Estimation of Tree Height by Combining Low Density Airborne LiDAR Data and Images Using the 3D Tree Model: A Case Study in a Subtropical Forest in China


Abstract
:1. Introduction
2. Test Area and Data
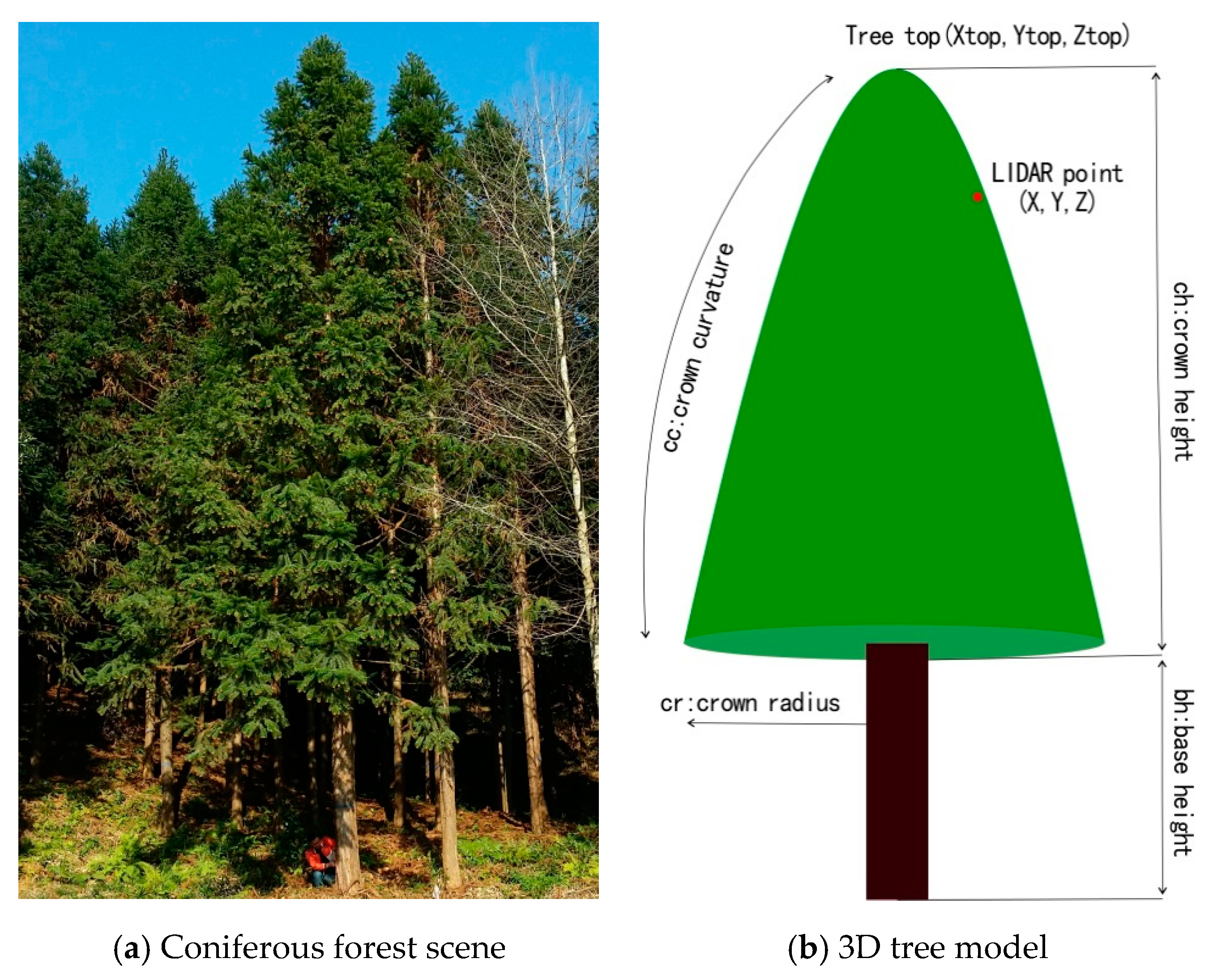
2.1. Test Area
2.2. Test Data
3. Methods
3.1. 3D Parameter Model of Trees
3.2. Parameter Estimation of the 3D Tree Model
3.2.1. Preprocessing of LiDAR Data and Images
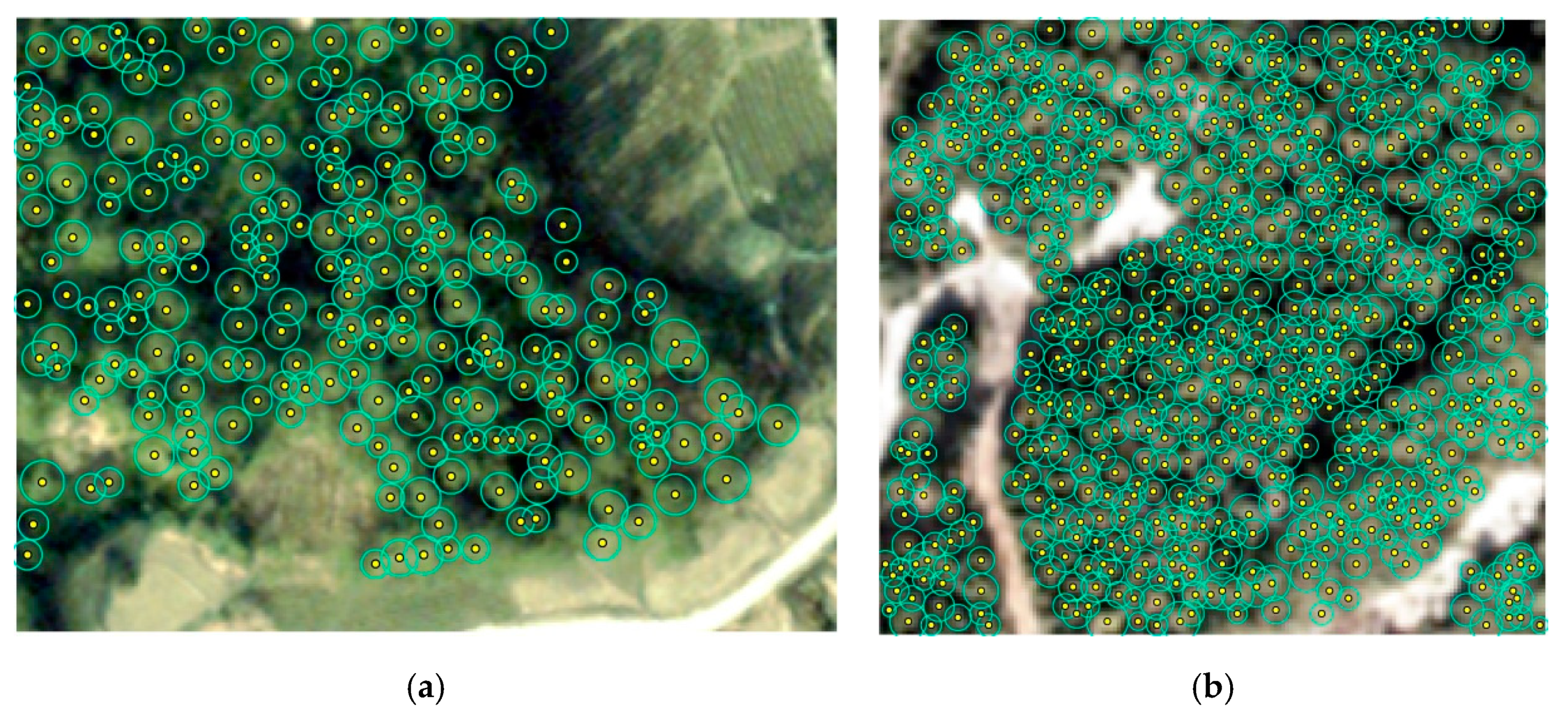
3.2.2. Tree Crown Segmentation from the Aerial Image
3.2.3. Detection of Crown Apex
3.2.4. Crown Diameter
