
Constant-Beamwidth LCMV Beamformer with Rectangular Arrays



Abstract
:1. Introduction
2. Signal and Array Model
Beamformer Metrics
3. Conventional Beamformers
3.1. LCMV Beamformer
3.2. CB Beamformer
3.3. SD and DS Beamformers
3.4. Kronecker Product Beamforming
4. Constant-Beamwidth LCMV Beamformer with Rectangular Arrays
4.1. Rectangular Convolutional Kronecker Product Beamforming
4.2. CB-LCMV Beamformer with RCKP
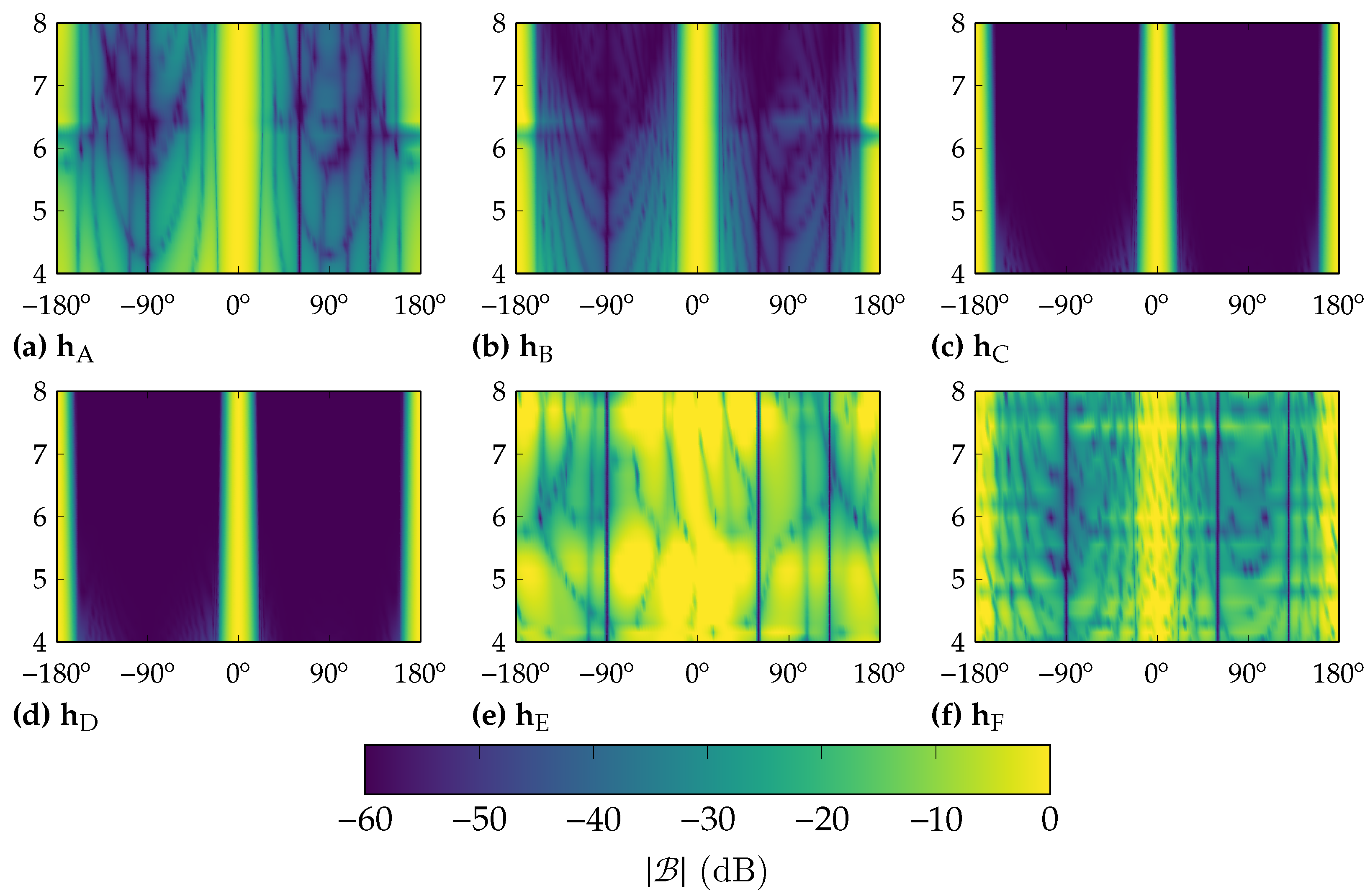
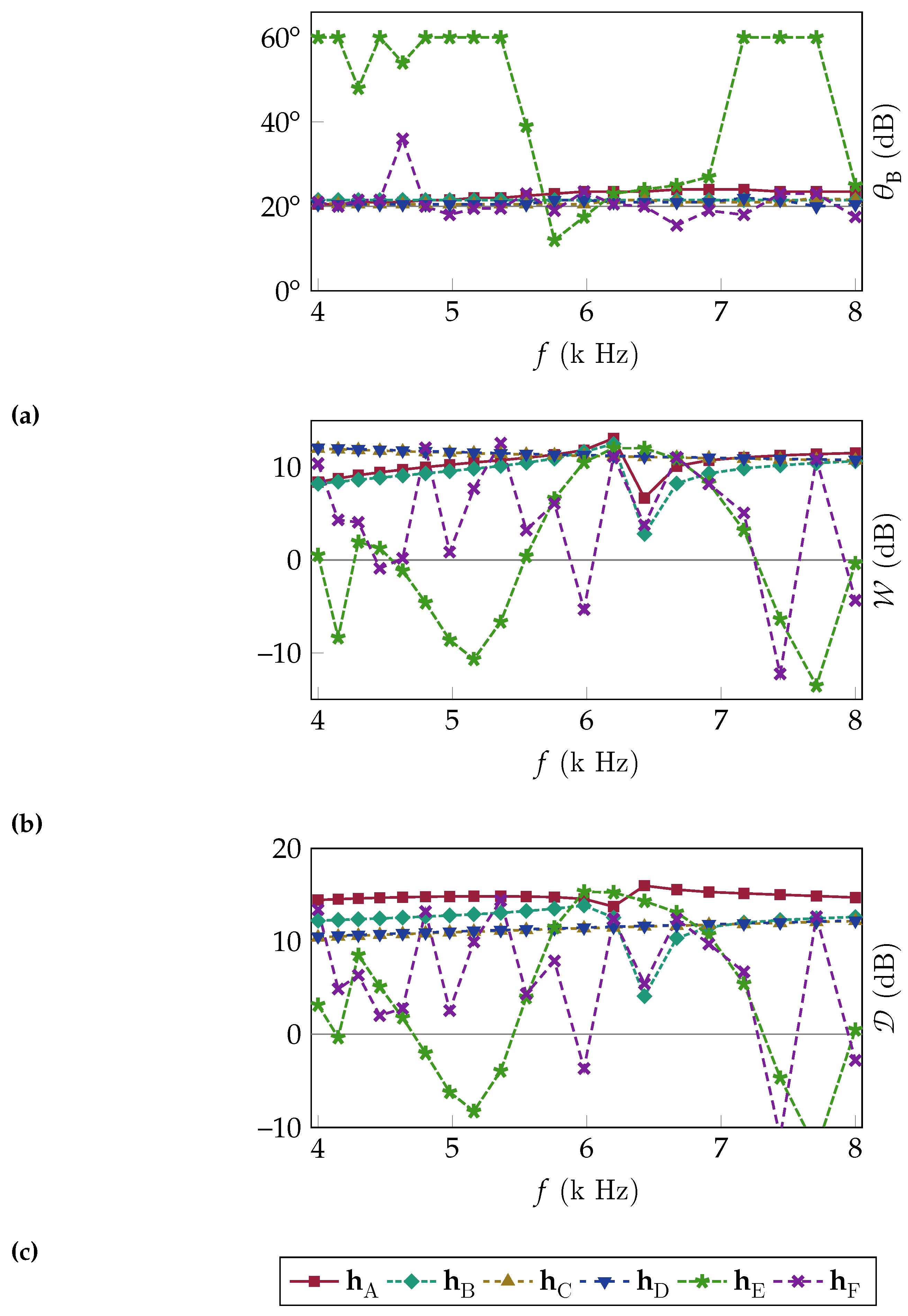
5. Experimental Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| CB | Constant beamwidth |
| CKP | Convolutional KP |
| DF | Directivity factor |
| DS | Delay and sum |
| DSDI | Desired signal distortion index |
| FNBW | First-null beamwidth |
| KP | Kronecker product |
| LCKP | Linear CKP |
| LCMV | Linearly constrained minimum variance |
| MVDR | Minimum variance distortionless response |
| RCKP | Rectangular CKP |
| SD | Superdirective |
| ULA | Uniform linear array |
| URA | Uniform rectangular array |
| WNG | White noise gain |
Appendix A. Proof of CKP Beamforming for URAs
Appendix B. Pseudocode Algorithms
| Algorithm A1 RCKP beamforming algorithm |
 |
| Algorithm A2 CB-LCMV beamformer algorithm |
 |
References
- Viswanath, P.; Tse, D.; Laroia, R. Opportunistic beamforming using dumb antennas. IEEE Trans. Inf. Theory 2002, 48, 1277–1294. [Google Scholar] [CrossRef] [Green Version]
- Herbordt, W.; Nakamura, S.; Kellermann, W. Joint Optimization of LCMV Beamforming and Acoustic Echo Cancellation for Automatic Speech Recognition. In Proceedings of the (ICASSP ’05), IEEE International Conference on Acoustics, Speech, and Signal Processing, Philadelphia, PA, USA, 23–23 March 2005; Volume 3, pp. 77–80. [Google Scholar] [CrossRef]
- Chiariotti, P.; Martarelli, M.; Castellini, P. Acoustic beamforming for noise source localization—Reviews, methodology and applications. Mech. Syst. Signal Process. 2019, 120, 422–448. [Google Scholar] [CrossRef]
- Haykin, S.; Liu, K.J.R. Handbook on Array Processing and Sensor Networks; Wiley-IEEE Press: New York, NY, USA, 2009. [Google Scholar]
- Van Veen, B.; Buckley, K. Beamforming: A versatile approach to spatial filtering. IEEE ASSP Mag. 1988, 5, 4–24. [Google Scholar] [CrossRef] [PubMed]
