Solving the Urban Transit Routing Problem Using a Cat Swarm Optimization-Based Algorithm



Abstract
:1. Introduction
1.1. Related Work
1.2. Comparison Criteria
2. Problem Description
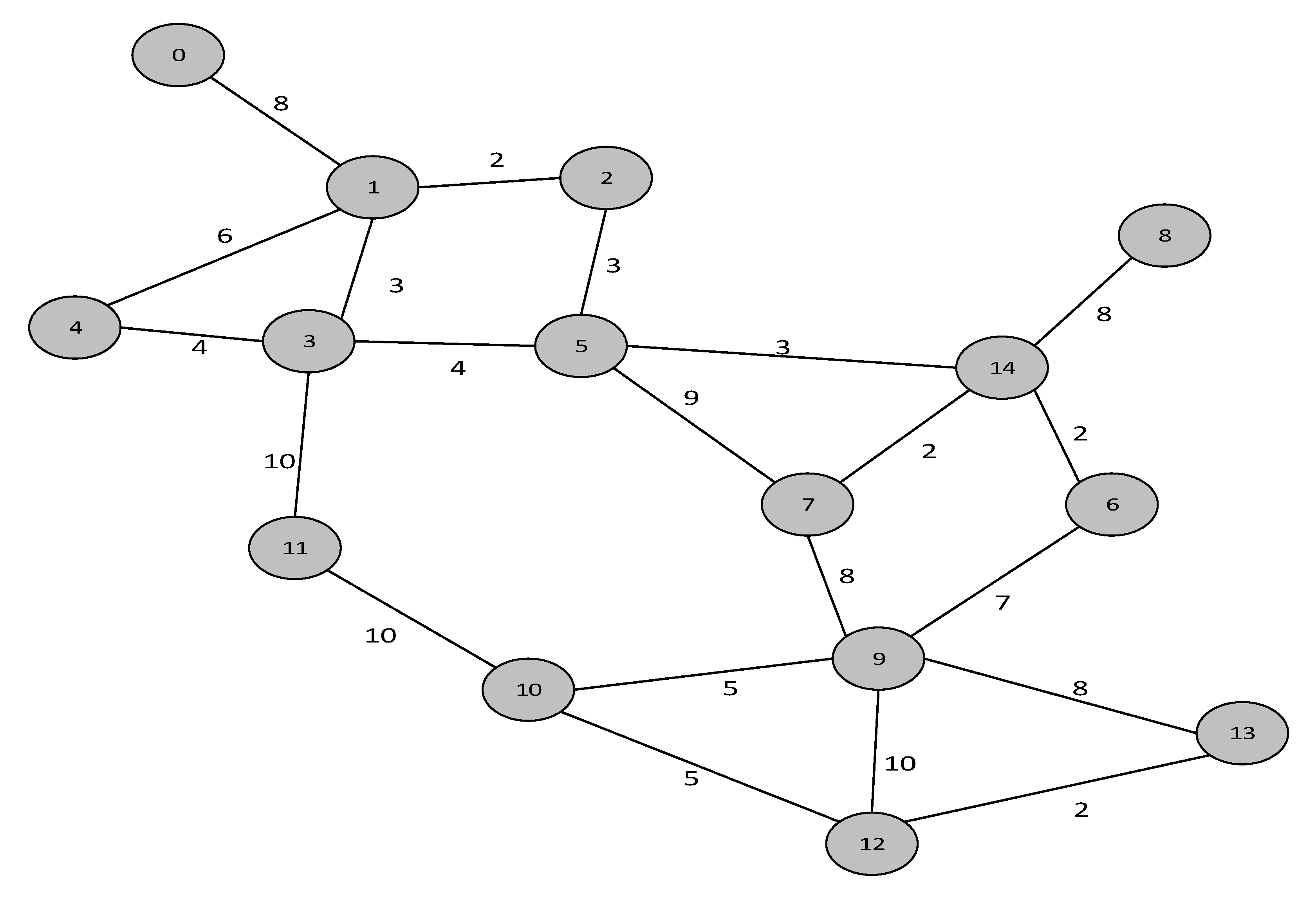
2.1. Urban Transit Routing Problem (UTRP)
- Undertake public and private vehicle analysis.
- Carry out surveys on the local population.
- Examine current ticket sales, etc.
2.2. Input Data and Optimization Criteria
- Data that concern the connections among the network’s nodes (road network’s structure).
- Data that concern times needed to go from one node of the network to another (travel times).
- Data that concern travel demands between any two nodes of the road network (see Table 1 as an example).
- The percentage of unsatisfied demands (should be as low as possible, ideally equal to zero).
- The average travel time in minutes per transit user (should be as low as possible).
- The percentage of “with no transfers” satisfied demands (should be as high as possible).
- A minimum and a maximum number of nodes (length) must be defined for each route (defining that each route must have minimum and maximum length ensures route network’s connectivity and assists bus schedule adherence, respectively).
- In order passengers to be able to travel between any two nodes of the road network, there should be a path connecting any two of them (the road network should be a connected graph).
- Individual routes should not have any cycles or backtracks.
- To limit transportation cost, the service provider has usually predefined the number of routes in the route set.
2.3. Solution Approaches and Drawbacks
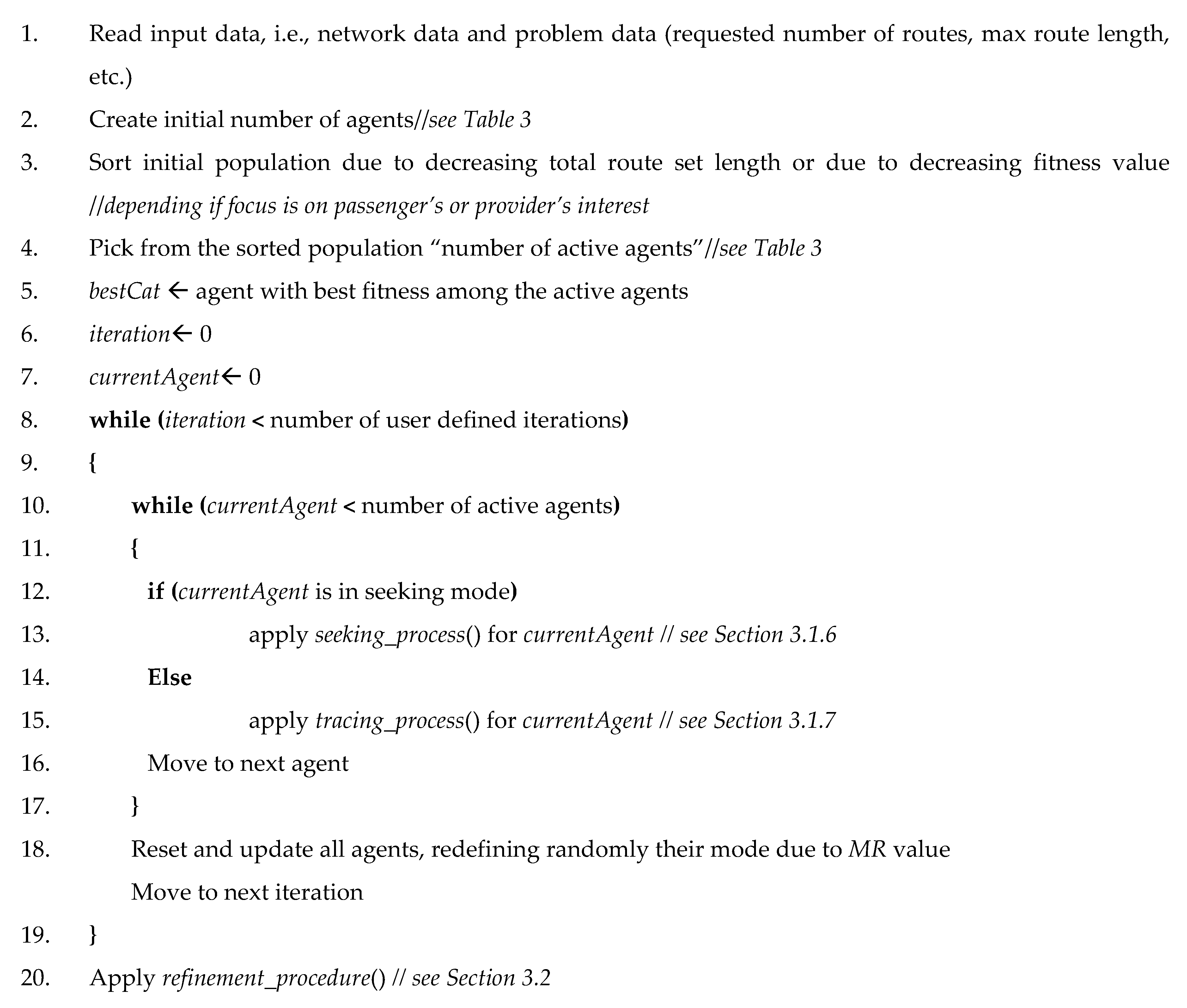
3. The Proposed CSO-Based Algorithm
- Step 1:
- Create j copies of the current position of catk (Note: j = SMP)If (the value of parameter SPC is true) j = (SMP − 1)Add the current position into the pool of candidate position to be moved to
- Step 2:
- For (each copy)Change the value of CDC dimensions at random (Note: these changes cannot exceed a percent ± RSD)
- Step 3:
- Calculate the fitness value for all candidate positions
- Step 4:
- If (the calculated finesses are not equal with each other)Calculate the probability Pi of selecting each candidate positionElsePi= 1.0, (Note: for all i)
- Step 5:
- Pick at random, among candidate positions, the position to which catk will be movedPlace catk to this positionProbability Pi, which is the probability of each candidate position to be selected for moving catkp there, is computed using Equation (1):where FSi is the fitness value of position i, FSmax is the biggest fitness value found, FSmin is the smallest fitness value found and FSb is equal to FSmax for maximization problems and equal to FSmin for minimization problems, respectively.