3.3. Estimation of Tree Top Height
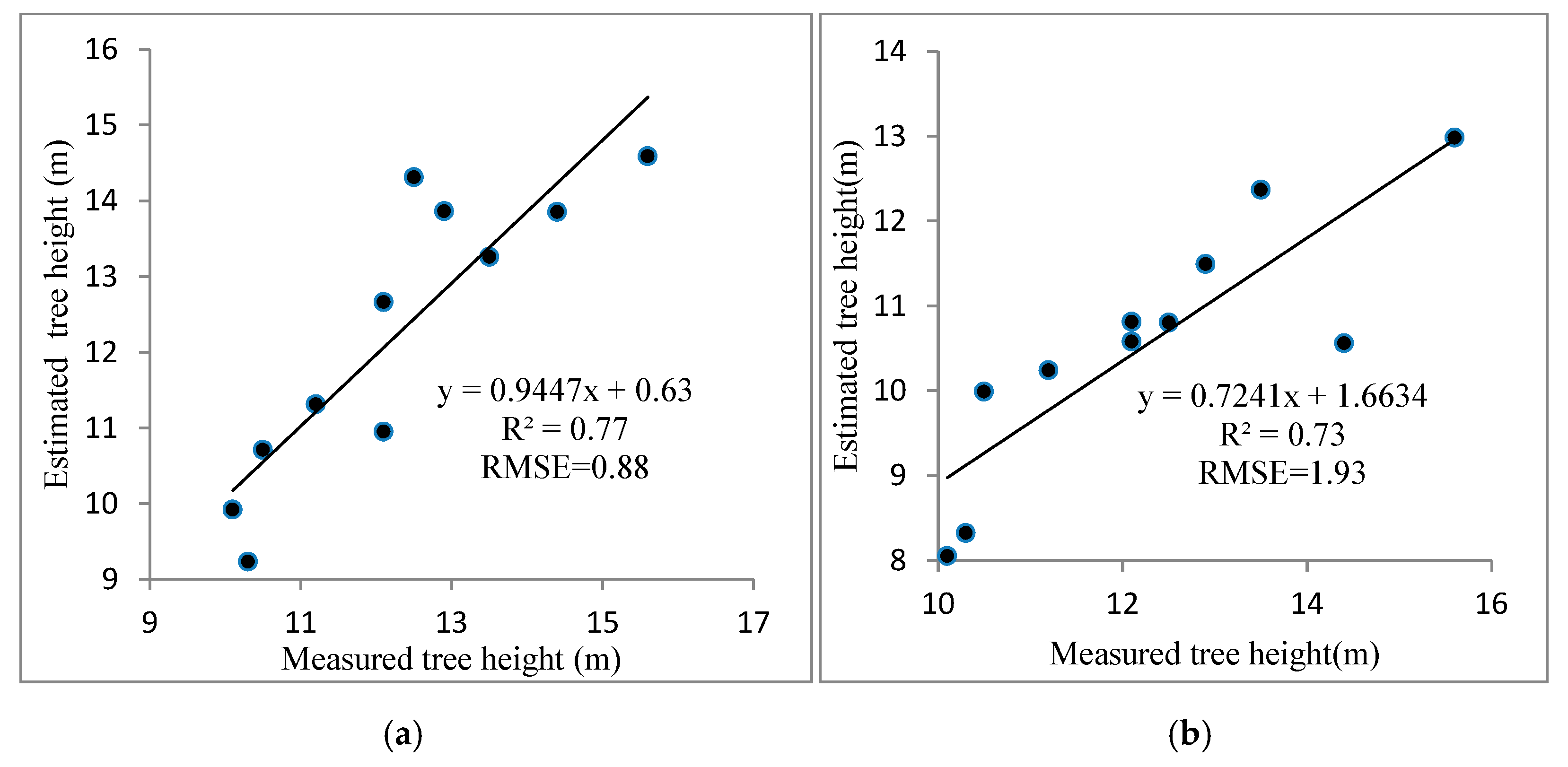
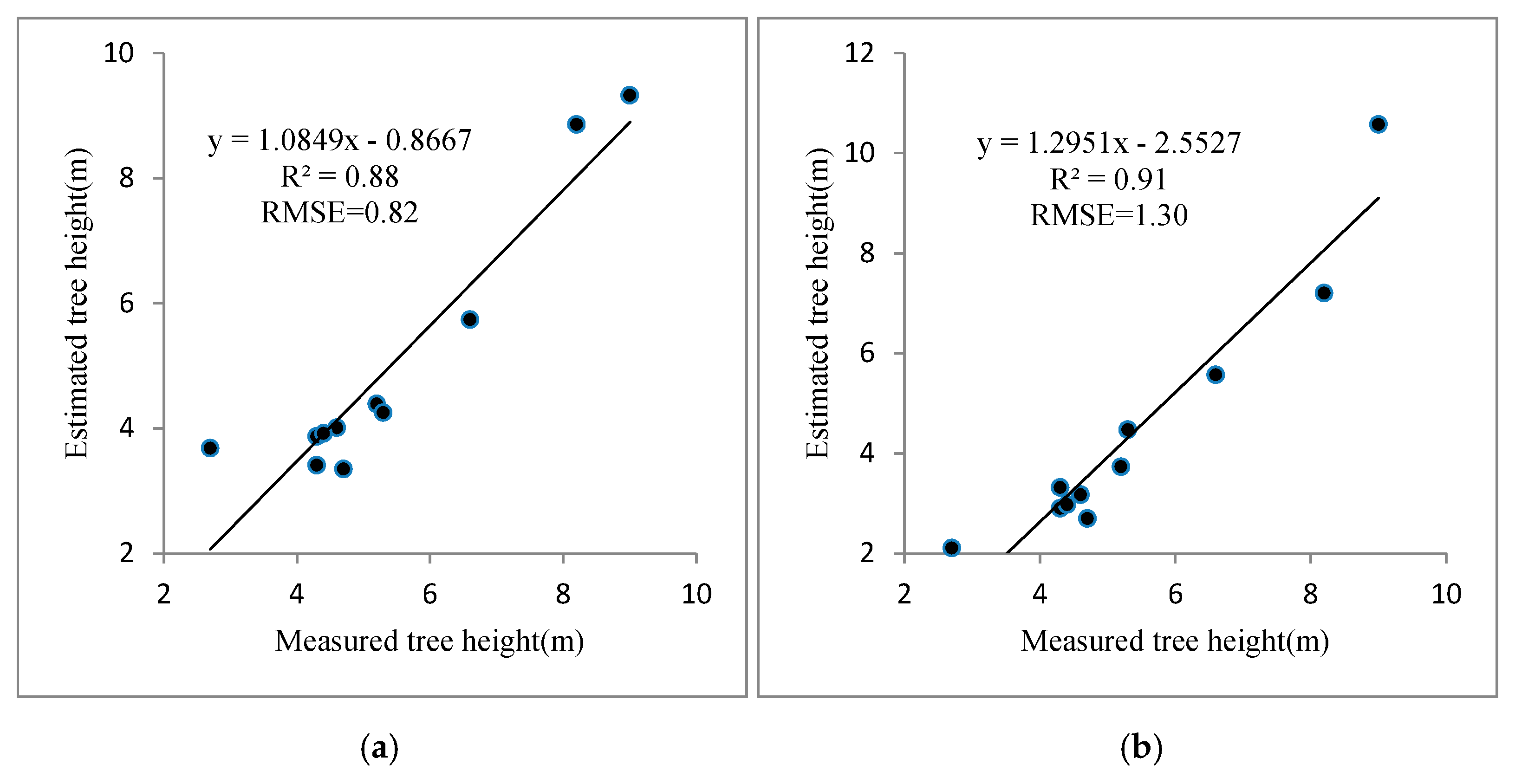
4. Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kwong, I.H.Y.; Fung, T. Tree height mapping and crown delineation using LiDAR, large format aerial photographs, and unmanned aerial vehicle photogrammetry in subtropical urban forest. Int. J. Remote Sens. 2020, 41, 5228–5256. [Google Scholar] [CrossRef]
- Ferraz, A.; Saatchi, S.; Keller, M.; Longo, M.; Ometto, J.P. Lidar tree crown detection reveals new patterns of tree density, height and volume in the Brazilian Amazon. AGUFM 2019, 2019, B23E. [Google Scholar]
- Budei, B.C.; St-Onge, B. Variability of Multispectral Lidar 3D and Intensity Features with Individual Tree Height and Its Influence on Needleleaf Tree Species Identification. Can. J. Remote Sens. 2018, 44, 263–286. [Google Scholar] [CrossRef]
- Ojoatre, S.; Zhang, C.; Hussin, Y.A.; Kloosterman, H.E.; Ismail, M.H. Assessing the Uncertainty of Tree Height and Aboveground Biomass from Terrestrial Laser Scanner and Hypsometer Using Airborne LiDAR Data in Tropical Rainforests. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 4149–4159. [Google Scholar] [CrossRef]
- Hernandez-Serna, A.; Hansen, M.; Potapov, P.; Zalles, V. Monitoring tree height, loss, and gain in South America using Lidar and Landsat data for 1985–2018. AGUFM 2019, 2019, B11F-2384. [Google Scholar]
- Bignell, G.; Mulo, S. Using LIDAR to Measure the Impact of Tree Height on Yield and Kernel Recovery in Mature Macadamia Orchards. Project Report. Queensland Government. AU; 2018. Available online: http://era.daf.qld.gov.au/id/eprint/6390/ (accessed on 1 September 2020).
