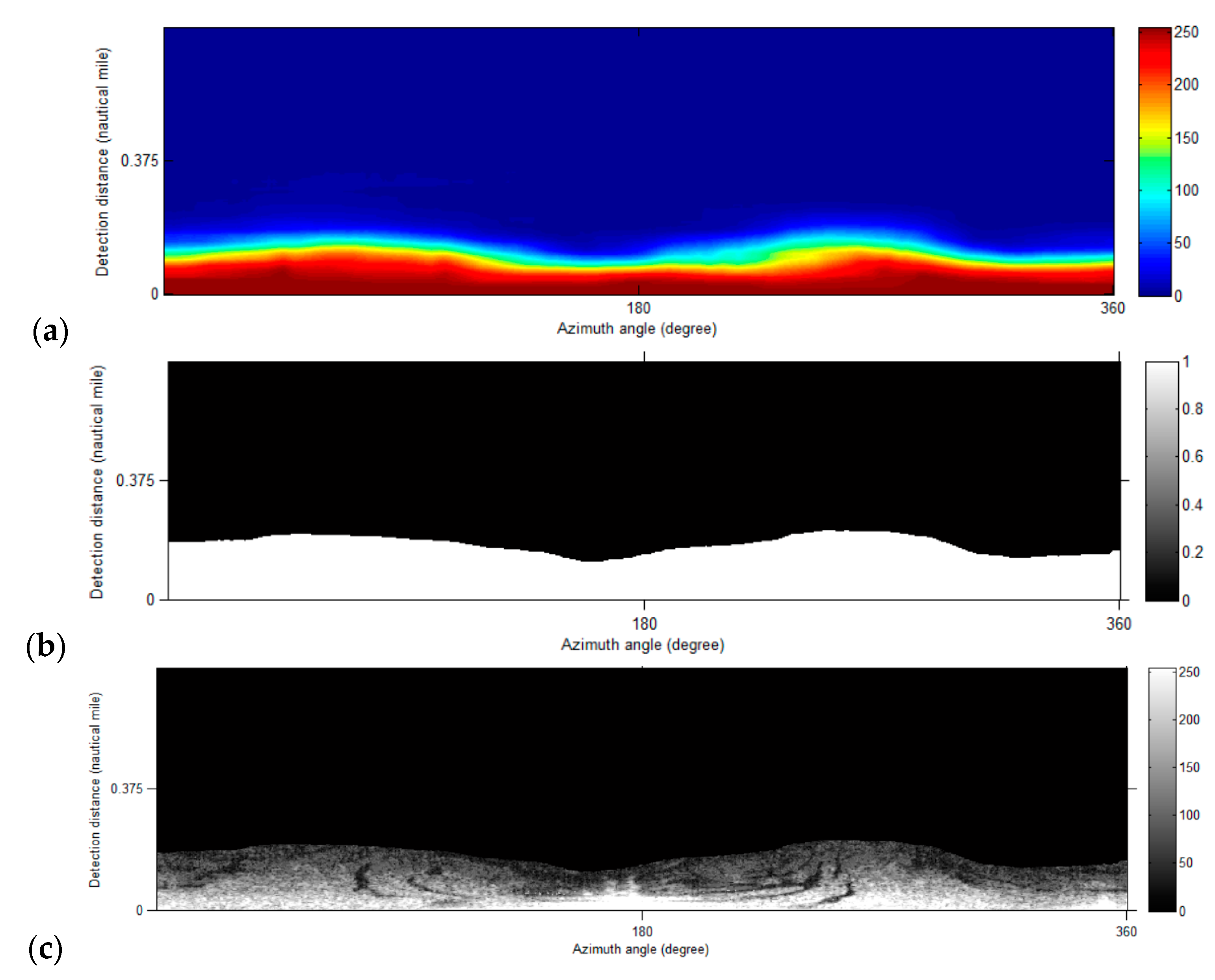
2.2. Data Preprocessing
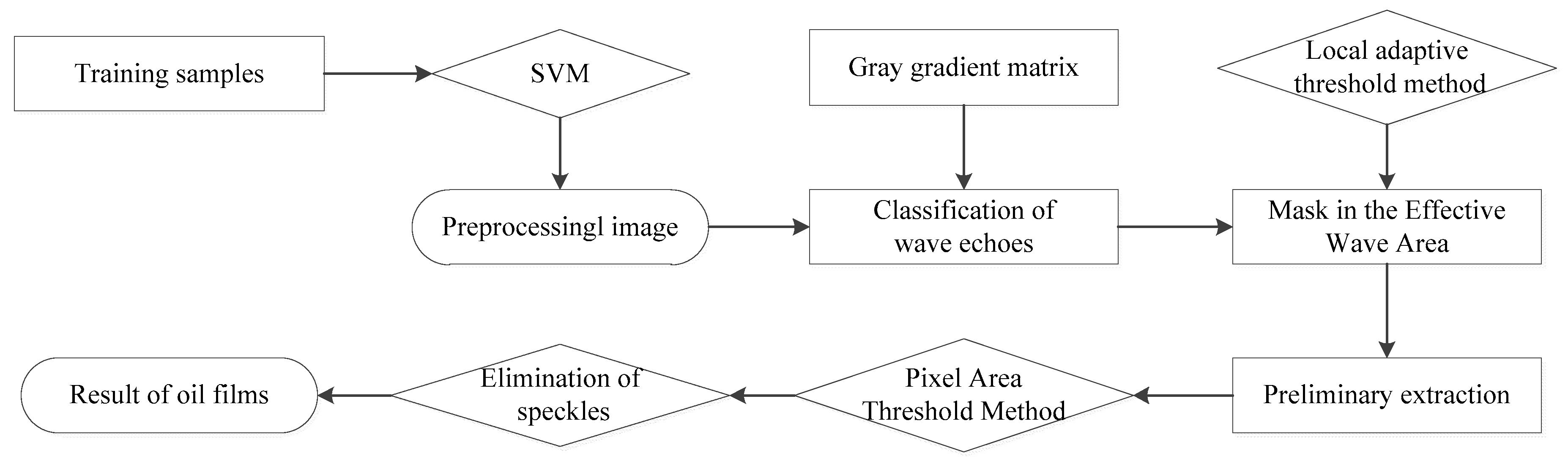
