1. Introduction
Zero-crossing point (ZCP) detection is very useful for frequency estimation of a sinusoidal signal under various disturbances, such as noise and harmonics. Zero-crossing point detection is an important mechanism that is useful in various power system and power electronics applications, such as synchronization of a power grid [
1], the switching pulse generation in triggering circuits for power electronics devices, control of switch gear, equipment for load shedding or protection and signal processing, and it is also used in other fields such as radar and nuclear magnetics [
2]. This technique’s appeal stems largely from its ease of implementation and resilience in the presence of frequency fluctuation.
The ZCP estimation tools have certain flaws such as the technique’s accuracy in the presence of transients, harmonics and signal noise, which is still dubious. The most important requirement for properly determining the ZCP of any signal using digital control methods is that the signal should be free of any false ZCPs. Harmonics due to nonlinear loads will have an impact on zero-crossing points of voltage signals and also lead to power quality issues such as malfunction of protection devices, lower power factor, increasing losses and decreasing power system efficiency [
3]. The existence of transients, harmonics or noise in the system enhances the probability of a false ZCP occurrence. This issue has not been effectively addressed since there has been relatively little study on the subject.
Artificial intelligence (AI) is now used in a variety of sectors, especially in electrical for load forecasting [
4] and image processing [
5]. In this paper, an AI approach is used to predict the ZCP class in a distorted sinusoidal signal. AI analyzes the system and predicts outcomes based on previously known data.
ZCP detection technique is developed to estimate the distorted sinusoidal signal in a power grid using least square optimization in [
6]. However, this method is not suitable where fast zero-crossing detection is required. A neural network-based approach is developed in [
7] to detect the ZCP for a sinusoidal signal with only frequency variation from 49Hz to 51Hz but not considered the distortion in the signal with noise. Opto-coupler based ZCP detection is developed in [
8]. This approach results in phase distortion due to the diode’s non-zero forward voltage.
A novel ZCP tool is developed in [
9] using a differentiation circuit and reset flip-flop that leads to less delay time for ZCP detection. This tool performance is examined up to 7.27% total harmonic distortion (THD) only. Support vector machine based ZCP detection tools are developed in [
10] by considering the 100 microseconds sample-distorted sinusoidal signal.
A new zero-crossing detection algorithm based on narrow-band filtering is developed in [
11]. In this algorithm, normalized electrical quantity is passed through a narrow band filter. A ZCP detection algorithm is developed in [
12] based on linear behavior of the sinusoidal signal at the zero-crossing point. In this methodology, the author has used multistage filtering and line fitting techniques.
A zero-crossing detection based digital signal processing method is proposed in [
13] for an ultrasonic gas flow meter, and this methodology is used for ultrasonic wave propagation time calculation. If the freewheeling angle exceeds 30, the zero crossing of back EMF will be undetectable. Detection of ZCP in the back EMF signal for brushless DC motors under sensorless safety operation, i.e., the maximum free-wheeling angle, is proposed in [
14]. Multiple ZCP detections in ultrasonic flow meters to determine time of flight are proposed in [
15]. In this paper, time taken to obtain ZCP is used as time of flight. Hardware support for measuring the periodic components of signals based on the number of ZCP is proposed in [
15]. ZCP detection circuits are complex and require more accurate detection; due to this complexity few works are carried out by avoiding ZCP, such as soft-switching control without zero-crossing detection for the cascaded buck-boost converters [
16]. Detection of ZCP using Proteus ISIS software with a microcontroller is proposed in [
17] for power factor correction and a trigger angle on the SCR trigger for DC motor speed control is for the rocket launch angle adjuster. A simple detection method for the ZCP of converter current using a saturable transformer for use in high-current and high-frequency pulse-width modulated power electronic converter applications is proposed in [
18].
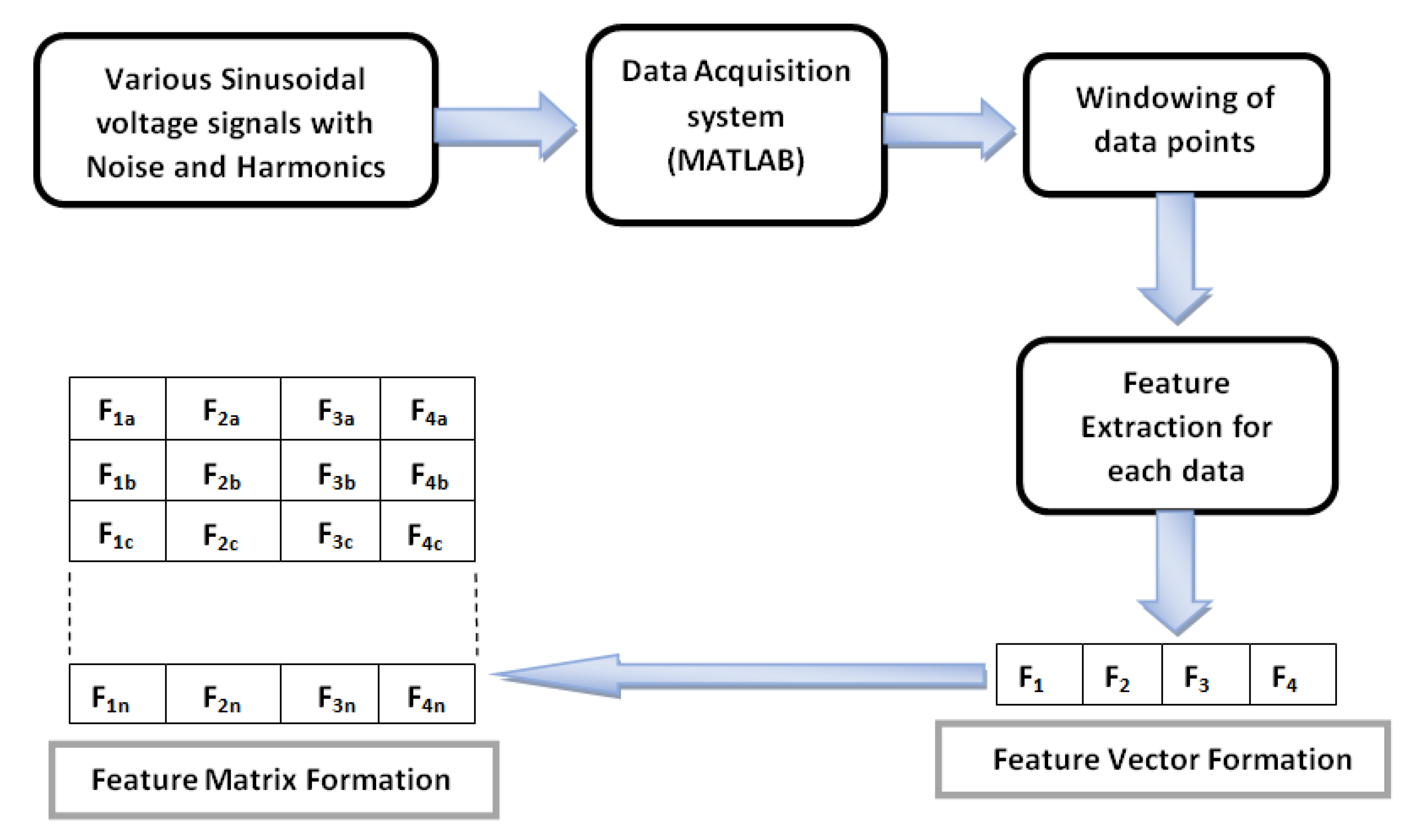
All the methodologies mentioned above provide valuable contributions to the ZCP problem. However, to improve the accuracy in predicting the true ZCPs, a new deep neural network (DNN) based machine learning model is developed in this paper. In order to make this DNN model more generalized, a variety of distorted signals are generated and extensive features such as slope, y-intercept, correlation and root mean square are extracted and used as dataset samples.
The main motivation for this work is to identify the most accurate zero-crossing points of distorted voltage signals for proper protection of a power system using switch-gear equipment and efficient power conversion by generating proper triggering pulses in conversion circuits.
