1. Introduction
Managing distribution networks is a challenging task for decision-makers. The specific challenge in this field is the complex structure of a typical network, which is a multi-echelon system with horizontal and vertical shortcuts in combination with huge numbers of nodes as well as transported parts, each kind of which is defined as a stock keeping unit (SKU). In addition, this kind of logistics operates in a highly volatile environment, requiring continuous adaptations by the responsible managers who need to conduct frequent maintenance and improvement decisions, especially on tactical horizons. In practice, decision-makers face a substantial number of potential improvement actions, spanned by the huge number of objects that can and have to be combined for suitable maintenance of the network [
1,
2]. Furthermore, conflicting goals, such as simultaneously maintaining a high service level and low costs, characterized by specifically defined key performance indicators (KPIs) [
3], add to the complexity of the problem. Short delivery times versus low costs as well as a large number of delivered SKUs by their due date versus a large number of fully completed orders are other examples of conflicting goals in the network.
The first challenge is the specific shape of the problem. Traditional parameter optimisation tasks—easily found in the broad literature—are described by a given (finite) number of parameters, each with a given number of possible values. The size of the solution space, in this case, is defined as the product of the number of all parameters. However, in the network covered in this paper, there is an (in principle) unlimited number of actions to change the network, each of which could be any of a given limited set of actions, applied to any of the object combinations. Therefore, traditional algorithms are not applicable because of the daunting combinatorics. Just as an example, traditionally a parameter entry of the algorithm stands for a specific characteristic of the underlying system. Here, however, it only stands for any kind of action. Therefore, it is also the case that the sequence of the elements is clearly relevant, in contrast to the cases that are usually found in the state-of-the-art literature.
Due to their complexity, real-world networks cannot obtain a closed mathematical formulation of the goal functions [
4]. Therefore, an application might resort to a three-stage solution procedure. In the first stage, changes to the system are defined that are expected to keep or even improve the KPIs. In the second stage, a discrete event simulation (DES) model [
5] is run to determine basic logistical data, such as throughput times, in-time delivery, or utilisation of resources. In the last stage, these data are used as in the real world to calculate the KPIs, which then serve to judge the quality of the changes that have been set up in the first stage.
This three-stage process can, of course, be conducted manually by human experts, but there have been a number of trials to automate the optimisation of distribution networks. Unfortunately, due to the huge solution space, there is again no closed mathematical formulation to find a minimum or maximum of the desired KPIs, leading to the necessity of applying heuristic algorithms, which do not deliver the optimum, but—hopefully—a “suitably good” solution in finite time [
6,
7]. Specific heuristics would raise extremely high development and implementation effort for such complex applications. Therefore, reported implementations exploit metaheuristics, often biology-inspired, such as evolutionary algorithms [
8]. Metaheuristics are optimisation algorithms that are—at least up to a point—independent of the specific application problem, with the great advantage that new developments can be exploited for a multitude of applications, and, thus, very sophisticated and efficient algorithms are available.
The scientific solution approach applied in this paper is consequently the method of simheuristics [
9], which combines DES used as an evaluation function with metaheuristics for the optimisation. The major drawback of this approach is the time to produce promising action proposals. The tremendous time requirements originate from the huge solution space described before in combination with the significant runtimes of the complex simulation models [
10], the latter being in the range of minutes to even hours per single run.
There have been very different approaches proposed to face this problem. Optimisation of the metaheuristics performance itself is hardly promising, as the processing of these algorithms covers only a very minor part of the total run time—by far the major part is covered by the DES. An obvious idea is to develop advanced simulation models that can evaluate the distribution system faster. Alternatives address the effort to obtain statistical relevance, for example, find better controls for the number of required replications or adapt such numbers to the degree that a specific solution seems to be promising [
11,
12,
13]. This article explores two different innovative ways.
Actually, the real performance challenge is not to minimise the effective computation time
of the computer resource, but to reduce the time required to present a decision proposal
, defined as the time span between the availability of data and the provision of acceptable solution proposals. With metaheuristics, such as an evolutionary algorithm (EA) [
7],
can only be reduced with respect to
when additional resources are applied. For example, using four computer processors instead of one will cut
to about 25% of
. With ten computers, it will reduce to about 10% (assuming that the distribution overhead is negligible). However, the tactical decisions are performed, for example, once per month with a decision request three days after availability of field data in the data warehouse. Thus, ten computers might idle 27 days waiting for the next decision request. The solution approach is to apply machine learning, where a learning algorithm is operating for 90% of the time, and in the concrete decision situation the acquired knowledge is used to quickly find promising solutions. We consider deep reinforcement learning for this purpose, as it allows us to estimate the impact of specific changes, even if these have never been simulated in the past, by using the “fuzzier” knowledge within the deep learning’s neural network [
14,
15].
The second innovative idea is to get domain-specific information (DSI) back into our metaheuristic algorithm [
16]. We analyse three different approaches to use contextual information for the acceleration of the heuristics machine. One approach exploits experience from previous (actual or simulated) applications of actions, following the idea that actions that have shown to be helpful in the past might lead to good results in the future as well. This method also allows us to exploit the idle time between the decision periods to collect experience about the actions’ success and, thus, to improve the forecast power of the success indicators. A second approach uses the classification of actions that either change the network’s structure or else just its parameters, assuming that structural changes would be more targeted if applied among the first actions of the action plan. The last idea assumes that the actions are not independent, and one action being performed will influence the impact of further actions. In this approach, the correlation among actions is computed for data from the past and projected into future action plans. Again, idle time can be used to calculate and continuously improve the correlation indicators.
Finally, the number of simulation runs could be reduced, and we discuss two ways towards this goal. On the one hand, different action plans are analysed to determine whether they can be predicted to gain identical results without the need to simulate both of them. This would lead to performance improvement without reducing the result quality (or, from a different point of view, to achieve better results within the same time frame). On the other hand, the reduction of the solution space itself by grouping actions into fewer selectable items is considered [
17]. It can be assumed that this approach, quite usual in real-world decision making, will lead to a significant reduction of simulation runs. However, the reduction of the research space might exclude some even better solutions, which in fact could be acceptable if the method leads to better solutions within a limited given time frame.
For all these approaches, we have developed suitable implementations and evaluated them with subsets of real-world data. In this paper, we give an overview of the implementation, present exemplary results, and make conclusions about the suitability of the investigated approaches. The paper is organised as follows—
Section 2 presents the related work and
Section 3 the considered optimisation approaches.
Section 4 introduces the general ideas and architecture of the developed logistics assistance system, and it clarifies the relationship to real-world data.
Section 5,
Section 6 and
Section 7 discuss the above-mentioned approaches one by one, followed by an evaluation of the novel concepts in an evaluation based on real-world data in
Section 8. The discussion relates the major findings to the previous state of the art and derives future research paths, followed by a summary of the achievements in
Section 9.
4. Solution Architecture
4.1. A Logistics Assistance System
A logistics assistance system has been developed to assist decision-makers in distribution networks using the Python programming language [
16]. This LAS utilises basic components related to a transactional system in a distribution network, such as Enterprise Resource Planning.
