Hierarchical Geographic Object-Based Vegetation Type Extraction Based on Multi-Source Remote Sensing Data

Abstract
:1. Introduction
2. Materials and Methods
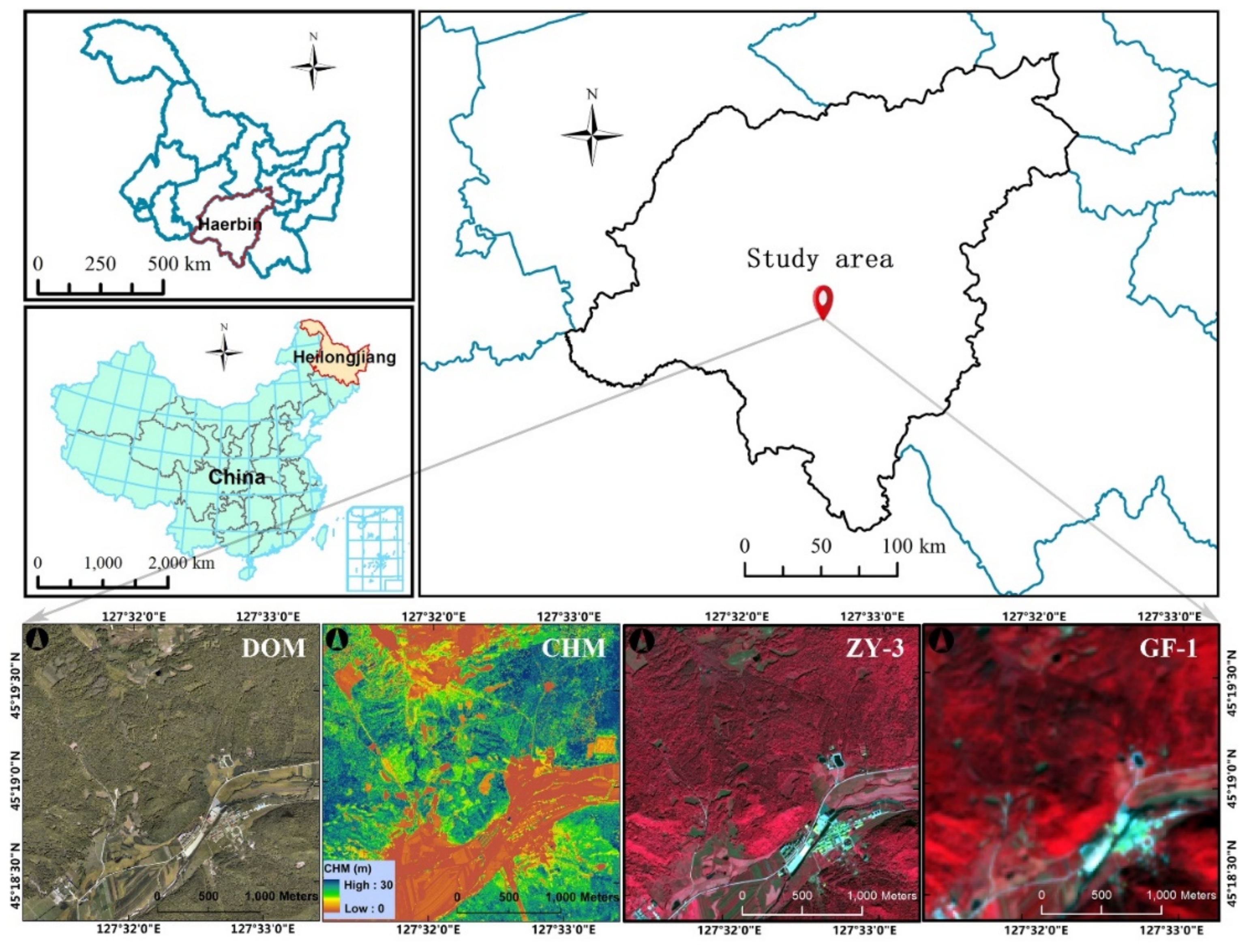
2.1. Study Area
2.2. Remote Sensing Data
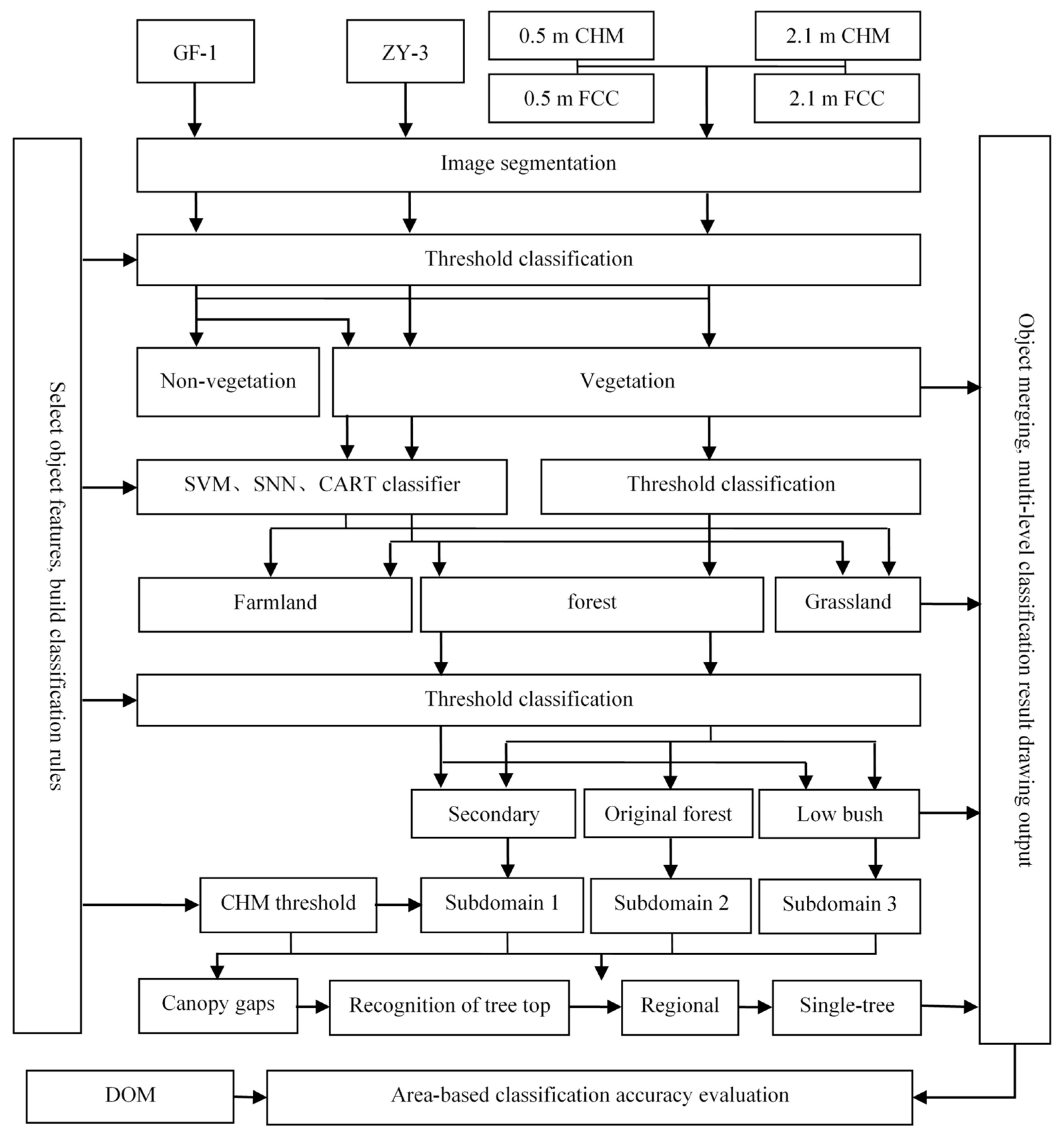
2.3. Methods
2.4. Vegetation and Non-Vegetation Separation
2.5. Vegetation Type Distinction
2.6. Forest Type Distinction
2.7. Canopy and Canopy Gap Extraction
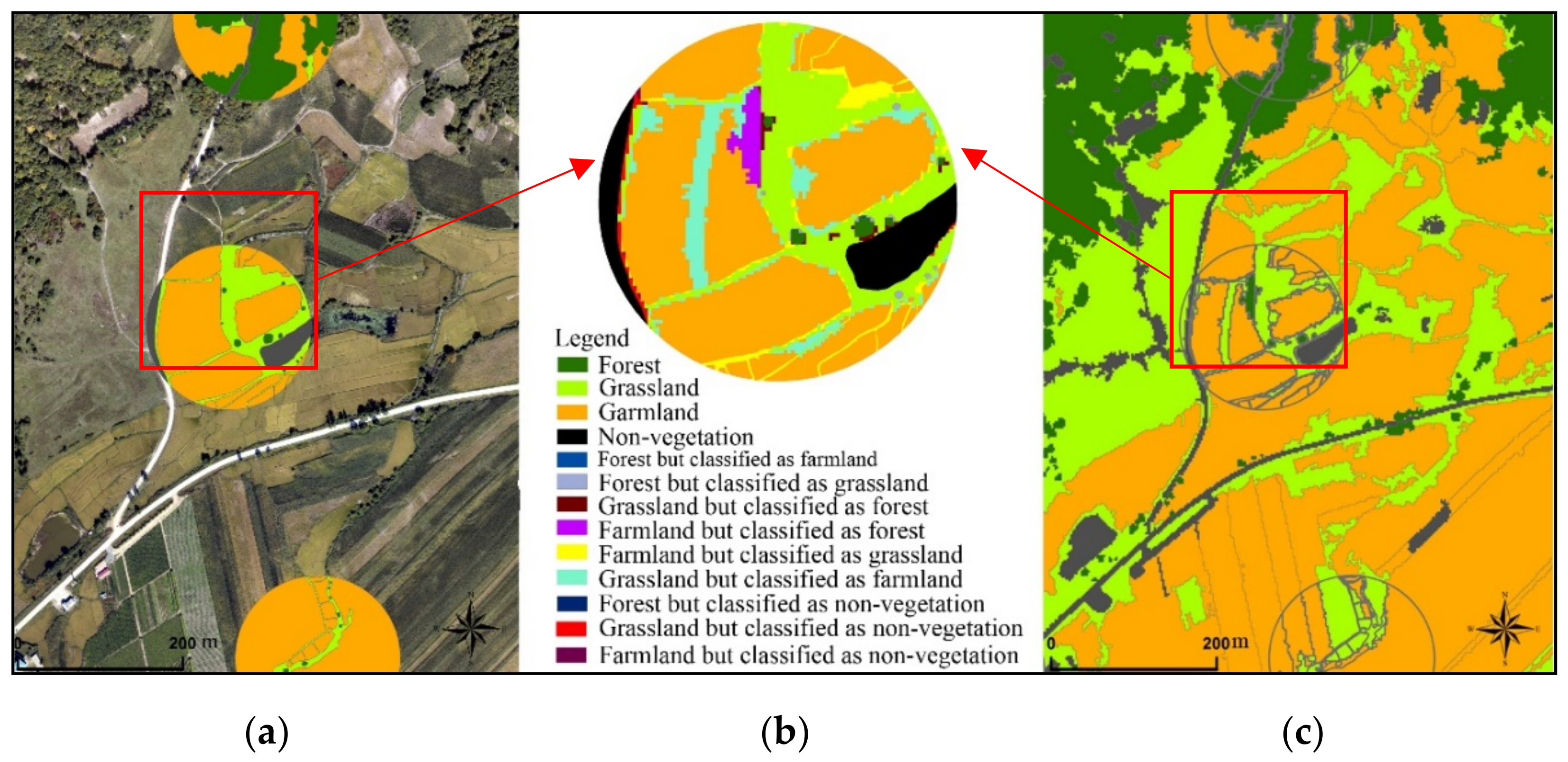
2.8. Classification Accuracy Evaluation
3. Results
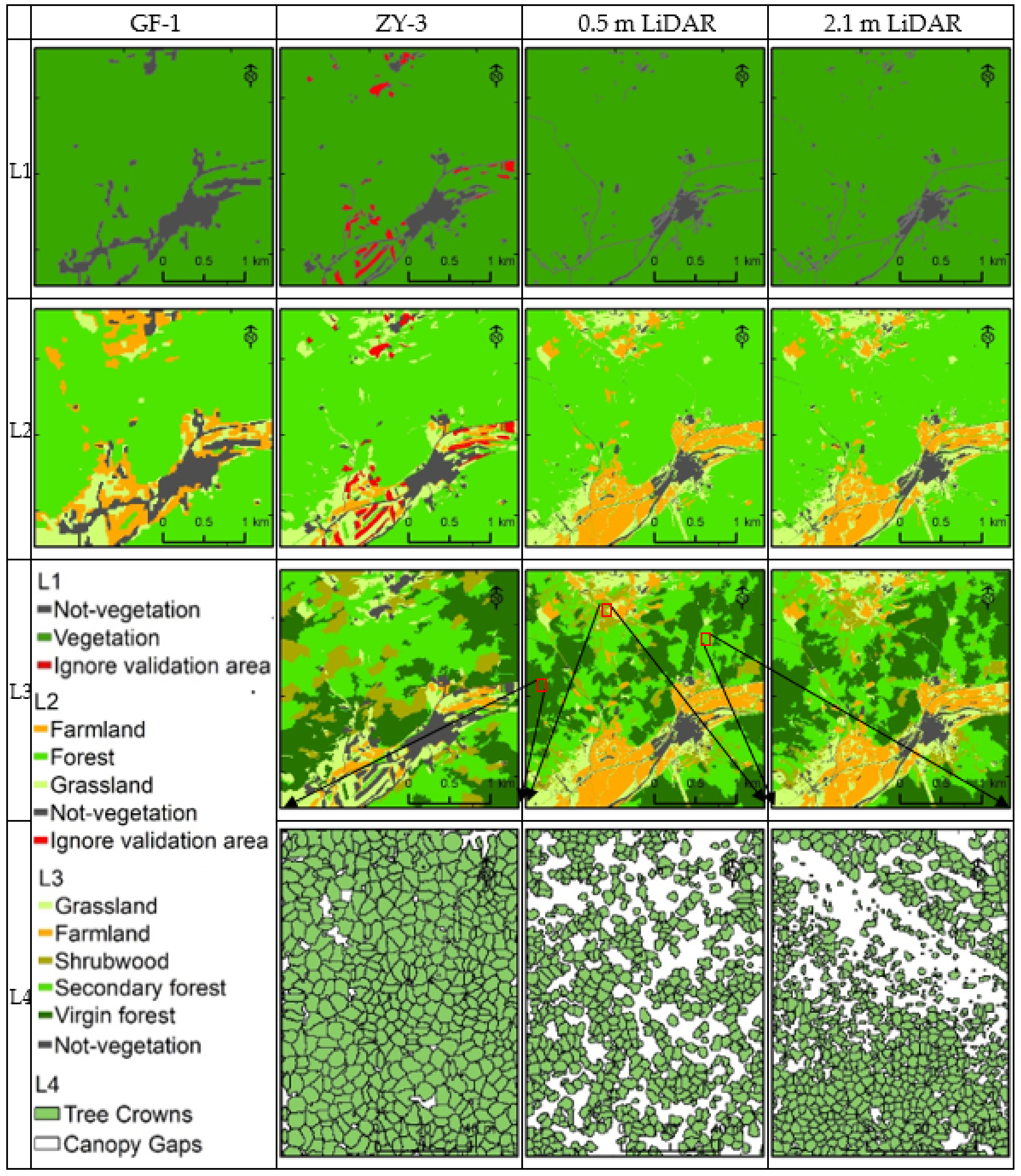
3.1. Vegetation and Non-Vegetation Extraction Results
3.2. Vegetation Type Classification Results
3.3. Classification of Forest Type
3.4. Canopy and Canopy Gaps Distribution
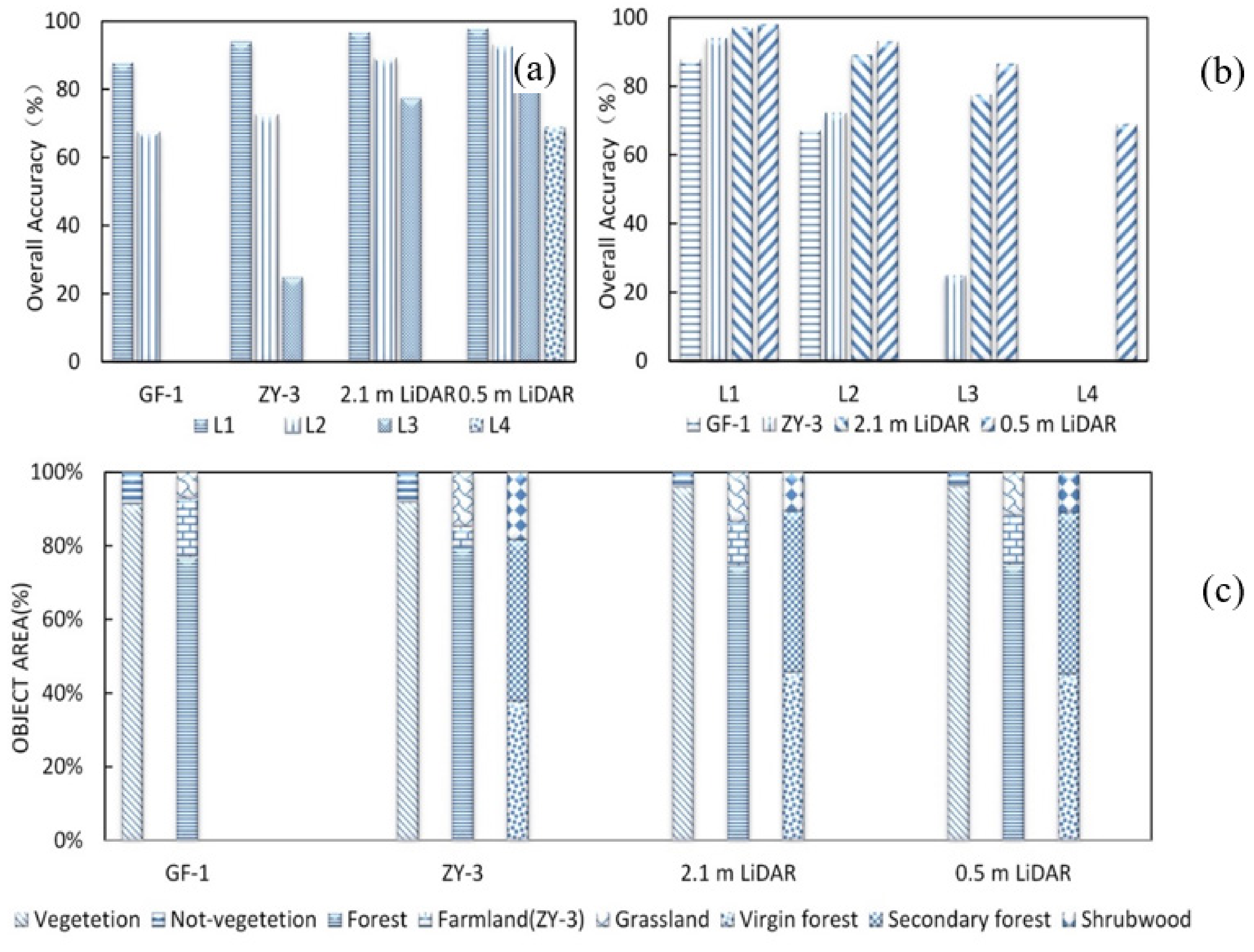
3.5. Classification Accuracy Comparison
4. Discussion
4.1. Attributive Analysis of Classification Results
4.2. Spatial Resolution and the Impact of Data Sources on Classification
4.3. Classification Rules and Their Impact on Classification
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lehnert, L.W.; Meyer, H.; Wang, Y.; Miehe, G.; Thies, B.; Reudenbach, C.; Bendix, J. Retrieval of grassland plant coverage on the Tibetan Plateau based on a multi-scale, multi-sensor and multi-method approach. Remote Sens. Environ. 2015, 164, 197–207. [Google Scholar] [CrossRef]
- Van Beijma, S.; Comber, A.; Lamb, A. Random forest classification of salt marsh vegetation habitats using quad-polarimetric airborne SAR, elevation and optical RS data. Remote Sens. Environ. 2014, 149, 118–129. [Google Scholar] [CrossRef]