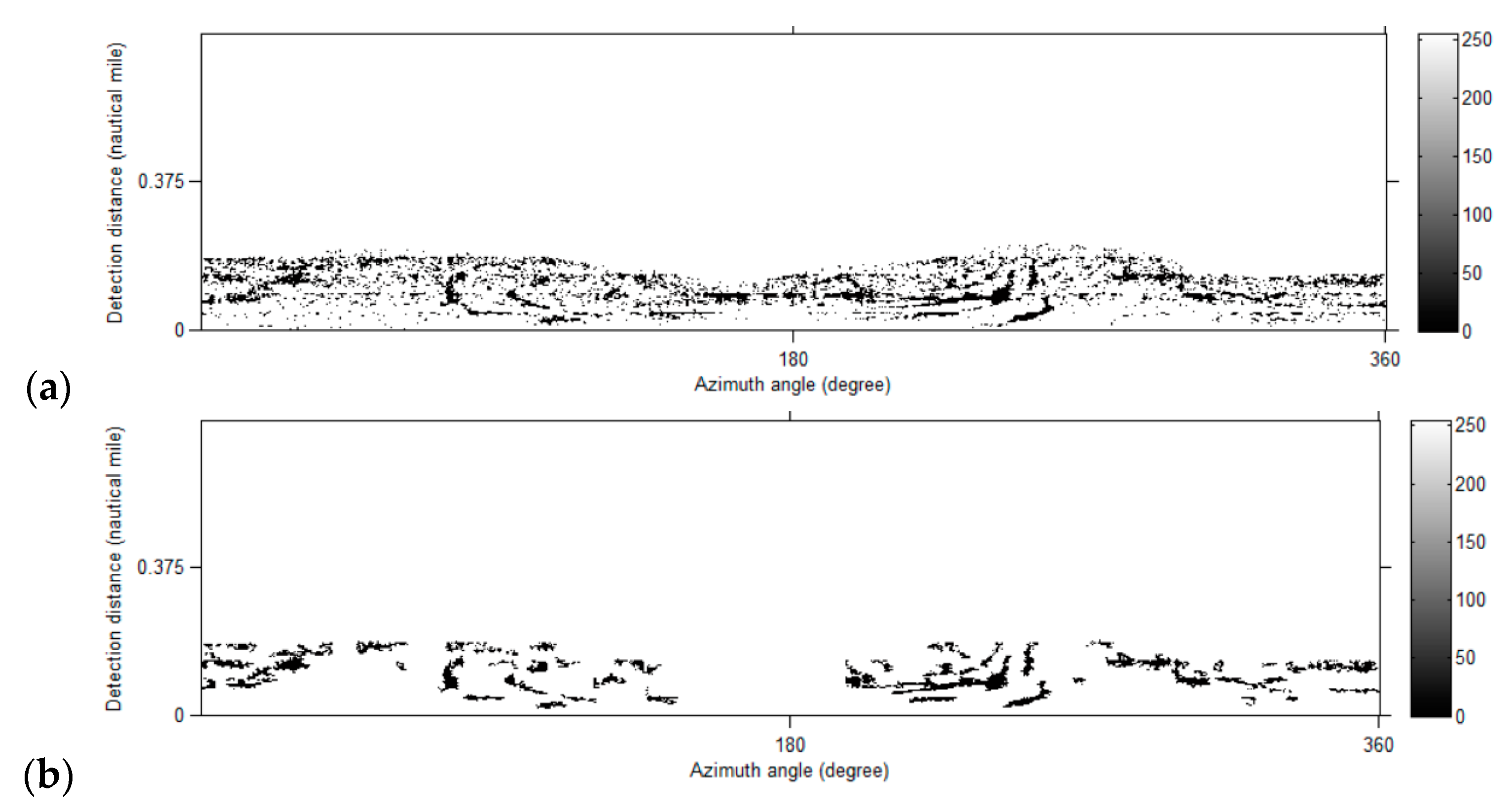
2.3. Methods
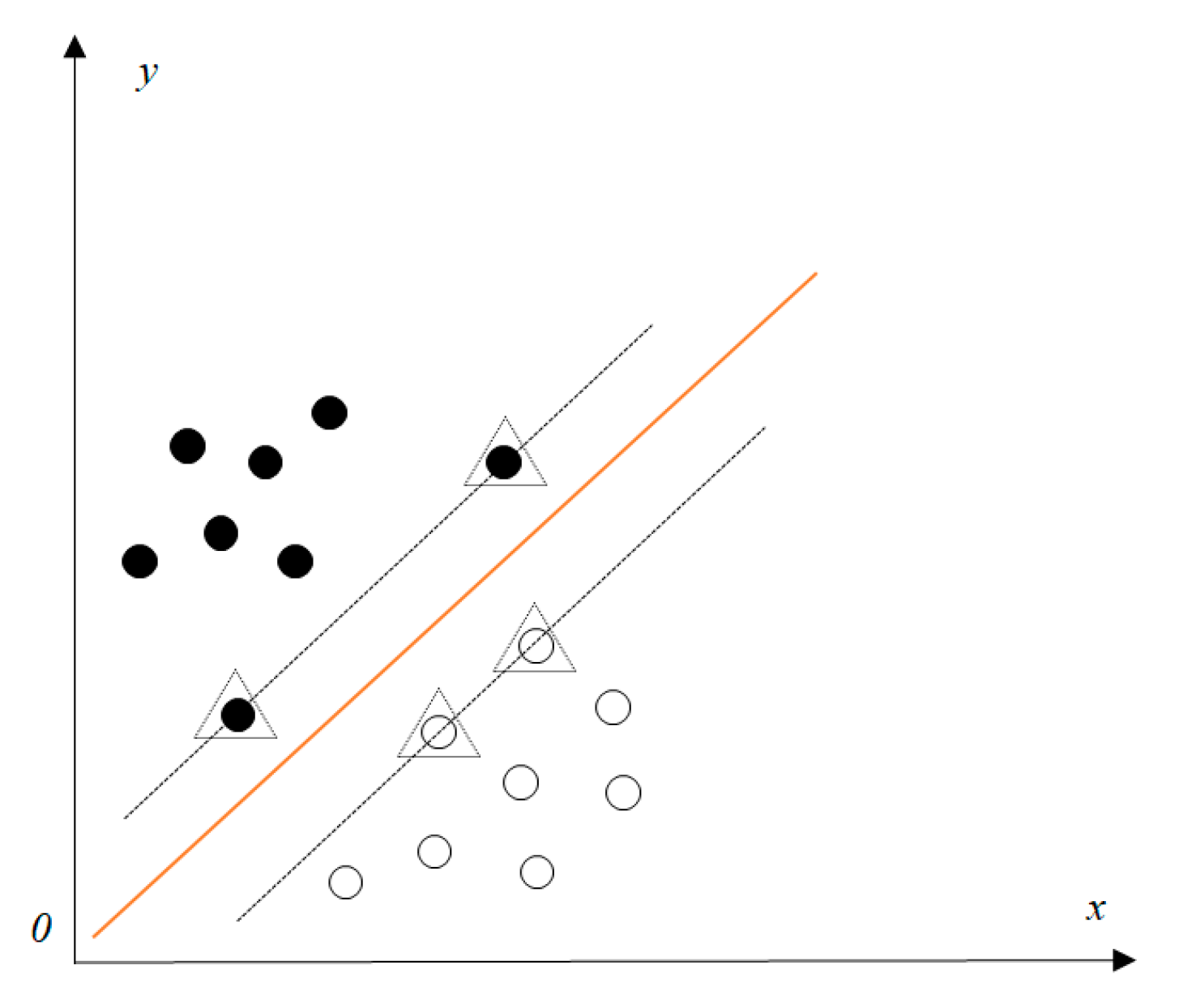
2.3.1. SVM
2.3.2. Gray Distribution Matrix
