1. Introduction
State-of-the-art technological information processing happens mainly within the digital realm. Numerical values are quantized, and calculations are performed in discrete-time computational cycles. In contrast, the information carried by the physical world surrounding any technological device is analog and continuous. Twelve years after Alan Turing formalized the notion of digital computing [
1], Claude Shannon established the theoretical foundation of sampling and interpolation theory [
2]. Since then, scientists and engineers have extended Turing’s and Shannon’s theories and refined the relevant hardware, making the analog world increasingly accessible to digital information processing.
As follows from Shannon’s sampling theorem, suitable (infinite) interpolation series uniquely restore any bandlimited continuous-time signal, provided that the signal’s energy is finite and the samples are taken at least at the Nyquist rate. In its purest form, this result is present in signal processing and communications technology in the context of analog–digital/digital–analog conversion. In principle, however, any computational discretization method, such as finite-element algorithms, employs a similar paradigm: A set of discrete points, sufficiently dense for the in-between to become negligible, represents some continuous, physical object (c.f. [
3] for a recent example in which the physical “object” is an electromagnetic field).
Another recent concept in the domain of digital information processing is known as digital twinning. According to the formalization established in [
4], digital twinning commonly involves a physical entity to be twinned, a machine-readable description (in some machine-readable language) that represents the entity virtually on an appropriate hardware platform, and an interaction between the entity and its description through measurement and control. In this context, the machine-readable description is the entity’s digital twin. More generally, if the particular type of computing hardware is not specified, we refer to the entity’s virtual representation as a virtual twin. Furthermore, the term “entity” indicates that the virtual twin’s physical counterpart does not necessarily have to be an actual object. In theory, any abstract formation—such as, for example, an entire communication network [
5], or, as above, an electromagnetic field—qualifies for digital twinning, provided we can characterize it by a suitable mathematical model. Despite the different contexts, digital twinning resembles traditional Shannon Sampling and Interpolation (SSI) in some aspects. Both approaches represent a physical entity (in the context of SSI, a bandlimited signal) using digital data, digitalizing the relevant analog information through a sequential measurement process. However, classical SSI is geared towards completely restoring the physical entity, while digital twinning primarily aims to recover the entity’s relevant properties. Within the employed mathematical model, relevant properties usually take the form of a (mathematical) function or relation with a particular interpretation on the practical level, such as the position of a material object at a given time or the total energy contained in an electromagnetic field.
Originally associated primarily with Industry 4.0 [
6], digital twinning is attracting significant interest in many areas of modern technology. As part of the internet’s anticipated evolution towards a unified metaverse, even more facets of the physical environment will connect to virtual space. In particular, information processing will increasingly incorporate the interaction between human multi-modalities (human senses) and the digital domain, c.f. [
7]. In order to make human senses experienceable, the computational infrastructure will have to coordinate, process, and distribute the relevant information in real time. This requirement imposes engineers with unprecedented technological challenges regarding optimization, control, and decision-making. In this regard, research and development advocates digital twinning as one of several critical enablers. The novel technological applications that researchers envision in the context of digital twinning are just as ambitious. Medical research, for example, considers applications such as disease-trajectory estimation, optimization of medical-care timing, identification of biomarkers or elucidation of drug mechanisms, and patient-tailored prediction of treatment effects, employing digital twins of, e.g., a patient’s immune system [
8].
Given the potential for hazardous impacts of future digital-twinning applications on sensitive aspects of human well-being, the need to follow strict specifications on privacy, integrity, reliability, and safety is manifest. The upcoming 6G industry standard for communication technologies, which incorporates large parts of the technological infrastructure for the metaverse and other digital-twinning applications, summarizes such requirements by the term trustworthiness [
9]. Depending on the potential hazards of an application, the physical entity’s relevant properties must be reliably recoverable from the entity’s digital twin. In practice, technological systems for critical applications must undergo technology assessment, which evaluates the implementation with regard to criteria of provable performance. When expressed in mathematical terms, e.g., by a margin of error, the recovered property must almost surely meet, such criteria entail “sufficient” and “insufficient” ways of representing a physical entity in virtual space. That is, the employed machine-readable language must satisfy specific structural characteristics, such that the relevant properties can be reliably computed from any of the entity’s machine-readable descriptions. We summarize this observation in terms of the following fundamental problem statement, which we aim to elaborate on throughout this article.
|
Given an application that requires the processing of analog information, find a sufficient way to represent the information on the chosen hardware platform.
|
The problem statement refers to general hardware platforms. As previously indicated, future virtual-twinning applications will not necessarily be limited to digital technology, c.f. [
4]. However, in the scope of this article, we will only discuss traditional digital computing. Hence, in the problem statement, we may replace “the chosen hardware platform” with “digital hardware” in the context of the subsequent sections.
So far, our discussion on the fundamental problem statement and the associated concepts has been abstract, without a clear picture of how they translate to actual engineering problems. Throughout the subsequent sections, we aim to draw a precise picture of machine-readable languages, relevant properties, and proper representations for signal-processing and communications-engineering applications that involve traditional SSI. Aside from the conceptual similarities between digital twinning and SSI we discussed above, SSI has relevant direct applications in digital twinning. In the context of general virtual twinning, ref. [
10] discussed an actual implementation of such an application, c.f.
