Positioning Methods and the Use of Location and Activity Data in Forests

 ,
,  , ,
, ,
Abstract
:1. Introduction
2. Types of Positioning Technologies
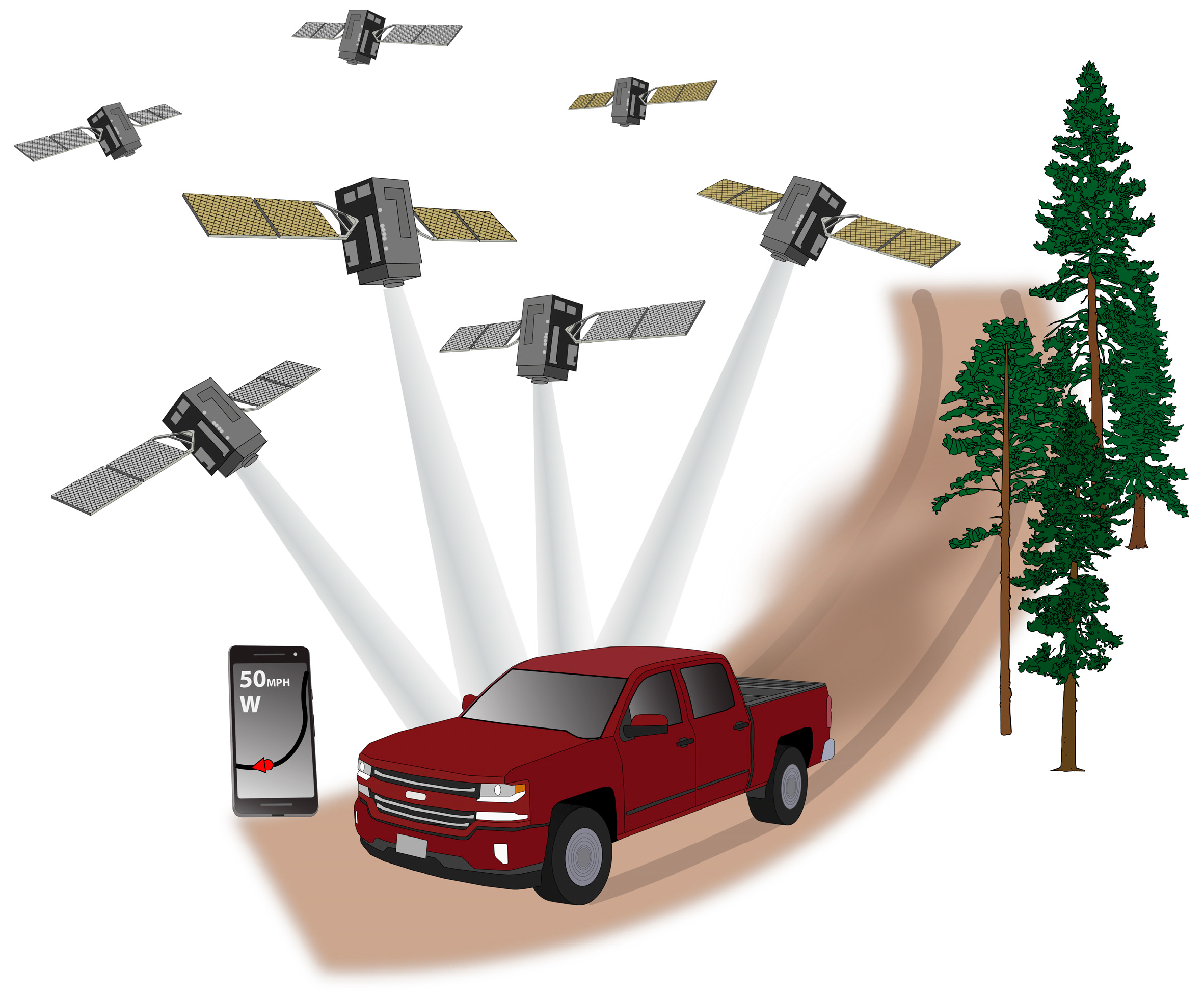
2.1. GNSS – Single, Dedicated Receiver
2.2. GNSS—Smartphone and Tablet-Based Mapping
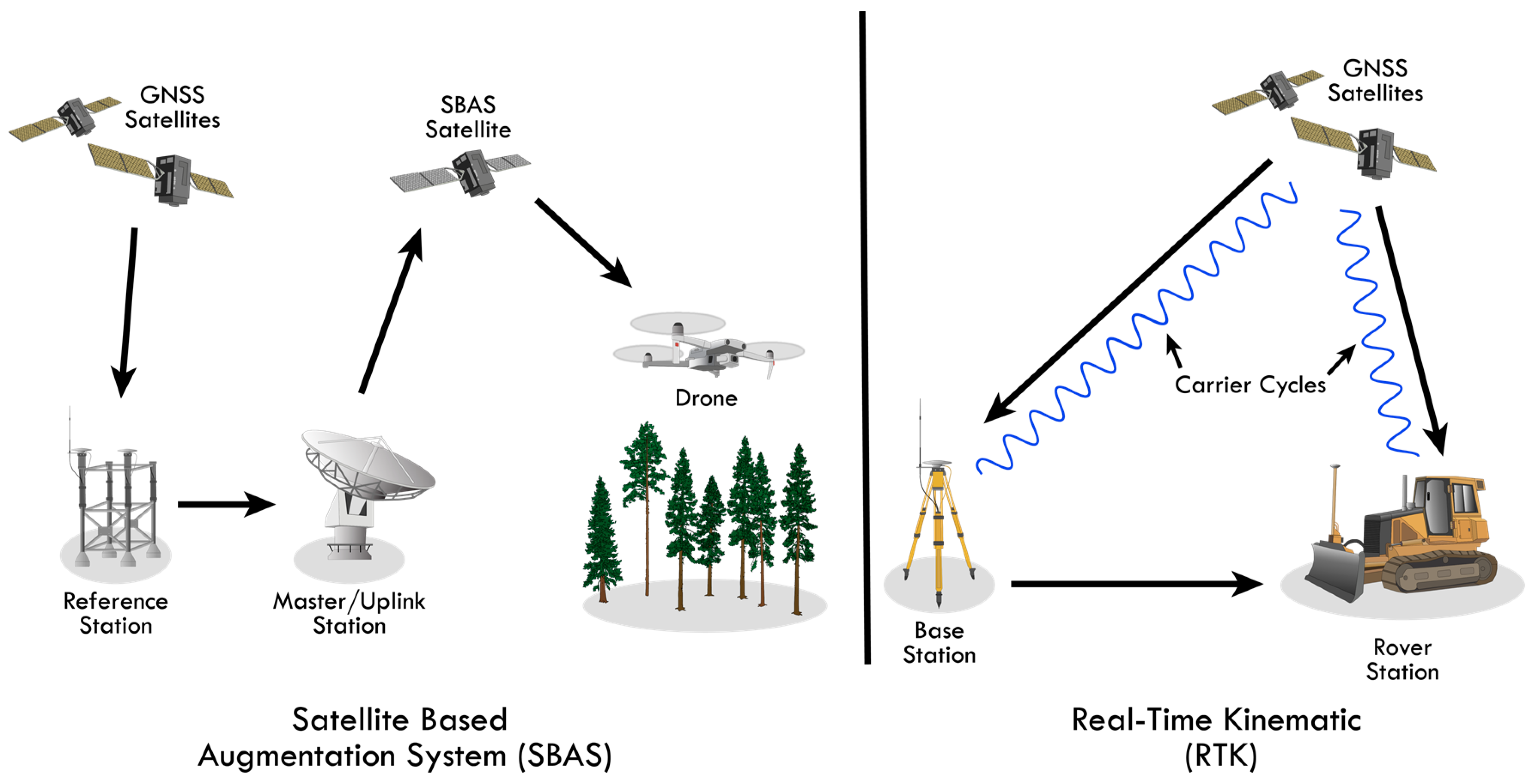
2.3. Augmented GNSS and GNSS with RTK Correction
2.4. GNSS with Two-Way Satellite Communication
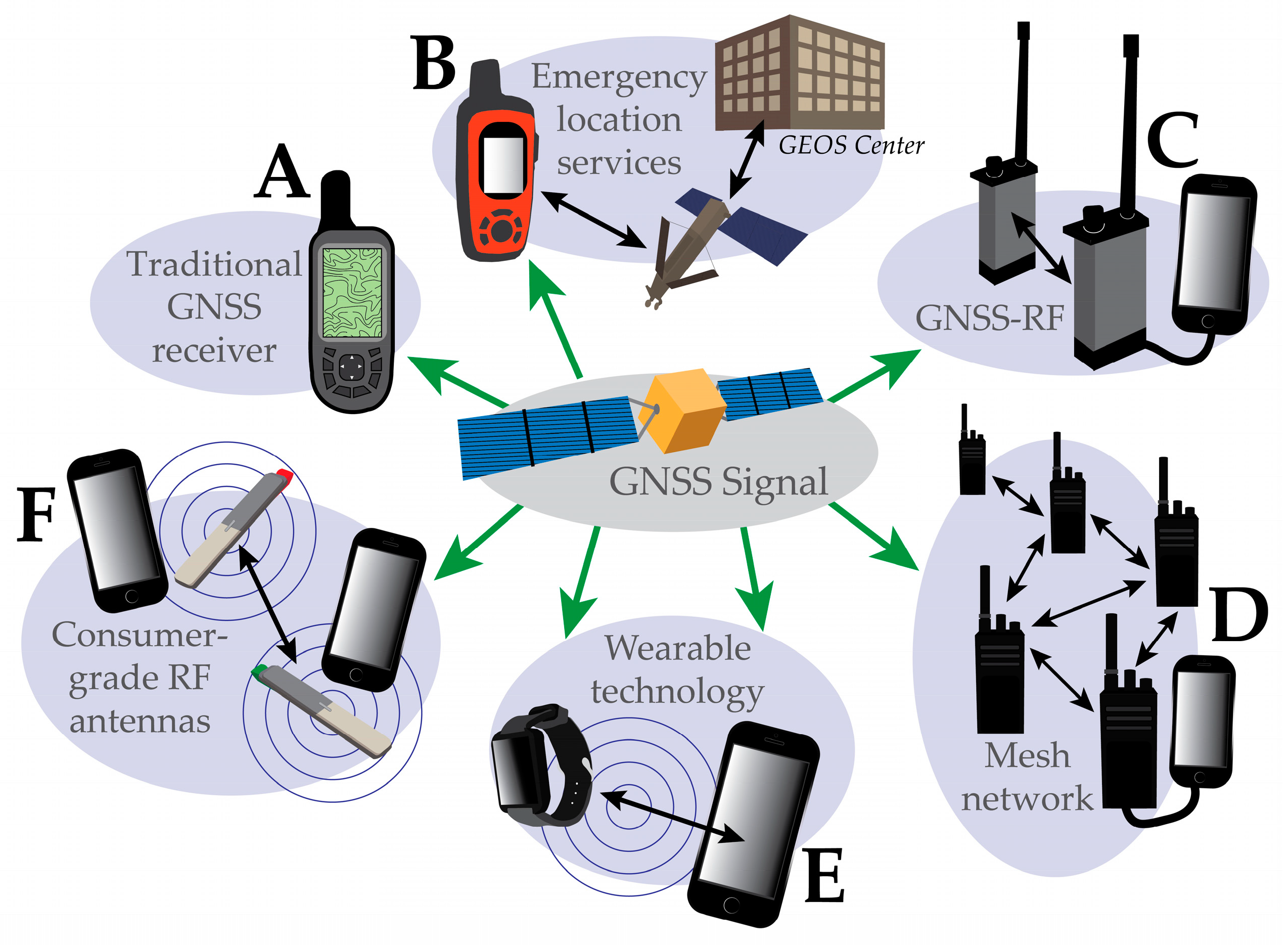
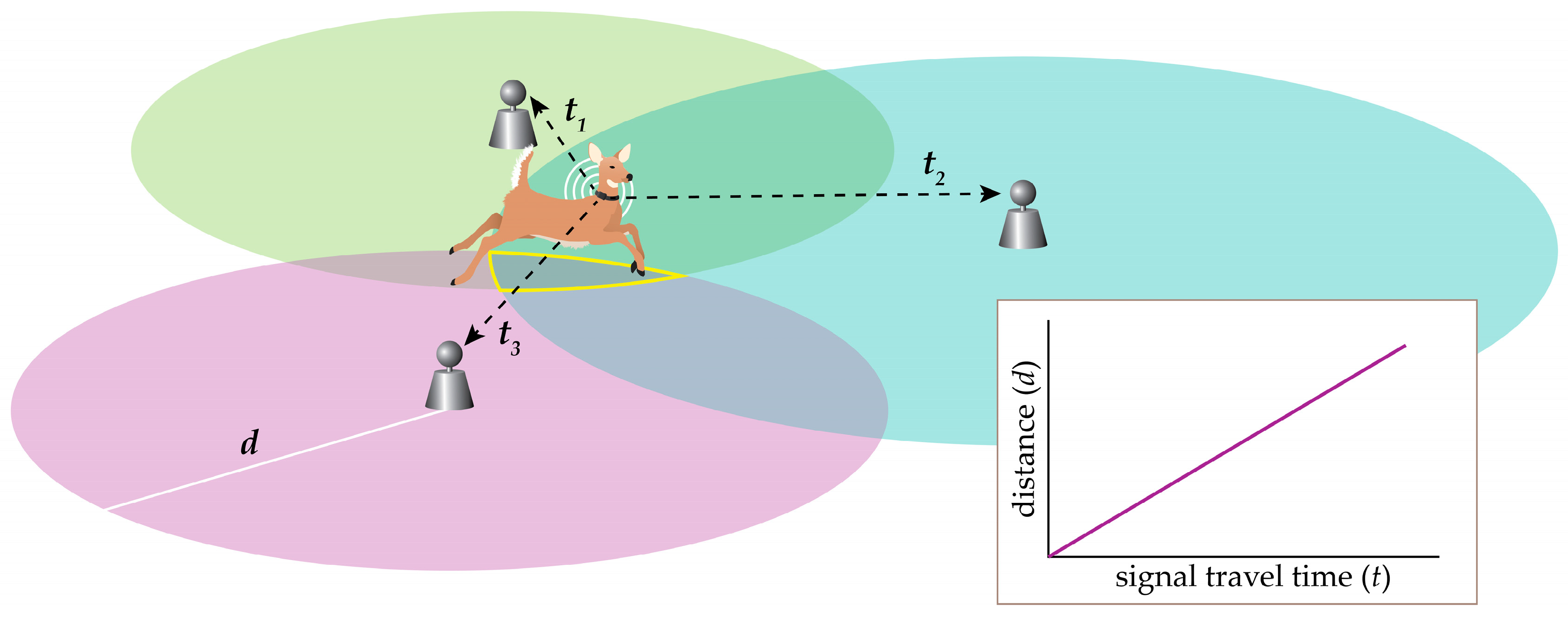
2.5. GNSS-RF
2.6. Ultra Wideband and UHF/VHF Radio Telemetry
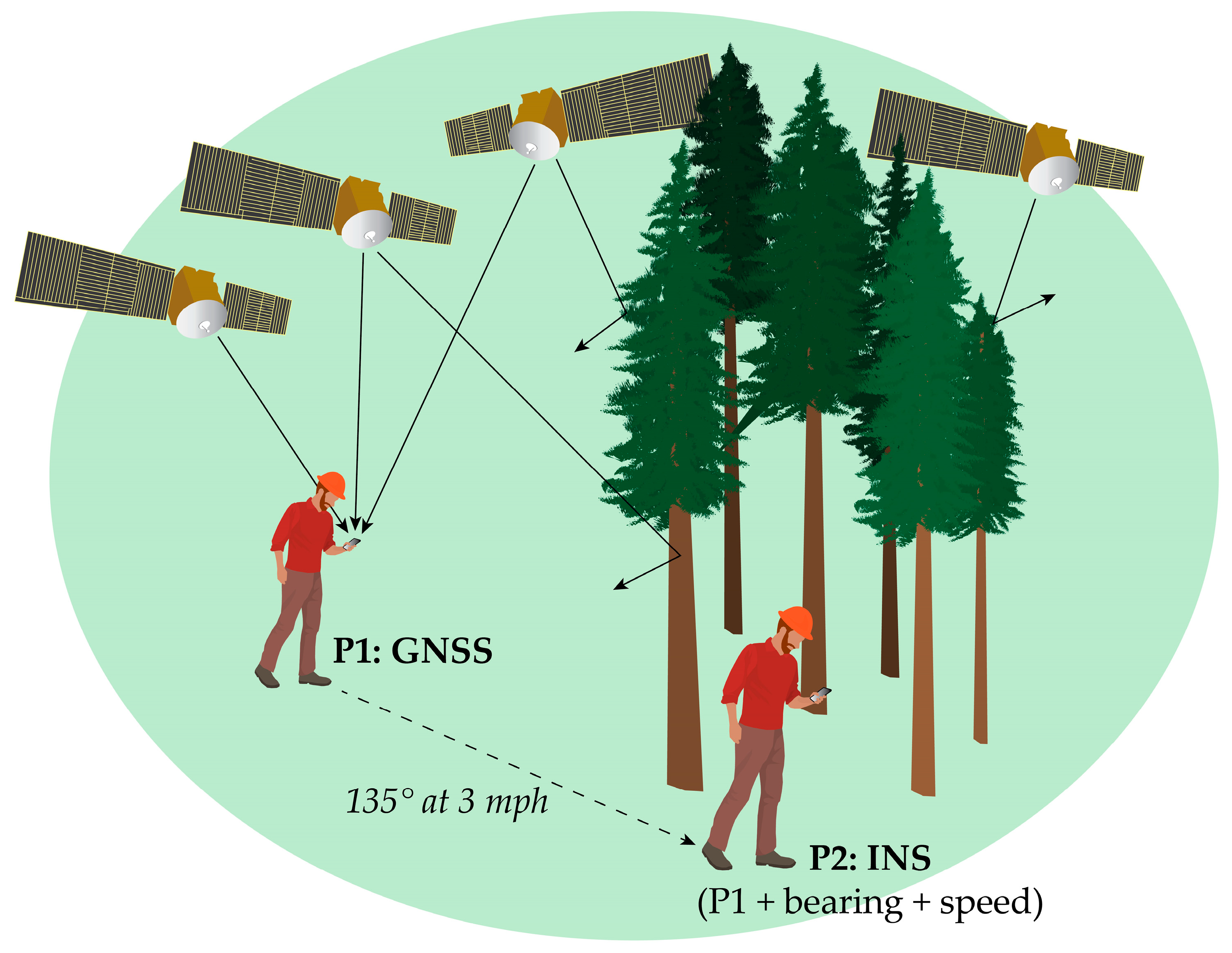
2.7. Inertial Navigation Systems
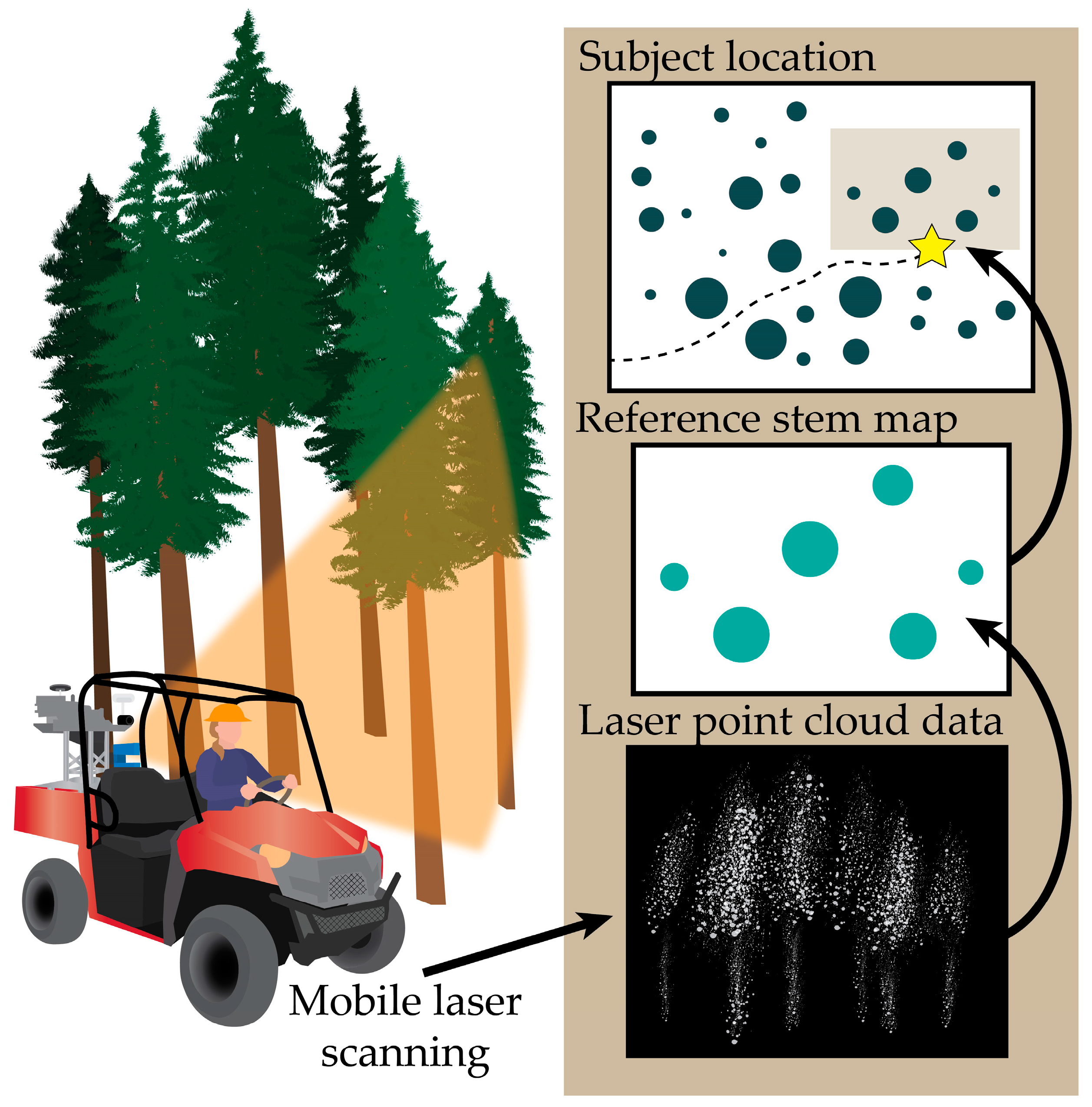
2.8. Simultaneous Localization and Mapping (SLAM)
2.9. Bluetooth, BLE, and ANT
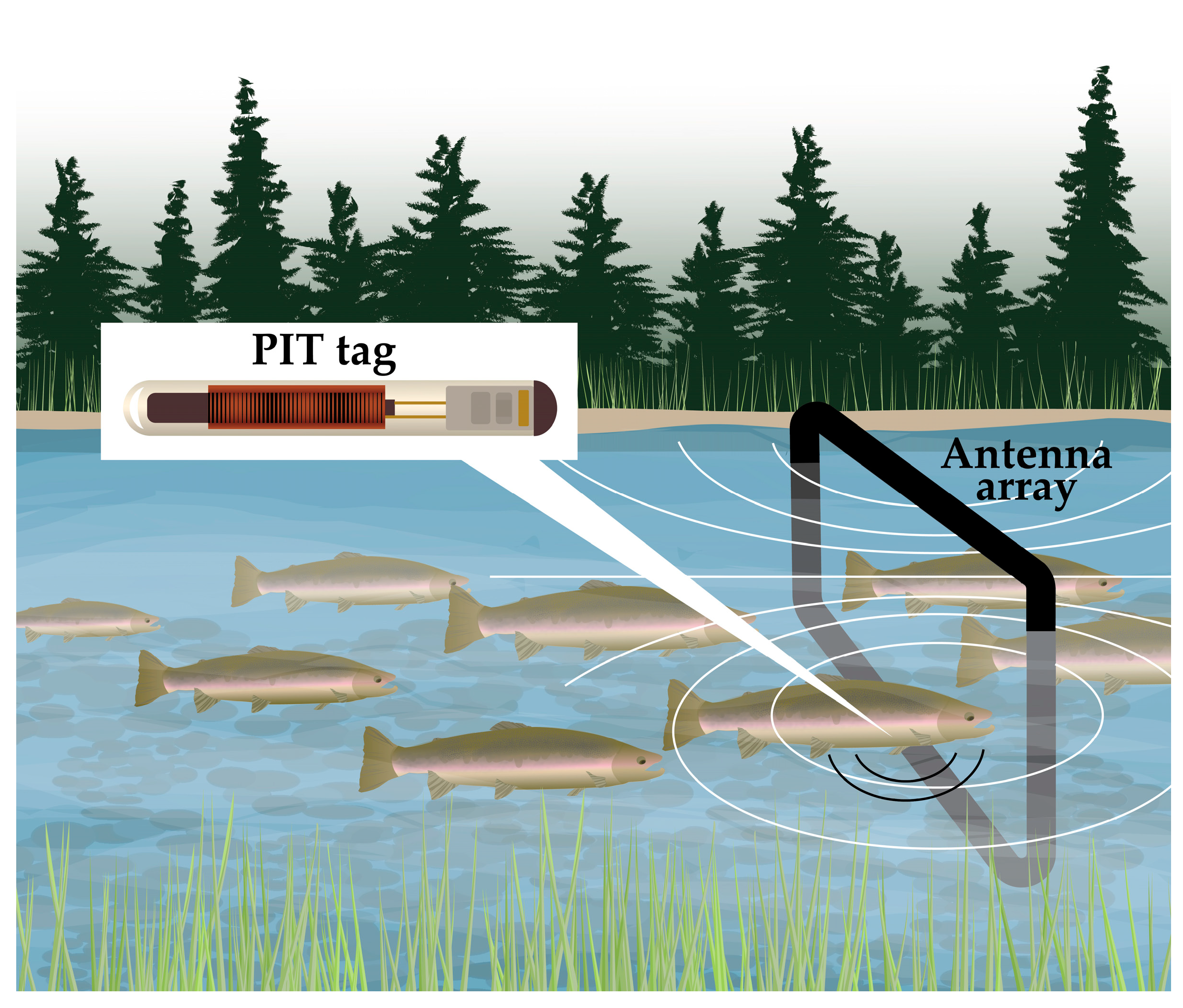
2.10. RFID and Acoustic Positioning
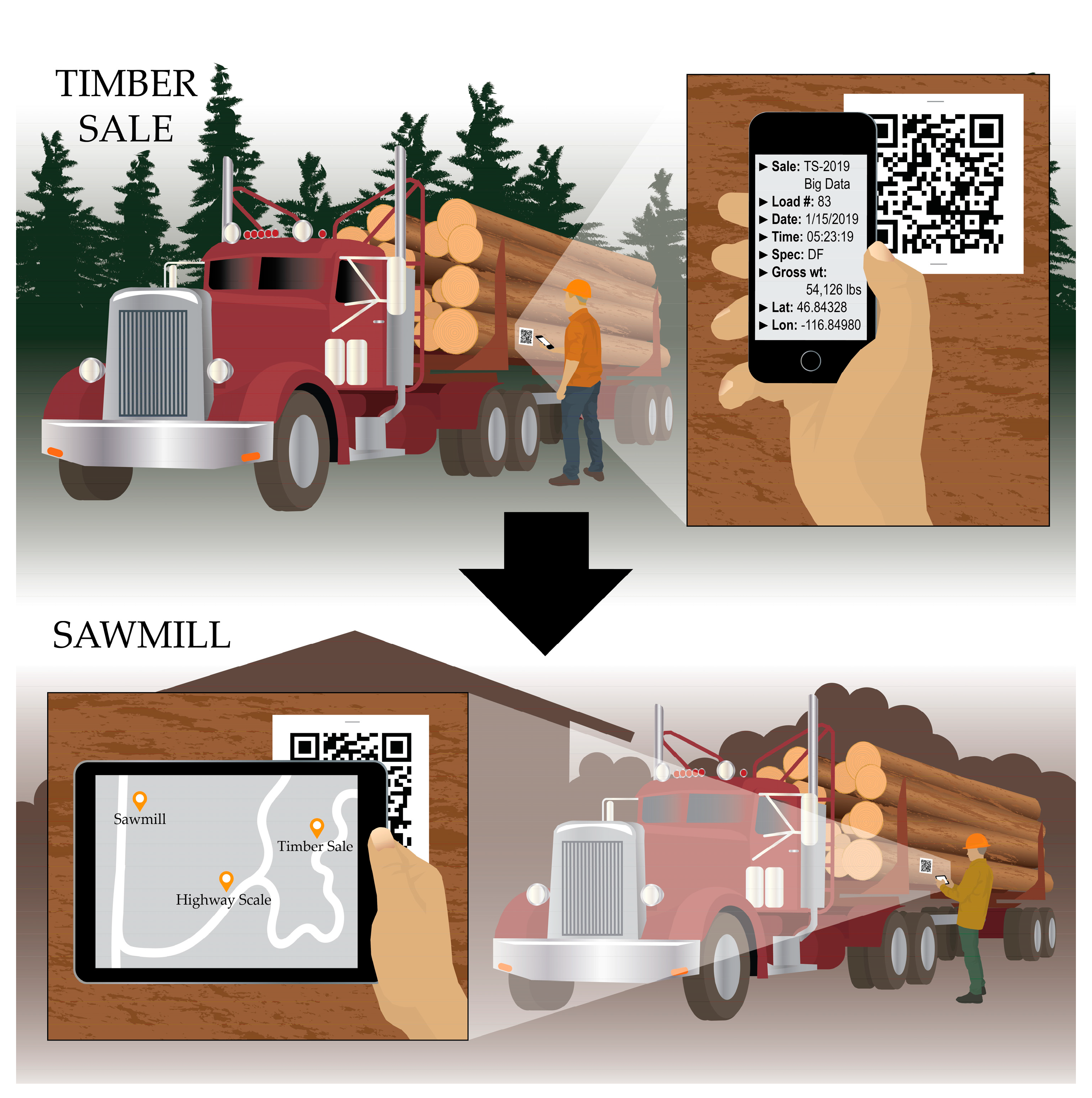
2.11. Barcodes and QR Codes
2.12. Video Object Detection and Relative Positioning Methods
3. Accuracy and Range of Available PNT Technologies
4. Location-Based Services, the Internet of Things, Wearable Technology, and Big Data
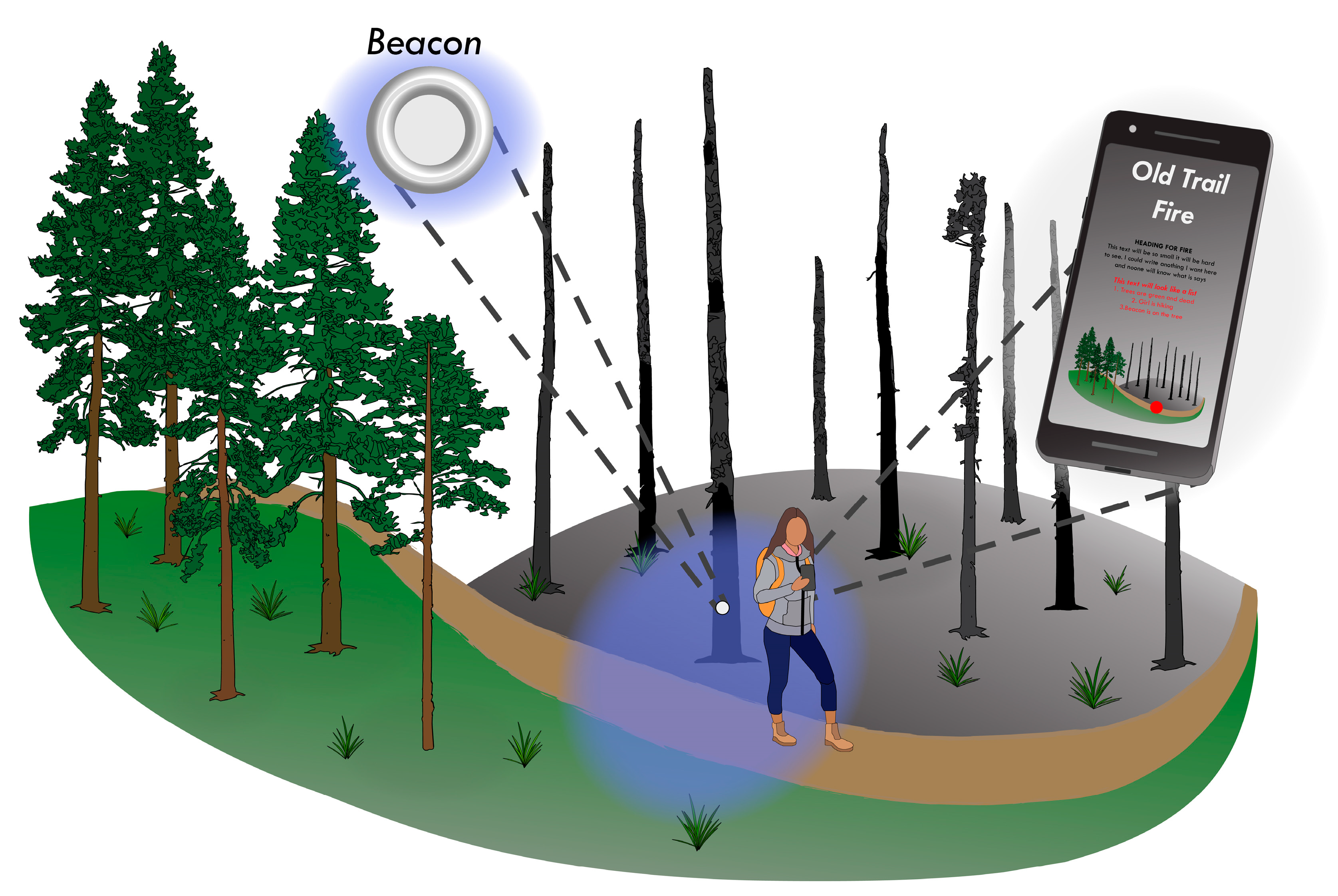
4.1. Location-Based Services
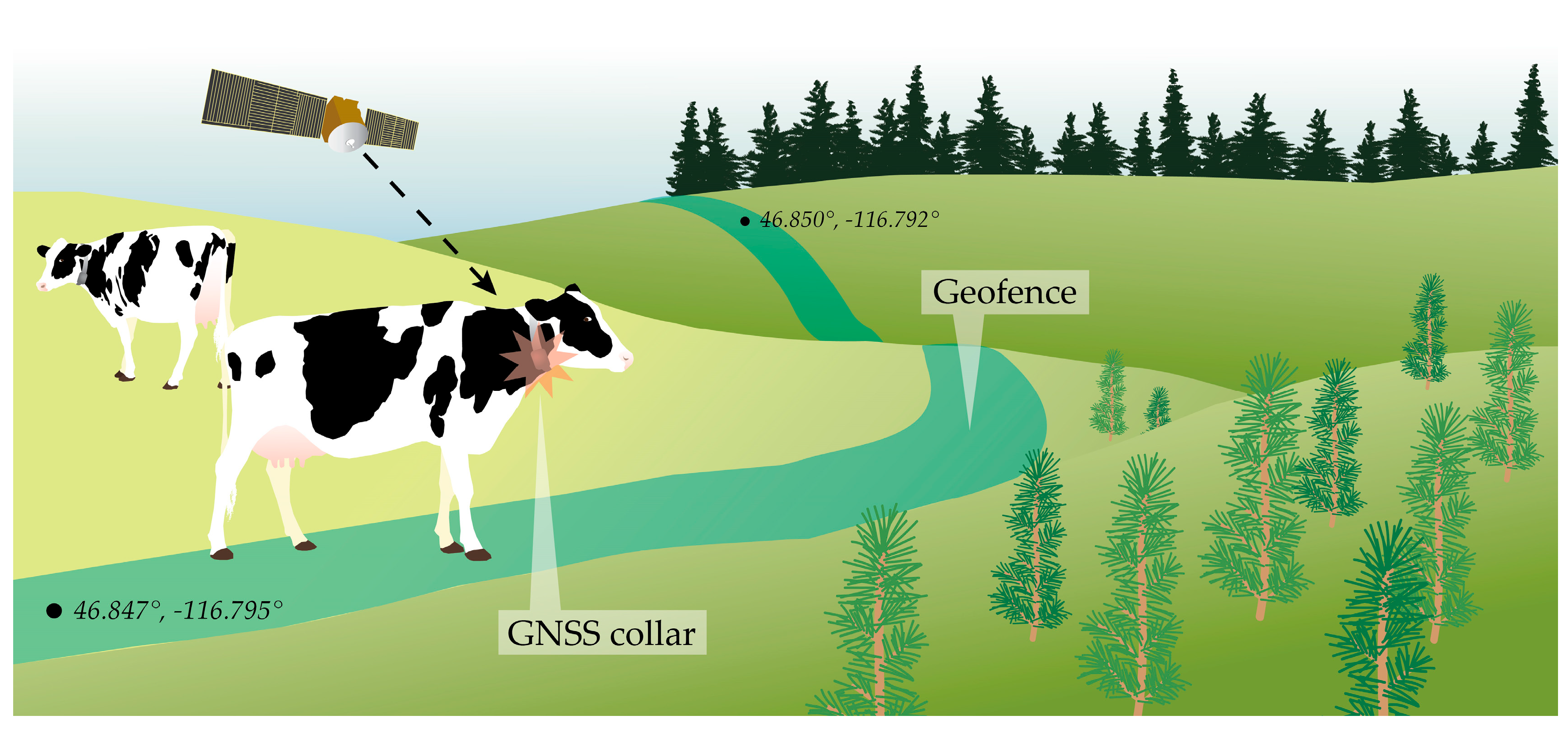
4.2. Geofences
4.3. Wearable Technology
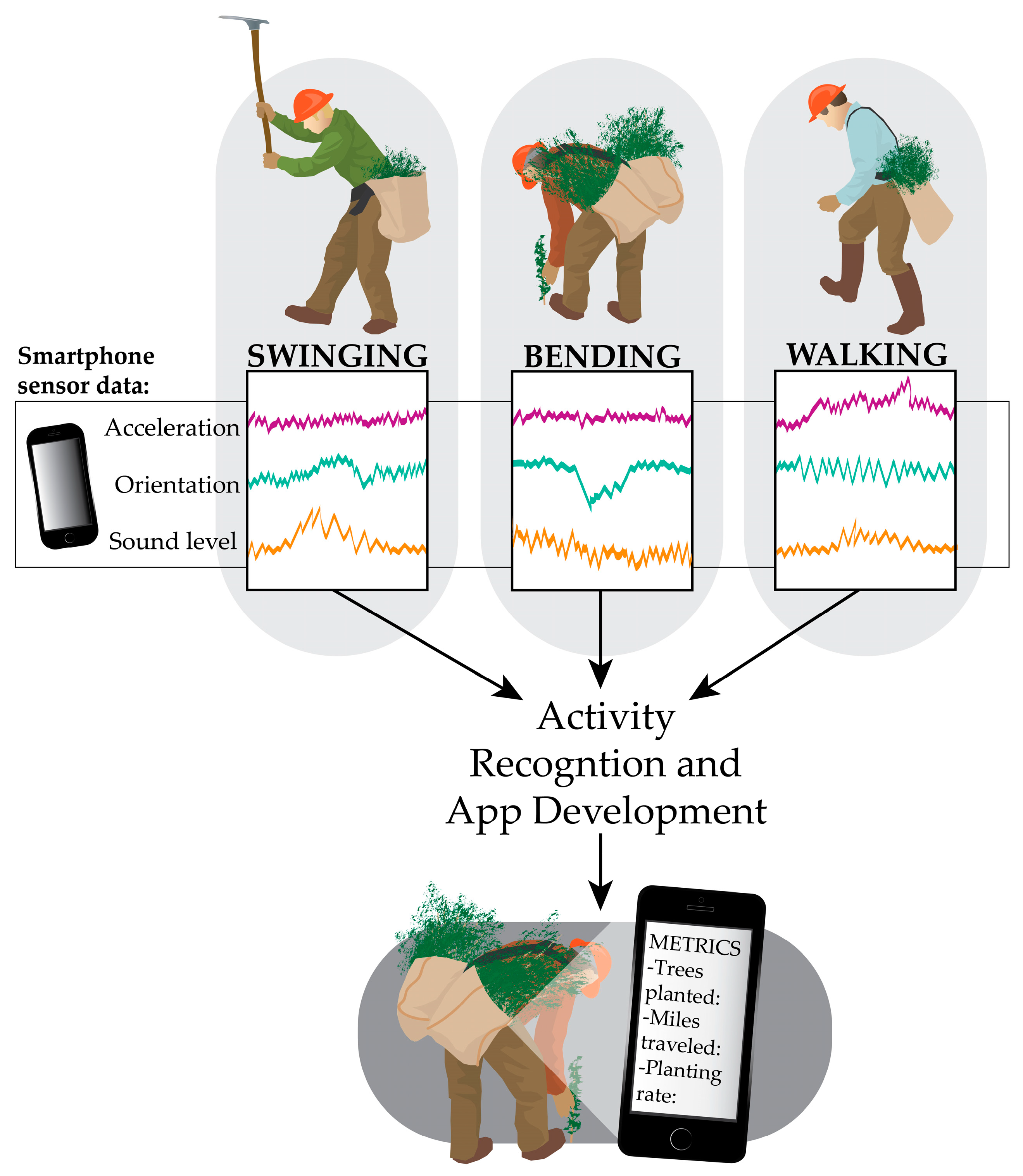
4.4. Activity Recognition
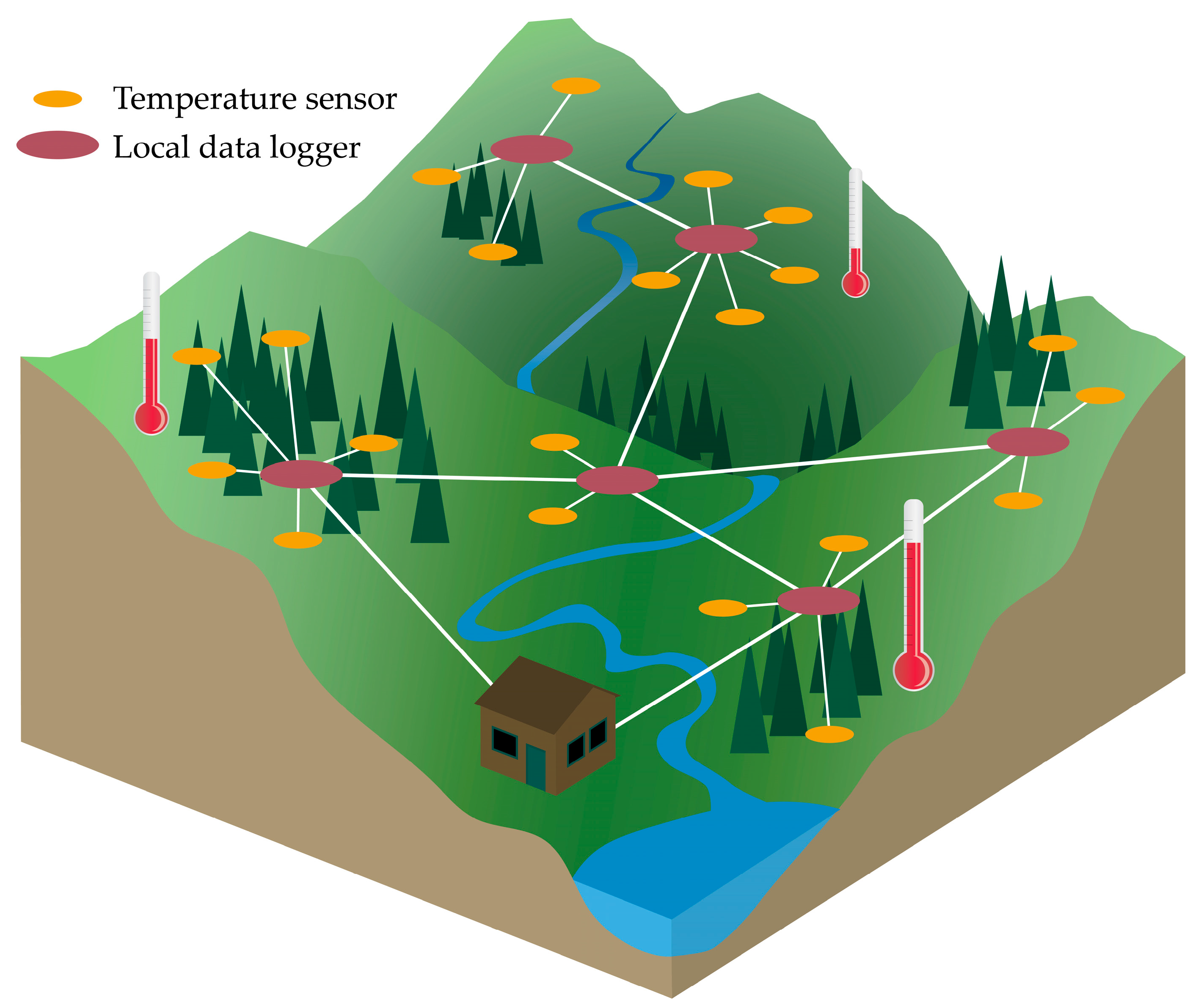
4.5. Mesh Networking
4.6. The Internet of Things (IoT)
4.7. Big Data
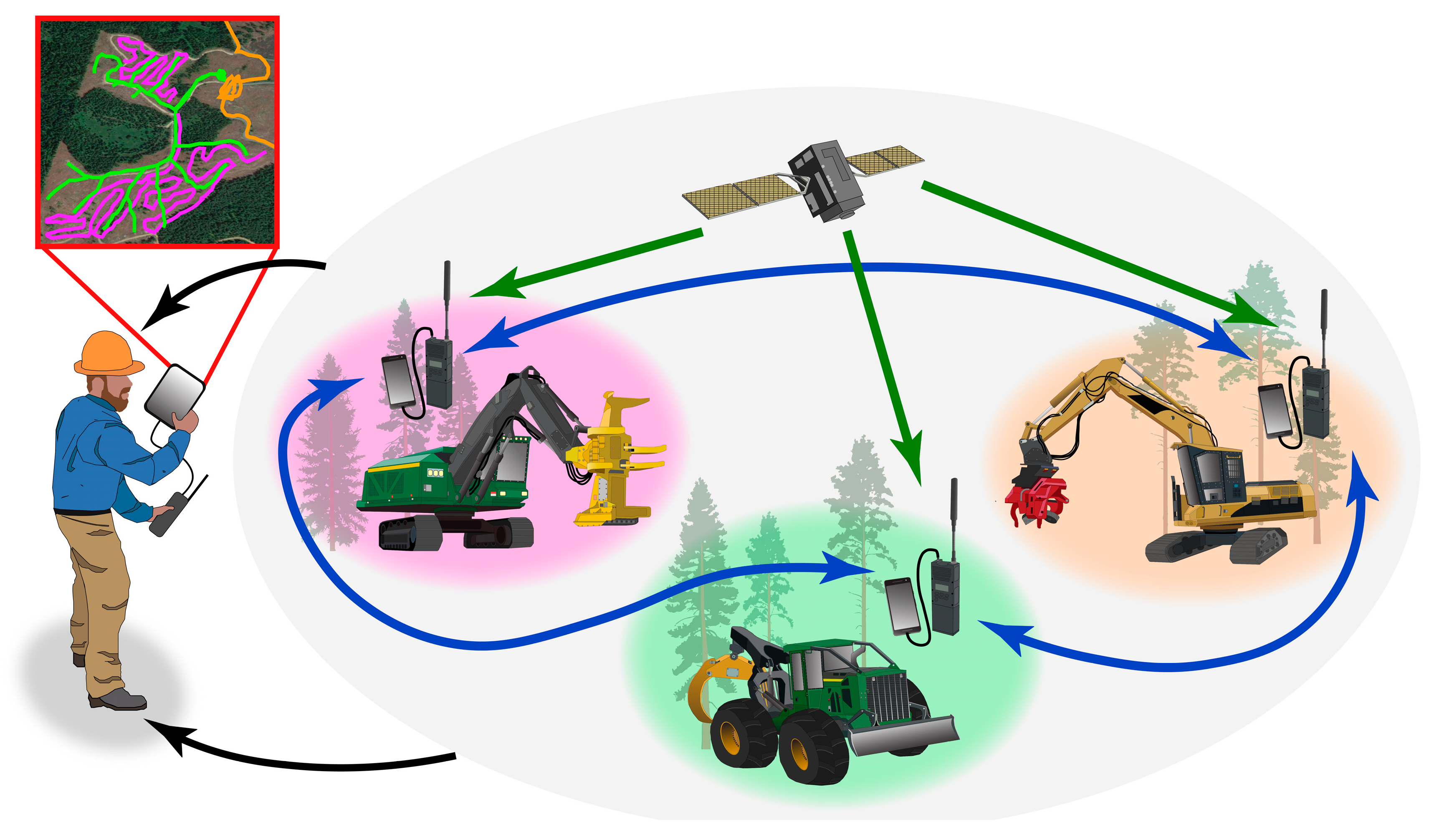
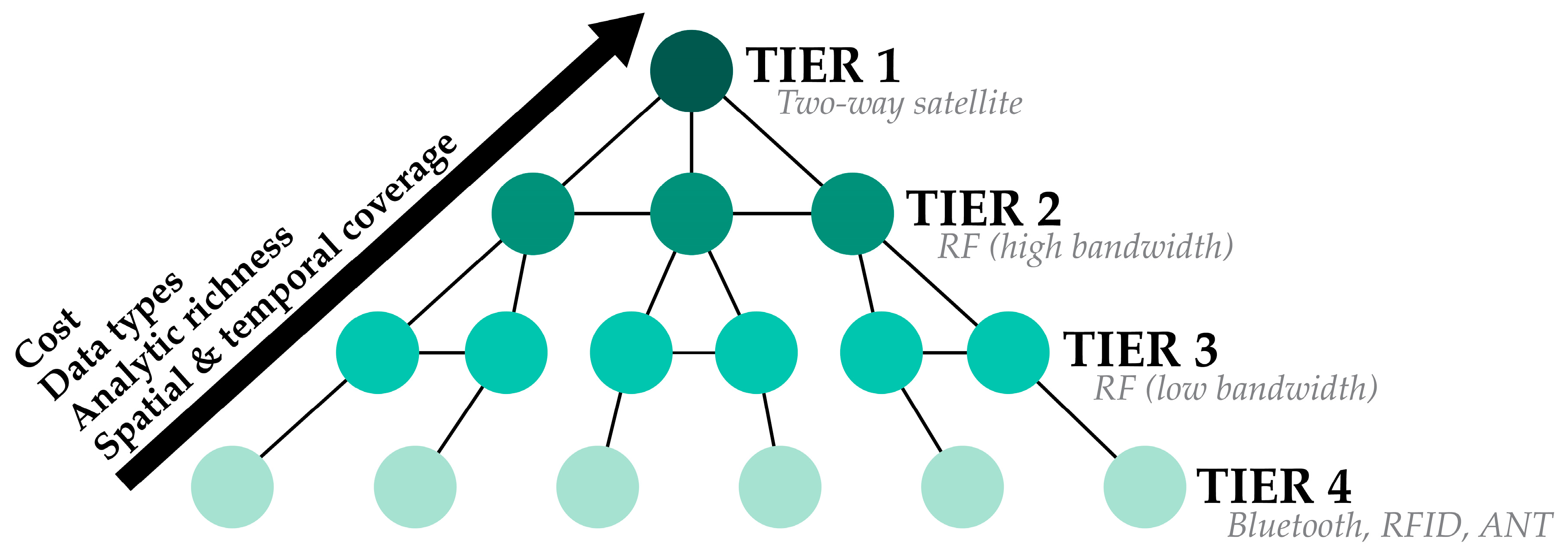
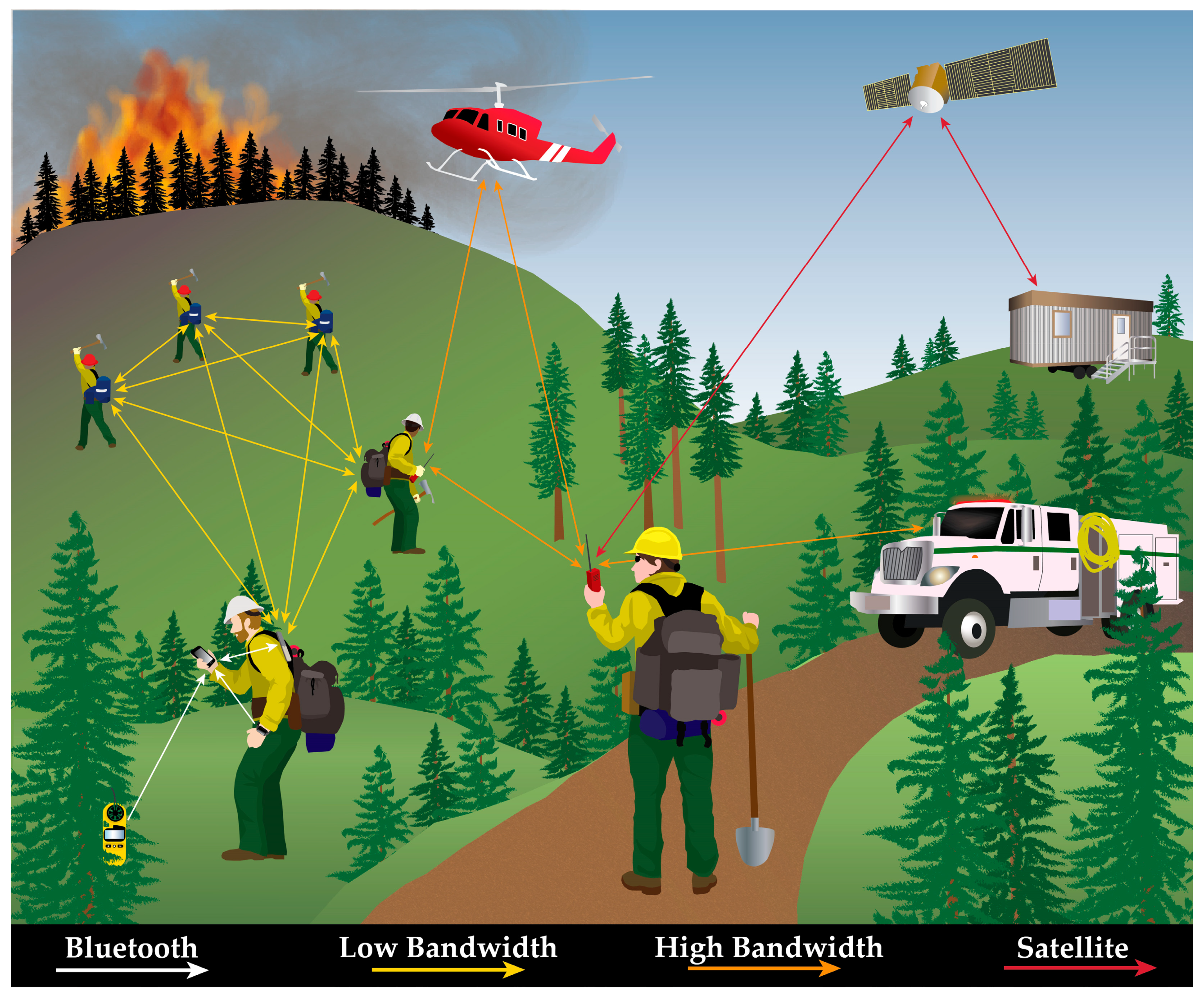
5. A Hierarchical Model for Processing and Sharing Data
6. Emerging Research Needs
6.1. Development of Activity Recognition Models for Individual Worker and Equipment Tasks in Forestry, Wildland Firefighting, and Natural Resources
6.2. Development of New Sampling, Analytical, and Statistical Methods to Quantify Real-Time Resource Movements in Time and Space for Many Agents
6.3. Evaluation of Data Network Quality in Mission-Critical Operations with many Resources
6.4. Development of Integrated Formats and Protocols for Sharing Augmented PNT and Other Big Data
6.5. Landscape-Scale Mapping of Vegetation and Canopy Impacts on Position Accuracy
6.6. Developing Applications to Improve Worker and Recreational Health and Safety in Natural Resources
6.7. Evaluating Potential Adverse Health Impacts of Wearable Technology Use
6.8. Addressing and Establishing Policies to Resolve Social and Ethical Concerns Associated with Sharing Worker Health Data
6.9. Normative Research Evaluating New Use Cases of LBS and IoT Concepts to Improve Natural Resource Science and Management
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
Appendix A.1. Search Methodology

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Manuscript Subject | Search Term 1 | Search Term 2 | Search Term 3 |
|---|---|---|---|
| GPS (forestry) | GPS forestry | GPS forest accuracy | GPS forest range |
| GPS (wildland fire) | GPS wildland fire | GPS wildland fire accuracy | GPS wildland fire range |
| GNSS (forestry) | GNSS forestry | GNSS forest accuracy | GNSS forest range |
| GNSS (wildland fire) | GNSS wildland fire | GNSS wildland fire accuracy | GNSS wildland fire range |
| GNSS-RF (forestry) | GNSS-RF forestry | GNSS-RF forest accuracy | GNSS-RF forest range |
| GNSS-RF (wildland fire) | GNSS-RF wildland fire | GNSS-RF wildland fire accuracy | GNSS-RF wildland fire range |
| Bluetooth (forestry) | Bluetooth forestry | Bluetooth forest accuracy | Bluetooth forest range |
| Bluetooth (wildland fire) | Bluetooth wildland fire | Bluetooth wildland fire accuracy | Bluetooth wildland fire range |
| Ultra wideband (forestry) | Ultra wideband forestry | Ultra wideband forest accuracy | Ultra wideband forest range |
| Ultra wideband (wildland fire) | Ultra wideband wildland fire | Ultra wideband wildland fire accuracy | Ultra wideband wildland fire range |
| INS (forestry) | Inertial navigation system forestry | Inertial navigation system forest accuracy | Inertial navigation system forest range |
| INS (wildland fire) | Inertial navigation system wildland fire | Inertial navigation system wildland fire accuracy | Inertial navigation system wildland fire range |