- Andersen, H.; Reutebuch, S.E.; McGaughey, R.J. A rigorous assessment of tree height measurements obtained using airborne lidar and conventional field methods. Can. J. Remote Sens. 2006, 32, 355–366. [Google Scholar] [CrossRef]
- Itakura, K.; Kamakura, I.; Hosoi, F. Calculation of moving distance when measuring tree height using portable scanning lidar and tree height measurement by using registration of images obtained on the ground and high places. Eco-Engineering 2018, 30, 7–14. [Google Scholar]
- Mutwiri, F.K.; Odera, P.A.; Kinyanjui, M.J. Estimation of Tree Height and Forest Biomass Using Airborne LiDAR Data: A Case Study of Londiani Forest Block in the Mau Complex, Kenya. Open J. For. 2017, 7, 255–269. [Google Scholar] [CrossRef] [Green Version]
- Ivanovs, J.; Lazdins, A. Evaluation of tree height and number of trees using LiDAR data. Eng. Rural Dev. 2018, 153, 1390–1394. [Google Scholar]
- Chen, Q.; Baldocchi, D.; Gong, P.; Kelly, M. Isolating individual trees in a savanna woodland using small footprint lidar data. Photogramm. Eng. Remote Sens. 2006, 72, 923–932. [Google Scholar] [CrossRef] [Green Version]
- Dalla Corte, A.P.; Rex, F.E.; Almeida, D.R.A.D.; Sanquetta, C.R.; Silva, C.A.; Moura, M.M.; Wilkinson, B.; Zambrano, A.M.A.; Cunha Neto, E.M.D.; Veras, H.F. Measuring individual tree diameter and height using GatorEye High-Density UAV-Lidar in an integrated crop-livestock-forest system. Remote Sens. 2020, 12, 863. [Google Scholar] [CrossRef] [Green Version]
- Wanik, D.; Parent, J.; Anagnostou, E.; Hartman, B. Using vegetation management and LiDAR-derived tree height data to improve outage predictions for electric utilities. Electr. Pow. Syst. Res. 2017, 146, 236–245. [Google Scholar] [CrossRef]
- Silva, C.A.; Klauberg, C.; Hudak, A.T.; Vierling, L.A.; Liesenberg, V.; Bernett, L.G.; Scheraiber, C.F.; Schoeninger, E.R. Estimating Stand Height and Tree Density in Pinus taeda plantations using in-situ data, airborne LiDAR and k-Nearest Neighbor Imputation. Anais da Academia Brasileira de Ciências 2018, 90, 295–309. [Google Scholar] [CrossRef] [PubMed]
- Hyyppä, J.; Yu, X.; Hyyppä, H.; Vastaranta, M.; Holopainen, M.; Kukko, A.; Kaartinen, H.; Jaakkola, A.; Vaaja, M.; Koskinen, J. Advances in forest inventory using airborne laser scanning. Remote Sens. 2012, 4, 1190–1207. [Google Scholar] [CrossRef] [Green Version]
- Zolkos, S.; Goetz, S.; Dubayah, R. A meta-analysis of terrestrial aboveground biomass estimation using lidar remote sensing. Remote Sens. Environ. 2013, 128, 289–298. [Google Scholar] [CrossRef]
- Estornell, J.; Velázquez-Martí, B.; López-Cortés, I.; Salazar, D.; Fernández-Sarría, A. Estimation of wood volume and height of olive tree plantations using airborne discrete-return LiDAR data. Gisci. Remote Sens. 2014, 51, 17–29. [Google Scholar] [CrossRef]
- Staben, G.; Lucieer, A.; Scarth, P. Modelling LiDAR derived tree canopy height from Landsat TM, ETM+ and OLI satellite imagery—A machine learning approach. Int. J. Appl. Earth Obs. 2018, 73, 666–681. [Google Scholar] [CrossRef]
- Mielcarek, M.; Stereńczak, K.; Khosravipour, A. Testing and evaluating different LiDAR-derived canopy height model generation methods for tree height estimation. Int. J. Appl. Earth Obs. 2018, 71, 132–143. [Google Scholar] [CrossRef]