- Step 1:
- Update the velocity of each dimension of catk
- Step 2:
- If (the value of a velocity is outside allowed range)Set it equal to the maximum allowed value
- Step 3:
- Update the position of catk
3.1. The Proposed CSO-Based Approach
3.1.1. Representation of Cats
3.1.2. Initialization of the Agents (Cats)
- Establishment of a consistent route set.
- The duration of each route does not exceed the allowed limit.
- The minimum and maximum number of nodes on each route of the route set is within the predefined limits.
- There are no circles or inversions on each route in the route set.
3.1.3. Route Set Evaluation
3.1.4. Calculating F4(r)—The Service Provider’s Cost Actor
3.1.5. Constructing the Best Route Procedure
- Data concerning the road network as well as the transfer requests.
- Data concerning problem requirements (number of routes in the resulting route set, maximum number of nodes for each route, the maximum time length per route and the minimum nodes per rout).
- Transfer penalty.
- Test’s seed.
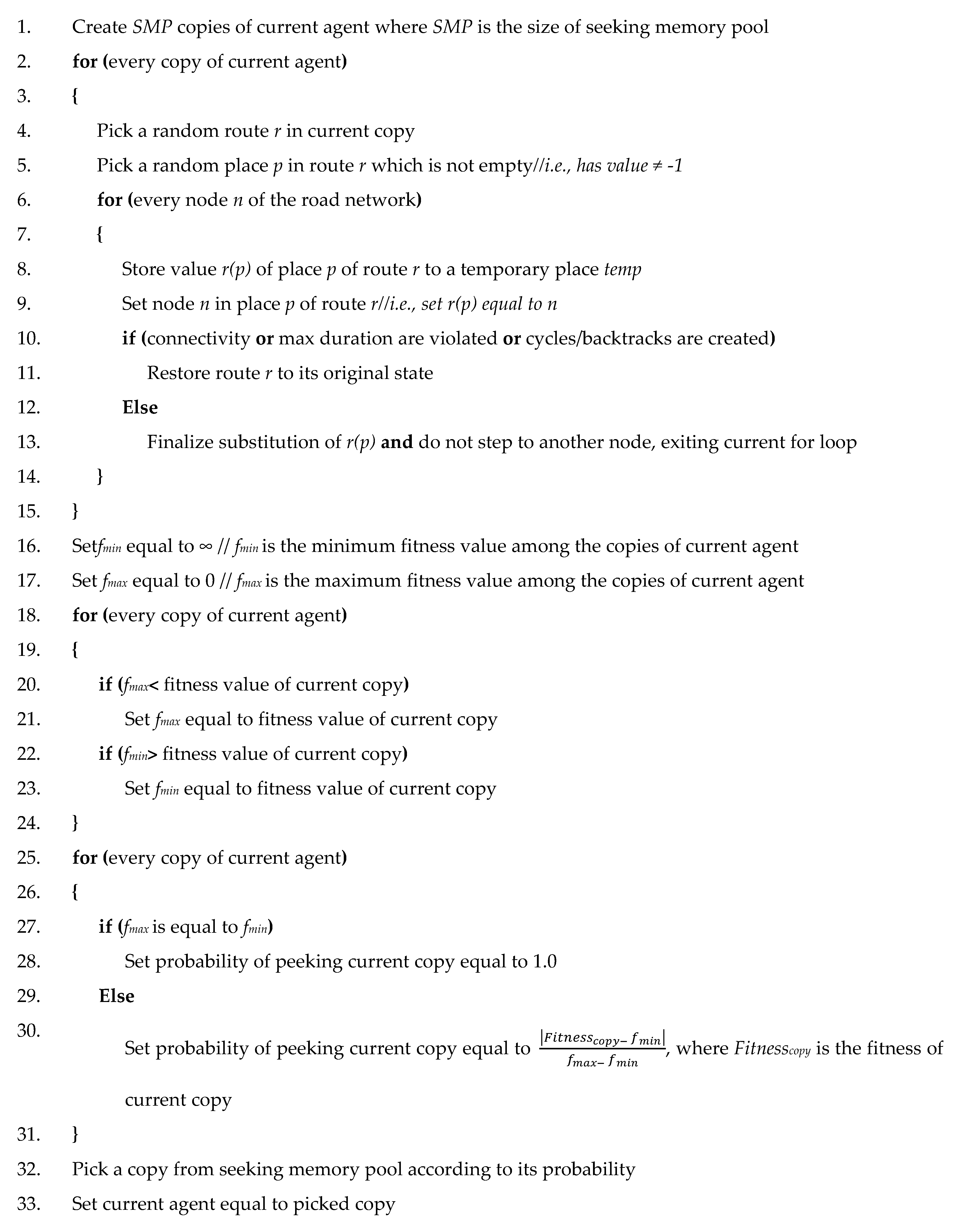
3.1.6. Seeking Mode Process