| RFID (forestry) | RFID forestry | RFID forest accuracy | RFID forest range |
| RFID (wildland fire) | RFID wildland fire | RFID wildland fire accuracy | RFID wildland fire range |
| QR code (forestry) | QR code forestry | QR code forest accuracy | QR code forest range |
| QR code (wildland fire) | QR code wildland fire | QR code wildland fire accuracy | QR code wildland fire range |
| Manuscript Sub-section | Search Term 1 | Search Term 2 | Search Term 3 |
|---|---|---|---|
| 4.1. | Location-based services | Location-based services forest | Location-based services forestry 1 |
| 4.2. | Geofences | Geofence forest | Geofence forestry |
| 4.3. | Wearable technology | Wearable technology forest 1 | Wearable technology forestry |
| 4.4. | Activity recognition | Activity recognition forest 1 | Activity recognition forestry 1 |
| 4.5. | Mesh networking | Mesh network forest | Mesh network forestry |
| Wireless sensor network forest | Wireless sensor network forestry | ||
| 4.6. | Internet of Things | Internet of Things forest 1 | Internet of Things forestry |
| 4.7. | Big data | Big data forest 1 | Big data forestry |
Appendix A.2. Screening, Inclusion, and Bias
References
- Li, X.; Zhang, X.; Ren, X.; Fritsche, M.; Wickert, J.; Schuh, H. Precise positioning with current multi-constellation global navigation satellite systems: GPS, GLONASS, Galileo and BeiDou. Sci. Rep. 2015, 5, 8328. [Google Scholar] [CrossRef] [PubMed]
- Grewal, M.S.; Andrews, A.P.; Bartone, C.G. Global Navigation Satellite Systems, Inertial Navigation, and Integration, 3rd ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2013; pp. 4–10. ISBN 978-1-118-44700-0. [Google Scholar]
- Murphy, G.; Clark, J.A.; Pilkerton, S. Current and potential tagging and tracking systems for logs harvested from Pacific Northwest forests. West. J. Appl. For. 2012, 27, 84–91. [Google Scholar] [CrossRef]
- Tzoulis, I.K.; Andreopoulou, Z.S.; Voulgaridis, E. Wood tracking information systems to confront illegal logging. J. Agric. Inform. 2014, 5, 9–17. [Google Scholar] [CrossRef]
- Ahmad, S.; Lu, R.; Ziaullah, M. Bluetooth an optimal solution for personal asset tracking: A comparison of Bluetooth, RFID and miscellaneous anti-lost tracking technologies. Int. J. U- E-Serv. Sci. Technol. 2015, 8, 179–188. [Google Scholar] [CrossRef]
- Tang, J.; Chen, Y.; Kukko, A.; Kaartinen, H.; Jaakkola, A.; Khoramshahi, E.; Hakala, T.; Hyyppä, J.; Holopainen, M.; Hyyppä, H. SLAM-aided stem mapping for forest inventory with small-footprint mobile LiDAR. Forests 2015, 6, 4588–4606. [Google Scholar] [CrossRef]
- Qian, C.; Liu, H.; Tang, J.; Chn, Y.; Kaartinen, H.; Kukko, A.; Zhu, L.; Liang, X.; Chen, L.; Hyyppä, J. An integrated GNSS/INS/LiDAR-SLAM positioning method for highly accurate forest stem mapping. Remote Sens. 2017, 9, 3. [Google Scholar] [CrossRef]
- Shoaib, M.; Bosch, S.; Incel, O.D.; Scholten, H.; Havinga, P.J.M. Complex human activity recognition using smartphone and wrist-worn sensors. Sensors 2016, 16, 426. [Google Scholar] [CrossRef] [PubMed]
- Weiss, G.M.; Timko, J.L.; Gallagher, C.M.; Yoneda, K.; Schreiber, A.J. Smartwatch-based activity recognition: A machine learning approach. In Proceedings of the 2016 IEEE-EMBS International Conference on Biomedical and Health Informatics (BHI), Las Vegas, NV, USA, 24–27 February 2016; pp. 426–429. [Google Scholar]
- Moschetti, A.; Fiorini, L.; Esposito, D.; Dario, P.; Cavallo, F. Recognition of daily gestures with wearable inertial rings and bracelets. Sensors 2016, 16, 1341. [Google Scholar] [CrossRef]
- Anjum, A.; Ilyas, M.U. Activity recognition using smartphone sensors. In Proceedings of the 2013 IEEE 10th Consumer Communications and Networking Conference, Las Vegas, NV, USA, 11–14 January 2013; pp. 914–919. [Google Scholar]
- Del Rosario, M.B.; Redmond, S.J.; Lovell, N.H. Tracking the evolution of smartphone sensing for monitoring human movement. Sensors 2015, 15, 18901–18933. [Google Scholar] [CrossRef]
