
A PID Parameter Tuning Method Based on the Improved QUATRE Algorithm


Abstract
:1. Introduction
- An improved QUATRE algorithm was proposed based on the original QUATRE algorithm. We combined the linear population size reduction, continuously reduced the population size according to the linear function, and adjusted the control parameters online to achieve better algorithm performance.
- The improved QUATRE algorithm was used to optimize the PID parameters, and the performance index function integral of time-weighted absolute error (ITAE) was used as the fitness function to find the optimal value through the improved optimization algorithm. At this time, the best individual was the global optimal parameter combination to achieve the optimal control of the control system.
2. Related Work
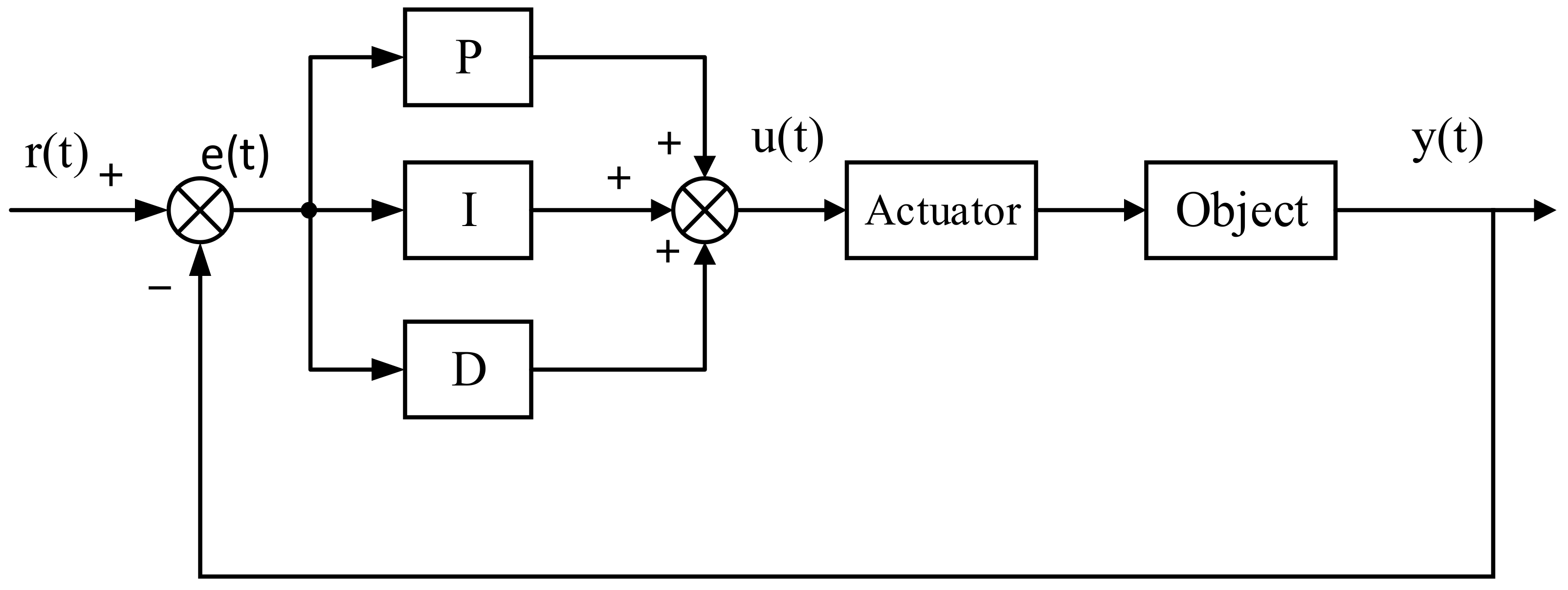
2.1. PID Parameter Tuning Method
2.2. QUATRE Algorithm
2.3. Particle Swarm Optimization
- Determine the specific function equation to be optimized f(x);
- Define initial value: velocity v and position x of N particles;
- Start to search the global optimum and the fitness value of each individual was calculated;
- The fitness value of each particle’s current position is compared with the global best and its own historical best to update the particle’s historical best and global best;
- The updating formula of velocity and position is used to change the v and x;
- Repeat steps 2–5 until the stop rule is met.