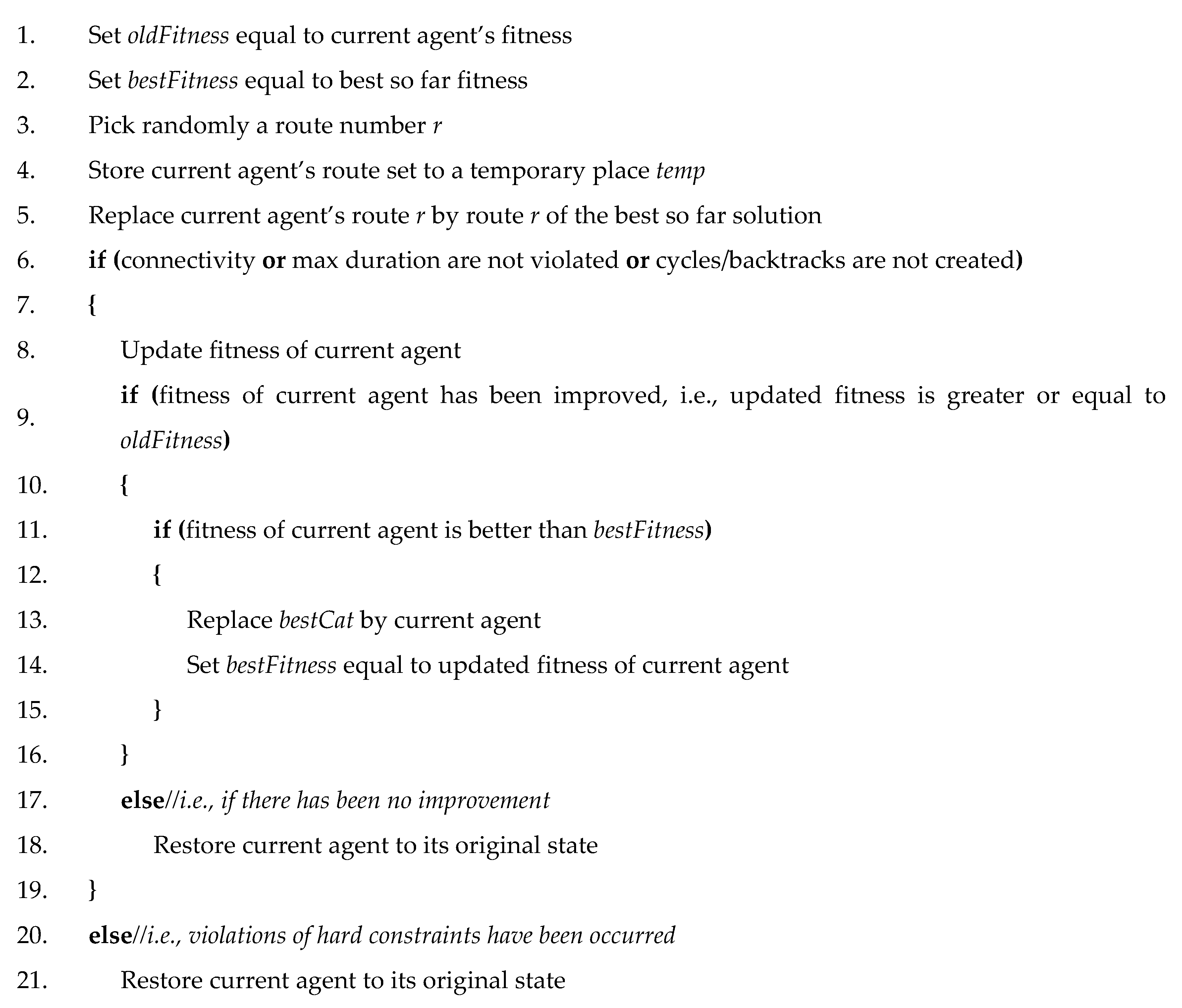
3.1.7. Tracing Mode Process
3.1.8. Setting the Algorithm’s Parameters Values
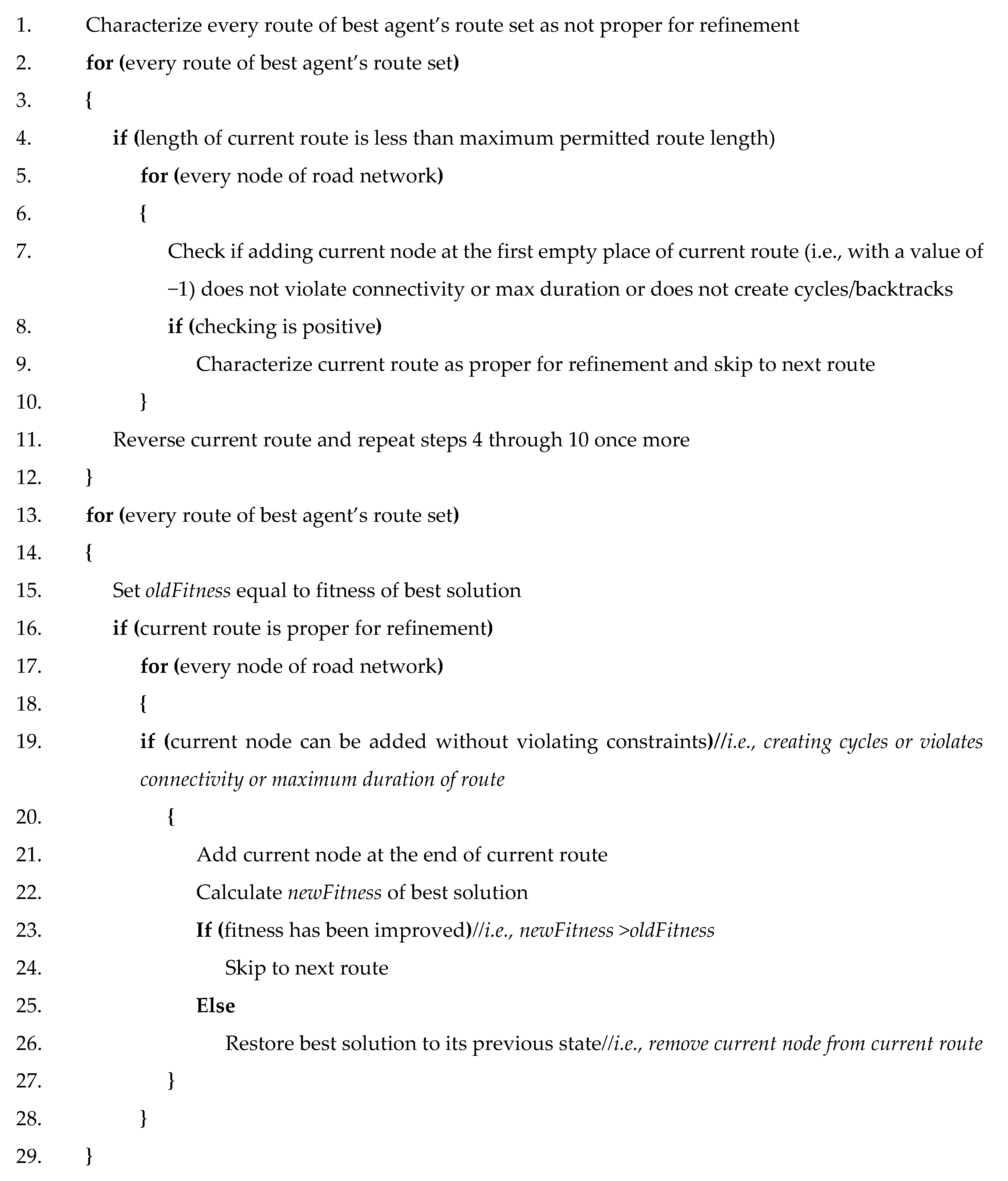
3.2. The Refinement Procedure
4. Computational Results
- Unsatisfied travel requirements (dunsatt), which should be as small as possible and ideally 0%.
- Average travelling time per user (att), which should be as small as possible and is equal to , where 0≤ i ≤ number of nodes, 0≤ j ≤ number of nodes, dij represents the transferring demands and tij symbolizes the travelling time between node i and node j, respectively, using the route set which is under evaluation (transferring delays are included). Note that this is different from Equation (4), in which we consider only the travelling demands that are satisfied by the route set, i.e., travelling demands that are satisfied with less than three transfers. Alternatively, we use the total user cost (ttc in minutes [40,42]) which also should be as small as possible.
- Percentage of travels with zero transfers (d0), which should be as large as possible and ideally 100%.