Figure 1.
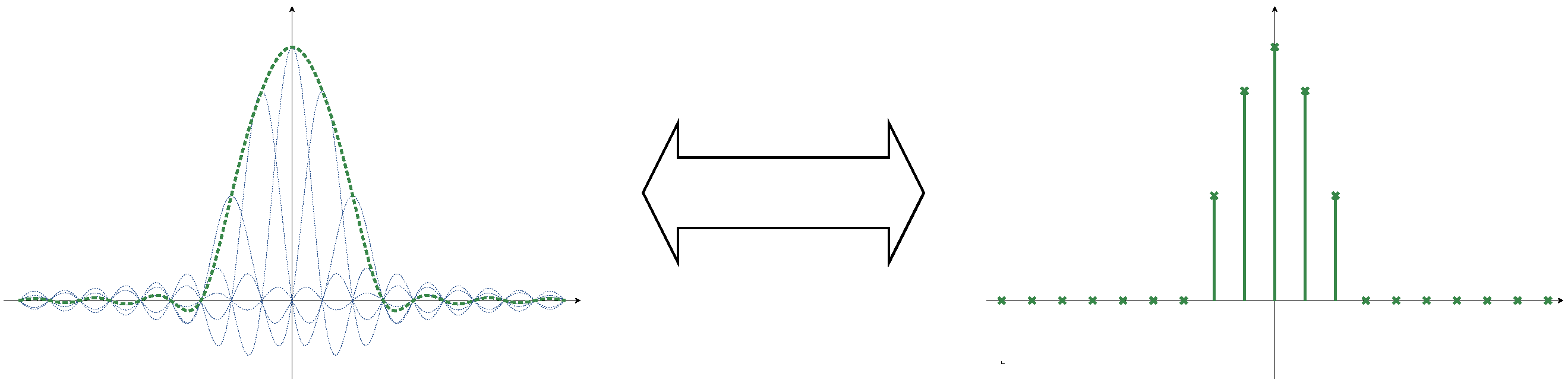
Recall that traditional SSI aims at restoring the physical entity (i.e., a bandlimited signal) entirely. The relevant analytic result is known as (generalized) Plancherel–Pólya Theorem, c.f.
Section 2 and
Figure 2: The bandlimited signal uniquely determines the corresponding sequence of samples, and vice versa.
Accordingly, we expect that any property of the bandlimited signal should be recoverable from the sequence of sampling values. At this point, Turing’s theory of digital computing enters the stage: A priori, the (generalized) Plancherel–Pólya Theorem is a purely analytic result. For it to hold on the algorithmic level, effectiveness in the sense of computable analysis is required. In this context, we will analyze two machine-readable languages emerging from the (generalized) Plancherel–Pólya Theorem for their structural properties. We employ the theory of Turing machines and effective analysis, classifying our results in terms of digital twinning and the article’s fundamental problem statement. Particularly, we provide formal definitions of the terms machine-readable languages and machine-readable descriptions, and discuss formal examples of relevant properties. After the mathematical part of the article, we provide a brief subsumption and interpretation of our results, together with some prospects of how they affect near-future digital information-processing technology.
The remainder of the article is structured as follows. In
Section 2, we provide some mathematical background on SSI, introducing the signal spaces
and
, and formally establishing the (generalized) Plancherel–Pólya Theorem in terms of the Banach-space operators
and
. Applying the theory of Turing computability and effective analysis, we continue to develop a framework of machine-readable languages for
and
. This framework formalizes the traditional theory of digital signal processing for communications engineering based on a mathematically rigorous notion of computability. Particularly, we define the machine-readable languages
and
, which mirror the implicit quasi-standard in digital signal processing, and the machine-readable languages
and
, which take the relevant signal’s continuous-time behavior into account. In
Section 3, we provide (for didactic purposes) a mathematical model of digital-twinning systems such as the one shown in
Figure 1, marking the Banach-space norms
and
as a relevant property of signals
,
, respectively. Guided by the exemplary application case, we establish our main results: The (generalized) Plancherel–Pólya Theorem does
not hold true on the algorithmic level. Depending on which of the established machine-readable languages we choose, we either can or cannot compute
,
, respectively, despite all languages determining the relevant signals uniquely in the (analytic) sense of the (generalized) Plancherel–Pólya Theorem. Finally,
Section 4 discusses several other signal properties our theory can analyze and closes the article by interpreting our results as indicated above.
2. Materials and Methods
In the following, we provide a concise introduction to the mathematics of sampling and interpolation, which are primarily based on the theory of Banach spaces and linear operators. To this end, we introduce the Banach spaces
and
,
,
. Commonly,
and
are referred to as Bernstein spaces. For a comprehensive introduction, we refer the reader to [
11,
12].