- Liu, T.; Yang, X. Mapping vegetation in an urban area with stratified classification and multiple endmember spectral mixture analysis. Remote Sens. Environ. 2013, 133, 251–264. [Google Scholar] [CrossRef]
- Immitzer, M.; Atzberger, C.; Koukal, T. Tree Species Classification with Random Forest Using Very High Spatial Resolution 8-Band WorldView-2 Satellite Data. Remote Sens. 2012, 4, 2661–2693. [Google Scholar] [CrossRef] [Green Version]
- Laurin, G.V.; Puletti, N.; Hawthorne, W.; Liesenberg, V.; Corona, P.; Papale, D.; Chen, Q.; Valentini, R. Discrimination of tropical forest types, dominant species, and mapping of functional guilds by hyperspectral and simulated multispectral Sentinel-2 data. Remote Sens. Environ. 2016, 176, 163–176. [Google Scholar] [CrossRef] [Green Version]
- Naidoo, L.; Cho, M.; Mathieu, R.; Asner, G.P. Classification of savanna tree species, in the Greater Kruger National Park region, by integrating hyperspectral and LiDAR data in a Random Forest data mining environment. ISPRS J. Photogramm. Remote Sens. 2012, 69, 167–179. [Google Scholar] [CrossRef]
- Treitz, P. High Spatial Resolution Remote Sensing Data for Forest Ecosystem Classification An Examination of Spatial Scale. Remote Sens. Environ. 2000, 72, 268–289. [Google Scholar] [CrossRef]
- Krause, G.; Bock, M.; Weiers, S.; Braun, G. Mapping Land-Cover and Mangrove Structures with Remote Sensing Techniques: A Contribution to a Synoptic GIS in Support of Coastal Management in North Brazil. Environ. Manag. 2004, 34, 429–440. [Google Scholar] [CrossRef]
