
Computational Analysis of PDE-Based Shape Analysis Models by Exploring the Damped Wave Equation


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Theoretical Background
2.1. Basics on Geometry of Shapes
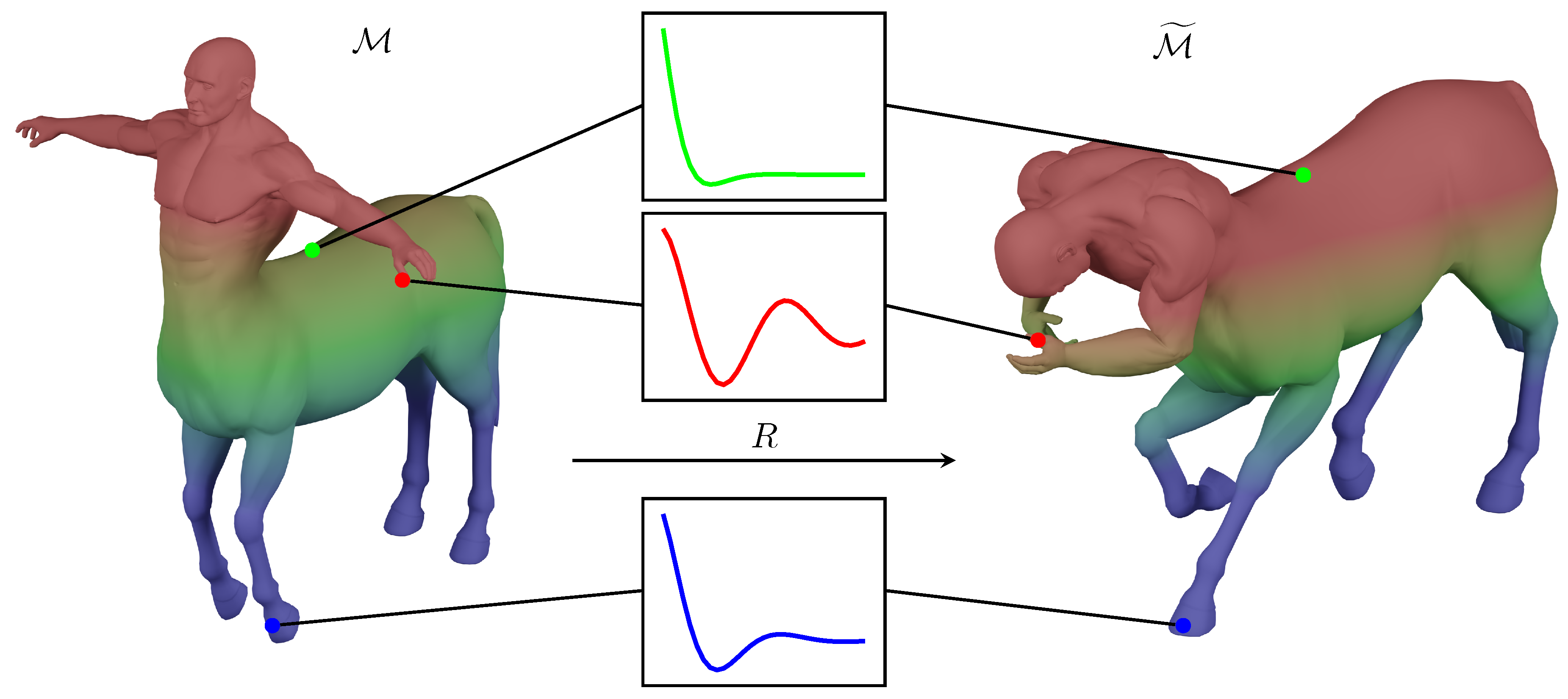
2.2. Shape Correspondence
2.2.1. Feature Descriptor
2.2.2. Metric
2.3. PDE-Based Models
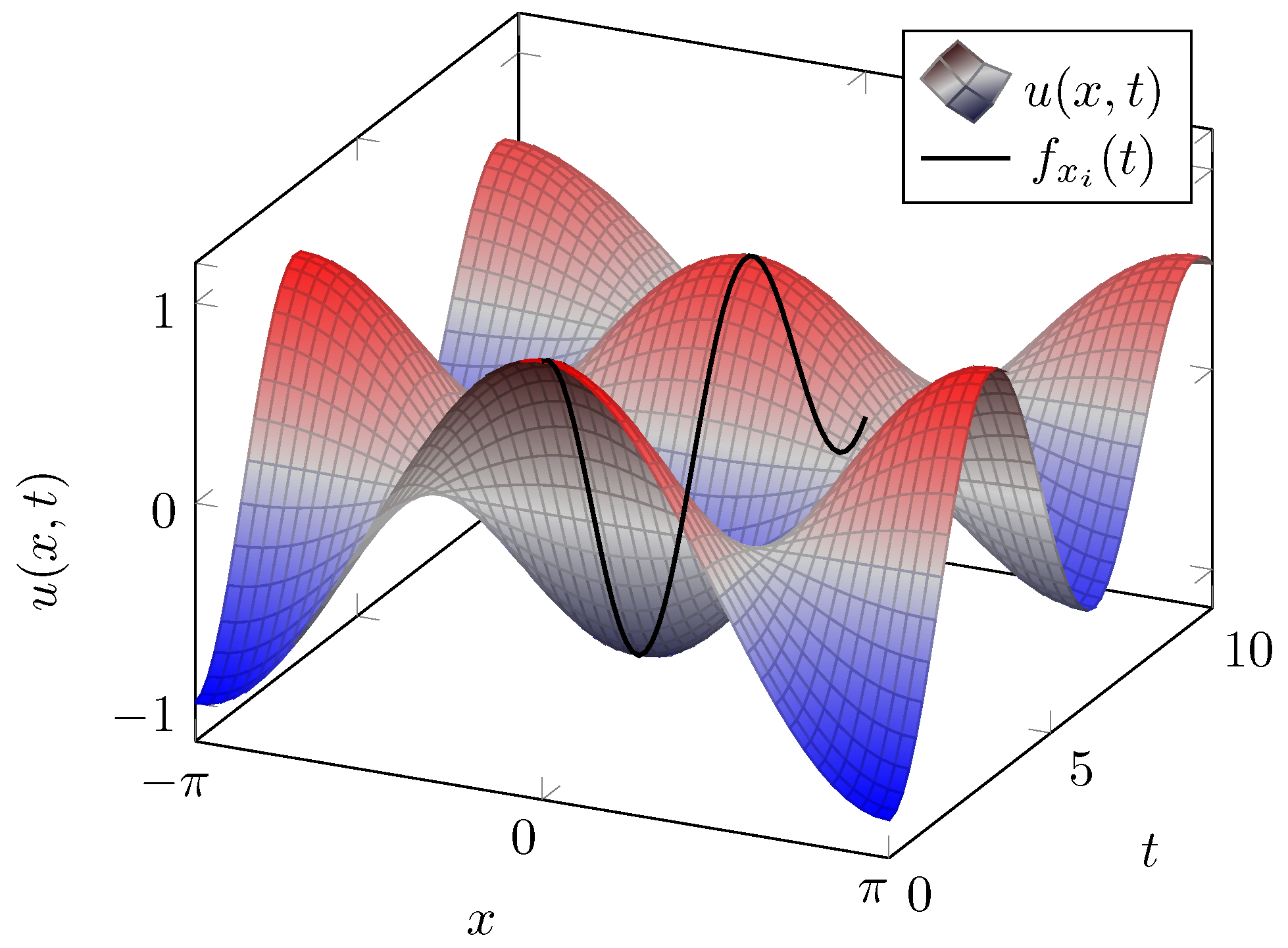
2.3.1. Wave Equation and Damped Wave Equation
2.3.2. Initial Conditions
3. Basic Discretisation
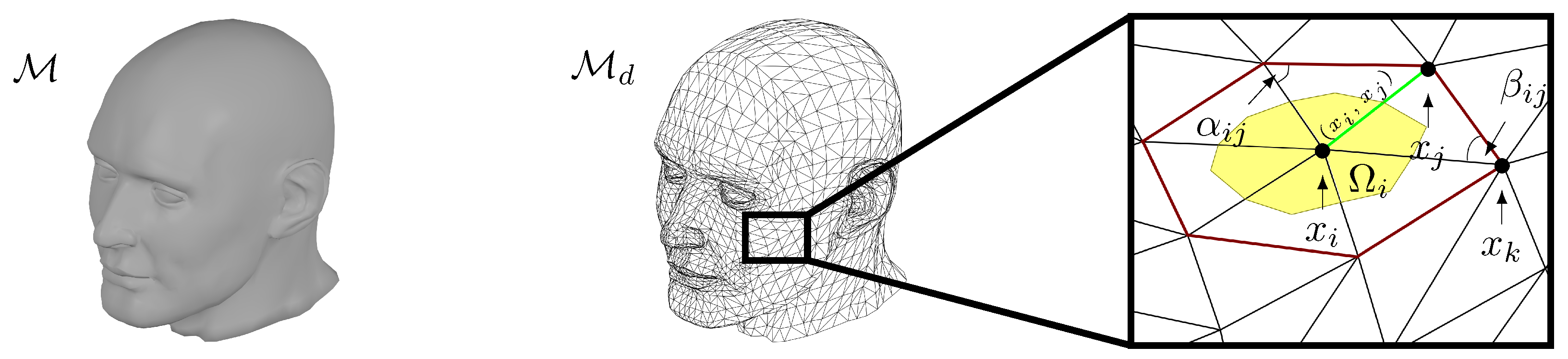
3.1. Spatial Discretisation
3.2. Eigenproblem and Modal Coordinate Reduction
3.3. Improvement of the Eigenvalue Computation
3.4. Time Discretisation
3.4.1. Implicit Euler and Crank–Nicolson
3.4.2. Second-Order Time Integration
4. Experimental Settings
4.1. Dataset
4.2. Evaluation and Reference Models
4.3. Our Code
| Algorithm 1: Shape Matching MOR Method |
 |
5. Introductory Synthetic Tests
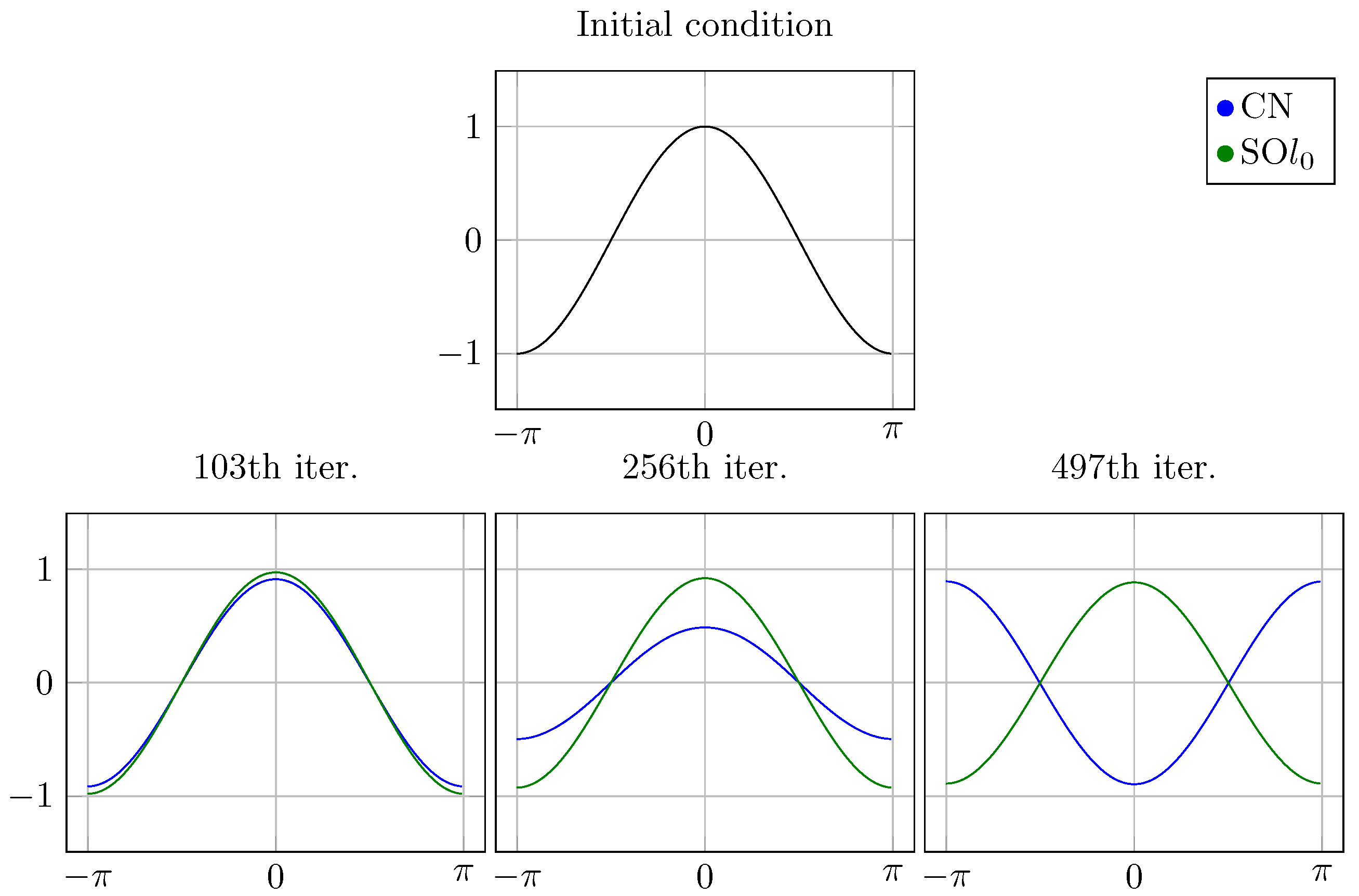
5.1. Academic Examples