By
, we denote the set of all complex-valued sequences indexed by
that vanish at infinity. That is, we have
for all
. Equipped with the uniform norm
the set
becomes a Banach space. Further, by
,
, we denote the Banach space of
pth-power-summable sequences with the
p-norm
A function is called entire if it is well-defined and holomorphic on all of . For entire functions that are (essentially) bounded on the real line, we define the essential-supremum norm . The space consists of all entire functions that satisfy the following conditions:
Equipped with the essential supremum norm, the space
becomes a Banach space. Further, the Banach spaces
,
, consists of all functions in
that are
pth-power integrable on the real line, equipped with the
p-norm
Pure mathematics studies all of the spaces
and
,
,
. In contrast, only the spaces
and
occur frequently throughout signal processing and communications engineering, the arguably most “well-known” ones being
and
. They consist of discrete- and, respectively, bandlimited continuous-time signals with finite energy and form the mathematical basis for the seminal results in SSI, established before the relevant theory was extended to general Bernstein spaces. Fourier analysis provides a bijective isometry between
and
: defining
, we have
for all
, where
denotes the Fourier Transform of
on the real line. Through the definition of the sinc-function,
and the linearity of the Fourier Transform, the isometry provides Shannon’s original sampling theorem for the spaces
and
, we have
Since
is zero outside the interval
,
is called bandlimited with bandwidth
. The spaces
,
, thus correspond to the traditional notion of bandlimited signals. Through the definition of exponential types (Point 2 of the requirements above), this notion is generalized to a significantly larger class of functions. For
arbitrary, the Plancherel–Pólya theorem (Theorem 3, p. 152 in [
11]) provides a nontrivial extension to the Shannon’s sampling theorem.
Theorem 1 (Plancherel–Pólya).
Let . For all sequences , , there exists a unique function , such thatis satisfied. In particular, is the unique solution to the interpolation problem , . Conversely, for all signals , , the sequence belongs to and there exist constants and , independent of , such thatholds true. For the spaces
and
,
, Theorem 1 does
not hold to its full extent. The (generalized) Plancherel–Pólya Theorem, which we will subsequently refer to as generalized Shannon equivalence, provides the following: For all
,
, respectively, and
, we have
if and only if we also have
. Furthermore, interpolation on the basis of sinc-functions provides uniform convergence on all compact subsets of
, i.e., for all
, we have
However, there exist sequences
,
, respectively, such that
no function
,
, respectively, satisfies the interpolation condition
for all
. For
, the Kronecker-delta family
,
, defined by
forms a simple example of such sequences. For an example in
, see (
A2). In other words, the inclusions
and
are proper. For further details regarding the generalized Shannon equivalence, we refer to [
11,
12] (Lecture 21, pp. 155–162; Chapter 6, pp. 48–66).
The results established in the present article hold true for all spaces
,
,
. In particular, the specific choice of
is irrelevant. Therefore, without loss of generality, we will restrict ourselves to the case of
in the following, and denote
Further, most definitions and results hold analogously for both
and
. For the sake of brevity, we will thus employ the symbol ‘★’ as a placeholder that may be (uniformly) replaced by ‘1’ or ‘
∞’ within every appropriate scope (such as a definition, a lemma, a theorem, or a proof), and write
with some abuse of notation.
For notational convenience, we introduce the sampling operator
and its inverse
, which we refer to as interpolation operator. Subsequently, we will formalize the notion of computability for the spaces
and
. Then, the (informal) question of whether the generalized Shannon equivalence holds true on the algorithmic level corresponds to the (formal) question of whether the operators
and
are computable in the chosen machine-readable language, which we will address in
Section 3. Observe that the sampling operator
is bounded and injective. Thus, the interpolation operator
is well-defined on a linear subspace
of
. However,
is unbounded, and the subspace
is
not closed, c.f. (
A1) and (
A4). Therefore, the set
is
not a Banach space itself, which is essential in deriving the main results of our work.
Having established the analytic theory of sampling and interpolation, we will now turn to the formalization of its computable variant. To this end, we provide a concise introduction to the theory of Turing machines [
1],
-recursive functions [
13], and computable analysis [
14,
15,
16,
17]. Although mature topics in the field of computer science, they have not yet received much attention within the signal-processing community.
Turing machines form an abstract mathematical model for digital computing. In fact, the widely accepted Church–Turing Thesis implies that they form a definitive and universal model of digital computing, i.e., any mathematical problem can (in principle) be solved through a real-world digital computer if and only if it can theoretically be solved by a Turing machine. Hence, if a certain algorithmic problem cannot be solved on a Turing machine, it can definitely not be solved on an actual digital hardware. The algorithms a Turing machine can compute is equivalent to the class of
-recursive functions, c.f. [
18] for the proof of equivalence.
By , we denote the set of natural numbers including zero. Throughout this article, it will occasionally be necessary to exclude zero from to obtain a meaningful mathematical expression. As the reader may easily detect such a necessity from the relevant context, we avoid indicating them explicitly by a distinguished notation.
We call a mapping natural-number function if it is of the form
,
, where the symbol “
” denotes partiality. That is, we have
. A partial natural-number function is called total if the inclusion is improper, i.e., if we have
. Then, the set of
-recursive functions
consists of all those natural-number functions that we can construct from the sucessor function, constant functions, and projection functions through application of composition, primitive recursion, and unbounded search (Definition 2.1, p. 8, Definition 2.2, p. 10 in [
14]). By
,
, we denote the set of
-recursive functions in
n arguments, where
can be understood as the set
itself, i.e., constant functions in zero arguments. Accordingly, we have
.