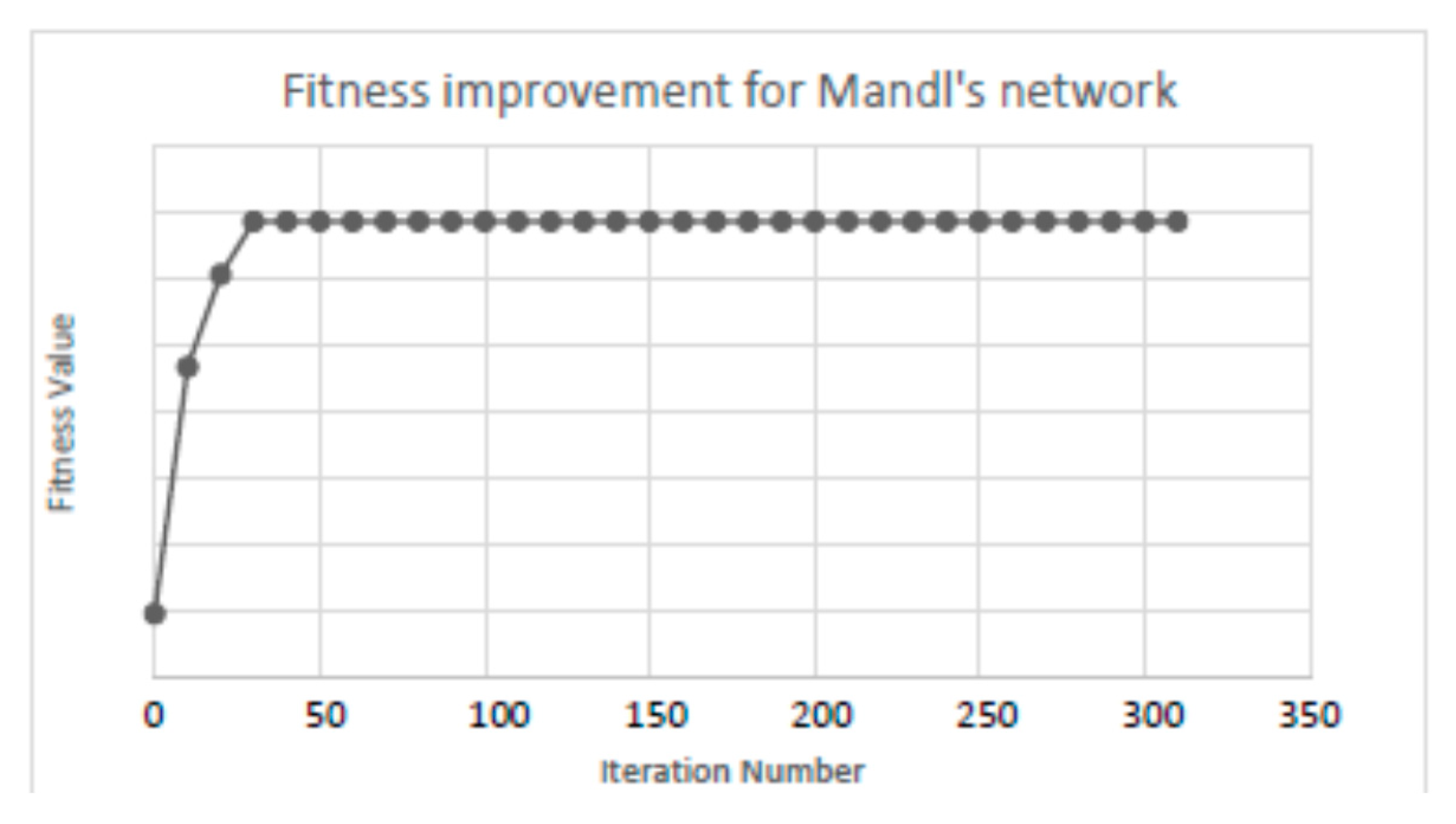
4.1. Applying CSO to Mandl’s Network Instance
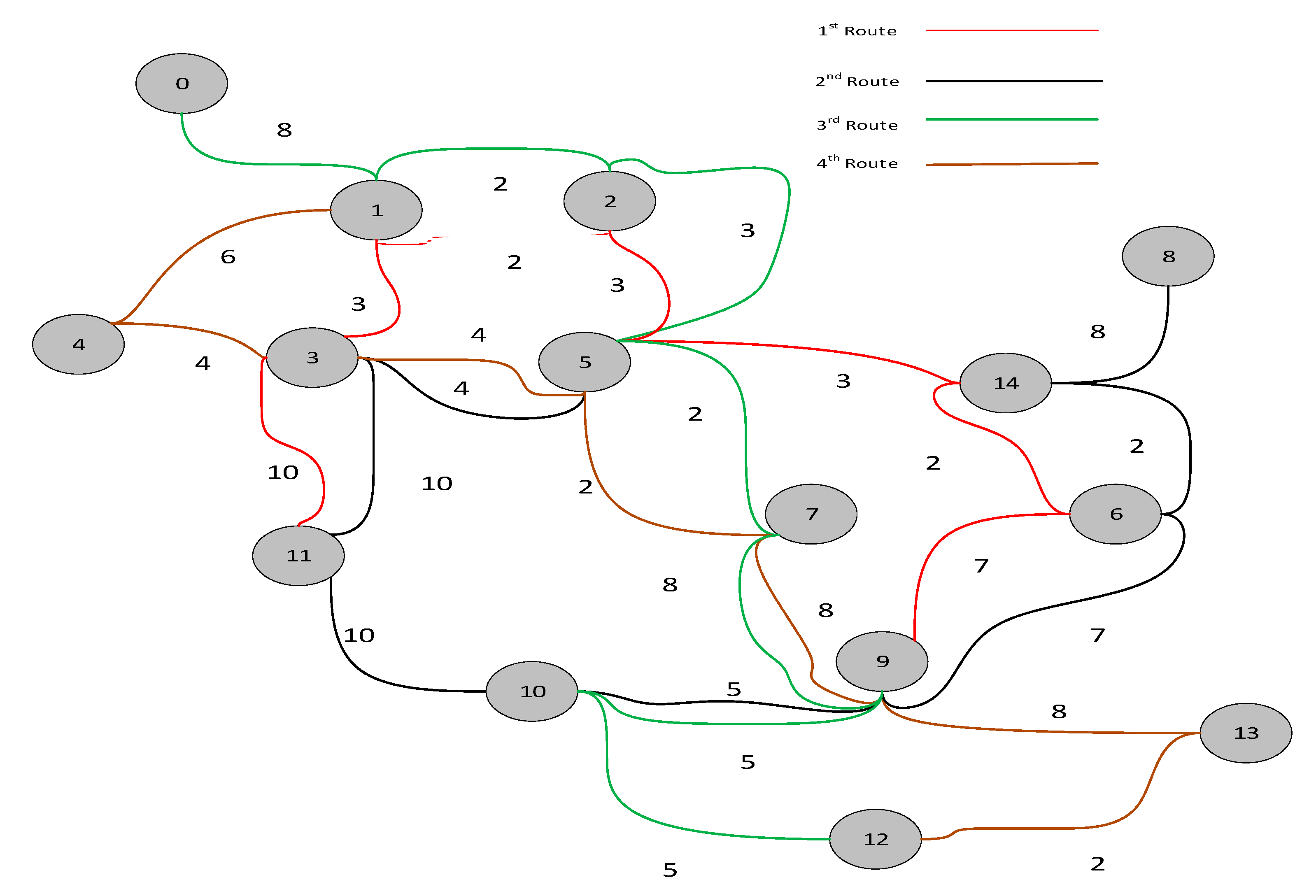
- 1st Route: {9 6 14 5 2 1 3 11}
- Route: {5 3 11 10 9 6 14 8}
- Route: {0 1 2 5 7 9 10 12}
- Route: {12 13 9 7 5 3 4 1}
- 1st Route: {0 1 2 5 14 6 9 13}
- Route: {0 1 4 3 5 7 9 10}
- Route: {0 1 2 5 7 9 10 12}
- Route: {0 1 3 11 10 12 13 9}
- Route: {4 3 11 10 9 6 14 8}
- Route: {6 14 7 5 3 11 10 12}
- 1st Route: {0 1 2 5 7 9 10 12}
- Route: {7 9 6 14 5 2 1 0}
- Route: {6 14 7 5 3 1 2 −1}
- Route: {0 1 4 3 5 7 9 10}
- Route: {5 3 11 10 9 6 14 8}
- Route: {8 14 5 2 1 4 3 11}
- Route: {0 1 3 11 10 12 13 9}
- 1st Route: {0 1 4 3 5 7 9 10}
- Route: {0 1 2 5 14 6 9 13}
- Route: {0 1 2 5 7 9 10 12}
- Route: {6 14 5 3 4 1 2 −1}
- Route: {9 10 11 3 5 7 14 6}
- Route: {9 13 12 10 11 3 1 0}
- Route: {4 3 11 10 9 6 14 8}
- Route: {8 14 5 2 1 3 11 −1}
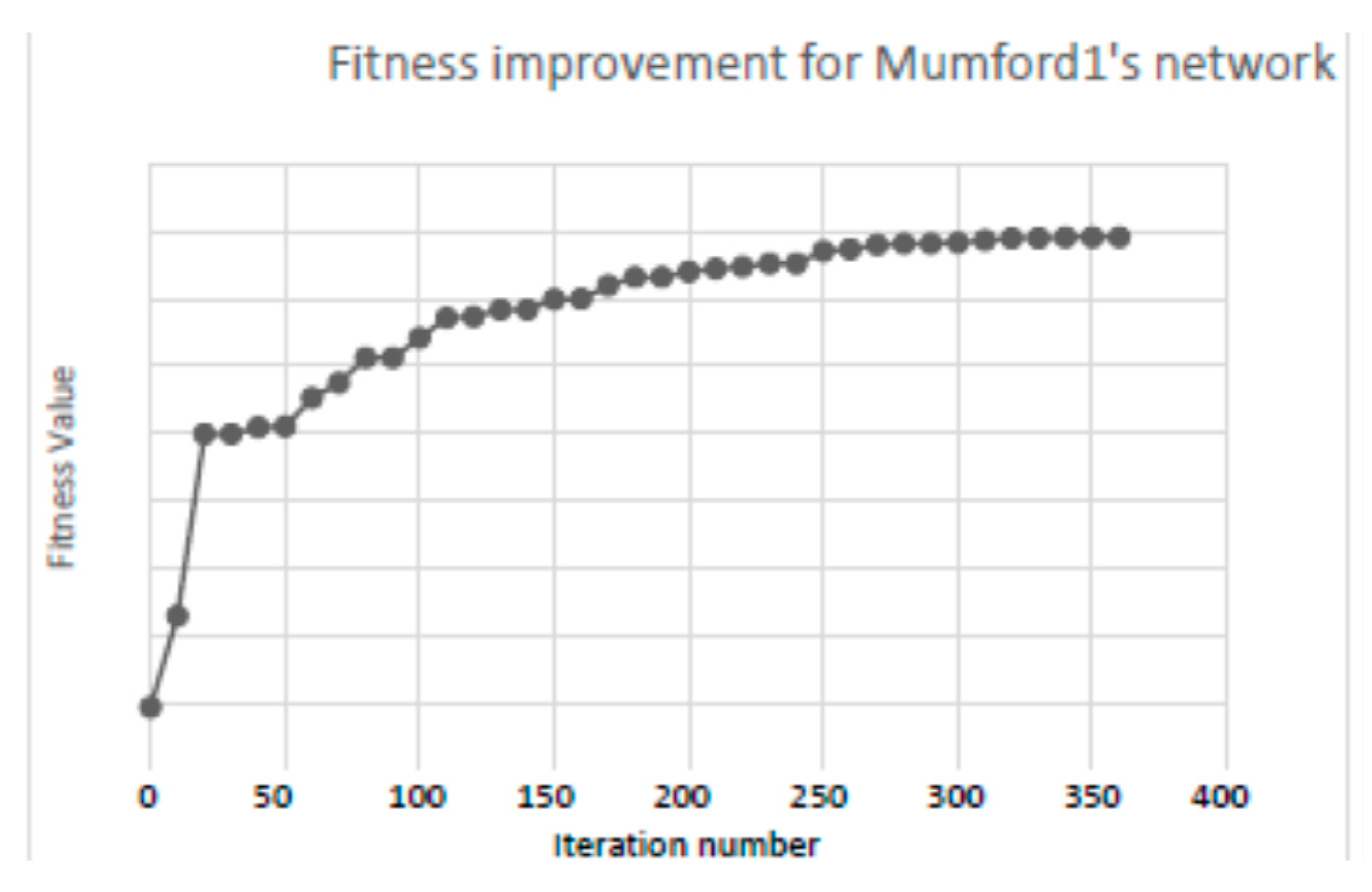
4.2. Applying CSO to Mumford’s Instances
4.3. Considering the Provider’s Operational Cost
- Total length (Ltot) in minutes of each route set, which should be as small as possible.