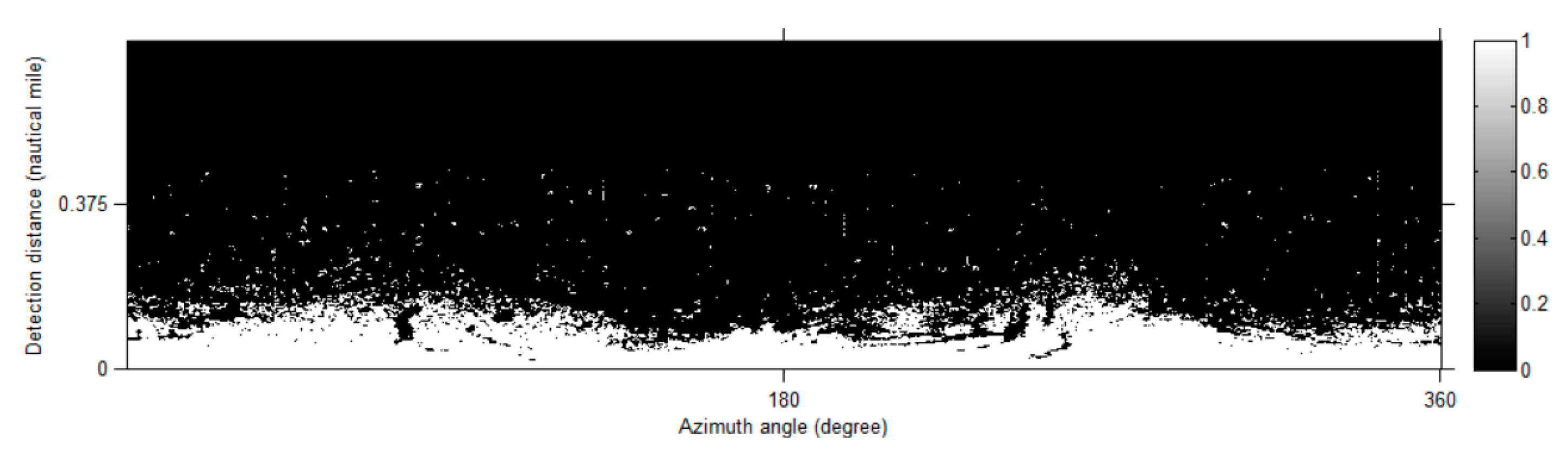
2.3.3. Local Adaptive Thresholding
3. Results and Discussion