Observe that, generally speaking, -recursive functions are partial. When Turing machines are modeled as actual state-based machines that perform computations in sequential processing steps, the domain of the corresponding -recursive function equals the set of inputs for which the Turing machine halts its computation in finite time. A set is called recursively enumerable if it is either empty or the domain of a -recursive function. Consequently, a set is recursively enumerable if and only if it is either empty or the range of a total -recursive function. Furthermore, if is recursively enumerable, there exists a (total) -recursive function that satisfies the following for all :
There exists a number such that is satisfied if and only if holds true;
If holds true for a number , then holds true for all that satisfy .
We call such a function a runtime function for
. A set
is called recursive if both
and
are recursively enumerable which, in turn, holds true if and only if the indicator function
of
is a (total)
-recursive function.
Alan Turing introduced the concept of computable real numbers in [
1]. Our definition of computable real numbers, and, subsequently, computable complex numbers, is based on computable sequences of rational numbers (p. 14 in [
15]).
Definition 1. A sequence of rational numbers, , is called a computable sequence of rational numbers if there exist (total) μ-recursive functions such thatis satisfied for all . Analogously, for , an n-fold computable sequence of rational numbers is defined through (total) μ-recursive functions in n arguments. Definition 2. A sequence of complex numbers, , is called a computable sequence of rational-complex numbers if there exist a pair of computable sequences of rational numbers such that is satisfied for all . Analogously, for , an n-fold computable sequence of rational-complex numbers is defined through a pair of n-fold computable sequences of rational numbers.
Definition 3. A real number, x, is called computable if there exist a computable sequence of rational numbers and a (total) μ-recursive function such that holds true for all that satisfy . For a triple of this kind, we write . Further, we denote the set of computable real numbers by .
Definition 4. A complex number, z, is called computable if there exist a computable sequence of rational-complex numbers and a (total) μ-recursive function such that holds true for all that satisfy . For a triple of this kind, we write . Further, we denote the set of computable complex numbers by .
In Definitions 3 and 4, the -recursive function provides a computable way to control the approximation error , , , , respectively. In this case, the convergence of and to x and z, respectively, is referred to as effective, and the function is called a corresponding effective modulus of convergence.
In the following, we will extend the established concepts of computability to the spaces
and
. To this end, we analogously write
with the relevant formal definitions following below. Further, we employ an enumeration
of the integers
, defined through
Definition 5. A sequence, , is called computable in if there exist a computable double sequence of rational-complex numbers and a (total) μ-recursive function , such thatis satisfied for all . We denote the set of all such sequences by . Further, if we have for some (c.f. Definition 6), we write for the triple . Definition 6. A function, , is called computable in if there exist a computable double sequence of rational-complex numbers and a (total) μ-recursive function , such thatis satisfied for all . We denote the set of all such functions by . Further, we write for the triple . Observe that, generally speaking, linear combinations of sinc-functions are
not elements of
. However, specific linear combinations of sinc-functions with rational-complex coefficients are, in fact, elements of
, and the set of these linear combinations is dense in
. For details, we refer the reader to Appendix B, p. 6363f in [
19] (upon minor adjustments, the proof presented in the reference holds true for the restricted case of rational-complex coefficients).
A sequence
is called an elementary computable if there exists a rational-complex
-tuple
, such that we have
Analogously, a function is called an elementary computable if there exists an elementary computable sequence such that we have . Hence, elementary computable functions are exactly those functions that we can represented by a finite interpolation series with rational-complex coefficients in the sense of traditional SSI.
For
, a computable double sequence of rational-complex numbers
, and a (total)
-recursive function
, let (
1) be satisfied. Then, for all
, the sequence
is an elementary computable with coefficients
. The sequence of sequences
is called a computable sequence of elementary computable sequences. Further, for all
, we have
. In general, a sequence
is computable in
if and only if there exists a computable sequence of elementary computable sequences
that converges effectively towards
, with respect to
and a suitable effective modulus of convergence.
For
, a computable double sequence of rational-complex numbers
, and a (total)
-recursive function
, let (
2) be satisfied. Analogously, for all
, the function
is an elementary computable with coefficients
. The sequence of functions
is called a computable sequence of elementary computable functions. Further, for all
, we have
. In general, a function
is computable in
if and only if there exists a computable sequence of elementary computable functions
that converges effectively towards
, with respect to
and a suitable effective modulus of convergence.
Throughout the remainder of this article, we will prove the following: There exist
and
as above, such that we have
, despite
converging effectively towards
. In other words, even if
converges effectively towards
, the computable sequence of elementary computable functions
does
not necessarily converge towards
.
Section 3 will discuss the consequences of this observation extensively. To this end, we will now establish two preliminary lemmas, the proofs of which we provide in
Appendix A.