- Shoaib, M.; Bosch, S.; Incel, O.D.; Scholten, H.; Havinga, P.J.M. A survey of online activity recognition using mobile phones. Sensors 2015, 15, 2059–2085. [Google Scholar] [CrossRef]
- Keefe, R.F.; Zimbelman, E.G.; Wempe, A.M. Use of smartphone sensors to quantify the productive cycle elements of hand fallers on industrial cable logging operations. Int. J. For. Eng. 2019. [Google Scholar] [CrossRef]
- Swan, M. The quantified self: Fundamental disruption in big data science and biological discovery. Big Data 2013, 1, 85–99. [Google Scholar] [CrossRef]
- Lara, O.D.; Labrador, M.A. A survey on human activity recognition using wearable sensors. IEEE Commun. Surv. Tutor. 2013, 15, 1192–1209. [Google Scholar] [CrossRef]
- Choudhurry, T.; Consolvo, S.; Harrison, B.; Hightower, J.; LaMarca, A.; LeGrand, L.; Rahimi, A.; Rea, A.; Borriello, G.; Hemingway, B.; et al. The mobile sensing platform: An embedded activity recognition system. IEEE Pervasive Comput. 2008, 7, 32–41. [Google Scholar] [CrossRef]
- Kwapisz, J.R.; Weiss, G.M.; Moore, S.A. Activity recognition using cell phone accelerometers. ACM SigKDD Explor. Newsl. 2010, 12, 74–82. [Google Scholar] [CrossRef]
- Brown, D.D.; LaPoint, S.; Kays, R.; Heidrich, W.; Kümmeth, F.; Wikelski, M. Accelerometer-informed GPS telemetry: Reducing the trade-off between resolution and longevity. Wildl. Soc. Bull. 2012, 36, 139–146. [Google Scholar] [CrossRef]
- Keefe, R.F.; Eitel, J.U.H.; Smith, A.M.S.; Tinkham, W.T. Applications of multi-transmitter GPS-VHF in forest operations. In Proceedings of the 47th International Symposium on Forestry Mechanization and 5th International Forest Engineering Conference, Gerardmer, France, 23–26 September 2014. [Google Scholar]
- Wempe, A.M.; Keefe, R.K. Characterizing rigging crew proximity to hazards on cable logging operations using GNSS-RF: Effect of GNSS positioning error on worker safety status. Forests 2017, 8, 357. [Google Scholar] [CrossRef]
- Zimbelman, E.G.; Keefe, R.F.; Strand, E.K.; Kolden, C.A.; Wempe, A.M. Hazards in motion: Development of mobile geofences for use in logging safety. Sensors 2017, 17, 822. [Google Scholar] [CrossRef]
- Zimbelman, E.G.; Keefe, R.K. Real-time positioning in logging: Effects of forest stand characteristics, topography, and line-of-sight obstructions on GNSS-RF transponder accuracy and radio signal propagation. PLoS ONE 2018, 13, e0191017. [Google Scholar] [CrossRef] [PubMed]
- Parkinson, B.W.; Spilker, J.J. Global Positioning System: Theory and Applications, Volume I; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 1996; pp. 3–28. ISBN 978-1-56347-106-3. [Google Scholar]
- Chen, L.; Zhao, Q.; Hu, Z.; Jiang, X.; Geng, C.; Ge, M.; Shi, C. GNSS global real-time augmentation positioning: Real-time precise satellite clock estimation, prototype system construction and performance analysis. Adv. Space Res. 2018, 61, 367–384. [Google Scholar] [CrossRef]
- Frenzel, L.E., Jr. Principles of Electronic Communication Systems, 4th ed.; McGraw-Hill: New York, NY, USA, 2016; p. 945. ISBN 978-0-07-337385-0. [Google Scholar]
- Adrados, C.; Girard, I.; Gendner, J.; Janeau, G. Global Positioning System (GPS) location accuracy improvement due to Selective Availability removal. C. R. Biol. 2002, 325, 165–170. [Google Scholar] [CrossRef]
- Andersen, H.E.; Clarkin, T.; Winterberger, K.; Strunk, J. An accuracy assessment of positions obtained using survey- and recreational-grade global positioning system receivers across a range of forest conditions within the Tanana Valley of interior Alaska. West. J. Appl. For. 2009, 24, 128–136. [Google Scholar] [CrossRef]
- Tomaštík, J.; Tomaštík, J.; Saloň, S.; Piroh, R. Horizontal accuracy and applicability of smartphone GNSS positioning in forest. Forestry 2017, 90, 187–198. [Google Scholar] [CrossRef]
- Valbuena, R.; Mauro, F.; Rodriguez-Solano, R.; Manzanera, J.A. Accuracy and precision of GPS receivers under forest canopies in mountainous environment. Span. J. Agric. Res. 2010, 8, 1047–1057. [Google Scholar] [CrossRef]
- Wing, M.G.; Eklund, A.; Kellogg, L.D. Consumer-grade global positioning system (GPS) accuracy and reliability. J. For. 2005, 103, 169–173. [Google Scholar] [CrossRef]