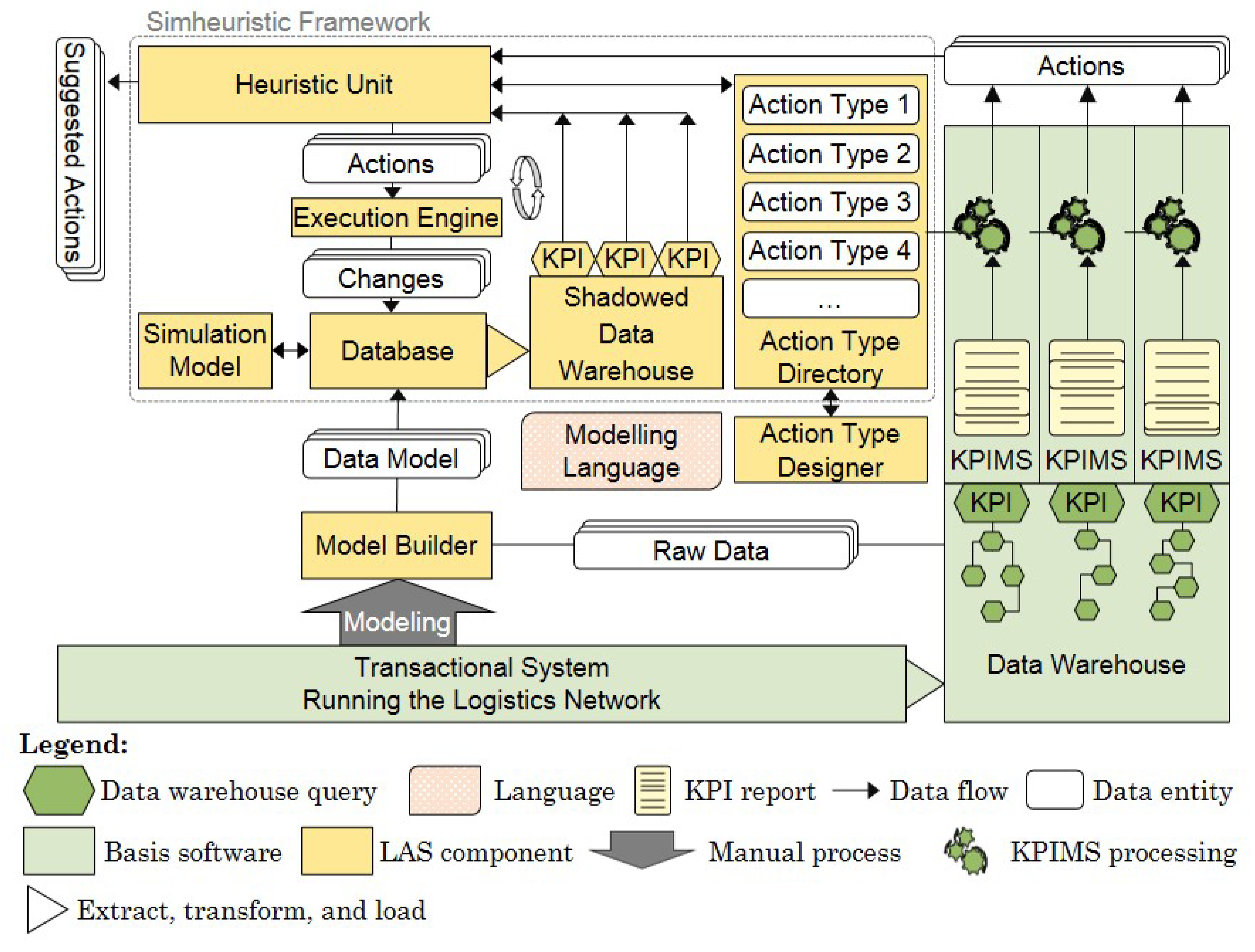
Figure 1 shows the architecture of the LAS. The data are extracted from the transactional system and loaded into a data warehouse. KPIs are calculated, and any deterioration of the value of a KPI beyond the previously assigned limit triggers an alert in a corresponding key performance indicator management system (KPIMS) [
67]. These systems recommend potential actions that are designed to improve the value of the KPI. A recommended action by the KPIMS is expected to increase the intrinsic value of the KPI that triggers the alert, but it could reduce the intrinsic value of other KPIs. Since each of the KPIMS recommends actions independently from the others, the LAS aims to consider the impact of the actions on the entire network and improve the network’s performance as a whole.
In addition, the data are extracted from the transactional system by the model builder into a data model to form the database of a data-driven simulation tool (
Figure 1). Rabe and Dross (2015) proposed the use of data-driven simulation tools to apply actions using SQL statements, such as SimChain, which is a generic supply chain simulation model based on the Siemens Plant Simulation tool [
69]. The developers of the LAS used SimChain to model a similar distribution network previously [
70].
In the LAS, actions are derived from action types [
71], which are defined by simulation experts. An action type represents a generic description of an action, for example, centralising an SKU in a site without specifying the SKU and the site. To derive actions from the action types, input parameters are specified, for example, SKU 1 in site A. Action types are defined in the action type designer by decision-makers of the LAS using a domain-specific modelling language. The action types are stored in an action type directory that can be accessed by the KPIMS and the heuristic unit in the simheuristic framework (cf.
Figure 1). The actions recommended by the KPIMS and the actions derived from action types form the search space of actions for the heuristic unit.
In the heuristic unit, the simheuristic approach is represented by simulation and a metaheuristic algorithm. The metaheuristic algorithm explores the search space and constructs action plans to be evaluated. The changes applied by actions are executed as SQL statements in the database. These data are then transferred to a “shadowed data warehouse”, which mimics the calculation of the operational KPI, but for simulated data. The shadowed data warehouse is introduced in order to avoid any potential mix-up of the simulated (experimental) data with the real operational data sets. The (simulated) KPIs calculated from the shadowed data warehouse form the objective values to be optimised by the metaheuristic. The construction and evaluation continue until a termination condition is met. Then, suggested actions as an action plan are recommended to decision-makers, who are the main users of the LAS.
4.2. Semantic Model for Action Types in Wholesale Logistics Networks
To increase the LAS’s flexibility and usability, decision-makers can model and integrate user-generated action types. For this purpose, decision-makers can utilize a specifically developed domain-specific modelling language, which is tailored to the model of action types in wholesale logistics networks. Accessing the developed domain-specific modelling language can be performed via the Action Type Designer, an integrated development interface (IDE), providing all benefits of common IDEs such as code completion or syntax highlighting.
All action types are based on the same semantic model. Therefore, the semantic model of an action type must be capable of representing all required information for all possible action types in a logistics network. Action types can be instantiated by adding type-specific parameters to the semantic model’s attributes [
72].
The attributes of the semantic model serve different purposes and are, thus, divided into different categories. The first category of attributes has informative purposes, such as the action type’s name, description, id, the owner’s id, and a list of ids for representing the involved modellers.
Action types represent changes to the underlying simulation model. For the specification of these changes, functional attributes are used. The attribute input is used to define the affected entities of the logistics network. To specify the effects on those entities, statements of the domain-specific modelling language are used.
Meta information of action types is stored in meta-attributes of the semantic model. For example, it may take some time to fully execute a set of actions in the real logistics network. Therefore, the required time for executing actions is stored in the attribute time till effect. Additionally, executing an action may entail costs. The costs of an action are stored in the attribute total costs.
The semantic model additionally includes domain-specific information [
68,
73,
74], for example, the
frequency or the
impact of an action type on the logistics network, which can be stored in corresponding attributes of the model. Changes to the network can be categorised into two different groups,
structural and
parametrical changes. A structural change alters the structure of the network, for instance, adding new routes, sites, or SKUs to a site. Actions that affect attributes of the logistics network’s entities are categorised as parametrical, for example, increasing the safety stock or changing the frequency of a route. In addition,
correlations between different action types and their actions’ impact on the network can be modelled. For example, when “centralising an assortment”, “increasing the safety stock” of any centralised SKU might be a promising candidate for further actions. Thus, a positive relation is defined between “centralise” and “increase the safety stock”.
After the parameterisation of an action type, the corresponding derived actions can be stored in the semantic model’s attribute
actions. An overview of the semantic model is given in
Table 1.