- Zhu, Z.; Woodcock, C.E.; Olofsson, P. Continuous monitoring of forest disturbance using all available Landsat imagery. Remote Sens. Environ. 2012, 122, 75–91. [Google Scholar] [CrossRef]
- Coulter, L.L.; Stow, D.A.; Tsai, Y.-H.; Ibanez, N.; Shih, H.-C.; Kerr, A.; Benza, M.; Weeks, J.R.; Mensah, F. Classification and assessment of land cover and land use change in southern Ghana using dense stacks of Landsat 7 ETM+ imagery. Remote Sens. Environ. 2016, 184, 396–409. [Google Scholar] [CrossRef]
- Liu, X.; Bo, Y.; Zhang, J.; He, Y.Q. Classification of C 3 and C4 vegetation types using MODIS and ETM+ blended high spatio-temporal resolution data. Remote Sens. 2015, 7, 15244–15268. [Google Scholar] [CrossRef] [Green Version]
- Van Coillie, F.; Verbeke, L.; Dewulf, R. Feature selection by genetic algorithms in object-based classification of IKONOS imagery for forest mapping in Flanders, Belgium. Remote Sens. Environ. 2007, 110, 476–487. [Google Scholar] [CrossRef]
- Pu, R.; Landry, S. A comparative analysis of high spatial resolution IKONOS and WorldView-2 imagery for mapping urban tree species. Remote Sens. Environ. 2012, 124, 516–533. [Google Scholar] [CrossRef]
- Feng, Y.; Lu, D.; Moran, E.; Dutra, L.V.; Calvi, M.F.; De Oliveira, M.A.F. Examining Spatial Distribution and Dynamic Change of Urban Land Covers in the Brazilian Amazon Using Multitemporal Multisensor High Spatial Resolution Satellite Imagery. Remote Sens. 2017, 9, 381. [Google Scholar] [CrossRef] [Green Version]