- Wing, M.G. Consumer-grade global positioning systems (GPS) receiver performance. J. For. 2008, 106, 185–190. [Google Scholar] [CrossRef]
- Wing, M.G. Consumer-grade GPS receiver measurement accuracy in varying forest conditions. Res. J. For. 2011, 5, 78–88. [Google Scholar] [CrossRef]
- Bettinger, P.; Fei, S. One year’s experience with a recreation-grade GPS receiver. Math. Comput. For. Nat. Res. Sci. 2010, 2, 153–160. [Google Scholar]
- Akbulut, R.; Ucar, Z.; Bettinger, P.; Merry, K.; Obata, S. Effects of forest thinning on static horizontal position accuracy collected with a mapping-grade GNSS receiver. Math. Comput. For. Nat. Res. Sci. 2017, 9, 14–21. [Google Scholar]
- Sigrist, P.; Coppin, P.; Hermy, M. Impact of forest canopy on quality and accuracy of GPS measurements. Int. J. Remote Sens. 1999, 20, 3595–3610. [Google Scholar] [CrossRef]
- Weaver, S.A.; Ucar, Z.; Bettinger, P.; Merry, K. How a GNSS receiver is held may affect static position accuracy. PLoS ONE 2015, 10, e0124696. [Google Scholar] [CrossRef] [PubMed]
- Johnson, C.E.; Barton, C.C. Where in the world are my field plots? Using GPS effectively in environmental field studies. Front. Ecol. Environ. 2004, 2, 475–482. [Google Scholar] [CrossRef]
- Evans, D.L.; Carraway, R.W.; Simmons, G.T. Use of global positioning system (GPS) for forest plot location. South. J. Appl. For. 1992, 16, 67–70. [Google Scholar] [CrossRef]
- Liu, C.J.; Brantigan, R. Using differential GPS for forest traverse surveys. Can. J. For. Res. 1995, 25, 1795–1805. [Google Scholar] [CrossRef]
- Tachiki, Y.; Yoshimura, T.; Hasegawa, H.; Mita, T.; Sakai, T.; Nakamura, F. Effects of polyline simplification of dynamic GPS data under forest canopy on area and perimeter estimations. J. For. Res. 2005, 10, 419–427. [Google Scholar] [CrossRef]
- McDonald, T.P.; Taylor, S.E.; Rummer, R.B. Deriving forest harvesting machine productivity from positional data. In Proceedings of the 2000 ASAE Annual International Meeting, Milwaukee, WI, USA, 9–12 July 2000. Paper No. 005011. [Google Scholar]
- McDonald, T.P.; Fulton, J.P. Automated time study of skidders using global positioning system data. Comput. Electron. Agric. 2005, 48, 19–37. [Google Scholar] [CrossRef] [Green Version]
- Gallo, R.; Grigolato, S.; Cavalli, R.; Mazzetto, F. GNSS-based operational monitoring devices for forest logging operation chains. J. Agric. Eng. 2013, 44, e27. [Google Scholar] [CrossRef]
- Strandgard, M.; Mitchell, R. Automated time study of forwarders using GPS and a vibration sensor. Croat. J. For. Eng. 2015, 36, 175–184. [Google Scholar]
- Carter, E.A.; McDonald, T.P.; Torbert, J.L. Application of GPS technology to monitor traffic intensity and soil impacts in a forest harvest operation. In Proceedings of the Tenth Biennial Southern Silvicultural Research Conference, Shreveport, LA, USA, 16–18 February 1999. [Google Scholar]
- McDonald, T.P.; Carter, E.A.; Taylor, S.E. Using the global positioning system to map disturbance patterns of forest harvesting machinery. Can. J. For. Res. 2002, 32, 310–319. [Google Scholar] [CrossRef]
- Devlin, G.J.; McDonnell, K. Performance accuracy of real-time GPS asset tracking systems for timber haulage trucks travelling on both internal forest road and public road networks. Int. J. For. Eng. 2009, 20, 45–49. [Google Scholar] [CrossRef]
- Spinelli, R.; Magagnotti, N.; Pari, L.; De Francesco, F. A comparison of tractor-trailer units and high-speed forwarders used in Alpine forestry. Scand. J. For. Res. 2015, 30, 470–477. [Google Scholar] [CrossRef]
- Macrì, G.; Zimbalatti, G.; Russo, D.; Proto, A.R. Measuring the mobility parameters of tree-length forwarding systems using GPS technology in the Southern Italy forestry. Agron. Res. 2016, 14, 836–845. [Google Scholar]
- Oderwald, R.G.; Boucher, B.A. GPS after selective availability: How accurate is accurate enough? J. For. 2003, 101, 24–27. [Google Scholar] [CrossRef]
- Wilkie, D.S. Performance of a backpack GPS in a tropical rain forest. Photogramm. Eng. Remote Sens. 1989, 55, 1747–1749. [Google Scholar]