4.3. Abstracting the Modelling of Action Types from the Underlying Simulation’s Data Base
Actions are closely related to the underlying simulation’s data model, resulting in multiple issues. Modelling action types requires in-depth knowledge of the database’s structure, for example, for specifying the areas of the database that are affected by applying corresponding actions. Another issue arises when the database’s structure changes, for example, when the simulation software is updated or a new simulation tool is introduced. To address these problems, the authors propose to decouple the modelling of action types from the underlying simulation data model [
75].
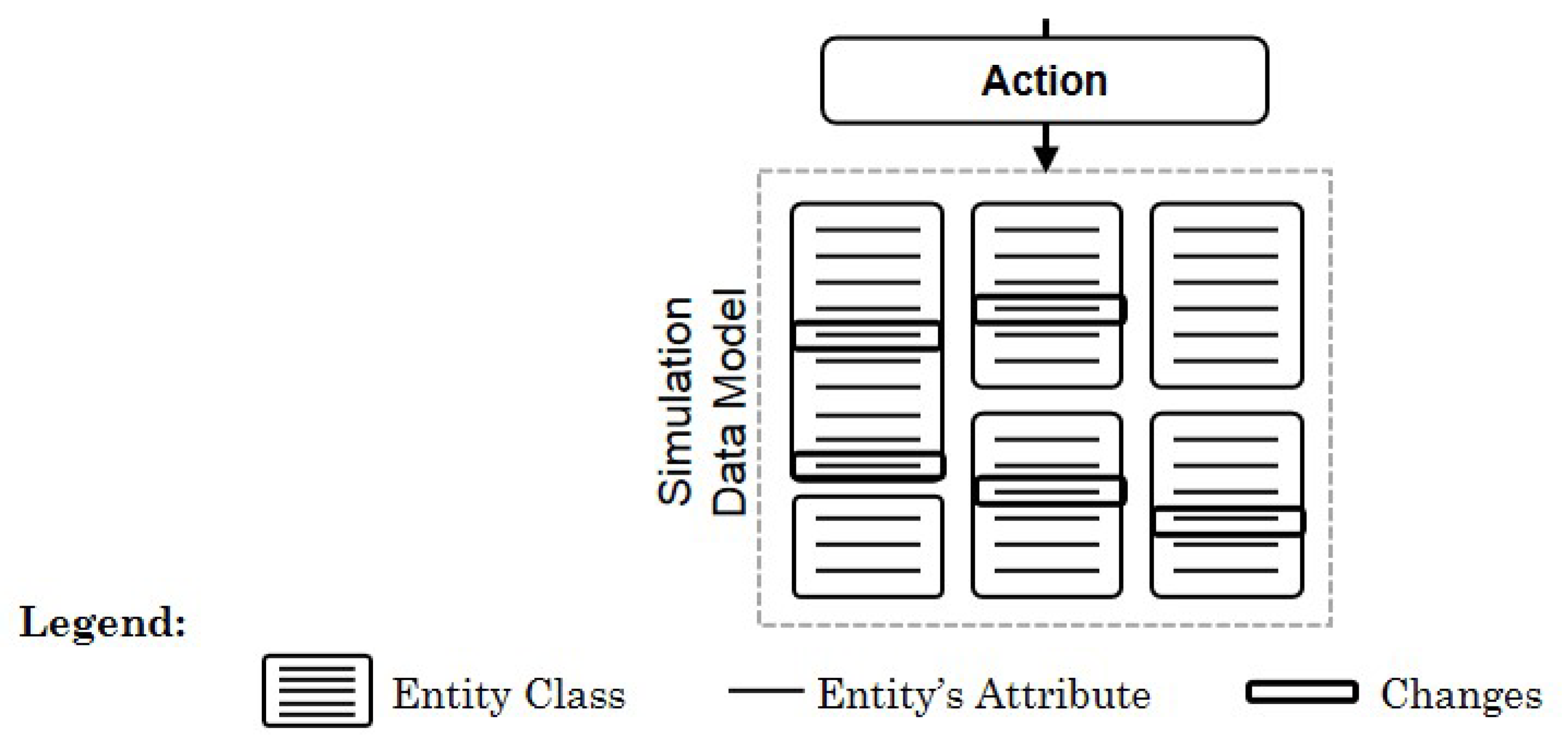
When applying an action, a set of corresponding entities of the logistics network needs to be adapted, accordingly. In a data-driven simulation, an entity can be described by entries in a database’s table. To identify the correct entities, the table’s name and the entities’ attributes are defined as part of statements in the modelling process of an action type (
Section 4.2). Thus, when applying an action, multiple entries in the database might be changed (
Figure 2).
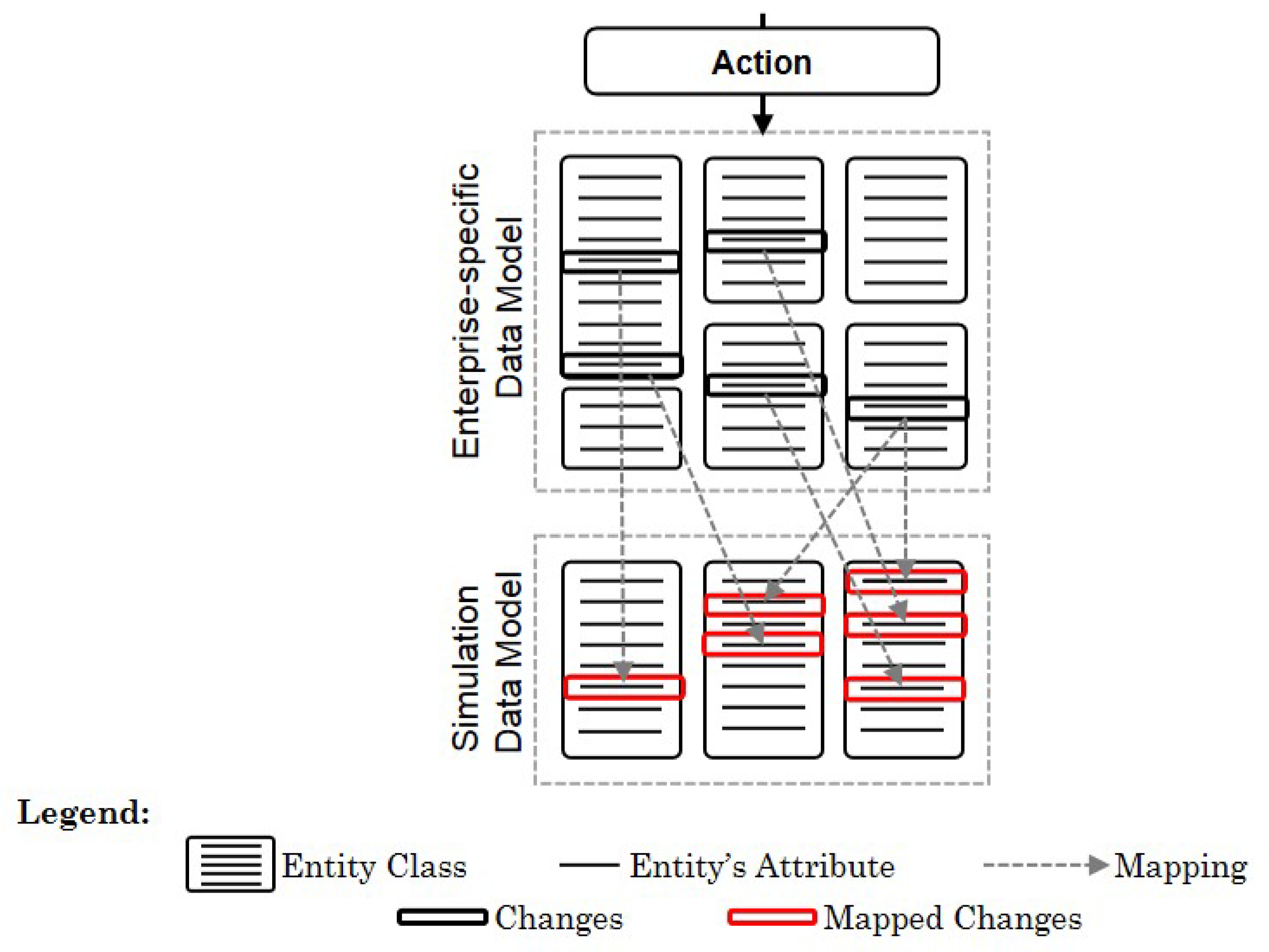
However, the simulation’s database and, therefore, the data model, are typically predefined by the simulation tool that is being used. Thus, the data model is not easily adjustable. When decoupling the modelling of action types from the data model of the underlying simulation, an additional data model is required: an enterprise-specific data model. This enterprise-specific data model can be structured in the way that best suits the decision-makers’ knowledge and needs.