- Koukoulas, S.; Blackburn, G.A. Mapping individual tree location, height and species in broadleaved deciduous forest using airborne LIDAR and multi-spectral remotely sensed data. Int. J. Remote Sens. 2005, 26, 431–455. [Google Scholar] [CrossRef]
- Mora, B.; Wulder, M.A.; White, J.C.; Hobart, G. Modeling stand height, volume, and biomass from very high spatial resolution satellite imagery and samples of airborne LiDAR. Remote Sens. 2013, 5, 2308–2326. [Google Scholar] [CrossRef] [Green Version]
- Su, Y.; Ma, Q.; Guo, Q. Fine-resolution forest tree height estimation across the Sierra Nevada through the integration of spaceborne LiDAR, airborne LiDAR, and optical imagery. Int. J. Digit. Earth 2017, 10, 307–323. [Google Scholar] [CrossRef]
- Arumäe, T.; Lang, M.; Laarmann, D. Thinning-and tree-growth-caused changes in canopy cover and stand height and their estimation using low-density bitemporal airborne lidar measurements–a case study in hemi-boreal forests. Eur. J. Remote Sens. 2020, 53, 113–123. [Google Scholar] [CrossRef] [Green Version]
- Suárez, J.C.; Ontiveros, C.; Smith, S.; Snape, S. Use of airborne LiDAR and aerial photography in the estimation of individual tree heights in forestry. Comput. Geosci. 2005, 31, 253–262. [Google Scholar] [CrossRef]
- Ferraz, A.; Saatchi, S.; Mallet, C.; Meyer, V. Lidar detection of individual tree size in tropical forests. Remote Sens. Environ. 2016, 183, 318–333. [Google Scholar] [CrossRef]
- Morsdorf, F.; Meier, E.; Kötz, B.; Itten, K.I.; Dobbertin, M.; Allgöwer, B. LIDAR-based geometric reconstruction of boreal type forest stands at single tree level for forest and wildland fire management. Remote Sens. Environ. 2004, 92, 353–362. [Google Scholar] [CrossRef]
- Paris, C.; Bruzzone, L. A Three-Dimensional Model-Based Approach to the Estimation of the Tree Top Height by Fusing Low-Density LiDAR Data and Very High Resolution Optical Images. IEEE Trans. Geosci. Remote 2015, 53, 467–480. [Google Scholar] [CrossRef]
- Alexander, C.; Korstjens, A.H.; Hill, R.A. Influence of micro-topography and crown characteristics on tree height estimations in tropical forests based on LiDAR canopy height models. Int. J. Appl. Earth Obs. 2018, 65, 105–113. [Google Scholar] [CrossRef]
- Moe, K.; Owari, T.; Furuya, N.; Hiroshima, T. Comparing Individual Tree Height Information Derived from Field Surveys, LiDAR and UAV-DAP for High-Value Timber Species in Northern Japan. Forests 2020, 11, 223. [Google Scholar] [CrossRef] [Green Version]
- Meng, Q.; Chen, X.; Zhang, J.; Sun, Y.; Li, J.; Jancsó, T.; Sun, Z. Canopy structure attributes extraction from LiDAR data based on tree morphology and crown height proportion. J. Indian Soc. Remote 2018, 46, 1433–1444. [Google Scholar] [CrossRef]
- Pollock, R. The Automatic Recognition of Individual Trees in Aerial Images of Forests Based on a Synthetic Tree Crown Image Model. Ph.D. Thesis, University of British Columbia, Vancouver, BC, Canada, 1996. [Google Scholar]
- Gong, P.; Sheng, Y.; Biging, G.S. 3D Model-Based Tree Measurement from High-Resolution Aerial Imagery. Photogramm. Eng. Remote Sens. 2002, 68, 1203–1212. [Google Scholar]