3. The Proposed Algorithm
3.1. Mutation Method of B
3.2. Adaptive Scale Factor F and M-Matrix Evolution Scheme
3.3. Population Size Reduction Scheme
| Algorithm 1 Pseudo Code of the L-EQUATRE Algorithm. |
| Input: Bound constraints [RD,min,RD,max], the fixed maximum number of function evolution nfemax; Output: Best individual Xgbest, Best fitness value f(Xgbest), number of function evaluation nfe; 1. Initialize the population size ps, scale factor F, inheritance probability P, all individuals X = {X1, X2, …, Xps}, A = ∅, rarc = 1.6, pmax = 0.2, pmin = 0.05, G = 1; 2. while nfe ≤ nfemax do 3. for i = 1; i ≤ ps; i ++ do 4. Generate , and ; 5. if G > 2 then 6. Adjust the population size; 7. Adjust the size of storage A; 8. end if 9. Generate Fi for ith individual; 10. Readjust Fi into the bound constraints if necessary; 11. end for 12. Generate evolution matrix M according to the adopt scheme; 13. Generate B according to Equation (6); 14. Generate trial candidates by employing evolution matrix M; 15. Calculate fitness values of all Ui,G; 16. nfe = nfe + ps; 17. for i = 1; i ≤ ps; i ++ do 18. if f(Ui,G) ≤ f(Xi,G) then 19. Xi,G + 1 = Ui,G; 20. else 21. Xi,G + 1 = Xi,G; 22. end if 23. end for 24. if SF ≠ ∅ then 25. Update XF; 26. Update P (A = k) (k = 1,2, …, D); 27. end if 28. G = G + 1; 29. Update storage A; 30. end while 31. f(Xgbest) = f(Xgbest,G), Xgbest = Xgbest,G; 32. Return Xgbest, and f(Xgbest); |
4. PID Controller Parameter Tuning Based on the Improved QUATRE Algorithm
- Set the search space of PID parameters, initialize the position of the three parameters of the particle, particle swarm size, number of iterations, and constant term C of the difference matrix.
- The position of each particle is transferred to the established PID control model PID MODEL, and the SIMULINK program is called to simulate and calculate the ITAE performance index of the controller as a fitness function which is then transmitted back to the QUATRE algorithm.