Using an enterprise-specific data model, action types can be specified against this model and not against the simulation data model. To correctly convert actions into changes to the simulation data model, each attribute of the simulation data model must be distinctly linked to the corresponding attribute of the enterprise-specific data model (
Figure 3). Such a mapping can be defined, for example, in the form of a JSON-file. In the process of executing an action, the information for the mapping between the two models is read from the JSON-file, so that changes can be applied to the simulation data model, accordingly [
75].
By utilizing this approach, action types can be modelled against an enterprise-specific data model, which can be adapted to the modellers’ knowledge and needs. This approach allows decision-makers to become modellers and to specify action types against a common data structure and with known names of the entities and their attributes. Another advantage of this approach is that when the simulation data model changes, only the mapping must be adjusted and not all the definitions of the action types. This saves resources, reduces the risk of faults, and improves the acceptance of the method in general.
5. Addressing the Performance Challenge: Deep Reinforcement Learning
As mentioned above, creating an algorithm that is able to master a varied range of challenging tasks by teaching itself in a trial-and-error procedure is one of the major goals of reinforcement learning. Reinforcement learning in general considers tasks in which an agent interacts with an environment through a sequence of observations, actions, and rewards. To use reinforcement learning successfully in situations approaching real-world complexity, however, agents are confronted with a challenge: they have to derive efficient representations of the environment from high-dimensional sensory inputs and use these to generalize past experiences to new situations (cf.
Section 3.2). The authors of Reference [
15] approached this challenge by creating an algorithm that used a Deep Q-Network (DQN) as the central value function approximation.
Almost all reinforcement learning algorithms are based on estimating value functions. The algorithm used for the DQN agent, Q-learning, is based on the Q-function, a function of state-action pairs that expresses how beneficial it is for the agent to perform a given action in a given state with respect to the expected return [
76]. More formally, the Q-function expresses the value of taking an action
a in a state
s under a policy
with respect to the expected return starting from
s, taking the action
a, and thereafter following policy
. For small problems, the Q-function can be stored as a table, but for larger problems, this table quickly gets too large to be stored in memory. Moreover, the time and data required to fill the table accurately would be too high. In many tasks to which one would like to apply reinforcement learning, most states encountered will never have been experienced exactly in the same way before. The only way to learn anything at all in these cases is to generalize from previously experienced states to ones that have never been seen before. Hence, for larger problems, the key issue is that some sort of function approximation is included. In this regard, advances in deep neural networks have made it possible to approximate the Q-function, for example, with a CNN.
Mnih et al. [
15] tested an agent with a DQN on the Arcade Learning Environment (ALE), which is a software framework designed to simplify the development of agents that play arbitrary Atari 2600 games and, therefore, offers a method to evaluate the development of general, domain-independent reinforcement learning agents [
77]. Its source code is publicly available on the Internet [
78]. Through the ALE, researchers have access to several dozen games through a single common interface. Eighteen actions can be input to the game via a digital joystick: three positions of the joystick for each axis, plus a single button. The DQN approach of Reference [
15] outperformed the best existing reinforcement learning methods on 43 of the 49 games without incorporating any of the additional prior knowledge about the Atari 2006 games used by other approaches. In conclusion, the DQN algorithm trained itself and reached super-human performance just by using the game pixels as the observation and the game score as the reward signal from the environment.
The work by Mnih et al. [
15] inspired the authors to test the DQN agent as a reinforcement learning approach to the performance challenge, as discussed earlier in this article (cf.
Section 1). For the experiments, the general working principles of the DQN agent have been retained, but the parameters of this agent have been slightly adjusted. The implementation of the DQN has been built with the Python API for TensorFlow, an open-source software library for numerical computations using data flow graphs [
79]. After the reinforcement learning agent applies an action to the database, the simulation model is instantiated and the simulation is run as described above. A reward calculation function generates the reward signal from the simulation output data by computing a scalar reward signal, using the changes in costs and performance. The reward signal is then routed back to the DQN for training [
80]. In order to express the state
s of the logistics system configuration as an image, a feature extraction function selects the different features from the tables in the MySQL database and composes them into an image (
Figure 4).
The image has been designed to look similar to an Atari game screen in order to make the problem accessible for the DQN agent. The general idea behind the design of the state representation as an image is to profit from the research regarding further domain-independent agents in the future.
Since the agent needs to learn a mapping from states to actions, the state representation also needs to encode information that enables for concluding from states to actions. For instance, if the agent is intended for learning to make a decision regarding the inventory, useful information to make such a decision, for example, inventory levels and customer demands, needs to be included in the state representation. For actions regarding, for example, machines, other information is needed in the state representation. Thus, the information needed in the state representation heavily depends on the action types available in the system (see
Section 4.2). Consequently, the features that have to be selected from the MySQL database for the state
s are derived from the action types used. In order to address the requirements regarding the scalability of the state representation, the state image is built from different image segments. Each segment corresponds to a segment type, similar to the previously explained relationship between actions and action types. The size of each segment is fixed. The actual segment size is derived from the size of the largest segment type. The overall design was chosen to enable the CNN to more easily identify patterns within the state data.
In order to generate a scalar reward signal for the reinforcement learning agent, a decrease in the total costs after taking an action is translated into a positive reward. An increase in the total costs, on the other hand, is translated into a negative reward. Furthermore, besides the bare costs, the difference in the logistics performance before and after applying the action is also incorporated into the reward. The authors have decided to define a penalty cost that is multiplied with the percentage change in the service level. If the service level decreases, a penalty is generated. If the service level increases, a bonus payment is generated. The service level costs are meant to express the loss of customer orders in the future due to unsatisfied customers, or the increase of customer orders from satisfied customers. The difference in the logistics costs and the service level costs are summed up and interpreted as the total costs caused by an action. Finally, these total costs are scaled down to generate the final reward signal, which is sent back to the agent. The scaling is done to get as close as possible to the architecture used in the original DQN implementation.
6. Addressing the Performance Challenge: Exploiting Domain-Specific Information
The performance of the LAS can be evaluated based on the impact of the recommended action plans on the distribution network and on the number of simulation runs. This section focuses on guiding the metaheuristic algorithm in the heuristic unit to find promising actions to be added to the action plan. The approach investigates the potential actions and explores information to guide the search. This information is called domain-specific information and is added to the action type definitions, such as the type of changes, success, and correlation (
Section 4.2) [
68,
73,
74].
6.1. Utilizing the Characteristics of Action Type Classes
The first illustrated DSI concerns the type of changes applied by an action. An action can change a parametrical value of an entity in a distribution network, for example, the stock level of an SKU at a site. Actions of this kind are called parametrical actions. For example, an action that increases the stock level of SKU 1 at site A is a parametrical action.