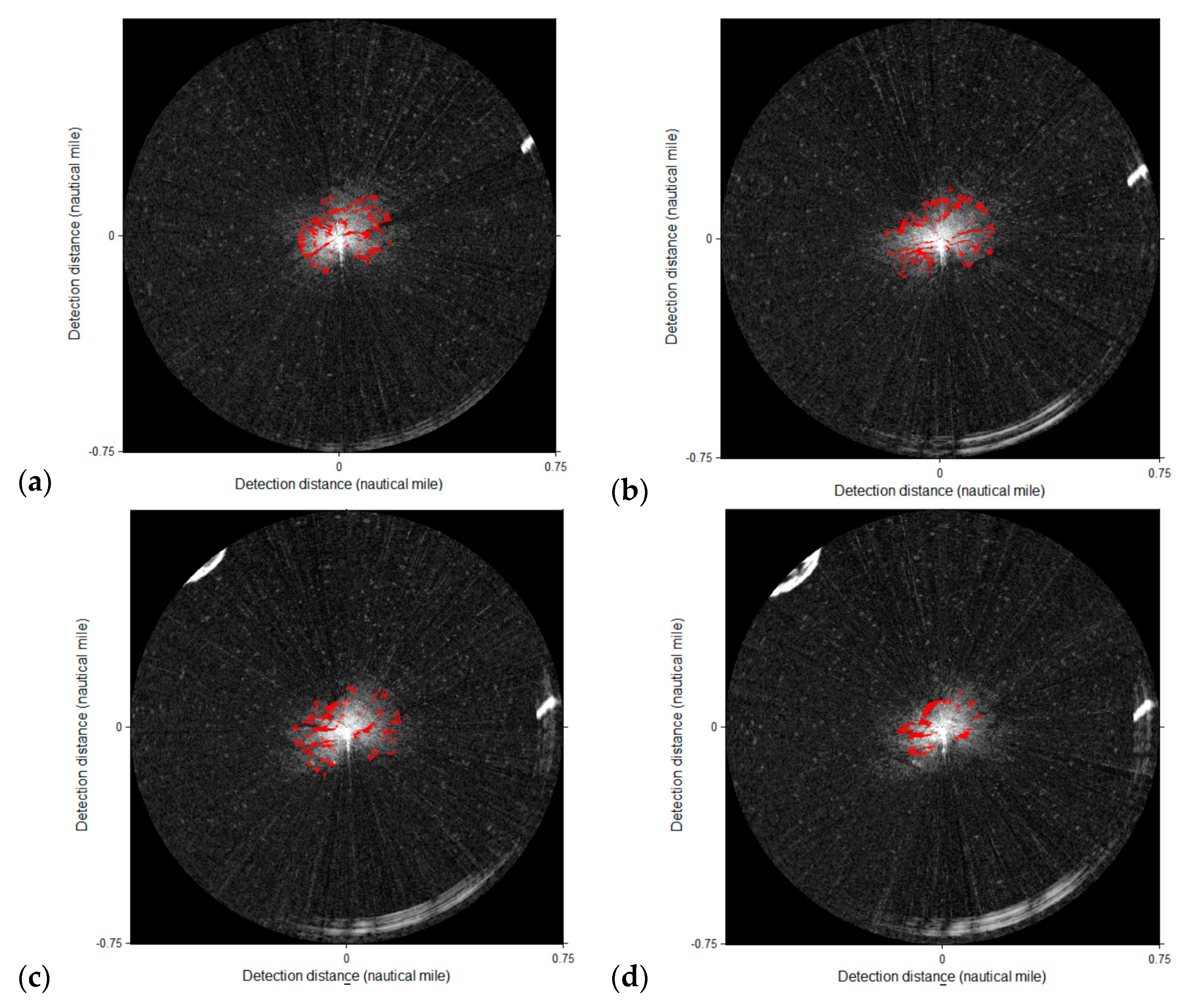
3.1. Results
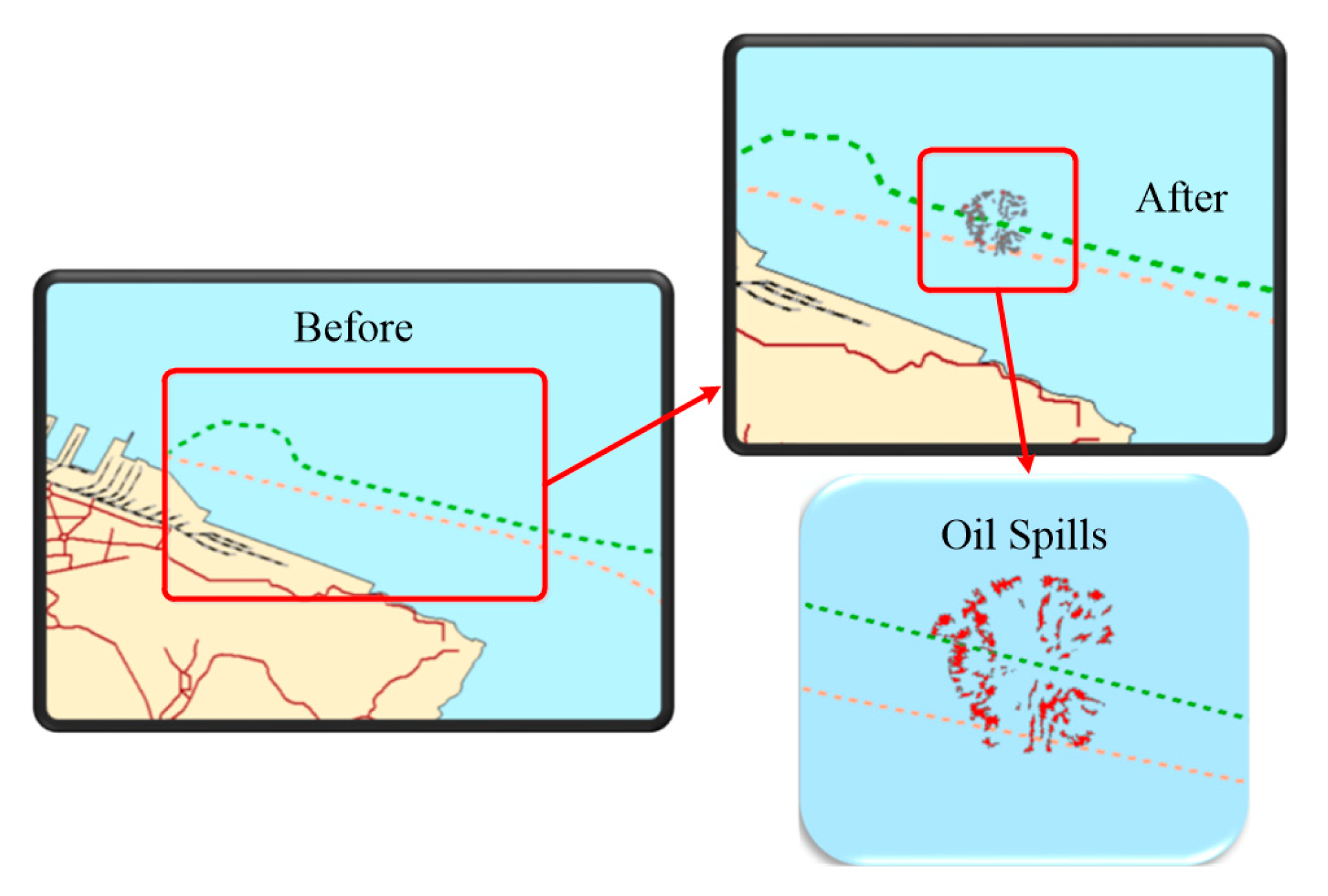
3.2. Warning with GIS
- The Global Positioning System (GPS) geographic coordinates of the clean-up ship are transformed into plane Cartesian coordinates.