- Zhao, X.; Guo, Q.; Su, Y.; Xue, B. Improved progressive TIN densification filtering algorithm for airborne LiDAR data in forested areas. ISPRS J. Photogramm. 2016, 117, 79–91. [Google Scholar] [CrossRef] [Green Version]
- Gillan, J.K.; Karl, J.W.; Duniway, M.; Elaksher, A. Modeling vegetation heights from high resolution stereo aerial photography: An application for broad-scale rangeland monitoring. J. Environ. Manag. 2014, 144, 226–235. [Google Scholar] [CrossRef] [PubMed]
- Zarco-Tejada, P.J.; Diaz-Varela, R.; Angileri, V.; Loudjani, P. Tree height quantification using very high resolution imagery acquired from an unmanned aerial vehicle (UAV) and automatic 3D photo-reconstruction methods. Eur. J. Agron. 2014, 55, 89–99. [Google Scholar] [CrossRef]
- Wang, L.P.G.A. Individual Tree-Crown Delineation and Treetop Detection in High-Spatial-Resolution Aerial Imagery. Photogramm. Eng. Remote Sens. 2004, 70, 351–357. [Google Scholar] [CrossRef] [Green Version]
- Beucher, S.; Meyer, F. Segmentation: The Watershed Transformation. Mathematical Morphology in Image Processing. Opt. Eng. 1993, 34, 433–481. [Google Scholar]
- Ali, S.S.; Dare, P.; Jones, S.D. Fusion of remotely sensed multispectral imagery and Lidar data for forest structure assessment at the tree level. ISPRS Proc. Beijing 2008, 37, B7. [Google Scholar]
- Kim, E.; Woo-Kyun, L.; Yoon, M.; Lee, J.; Lee, E.J.; Moon, J. Detecting individual tree position and height using Airborne LiDAR data in Chollipo Arboretum, South Korea. Terr. Atmos. Ocean. Sci. 2016, 27, 593. [Google Scholar] [CrossRef] [Green Version]
- Kim, D.; Choi, Y.; Lee, G.; Cho, G. Extracting Individual Number and Height of Tree using Airborne LiDAR Dataa. J. Cadastre Land InformatiX 2016, 46, 87–100. [Google Scholar]
- Wulder, M.; Niemann, K.O.; Goodenough, D.G. Local Maximum Filtering for the Extraction of Tree Locations and Basal Area from High Spatial Resolution Imagery. Remote Sens. Environ. 2000, 73, 103–114. [Google Scholar] [CrossRef]
- Gebreslasie, M.T.; Ahmed, F.B.; Van Aardt, J.A.N.; Blakeway, F. Individual tree detection based on variable and fixed window size local maxima filtering applied to IKONOS imagery for even-aged Eucalyptus plantation forests. Int. J. Remote Sens. 2011, 32, 4141–4154. [Google Scholar] [CrossRef]
- Popescu, S.C.; Wynne, R.H.; Nelson, R.F. Measuring individual tree crown diameter with lidar and assessing its influence on estimating forest volume and biomass. Can. J. Remote Sens. 2003, 29, 564–577. [Google Scholar] [CrossRef]
- Panagiotidis, D.; Abdollahnejad, A.; Surový, P.; Chiteculo, V. Determining tree height and crown diameter from high-resolution UAV imagery. Int. J. Remote Sens. 2017, 38, 2392–2410. [Google Scholar] [CrossRef]
- Ganz, S.; Käber, Y.; Adler, P. Measuring Tree Height with Remote Sensing—A Comparison of Photogrammetric and LiDAR Data with Different Field Measurements. Forests 2019, 10, 694. [Google Scholar] [CrossRef] [Green Version]