The main contributions of this paper are as follows:
A properly tuned DNN model is developed for accurate ZCP detection.
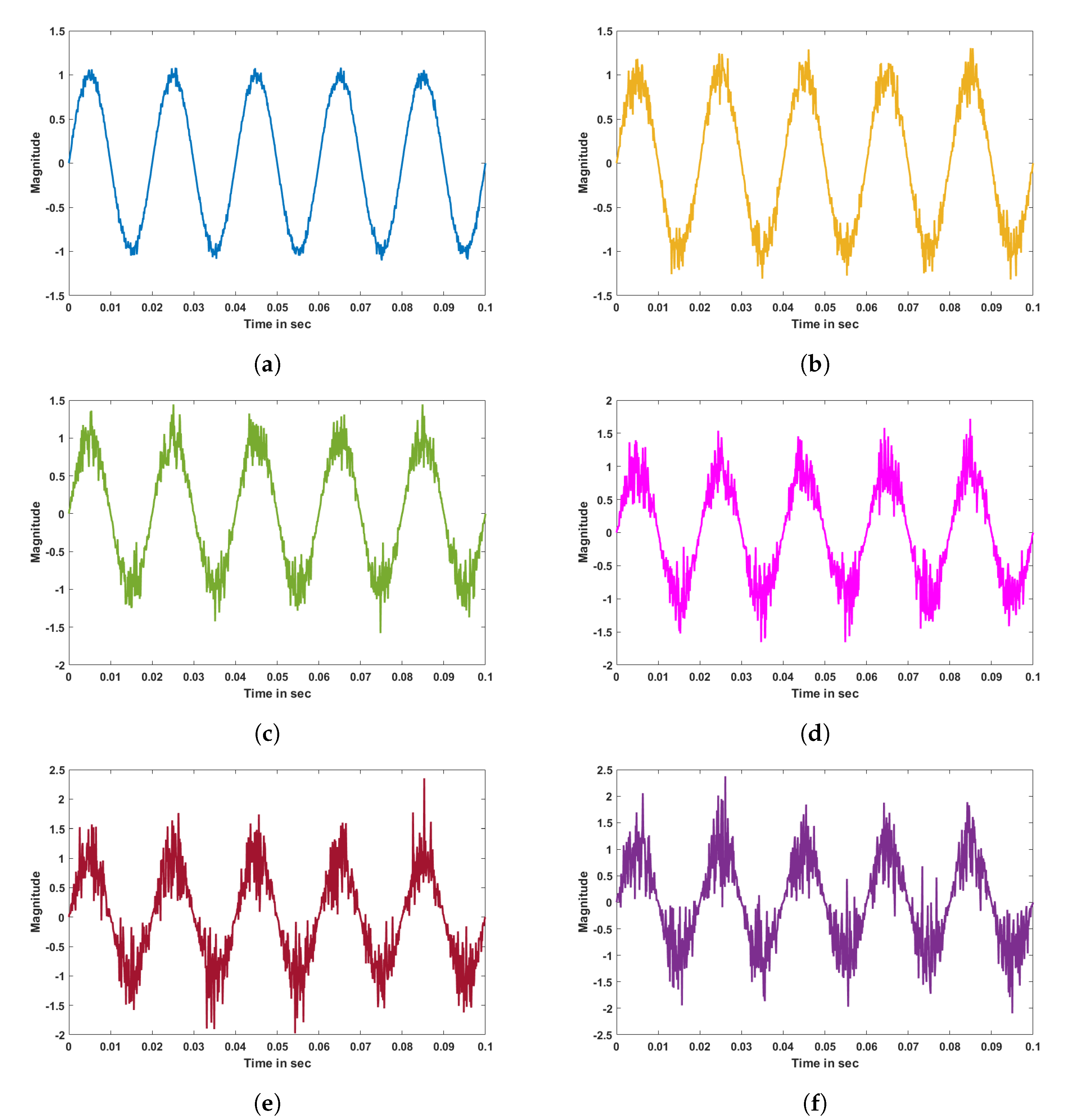
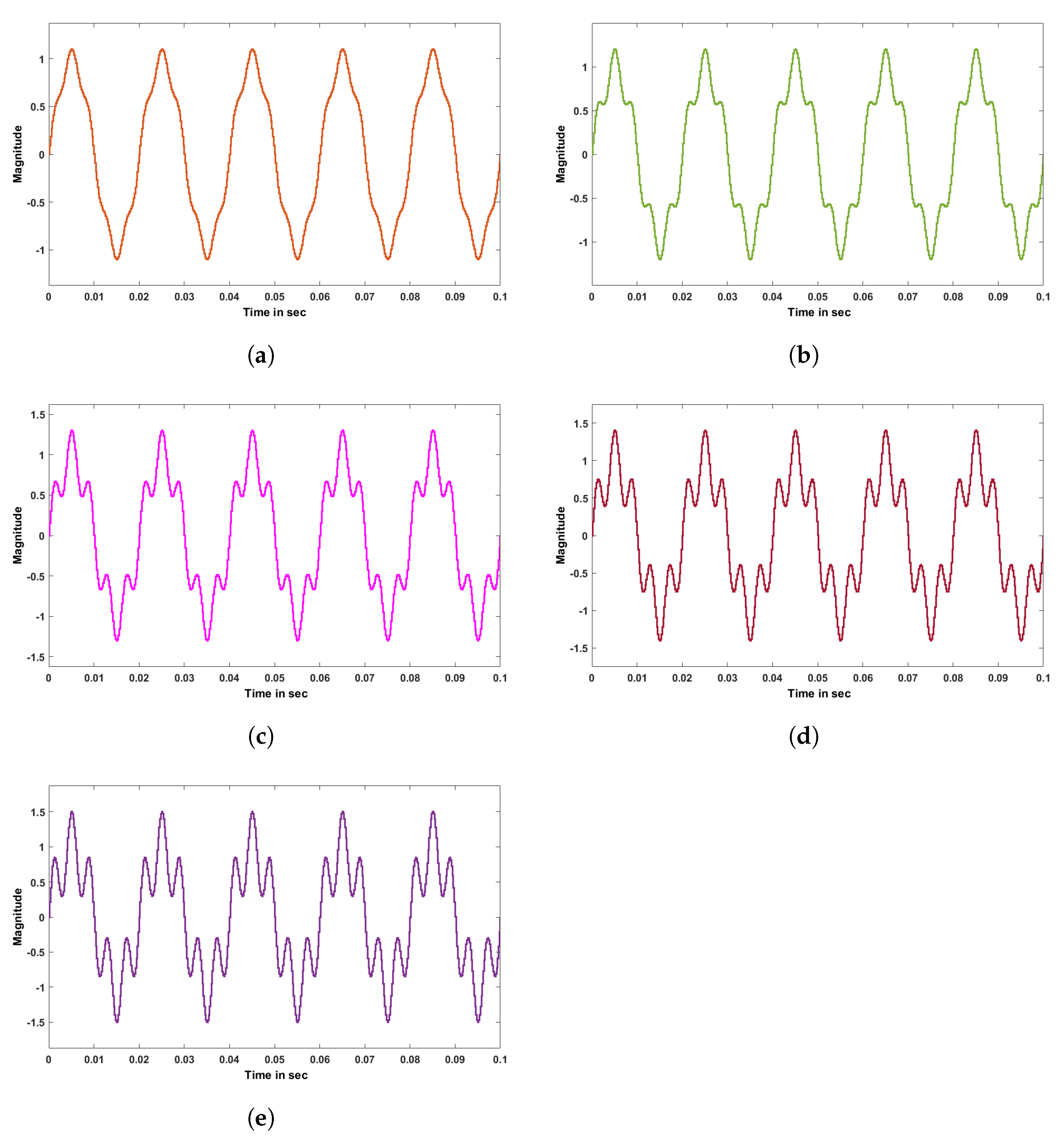
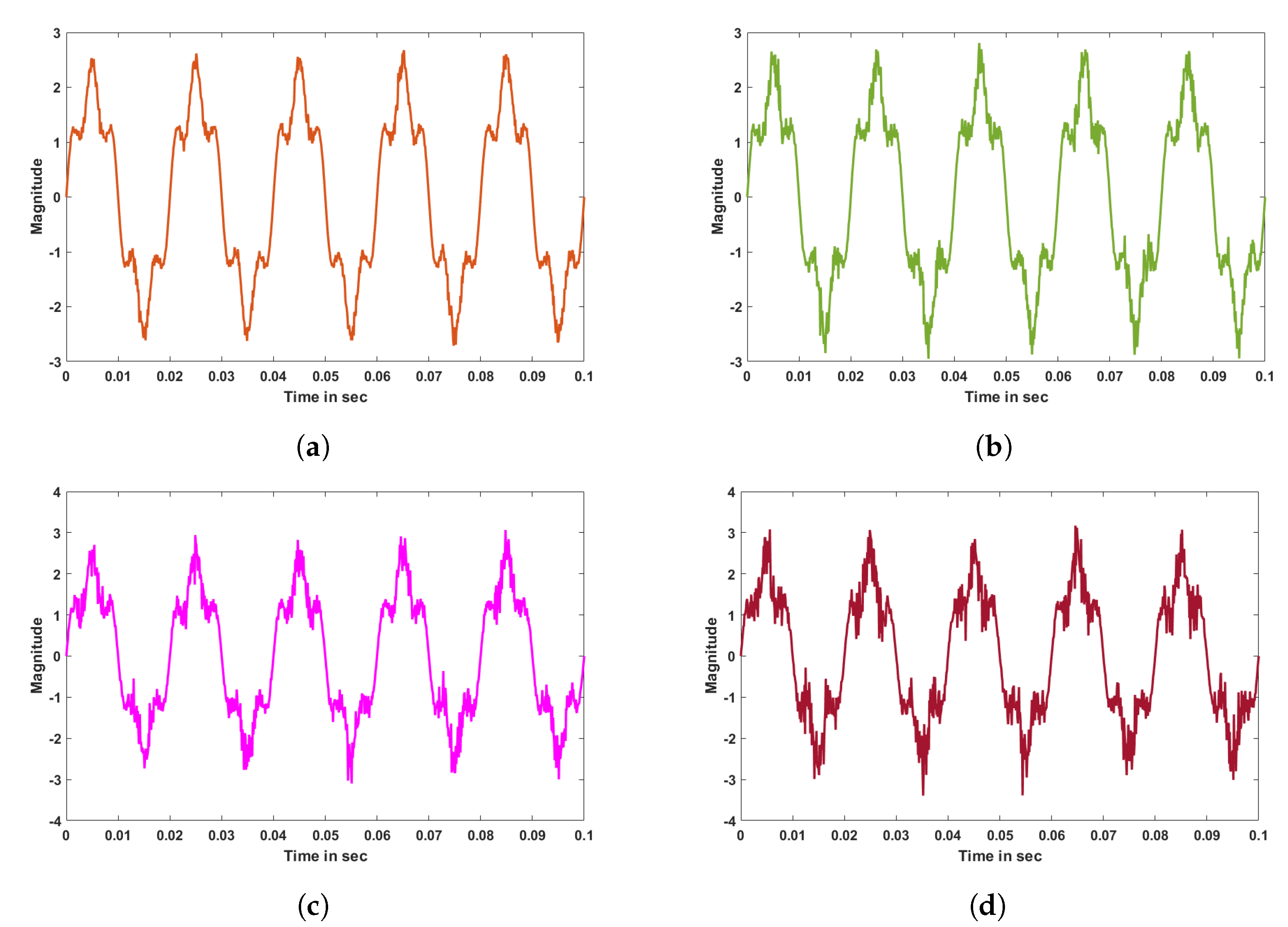
Four new datasets are created with a variety of distorted sinusoidal signals by considering noise levels from 5% to 15% and THD levels from 10% to 50%.
The remaining part of this paper is structured as follows:
Section 2 presents a methodology that includes DNN model configuration and dataset preparation,
Section 3 demonstrates results analysis and