- Using the range of radar, image size, and ship projection coordinates obtained in step a, the image coordinates of the oil spill boundary points are transformed into the Beijing_1954 projection coordinate system.
- The projection coordinates of the oil spill boundary points are transformed into the WGS_1984 coordinate system.
- The target polygon is generated in an electronic chart.
3.3. Verification
3.4. Advantages of Shipborne Radar Oil Spill Monitoring
3.5. Comparison with Other Local Adaptive Thresholds
3.6. Comparison with Other Oil Film Classifications of Shipborne Radar
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Agency, E.S. Oil Pollution Monitoring. In Remote Sensing Exploitation Division; ESRIN—European Space Agency (ESA): Frascati, Italy, 2018; p. 2. Available online: http://www.esa.int/esapub/br/br128/br128_1.pdf (accessed on 13 December 2019).
- Zanier, G.; Palma, M.; Petronio, A.; Roman, F.; Armenio, V. Oil Spill Scenarios in the Kotor Bay: Results from High Resolution Numerical Simulations. J. Mar. Sci. Eng. 2019, 7, 54. [Google Scholar] [CrossRef] [Green Version]
- Sissini, M.N.; Berchez, F.; Hall-Spencer, J.; Ghilardi-Lopes, N.; Carvalho, V.F.; Schubert, N.; Koerich, G.; Diaz-Pulido, G.; Silva, J.; Serrão, E.; et al. Brazil oil spill response: Protect rhodolith beds. Science 2020, 367, 156. [Google Scholar] [CrossRef]
- Brum, H.D.; Campos-Silva, J.V.; Oliveira, E.G. Brazil oil spill response: Government inaction. Science 2020, 367, 155–156. [Google Scholar] [CrossRef] [PubMed]
- Hammoud, B.; Ndagijimana, F.; Faour, G.; Ayad, H.; Jomaah, J. Bayesian Statistics of Wide-Band Radar Reflectionsfor Oil Spill Detection on Rough Ocean Surface. J. Mar. Sci. Eng. 2019, 7, 12. [Google Scholar] [CrossRef] [Green Version]
- Atta, A.M.; Abdullah, M.M.S.; Al-Lohedan, H.A.; Mohamed, N.H. Novel Superhydrophobic Sand and Polyurethane Sponge Coated with Silica/Modified Asphaltene Nanoparticles for Rapid Oil Spill Cleanup. Nanomaterials 2019, 2, 187. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tong, S.; Liu, X.; Chen, Q.; Zhang, Z.; Xie, G. Multi-Feature Based Ocean Oil Spill Detection for Polarimetric SAR Data Using Random Forest and the Self-Similarity Parameter. Remote Sens. 2019, 11, 451. [Google Scholar] [CrossRef] [Green Version]
- Brekke, C.; Solberg, A.H.S. Oil spill detection by satellite remote sensing. Remote Sens. Environ. 2005, 95, 1–13. [Google Scholar] [CrossRef]
- Fingas, M.; Brown, C.E. A Review of Oil Spill Remote Sensing. Sensors 2018, 18, 91. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; An, J.; Li, L. A two-stage registration algorithm for oil spill aerial image by invariants-based similarity and improved ICP. Int. J. Remote Sens. 2011, 32, 3649–3664. [Google Scholar] [CrossRef]
- Schrope, M. Oil spill: Deep wounds. Nature 2011, 472, 152–154. [Google Scholar] [CrossRef] [Green Version]
- Padova, D.D.; Mossa, M.; Adamo, M.; Carolis, G.D.; Pasquariello, G. Synergistic use of an oil drift model and remote sensing observations for oil spill monitoring. Environ. Sci. Pollut. Res. 2017, 24, 5530–5543. [Google Scholar] [CrossRef] [PubMed]
- Casciello, D.; Lacava, T.; Pergola, N.; Tramutoli, V. Robust Satellite Techniques for oil spill detection and monitoring using AVHRR thermal infrared bands. Int. J. Remote Sens. 2011, 32, 4107–4129. [Google Scholar] [CrossRef]
- Fingas, M.; Brown, C.E. Review of oil spill remote sensing. Mar. Pollut. Bull. 2014, 83, 9–23. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Guo, H.; Wei, G.; An, J. Dark Spot Detection in SAR Images of Oil Spill Using Segnet. Appl. Sci. 2018, 8, 2670. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Zhang, Y.; Yuan, Z.; Guo, H.; Pan, H.; Guo, J. Marine Oil Spill Detection Based on the Comprehensive Use of Polarimetric SAR Data. Sustainability 2018, 10, 4408. [Google Scholar] [CrossRef] [Green Version]