Other actions might add an entity to the network or delete an entity. These actions cause structural changes in the network, such as centralising SKU 1 at site A. These actions cause structural and parametrical changes. Centralising SKU 1 at site A is realised by several changes, for example, adding SKU 1 to site A if it is not at site A, removing SKU 1 from the other sites, establishing transport relations between site A and the other sites if not currently existing, and specifying the parametrical values of SKU 1 at site A. This action should define the parametrical values for the newly added entities, for example, SKU 1 at site A, and the transport relations between site A and the other sites.
Accordingly, actions are classified as structural or parametrical based on their type of changes. Structural actions cause significant changes in the network. Their changes delete the impact of previously applied parametrical actions if they affect the same entity in the network. For example, action increases the stock level of SKU 1 at site B, and centralises SKU 1 at site A. Action removes SKU 1 at site B from the network when it is applied. If follows , the change in the stock level caused by is removed by removing the entity by .
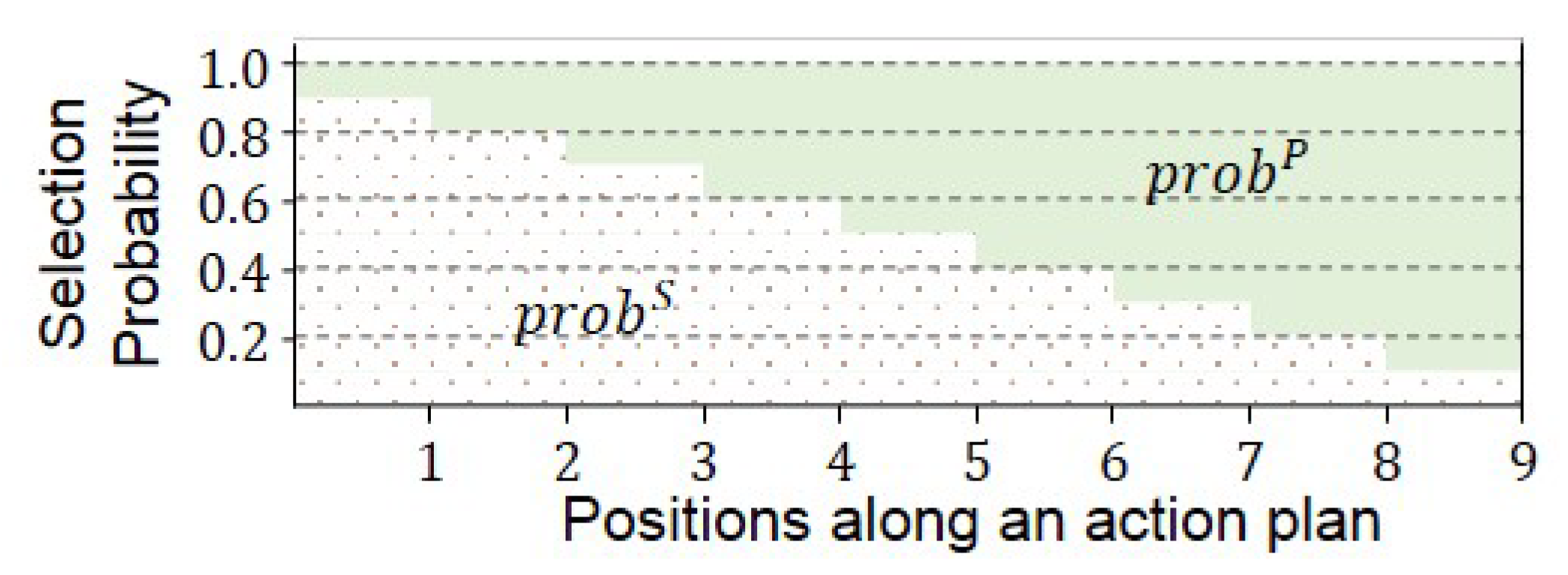
In order to consider the structural and parametrical changes in the selection of actions, the selection probability of an action is biased according to its type of changes and its position in an action plan. Structural actions are preferred at the beginning of an action plan and parametrical actions at its end.
Figure 5 shows a proposed probability distribution of actions’ types of changes that changes linearly along the length of an action plan,
l. In Equations (
1) and (
2),
is the selection probability of structural actions at position
i of an action plan. If structural changes are selected, a structural action is selected from the potential structural actions.
6.2. Building on Success Experience
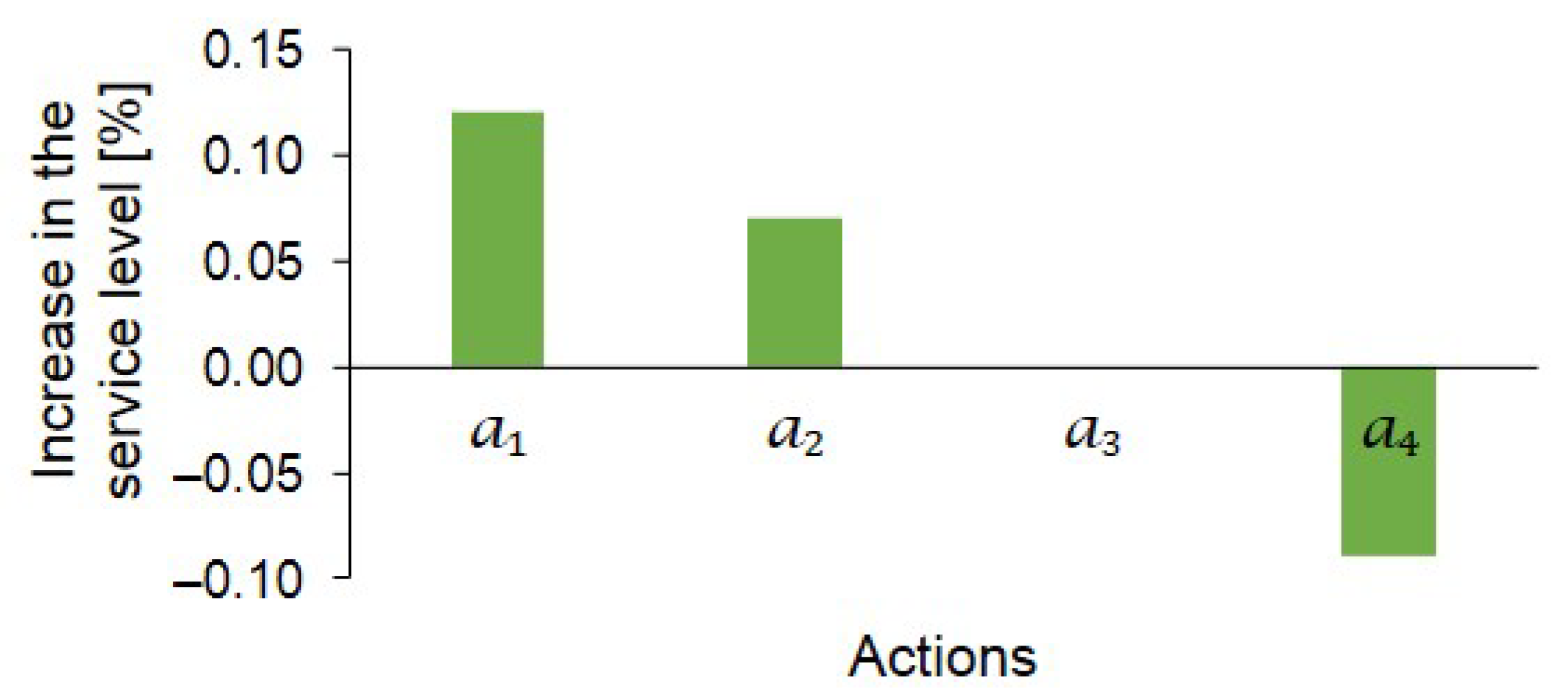
Another DSI is the success of actions in improving the performance of a distribution network. The term success is defined with respect to an action. The impact of an action on a network is investigated to determine whether it increases or decreases the performance measures. For example,
Figure 6 shows actions,
and
, that increase the service level and an action,
, that reduces the service level. Actions that increase the service level get a higher success value than the actions that decrease the service level. Within the actions that increase the service level, their impact of the actions varies, and accordingly, their success value varies, such as
and
in
Figure 6.