- Determine according to the ITAE performance index of the current particle swarm, search all particles to determine the optimal position of all, and perform position updates for individuals that meet the performance requirements.
- Judge whether it is required according to the termination condition. If the current situation meets the stop condition of the algorithm, exit the algorithm and take the current optimal position as the optimal proportional, integral, and differential coefficients of the PID controller. If not, perform a speed and position update operation, judge and limit particle update speed and optimization range, then execute Step 2.
5. Experiment Analysis
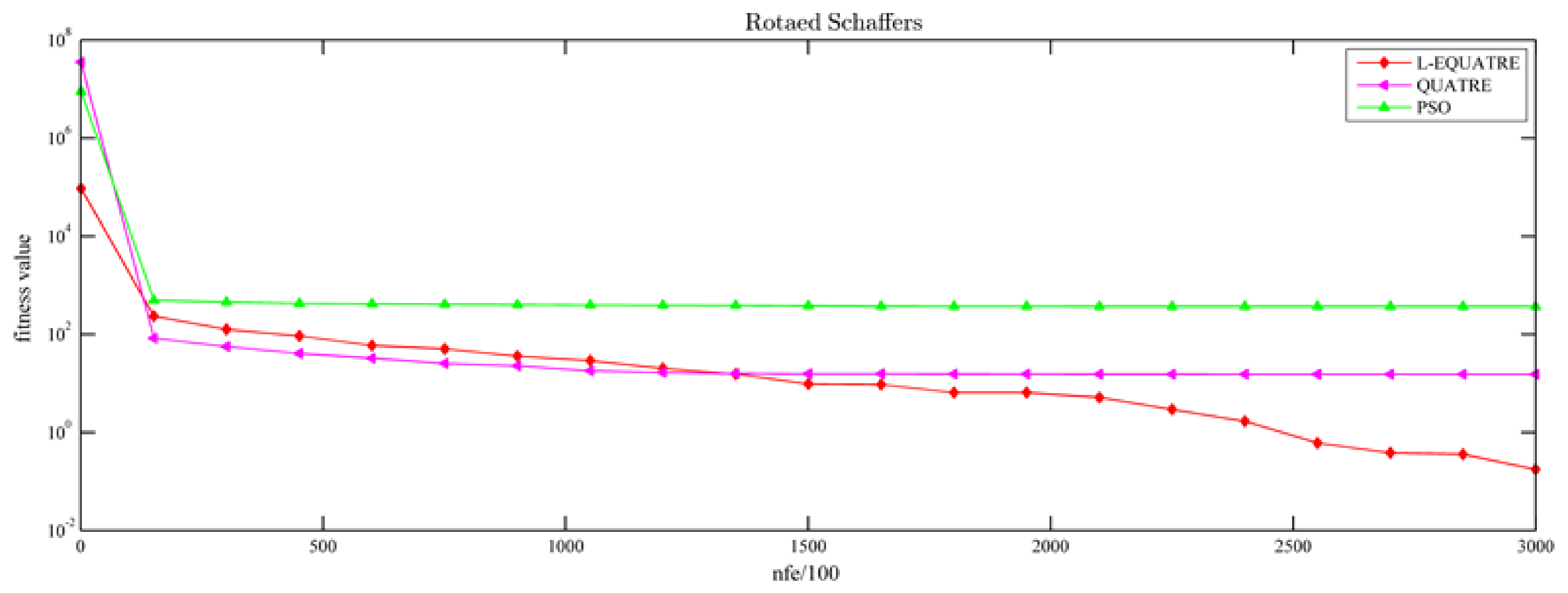
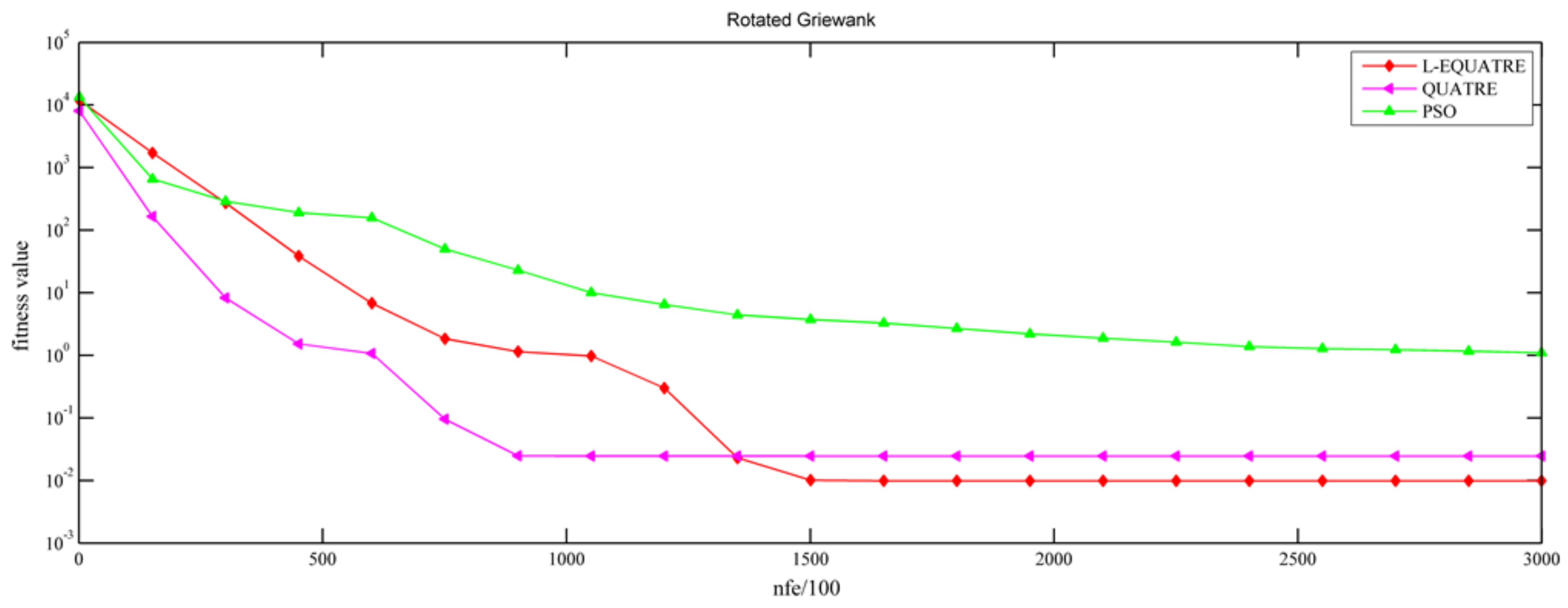
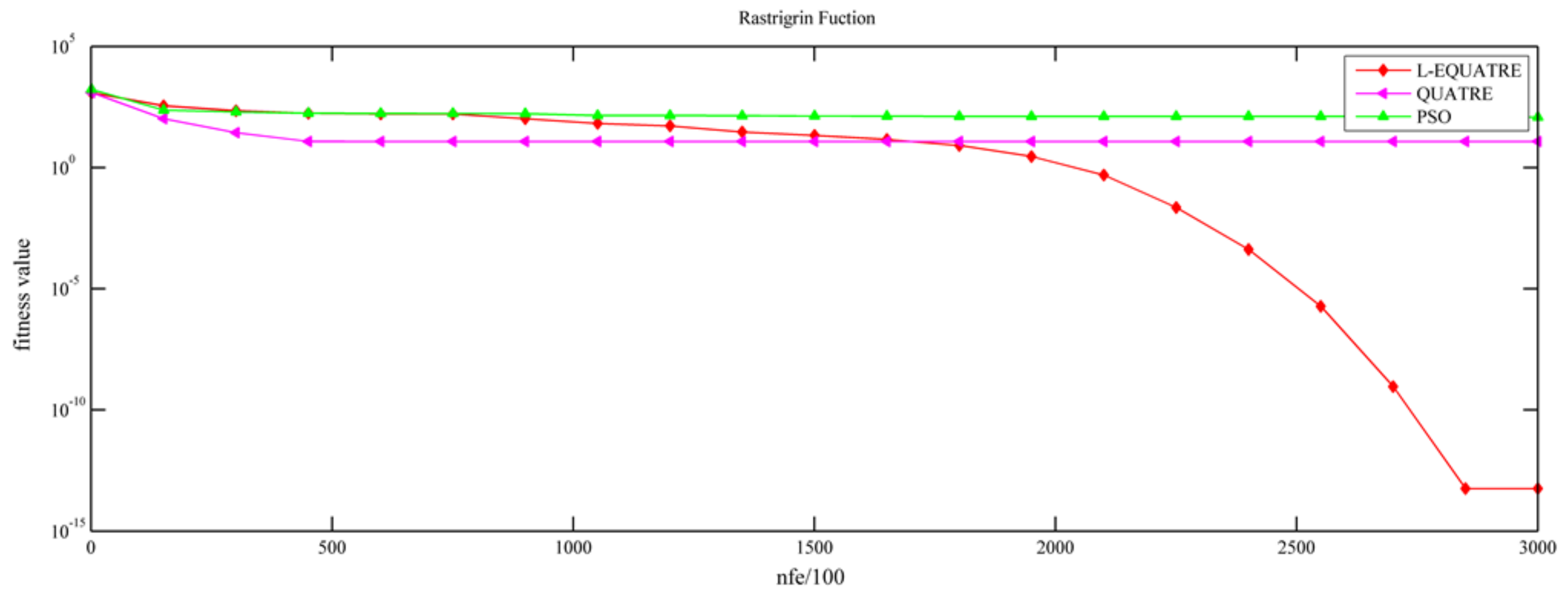
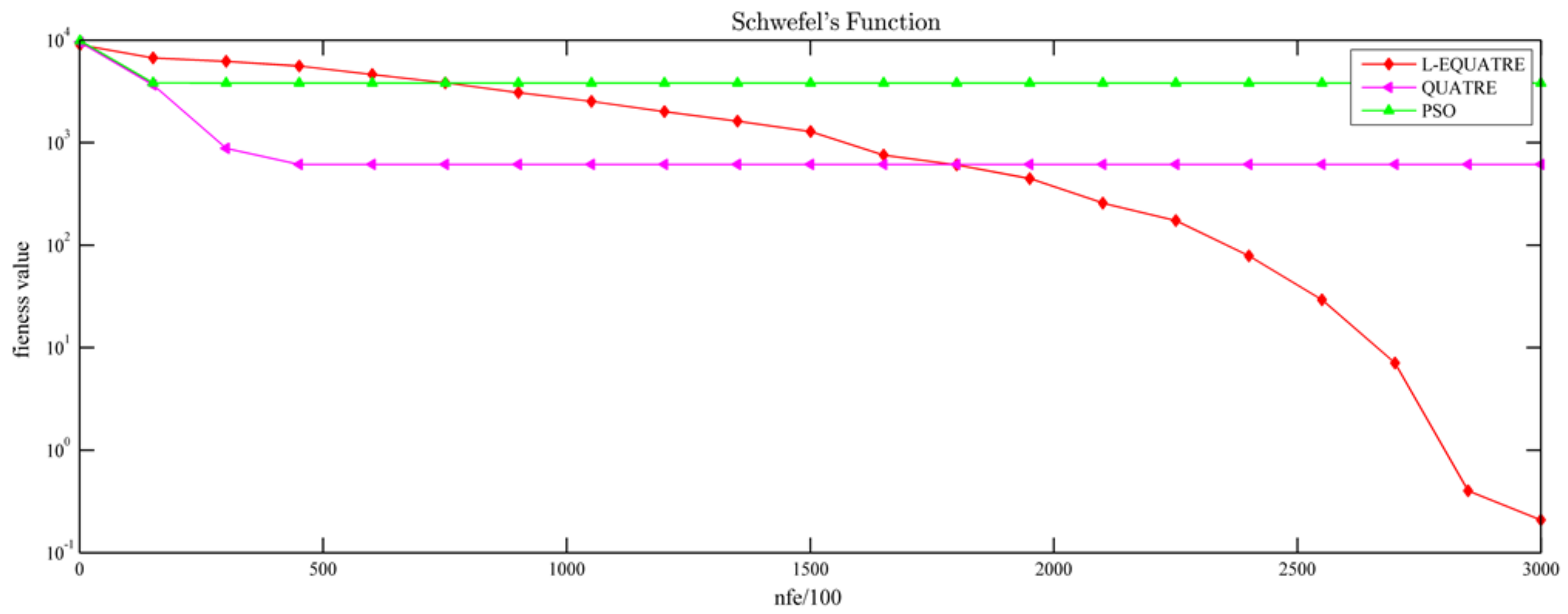
5.1. Analysis of Algorithm Experimental Results
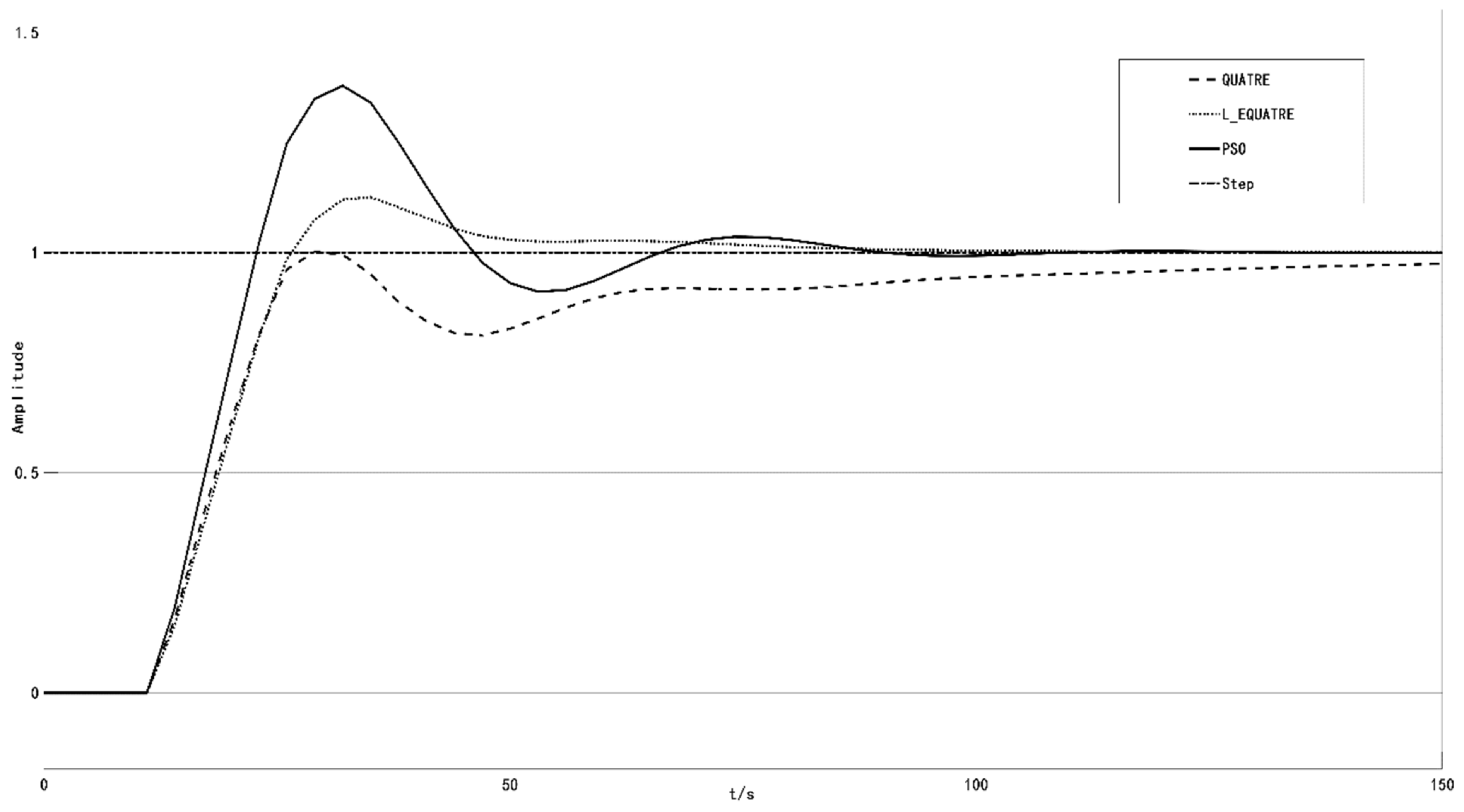
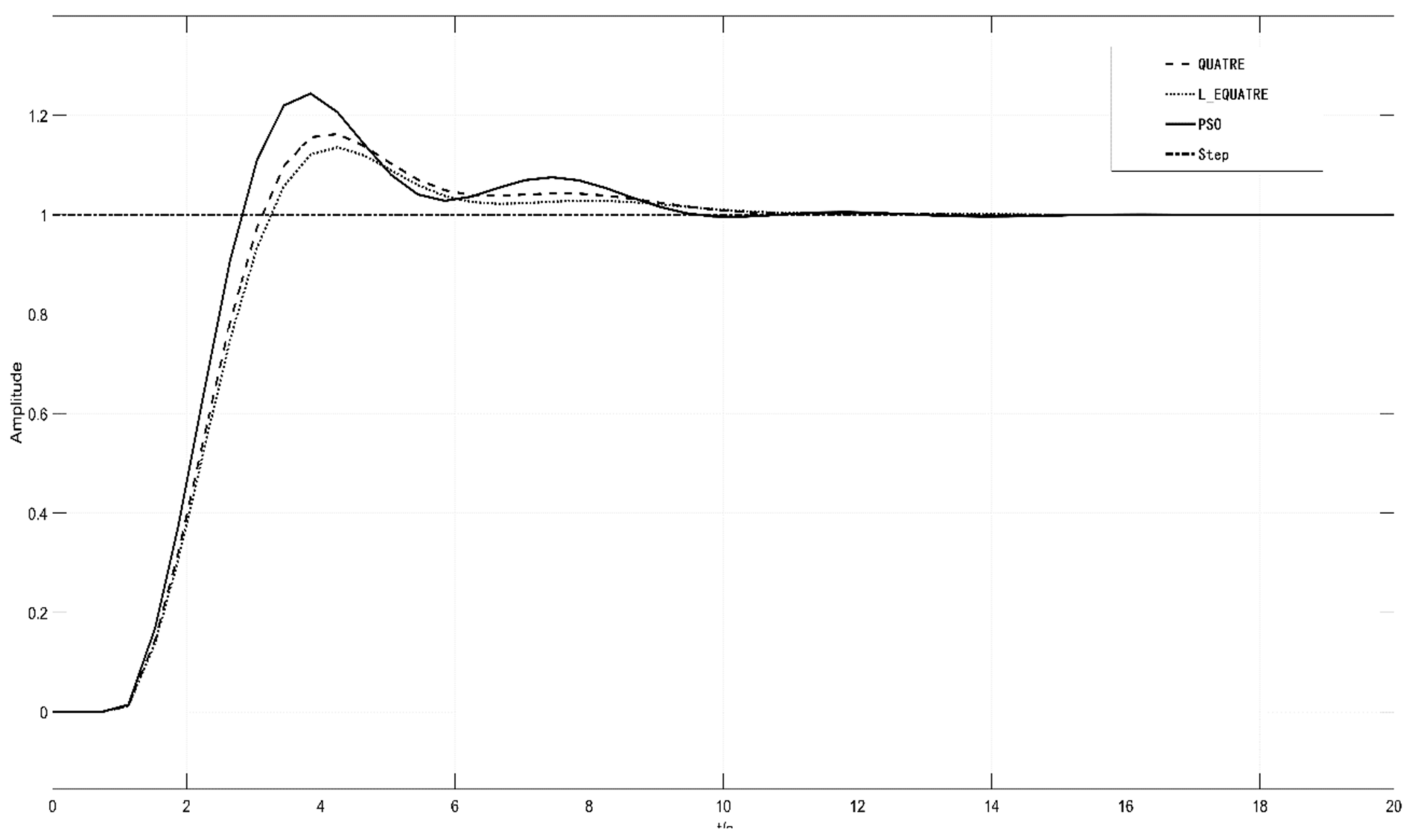
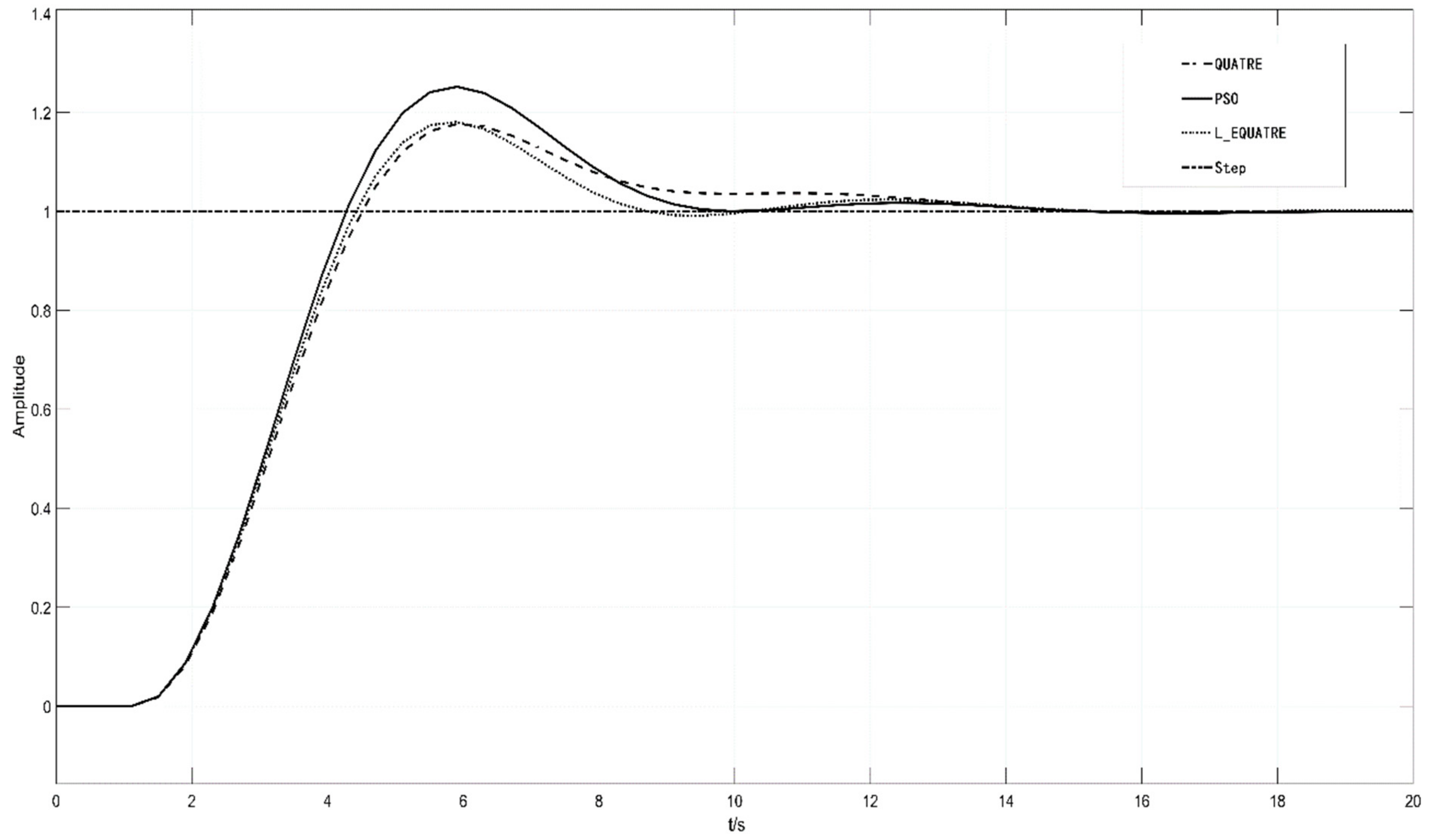