- Masek, J.G.; Huang, C.; Wolfe, R.; Cohen, W.; Hall, F.; Kutler, J.; Nelson, P. North American forest disturbance mapped from a decadal Landsat record. Remote Sens. Environ. 2008, 112, 2914–2926. [Google Scholar] [CrossRef]
- Li, J.; Mao, X. Comparison of Canopy Closure Estimation of Plantations Using Parametric, Semi-Parametric, and Non-Parametric Models Based on GF-1 Remote Sensing Images. Forests 2020, 11, 597. [Google Scholar] [CrossRef]
- Li, N.; Lu, D.; Wu, M.; Zhang, Y.; Lu, L. Coastal wetland classification with multiseasonal high-spatial resolution satellite imagery. Int. J. Remote Sens. 2018, 39, 8963–8983. [Google Scholar] [CrossRef]
- Kim, M.; Warner, T.A.; Madden, M.; Atkinson, D.S. Multi-scale GEOBIA with very high spatial resolution digital aerial imagery: Scale, texture and image objects. Int. J. Remote Sens. 2011, 32, 2825–2850. [Google Scholar] [CrossRef]
- Powers, R.P.; Hay, G.J.; Chen, G. How wetland type and area differ through scale: A GEOBIA case study in Alberta’s Boreal Plains. Remote Sens. Environ. 2012, 117, 135–145. [Google Scholar] [CrossRef]
- Sasaki, T.; Imanishi, J.; Ioki, K.; Morimoto, Y.; Kitada, K. Object-based classification of land cover and tree species by integrating airborne LiDAR and high spatial resolution imagery data. Landsc. Ecol. Eng. 2011, 8, 157–171. [Google Scholar] [CrossRef]