Actions with a high success value tend to increase the performance of the network, and hence, increasing their selection probability might guide the metaheuristic algorithm to construct promising action plans. Actions with a high success value get a higher selection probability than actions with a lower success value. For example, the selection probabilities of the actions in
Figure 6 might be assigned as 0.32, 0.28, 0.24, and 0.16 to actions
,
,
, and
, respectively.
While the success values of concrete actions can only be measured for the single and parametrized actions themselves, these values cannot be expected to contribute to the performance improvement, directly, because there is a low probability that the specific current action has already been evaluated before and, thus, owns a success attribute. Therefore, success may have to be regarded only indirectly: Measured success values of actions are summarized for the respective action types, and this success attribute of the action types is then used to steer the construction of action plans. With this procedure, action types are preferred if the associated actions have often led to improvements in the past.
6.3. Defining Relations between Actions
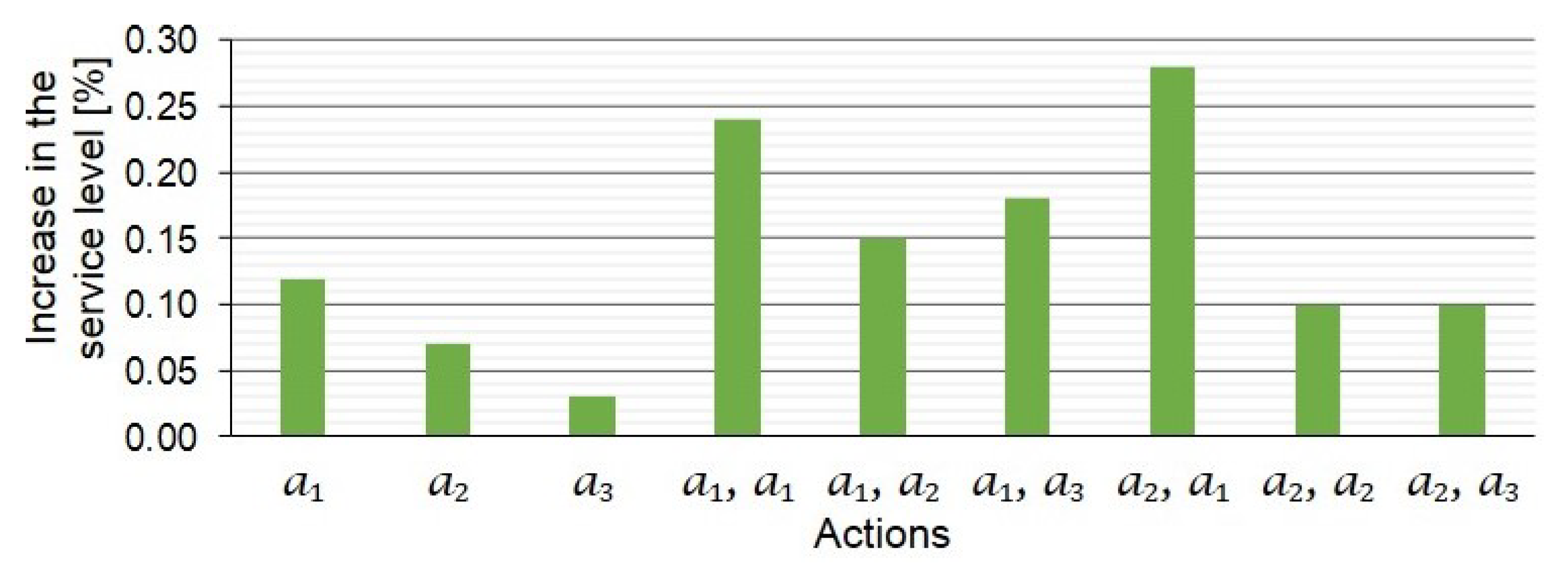
The last DSI that we propose is the correlation between two actions and their impact on the performance of the network. In this context, the joint impact of a sequence of two actions on the performance of a network is compared to their expected impact if they are applied individually. In
Figure 7, the expected impact of applying actions
and
is an increase of 0.19% in the service level, given by the summation of the impact of the single actions
(0.12%) and
(0.07%). Actually, the sequence
followed by
increases the service level by only 0.15%. Thus, applying these two actions as
has a negative influence (“−”). The sequence
causes an increase in the service level by 0.28%. Thus, it has a positive impact (“+”) compared to the expected impact of the single actions. Another example of the positive impact is the sequence
. If the expected impact of a sequence does not differ from the actual impact, the relation is a weak relation (“∼”), for example, sequence
in
Figure 7.
The correlation between actions could be tabulated in a correlation matrix. Rows represent the first applied action in the sequence, and columns represent the second applied action. The cells show the relation between the impact of a sequence of actions and their expected impact on the network as “+”, “∼”, and “−” for positive, weak, and negative relations, respectively. The relations extracted from
Figure 7 are tabulated in
Table 2. The rest of the correlation matrix shows relations between other actions in the search space.
The cell between and is a duplication of an action. An action can be duplicated by applying it twice. If an action increases the stock level of an SKU at a site by 10 units, its duplication increases the stock level by 20 units. Accordingly, the performance of the network is affected and might vary from the expected impact.
Similar to the previous section, applying actions affects the performance of the network, and their impact might be used to guide the selection of actions to construct promising action plans. The selection probability of actions is increased if the actions are in a positive relation with already selected actions. For example, if action
is selected, then the recommended action is
to increase the service level (
Table 2). Selecting
does not increase the service level as expected, and selecting
does not influence the expected increase in the value. Thus, the selection probability of
becomes higher than
.
7. Addressing the Performance Challenge: Reducing the Number of Evaluations
Another performance measure of the LAS is the number of simulation runs, which we define to be the number of objective function evaluations. In order to reduce the number of evaluations of the objective function, a selective evaluation might be performed, or evaluations might be skipped. In this research, the evaluation of the impact of an action plan is skipped if the action plan has previously been evaluated [
81].
Previously evaluated action plans might be identical to newly formed action plans, or they can be equivalent to them. Equivalent action plans have an identical impact on the performance of the distribution network, but are not identical action plans.