- Stratton, R.D. Guidance on Spatial Wildland Fire Analysis: Models, Tools, and Techniques; General Technical Reports RMRS-GTR-183; U.S. Department of Agriculture, Forest Service, Rocky Mountain Research Station: Fort Collins, CO, USA, 2006. [CrossRef]
- Stow, D.A.; Riggan, P.J.; Storey, E.A.; Coulter, L.L. Measuring fire spread rates from repeat pass airborne thermal infrared imagery. Remote Sens. Lett. 2014, 5, 803–812. [Google Scholar] [CrossRef]
- Kennedy, R.; McLeman, R.; Sawada, M.; Smigielski, J. Use of smartphone technology for small-scale silviculture: A test of low-cost technology in eastern Ontario. Small-Scale For. 2014, 13, 101–115. [Google Scholar] [CrossRef]
- Kangas, A.; Rasinmäki, J.; Eyvindson, K.; Chambers, P. A mobile phone application for the collection of opinion data for forest planning purposes. Environ. Manag. 2015, 55, 961–971. [Google Scholar] [CrossRef] [PubMed]
- Olyazadeh, R.; Sudmeier-Rieux, K.; Jaboyedoff, M.; Derron, M.H.; Devkota, S. An offline-online Web-GIS Android application for fast data acquisition of landslide hazard and risk. Nat. Hazards Earth Syst. Sci. 2017, 17, 549–561. [Google Scholar] [CrossRef]
- Avenza. Available online: https://www.avenzamaps.com/ (accessed on 11 December 2018).
- Bowering, R.; Wigle, R.; Padgett, T.; Adams, B.; Cote, D.; Wiersma, Y.F. Searching for rare species: A comparison of Floristic Habitat Sampling and Adaptive Cluster Sampling for detecting and estimating abundance. For. Ecol. Manag. 2018, 407, 1–8. [Google Scholar] [CrossRef]
- Witt, E.C., III. Geospatial resources for the geology community: The USGS National Map. J. Geol. 2015, 123, 283–294. [Google Scholar] [CrossRef]
- D’Andrimont, R.; Lemoine, G.; van der Velde, M. Targeted grassland monitoring at parcel level using sentinels, street-level images and field observations. Remote Sens. 2018, 10, 1300. [Google Scholar] [CrossRef]
- Maclauchlan, L. Quantification of Dryocoetes confuses-caused mortality in subalpine fir forests of southern British Columbia. For. Ecol. Manag. 2016, 359, 210–220. [Google Scholar] [CrossRef]
- Kaartinen, H.; Hyyppä, J.; Vastaranta, M.; Kukko, A.; Jaakkola, A.; Yu, X.; Pyörälä, J.; Liang, X.; Liu, J.; Wang, Y.; et al. Accuracy of kinematic positioning using global satellite navigation systems under forest canopies. Forests 2015, 6, 3218–3236. [Google Scholar] [CrossRef]
- Arnold, L.L.; Zandbergen, P.A. Positional accuracy of the Wide Area Augmentation System in consumer-grade GPS units. Comput. Geosci. 2011, 37, 883–892. [Google Scholar] [CrossRef]
- Bolstad, P.; Jenks, A.; Berkin, J.; Horne, K.; Reading, W.H. A comparison of autonomous, WAAS, real-time, and post-processed global positioning systems (GPS) accuracies in northern forests. North. J. Appl. For. 2005, 22, 5–11. [Google Scholar] [CrossRef]
- Pirti, A.; Gümüş, K.; Erkaya, H.; Hoşbaş, R.G. Evaluating repeatability of RTK GPS/GLONASS near/under forest environment. Croat. J. For. Eng. 2010, 31, 23–33. [Google Scholar]
- Guo, J.; Li, X.; Li, Z.; Hu, L.; Yang, G.; Zhao, C.; Fairbairn, D.; Watson, D.; Ge, M. Multi-GNSS precise point positioning for precision agriculture. Precis. Agric. 2018, 19, 895–911. [Google Scholar] [CrossRef] [Green Version]
- Pampagnin, L.-H.; Peyret, F.; Garcia, G. Architecture of a GPS-based guiding system for road compaction. In Proceedings of the 1998 IEEE International Conference on Robotics & Automation, Leuven, Belgium, 20 May 1998; pp. 2422–2427. [Google Scholar] [CrossRef]
- Bouvet, D.; Froumentin, M.; Garcia, G. A real-time localization system for compactors. Autom. Constr. 2001, 10, 417–428. [Google Scholar] [CrossRef]
- Næsset, E.; Gjevestad, J.G. Performance of GPS precise point positioning under conifer forest canopies. Photogramm. Eng. Remote Sens. 2008, 74, 661–668. [Google Scholar] [CrossRef]
- Li, X.; Ge, M.; Dai, X.; Ren, X.; Fritsche, M.; Wicker, J.; Schuh, H. Accuracy and reliability of multi-GNSS real-time precise positioning: GPS, GLONASS, BeiDou, and Galileo. J. Geod. 2015, 89, 607–635. [Google Scholar] [CrossRef]
- Google. Share Your Real-Time Location with Others. Available online: https://support.google.com/maps/answer/7326816?co=GENIE.Platform%3DAndroid&hl=en (accessed on 13 December 2018).