- Gil, P.; Alacid, B. Oil Spill Detection in Terma-Side-Looking Airborne Radar Images Using Image Features and Region Segmentation. Sensors 2018, 18, 151. [Google Scholar] [CrossRef] [Green Version]
- Yu, L.; Hui, L.; Zhang, Y.; Jie, C. Comparisons of Circular Transmit and Linear Receive Compact Polarimetric SAR Features for Oil Slicks Discrimination. J. Sens. 2015, 2015, 1–14. [Google Scholar]
- Yin, J.; Jian, Y.; Zhou, Z.S.; Song, J. The Extended Bragg Scattering Model-Based Method for Ship and Oil-Spill Observation Using Compact Polarimetric SAR. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 3760–3772. [Google Scholar] [CrossRef]
- Alireza, T.; Natascha, O. Adaptive Weibull Multiplicative Model and Multilayer Perceptron neural networks for dark-spot detection from SAR imagery. Sensors 2014, 14, 22798. [Google Scholar]
- Chen, G.; Li, Y.; Sun, G.; Zhang, Y. Application of Deep Networks to Oil Spill Detection Using Polarimetric Synthetic Aperture Radar Images. Appl. Sci. 2017, 7, 968. [Google Scholar] [CrossRef]
- Nunziata, F.; Buono, A.; Migliaccio, M. COSMO–SkyMed Synthetic Aperture Radar Data to Observe the Deepwater Horizon Oil Spill. Sustainability 2018, 10, 3599. [Google Scholar] [CrossRef] [Green Version]
- Guo, H.; Wu, D.; An, J. Discrimination of Oil Slicks and Lookalikes in Polarimetric SAR Images Using CNN. Sensors 2017, 17, 1837. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jones, C.E.; Holt, B. Experimental L-Band Airborne SAR for Oil Spill Response at Sea and in Coastal Waters. Sensors 2018, 18, 641. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Alpers, W.; Hühnerfuss, H. The Damping of Ocean Waves by Surface Films: A New Look at an Old Problem. J. Geophys. Res. Atmos. 1989, 94, 6251–6265. [Google Scholar] [CrossRef]
- Yu, L.; Zhang, Y.; Jie, C.; Zhang, H. Improved Compact Polarimetric SAR Quad-Pol Reconstruction Algorithm for Oil Spill Detection. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1139–1142. [Google Scholar]
- Buono, A.; Nunziata, F.; Migliaccio, M.; Li, X. Polarimetric Analysis of Compact-Polarimetry SAR Architectures for Sea Oil Slick Observation. IEEE Trans. Geosci. Remote Sens. 2016, 54, 1–14. [Google Scholar] [CrossRef]
- Bern, T.I.; Wahl, T.; Andersen, T.; Olsen, R. Oil spill detection using satellite based SAR - Experience from a field experiment. Photogramm. Eng. Remote Sens. 1993, 59, 423–428. [Google Scholar]
- Solberg, A.H.S.; Storvik, G.; Solberg, R.; Volden, E. Automatic detection of oil spills in ERS SAR images. IEEE Trans. Geosci. Remote Sens. 1999, 37, 1916–1924. [Google Scholar] [CrossRef] [Green Version]
- Kanaa, T.F.N.; Tonye, E.; Mercier, G.; Onana, V.P.; Ngono, J.M.; Frison, P.L.; Rudant, J.P.; Garello, R. In Detection of Oil Slick Signatures in SAR Images by Fusion of Hysteresis Thresholding Responses. In Proceedings of the 2003 IEEE International Geoscience & Remote Sensing Symposium, Toulouse, France, 21–25 July 2003. [Google Scholar]
- Wang, H.; Huang, T.Z.; Du, Y.Q. A global minimization hybrid active contour model with applications to oil spill images. Comput. Math. Appl. 2014, 68, 353–362. [Google Scholar] [CrossRef]
- Lyu, X. In Oil Spill Detection Based on Features and Extreme Learning Machine Method in SAR Images. In Proceedings of the 2018 3rd International Conference on Mechanical, Control and Computer Engineering (ICMCCE), Huhhot, China, 14–16 September 2018. [Google Scholar]
- Taravat, A.; Frate, F.D. Weibull Multiplicative Model and machine learning models for full-automatic dark-spot detection from SAR images. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, 40, 421–424. [Google Scholar] [CrossRef] [Green Version]
- Zhu, X.; Ying, L.; Feng, H.; Liu, B.; Jin, X. Oil spill detection method using X-band marine radar imagery. J. Appl. Remote Sens. 2015, 9, 95985. [Google Scholar] [CrossRef]