- Zhou, W.; Troy, A. An object-oriented approach for analysing and characterizing urban landscape at the parcel level. Int. J. Remote Sens. 2008, 29, 3119–3135. [Google Scholar] [CrossRef]
- Burnett, C.; Blaschke, T. A multi-scale segmentation/object relationship modelling methodology for landscape analysis. Ecol. Model. 2003, 168, 233–249. [Google Scholar] [CrossRef]
- Ke, Y.; Quackenbush, L.J.; Im, J. Synergistic use of QuickBird multispectral imagery and LIDAR data for object-based forest species classification. Remote Sens. Environ. 2010, 114, 1141–1154. [Google Scholar] [CrossRef]
- Demarchi, L.; Bizzi, S.; Piegay, H. Hierarchical Object-Based Mapping of Riverscape Units and in-Stream Mesohabitats Using LiDAR and VHR Imagery. Remote Sens. 2016, 8, 97. [Google Scholar] [CrossRef] [Green Version]
- Xuegang, M.; Liang, Z.; Fan, W. Object-Oriented Automatic Identification of Forest Gaps Using Digital Orthophoto Maps and LiDAR Data. Can. J. Remote Sens. 2020, 46, 177–192. [Google Scholar] [CrossRef]
- Mao, X.; Hou, J. Object-based forest gaps classification using airborne LiDAR data. J. For. Res. 2019, 30, 617. [Google Scholar] [CrossRef]
- Ma, L.; Li, M.; Ma, X.; Cheng, L.; Du, P.; Liu, Y. A review of supervised object-based land-cover image classification. ISPRS J. Photogramm. Remote Sens. 2017, 130, 277–293. [Google Scholar] [CrossRef]
- Drăguţ, L.; Csillik, O.; Eisank, C.; Tiede, D. Automated parameterisation for multi-scale image segmentation on multiple layers. ISPRS J. Photogramm. Remote Sens. 2014, 88, 119–127. [Google Scholar] [CrossRef] [Green Version]