- Sun, G.; Chen, J.; Guo, W.; Liu, K.J.R. Signal processing techniques in network-aided positioning: A survey of state-of-the-art positioning designs. IEEE Signal Process. Mag. 2005, 22, 12–23. [Google Scholar] [CrossRef]
- Van Diggelen, F.S.T. A-GPS: Assisted GPS, GNSS, and SBAS; Artech House: Boston, MA, USA, 2009; ISBN 978-1-59693-374-3. [Google Scholar]
- Medbo, J.; Siomina, I.; Kangas, A.; Furuskog, J. Propagation channel impact on LTE positioning accuracy: A study based on real measurements of observed time difference of arrival. In Proceedings of the 2009 IEEE 20th International Symposium on Personal, Indoor and Mobile Radio Communications, Tokyo, Japan, 13–16 September 2009; pp. 2213–2217. [Google Scholar] [CrossRef]
- Bierlaire, M.; Chen, J.; Newman, J. A probabilistic map matching method for smartphone GPS data. Transp. Res. Part C Emerg. Technol. 2013, 26, 78–98. [Google Scholar] [CrossRef]
- Tariq, Z.B.; Cheema, D.M.; Kamran, M.Z.; Naqvi, I.H. Non-GPS positioning systems: A survey. ACM Comput. Surv. 2017, 50, 57. [Google Scholar] [CrossRef]
- O’Reilly, G.; Jrad, A.; Nagarajan, R.; Brown, T.; Conrad, S. Critical infrastructure analysis of telecom for natural disasters. In Proceedings of the 12th International Telecommunications Network Strategy and Planning Symposium, New Delhi, India, 6–9 November 2006. [Google Scholar] [CrossRef]
- Sterling, D.E.; Hatlelid, J.E. The IRIDIUM system—A revolutionary satellite communications system developed with innovative applications of technology. In Proceedings of the 1991 IEEE Military Communications Conference (MILCOM 91), McLean, VA, USA, 4–7 November 1991; pp. 436–440. [Google Scholar] [CrossRef]
- Worley, G.H. Wilderness communications. Wilderness Environ. Med. 2011, 22, 262–269. [Google Scholar] [CrossRef] [PubMed]
- Sarwar, A.; Li, B.; Dempster, A.G. SPOT in location based emergency services, LBES detailed analysis. In Proceedings of the International Global Navigation Satellite Systems Society Symposium, Queensland, Australia, 1–3 December 2009. [Google Scholar]
- inReach Global Satellite Technology. Available online: https://explore.garmin.com/en-US/inreach/ (accessed on 30 November 2018).
- Saved by SPOT. Available online: https://www.findmespot.com/en/ (accessed on 13 December 2018).
- Iridium NEXT. Available online: https://www.iridium.com/network/iridium-next/ (accessed on 13 December 2018).
- Grayson, L.M.; Keefe, R.F.; Tinkham, W.T.; Eitel, J.U.H.; Saralecos, J.D.; Smith, A.M.S.; Zimbelman, E.G. Accuracy of WAAS-enabled GPS-RF warning signals when crossing a terrestrial geofence. Sensors 2016, 16, 912. [Google Scholar] [CrossRef]
- Becker, R.M.; Keefe, R.K.; Anderson, N.M. Use of real-time GNSS-RF data to characterize the swing movements of forestry equipment. Forests 2017, 8, 44. [Google Scholar] [CrossRef]
- Newman, S.M.; Keefe, R.F.; Brooks, R.H.; Ahonen, E.Q.; Wempe, A.M. Human factors affecting logging injury incidents in Idaho and the potential for real-time location-sharing technology to improve safety. Safety 2018, 4, 43. [Google Scholar] [CrossRef] [PubMed]
- Wempe, A.M.; Keefe, R.F.; Newman, S.M.; Paveglio, T.B. Intent to adopt location sharing for logging safety applications. Safety 2019, 5, 7. [Google Scholar] [CrossRef]
- Taylor, J.D. (Ed.) Introduction to Ultra-Wideband Radar Systems; CRC Press: Boca Raton, FL, USA, 1995. [Google Scholar]
- Anderson, C.R.; Volos, H.I.; Headley, W.C.; Müller, F.C.B.F.; Buehrer, R.M. Low antenna ultra wideband propagation measurements and modeling in a forest environment. In Proceedings of the 2008 IEEE Wireless Communications and Networking Conference, Las Vegas, NV, USA, 31 March–3 April 2008; pp. 1229–1234. [Google Scholar] [CrossRef]
- Alarifi, A.; Al-Salman, A.; Alsaleh, M.; Alnafessah, A.; Al-Hadhrami, S.; Al-Ammar, M.A.; Al-Khalifa, H.S. Ultra wideband indoor positioning technologies: Analysis and recent advances. Sensors 2016, 16, 707. [Google Scholar] [CrossRef]
- Gezici, S.; Tian, Z.; Giannakis, G.B.; Kobayashi, H.; Molisch, A.F.; Poor, H.V.; Sahinoglu, Z. Localization via ultra-wideband radios: A look at positioning aspects for future sensor networks. IEEE Signal Process. Mag. 2005, 22, 70–84. [Google Scholar] [CrossRef]
- Liu, J.; Wang, Q.; Wan, J.; Xiong, J. Towards real-time indoor localization in wireless sensor networks. In Proceedings of the 2012 IEEE 12th International Conference on Computer and Information Technology, Chengdu, China, 27–29 October 2012. [Google Scholar] [CrossRef]
- García, E.; Poudereux, P.; Hernández, A.; Ureña, J.; Gualda, D. A robust UWB indoor positioning system for highly complex environments. In Proceedings of the 2015 IEEE International Conference on Industrial Technology, Seville, Spain, 17–19 March 2015. [Google Scholar] [CrossRef]
- Jiménez, A.R.; Seco, F. Comparing Decawave and Bespoon UWB location systems: Indoor/outdoor performance analysis. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation, Alcalá de Henares, Spain, 4–7 October 2016. [Google Scholar] [CrossRef]
- Hussey, N.E.; Kessel, S.T.; Aarestrup, K.; Cooke, S.J.; Cowley, P.D.; Fisk, A.T.; Harcourt, R.G.; Holland, K.N.; Iverson, S.J.; Kocik, J.F.; et al. Aquatic animal telemetry: A panoramic window into the underwater world. Science 2015, 348, 1255642. [Google Scholar] [CrossRef] [Green Version]
- Kays, R.; Crofoot, M.C.; Jetz, W.; Wikelski, M. Terrestrial animal tracking as an eye on life and planet. Science 2015, 348, aaa2478. [Google Scholar] [CrossRef] [Green Version]
- Wilmers, C.C.; Nickel, B.; Bryce, C.M.; Smith, J.A.; Wheat, R.E.; Yovovich, V. The golden age of bio-logging: How animal-borne sensors are advancing the frontiers of ecology. Ecology 2015, 96, 1741–1753. [Google Scholar] [CrossRef]
- Mulero-Pázmány, M.; Barasona, J.Á.; Acevedo, P.; Vicente, J.; Negro, J.J. Unmanned Aircraft Systems complement biologging in spatial ecology studies. Ecol. Evol. 2015, 5, 4808–4818. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tomkiewicz, S.M.; Fuller, M.R.; Kie, J.G.; Bates, K.K. Global Positioning System and associated technologies in animal behaviour and ecological research. Philos. Trans. R. Soc. Lond. B Biol. Sci. 2010, 365, 2163–2176. [Google Scholar] [CrossRef] [PubMed]
- Wall, J.; Wittemyer, G.; Klinkenberg, B.; Douglas-Hamilton, I. Novel opportunities for wildlife conservation and research with real-time monitoring. Ecol. Appl. 2014, 24, 593–601. [Google Scholar] [CrossRef] [Green Version]
- Beauregard, S.; Haas, H. Pedestrian dead reckoning: A basis for personal positioning. In Proceedings of the 3rd Workshop on Positioning, Navigation and Communication (WPNC’06), Hannover, Germany, 16 March 2006; pp. 27–35. [Google Scholar]
- Ryu, J.H.; Gankhuyag, G.; Chong, K.T. Navigation system heading and position accuracy improvement through GPS and INS data fusion. J. Sens. 2016, 2016, 7942963. [Google Scholar] [CrossRef]
- Li, Z.; Chang, G.; Gao, J.; Wang, J.; Hernandez, A. GPS/UWB/MEMS-IMU tightly coupled navigation with improved robust Kalman filter. Adv. Space Res. 2016, 58, 2424–2434. [Google Scholar] [CrossRef]
- Rabbou, M.A.; El-Rabbany, A. Tightly coupled integration of GPS precise point positioning and MEMS-based inertial systems. GPS Solut. 2015, 19, 601–609. [Google Scholar] [CrossRef]
- Gao, Z.; Zhang, H.; Ge, M.; Niu, X.; Shen, W.; Wickert, J.; Schuh, H. Tightly coupled integration of ionosphere-constrained precise point positioning and inertial navigation systems. Sensors 2015, 15, 5783–5802. [Google Scholar] [CrossRef] [PubMed]
- Syed, Z.F.; Aggarwal, P.; Goodall, C.; Niu, X.; El-Sheimy, N. A new multi-position calibration method for MEMS inertial navigation systems. Meas. Sci. Technol. 2007, 18, 2007. [Google Scholar] [CrossRef]
- Riisgaard, S.; Blas, M.R. SLAM for Dummies—A Tutorial Approach to Simultaneous Localization and Mapping; 2003; Volume 22, p. 126. [Google Scholar]
- Hyyppä, J.; Virtanen, J.P.; Jaakkola, A.; Yu, X.; Hyyppä, H.; Liang, X. Feasibility of Google Tango and Kinect for crowdsourcing forestry information. Forests 2018, 9, 6. [Google Scholar] [CrossRef]
- Tomaštík, J.; Saloň, S.; Tunák, D.; Chudý, F.; Kardoš, M. Tango in forests—An initial experience of the use of the new Google technology in connection with forest inventory tasks. Comput. Electron. Agric. 2017, 141, 109–117. [Google Scholar] [CrossRef]
- White, C.E.; Bernstein, D.; Kornhauser, A.L. Some map matching algorithms for personal navigation assistants. Transp. Res. Part C Emerg. Technol. 2000, 8, 91–108. [Google Scholar] [CrossRef]
- Bernstein, D.; Kornhauser, A. An Introduction to Map Matching for Personal Navigation Assistants; Technical Report; New Jersey TIDE Center: Newark, NJ, USA, 1996. Available online: https://pdfs.semanticscholar.org/3171/8414a2b9aa25a69aa069a0c1220bbc59e018.pdf (accessed on 12 December 2018).
- Park, J.; Marks, E.; Cho, Y.K.; Suryanto, W. Performance test of wireless technologies for personnel and equipment proximity sensing in work zones. J. Constr. Eng. Manag. 2016, 142, 1–9. [Google Scholar] [CrossRef]
- Stojanovic, D.H.; Stojanovic, N.M. Indoor utilization and tracking: Methods, technologies and research challenges. Facta Univ. Ser. Mech. Autom. Control Robot. 2014, 13, 57–72. [Google Scholar]
- Jung, J.; Kang, D.; Bae, C. Distance estimation of smart device using Bluetooth. In Proceedings of the Eighth International Conference on Systems and Networks Communications (ICSNC 2013), Venice, Italy, 27 October–1 November 2013; pp. 13–18. [Google Scholar]
- Zhou, S.; Pollard, J.K. Position measurements using Bluetooth. IEEE Trans. Consum. Electron. 2006, 52, 555–558. [Google Scholar] [CrossRef]
- Faragher, R.; Harle, R. Location fingerprinting with Bluetooth Low Energy beacons. IEEE J. Sel. Areas Commun. 2015, 33, 2418–2428. [Google Scholar] [CrossRef]
- Collotta, M.; Pau, G.; Talty, T.; Tonguz, O.K. Bluetooth 5: A concrete step forward toward the IoT. IEEE Commun. Mag. 2018, 56, 125–131. [Google Scholar] [CrossRef]
- Nemati, E.; Deen, M.J.; Mondal, T. A wireless wearable ECG sensor for long-term applications. IEEE Commun. Mag. 2012, 50, 36–43. [Google Scholar] [CrossRef]
- Dementyev, A.; Hodges, S.; Taylor, S.; Smith, J. Power consumption analysis of Bluetooth Low Energy, ZigBee, and ANT sensor nodes in a cyclic sleep scenario. In Proceedings of the 2013 IEEE International Wireless Symposium (IWS), Beijing, China, 14–18 April 2013. [Google Scholar] [CrossRef]
- Passow, P.; Stoll, N.; Junginger, S.; Thurow, K. A wireless sensor node for long-term monitoring in life science applications. In Proceedings of the 2013 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Minneapolis, MN, USA, 6–9 May 2013. [Google Scholar] [CrossRef]
- Griffiths, C.J.G. Investigating Tools and Methods for Data Capture of Forestry Workers. Ph.D. Thesis, University of Waikato, Hamilton, New Zealand, 2016. [Google Scholar]
- Riddering, J.; Holden, Z.A.; Jolly, W.M.; Warren, A. Smartphone applications for data collection, dynamic modeling, and visualization in the wildland fire environment. Fire Manag. Today 2015, 74, 10–14. [Google Scholar]
- Aguilar-Garcia, A.; Fortes, S.; Barco, R.; Colin, E. Enhancing localization accuracy with multi-antenna UHF RFID fingerprinting. In Proceedings of the 2015 International Conference on Indoor Positioning and Indoor Navigation, Banff, AB, Canada, 13–16 October 2015. [Google Scholar] [CrossRef]
- Zhang, D.; Yang, L.T.; Chen, M.; Zhao, S.; Guo, M.; Zhang, Y. Real-time locating systems using active RFID for Internet of Things. IEEE Syst. J. 2016, 10, 1226–1235. [Google Scholar] [CrossRef]
- Majumder, S.P.; Mahmud, K. Evaluation of detection range of an active RFID in outdoor environment using receiver diversity with maximal ratio combining. Int. J. Inf. Electron. Eng. 2015, 5, 322–329. [Google Scholar] [CrossRef]
- Vojtech, L.; Neruda, M.; Skapa, J.; Novotny, J.; Bortel, R.; Korinek, T. Design of RFID outdoor localization system: RFID locator for disaster management. In Proceedings of the 2015 5th International Conference on the Internet of Things, Seoul, Korea, 26–28 October 2015. [Google Scholar] [CrossRef]
- Björk, A.; Erlandsson, M.; Häkli, J.; Jaakkola, K.; Nilsson, A.; Nummila, K.; Puntanen, V.; Sirkka, A. Monitoring environmental performance of the forestry supply chain using RFID. Comput. Ind. 2011, 62, 830–841. [Google Scholar] [CrossRef]
- Sirkka, A. Modelling traceability in the forestry wood supply chain. In Proceedings of the 2008 IEEE 24th International Conference on Data Engineering Workshop, Cancun, Mexico, 7–12 April 2008. [Google Scholar] [CrossRef]
- Slater, L.E. Introduction (special issue on telemetry). BioScience 1965, 15, 81–82. [Google Scholar] [CrossRef]
- Cooke, S.J.; Hinch, S.G.; Wikelski, M.; Andrews, R.D.; Kuchel, L.J.; Wolcott, T.G.; Butler, P.J. Biotelemetry: A mechanistic approach to ecology. Trends Ecol. Evol. 2004, 19, 334–343. [Google Scholar] [CrossRef]
- Adams, N.S.; Beeman, J.W.; Eiler, J.H. Telemetry Techniques: A User Guide for Fisheries Research; American Fisheries Society: Bethesda, MD, USA, 2012. [Google Scholar]
- Crossin, G.T.; Heupel, M.R.; Holbrook, C.M.; Hussey, N.E.; Lowerre-Barbieri, S.K.; Nguyen, V.M.; Raby, G.D.; Cooke, S.J. Acoustic telemetry and fisheries management. Ecol. Appl. 2017, 27, 1031–1049. [Google Scholar] [CrossRef] [PubMed]
- Prentice, E.F. Feasibility of using implantable passive integrated transponder (PIT) tags in salmonids. Fish-Marking Tech. 1990, 7, 317–322. [Google Scholar]
- Cooke, S.J.; Hinch, S.G.; Lucas, M.C.; Lutcavage, M. Fisheries Techniques, 3rd ed.; American Fisheries Society: Bethesda, MD, USA, 2012; pp. 819–881. [Google Scholar]
- Hockersmith, E.E.; Beeman, J.W. A history of telemetry in fishery research. In Telemetry Techniques: A User Guide for Fisheries Research; American Fisheries Society: Bethesda, MD, USA, 2012; pp. 7–19. ISBN 978-1-934874-26-4. [Google Scholar]
- Breen, M.J.; Ruetz, C.R.; Thompson, K.J.; Kohler, S.L. Movements of mottled sculpins (Cottus bairdii) in a Michigan stream: How restricted are they? Can. J. Fish. Aquat. Sci. 2009, 66, 31–41. [Google Scholar] [CrossRef]
- Bubb, D.H.; Thom, T.J.; Lucas, M.C. Movement patterns of the invasive signal crayfish determined by PIT telemetry. Can. J. Zool. 2006, 84, 1202–1209. [Google Scholar] [CrossRef]
- Kurth, J.; Loftin, C.; Zydlewski, J.; Rhymer, J. PIT tags increase effectiveness of freshwater mussel recaptures. J. N. Am. Benthol. Soc. 2007, 26, 253–260. [Google Scholar] [CrossRef]
- Fischer, J.R.; Neebling, T.E.; Quist, M.C. Development and evaluation of a boat-mounted RFID antenna for monitoring freshwater mussels. Freshw. Sci. 2012, 31, 148–153. [Google Scholar] [CrossRef]
- Fuchs, N.; Caudill, C.C. A framework for classifying and inferring behaviors using accelerometer biotelemetry. Ecol. Evol. under review.