Section 4 describes conclusions.
3. Results
The dataset that is created, as per the discussion in
Section 3, is for the training and testing of DNN models. Statistical features of all ZCP datasets, which are Dataset-1: noise levels 10% to 50%, Dataset-2: THD levels 10% to 50%, Dataset-3: noise levels 10% to 40% with THD level 50% and Dataset-4: Noise levels 5% to 20%, have been used to train the DNN model presented in
Table 2,
Table 3,
Table 4 and
Table 5 respectively. The back-propagation through time (BPTT) algorithm with the Adam optimizer is used to train the proposed DNN model. The proposed DNN model is being implemented and tested in Google Colab.
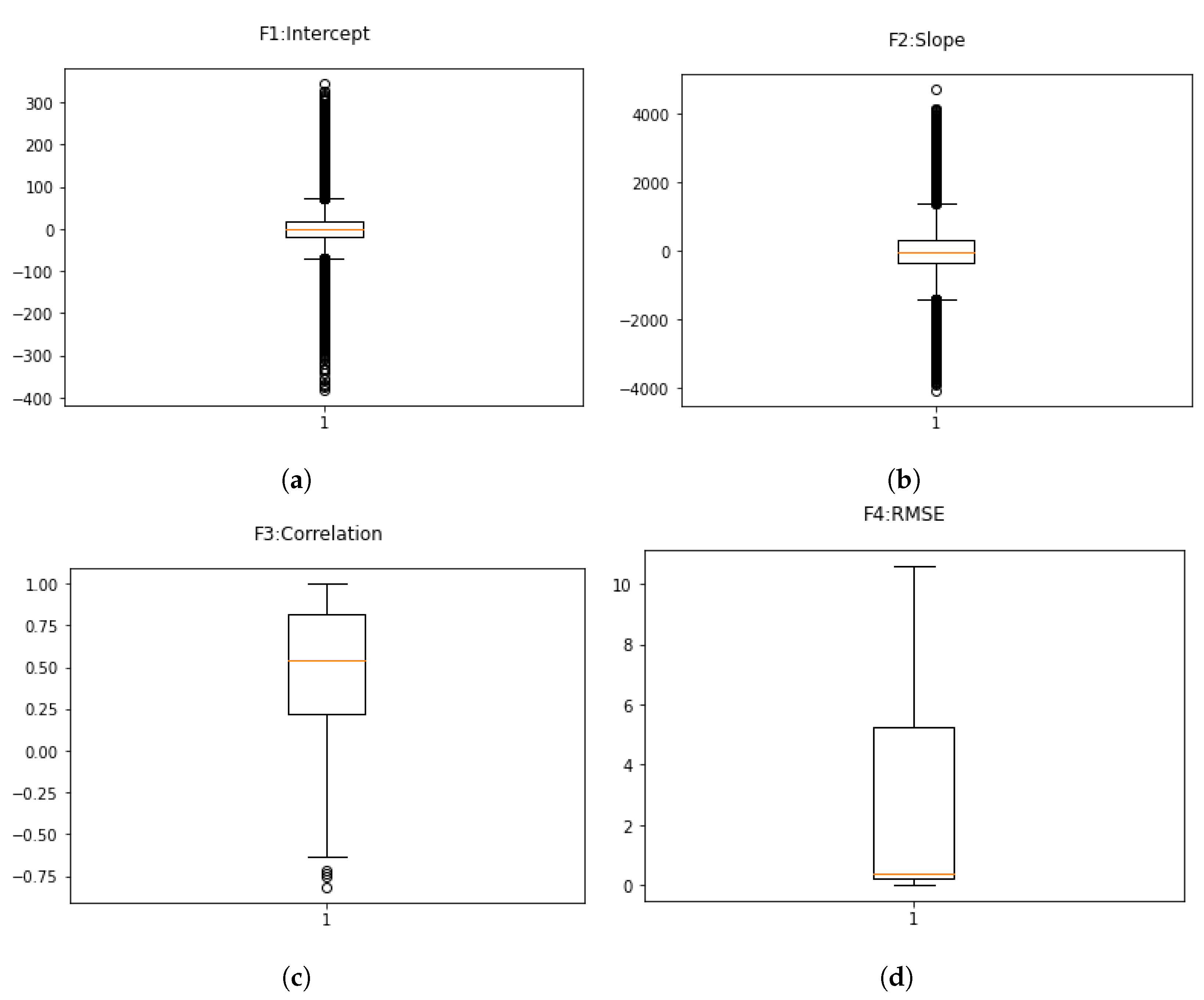
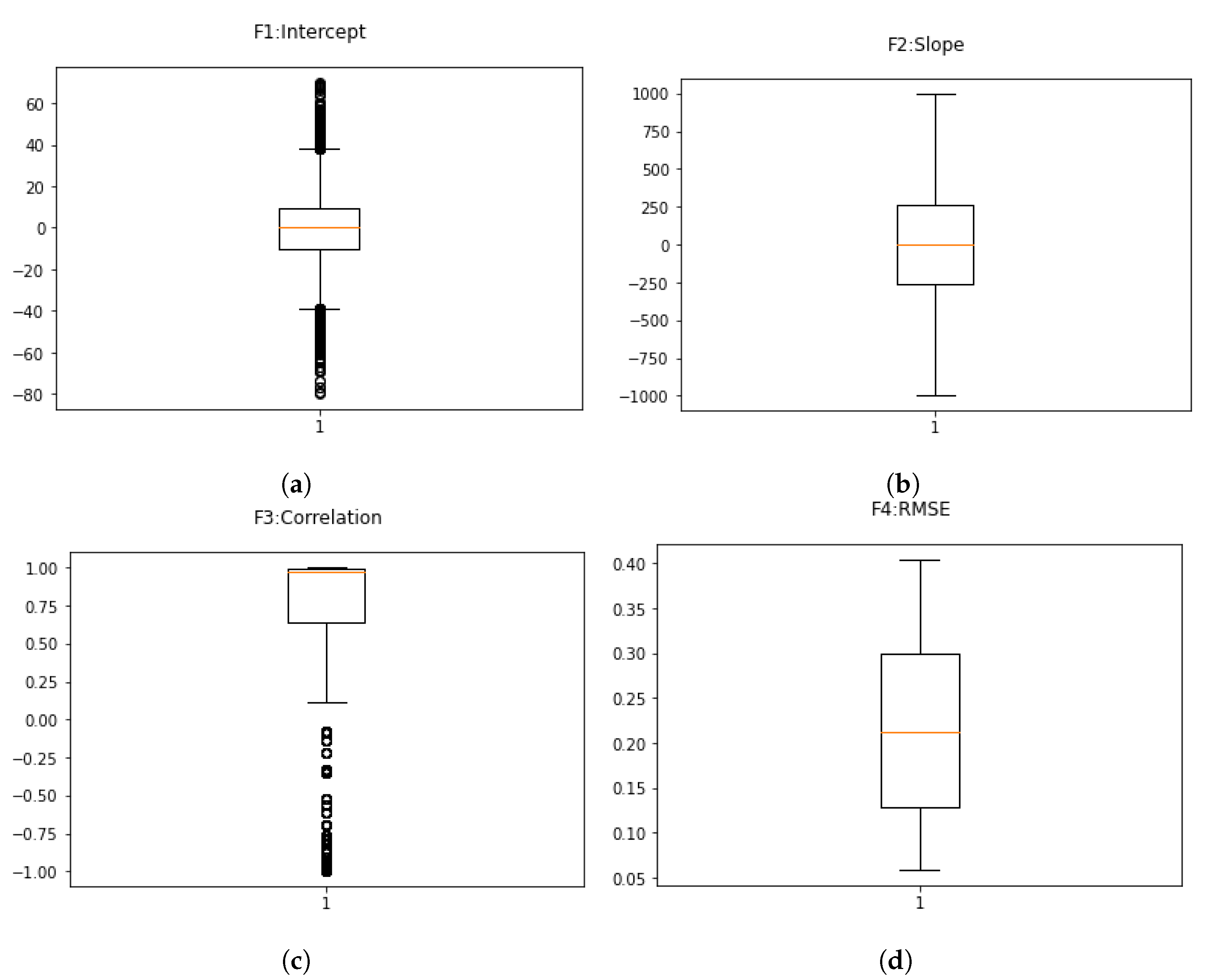
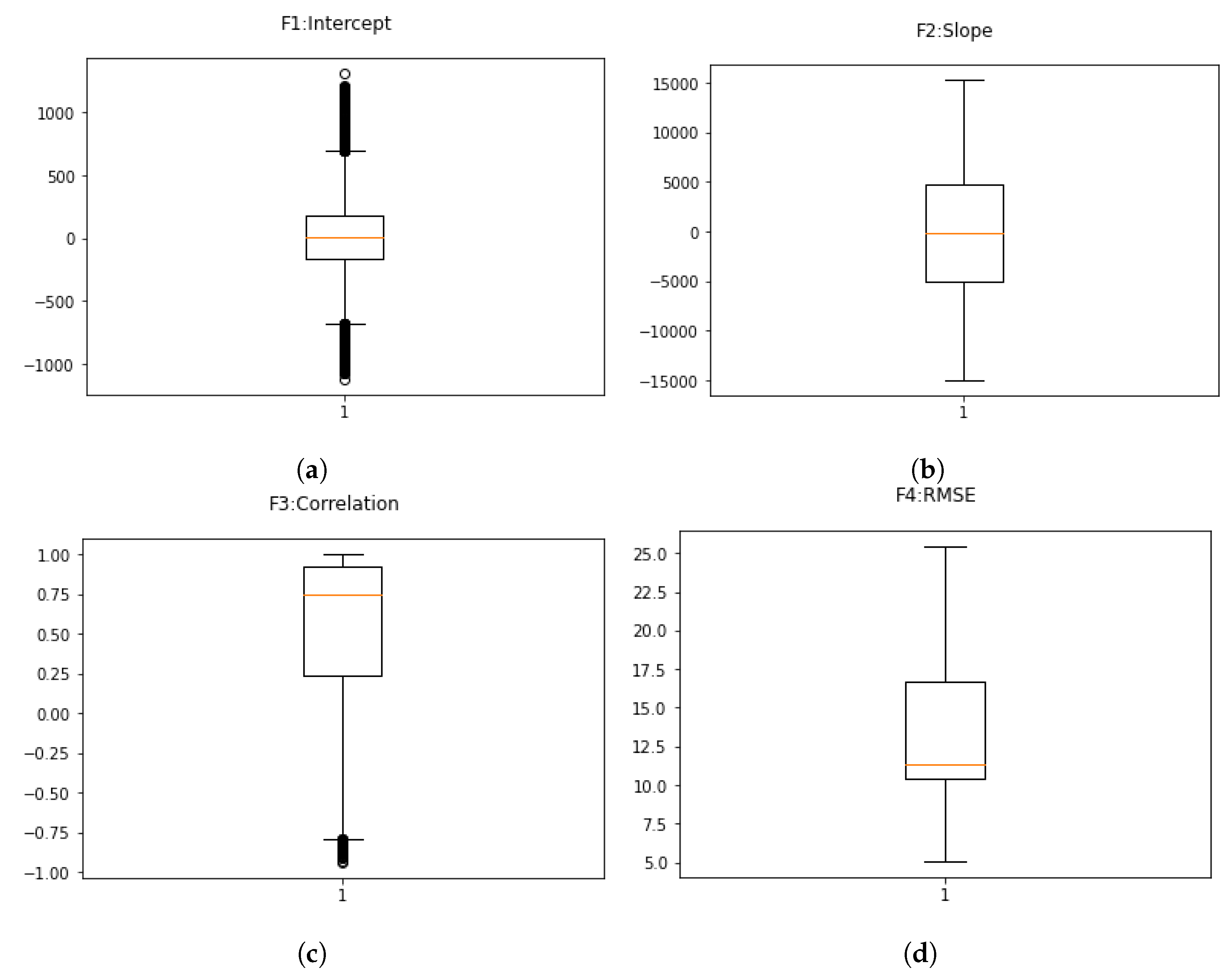
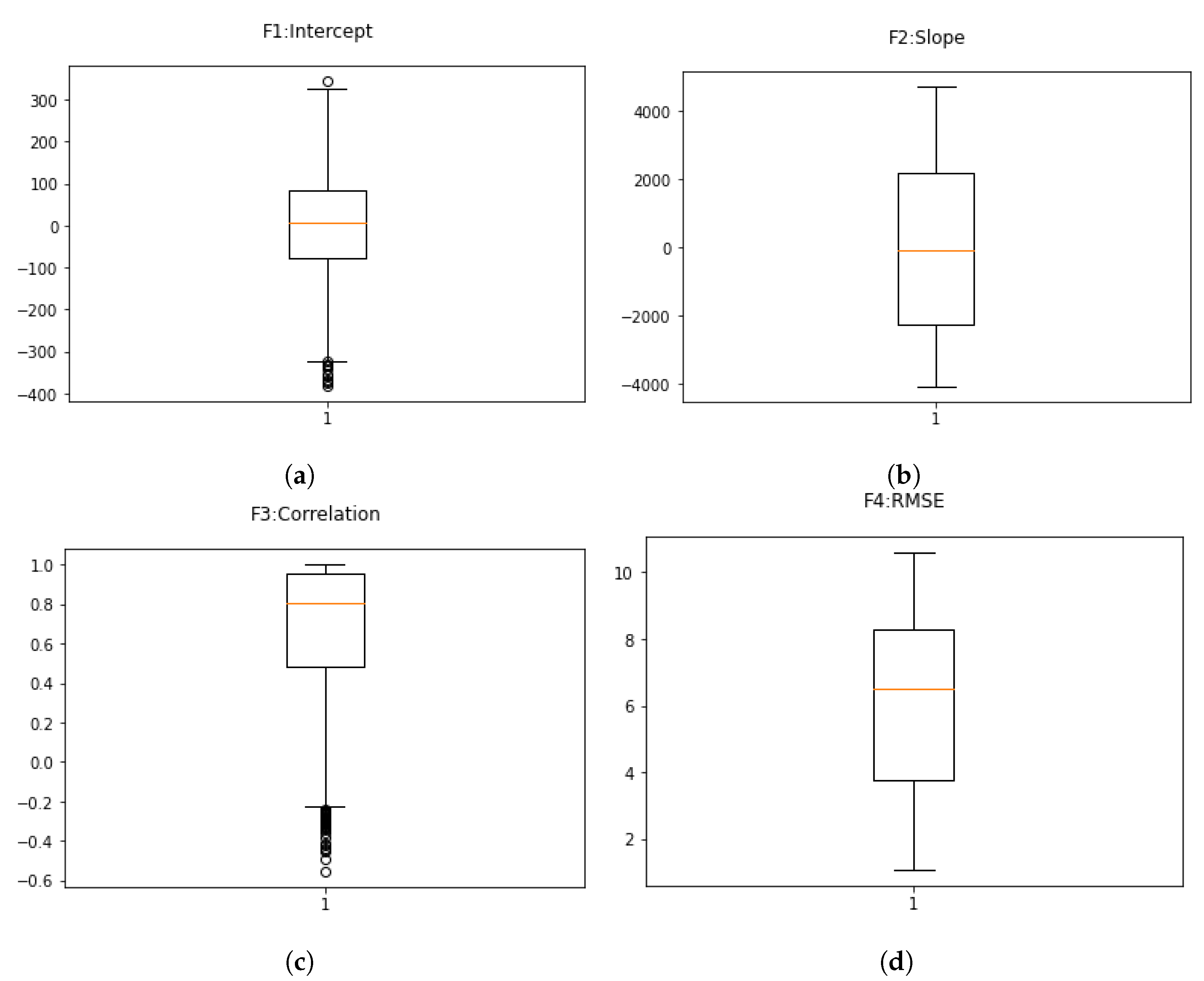
Box plots are used to identify the outliers against each input feature in every dataset mentioned above. Box plots against each feature for Dataset-1, Dataset-2, Dataset-3 and Dataset-4 are shown in
Figure 7,
Figure 8,
Figure 9 and
Figure 10, respectively. From all these plots, it has been observed that features in all datasets, such