- Liu, W.; Weiss, S. Wideband Beamforming Concepts and Techniques; Wiley: New York, NY, USA, 2010. [Google Scholar]
- Huang, Q.; Lin, M.; Wang, J.B.; Tsiftsis, T.A.; Wang, J. Energy Efficient Beamforming Schemes for Satellite-Aerial-Terrestrial Networks. IEEE Trans. Commun. 2020, 68, 3863–3875. [Google Scholar] [CrossRef]
- Elbir, A.M.; Mishra, K.V.; Vorobyov, S.A.; Heath, R.W. Twenty-Five Years of Advances in Beamforming: From convex and nonconvex optimization to learning techniques. IEEE Signal Process. Mag. 2023, 40, 118–131. [Google Scholar] [CrossRef]
- Gu, P.; Wang, G.; Fan, Z.; Chen, R. An Efficient Approach for the Synthesis of Large Sparse Planar Array. IEEE Trans. Antennas Propag. 2019, 67, 7320–7330. [Google Scholar] [CrossRef]
- Zhang, X.; Zheng, W.; Chen, W.; Shi, Z. Two-dimensional DOA estimation for generalized coprime planar arrays: A fast-convergence trilinear decomposition approach. Multidimens. Syst. Signal Process. 2019, 30, 239–256. [Google Scholar] [CrossRef]
- Lin, Z.; Lin, M.; Champagne, B.; Zhu, W.P.; Al-Dhahir, N. Secrecy-Energy Efficient Hybrid Beamforming for Satellite-Terrestrial Integrated Networks. IEEE Trans. Commun. 2021, 69, 6345–6360. [Google Scholar] [CrossRef]
- Heidenreich, P.; Zoubir, A.M.; Rubsamen, M. Joint 2-D DOA Estimation and Phase Calibration for Uniform Rectangular Arrays. IEEE Trans. Signal Process. 2012, 60, 4683–4693. [Google Scholar] [CrossRef]
- Ioannides, P.; Balanis, C. Uniform circular and rectangular arrays for adaptive beamforming applications. IEEE Antennas Wirel. Propag. Lett. 2005, 4, 351–354. [Google Scholar] [CrossRef]
- Singh, S. Minimal Redundancy Linear Array and Uniform Linear Arrays Beamforming Applications in 5G Smart Devices. Emerg. Sci. J. 2021, 4, 70–84. [Google Scholar] [CrossRef]
- Goodwin, M.; Elko, G. Constant beamwidth beamforming. In Proceedings of the IEEE International Conference on Acoustics Speech and Signal Processing, Minneapolis, MN, USA, 27–30 April 1993; Volume 1, pp. 169–172. [Google Scholar] [CrossRef]
- Zarifi, K.; Affes, S.; Ghrayeb, A. Collaborative Null-Steering Beamforming for Uniformly Distributed Wireless Sensor Networks. IEEE Trans. Signal Process. 2010, 58, 1889–1903. [Google Scholar] [CrossRef]