- Unsatisfied travel requirements (dunsatt), which should be as small as possible and ideally 0%.
- Average travelling time per user (att), which should be as small as possible.
- Percentage of travels with zero transfers (d0), which should be as large as possible and ideally 100%.
5. Conclusions—Future Work
Author Contributions
Funding
Conflicts of Interest
References
- White, P. Public Transport: Its Planning, Management and Operation, 4th ed.; Spon Press: London, UK, 2002. [Google Scholar]
- Farahani, R.Z.; Miandoabchi, E.; Szeto, W.Y.; Rashidi, H. A review of urban transportation network design problems. Eur. J. Oper. Res. 2013, 229, 281–302. [Google Scholar] [CrossRef] [Green Version]
- Mackett, R.L.; Edwards, M. The impact of new urban public transport systems: Will the expectations be met? Transp. Res. A Policy Pract. 1998, 32, 231–245. [Google Scholar] [CrossRef]
- Zeng, Q.F.; Mouskos, K.C. Heuristic Search Strategies to Solve Transportation Network Design Problems; Final Report; Department of Transportation: Trenton, New Jersey, USA, 1997.
- Stephen, S.; Liu, Z. China’s urban Transport Development Strategy. In Proceedings of the Symposium, Beijing, China, 8–10 November 1995. [Google Scholar]
- Balchin, P.N.; Bull, G.H.; Kieve, J.L. Urban Land Economics and Public Policy, 5th ed.; Palgrave Macmillan: London, UK, 1995. [Google Scholar]
- Criden, M. The Stranded Poor: Recognizing the Importance of Public Transportation for Low-Income Households; National Association for State Community Service Programs: Washington, DC, USA, 2008.
- Edwards, M.; Mackett, R.L. Developing new urban public transport systems: An irrational decision-making process. Transp. Policy 1996, 3, 225–239. [Google Scholar] [CrossRef]
- Chester, M.; Pincetl, S.; Elizabeth, Z.; Eisenstein, W.; Matute, J. Infrastructure and automobile shifts: Positioning transit to reduce life-cycle environmental impacts for urban sustainability goals. Environ. Res. Lett. 1996, 8, 015041. [Google Scholar] [CrossRef]
- INRO>Emme Transportation Forecasting Software. Available online: http://www.inrosoftware.com/en/products/emme/index.php (accessed on 23 July 2020).
- ATKINS–SATURN. Available online: http://www.saturnsoftware.co.uk/index.html (accessed on 23 July 2020).
- Vision Traffic—PTV Group. Available online: http://www.ptv-vision.com/en-uk/products/visiontraffic-suite/ptv-visum/overview/ (accessed on 23 July 2020).
- Mumford, C.L. New Heuristic and Evolutionary Operators for the Multi-Objective Urban Transit Routing Problem. In Proceedings of the IEEE Congress on Evolutionary Computation (CEC ′13), Cancun, Mexico, 20–23 June 2013; pp. 939–946. [Google Scholar]
- Yang, Z.; Yu, B.; Cheng, C. A parallel ant colony algorithm for bus network optimization. Comput.-Aided Civil Infrastruct. Eng. 2007, 22, 44–55. [Google Scholar] [CrossRef]
- Fan, L.; Mumford, C.L.; Evans, D. A Simple Multi-Objective Optimization Algorithm for the Urban Transit Routing Problem. In Proceedings of the IEEE Congress on Evolutionary Computation (CEC ′09), Trondheim, Norway, 18–21 May 2009; pp. 1–7. [Google Scholar]
- Zhang, J.; Lu, H.; Fan, L. The Multi-Objective Optimization Algorithm to a Simple Model of Urban Transit Routing Problem. In Proceedings of the Sixth International Conference on Natural Computation (ICNC ′10), Yantai, China, 10–12 August 2010; pp. 2812–2815. [Google Scholar]
- Chew, O.C.; Lee, L.S. A genetic algorithm for urban transit routing problem. Int. J. Mod. Phys. 2012, 9, 411–421. [Google Scholar] [CrossRef] [Green Version]
- Skoullis, V.I.; Tassopoulos, I.X.; Beligiannis, G.N. Solving the high school timetabling problem using a hybrid cat swarm optimization based algorithm. Appl. Soft Comput. 2017, 52, 277–289. [Google Scholar] [CrossRef]
- Bhopender, K.; Mala, K.; Poonam, S. Discrete Binary Cat Swarm Optimization for Scheduling Workflow Applications in Cloud Systems. In Proceedings of the 3rd International Conference on Computational Intelligence & Communication Technology (CICT ’17), Ghaziabad, India, 9–10 February 2017; pp. 1–6. [Google Scholar]
- Pei-Wei, T.; Lingping, K.; Snasel, V.; Jeng-Shyang, P.; Vaci, I.; Zhi-Yong, H. Utilizing Cat Swarm Optimization in Allocating the Sink Node in the Wireless Sensor Network Environment. In Proceedings of the 3rd International Conference on Computing Measurement Control and Sensor Network (CMCSN ‘16), Matsue, Japan, 20–22 May 2016; pp. 166–169. [Google Scholar]
- Razzaq, S.; Maqbool, F.; Hussain, A. Modified Cat Swarm Optimization for Clustering. In Advances in Brain Inspired Cognitive Systems; Liu, C., Hussain, A., Luo, B., Tan, K., Zeng, Y., Zhang, Z., Eds.; Springer: Cham, Switzerland, 2016; Volume 10023, pp. 161–170. [Google Scholar]
- Broderick, C.; Soto, R.; Berríos, N.; Johnson, F.; Paredes, F. Solving the Set Covering Problem with Binary Cat Swarm Optimization. In Advances in Swarm and Computational Intelligence; Tan, Y., Shi, Y., Buarque, F., Gelbukh, A., Das, S., Engelbrecht, A., Eds.; Springer: Cham, Switzerland, 2015; Volume 9140, pp. 41–48. [Google Scholar]
- Bouzidi, A.; Riffi, E.M.; Barkatou, M. Cat swarm optimization for solving the open shop scheduling problem. Int. J. Ind. Eng. 2019, 15, 367–378. [Google Scholar] [CrossRef] [Green Version]
- Kencana, E.N.; Kiswanti, N.; Sari, K. The application of cat swarm optimization in classifying small loan performance. J. Phys. Conf. Ser. 2017, 893, 012037. [Google Scholar] [CrossRef]
- Mandl, C.E. Applied Network Optimization; Academic Press: London, UK, 1979. [Google Scholar]
- Baaj, M.H.; Mahmassani, H.S. An AI-based approach for transit route system planning and design. J. Adv. Transp. 1991, 25, 187–209. [Google Scholar] [CrossRef]
- Buda, A.T.; Lee, L.S. Differential evolution for urban transit routing problem. J. Comput. Chem. 2016, 4, 11–25. [Google Scholar]