as intercept, correlation and slope, have outliers as data exist below the 25% interquartile range and above the 75% interquartile range. These outliers are due to spikes in distorted signals due to noise and harmonics and cannot be removed from data to make the model predict zero-crossing points under noise and harmonics.
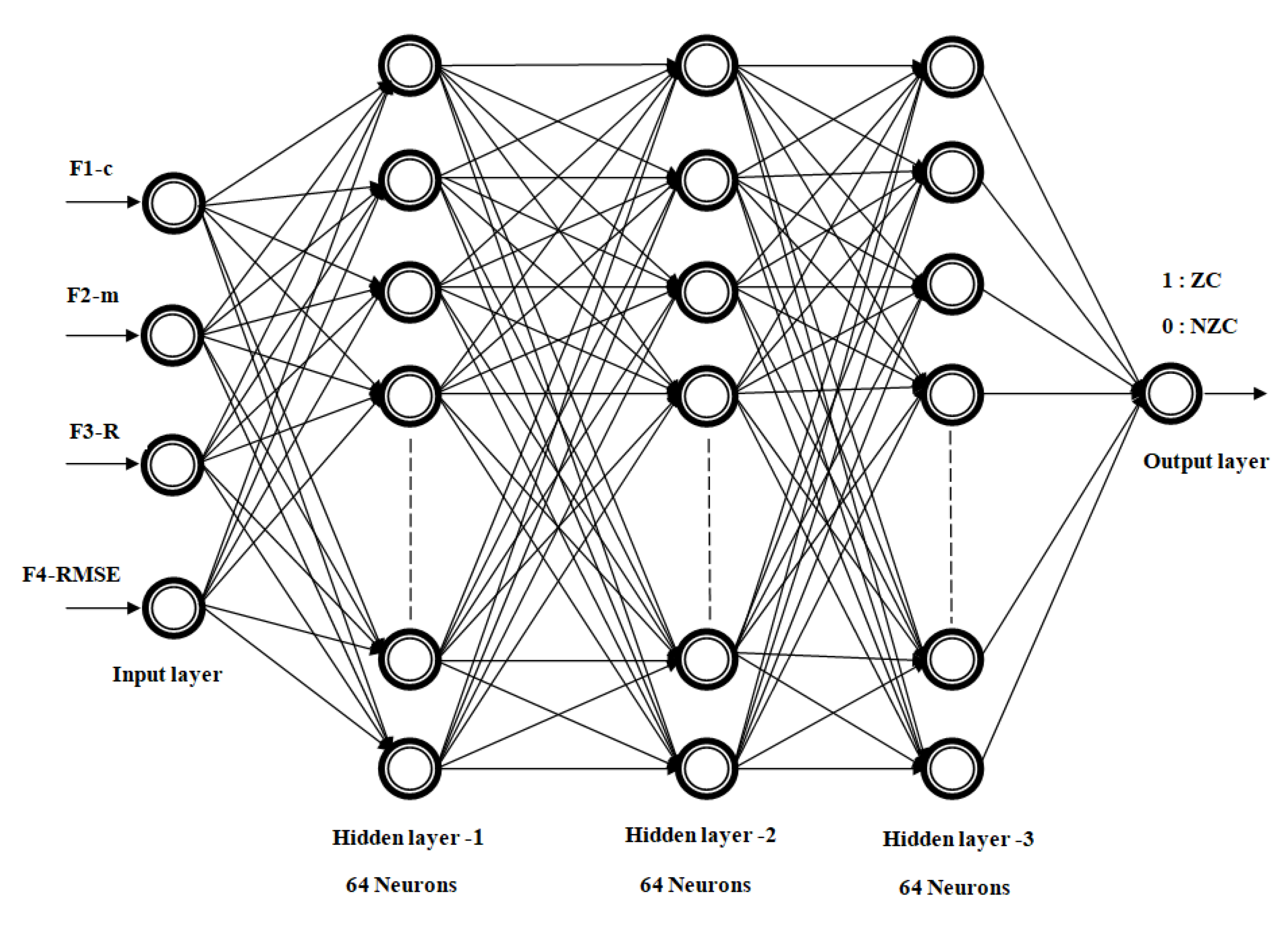
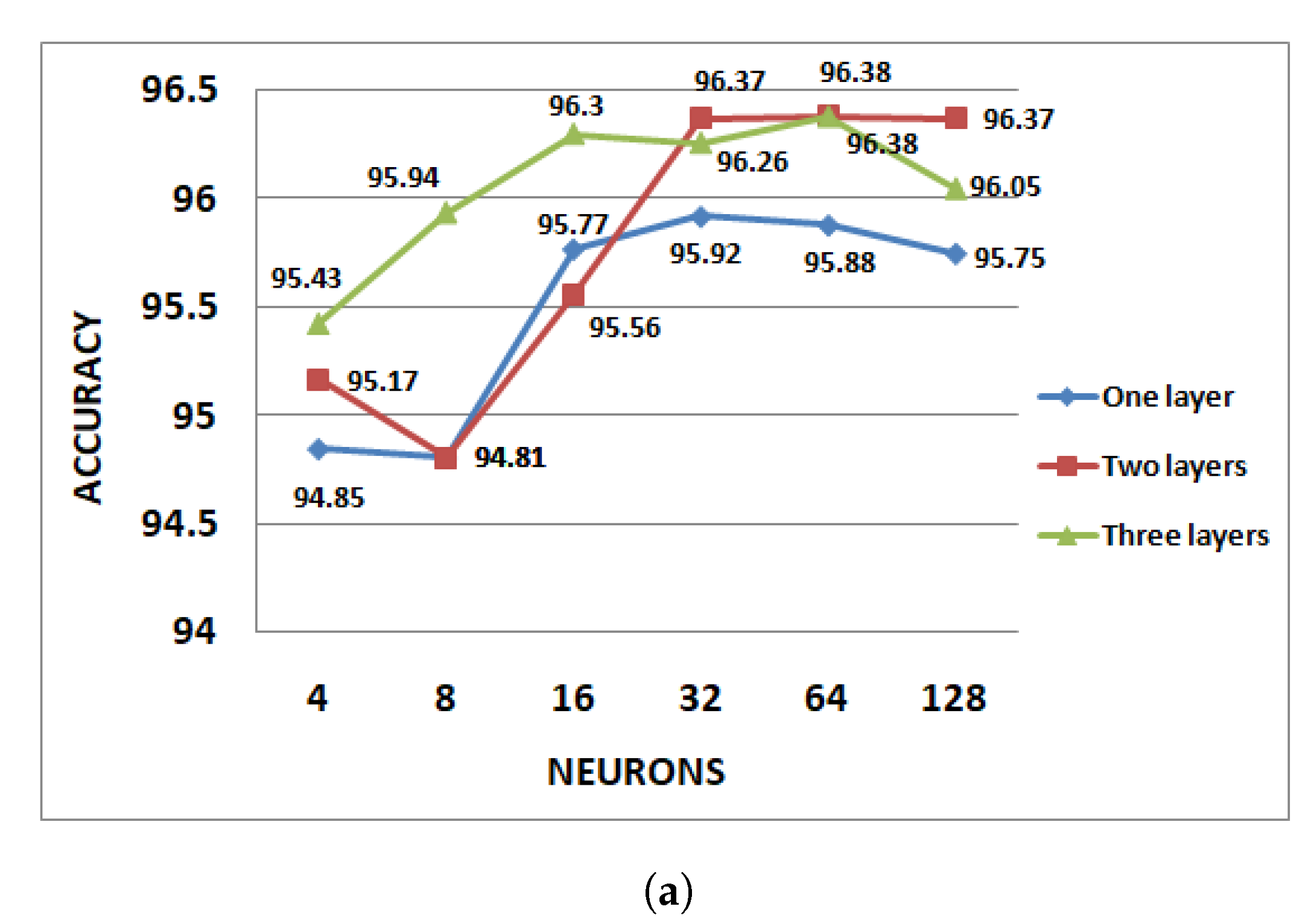
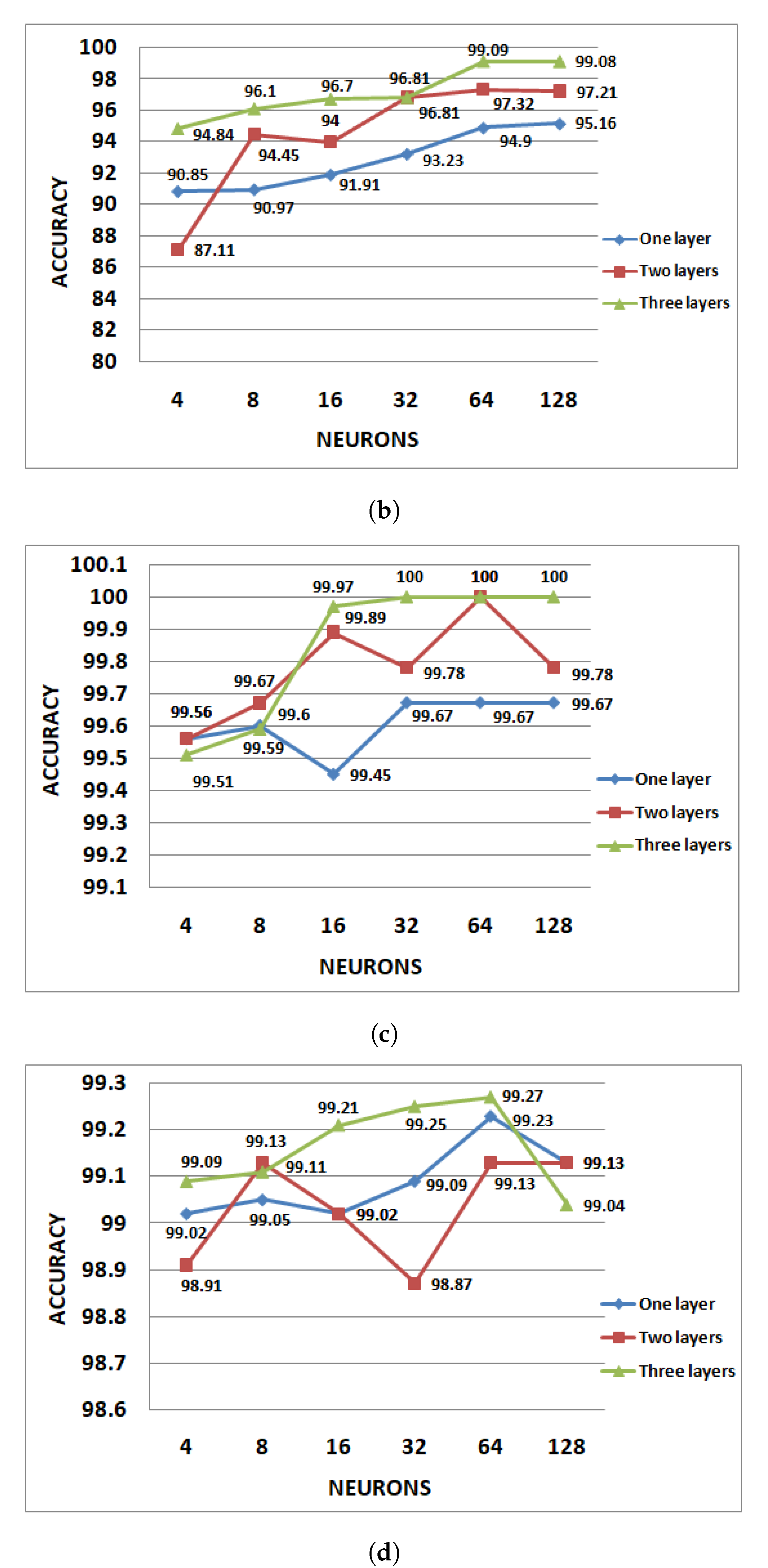
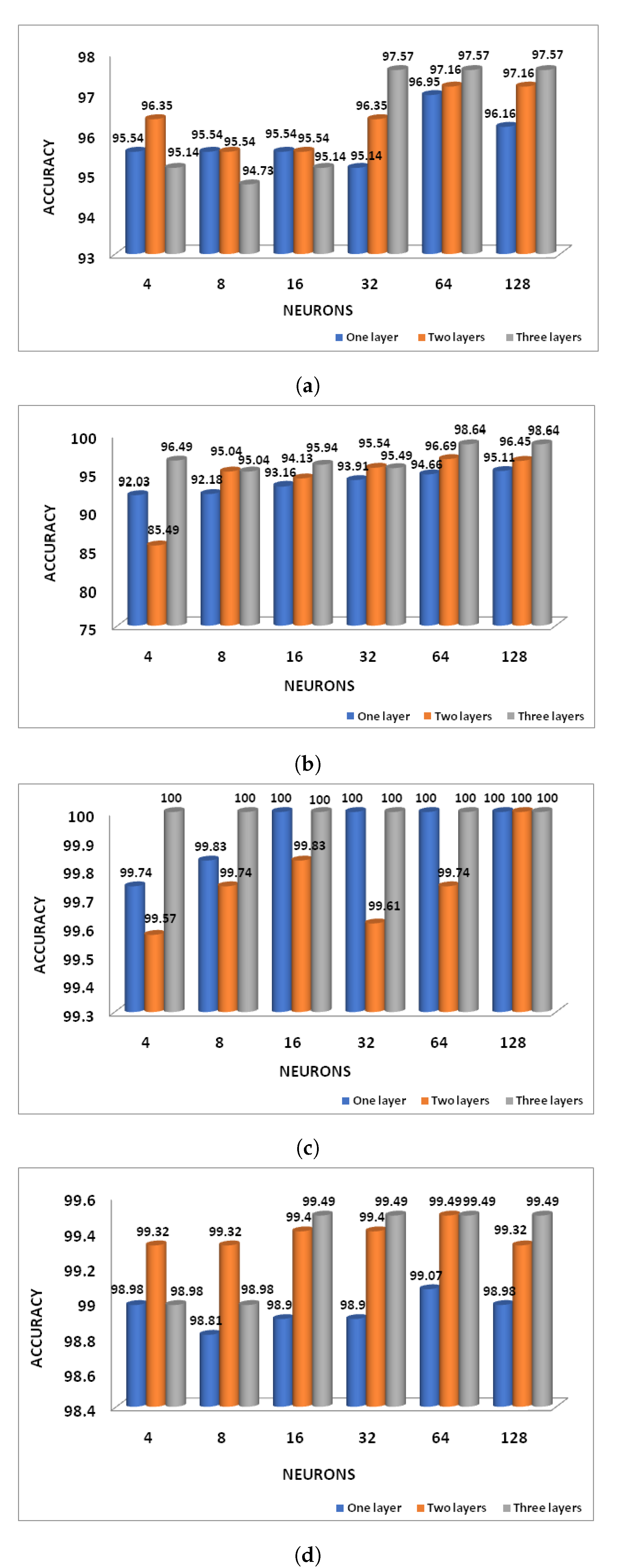
All four datasets that contain four input features and one output label are used to train