5.2. PID Parameter Tuning Experiment Results Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Pan, J.S.; Zhuang, J.W.; Luo, H.; Chu, S.C. Multi-group Flower Pollination Algorithm Based on Novel Communication Strategies. J. Internet Technol. 2021, 22, 257–269. [Google Scholar]
- Xue, X.; Chen, J. Optimizing ontology alignment through hybrid population-based incremental learning algorithm. Memet. Comput. 2018, 11, 154–196. [Google Scholar] [CrossRef]
- Hlaing, W.M.; Liu, S.J.; Pan, J.S. A Novel Solution for Simultaneously Finding the Shortest and Possible Paths in Complex Networks. J. Internet Technol. 2019, 20, 1693–1707. [Google Scholar]
- Dong, X.; Zhang, Y.; Yu, S. An Uneven Clustering Routing Protocol based on Improved K-means Algorithm for Wireless Sensor Network in Coal-mine. J. Inf. Hiding Multimed. Signal Process. 2019, 10, 53–62. [Google Scholar]
- Nguyen, T.T.; Pan, J.S.; Lin, J.C.; Dao, T.K.; Nguyen, T.X. An Optimal Node Coverage in Wireless Sensor Network Based on Whale Optimization Algorithm. Data Sci. Pattern Recogn. 2018, 2, 11–21. [Google Scholar]