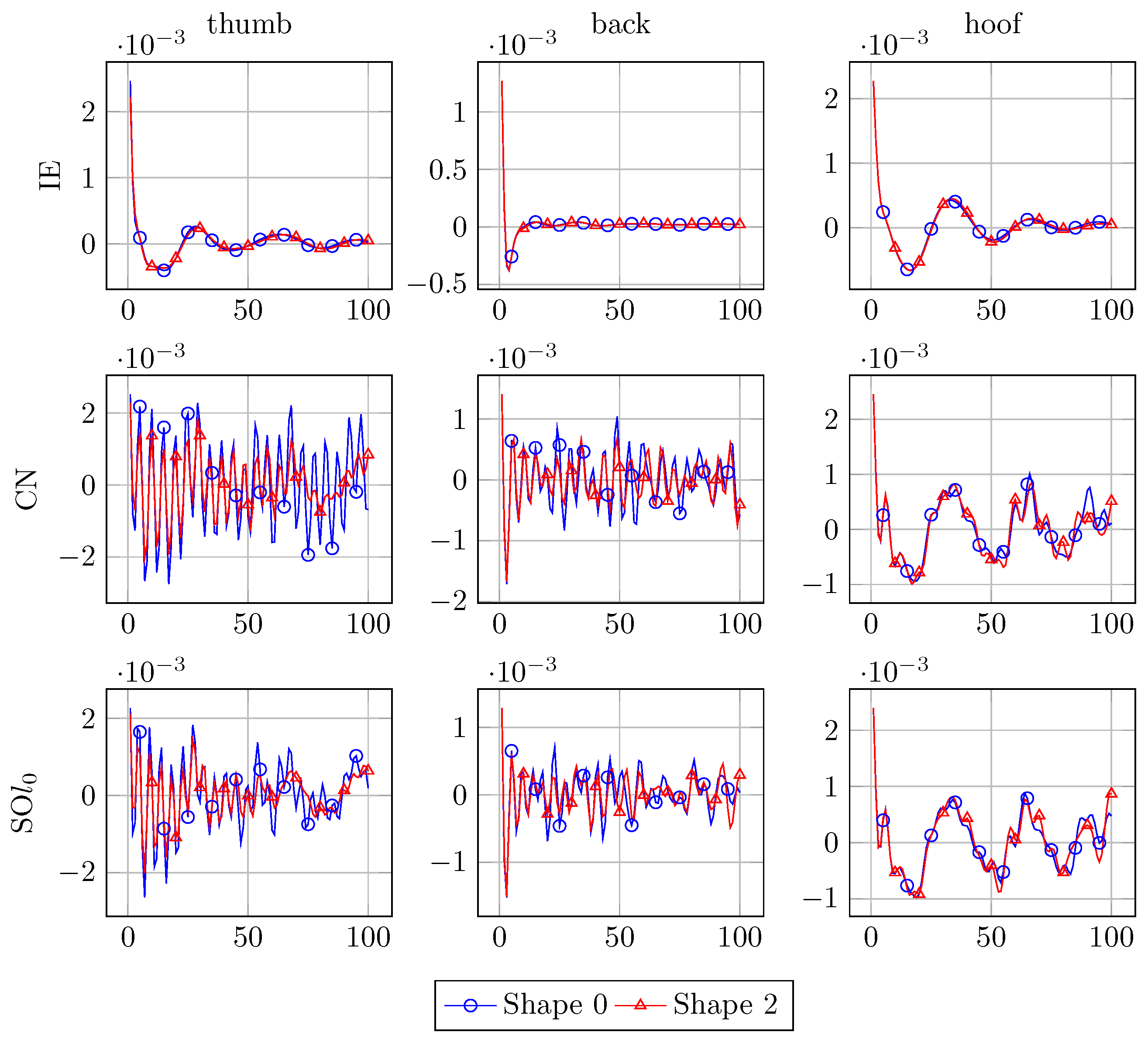
5.2. Experiments
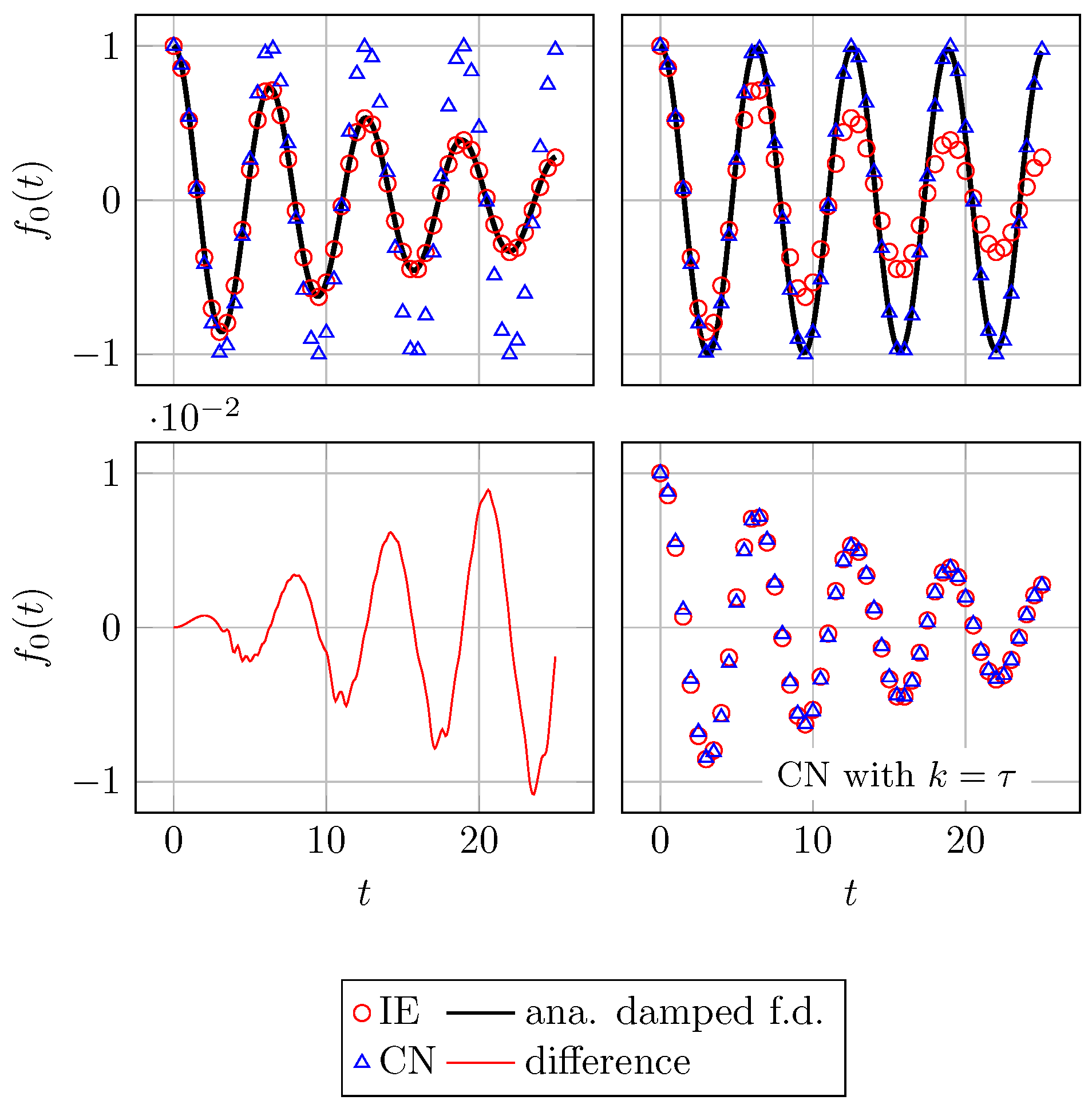
5.2.1. Details for the Damped Wave Equation
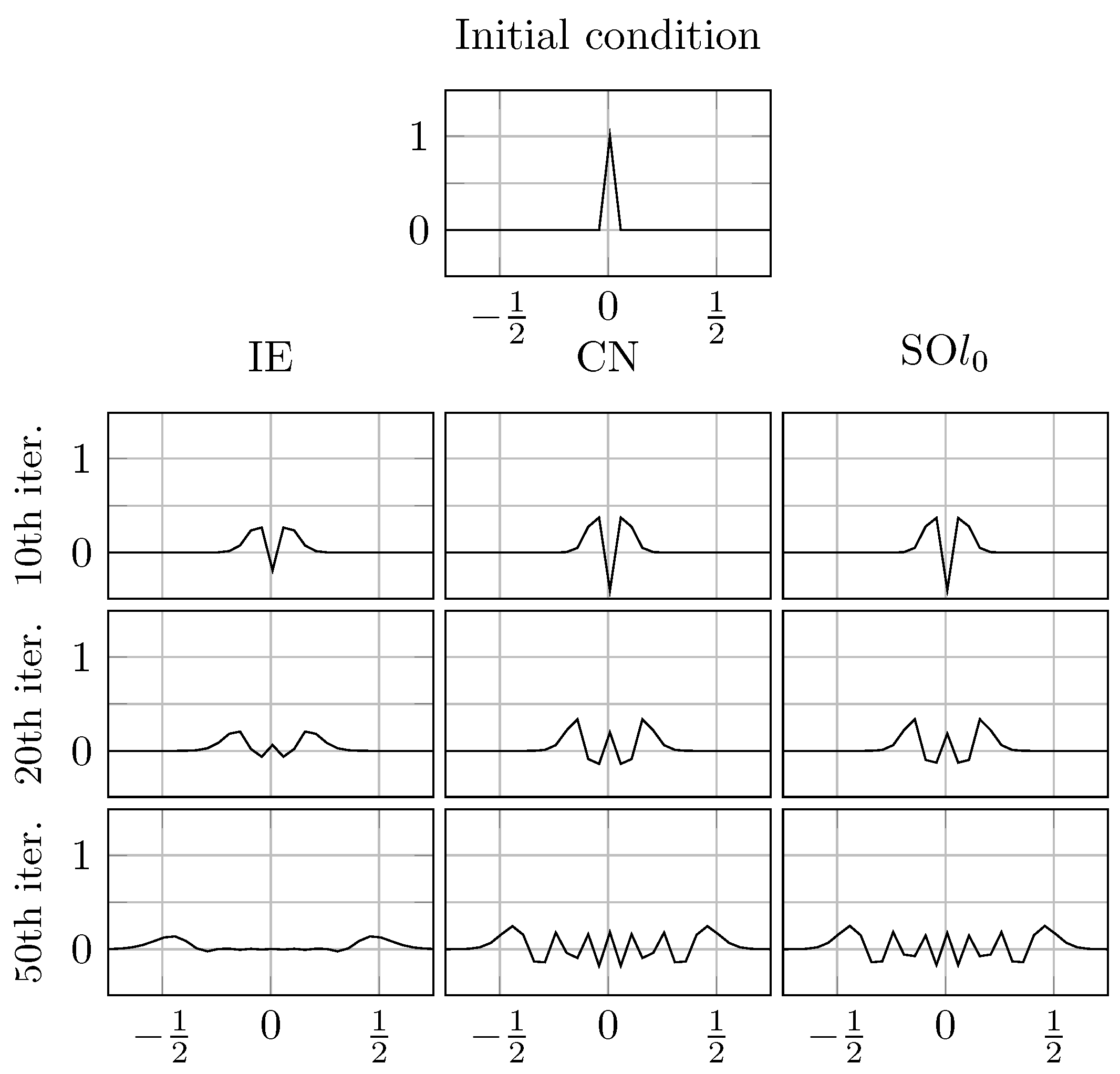
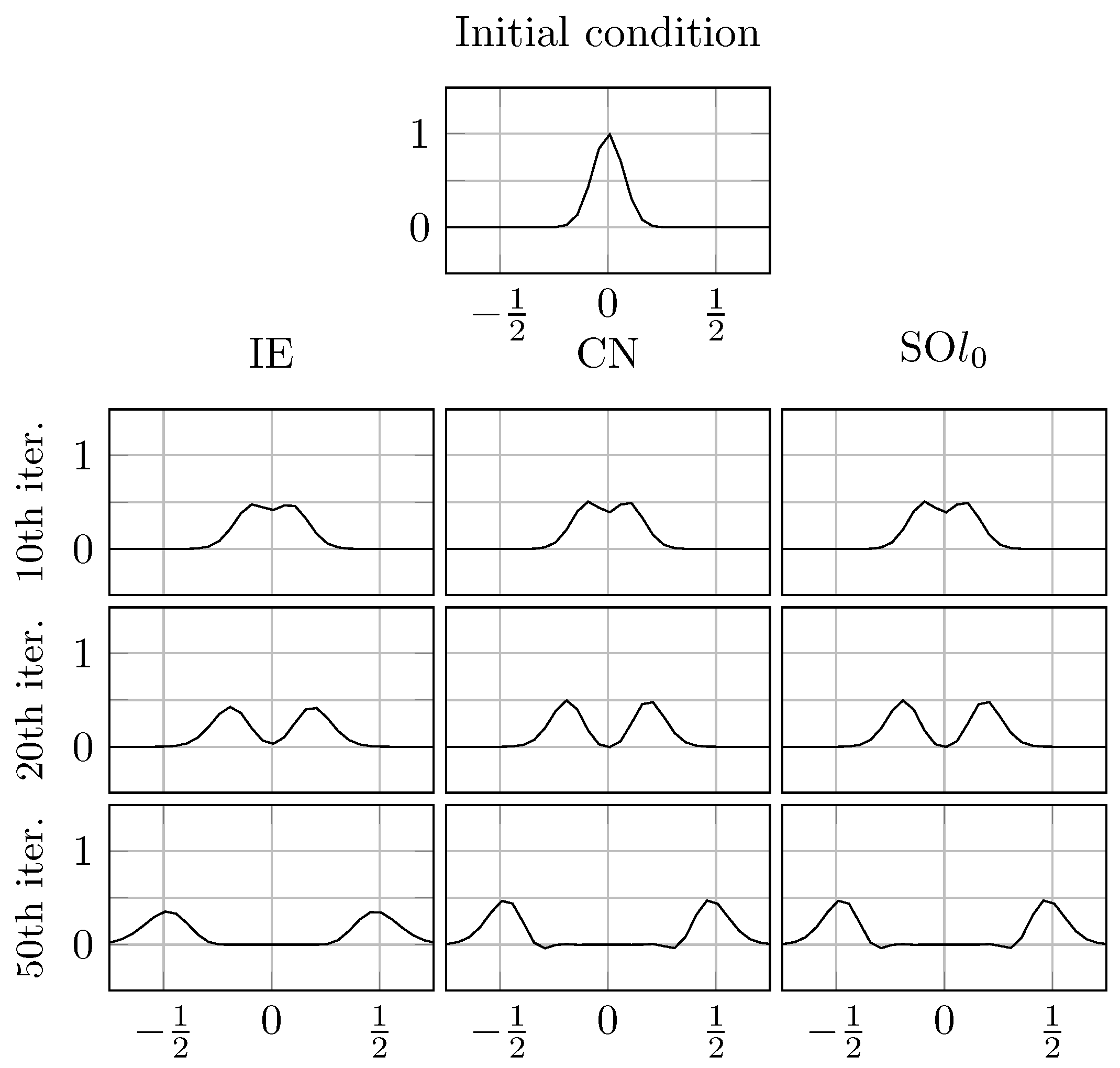
5.2.2. Details for the Gaussian Initial Condition
6. Experiments on Shapes
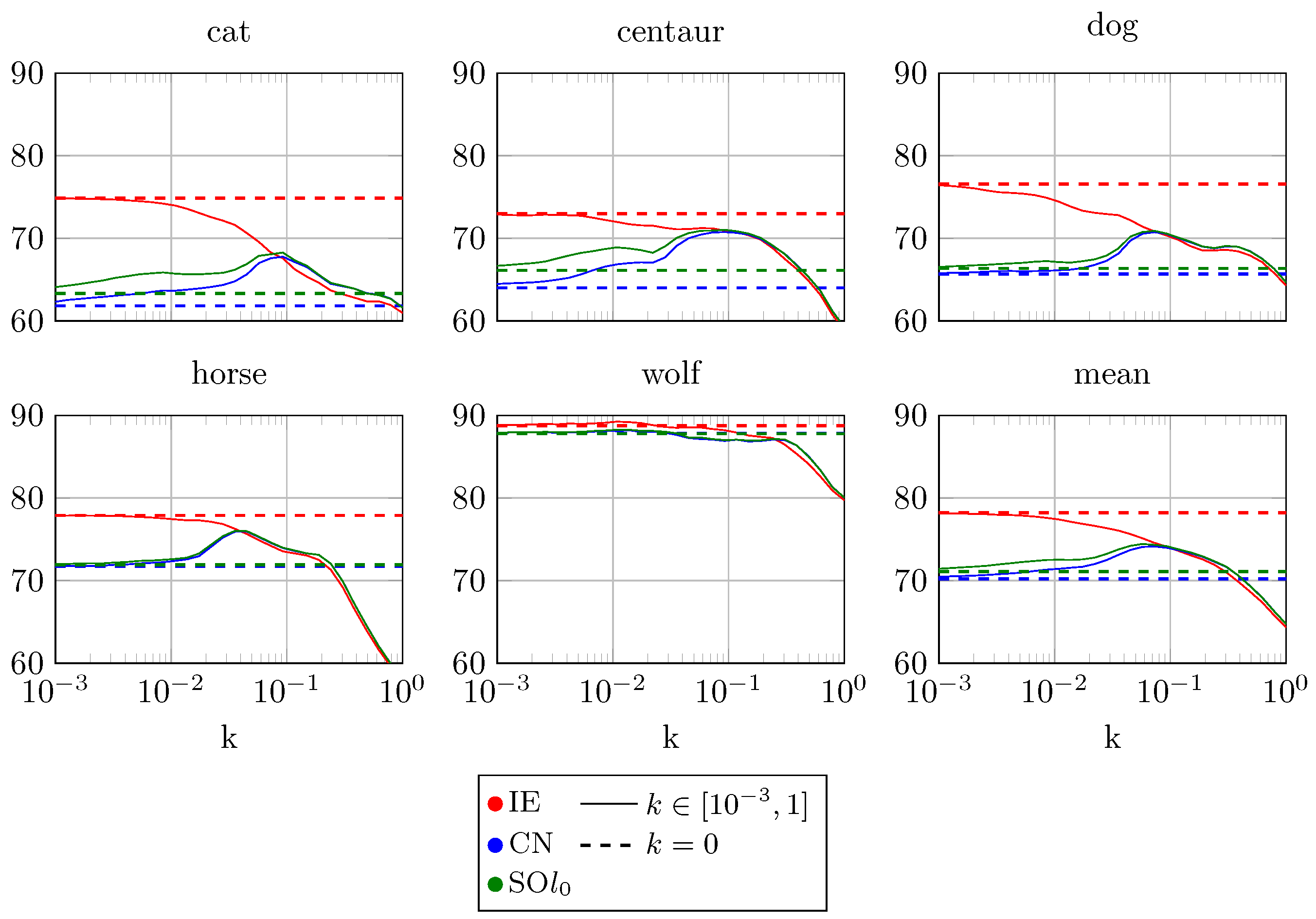
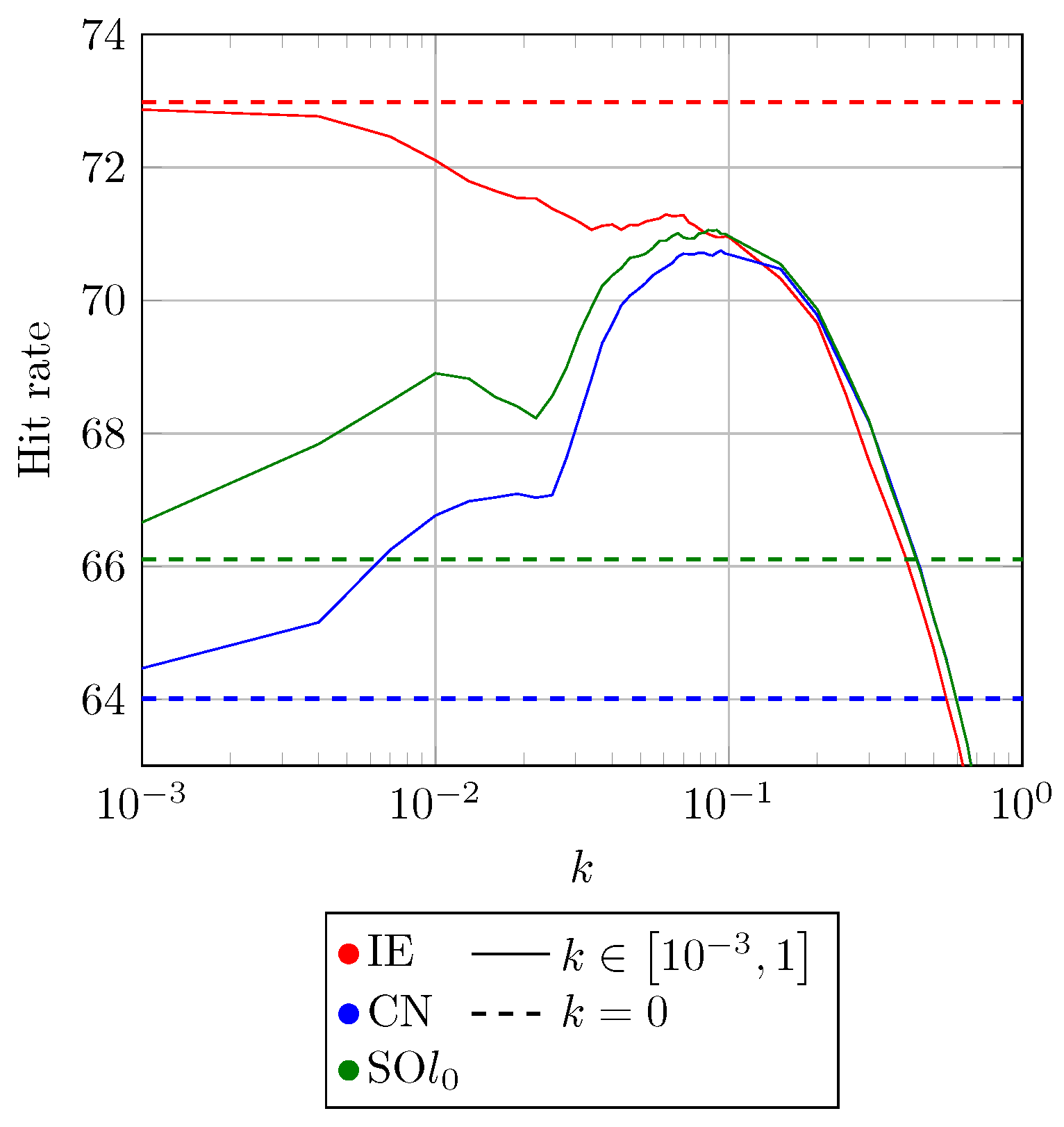
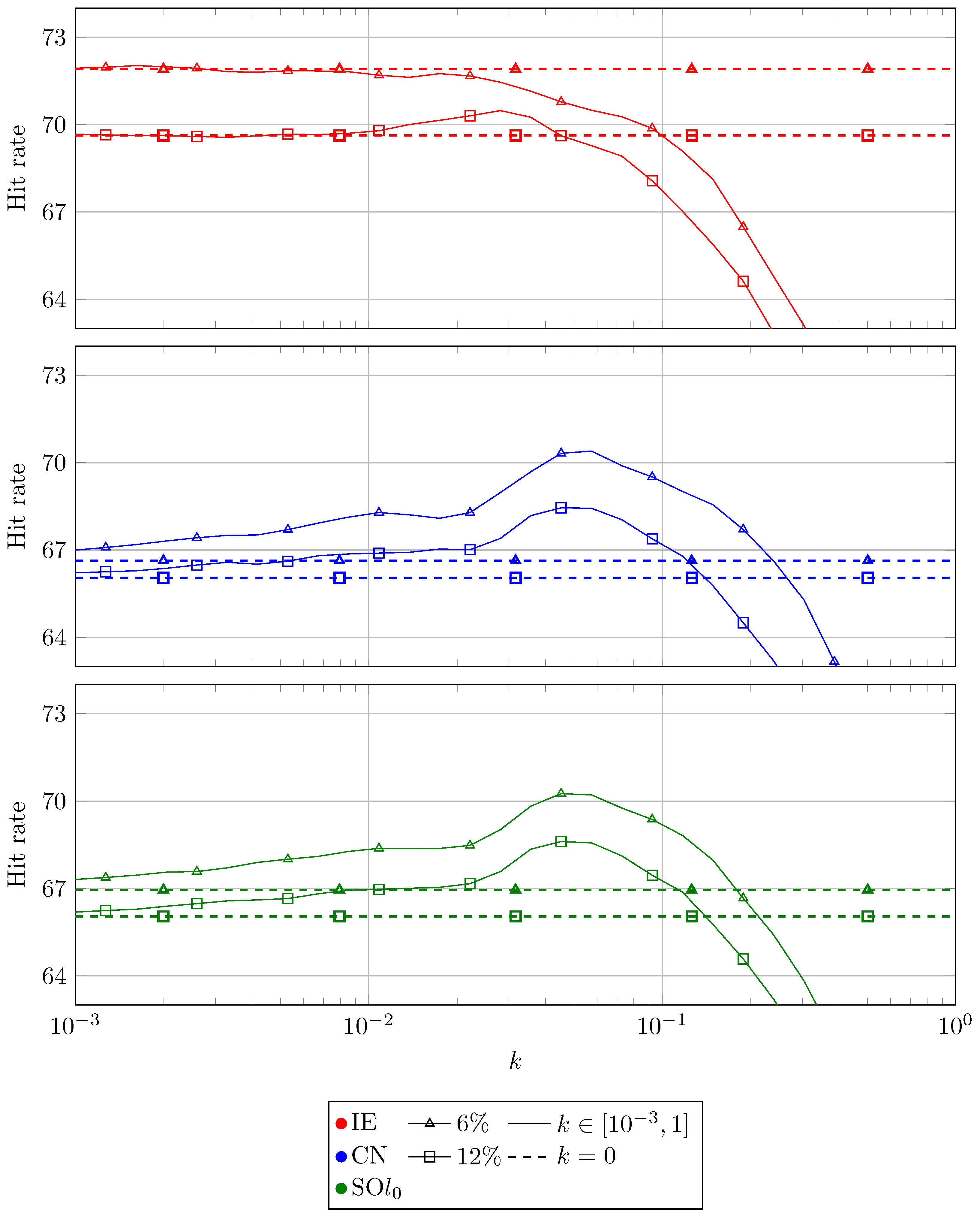
6.1. Study of the Damping Parameter
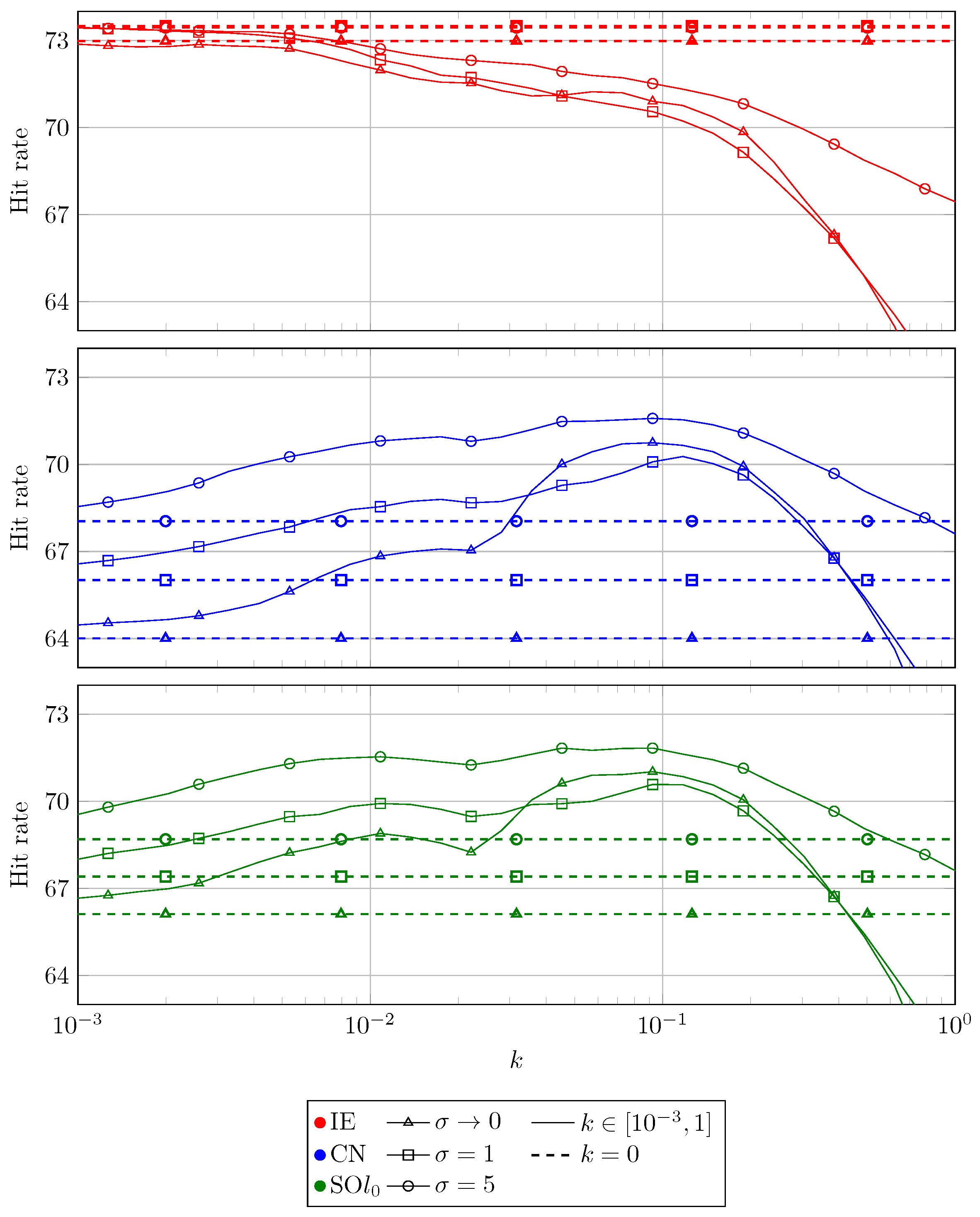
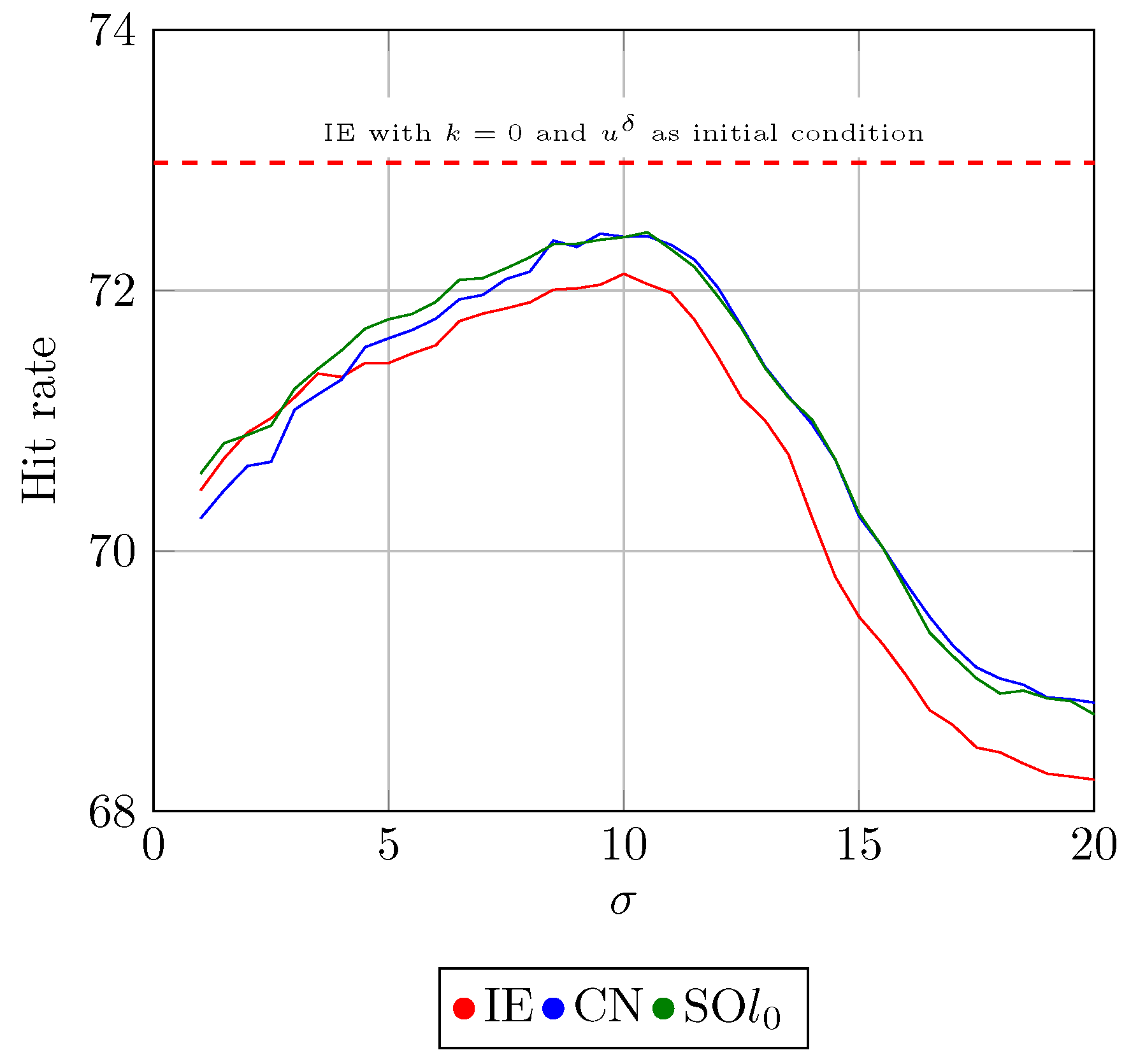
6.2. Gaussian Initial Condition
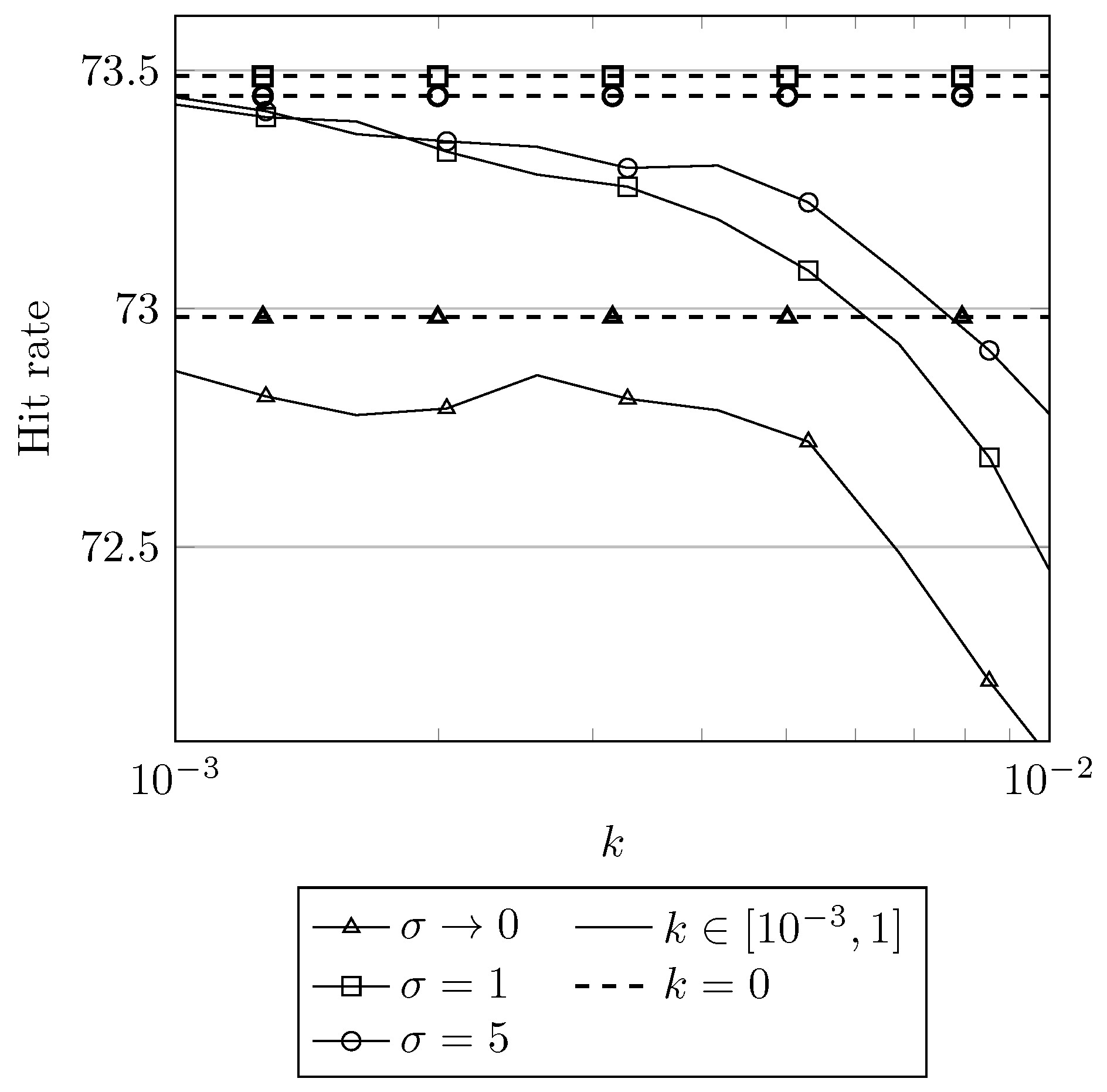
6.3. Changing Width in Gaussian Initial Conditions
6.4. Feature Descriptors with Optimised Parameters
6.5. Noisy Shape Experiments
7. Conclusions and Further Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- van Kaick, O.; Zhang, H.; Hamarneh, G.; Cohen-Or, D. A Survey on Shape Correspondence. Comput. Graph. Forum 2011, 30, 1681–1707. [Google Scholar] [CrossRef]