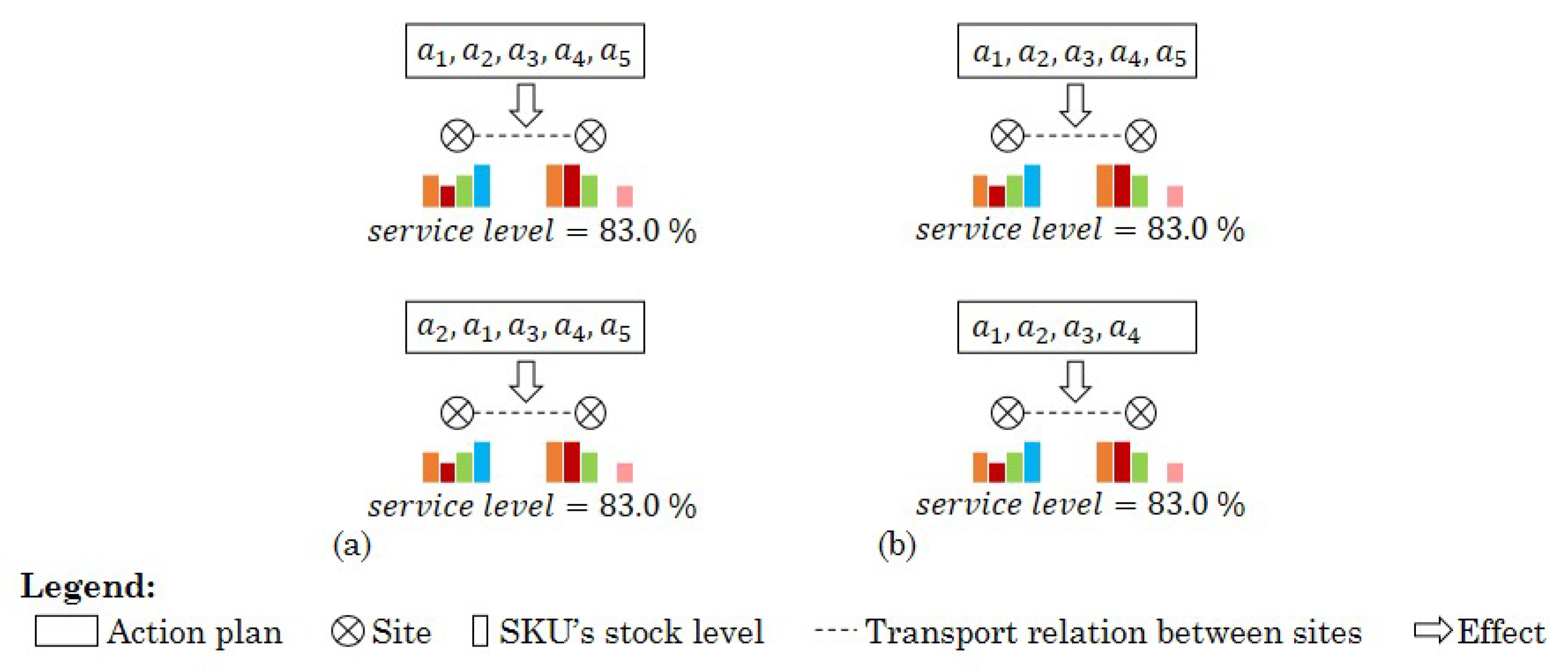
Figure 8 shows an example of equivalent action plans. These action plans cause the same changes in the network and, hence, result in the same impact on the performance. The performance of an equivalent action plan can directly be used, without again evaluating the performance of the newly formed plan.
In order to identify equivalent action plans we define interchangeable and redundant actions. Interchangeable actions can be reordered in an action plan without affecting the impact of the action plan on the performance of the network (
Figure 8a). Actions
and
in
Figure 8a have been reordered without affecting the applied changes and the impact of the action plan on the service level;
and
are interchangeable actions. Actions that affect different entities in the network can be reordered without affecting the impact of the action plan. These actions are interchangeable if they do not interfere with an overall parameter of the network, such as the capacity of a site. For example,
increases the stock level of SKU 1 at site A, and
increases the stock level of SKU 2 at site A. Both actions affect different entities in the network, SKU 1 at site A and SKU 2 at site A. Applying the changes by any of the actions does not affect the changes applied by the other action. However, if the total capacity of site A reaches its limit after applying any of these actions, the resulting applied changes differ when the actions are swapped.
Redundant actions can be removed from the action plan without affecting the impact of the action plan on the distribution network (
Figure 8b). Action
has been removed from the action plan in
Figure 8b. The resulting action plan applies the same changes as the original action plan, without removing
, and the service remains unchanged. Action
is a redundant action, because its removal has no effect on the changes applied in the network. These actions can be duplicated structural actions. A structural action adds or removes entities from the network, and its duplication repeats these changes without causing additional changes in the network. A duplicated parametrical action that causes incremental changes is not redundant, because it causes an incremental increase or decrease in the value of the affected parameter.
Defining the equivalent action plans based on interchangeable and redundant actions enables skipping the evaluation of an action plan. An action plan is rated as its equivalent action plan that was evaluated previously.
Another approach reduces the number of actions to reduce the number of evaluations. In this approach, actions are grouped. The grouped actions replace actions and form a smaller search space of actions to be explored. For example, if two actions are grouped, the search space of actions can be reduced from 100 actions to 50 actions. Exploring the search space of 50 actions obviously requires a smaller number of evaluations.
The grouping criteria might be defined by the decision-maker, for example, grouping actions that affect SKUs based on an SKU assortment at a site [
17]. For example, a distribution network has two sites, site A and site B. Assortment 1 includes SKU 1 and SKU 2, and assortment 2 includes SKU 3 and SKU 4. Then, action
that increases the stock level of SKU 1 at site A and action
that increases the stock level of SKU 2 at site A are grouped to form a new action
that increases the stock level of SKUs in assortment 1 at site A. Similarly, action
that increases the stock level of SKU 1 at site B and
that increases the stock level of SKU 2 at site B are grouped to form the new action
that increases the stock level of SKUs in assortment 2 at site B. The reduction in the number of actions depends on the number of actions assigned to an assortment. As a result, the optimisation algorithm explores a smaller number of actions.
In order to construct an action plan from the grouped actions, the number of selected grouped actions is almost certainly lower than the length of the action plan. Four actions are selected to form an action plan of length four. If two actions are grouped, they form an action plan of length four. Therefore, this reduction in the number of selected actions further reduces the number of potential action plans and the number of evaluations.
8. Evaluation and Results
In order to test the proposed approaches, we used a database from a distribution network of an international material trading company. The database was extracted from their enterprise resource planning system and was verified and validated according to a procedure model presented by Rabe et al. [
82]. In this research, we filtered this database down to a subset of five sites and 30 SKUs. This database represents the database in
Figure 1. Then, we adapted the
evolutionary algorithm to utilise the actions’ DSI. This information is assigned to the action types, and from there then it is inherited to the derived actions from the action types. The selection probability of actions is changed based on their DSI. For example, considering the actions’ type of changes, the actions are classified as structural and parametrical actions. The selection probability of these classes is changed according to Equations (
1) and (
2). An action is selected randomly from the respective selected class. Thus, the selection probability of actions is biased based on their type of changes.
We compared a completely random selection of actions with a biased selection of actions in the construction of action plans in the EA’s initial generation. The number of generations that were required to stagnate and the quality of the corresponding recommended action plans were recorded for the comparison. The quality of the action plans has been evaluated based on the costs and the service level. Fifty individuals form a generation in the EA. The crossover and mutation probabilities were set to 0.8 and 0.3, respectively. The crossover forms, CR, were the one-point crossover, the two-point crossover, and the uniform crossover. In mutation, MU, one randomly selected action was replaced, or multiple actions were selected to be replaced. Each experiment setup was run ten times.
Table 3 records the average performance and demonstrates the gap analysis of the difference between random selection and the biased selection of actions.