- Wu, C.M.; Shirui, F.; Li, T.T. Research of The WSN Routing based on Artificial Bee Colony Algorithm. J. Inf. Hiding Multimed. Signal Process. 2017, 8, 120–126. [Google Scholar]
- Pan, J.S.; Nguyen, T.-L.P.; Ngo, T.-G.; Dao, T.-K.; Nguyen, T.-T.-T.; Nguyen, T.-T. An Optimizing Cross-Entropy Thresholding for Image Segmentation based on Improved Cockroach Colony Optimization. J. Inf. Hiding Multimed. Signal Process. 2020, 11, 162–171. [Google Scholar]
- Pan, J.S.; Wang, X.P.; Chu, S.C.; Nguyen, T.-T. A Multi-group Grasshopper Optimisation Algorithm for Application in Capacitated Vehicle Routing Problem. Data Sci. Pattern Recogn. 2020, 4, 41–56. [Google Scholar]
- Xue, X.; Pan, J.S. A Compact Co-Evolutionary Algorithm for sensor ontology meta-matching. Knowl. Inf. Syst. 2017, 56, 335–353. [Google Scholar] [CrossRef]
- Stuart, B. The past of PID controller. Annu. Rev. Control 2001, 25, 43–53. [Google Scholar]
- Ziegler, J.G.; Nichols, N.B. Optimum Setting for Automatic Controllers. Trans. ASME 1942, 64, 759–768. [Google Scholar] [CrossRef]
- Cohen, G.H.; Coon, G.A. Theoretieal Consideration of Retarded Control. Trans. ASME 1953, 75, 827–833. [Google Scholar]
- Astrom, K.J.; Hagglund, T. Automatic Tuning of Simple Regulators with Specfications on Phase and Amplitude Margrins. Automatiea 1984, 20, 645–651. [Google Scholar] [CrossRef] [Green Version]
- Rivera, D.E.; Morari, M.; Skogestad, S. Interal model control-4.PID controller design. Ind. Eng. Chem. Process. Des. Dev. 1986, 25, 252–265. [Google Scholar] [CrossRef]
- Hang, C.C.; Astrom, K.J. How Rfinements of the Ziegler-Nichols Tuning Formula. IEEE Proc. 1991, 137, 111–118. [Google Scholar] [CrossRef]
- Baras, J.S.; Patel, N.S. Derivation of Fuzzy Rules for Parameter Free PID Gain Tuning. Adv. Control Chem. Process. 1994, 27, 303–308. [Google Scholar]
- Zhu, M. Research on the Design of Fuzzy PID Controller. 1994. Available online: http://cdmd.cnki.com.cn/Article/CDMD-10056-2006053125.htm (accessed on 1 April 2021).