- Mallinis, G.; Koutsias, N.; Tsakiri, M.; Karteris, M. Object-based classification using Quickbird imagery for delineating forest vegetation polygons in a Mediterranean test site. ISPRS J. Photogramm. Remote Sens. 2008, 63, 237–250. [Google Scholar] [CrossRef]
- Qi, Z.; Yeh, A.G.-O.; Li, X.; Lin, Z. A novel algorithm for land use and land cover classification using RADARSAT-2 polarimetric SAR data. Remote Sens. Environ. 2012, 118, 21–39. [Google Scholar] [CrossRef]
- Dalponte, M.; Ørka, H.O.; Ene, L.; Gobakken, T.; Næsset, E. Tree crown delineation and tree species classification in boreal forests using hyperspectral and ALS data. Remote Sens. Environ. 2014, 140, 306–317. [Google Scholar] [CrossRef]
- Xie, Z.; Chen, Y.; Lu, D.; Li, G.; Chen, E. Classification of Land Cover, Forest, and Tree Species Classes with ZiYuan-3 Multispectral and Stereo Data. Remote Sens. 2019, 11, 164. [Google Scholar] [CrossRef] [Green Version]
- Gudex-Cross, D.; Pontius, J.; Adams, A. Enhanced forest cover mapping using spectral unmixing and object-based classification of multi-temporal Landsat imagery. Remote Sens. Environ. 2017, 196, 193–204. [Google Scholar] [CrossRef]
- Han, N.; Du, H.; Zhou, G.; Xu, X.; Ge, H.; Liu, L.; Gao, G.; Sun, S. Exploring the synergistic use of multi-scale image object metrics for land-use/land-cover mapping using an object-based approach. Int. J. Remote Sens. 2015, 36, 3544–3562. [Google Scholar] [CrossRef]