- Okojie, J.A.; Okojie, L.O.; Effiom, A.E.; Odia, B.E. Relative canopy height modelling precision from UAV and ALS datasets for forest tree height estimation. Remote Sens. Appl. Soc. Environ. 2020, 17, 100284. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Plot | Area | Number of Tree | Altitude | Canopy Density | Crown Diameter Range | Tree Height Range | Slope |
|---|---|---|---|---|---|---|---|
| Plot 1 | 1.4 ha | 420 | 322 m | 0.8 | 2.1–4.3 | 3 m~17 m | 13° |
| Plot 2 | 0.73 ha | 654 | 374 m | 0.7 | 1.1–2.7 | 3 m~13 m | 31° |
| Tree Code | HF | H3D | 3DE | AC_H3D | HL | LE | AC_HL |
|---|---|---|---|---|---|---|---|
| 1 | 15.6 | 14.59 | −1.01 | 93.52% | 12.98 | −2.62 | 83.20% |
| 2 | 12.9 | 13.86 | 0.96 | 92.55% | 11.49 | −1.41 | 89.07% |
| 3 | 14.4 | 13.85 | −0.55 | 96.18% | 10.56 | −3.84 | 73.33% |
| 4 | 13.5 | 13.26 | −0.24 | 98.22% | 12.37 | −1.13 | 91.63% |
| 5 | 12.5 | 14.31 | 1.81 | 85.52% | 10.80 | −1.7 | 86.40% |
| 6 | 11.2 | 11.31 | 0.11 | 99.02% | 10.24 | −0.96 | 91.43% |
| 7 | 12.1 | 12.66 | 0.56 | 95.37% | 10.81 | −1.29 | 89.34% |
| 8 | 10.5 | 10.71 | 0.21 | 98.00% | 9.99 | −0.51 | 95.14% |
| 9 | 10.1 | 9.92 | −0.18 | 98.22% | 8.05 | −2.05 | 79.70% |
| 10 | 10.3 | 9.23 | −1.07 | 89.61% | 8.32 | −1.98 | 80.77% |
| 11 | 12.1 | 10.95 | −1.15 | 90.49% | 10.58 | −1.52 | 87.44% |
| Average | 12.29 | 12.24 | 0.71 | 94.25% | 10.56 | 1.72 | 86.13% |
| Tree Code | HF | H3D | 3DE | AC_H3D | HL | LE | AC_HL |
|---|---|---|---|---|---|---|---|
| 1 | 9.0 | 9.32 | 0.32 | 96.44% | 10.57 | 1.57 | 82.55% |
| 2 | 4.3 | 3.41 | −0.89 | 79.30% | 3.32 | −0.98 | 77.21% |
| 3 | 8.2 | 8.86 | 0.66 | 91.95% | 7.2 | −1.0 | 87.80% |
| 4 | 4.6 | 4.01 | −0.59 | 87.17% | 3.17 | −1.43 | 68.91% |
| 5 | 5.2 | 4.39 | −0.81 | 84.42% | 3.73 | −1.47 | 71.73% |
| 6 | 4.3 | 3.87 | −0.43 | 90.00% | 2.9 | −1.4 | 67.44% |
| 7 | 4.7 | 3.35 | −1.35 | 71.28% | 2.7 | −2.0 | 57.45% |
| 8 | 6.6 | 5.74 | −0.86 | 86.97% | 5.57 | −1.03 | 84.39% |
| 9 | 5.3 | 4.25 | −1.05 | 80.19% | 4.47 | −0.83 | 84.34% |
| 10 | 2.7 | 3.68 | 0.98 | 63.70% | 2.11 | −0.59 | 78.15% |
| 11 | 4.4 | 3.92 | −0.48 | 89.09% | 2.98 | −1.42 | 67.73% |
| Average | 5.39 | 4.98 | 0.76 | 83.68% | 4.43 | 1.25 | 75.25% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, X.; Wang, W.; Di, L.; Lu, L.; Guo, L. Estimation of Tree Height by Combining Low Density Airborne LiDAR Data and Images Using the 3D Tree Model: A Case Study in a Subtropical Forest in China. Forests 2020, 11, 1252. https://doi.org/10.3390/f11121252
Zhou X, Wang W, Di L, Lu L, Guo L. Estimation of Tree Height by Combining Low Density Airborne LiDAR Data and Images Using the 3D Tree Model: A Case Study in a Subtropical Forest in China. Forests. 2020; 11(12):1252. https://doi.org/10.3390/f11121252
Chicago/Turabian StyleZhou, Xiaocheng, Wenjun Wang, Liping Di, Lin Lu, and Liying Guo. 2020. "Estimation of Tree Height by Combining Low Density Airborne LiDAR Data and Images Using the 3D Tree Model: A Case Study in a Subtropical Forest in China" Forests 11, no. 12: 1252. https://doi.org/10.3390/f11121252
APA StyleZhou, X., Wang, W., Di, L., Lu, L., & Guo, L. (2020). Estimation of Tree Height by Combining Low Density Airborne LiDAR Data and Images Using the 3D Tree Model: A Case Study in a Subtropical Forest in China. Forests, 11(12), 1252. https://doi.org/10.3390/f11121252