the DNN model. The training accuracy of the DNN model against each variety of datasets for various hidden neurons and hidden layers combinations are shown in
Figure 11. From the figure, it has been observed that the DNN model’s training performance is good with maximum accuracy with 3 hidden layers and 64 hidden neurons. Similarly, the testing accuracy of the DNN model against each variety of datasets for various hidden neurons and hidden layers combinations is shown in
Figure 12. From the figure, it has been observed that the DNN model’s testing performance is good with maximum accuracy using 3 hidden layers and 64 hidden neurons.
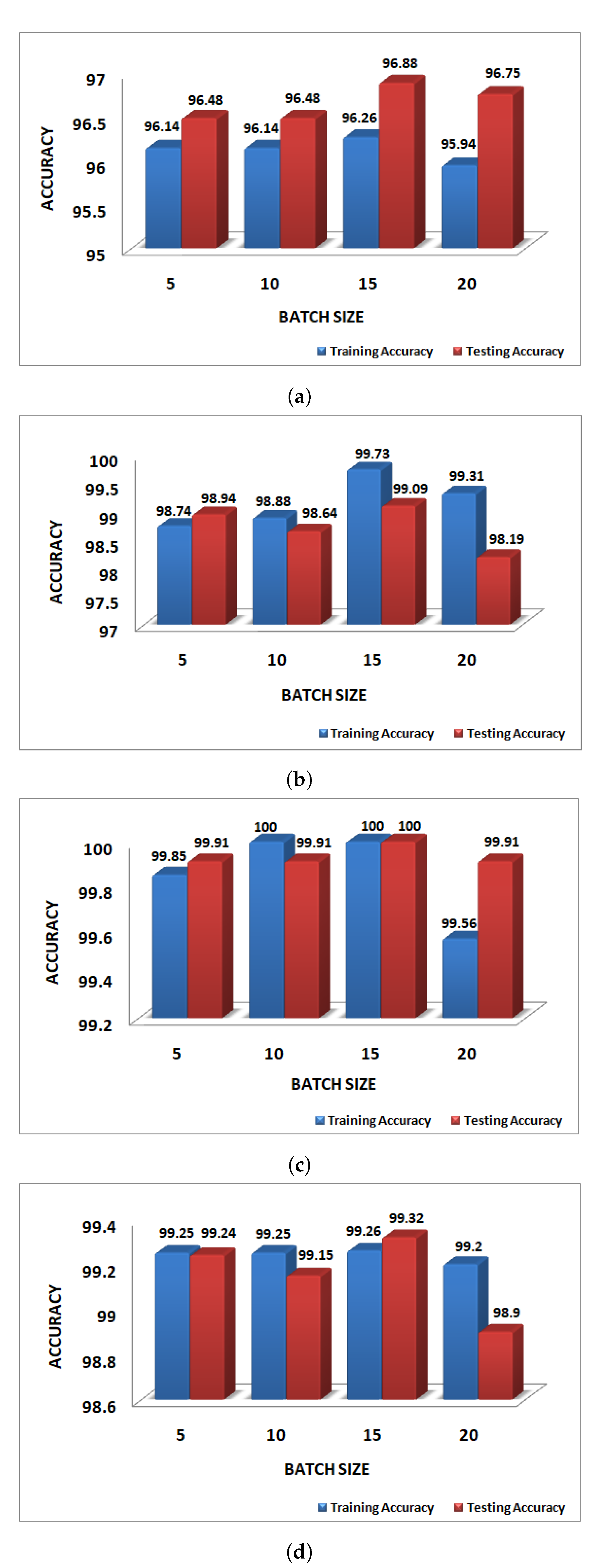
The proposed DNN model with 3 hidden layers and 64 hidden neurons is trained with various batch sizes on all the datasets mentioned in this paper, and accuracy levels for each batch size are presented in
Figure 13. From
Figure 13, it has been observed that the DNN model trained with a batch size of 15 provides good training accuracy of 96.26%, 99.73%, 100% and 99.26% and testing accuracy of 96.88%, 99.73%, 100% and 99.32% on Dataset-1, Dataset-2, Dataset-3 and Dataset-4, respectively.