- Owais, M.; Osman, M.K. Complete hierarchical multi-objective genetic algorithm for transit network design problem. Expert Syst. Appl. 2018, 114, 143–154. [Google Scholar] [CrossRef]
- Buda, A.T.; Lee, L.S. Hybrid differential evolution-particle swarm optimization for multiobjective urban transit network design problem with homogeneous buses. Math. Probl. Eng. 2019, 2019, 5963240. [Google Scholar]
- Nayeem, M.A.; Islam, M.M.; Yao, X. Solving transport network design problem using many-objective evolutionary approach. IEEE Trans. Intell. Transp. Syst. 2019, 20, 3952–3963. [Google Scholar] [CrossRef]
- Chakroborty, P.; Wivedi, T. Optimal Route Network Design for transit systems using genetic algorithms. Eng. Optimiz. 2002, 34, 83–100. [Google Scholar] [CrossRef]
- Jha, S.B.; Jha, J.; Tiwari, M. A multi-objective meta-heuristic approach for transit network design and frequency setting problem in a bus transit system. Comput. Ind. Eng. 2019, 130, 166–186. [Google Scholar] [CrossRef]
- Iliopoulou, C.; Kepaptsoglou, K.; Vlachogianni, E.I. Metaheuristics for the transit route network design problem: A review and comparative analysis. Public Transp. 2019, 11, 487–521. [Google Scholar] [CrossRef]
- Kim, M.; Kho, S.-Y.; Kim, D.-K. A transit route network design problem considering equity. Sustainability 2019, 11, 3527. [Google Scholar] [CrossRef] [Green Version]
- Iliopoulou, C.; Tassopoulos, I.; Kepaptsoglou, K.; Beligiannis, G. Electric transit route network design problem: Model and application. Transp. Res. Record 2019, 2673, 264–274. [Google Scholar] [CrossRef]
- Kidwai, F.A. Optimal Design of Bus Transit Network: A Genetic Algorithm Based Approach. Ph.D. Thesis, Department of Civil Engineering, Indian Institute of Technology, Kanpur, India, 1998. [Google Scholar]
- Fan, L.; Mumford, C.L. A metaheuristic approach to the urban transit routing problem. J. Heuristics 2010, 16, 353–372. [Google Scholar] [CrossRef]
- Nayeem, M.A.; Rahman, M.K.; Rahman, M.S. Transit network design by genetic algorithm with elitism. Transp. Res. Part C 2014, 46, 30–45. [Google Scholar] [CrossRef]
- Kilic, F.; Gok, M. A demand based route generation algorithm for public transit network design. Comput. Oper. Res. 2014, 51, 21–29. [Google Scholar] [CrossRef]
- Nikolic, M.; Teodorovic, D. A simultaneous transit network design and frequency setting: Computing with bees. Expert Syst. Appl. 2014, 41, 7200–7209. [Google Scholar] [CrossRef]
- Nikolic, M.; Teodorovic, D. Transit network design by Bee Colony Optimization. Expert Syst. Appl. 2013, 40, 5945–5955. [Google Scholar] [CrossRef]
- Zhao, H.; Jiang, R. The Memetic algorithm for the optimization of urban transit network. Expert Syst. Appl. 2015, 42, 3760–3773. [Google Scholar] [CrossRef]
- Kechagiopoulos, P.N.; Beligiannis, G.N. Solving the Urban Transit Routing Problem using a particle swarm optimization based algorithm. Appl. Soft Comput. 2014, 21, 654–676. [Google Scholar] [CrossRef]
- Balcombe, R. The Demand for Public Transport: A Practical Guide; Transportation Research Laboratory: London, UK, 2004. [Google Scholar]
- Emerson, B. Design and Planning Guidelines for Public Transport Infrastructure: Bus Route Planning and Transit Streets; Public Transport Authority: Washingtion, DC, USA, 2003.
- Mandl, C.E. Evaluation and optimization of urban public transport networks. Eur. J. Oper. Res. 1980, 5, 396–404. [Google Scholar] [CrossRef]
- Zhao, F.; Gan, A. Optimization of Transit Network to Minimize Transfers; Final Report; Florida Department of Transportation: Tallahassee, FL, USA, 2003.
- Israeli, Y.; Ceder, A. Designing Transit Routes at the Network Level. In Proceedings of the IEEE Vehicle Navigation and Information Systems Conference (VNIS’89), Toronto, ON, Canada, 11–13 September 1989; pp. 310–316. [Google Scholar]
- Newell, G.F. Some issues relating to the optimal design of bus routes. Transp. Sci. 1979, 13, 20–35. [Google Scholar] [CrossRef]
- Shu-Chuan, C.; Pei-Wei, T.; Pan, J.S. Cat Swarm Optimization. In Proceedings of the 9th Pacific Rim International Conference on Artificial Intelligence; Yang, Q., Webb, G., Eds.; Springer: Berlin/Heidelberg, Germany, 2006; Volume 4099, pp. 1513–1523. [Google Scholar]
- Fister, J.; Yang, X.-S.; Fister, I.; Brest, J.; Fister, D. A Brief Review of Nature-Inspired Algorithms for Optimization. Elektron. Vestn. 2013, 80, 1–7. [Google Scholar]
- Shu-Chuan, C.; Pei-Wei, T. Computational Intelligence Based On The Behavior Of Cats. Int. J. Innov. Comput. Inf. Control 2007, 3, 163–173. [Google Scholar]
- Solving the Urban Transit Routing Problem Using A Cat Swarm Optimization Based Algorithm. Available online: http://www.deapt.upatras.gr/CSO-UTRP/CSO-UTRP.htm (accessed on 23 July 2020).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 0 | 400 | 200 | 60 | 80 | 150 | 75 | 75 | 30 | 160 | 30 | 25 | 35 | 0 | 0 |
| 400 | 0 | 50 | 120 | 20 | 180 | 90 | 90 | 15 | 130 | 20 | 10 | 10 | 5 | 0 |
| 200 | 50 | 0 | 40 | 60 | 180 | 90 | 90 | 15 | 45 | 20 | 10 | 10 | 5 | 0 |
| 60 | 120 | 40 | 0 | 50 | 100 | 50 | 50 | 15 | 240 | 40 | 25 | 10 | 5 | 0 |
| 80 | 20 | 60 | 50 | 0 | 50 | 25 | 25 | 10 | 120 | 20 | 15 | 5 | 0 | 0 |
| 150 | 180 | 180 | 100 | 50 | 0 | 100 | 100 | 30 | 880 | 60 | 15 | 15 | 10 | 0 |
| 75 | 90 | 90 | 50 | 25 | 100 | 0 | 50 | 15 | 440 | 35 | 10 | 10 | 5 | 0 |
| 75 | 90 | 90 | 50 | 25 | 100 | 50 | 0 | 15 | 440 | 35 | 10 | 10 | 5 | 0 |
| 30 | 15 | 15 | 15 | 10 | 30 | 15 | 15 | 0 | 140 | 20 | 5 | 0 | 0 | 0 |
| 160 | 130 | 45 | 240 | 120 | 880 | 440 | 440 | 140 | 0 | 600 | 250 | 500 | 200 | 0 |
| 30 | 20 | 20 | 40 | 20 | 60 | 35 | 35 | 20 | 600 | 0 | 75 | 95 | 15 | 0 |
| 25 | 10 | 10 | 25 | 15 | 15 | 10 | 10 | 5 | 250 | 75 | 0 | 70 | 0 | 0 |
| 35 | 10 | 10 | 10 | 5 | 15 | 10 | 10 | 0 | 500 | 95 | 70 | 0 | 45 | 0 |