- Frost, O. An algorithm for linearly constrained adaptive array processing. Proc. IEEE 1972, 60, 926–935. [Google Scholar] [CrossRef]
- Buckley, K. Spatial/Spectral filtering with linearly constrained minimum variance beamformers. IEEE Trans. Acoust. Speech Signal Process. 1987, 35, 249–266. [Google Scholar] [CrossRef]
- Souden, M.; Benesty, J.; Affes, S. A Study of the LCMV and MVDR Noise Reduction Filters. IEEE Trans. Signal Process. 2010, 58, 4925–4935. [Google Scholar] [CrossRef]
- Hixson, E.L.; Au, K.T. Wide-Bandwidth Constant-Beamwidth Acoustic Array. J. Acoust. Soc. Am. 1970, 48, 117. [Google Scholar] [CrossRef]
- Wang, Z.; Li, J.; Stoica, P.; Nishida, T.; Sheplak, M. Constant-beamwidth and constant-powerwidth wideband robust Capon beamformers for acoustic imaging. J. Acoust. Soc. Am. 2004, 116, 1621–1631. [Google Scholar] [CrossRef]
- Long, T.; Cohen, I.; Berdugo, B.; Yang, Y.; Chen, J. Window-Based Constant Beamwidth Beamformer. Sensors 2019, 19, 2091. [Google Scholar] [CrossRef] [Green Version]
- Frank, A.; Ben-Kish, A.; Cohen, I. Constant-Beamwidth Linearly Constrained Minimum Variance Beamformer. In Proceedings of the 2022 30th European Signal Processing Conference (EUSIPCO), Belgrade, Serbia, 29 August–2 September 2022; pp. 50–54. [Google Scholar] [CrossRef]
- Benesty, J.; Chen, J.; Huang, Y. Microphone Array Signal Processing; Springer Topics in Signal Processing; Springer: Berlin/Heidelberg, Germany, 2008; Volume 1. [Google Scholar] [CrossRef]
- Abramovich, Y.I.; Frazer, G.J.; Johnson, B.A. Iterative Adaptive Kronecker MIMO Radar Beamformer: Description and Convergence Analysis. IEEE Trans. Signal Process. 2010, 58, 3681–3691. [Google Scholar] [CrossRef]
- Werner, K.; Jansson, M.; Stoica, P. On Estimation of Covariance Matrices With Kronecker Product Structure. IEEE Trans. Signal Process. 2008, 56, 478–491. [Google Scholar] [CrossRef]
- Habets, E.A.P.; Gannot, S. Generating sensor signals in isotropic noise fields. J. Acoust. Soc. Am. 2007, 122, 3464–3470. [Google Scholar] [CrossRef] [PubMed]
- Markovich-Golan, S.; Gannot, S.; Kellermann, W. Combined LCMV-TRINICON Beamforming for Separating Multiple Speech Sources in Noisy and Reverberant Environments. IEEE/ACM Trans. Audio Speech Lang. Process. 2017, 25, 320–332. [Google Scholar] [CrossRef]