Lemma 1. Let be a recursively enumerable set. There exists a (not
necessarily computable) sequence of elementary computable functions in that satisfies the following: the sequence is a computable sequence of sequences in , and, for all , we have Lemma 2. Let be a recursively enumerable set. There exists a (not
necessarily computable) sequence of elementary computable functions in that satisfies the following: the sequence is a computable sequence of sequences in , and for all , we have For the general definition of computable sequences of abstract objects (such as those used in Lemmas 1 and 2), see below.
Recall this article’s fundamental problem statement from
Section 1: Given an application that requires the processing of analog information, find a sufficient way to represent the information on digital hardware. In order to provide a solution, we require a general formalization of how to represent information on Turing machines, employing the natural numbers as their “atomic” numerical object. The authors advise readers that this formalization is somewhat abstract, but necessary for a mathematically rigorous treatment. After establishing the formalization in its abstract form, we will put it in the context of SSI, allowing for a less cumbersome and more intuitive treatment.
For two -recursive functions , we write if is satisfied, and for all , we have . Furthermore, for ease of notation, we will make use of anonymous mappings. In general, an explicit definition of a mapping is of the form , “”, where and are arbitrary sets, and “” is the term defining G, such as, for example, “”, “”, “”, and so on. If the context determines and without ambiguity, but does not require providing an explicit definition, we simply write “”) to denote the respective mapping.
The formalization of how to represent information on Turing machines builds upon the existence of universal
-recursive functions
, an arbitrary one of which we fix for the remainder of this article. Then, for every
-recursive function
, the following holds true: there exists a “program”
such that the function
, defined through
satisfies
. Accordingly, for all
, the universal
-recursive function
U provides an equivalence relation on
: for
, we have
if
. Evidently, the equivalence-relation’s quotient set
is in one-to-one correspondence with the the set
. We denote
which hints towards the usual notation for quotient sets in the context of equivalence relations: we have
if and only if
. We call the set
a machine-readable language for the set
, and
is a machine-readable description of
. Furthermore, for
, a mapping
is called computable if there exists a
-recursive function
such that, for all
with
, we have
For
, we can extend the principle to analogously mappings of the form
. Observe that arithmetic operations on
-recursive functions, such as
and so on, as well as composition, primitive recursion, and unbounded search (see above), when seen as operations on
-recursive functions, provide computable mappings in the sense of the definition above. Throughout the remainder of the article, we will make implicit use of the computability of mappings of the form
on many occasions. For details, we refer to the SMN-Theorem, c.f. Theorem 3.5, p. 16 in [
14].
Following the principle of
,
, we can now define general machine-readable languages and general computable mappings through an inductive scheme. For all
, the set of
n-tuples of natural numbers,
, is an atomic machine-readable language, and for all
, a mapping
is called atomically computable if there exist functions
such that
is a (possibly improper) subset of
, and we have
for all
. A (
non-atomic) machine-readable language for the (abstract) set
is of the form
where
is a machine-readable language and
is a partial surjective mapping. Further,
is called a machine-readable description of
. Again, “
” hints towards the usual notation for quotient sets: for
, we have
if and only if
, i.e.,
and
are two machine-readable descriptions of the same abstract object. However, since
is generally partial, so is the induced equivalence relation. Finally, mapping
, where
and
are machine-readable languages, is called (
non-atomically) computable if there exists a computable mapping
such that, for all
with
, we have
Unless defined otherwise, a sequence
of elements of
is called computable if there exists a (total) computable mapping
. Observe that if
and
are machine-readable languages for arbitrary abstract sets
and
, respectively,
naturally induces a mapping
according to
and vice versa. If, according to the specific context, there is no danger of ambiguity, we will not distinguish between
and
.
In essence, a machine-readable language is a formal specification of how to represent abstract information on digital hardware, such that we can (in principle) trace this specification down to the level of tuples of natural numbers and fundamental operations thereon. Upon fixing a suitable
-recursive pairing function (Chapter 1.4, p. 12 in [
16]), i.e., a bijective mapping
with
, every machine-readable language
exhibits a canonical numbering, i.e., computable surjective mapping
, defined in an inductive manner:
If
is an atomic machine-readable language, i.e., we have
for some number
, we define
where
denotes the
n-fold successive application of
to
m;
For a
non-atomic machine-readable language
and a general machine-readable language
with canonical numbering
, we define
with
accordingly.
Among other things, and together with the relevant pairing function , the canonical numbering facilitates the definition of machine-readable languages for tuples of the form , provided we have already defined machine-readable languages for the abstract sets and .