- Bronstein, A.M.; Bronstein, M.M.; Kimmel, R. Numerical Geometry of Non-Rigid Shapes; Springer GmbH: New York, NY, USA, 2008. [Google Scholar]
- Rustamov, R.M. Laplace-Beltrami Eigenfunctions for Deformation Invariant Shape Representation, functional map. In Proceedings of the Fifth Eurographics Symposium on Geometry Processing, SGP ’07, Barcelona Spain, 4–6 July 2007; Eurographics Association: Goslar, Germany, 2007; pp. 225–233. [Google Scholar]
- Sun, J.; Ovsjanikov, M.; Guibas, L. A Concise and Provably Informative Multi-Scale Signature Based on Heat Diffusion. Comput. Graph. Forum 2009, 28, 1383–1392. [Google Scholar] [CrossRef]
- Aubry, M.; Schlickewei, U.; Cremers, D. The wave kernel signature: A quantum mechanical approach to shape analysis. In Proceedings of the 2011 IEEE International Conference on Computer Vision Workshops (ICCV Workshops), Barcelona, Spain, 6–13 November 2011. [Google Scholar]
- Dachsel, R.; Breuß, M.; Hoeltgen, L. The Classic Wave Equation Can Do Shape Correspondence. In Proceedings of the Computer Analysis of Images and Patterns; Felsberg, M., Heyden, A., Krüger, N., Eds.; Springer International Publishing: Cham, Switzerland, 2017; Volume 10424, pp. 264–275. [Google Scholar]
- Dachsel, R.; Breuß, M.; Hoeltgen, L. Shape Matching by Time Integration of Partial Differential Equations. In Proceedings of the Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2017; Volume 10302, pp. 669–680. [Google Scholar]
- Bähr, M.; Breuß, M.; Dachsel, R. Fast Solvers for Solving Shape Matching by Time Integration. In Proceedings of the OAGM Workshop 2018, Hall/Tirol, Austria, 15–16 May 2018; Welk, M., Urschler, M., Roth, P.M., Eds.; Verlag der Technischen Universität: Graz, Austria, 2018; pp. 65–72. [Google Scholar] [CrossRef]
- Bähr, M. Efficient Time Integration Methods for Linear Parabolic Partial Differential Equations with Applications. Ph.D. Thesis, BTU Cottbus—Senftenberg, Cottbus, Germany, 2022. [Google Scholar] [CrossRef]