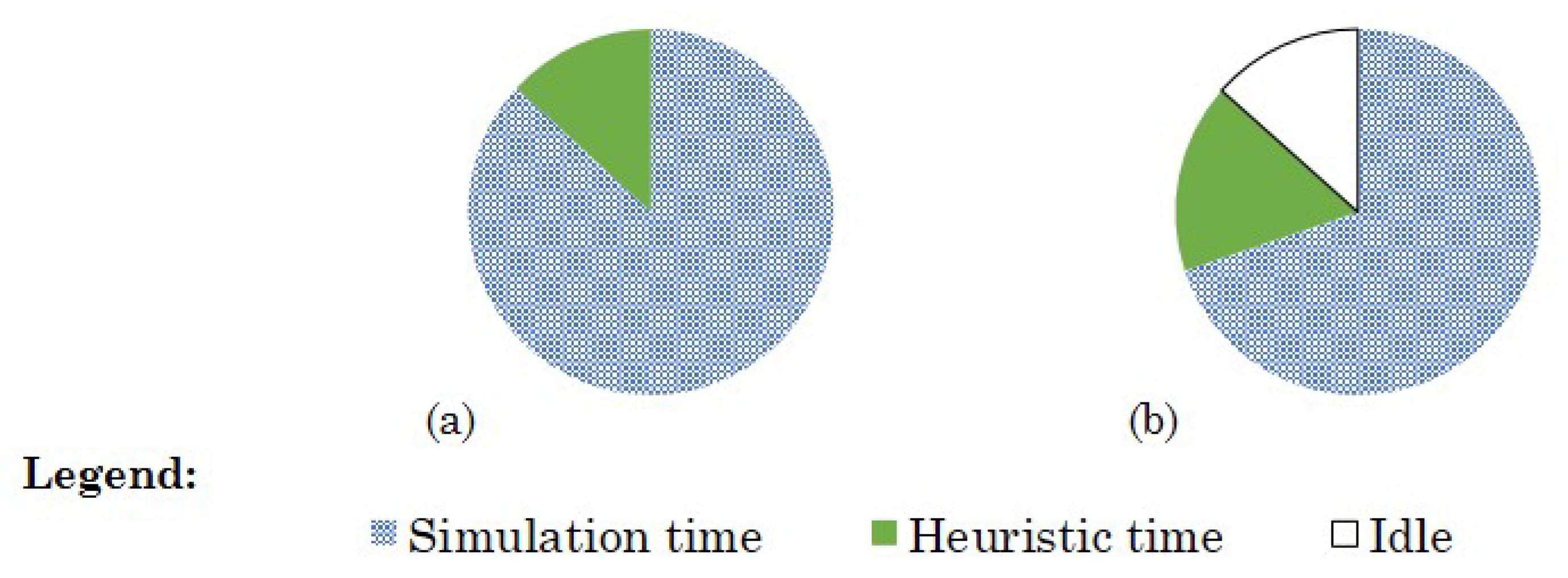
Next, we have tested the approach that exploits the definition of equivalent action plans. In this experiment, the EA selected actions randomly, and the evaluation of an action plan was skipped if an equivalent action plan was previously evaluated.
Figure 9 shows the time distribution during an experiment run when the crossover and the mutation probabilities were set to 0.8 and 0.3, respectively. The number of simulation runs decreased by more than 15%.
For the experimentation with the
DQN agent, the authors assumed that one training episode for the reinforcement learning agent consists of taking three actions. Hence, once the three actions have been taken, the simulation is reset to its initial state and the agent can start a new training episode. The hyper-parameters of the architecture have been kept mostly the same for all the experiments. However, further architectures for the internal DQN were tested. For each architecture, the reinforcement learning agent was trained with at least 1000 episodes, each consisting of taking three actions, which resulted in at least 3000 evaluative simulation runs for each architecture. In most of the cases, the agent was able to gradually learn to take the best three actions possible for the initial state of the logistics network after about half of the training episodes. By conducting these experiments, the authors could demonstrate that a general reinforcement learning agent was able to generate action plans just from its trained internal value function approximation. Hence, in general, the presented approach can be used to reduce the response time
(cp.
Section 1). However, as a drawback, the total runtime of each experiment took several days. As expected, the bottleneck in terms of computing performance was not the back-propagation through the CNN, but the simulation time needed for each evaluative simulation run. Although the experiments have been performed on relatively small test models of a logistics network, the results of the experiments with the DQN implementation were promising, since they showed that a general purpose reinforcement learning agent can in fact be trained to optimize a logistics network model solely from a state representation, a reward signal, and the available actions types.
9. Discussion
The approaches explained in
Section 4 and
Section 5 aim to improve the performance of the LAS. This performance is evaluated based on the performance of the simheuristic’s components – metaheuristics and simulation. The quality of found solutions is a major performance measure to evaluate the metaheuristics used to solve an optimisation problem [
7]. Additionally, the run time of the algorithm is used to evaluate it [
83]. In this research, we used the objective values of the found solutions and the number of simulation runs to evaluate the recommended approaches. The number of simulation runs represents the number of objective function evaluations, which is an indicator of the run time of an algorithm to recommend a solution [
27].
Researchers proposed approaches to improve the performance of the metaheuristics by focusing on the analysis of the search space. For example, Bode et al. [
41] screened solutions before their evaluation. Karimi et al. [
84] clustered the problem’s search space before exploring it, and Ku and Arthanari [
85] replaced the search space with a smaller space. Furthermore, researchers have filtered the solutions to reduce the number of objective function evaluations, such as Cai et al. [
86] and Alsheddy et al. [
13].
Other approaches have examined the search algorithms. They investigated improvements to the local search, such as Alsheddy et al. [
13], who aimed to escape from a local optimum by introducing penalties. Other researchers have investigated machine learning and data mining to learn from the patterns [
87,
88]. Amaran et al. [
89] stated that problem information could be used to construct initial promising solutions as an input to the optimisation algorithm. Forming these solutions by selecting its parts randomly based on problem information is called randomly biased selection [
42].
In
Section 6, we introduced an approach to guide the search of a metaheuristic algorithm. In this approach, DSI is used to prioritise which actions to select while constructing action plans. The experiments utilising the type of changes to construct action plans showed promising results for identifying initial solutions for the algorithm. We used the Mann-Whitney U test [
90] to compare our approach to random selection of actions. The null hypothesis in comparing the random selection and the biased selection is rejected concerning decreasing costs, increasing the service level, and reducing the number of generations to stagnate at
p-values of 0.0961, 0.0000, and 0.0000, respectively. These results suggest a significant impact of DSI on the performance of the metaheuristics of the LAS, and our claims of recommending better solutions’ quality and decreasing the number of generations to stagnate are accepted.
The domain-specific information can be used to alter the variation operators of the found action plans in the subsequent iterations in a metaheuristic algorithm. In our research, these operators are represented as modified crossover and mutation. Because initial solutions based on the type of changes helped the algorithm to recommend better solutions than the random selection of actions, we expect to get a similar effect in implementing them in crossover and mutation. Combining different DSI is a field for further investigation.
In addition, we propose an approach to reduce the number of simulation runs by defining equivalent solutions. This approach keeps a list of evaluated solutions and increases the EA’s computational time a bit; but this is compensated by a reduction in the number of simulation runs (
Figure 9). The memory usage might be overcome if the algorithm can have access to a table where this list of evaluated solutions is stored.
In conclusion, simulation runs consume a large portion of the computational time of the algorithm run in a simheuristic approach. Our approach reduced this percentage and enabled the algorithm to recommend solutions in shorter time.
10. Summary and Outlook
In this research, we have developed a logistics assistance system to support decision-making in material trading networks. Decision-makers face a challenging task in selecting actions to improve the performance of the networks. The developed LAS is based on a simheuristics framework that combines simulation and metaheuristics. For the metaheuristics, we have studied reinforcement learning and evolutionary algorithms. Additionally, we have proposed approaches to address performance challenges of the LAS that are represented as the quality of recommended actions and the number of simulation runs. Our approaches are based on utilising domain-specific information, reducing the number of actions, and defining equivalent solutions.
We have developed a suitable implementation and used a subset of real-world data to evaluate our LAS. Our results show that reinforcement learning requires a significant training time. However, after learning, it recommends promising actions upon request. The domain-specific information approach guides the search of an optimisation algorithm to select promising actions, and hence, improves the performance of the LAS. Defining equivalent action plans has reduced the number of simulation runs by up to 15%.
Our approaches are limited to distribution networks. We defined and tested them on a distribution network of an international trading company. In other networks or applications, the specific definition of the domain-specific information as well as of the equivalency of action plans should be studied.
For further research, we investigate other domain-specific information to guide the selection of actions in the LAS. Taking advantage of combining reinforcement learning and the evolutionary algorithm is another approach to be investigated. This combination requires the study of the schema to integrate both approaches. Furthermore, new parameters might become necessary to be defined and initialised.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}