Referring to this article’s fundamental problem statement, if we want to represent abstract information on a digital machine in a sufficient way, we need to specify a machine-readable language for the relevant abstract set, and then investigate the language’s structural properties. Albeit rarely explicit, this principle is used throughout the literature of computable analysis. In the context of Banach spaces, it is strongly related to the definitions of computability structures (Chapter 2.1, p. 80ff in [
15]). Further, any canonical numbering
as defined above is essentially a numbering in the sense of a concept that is fundamental in computability theory (Chapter 1.4, p. 12 in [
16]). As indicated before, formal approaches of this form are necessary for a mathematically rigorous theory of computable analysis. Yet, they are somewhat cumbersome in use. In Definition 3, for example, we have implicitly introduced a machine-readable language for the set of computable real numbers by defining the relation
. This convention is an abuse of notation regarding the just-established formalization of machine-readable languages. Strictly speaking, we first have to define machine-readable languages for the set of triples
. Then, we have to define a machine-readable language for the set of computable sequences of rational numbers. Finally, we have to define a machine-readable language for the set of pairs
as above, based on which we can define the machine-readable language for the set of computable real numbers in the sense of Definition 3. Intuitively, on the other hand, it is evident from Definition 3 that we describe a computable real number by a suitable pair
, and we can implement computable mappings on computable real numbers by applying
-recursive functions to the “programs” (with respect to the universal
-recursive function
U) of the underlying quadruple
. Keeping the formal definition in mind, we will, with some abuse of nomenclature and notation, employ the following conventions for mathematical ease:
A standard description of computable real number x consists of a pair that characterizes x in the sense of Definition 3, and we write . We denote the associated standard machine-readable language by ;
A standard description of computable complex number z consists of a pair that characterizes z in the sense of Definition 4, and we write . We denote the associated standard machine-readable language by .
For the set , the same convention applies. However, based on the generalized form of Theorem 1, we have two different machine-readable languages available:
A discrete-time description of consists of a pair that characterizes in the sense of Definition 5, and we write . We denote the associated discrete-time machine-readable language by ;
A continuous-time description of consists of a pair that characterizes in the sense of Definition 6, and we write . We denote the associated continuous-time machine-readable language by .
Returning to the abstract theory of machine-readable language once more, we can consider the general case of an abstract set
with more than one associated machine-readable language: in fact, even though any machine-readable language has necessarily only countably many elements, there exists an uncountable number of machine-readable languages for any nontrivial abstract set. Consider machine-readable languages
and
for the set
, and define the corresponding identity mapping
We can now define a partial quasiorder on the class of machine-readable languages for the set
as follows:
Intuitively, if , we can find an algorithm that transforms any description of any object in the language into a description of the same object in the language . For any computable mapping , where is an arbitrary machine-readable language, the composition is computable as well. Thus, any computational problem we can solve by means of the language , we can also solve by means of the language . In view of this article’s fundamental problem statement, we can distinguish four cases:
If , descriptions in the language contain more information than descriptions in the language ;
If , descriptions in the language contain less information than descriptions in the language ;
If , descriptions in the language contain the same information as descriptions in the language ;
If neither of the previous cases holds, descriptions in the language contain different information than descriptions in the language .
The remainder of this article will address the relationship between the languages
and
. The generalized Shannon equivalence motivates the engineering paradigm that processing any (bandlimited) analog signal can be entirely moved to the discrete-time domain, provided that we have a sequence of sampling values with sufficient quantization accuracy available. However, as stated before, the generalized Shannon equivalence is an abstract analytical concept, formalized in terms of the Banach-space operators
and
. Previously in this section, we have stated that the (informal) question of whether the generalized Shannon equivalence also holds true on the algorithmic level corresponds to the (formal) question of whether the operators
and
are computable (in the machine-readable language under consideration). In
Section 3, we will establish that the computability of
and
is essentially a rephrasing of the relationship between
and
.
Before concluding the present section, observe that we have
. Further, for all
, we have
, and for all
, we have
, implying
for the restrictions
and
of
and
to elements of
. We will briefly return to these inequalities in
Section 3.
3. Results
In the scope of our theory, digital twinning involves an abstract set
and a corresponding machine-readable language
, both of which are results of how the relevant technological system is modeled from an engineering perspective. When the system is operated, it gives rise to a (
not necessarily computable) sequence
of elements of
, which ultimately emerges from a successive measurement process. In each instance
,
should, in one way or another, correspond to the instantaneous state of the physical technological system. The details of this correspondence are, again, a result of modeling. For example, referring to
Figure 1, denote the robot’s instantaneous position at time
by
. Further, denote by
a suitable machine-readable language corresponding to a countable set
of our choice, and define
Then, we might require that for a suitable computable mapping
and some
, we have
for all
. Intuitively, we consider the robot’s instantaneous position a relevant property, and thus want to be able to recover it from the robot’s virtual twin up to a certain error at any instance in time.
Recall that
Figure 1 (Right) illustrates the instantaneous discrete-time impulse response of the transmission channel between the robot and the receiving end. Commonly, wireless transmission channels are assumed linear, i.e., their behavior is determined entirely by the relevant impulse response. Further, wireless communication systems are commonly restricted to a specific frequency range, i.e., the transmission is bandlimited. Accordingly, for all
, the instantaneous physical transmission channel uniquely corresponds to a bandlimited signal
,
. Without loss of generality, we again consider
in the following. For
and
, define
Then, for some
and suitable computable mappings
and
, we might again require
respectively, to hold for all
. Observe that (
4) is a purely analytical relation, describing the requirement that
and
at each time
provide a sufficiently accurate approximation to the instantaneous properties of the physical channel. The “true” sequence
of channel characteristics does
not need to consist of computable components. In the design process of a digital-twin system, such as that shown in
Figure 1, the responsible engineer has to prove—based on mathematical modeling—that, during the system’s operation, the sequence
,
, respectively, will satisfy (
4). Recall that, by definition, both
and
are machine-readable languages for the set
. Hence, according to
Section 2,
and
each induce a mapping
,
, respectively. In the following, we assume
and
to be the same, and we denote
. The system’s design process will then include the choice between implementing
using
—i.e., approximating
through discrete-time descriptions—or using
—i.e., approximating
through continuous-time descriptions—the implications of which we will analyze subsequently.