- Achord, S.; Sandford, B.P.; Smith, S.G.; Wassard, W.R.; Prentice, E.F. In-stream monitoring of PIT-tagged wild spring/summer Chinook Salmon juveniles in Valley Creek, Idaho. Am. Fish. Soc. Symp. 2012, 76, 163–176. [Google Scholar]
- Tenney, J.; Warf, D.; Tancreto, N. Columbia Basin PIT Tag Information System, 1/1/2017–12/31/2017 Annual Report, BPA Project #1990-080-00. Available online: https://www.ptagis.org/docs/default-source/ptagis-program-documents/2017-annual-report-project-1990-080-00.pdf?sfvrsn=2 (accessed on 1 January 2019).
- Ozdenizci, B.; Ok, K.; Coskun, V.; Aydin, M.N. Development of an indoor navigation system using NFC technology. In Proceedings of the 2011 Fourth International Conference on Information and Computing, Phuket Island, Thailand, 25–27 April 2011. [Google Scholar] [CrossRef]
- Alt, F.; Shirazi, A.S.; Kubitza, T.; Schmidt, A. Interaction techniques for creating and exchanging content with public displays. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Paris, France, 27 April–2 May 2013; pp. 1709–1718. [Google Scholar] [CrossRef]
- Liu, Y.; Yang, J.; Liu, M. Recognition of QR code with mobile phones. In Proceedings of the 2008 Chinese Control and Decision Conference, Yantai, China, 2–4 July 2008. [Google Scholar] [CrossRef]
- Lai, Y.; Han, F.; Lai, C.; Yeh, Y.; Szu, Y. A GPS navigation system with QR code decoding and friend positioning in smart phones. In Proceedings of the 2010 2nd International Conference on Education Technology and Computer, Shanghai, China, 22–24 June 2010. [Google Scholar] [CrossRef]
- Costa-Montenegro, E.; González-Castaño, F.J.; Conde-Lagoa, D.; Barragáns-Martínez, A.B.; Rodríguez-Hernádez, P.S.; Gil-Castñeira, F. QR-Maps: An efficient tool for indoor user location based on QR-codes and Google Maps. In Proceedings of the 8th Annual IEEE Consumer Communications and Networking Conference, Las Vegas, NV, USA, 9–12 January 2011. [Google Scholar] [CrossRef]
- Basiri, A.; Amirian, P.; Winstanley, A. The use of Quick Response (QR) codes in landmark-based pedestrian navigation. Int. J. Navig. Obs. 2014, 2014, 897103. [Google Scholar] [CrossRef]
- Knowles, C.; Boston, K.; Beregibar, E. A new method for tagging and tracking logs. Int. For. Rev. 2017, 19, 294–305. [Google Scholar] [CrossRef]
- St. Denis, L.A.; Hughes, A.L.; Palen, L. Trial by fire: The deployment of trusted digital volunteers in the 2011 Shadow Lake Fire. In Proceedings of the 9th International ISCRAM Conference, Vancouver, BC, Canada, 22–25 April 2012; Rothkrantz, L., Ristvej, J., Franco, Z., Eds.; Simon Fraser University: Vancouver, BC, Canada, 2012. [Google Scholar]
- Kim, C.; Hwang, J.N. Fast and automatic video object segmentation and tracking for content-based applications. IEEE Trans. Circuits Syst. Video Technol. 2002, 12, 122–129. [Google Scholar]
- Joshi, K.A.; Thakore, D.G. A survey on moving object detection and tracking in video surveillance system. Int. J. Soft Comput. Eng. 2012, 2, 44–48. [Google Scholar]
- Cavallaro, A.; Ebrahimi, T. Video object extraction based on adaptive background and statistical change detection. Vis. Commun. Image Process. 2001, 4310, 465–476. [Google Scholar] [CrossRef]
- Weng, S.K.; Kuo, C.M.; Tu, S.K. Video object tracking using adaptive Kalman filter. J. Vis. Commun. Image Represent. 2006, 17, 1190–1208. [Google Scholar] [CrossRef]
- Toreyin, B.U.; Cetin, A.E. Wildfire detection using LMS based active learning. In Proceedings of the 2009 IEEE International Conference on Acoustics, Speech and Signal Processing, Taipei, Taiwan, 19–24 April 2009; pp. 1461–1464. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhao, J.; Zhang, D.; Qu, C.; Ke, Y.; Cai, B. Contour based forest fire detection using FFT and wavelet. In Proceedings of the 2008 International Conference on Computer Science and Software Engineering, Wuhan, China, 12–14 December 2008; pp. 760–763. [Google Scholar] [CrossRef]
- Günay, O.; Taşdemir, K.; Töreyin, B.U.; Çetin, A.E. Video based wildfire detection at night. Fire Saf. J. 2009, 44, 860–868. [Google Scholar] [CrossRef] [Green Version]
- Yuan, F. A fast accumulative motion orientation model based on integral image for video smoke detection. Pattern Recognit. Lett. 2008, 29, 925–932. [Google Scholar] [CrossRef]
- Kim, D.; Wang, Y.F. Smoke detection in video. In Proceedings of the 2009 WRI World Congress on Computer Science and Information Engineering, Los Angeles, CA, USA, 31 March–2 April 2009; pp. 759–763. [Google Scholar] [CrossRef]
- Luo, Q.; Han, N.; Kan, J.; Wang, Z. Effective dynamic object detecting for video-based forest fire smog recognition. In Proceedings of the 2009 2nd International Congress on Image and Signal Processing, Tianjin, China, 17–19 October 2009; pp. 1–5. [Google Scholar] [CrossRef]
- Yuan, C.; Liu, Z.; Zhang, Y. UAV-based forest fire detection and tracking using image processing techniques. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems, Denver, CO, USA, 9–12 June 2015; pp. 639–643. [Google Scholar] [CrossRef]
- Keefe, R.F.; Eitel, J.U.H. Applications of carriage-mounted agricultural cameras to improve safety in cable logging operations. In Proceedings of the 2013 Annual Meeting of the Council on Forest Engineering, Missoula, MT, USA, 7–10 July 2013; pp. 7–10. [Google Scholar]
- Hazas, M.; Kray, C.; Gellersen, H.; Agbota, H.; Kortuem, G.; Krohn, A. A relative positioning system for co-located mobile devices. In Proceedings of the 3rd International Conference on Mobile Systems, Applications, and Services (MobiSys’05), Seattle, WA, USA, 6–8 June 2005; pp. 177–190. [Google Scholar] [CrossRef]
- Tournier, G.; Valenti, M.; How, J.; Feron, E. Estimation and control of a quadrotor vehicle using monocular vision and moire patterns. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Keystone, CO, USA, 21–24 August 2006; p. 6711. [Google Scholar] [CrossRef]
- Lugo, J.J.; Zell, A. Framework for autonomous on-board navigation with the AR.Drone. J. Intell. Robot. Syst. 2014, 73, 401–412. [Google Scholar] [CrossRef]
- Saska, M.; Vakula, J.; Přeućil, L. Swarms of micro aerial vehicles stabilized under a visual relative localization. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 3570–3575. [Google Scholar] [CrossRef]
- Basiri, M.; Schill, F.; Lima, P.; Floreano, D. On-board relative bearing estimation for teams of drones using sound. IEEE Robot. Autom. Lett. 2016, 1, 820–827. [Google Scholar] [CrossRef]
- Rao, B.; Minakakis, L. Evolution of mobile location-based services. Commun. ACM 2003, 46, 61–65. [Google Scholar] [CrossRef]
- Küpper, A. Location-based Services: Fundamentals and Operation; John Wiley & Sons, Ltd.: West Sussex, UK, 2005; ISBN 0-470-09231-9. (HB). [Google Scholar]
- Dey, A.; Hightower, J.; de Lara, E.; Davies, N. Location-based services. IEEE Pervasive Comput. 2010, 9, 11–12. [Google Scholar] [CrossRef]
- Barkhuus, L.; Dey, A. Location-based services for mobile telephony: A study of users’ privacy concerns. In Proceedings of the INTERACT 2003 9th IFIP TC13 International Conference on Human-Computer Interaction, Zürich, Switzerland, 1–5 September 2003. [Google Scholar]
- Junglas, I.A.; Watson, R.T. Location-based services. Commun. ACM 2008, 51, 65–69. [Google Scholar] [CrossRef]
- Koühne, M.; Sieck, J. Location-based services with iBeacon technology. In Proceedings of the 2014 2nd International Conference on Artificial Intelligence, Modelling and Simulation, Madrid, Spain, 18–20 November 2014. [Google Scholar] [CrossRef]
- Ghinita, G.; Kalnis, P.; Khoshgozaran, A.; Shahabi, C.; Tan, K. Private queries in location based services: Anonymizers are not necessary. In Proceedings of the 2008 ACM SIGMOD International Conference on Management of Data, Vancouver, BC, Canada, 9–12 June 2008. [Google Scholar] [CrossRef]
- De Longueville, B.; Smith, R.S.; Luraschi, G. “OMG, from here, I can see the flames!”: A use case of mining location based social networks to acquire spatio-temporal data on forest fires. In Proceedings of the 2009 International Workshop on Location Based Social Networks, Seattle, WA, USA, 3 November 2009. [Google Scholar] [CrossRef]
- Kido, H.; Yanagisawa, Y.; Satoh, T. An anonymous communication technique using dummies for location-based services. In Proceedings of the International Conference on Pervasive Services 2005, Santorini, Greece, 11–14 July 2005. [Google Scholar] [CrossRef]
- Reclus, F.; Drouard, K. Geofencing for fleet & freight management. In Proceedings of the 9th International Conference on Intelligent Transport Systems Telecommunications, Lille, France, 20–22 October 2009; pp. 353–356. [Google Scholar] [CrossRef]
- Bareth, U.; Küpper, A.; Ruppel, P. geoXmart—A marketplace for geofence-based mobile services. In Proceedings of the 2010 34th Annual IEEE Computer Software and Applications Conference, Seoul, Korea, 19–23 July 2010; pp. 101–106. [Google Scholar] [CrossRef]
- Liu, S.; Yin, L.; Ho, W.K.; Ling, K.V.; Schiavon, S. A tracking cooling fan using geofence and camera-based indoor localization. Build. Environ. 2017, 114, 36–44. [Google Scholar] [CrossRef] [Green Version]
- Noei, S.; Santana, H.; Sargolzaei, A.; Noei, M. Reducing traffic congestion using geo-fence technology: Application for emergency car. In Proceedings of the 1st International Workshop on Emerging Multimedia Applications and Services for Smart Cities, Orlando, FL, USA, 7 November 2014; pp. 15–20. [Google Scholar] [CrossRef]
- Sheppard, J.K.; McGann, A.; Lanzone, M.; Swaisgood, R.R. An autonomous GPS geofence alert system to curtail avian fatalities at wind farms. Anim. Biotelemetry 2015, 3, 1–8. [Google Scholar] [CrossRef]
- Butler, Z.; Corke, P.; Peterson, R.; Rus, D. From robots to animals: Virtual fences for controlling cattle. Int. J. Rob. Res. 2006, 25, 485–508. [Google Scholar] [CrossRef]
- Anderson, D.M. Virtual fencing—Past, present and future. Rangel. J. 2007, 29, 65–78. [Google Scholar] [CrossRef]
- Umstatter, C. The evolution of virtual fences: A review. Comput. Electron. Agric. 2011, 75, 10–22. [Google Scholar] [CrossRef]
- Jachowski, D.S.; Slotow, R.; Millspaugh, J.J. Good virtual fences make good neighbors: Opportunities for conservation. Anim. Conserv. 2014, 17, 187–196. [Google Scholar] [CrossRef]
- Bishop-Hurley, G.J.; Swain, D.L.; Anderson, D.M.; Sikka, P.; Crossman, C.; Corke, P. Virtual fencing applications: Implementing and testing an automated cattle control system. Comput. Electron. Agric. 2007, 56, 14–22. [Google Scholar] [CrossRef]
- Jouven, M.; Leroy, H.; Ickowicz, A.; Lapeyronie, P. Can virtual fences be used to control grazing sheep? Rangel. J. 2012, 34, 111–123. [Google Scholar] [CrossRef]
- Park, S.; Jayaraman, S. Enhancing quality of life through wearable technology. IEEE Eng. Med. Biol. Mag. 2003, 22, 41–48. [Google Scholar] [CrossRef] [PubMed]
- Bonato, P. Advances in wearable technology and its medical applications. In Proceedings of the 32nd Annual International Conference of the IEEE EMBS, Buenos Aires, Argentina, 31 August–4 September 2010. [Google Scholar] [CrossRef]
- Sultan, N. Reflective thoughts on the potential and challenges of wearable technology for healthcare provision and medical evaluation. Int. J. Inf. Manag. 2015, 35, 521–526. [Google Scholar] [CrossRef]
- Zheng, X.S.; Foucault, C.; Matos da Silva, P.; Dasari, S.; Yang, T.; Goose, S. Eye-wearable technology for machine maintenance: Effects of display position and hands-free operation. In Proceedings of the 33rd Annual ACM Conference on Human Factors in Computing Systems, Seoul, Korea, 18–23 April 2015. [Google Scholar] [CrossRef]
- Bowen, J.; Hinze, A.; Cunningham, S.J.; Parker, R. Evaluation low-cost activity trackers for use in large-scale data gathering of forestry workers. In Proceedings of the Annual Meeting of the Australian Special Interest Group for Computer Human Interaction, Parkville, Australia, 7–10 December 2015; pp. 474–482. [Google Scholar] [CrossRef]
- Bowen, J.; Hinze, A.; Griffiths, C. Investigating real-time monitoring of fatigue indicators of New Zealand forestry workers. Accid. Anal. Prev. 2017. [Google Scholar] [CrossRef]
- Trost, S.G.; Zheng, Y.; Wong, W.K. Machine learning for activity recognition: Hip versus wrist data. Physiol. Meas. 2014, 35, 2183–2189. [Google Scholar] [CrossRef]
- Wang, W.; Liu, A.X.; Shahzad, M.; Ling, K.; Lu, S. Device-free human activity recognition using commercial WiFi devices. IEEE J. Sel. Areas Commun. 2017, 35, 1118–1131. [Google Scholar] [CrossRef]
- Khan, A.M.; Siddiqi, M.H.; Lee, S.W. Exploratory data analysis of acceleration signals to select light-weight and accurate features for real-time activity recognition on smartphones. Sensors 2013, 13, 13099–13122. [Google Scholar] [CrossRef]
- Maurer, U.; Smailagic, A.; Siewiorek, D.P.; Deisher, M. Activity recognition and monitoring using multiple sensors on different body positions. In Proceedings of the International Workshop on Wearable and Implantable Body Sensor Networks (BSN’06), Cambridge, MA, USA, 3–5 April 2006. [Google Scholar]