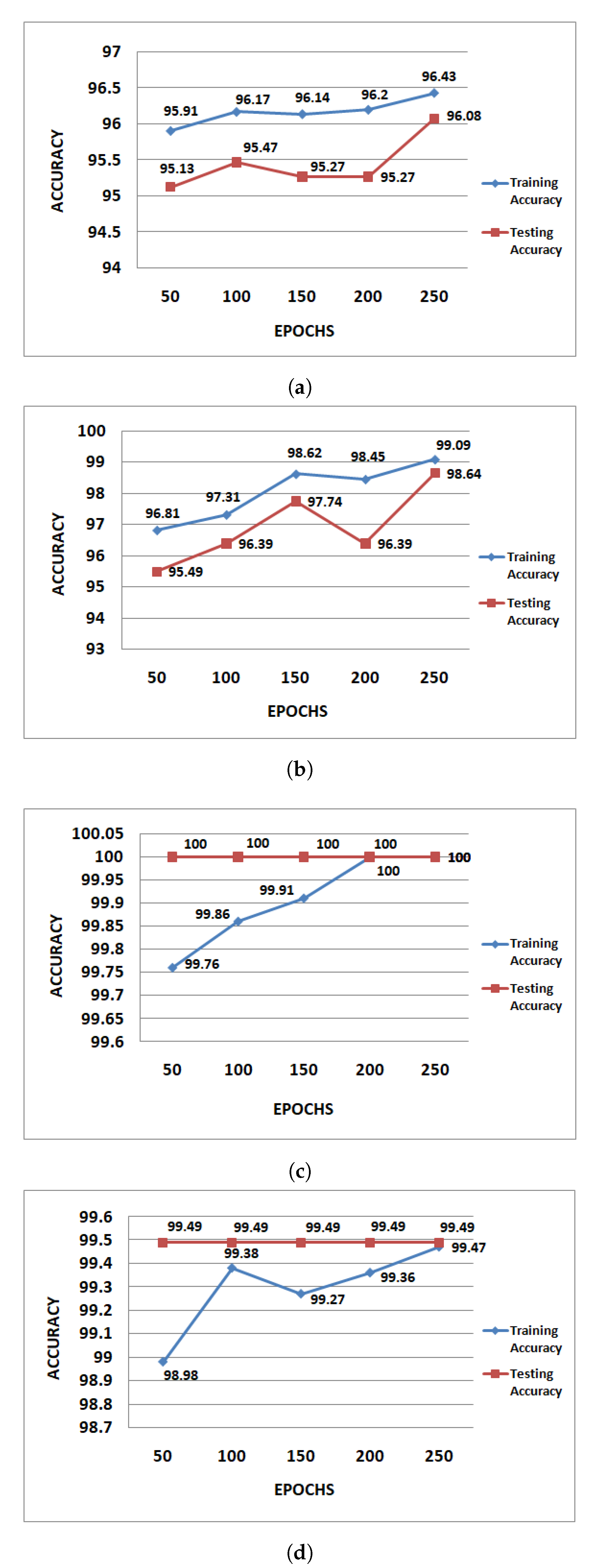
The proposed DNN model with 3 hidden layers and 64 hidden neurons is trained with various epoch sizes on all the datasets mentioned in this paper, and accuracy levels for each epoch size are presented in
Figure 14. From
Figure 14, it has been observed that the DNN model trained with an epoch size of 250 provides good training accuracy of 96.43%, 99.09%, 100% and 99.47% and testing accuracy of 96.08%, 98.64%, 100% and 99.49% on Dataset-1, Dataset-2, Dataset-3 and Dataset-4, respectively.
The proposed DNN model with 3 hidden layers, 64 hidden neurons and 250 epochs for all the datasets mentioned in this paper is trained with various window sizes as presented in
Table 6. From
Table 6, it can be observed that the proposed DNN model performs better for all the datasets with window size 15.
The proposed model with 3 hidden layers, 64 hidden neurons and 250 epochs for all the datasets mentioned in this paper with a window size of 15 data points is trained and tested 10 times. The accuracies for all the simulations are presented in
Table 7. The best accuracy among all the 10 simulations was chosen as the final accuracy for respective datasets.
5. Conclusions
Zero-crossing point detection is an essential task in various power system applications, such as grid synchronization, and power electronics applications, such as firing pulse generation for switching devices. The proposed good accuracy DNN model to predict the zero-crossing point can be used in the mentioned applications.
In this paper, four datasets with different noise levels and THD values are developed and used to train the DNN model for the accurate prediction of ZCP. A final DNN model with good accuracy was developed after tuning the hyper-parameters such as hidden layers, hidden neurons, batch size, window size and epochs.
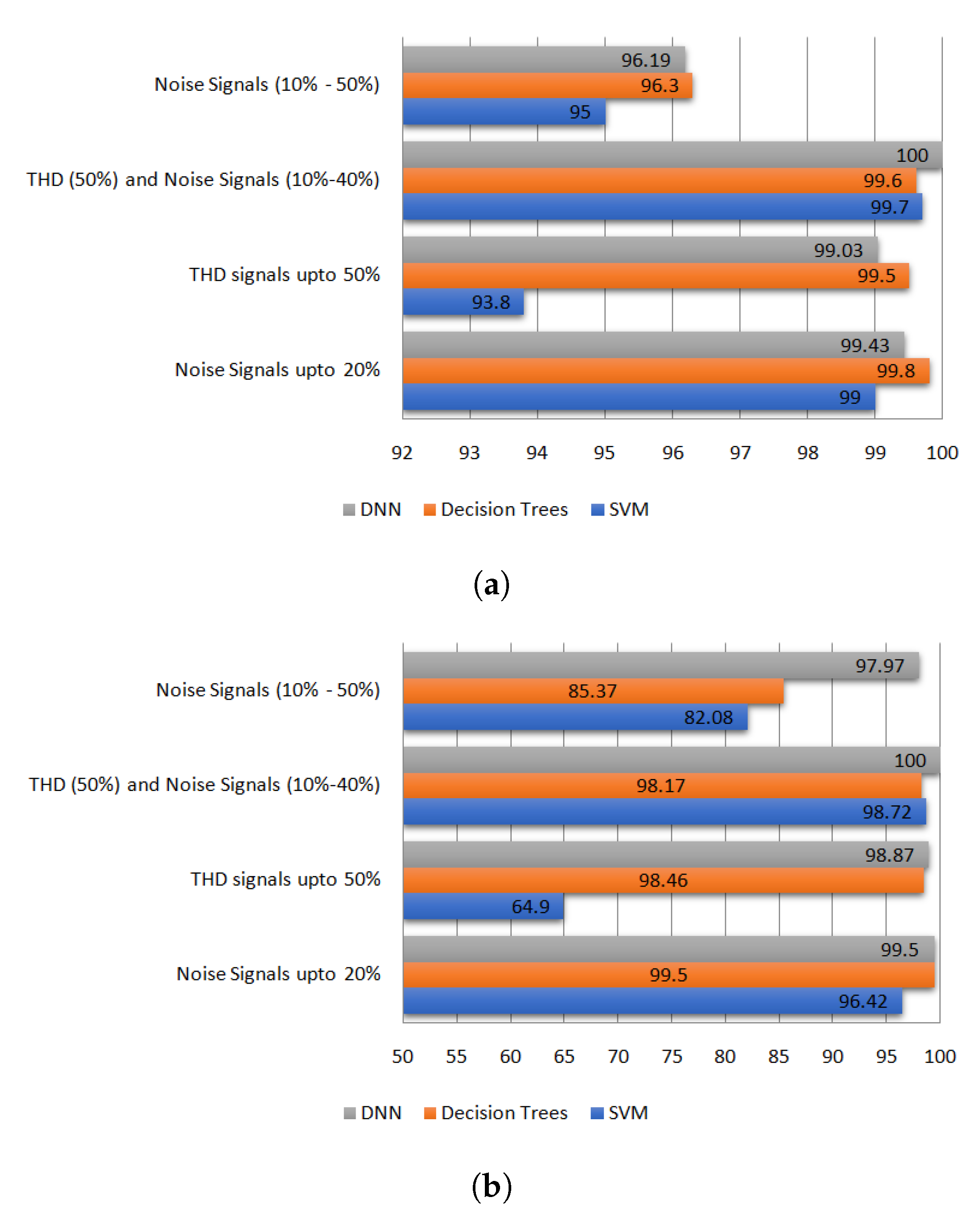
In this paper, a new DNN model with 3 hidden layers and 64 hidden neurons in each hidden layer is developed and ZCP classes were predicted with good accuracy in comparison with decision tree and SVM. The DNN model with a highly distorted signal, i.e., the signal that is distorted due to both noise and harmonics, has high accuracy in both training and testing as the model is well generalized with the high variance data. The proposed DNN model can predict the ZCP well on highly distorted signals. This work can be further extended by considering the distorted sinusoidal voltage with voltage sag and swells.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}