Motivated by the generalized Shannon equivalence, the textbook approach considers discrete-time descriptions of bandlimited signals. As indicated before, the evident advantage of this paradigm consists of computational “convenience”. In a simplified manner, the standard (abstract) engineering model—that is, without considering questions of computability, yet—for the wireless communication (sub)system from
Figure 1 may look as follows. At time
, the robot aims to transmit one of
messages to the receiving end, for which he employs an encoding scheme
. For reasons of simplicity, we summarize processes such as encoding (in the sense of information theory), channel precoding, modulation, and pulse shaping in this step. Setting
, the signal at the receiving end is of the form
where
is a sequence of additive noise-like disturbances, and
denotes the convolution of
and
. The receiving end then employs a decoding scheme
. Again, for reasons of simplicity, we summarize processes such as demodulation, filtering, and decoding (in the sense of information theory) in this step. Region-based decoding is a common way of implementing
, in which case
is of the form
where
is a list of reference signals and
is a mapping that assigns each reference signal an inferred message.
In the setup depicted in
Figure 1, the choice of the pair
will generally be based on the robot’s digital twin, i.e., (assuming both the receiving end and the robot itself have access to the sequence
), it will be implemented through computable mappings
,
, involving an optimization of some kind. For example, we may aim to choose
and
such that
for all
and all
that satisfy
for some
. Accordingly, upon implementing the communication system, we require
and
. In theory, we can then entirely neglect the analog part of the real system, i.e., the transmission of the signals through the physical (analog) medium, in the design of our signal processing algorithms.
Again, recall that both
and
are machine-readable languages for the set
. In particular, per its definition,
does
not include the entirety of
, which appears unnecessary following the discussion above. In fact, there does not seem to be an obvious reason to consider the space
at all. Assuming we are able to prove that the implementation of our systems satisfies (
4), we even can perform the optimization of
within the discrete-time domain. Upon closer inspection, we find that despite the discussion above, there exists a variety of reasons why we cannot neglect the analog part of the communication system. We will discuss several of them in the following:
As mentioned above, any real implementation of our system will involve a steps of digital-to-analog conversion of the transmission signal . However, any real-world digital-to-analog converter will not be able to synthesize the signal perfectly. More realistically, we will be able to synthesize some signal , that exhibits distortion from effects such as quantization and imperfect filtering. Depending on the application, it may be necessary to compute the signal in the first place, or at least compute the error , in order to ensure the proper transmission of messages.
The generalized Shannon equivalence, which motivates the processing of signals in the digital domain, is applicable as longs as the entirety of the considered system is linear. In practical wireless communications systems,
non-linear distortions are a common issue. In particular, the analog subsystems of both the transmitter and the receiving end have to operate within a certain dynamic range, which sets an upper limit to the
-norm of the analog signals they can process properly. Accordingly, in order to avoid
non-linear distortions, we need to be able to compute or at least upper-bound the values
and
The details of this issue are investigated in the context of bounded-input-bounded-output (BIBO) stability analysis and the peak-to-average power ratio (PAPR) problem.
Analogous to the situation at the transmitter, we will not be able to measure the signal perfectly at the receiving end. Due to finite quantization accuracy and imperfect filtering, we obtain an approximate signal . Since the overall duration of sampling is finite, we can assume and are elementary computable. Choosing , and denoting , we generally have . Aside from computational convenience, there is no a priori reason to perform decoding based on and rather than and . In view of the mentioned limitations of real-world systems, this observation becomes even more relevant: since effects such as quantization are generally non-linear, information may actually be lost if the decoding is performed in the space rather than . Unless proven otherwise for a specific case, the same argument holds true when we consider decoding schemes other than region-based ones.
From a model-based perspective, taking imperfect sampling at the receiving end into account raises another issue when considering the entire system within
. As indicated above, we may want to design the system with a specified margin-of-error, i.e., we want to guarantee that proper message transmission is possible as long as we have
. If we instead require
, we can provide the continuous-time-domain upper bound
for the reconstruction error, which can then be transferred to the discrete-time domain. Requiring
alone is insufficient, since
may be arbitrarily large in this case nevertheless. Thus, we can provide an estimate for the reconstruction error only if we consider the continuous-time domain of the system.
Consequently, we consider signals
,
,
,
,
, and a communications system of the form
in the following. Observe that we do not aim at actually implementing signal processing in the analog domain. We merely aim at finding find proper digital representatives for the continuous-time signals
,
,
,
,
, since only considering their discrete-time counterparts is insufficient for the reasons we mentioned above. Nevertheless,
is, in principle, a valid way to represent
,
,
,
,
, as follows from the generalized Shannon equivalence: for each
, there exists exactly one
such that
holds true, leaving us with the decision of whether to implement the signal processing for
,
,
based on
and
or
and
.