- Erdogan, H.; Hershey, J.R.; Watanabe, S.; Mandel, M.I.; Roux, J.L. Improved MVDR Beamforming Using Single-Channel Mask Prediction Networks. In Proceedings of the Interspeech 2016, ISCA—17th Annual Conference of the International Speech Communication Association, San Francisco, CA, USA, 8–12 September 2016; pp. 1981–1985. [Google Scholar] [CrossRef] [Green Version]
- Kaiser, J.; Schafer, R. On the use of the I0-sinh window for spectrum analysis. IEEE Trans. Acoust. Speech Signal Process. 1980, 28, 105–107. [Google Scholar] [CrossRef]
- Brandstein, M.; Ward, D.; Lacroix, A.; Venetsanopoulos, A. (Eds.) Microphone Arrays: Signal Processing Techniques and Applications; Digital Signal Processing; Springer: Berlin/Heidelberg, Germany, 2001. [Google Scholar] [CrossRef]
- Huang, G.; Benesty, J.; Chen, J.; Cohen, I. Robust and steerable kronecker product differential beamforming With rectangular microphone arrays. In Proceedings of the ICASSP 2020—2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Barcelona, Spain, 4–8 May 2020; pp. 211–215. [Google Scholar] [CrossRef]
- Hamahata, Y. Arithmetic functions and the Cauchy product. Arch. Math. 2020, 114, 41–50. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
| Cond. | LCMV | SD | DS | CB | FA | |
|---|---|---|---|---|---|---|
| A | 128 | |||||
| B | 68 | |||||
| C | 496 | |||||
| D | 132 | |||||
| E | 48 | |||||
| F | 36 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Curtarelli, V.P.; Cohen, I. Constant-Beamwidth LCMV Beamformer with Rectangular Arrays. Algorithms 2023, 16, 385. https://doi.org/10.3390/a16080385
Curtarelli VP, Cohen I. Constant-Beamwidth LCMV Beamformer with Rectangular Arrays. Algorithms. 2023; 16(8):385. https://doi.org/10.3390/a16080385
Chicago/Turabian StyleCurtarelli, Vitor Probst, and Israel Cohen. 2023. "Constant-Beamwidth LCMV Beamformer with Rectangular Arrays" Algorithms 16, no. 8: 385. https://doi.org/10.3390/a16080385
APA StyleCurtarelli, V. P., & Cohen, I. (2023). Constant-Beamwidth LCMV Beamformer with Rectangular Arrays. Algorithms, 16(8), 385. https://doi.org/10.3390/a16080385