- Mishra, N.B.; Crews, K.A. Mapping vegetation morphology types in a dry savanna ecosystem: Integrating hierarchical object-based image analysis with Random Forest. Int. J. Remote Sens. 2014, 35, 1175–1198. [Google Scholar] [CrossRef]
- Mui, A.; He, Y.; Weng, Q. An object-based approach to delineate wetlands across landscapes of varied disturbance with high spatial resolution satellite imagery. ISPRS J. Photogramm. Remote Sens. 2015, 109, 30–46. [Google Scholar] [CrossRef] [Green Version]
- Kamal, M.; Phinn, S.; Johansen, K. Object-Based Approach for Multi-Scale Mangrove Composition Mapping Using Multi-Resolution Image Datasets. Remote Sens. 2015, 7, 4753–4783. [Google Scholar] [CrossRef] [Green Version]
- Pham, L.T.; Brabyn, L.; Ashraf, M.S. Combining QuickBird, LiDAR, and GIS topography indices to identify a single native tree species in a complex landscape using an object-based classification approach. Int. J. Appl. Earth Obs. Geoinf. 2016, 50, 187–197. [Google Scholar] [CrossRef]
- Stoffels, J.; Hill, J.; Sachtleber, T.; Mader, S.; Buddenbaum, H.; Stern, O.; Langshausen, J.; Dietz, J.; Ontrup, G. Satellite-Based Derivation of High-Resolution Forest Information Layers for Operational Forest Management. Forests 2015, 6, 1982–2013. [Google Scholar] [CrossRef]
- Dronova, I.; Gong, P.; Clinton, N.E.; Wang, L.; Fu, W.; Qi, S.; Liu, Y. Landscape analysis of wetland plant functional types: The effects of image segmentation scale, vegetation classes and classification methods. Remote Sens. Environ. 2012, 127, 357–369. [Google Scholar] [CrossRef]