- Sztyler, T.; Stuckenschmidt, H. On-body localization of wearable devices: An investigation of position-aware activity recognition. In Proceedings of the 2016 IEEE International Conference on Pervasive Computing and Communications (PerCom), Sydney, Australia, 14–19 March 2016. [Google Scholar]
- Bruno, R.; Conti, M.; Gregori, E. Mesh networks: Community multihop ad hoc networks. IEEE Commun. Mag. 2005, 43, 123–131. [Google Scholar] [CrossRef]
- Yarali, A.; Ahsant, B.; Rahman, S. Wireless mesh networking: A key solution for emergency & rural applications. In Proceedings of the 2009 Second International Conference on Advances in Mesh Networks, Athens/Glyfada, Greece, 18–23 June 2009; pp. 143–149. [Google Scholar] [CrossRef]
- Manoj, B.S.; Rao, R.R. Mesh Networks: Issues and Solutions. In Wireless Mesh Networking: Architectures, Protocols and Standards; Zhang, Y., Luo, J., Hu, H., Eds.; Auerbach Publications Taylor & Francis Group: Boca Raton, FL, USA, 2007; pp. 3–110. [Google Scholar]
- Yarali, A. Wireless mesh networking technology for commercial and industrial customers. In Proceedings of the 2008 Canadian Conference on Electrical and Computer Engineering, Niagara Falls, ON, Canada, 4–7 May 2008. [Google Scholar] [CrossRef]
- Liu, Y.; Zhou, G.; Zhao, J.; Dai, G.; Li, X.; Gu, M.; Ma, H.; Mo, L.; He, Y.; Wang, J.; et al. Long-term large-scale sensing in the forest: Recent advances and future directions of GreenOrbs. Front. Comput. Sci. China 2010, 4, 334–338. [Google Scholar] [CrossRef]
- Zhang, Q.; Li, J.; Rong, J.; Weiheng, X.; Jinping, H. Application of WSN in precision forestry. In Proceedings of the IEEE 2011 10th International Conference on Electronic Measurement & Instruments, Chengdu, China, 16–19 August 2011. [Google Scholar] [CrossRef]
- Holden, Z.A.; Klene, A.E.; Keefe, R.F.; Moisen, G.G. Design and evaluation of an inexpensive radiation shield for monitoring surface air temperatures. Agric. For. Meteorol. 2013, 180, 281–286. [Google Scholar] [CrossRef]
- Yu, L.; Wang, N.; Meng, X. Real-time forest fire detection with wireless sensor networks. In Proceedings of the 2005 International Conference on Wireless Communications, Networking and Mobile Computing, Wuhan, China, 26–27 September 2005. [Google Scholar] [CrossRef]
- Lloret, J.; Garcia, M.; Bri, D.; Sendra, S. A wireless sensor network deployment for rural and forest fire detection and verification. Sensors 2009, 9, 8722–8747. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Li, W.; Yin, Z.; Liu, S.; Guo, X. Forest fire detection system based on wireless sensor network. In Proceedings of the 2009 4th IEEE Conference on Industrial Electronics and Applications, Xi’an, China, 25–27 May 2009. [Google Scholar] [CrossRef]
- Bayo, A.; Antolín, D.; Medrano, N.; Calvo, B.; Celma, S. Early detection and monitoring of forest fire with a wireless sensor network system. Procedia Eng. 2010, 5, 248–251. [Google Scholar] [CrossRef] [Green Version]
- Hefeeda, M.; Bagheri, M. Wireless sensor networks for early detection of forest fires. In Proceedings of the 2007 IEEE International Conference on Mobile Adhoc and Sensor Systems, Pisa, Italy, 8–11 October 2007. [Google Scholar] [CrossRef]
- Aslan, Y.E.; Korpeoglu, I.; Ulusoy, O. A framework for use of wireless sensor networks in forest fire detection and monitoring. Comput. Environ. Urban Syst. 2012, 36, 614–625. [Google Scholar] [CrossRef]
- Al-Fuqaha, A.; Guizani, M.; Mohammadi, M.; Aledhari, M.; Ayyash, M. Internet of things: A survey on enabling technologies, protocols, and applications. IEEE Commun. Surv. Tutor. 2015, 17, 2347–2376. [Google Scholar] [CrossRef]
- Atzori, L.; Iera, A.; Morabito, G. The Internet of things: A survey. Comput. Netw. 2010, 54, 2787–2805. [Google Scholar] [CrossRef]
- Gubbi, J.; Buyya, R.; Marusic, S.; Palaniswami, M. Internet of things (IoT): A vision, architectural elements, and future directions. Future Gener. Comput. Syst. 2013, 29, 1645–1660. [Google Scholar] [CrossRef]
- Madakam, S.; Ramaswamy, R.; Tripathi, S. Internet of Things (IoT): A literature review. J. Comput. Commun. 2015, 3, 164–173. [Google Scholar] [CrossRef]
- Miorandi, D.; Sicari, S.; De Pellegrini, F.; Chlamtac, I. Internet of things: Vision, applications and research challenges. Ad Hoc Netw. 2012, 10, 497–1516. [Google Scholar] [CrossRef]
- Gupta, H.; Dastjerdi, A.V.; Ghosh, S.K.; Buyya, R. iFogSim: A toolkit for modeling and simulation of resource management techniques in the Internet of Things, edge and fog computing environments. Softw. Pract. Exp. 2017, 47, 1275–1296. [Google Scholar] [CrossRef]
- Sarkar, S.; Chatterjee, S.; Misra, S. Assessment of the suitability of fog computing in the context of Internet of Things. IEEE Trans. Cloud Comput. 2018, 6, 46–59. [Google Scholar] [CrossRef]
- Kaisler, S.; Armour, F.; Espinosa, J.A.; Money, W. Big data: Issues and challenges moving forward. In Proceedings of the 2013 46th Hawaii International Conference on System Sciences, Wailea/Maui, HI, USA, 7–10 January 2013. [Google Scholar] [CrossRef]
- Gandomi, A.; Haider, M. Beyond the hype: Big data concepts, methods, and analytics. Int. J. Inf. Manag. 2015, 35, 137–144. [Google Scholar] [CrossRef] [Green Version]
- Wu, X.; Zhu, X.; Wu, G.; Ding, W. Data mining with big data. IEEE Trans. Knowl. Data Eng. 2014, 26, 97–107. [Google Scholar] [CrossRef]
- Maltby, D. Big data analytics. In Proceedings of the 74th Annual Meeting of the Association for Information Science and Technology, New Orleans, LA, USA, 9–13 October 2011. [Google Scholar]
- Kambatla, K.; Kollias, G.; Kumar, V.; Grama, A. Trends in big data analytics. J. Parallel Distrib. Comput. 2014, 74, 2561–2573. [Google Scholar] [CrossRef]
- Kankare, V.; Holopainen, M.; Vastaranta, M.; Liang, X.; Yu, X.; Kaartinen, H.; Kukko, A.; Hyyppä, J. Outlook for the single-tree-level forest inventory in Nordic countries. In The Rise of Big Spatial Data. Lecture Notes in Geoinformation and Cartography; Ivan, I., Singleton, A., Horák, J., Inspektor, T., Eds.; Springer: Cham, Switzerland, 2017; pp. 183–195. ISBN 978-3-319-45122-0. [Google Scholar]
- Holopainen, M.; Vastaranta, M.; Hyyppä, J. Outlook for the next generation’s precision forestry in Finland. Forests 2014, 5, 1682–1694. [Google Scholar] [CrossRef]
- Pierdicca, R.; Liciotti, D.; Contigiani, M.; Frontoni, E.; Mancini, A.; Zingaretti, P. Low cost embedded system for increasing retail environment intelligence. In Proceedings of the 2015 IEEE International Conference on Multimedia & Expo Workshops, Turin, Italy, 29 June–3 July 2015. [Google Scholar] [CrossRef]
- Nguyen, V.M.; Brooks, J.L.; Young, N.; Lennox, R.J.; Haddaway, N.; Whoriskey, F.G.; Harcourt, R.; Cooke, S.J. To share or not to share in the emerging era of big data: Perspectives from fish telemetry researchers on data sharing. Can. J. Fish. Aquat. Sci. 2017, 74, 1260–1274. [Google Scholar] [CrossRef]
- Zhang, H.; Zheng, J.; Dorr, G.; Zhou, H.; Ge, Y. Testing of GPS accuracy for precision forestry applications. Arab. J. Sci. Eng. 2014, 39, 237–245. [Google Scholar] [CrossRef]
- Danskin, S.D.; Bettinger, P.; Jordan, T.R.; Cieszewski, C. A comparison of GPS performance in a southern hardwood forest: Exploring low-cost solutions for forestry applications. South. J. Appl. For. 2009, 33, 9–16. [Google Scholar] [CrossRef]
- Hasegawa, H.; Yoshimura, T. Estimation of GPS positional accuracy under different forest conditions using signal interruption probability. J. For. Res. 2007, 12, 1–7. [Google Scholar] [CrossRef]
- Wing, M.G.; Eklund, A. Performance comparison of a low-cost mapping grade global positioning systems (GPS) receiver and consumer grade GPS receiver under dense forest canopy. J. For. 2007, 105, 9–14. [Google Scholar] [CrossRef]
- Yoshimura, T.; Hasegawa, H. Comparing the precision and accuracy of GPS positioning in forested areas. J. For. Res. 2003, 8, 147–152. [Google Scholar] [CrossRef]
- Deckert, C.; Bolstad, P.V. Forest canopy, terrain and distance effects on Global Positioning System point accuracy. Photogramm. Eng. Remote Sens. 1996, 62, 317–321. [Google Scholar]
- Meng, Y.S.; Lee, Y.H.; Ng, B.C. Study of propagation loss prediction in forest environment. Prog. Electromagn. Res. B PIER B 2009, 17, 117–133. [Google Scholar] [CrossRef]
- Higgins, J.P. Smartphone applications for patients’ health and fitness. Am. J. Med. 2016, 129, 11–19. [Google Scholar] [CrossRef] [PubMed]
- Piwek, L.; Ellis, D.A.; Andrews, S.; Joinson, A. The rise of consumer health wearables: Promises and barriers. PLoS Med. 2016, 13, e1001953. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Wang, Y.; Wei, C.; Yao, N.; Yuan, A.; Shan, Y.; Yuan, C. Smartphone interventions for long-term health management of chronic diseases: An integrative review. Telemed. E-Health 2014, 20, 570–583. [Google Scholar] [CrossRef]
- Holzman, D.C. What’s in a color? The unique human health effects of blue light. Environ. Health Perspect. 2010, A22–A27. [Google Scholar] [CrossRef]
- Wu, T.; Rappaport, T.S.; Collins, C.M. The human body and millimeter-wave wireless communication systems: Interactions and implications. In Proceedings of the 2015 IEEE International Conference on Communications, London, UK, 8–12 June 2015; pp. 2423–2429. [Google Scholar] [CrossRef]
- Aljomaa, S.S.; Qudah, M.F.A.; Albursan, I.S.; Bakhiet, S.F.; Abduljabbar, A.S. Smartphone addiction among university students in the light of some variables. Comput. Hum. Behav. 2016, 61, 155–164. [Google Scholar] [CrossRef]
- Elhai, J.D.; Levine, J.C.; Dvorak, R.D.; Hall, B.J. Non-social features of smartphone use are most related to depression, anxiety and problematic smartphone use. Comput. Hum. Behav. 2017, 69, 75–82. [Google Scholar] [CrossRef]
- Lee, M.; Yunkung, H.; Seunghoon, L.; Jinyoung, W.; Jinjun, Y.; Sookyoung, P.; Kyu-Taie, C.; Yonggeun, H. The effects of smartphone use on upper extremity muscle activity and pain threshold. J. Phys. Ther. Sci. 2015, 27, 1743–1745. [Google Scholar] [CrossRef] [Green Version]
- Raij, A.; Gnosh, A.; Kumar, S.; Srivastava, M. Privacy risks emerging from the adoption of innocuous wearable sensors in the mobile environment. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Vancouver, BC, Canada, 7–12 May 2011; pp. 11–20. [Google Scholar] [CrossRef]
- Kelly, P.; Marshall, S.J.; Badland, H.; Kerr, J.; Oliver, M.; Doherty, A.R.; Foster, C. An ethical framework for automated, wearable cameras in health behavior research. Am. J. Prev. Med. 2013, 44, 314–319. [Google Scholar] [CrossRef]
- Thierer, A.D. The internet of things and wearable technology: Addressing privacy and security concerns without derailing innovation. Richmond J. Law Technol. 2015, 21, 1–118. [Google Scholar] [CrossRef]
- Bowen, J.; Hinze, A.; Griffiths, C.; Kumar, V.; Bainbridge, D. Personal data collection in the workplace: Ethical and technical challenges. In Proceedings of the 31st British Computer Society Human Computer Interaction Conference, Sunderland, UK, 3–6 July 2017. [Google Scholar] [CrossRef]
- Dudhane, N.A.; Pitambare, S.T. Location based and contextual services using Bluetooth beacons: New way to enhance customer experience. Lect. Notes Inf. Theory 2015, 3, 31–34. [Google Scholar] [CrossRef]
















| Method | Range | Static Position Accuracy 1 | Technology | Reference |
|---|---|---|---|---|
| Single User | ||||
| GNSS | Global | 1–2 m (5–10 m canopy) | Recreational & mapping grade | [29] |
| RTK-GNSS | Global | 5 cm (1 m canopy) | Survey grade | [29] |
| PPP-GNSS | Global | < 5 cm (> 0.5 m canopy) | Survey grade | [67,70] |
| GNSS-INS | Global | GNSS/INS: 0.5–1 m PPP/INS: 5–10 cm | Tightly-coupled systems 2 | [103,104,105,106] |
| Multi-node3 | ||||
| GNSS-RF | Line-of-sight | 2–4 m (< 10 m canopy) | Recreational grade – U.S. GPS only | [21] |
| UWB | 100 m (15 m NLOS) | 3 cm–0.5 m (1 m NLOS) | Commercial grade | [77,95,96] |
| Bluetooth | up to 50 m up to 100 m (20 m indoors) up to 200 m (40 m indoors) | 2–5 m (BLE, indoor) | BLE Bluetooth 4.x Bluetooth 5.0 | [117,118] |
| RFID | Up to 1 km | < 20 cm–5 m | Active UHF RFID (RSS) | [77,126,127,128,129] |
| QR code | Global | Same as GNSS | GNSS | [29] |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Keefe, R.F.; Wempe, A.M.; Becker, R.M.; Zimbelman, E.G.; Nagler, E.S.; Gilbert, S.L.; Caudill, C.C. Positioning Methods and the Use of Location and Activity Data in Forests. Forests 2019, 10, 458. https://doi.org/10.3390/f10050458
Keefe RF, Wempe AM, Becker RM, Zimbelman EG, Nagler ES, Gilbert SL, Caudill CC. Positioning Methods and the Use of Location and Activity Data in Forests. Forests. 2019; 10(5):458. https://doi.org/10.3390/f10050458
Chicago/Turabian StyleKeefe, Robert F., Ann M. Wempe, Ryer M. Becker, Eloise G. Zimbelman, Emily S. Nagler, Sophie L. Gilbert, and Christopher C. Caudill. 2019. "Positioning Methods and the Use of Location and Activity Data in Forests" Forests 10, no. 5: 458. https://doi.org/10.3390/f10050458
APA StyleKeefe, R. F., Wempe, A. M., Becker, R. M., Zimbelman, E. G., Nagler, E. S., Gilbert, S. L., & Caudill, C. C. (2019). Positioning Methods and the Use of Location and Activity Data in Forests. Forests, 10(5), 458. https://doi.org/10.3390/f10050458