- Wang, K.Q.; Cao, J.; Jiao, J.; Zhang, X.D. Self Tuning of PID Controller Parameters Based on Neural Network. 1996. Available online: https://www.cnki.com.cn/Article/CJFDTotal-DBLY199603015.htm (accessed on 1 April 2021).
- Wu, C.J.; Huang, C.H. A hybrid method for parameter tuning of PID controllers. J. Frankl. Inst. 1997, 334, 547–562. [Google Scholar] [CrossRef]
- Li, W.; Zhao, Q. A Multivariable Fuzzy Self Tuning PID Controller Based on Neural Network. 1998. Available online: https://en.cnki.com.cn/Article_en/CJFDTotal-DLTD801.010.htm (accessed on 1 April 2021).
- Shao, Y.Y. PID Parameters Tuning Based on a Self-Adaptive Immunity Ant Colony Algorithm. In Proceedings of the 2013 3rd Interational Conference on Electric and Electronics (EEIC 2013), Hong Kong, China, 24 December 2013. [Google Scholar]
- Maraba, V.A.; Kuzucuoglu, A.E. PID Neural Network Based Speed Control of Asynchronous Motor Using Programmable Logic Controller. Adv. Electr. Comput. Eng. 2001, 11, 23–28. [Google Scholar] [CrossRef]
- Zou, H.B.; Chai, T.; Bao, G. Application of Improved BBO Algorithm in PID Parameter Tuning. 2019. Available online: https://www.cnki.com.cn/Article/CJFDTotal-ZHJC201912019.htm (accessed on 1 April 2021).
- Wang, G.R.; Zhang, J.L. PID parameter tuning of hydro generator unit based on improved particle swarm optimization algorithm. Sinotrans 2019, 19, 92–94. [Google Scholar]
- Zhou, L.X.; Chen, Y.Z.; Ji, P.P. Application of multi-objective particle swarm optimization algorithm in PID optimization design. Wuhan Voc. Tech. Coll. Acta Sin. Sin. 2019, 18, 90–94. [Google Scholar]
- Meng, Z.Y.; Pan, J.S.; Xu, H. QUasi-Affine TRansformation Evolutionary (QUATRE) algorithm: A cooperative swarm based algorithm for global optimization. Knowl. Based Syst. 2016, 109, 104–121. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle Swarm Optimization/Icnn95-international Conference on Neural Networks. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995. [Google Scholar]
- Meng, Z.; Chen, Y.; Li, X.; Yang, C.; Zhong, Y. Enhancing QUasi-Affine TRansformation Evolution (QUATRE) with adaptation scheme on numerical optimization. Knowl. Based Syst. 2020, 197, 105908. [Google Scholar] [CrossRef]
- Li, Y.; Ang, K.H.; Chong, G.C. PID control system analysis and design. IEEE Control Syst. Mag. 2006, 26, 32–41. [Google Scholar]
- Crowe, J.; Chen, G.R.; Ferdous, R.; Greenwood, D.R.; Grimble, M.J.; Huang, H.P.; Jeng, J.C.; Johnson, M.A.; Katebi, M.R.; Kwong, S.; et al. PID Control: New Identification and Design Methods; Springer: Berlin, Germany, 2005; pp. 473–524. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mathematical Model | Properties of the Model |
|---|---|
| First-order delay mode | |
| Second-order delay model | |
| Third-order delay model |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Z.-Q.; Liu, S.-J.; Pan, J.-S. A PID Parameter Tuning Method Based on the Improved QUATRE Algorithm. Algorithms 2021, 14, 173. https://doi.org/10.3390/a14060173
Zhao Z-Q, Liu S-J, Pan J-S. A PID Parameter Tuning Method Based on the Improved QUATRE Algorithm. Algorithms. 2021; 14(6):173. https://doi.org/10.3390/a14060173
Chicago/Turabian StyleZhao, Zhuo-Qiang, Shi-Jian Liu, and Jeng-Shyang Pan. 2021. "A PID Parameter Tuning Method Based on the Improved QUATRE Algorithm" Algorithms 14, no. 6: 173. https://doi.org/10.3390/a14060173
APA StyleZhao, Z. -Q., Liu, S. -J., & Pan, J. -S. (2021). A PID Parameter Tuning Method Based on the Improved QUATRE Algorithm. Algorithms, 14(6), 173. https://doi.org/10.3390/a14060173