- Köhler, A.; Breuß, M. Towards Efficient Time Stepping for Numerical Shape Correspondence. In Proceedings of the Lecture Notes in Computer Science; Elmoataz, A., Fadili, J., Quéau, Y., Rabin, J., Simon, L., Eds.; Springer International Publishing: Cham, Switzerland, 2021; Volume 12679, pp. 165–176. [Google Scholar]
- Do Carmo, M.P. Differential Geometry of Curves and Surfaces: Revised and Updated Second Edition; Dover Publications: New York, NY, USA, 2016. [Google Scholar]
- Liu, D.; Xu, G.; Zhang, Q. A discrete scheme of Laplace–Beltrami operator and its convergence over quadrilateral meshes. Comput. Math. Appl. 2008, 55, 1081–1093. [Google Scholar] [CrossRef]
- Guo, K. 3D Shape Representation Using Gaussian Curvature Co-occurrence Matrix. In Proceedings of the Artificial Intelligence and Computational Intelligence; Wang, F.L., Deng, H., Gao, Y., Lei, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2010; pp. 373–380. [Google Scholar] [CrossRef]
- Xiao, P.; Barnes, N.; Caetano, T.; Lieby, P. An MRF and Gaussian Curvature Based Shape Representation for Shape Matching. In Proceedings of the 2007 IEEE Conference on Computer Vision and Pattern Recognition, Minneapolis, MN, USA, 17–22 June 2007; pp. 1–7. [Google Scholar] [CrossRef]
- Sonar, T. Mehrdimensionale ENO-Verfahren; Number 1 in Advances in Numerical Mathematics; Vieweg + Teubner Verlag: Wiesbaden, Germany, 1997. [Google Scholar] [CrossRef]
- Meyer, M.; Desbrun, M.; Schröder, P.; Barr, A.H. Discrete Differential-Geometry Operators for Triangulated 2-Manifolds. In Proceedings of the Visualization and Mathematics III; Hege, H.-C., Polthier, K., Eds.; Springer: Berlin/Heidelberg, Germany, 2003; pp. 35–57. [Google Scholar]
- Belkin, M.; Sun, J.; Wang, Y. Discrete Laplace Operator on Meshed Surfaces. In Proceedings of the Twenty-Fourth Annual Symposium on Computational Geometry; Association for Computing Machinery, New York, NY, USA, 9–11 June 2008; pp. 278–287. [Google Scholar]