- Xu, J.; Liu, P.; Wang, H.; Lian, J.; Li, B. Marine Radar Oil Spill Monitoring Technology Based on Dual-Threshold and C-V Level Set Methods. J. Indian Soc. Remote 2018, 46, 1949–1961. [Google Scholar] [CrossRef]
- Xu, J.; Cui, C.; Feng, H.; You, D.; Wang, H.; Li, B. Marine Radar Oil-Spill Monitoring through Local Adaptive Thresholding. Environ. Forensics 2019, 20, 196–209. [Google Scholar] [CrossRef]
- Liu, P.; Li, Y.; Liu, B.; Chen, P.; Xu, J. Semi-Automatic Oil Spill Detection on X-Band Marine Radar Images Using Texture Analysis, Machine Learning, and Adaptive Thresholding. Remote Sens. 2019, 11, 756. [Google Scholar] [CrossRef] [Green Version]
- Otsu, N. A threshold selection method from gray-level histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef] [Green Version]
- Cortes, C.; Vapnik, V. Support-vector networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Zhu, X.; Li, N.; Pan, Y. Optimization Performance Comparison of Three Different Group Intelligence Algorithms on a SVM for Hyperspectral Imagery Classification. Remote Sens. 2019, 11, 734. [Google Scholar] [CrossRef] [Green Version]
- Phyo, C.N.; Zin, T.T.; Tin, P. Complex Human–Object Interactions Analyzer Using a DCNN and SVM Hybrid Approach. Appl. Sci. 2019, 9, 1869. [Google Scholar] [CrossRef] [Green Version]
- Liu, P.; Chen, X. Intercropping Classification From GF-1 and GF-2 Satellite Imagery Using a Rotation Forest Based on an SVM. ISPRS Int. J. Geo-Inf. 2019, 8, 86. [Google Scholar] [CrossRef] [Green Version]
- Matkan, A.A.; Hajeb, M.; Azarakhsh, Z. Oil spill detection from SAR image using SVM based classification. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, 1, 55–60. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Li, Y.; Liang, X.S.; Tsou, J. Comparison of Oil Spill Classifications Using Fully and Compact Polarimetric SAR Images. Appl. Sci. 2017, 7, 193. [Google Scholar] [CrossRef] [Green Version]
- Niblack, W. An Introduction to Digital Image Processing; Prentice Hall: Englewood Cliffs, NJ, USA, 1986; pp. 115–116. [Google Scholar]
- Sauvola, J.; Pietikäinen, M. Adaptive document image binarization. Pattern Recognit. 2000, 33, 225–236. [Google Scholar] [CrossRef] [Green Version]
- Bernsen, J. In Dynamic Thresholding of Grey-Level Images. In Proceedings of the Eigth International Conference Pattern Recognition, ICPR 1986, Paris, France, 27–31 October 1986; pp. 1251–1255. [Google Scholar]
- Liu, P.; Li, Y.; Xu, J.; Zhu, X. Adaptive enhancement of x-band marine radar imagery to detect oil spill segments. Sensors 2017, 17, 2349. [Google Scholar] [CrossRef] [Green Version]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Product type | Sperry Marine B.V. |
| Band | X-band |
| Detection distance | 0.5/0.75/1.5.3.6.12 NM |
| Image size | 1024 × 1024 |
| Antenna type | Waveguide split antenna |
| Polarization mode | Horizontal |
| Horizontal detection angle | 360° |
| Rotation speed | 28–45 revolutions/min |
| Length of antenna | 8 ft |
| Pulse repetition frequency | 3000 Hz/1800 Hz/785 Hz |
| Pulse width | 50 ns/250 ns/750 ns |
| Data acquisition period | 2 s |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, J.; Wang, H.; Cui, C.; Zhao, B.; Li, B. Oil Spill Monitoring of Shipborne Radar Image Features Using SVM and Local Adaptive Threshold. Algorithms 2020, 13, 69. https://doi.org/10.3390/a13030069
Xu J, Wang H, Cui C, Zhao B, Li B. Oil Spill Monitoring of Shipborne Radar Image Features Using SVM and Local Adaptive Threshold. Algorithms. 2020; 13(3):69. https://doi.org/10.3390/a13030069
Chicago/Turabian StyleXu, Jin, Haixia Wang, Can Cui, Baigang Zhao, and Bo Li. 2020. "Oil Spill Monitoring of Shipborne Radar Image Features Using SVM and Local Adaptive Threshold" Algorithms 13, no. 3: 69. https://doi.org/10.3390/a13030069
APA StyleXu, J., Wang, H., Cui, C., Zhao, B., & Li, B. (2020). Oil Spill Monitoring of Shipborne Radar Image Features Using SVM and Local Adaptive Threshold. Algorithms, 13(3), 69. https://doi.org/10.3390/a13030069