| 0 | 5 | 5 | 5 | 0 | 10 | 5 | 5 | 0 | 200 | 15 | 0 | 45 | 0 | 0 |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 1st Route: | 1 | 3 | 5 | 14 | 6 | 9 | 10 | 12 | 13 |
| 2nd Route: | 4 | 1 | 2 | 5 | 7 | 9 | 10 | −1 | −1 |
| 3rd Route: | 2 | 5 | 3 | 11 | 10 | 12 | −1 | −1 | −1 |
| 4th Route: | 1 | 3 | 5 | 7 | −1 | −1 | −1 | −1 | −1 |
| 5th Route: | 8 | 14 | 6 | 9 | 13 | −1 | −1 | −1 | −1 |
| Parameter. | Value |
|---|---|
| Number of Iterations | 300 + nodes of the network |
| Initial Number of Agents | 1000, 1000, 648, 288, 135 |
| Number of Active Agents | 500, 500, 335, 135, 50 |
| MR | 0.04 |
| Size of SMP | 10 |
| xm | 20.0 |
| K1 | 10.0 |
| b1 | −0.04 |
| A | 1.0 |
| b2 | 1.0 |
| A | 1.0 |
| B | 1.0 |
| C | 1.0 |
| K2 | 10.0 |
| b3 | −0.3 |
| K3 | 10.0 |
| ω1 | 1.0 |
| ω2 | 1.0 |
| ω3 | |
| K4 | 10.0 |
| ω4 | 1.0 |
| b4 | −0.05 |
| x4m | 20.0–200.0 |
| Network Name | Mandl | Mumford0 | Mumford1 | Mumford2 | Mumford3 |
|---|---|---|---|---|---|
| Number of Nodes | 15 | 30 | 70 | 110 | 127 |
| Number of Edges | 21 | 90 | 210 | 385 | 425 |
| Total Transfer Demands | 15,570 | 342,160 | 1,926,170 | 4,847,900 | 6,934,950 |
| Lower Bound for Average Travelling Time per User (mins) [13] | 10.0058 | 13.0121 | 19.2695 | 22.1689 | 24.7453 |
| Required Number of Routes per Route Set | 4-6-7-8 | 12 | 15 | 56 | 60 |
| Maximum Number of Nodes per Route | 8 | 15 | 30 | 22 | 25 |
| Minimum Number of Nodes per Route | 3 | 2 | 10 | 10 | 12 |
| Maximum Length per Route (mins) | 50 | - | - | - | - |
| Artificial (A) or Real (R) | R | A | R | R | R |
| Solution with Four Routes | |||||||
|---|---|---|---|---|---|---|---|
| d0(%) | d1(%) | d2(%) | dunsatt(%) | att(mpu) | ttc(mpu) | ||
| Mandl [25] | 69.94 | 29.93 | 0.13 | 0.00 | 12.90 | ||
| Kidway [36] | 72.95 | 26.91 | 0.13 | 0.00 | 12.72 | ||
| Chakroborty and Wivedi [31] | 79.38 | 17.60 | 3.02 | 0.00 | 11.52 | ||
| Chakroborty and Wivedi (published) | 86.86 | 12.00 | 1.14 | 0.00 | 11.90 | ||
| Fan and Mumford [37] | 93.26 | 6.74 | 0.00 | 0.00 | 11.37 | ||
| Fan, Mumford and Evans [15] | 90.88 | 8.35 | 0.77 | 0.00 | 10.65 | ||
| Nikolic and Teodorovic [41] | 92.1 | 7.19 | 0.71 | 0.00 | 10.51 | ||
| Kilic and Gok [39] | 91.33 | 8.16 | 0.51 | 0.00 | 10.56 | ||
| Zhang, Lu and Fan [16] | 91.46 | 8.54 | 0.00 | 0.00 | 10.65 | ||
| Hang Zhao et. al [42] | 93.77 | 6.23 | 0.00 | 0.00 | 206,770 | ||
| Chew and Lee [17] | 93.71 | 6.29 | 0.00 | 0.00 | 10.82 | ||
| Kechagiopoulos and Beligiannis [43] | 91.84 | 7.64 | 0.51 | 0.00 | 10.64 | ||
| CSO | Best | 91.52 | 7.77 | 0.71 | 0.00 | 10.54 | 144,650 |
| Worst | 91.2 | 8.8 | 0.00 | 0.00 | 10.81 | 144,320 | |
| Average | 89.605 | 9.985 | 0.414 | 0.00 | 10.6765 | ||
| Std | 1.815 | 1.826 | 0.419 | 0.00 | 0.0749 | ||
| Solution with Six Routes | ||||||
|---|---|---|---|---|---|---|
| d0(%) | d1(%) | d2(%) | dunsatt(%) | att(mpu) | ||
| Kidway [36] | 77.92 | 19.62 | 2.40 | 0.00 | 11.87 | |
| Chakroborty and Wivedi [31] | 86.04 | 13.96 | 0.00 | 0.00 | 10.30 | |
| Fan and Mumford [37] | 91.52 | 8.48 | 0.00 | 0.00 | 10.48 | |
| Fan, Mumford and Evans [15] | 93.19 | 6.23 | 0.58 | 0.00 | 10.46 | |
| Zhang, Lu and Fan [16] | 91.12 | 8.88 | 0.00 | 0.00 | 10.50 | |
| Kilic and Gok [39] | 95.50 | 4.50 | 0.00 | 0.00 | 10.29 | |
| Chew and Lee [17] | 95.57 | 4.43 | 0.00 | 0.00 | 10.28 | |
| Nikolic and Teodorovic [41] | 95.63 | 4.37 | 0.00 | 0.00 | 10.23 | |
| Kechagiopoulos and Beligiannis [43] | 96.15 | 3.73 | 0.13 | 0.00 | 10.22 | |
| Mumford [13] | 94.54 | 5.14 | 0.32 | 0.00 | 10.33 | |
| Baaj and Mahmassani [26] | 78.61 | 21.39 | 0.00 | 0.00 | 11.86 | |
| CSO | Best | 96.21 | 3.66 | 0.13 | 0.00 | 10.22 |
| Worst | 95.25 | 4.75 | 0.00 | 0.00 | 10.32 | |
| Average | 95.95 | 4.012 | 0.038 | 0.00 | 10.2655 | |
| Std | 0.584 | 0.562 | 0.079 | 0.00 | 0.031 | |
| Solution with Seven Routes | ||||||
|---|---|---|---|---|---|---|
| d0(%) | d1(%) | d2(%) | dunsatt(%) | att(mpu) | ||
| Kidway [36] | 93.91 | 6.09 | 0.00 | 0.00 | 10.70 | |
| Chakroborty and Wivedi [31] | 89.15 | 10.85 | 0.00 | 0.00 | 10.15 | |
| Fan and Mumford [37] | 93.32 | 6.36 | 0.32 | 0.00 | 10.42 | |
| Fan, Mumford and Evans [15] | 92.55 | 6.68 | 0.77 | 0.00 | 10.44 | |
| Zhang, Lu and Fan [16] | 92.89 | 7.11 | 0.00 | 0.00 | 10.46 | |
| Chew and Lee [17] | 95.57 | 4.43 | 0.00 | 0.00 | 10.27 | |
| Kilic and Gok [39] | 97.04 | 2.83 | 0.83 | 0.00 | 10.23 | |
| Nikolic and Teodorovic [41] | 98.52 | 1.48 | 0.00 | 0.00 | 10.15 | |
| Kechagiopoulos and Beligiannis [43] | 97.17 | 2.83 | 0.00 | 0.00 | 10.16 | |
| Baaj and Mahmassani [26] | 80.99 | 19.01 | 0.00 | 0.00 | 12.50 | |
| CSO | Best | 97.94 | 2.06 | 0.00 | 0.00 | 10.12 |
| Worst | 97.11 | 2.89 | 0.00 | 0.00 | 10.23 | |
| Average | 97.422 | 2.579 | 0.00 | 0.00 | 10.1895 | |
| Std | 0.705 | 0.705 | 0.00 | 0.00 | 0.0350 | |
| Solution with Eight Routes | ||||||
|---|---|---|---|---|---|---|
| d0(%) | d1(%) | d2(%) | dunsatt(%) | att(mpu) | ||
| Kidway [36] | 84.73 | 15.27 | 0.00 | 0.00 | 11.22 | |
| Chakroborty and Wivedi [31] | 90.38 | 9.58 | 0.00 | 0.00 | 10.46 | |
| Fan and Mumford [37] | 94.54 | 5.46 | 0.00 | 0.00 | 10.36 | |
| Fan, Mumford and Evans [15] | 91.33 | 8.67 | 0.00 | 0.00 | 10.45 | |
| Zhang, Lu and Fan [16] | 93.14 | 6.86 | 0.00 | 0.00 | 10.42 | |
| Kilic and Gok [39] | 97.37 | 2.63 | 0.00 | 0.00 | 10.20 | |
| Nikolic and Teodorovic [41] | 98.97 | 1.03 | 0.00 | 0.00 | 10.09 | |
| Chew and Lee [17] | 97.82 | 2.18 | 0.00 | 0.00 | 10.19 | |
| Kechagiopoulos and Beligiannis [43] | 97.75 | 2.25 | 0.00 | 0.00 | 10.13 | |
| Baaj and Mahmassani [26] | 79.96 | 20.04 | 0.00 | 0.00 | 11.86 | |
| CSO | Best | 98.97 | 1.03 | 0.00 | 0.00 | 10.08 |
| Worst | 99.04 | 0.96 | 0.00 | 0.00 | 10.17 | |
| Average | 98.478 | 1.523 | 0.00 | 0.00 | 10.125 | |
| Std | 0.397 | 0.397 | 0.00 | 0.00 | 0.0309 | |