- Reuter, M.; Biasotti, S.; Giorgi, D.; Patanè, G.; Spagnuolo, M. Discrete Laplace–Beltrami operators for shape analysis and segmentation. Comput. Graph. 2009, 33, 381–390. [Google Scholar] [CrossRef]
- Nouri, S. Advanced Model-Order Reduction Techniques for Large Scale Dynamical Systems. Ph.D. Thesis, Carleton University, Ottawa, ON, Canada, 2014. [Google Scholar]
- Qu, Z.Q. Model Order Reduction Techniques with Applications in Finite Element Analysis; Springer: London, UK, 2004. [Google Scholar]
- Twizell, E.H.; Gumel, A.B.; Arigu, M.A. Second-order,L0-stable methods for the heat equation with time-dependent boundary conditions. Adv. Comput. Math. 1996, 6, 333–352. [Google Scholar] [CrossRef]
- Kim, V.G.; Lipman, Y.; Funkhouser, T. Blended Intrinsic Maps. ACM Trans. Graph. 2011, 30, 1–12. [Google Scholar] [CrossRef]
- Warming, R.F.; Hyett, B.J. The modified equation approach to the stability and accuracy analysis of finite-difference methods. J. Comput. Phys. 1974, 14, 159–179. [Google Scholar] [CrossRef]
- Jerri, A.J. The Gibbs Phenomenon in Fourier Analysis, Splines and Wavelet Approximations; Springer: Boston, MA, USA, 1998. [Google Scholar]

















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Köhler, A.; Breuß, M. Computational Analysis of PDE-Based Shape Analysis Models by Exploring the Damped Wave Equation. Algorithms 2022, 15, 304. https://doi.org/10.3390/a15090304
Köhler A, Breuß M. Computational Analysis of PDE-Based Shape Analysis Models by Exploring the Damped Wave Equation. Algorithms. 2022; 15(9):304. https://doi.org/10.3390/a15090304
Chicago/Turabian StyleKöhler, Alexander, and Michael Breuß. 2022. "Computational Analysis of PDE-Based Shape Analysis Models by Exploring the Damped Wave Equation" Algorithms 15, no. 9: 304. https://doi.org/10.3390/a15090304
APA StyleKöhler, A., & Breuß, M. (2022). Computational Analysis of PDE-Based Shape Analysis Models by Exploring the Damped Wave Equation. Algorithms, 15(9), 304. https://doi.org/10.3390/a15090304