From
Section 2, recall the inequalities
and
. Hence, if possible, it may be beneficial to implement the signal processing for all of the signals
,
based on
or
as well, since we can always recover corresponding signal descriptions in
, respectively, if needed. On the other hand, depending on the specific application, we may have to choose
,
, in which case we necessarily have to resort to using either
or
. However, in any of the above cases, we must first and foremost be able to compute the relevant norms of the involved signals to implement the communication system. Before mathematical analysis, we summarize the relevant requirements as follows:
|
In a communication system of the form (5) and (6), we consider , , , , , and relevant properties for all , , . Thus, regarding any sufficient representation of signals on digital hardware, we require to be able to recover . In other words, the mapping has to be computable in the employed machine-readable language.
|
Theorem 2. The mapping is computable.
Proof. Observe that for
elementary computable, the mapping
is computable. That is, for
and a rational-complex
-tuple
,
, there exists a computable mapping
, such that
holds true (provided the relevant norm exists). For
arbitrary, let the computable sequence
of elementary computable sequences satisfy (
3). Further, for
, define
Then,
is a computable sequence of rational numbers. Employing the triangle inequality, we obtain
Thus, defining
, we have
. Further, it follows from the SMN-Theorem (c.f.
Section 2) that the mapping
(with
and
as above) is computable, which concludes the proof. □
Theorem 3. The mapping is not computable.
Proof. The statement follows by contradiction from Lemmas 1 and 2, respectively. To this end, assume the mapping
is computable and let
be a sequence that satisfies Lemma 1, Lemma 2, respectively, for some recursively enumerable
nonrecursive set
. Then, there exists a computable mapping
such that for all
, the pair
determines
in the sense of Definition 5, and we have
If the mapping
is indeed computable, there must also exist a computable mapping
,
such that, for all
, we have
By concatenation, we conclude that
,
is computable as well. For all
, we define
Then,
is a rational number, and the mapping
,
, is computable. For all
, we further have
by construction, and thus,
by the requirements of Lemma 1, Lemma 2, respectively. We define
and observe that, we have
. By the SMN-Theorem (c.f.
Section 2),
is computable, i.e.,
g is a
-recursive function. Accordingly,
is recursive, which contradicts the prerequisite of
being
nonrecursive. □
Theorem 4. We have . In the sense of Section 2, the inequality is strict. Proof. Denote by
and
the relevant identity mappings in the sense of
Section 2. That is, we have
for all
. We divide the proof in two parts: first, we prove that
is
not computable; second, we prove that
is computable.
In essence, the first part is a corollary of Theorems 2 and 3, which follows by contradiction. Assume
is computable. By Theorem 2, the mapping
,
, is computable. Hence, by concatenation, we obtain the computable mapping
contradicting Theorem 3. Thus,
cannot be computable.
The second part is a consequence of the continuity of the sampling operator
. Particularly, there exist constants
such that
holds true for all
. Let
be arbitrary. For all
, we have
Define
,
, and
, and observe that
is a computable double sequence of rational-complex numbers and
is a
-recursive function. For all
, we have
Thus, the pair
determines
in the sense of Definition 5, and we have
. Further, by the SMN-Theorem (c.f.
Section 2), the mapping
is computable, which concludes the proof. □
For the languages
and
, Theorem 4 corresponds to the Case 1 of the distinction made in
Section 2: descriptions in the language
contain more information than descriptions in the language
. In
Section 2, we also indicated a link between the relationship of
and
, i.e., the inequality
, and the computability of the operators
and
. In turn, whether
and
are computable is the formal rephrasing of whether the generalized Shannon equivalence holds true on the algorithmic level. Consider the set
i.e.,
consists of those sequences
that equate to some computable signal
under the action of
. Naturally, we can define a machine-readable language
for
according to
in which case the identity mappings (in the sense of
Section 2)
and
become the interpolation operator
and sampling operator
, respectively. Then, according to Theorem 4,
is computable, while
is
not. As indicated in
Section 2, this is due to the discontinuity of
with regard to the relevant norm. In other words, the generalized Shannon equivalence between
and
does
not hold true on an algorithmic level! Analytically, if
holds true, both
and
uniquely determine all mathematically well-defined properties of
, including
. Algorithmically, as Theorems 2–4 show, this is
not the case. With respect to the requirements summarized above, we conclude our analysis as follows:
The generalized Shannon equivalence between and does not hold true on an algorithmic level. In particular, we observe the following:Regarding as relevant property, discrete-time descriptions of signals are an insufficient representative of analog information on digital hardware; Regarding as relevant property, continuous-time descriptions of signals are a sufficient representative of analog information on digital hardware; Any computation on the basis of discrete-time descriptions can be processed on the basis of continuous-time descriptions as well, i.e., continuous-time descriptions capture more information (in the sense of the distinction made in Section 2) than discrete-time descriptions.
|






{kind=link}
{kind=link}