| Solution with Four Routes | ||||||
|---|---|---|---|---|---|---|
| d0 (%) | d1 (%) | d2 (%) | dunsatt (%) | att (mpu) | ttc (mpu) | |
| Nikolic and Teodorovic [40] (11 nodes) | 95.05 | 4.95 | 0.00 | 0.00 | 186,368 | |
| CSO (11 nodes) | 93.77 | 5.72 | 0.51 | 0.00 | 146,320 | |
| Muhammed et al. [38] (13 nodes) | 95.83 | 3.60 | 0.57 | 0.00 | 10.35 | |
| CSO (13 nodes) | 96.27 | 3.73 | 0.00 | 0.00 | 10.31 | |
| Solution with Six Routes | ||||||
|---|---|---|---|---|---|---|
| d0 (%) | d1 (%) | d2 (%) | dunsatt (%) | att (mpu) | ttc (mpu) | |
| Nikolic and Teodorovic [40] (11 nodes) | 94.34 | 5.65 | 0.00 | 0.00 | 185,224 | |
| CSO (11 nodes) | 97.43 | 2.57 | 0.00 | 0.00 | 153,510 | |
| Muhammed et al. [38] (13 nodes) | 98.91 | 1.09 | 0.00 | 0.00 | 10.10 | |
| CSO (13 nodes) | 98.84 | 1.16 | 0.00 | 0.00 | 10.10 | |
| Solution with Seven Routes | ||||||
|---|---|---|---|---|---|---|
| d0 (%) | d1 (%) | d2 (%) | dunsatt (%) | att (mpu) | ttc (mpu) | |
| Nikolic and Teodorovic [40] (11 nodes) | 94.41 | 5.59 | 0.00 | 0.00 | 185,405 | |
| CSO (11 nodes) | 98.27 | 1.73 | 0.00 | 0.00 | 153,120 | |
| Muhammed et al. [38] (13 nodes) | 99.55 | 0.45 | 0.00 | 0.00 | 10.07 | |
| CSO (13 nodes) | 99.36 | 0.64 | 0.00 | 0.00 | 10.06 | |
| Solution with Eight Routes | ||||||
|---|---|---|---|---|---|---|
| d0 (%) | d1 (%) | d2 (%) | dunsatt (%) | att (mpu) | ttc (mpu) | |
| Nikolic and Teodorovic [40] (11 nodes) | 96.40 | 3.60 | 0.00 | 0.00 | 185,590 | |
| CSO (11 nodes) | 98.33 | 1.67 | 0.00 | 0.00 | 154,100 | |
| Muhammed et al. [38] (13 nodes) | 99.86 | 0.14 | 0.00 | 0.00 | 10.03 | |
| CSO (13 nodes) | 99.61 | 0.39 | 0.00 | 0.00 | 10.04 | |
| d0(%) | d1(%) | d2 (%) | dunsatt(%) | att (mpu) | |
|---|---|---|---|---|---|
| Mumford (our evaluation) | 59.21 | 38.00 | 2.79 | 0.00 | 16.22 |
| Mumford (published) [13] | 63.20 | 35.82 | 0.98 | 0.00 | 16.05 |
| Kilic and Gok [39] | 69.73 | 30.03 | 0.24 | 0.00 | 14.99 |
| CSO | 64.34 | 35.18 | 0.49 | 0.00 | 15.23 |
| d0(%) | d1(%) | d2 (%) | dunsatt (%) | att (mpu) | |
|---|---|---|---|---|---|
| Mumford (our evaluation) | 35.01 | 51.84 | 12.83 | 0.32 | 24.80 |
| Mumford (published) [13] | 36.60 | 52.42 | 10.71 | 0.26 | 24.79 |
| Kilic and Gok [39] | 45.10 | 49.08 | 5.76 | 0.06 | 23.33 |
| CSO | 38.02 | 55.36 | 6.62 | 0.00 | 23.66 |
| d0(%) | d1 (%) | d2 (%) | dunsatt (%) | att (mpu) | |
|---|---|---|---|---|---|
| Mumford (our evaluation) | 28.84 | 50.14 | 19.02 | 2.00 | 28.67 |
| Mumford (published) [13] | 30.92 | 51.29 | 16.26 | 1.44 | 28.65 |
| Kilic and Gok [39] | 33.88 | 57.18 | 8.77 | 0.17 | 26.82 |
| CSO | 30.00 | 56.21 | 13.54 | 0.25 | 27.72 |
| d0(%) | d1 (%) | d2 (%) | dunsatt(%) | att (mpu) | |
|---|---|---|---|---|---|
| Mumford (our evaluation) | 25.61 | 49.24 | 21.28 | 3.87 | 31.66 |
| Mumford (published) [13] | 27.46 | 50.97 | 18.76 | 2.81 | 31.44 |
| Kilic and Gok [39] | 27.56 | 53.25 | 17.51 | 1.68 | 30.41 |
| CSO | 25.76 | 50.86 | 21.96 | 1.42 | 30.92 |
| Kechagiopoulos and Beligiannis [43] | CSO | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| x4m | d0 | d1 | d2 | dunsatt | att | Ltot | d0 | d1 | d2 | dunsatt | att | Ltot |
| 20 | 68.45 | 24.73 | 6.51 | 0.30 | 13.69 | 75.53 | 65.354 | 24.801 | 8.615 | 1.23 | 14.3915 | 72.05 |
| 40 | 68.68 | 25.35 | 5.83 | 0.13 | 13.79 | 76.03 | 63.922 | 27.3 | 8.071 | 0.729 | 14.5495 | 71.6 |
| 60 | 71.71 | 24.06 | 4.12 | 0.11 | 13.18 | 77.00 | 65.7 | 28.498 | 5.502 | 0.302 | 14.0675 | 72.35 |
| 80 | 75.37 | 21.97 | 2.47 | 0.18 | 12.40 | 80.20 | 69.299 | 26.577 | 4.11 | 0.013 | 13.584 | 73.55 |
| 100 | 84.28 | 14.92 | 0.33 | 0.46 | 11.41 | 98.50 | 70.279 | 26.179 | 3.517 | 0.026 | 13.4155 | 73.85 |
| 120 | 89.66 | 9.60 | 0.65 | 0.10 | 10.94 | 116.77 | 70.851 | 25.797 | 3.301 | 0.052 | 13.318 | 74.15 |
| 140 | 90.21 | 9.13 | 0.66 | 0.00 | 10.77 | 133.04 | 71.268 | 26.198 | 2.522 | 0.013 | 13.263 | 74.45 |
| 160 | 89.96 | 9.11 | 0.93 | 0.00 | 10.71 | 141.70 | 72.433 | 24.689 | 2.877 | 0.00 | 12.994 | 76.1 |
| 180 | 90.66 | 8.61 | 0.73 | 0.00 | 10.72 | 143.88 | 71.701 | 24.912 | 3.386 | 0.00 | 13.1835 | 74.9 |
| 200 | 90.47 | 8.71 | 0.82 | 0.00 | 10.71 | 139.96 | 72.877 | 24.279 | 2.846 | 0.00 | 12.9765 | 75.35 |
| Kechagiopoulos and Beligiannis [43] | CSO | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| x4m | d0 | d1 | d2 | dunsatt | Att | Ltot | d0 | d1 | d2 | dunsatt | att | Ltot |
| 80 | 74.07 | 23.5 | 2.38 | 0.05 | 13.4 | 82.45 | 71.79 | 24.80 | 3.38 | 0.03 | 13.42 | 74.00 |
| 100 | 82.3 | 16.34 | 1.36 | 0.00 | 13.06 | 95.20 | 69.67 | 26.58 | 3.71 | 0.04 | 13.54 | 72.85 |
| 120 | 87.63 | 11.53 | 0.84 | 0.00 | 11.48 | 114.05 | 72.67 | 24.00 | 3.32 | 0.00 | 13.32 | 74.40 |
| 140 | 90.56 | 8.80 | 0.65 | 0.00 | 10.90 | 131.60 | 73.84 | 23.85 | 2.32 | 0.02 | 13.12 | 74.10 |
| 160 | 90.78 | 8.60 | 0.62 | 0.00 | 10.83 | 142.40 | 72.70 | 24.23 | 3.07 | 0.00 | 13.09 | 75.90 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Katsaragakis, I.V.; Tassopoulos, I.X.; Beligiannis, G.N. Solving the Urban Transit Routing Problem Using a Cat Swarm Optimization-Based Algorithm. Algorithms 2020, 13, 223. https://doi.org/10.3390/a13090223
Katsaragakis IV, Tassopoulos IX, Beligiannis GN. Solving the Urban Transit Routing Problem Using a Cat Swarm Optimization-Based Algorithm. Algorithms. 2020; 13(9):223. https://doi.org/10.3390/a13090223
Chicago/Turabian StyleKatsaragakis, Iosif V., Ioannis X. Tassopoulos, and Grigorios N. Beligiannis. 2020. "Solving the Urban Transit Routing Problem Using a Cat Swarm Optimization-Based Algorithm" Algorithms 13, no. 9: 223. https://doi.org/10.3390/a13090223
APA StyleKatsaragakis, I. V., Tassopoulos, I. X., & Beligiannis, G. N. (2020). Solving the Urban Transit Routing Problem Using a Cat Swarm Optimization-Based Algorithm. Algorithms, 13(9), 223. https://doi.org/10.3390/a13090223