- Blaschke, T.; Hay, G.J.; Kelly, M.; Lang, S.; Hofmann, P.; Addink, E.; Feitosa, R.Q.; Van Der Meer, F.; Van Der Werff, H.; Van Coillie, F.; et al. Geographic Object-Based Image Analysis—Towards a new paradigm. ISPRS J. Photogramm. Remote Sens. 2014, 87, 180–191. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pang, Y.; Li, Z.; Ju, H.; Lu, H.; Jia, W.; Si, L.; Guo, Y.; Liu, Q.; Li, S.; Liu, L.; et al. LiCHy: The CAF’s LiDAR, CCD and Hyperspectral Integrated Airborne Observation System. Remote Sens. 2016, 8, 398. [Google Scholar] [CrossRef] [Green Version]
- Jakubowski, M.K.; Li, W.; Guo, Q.; Kelly, M. Delineating Individual Trees from Lidar Data: A Comparison of Vector- and Raster-based Segmentation Approaches. Remote Sens. 2013, 5, 4163–4186. [Google Scholar] [CrossRef] [Green Version]
- Chander, G.; Markham, B.L.; Helder, D.L. Summary of current radiometric calibration coefficients for Landsat MSS, TM, ETM+, and EO-1 ALI sensors. Remote Sens. Environ. 2009, 113, 893–903. [Google Scholar] [CrossRef]
- Karathanassi, V.; Kolokousis, P.; Ioannidou, S. A comparison study on fusion methods using evaluation indicators. Int. J. Remote Sens. 2007, 28, 2309–2341. [Google Scholar] [CrossRef]
- Gong, H.; Zhao, W.; Gong, Z.; Gong, H.; Chen, Z.; Tang, X. Topographic Correction of ZY-3 Satellite Images and Its Effects on Estimation of Shrub Leaf Biomass in Mountainous Areas. Remote Sens. 2014, 6, 2745–2764. [Google Scholar] [CrossRef] [Green Version]
- Reese, H.; Olsson, H. C-correction of optical satellite data over alpine vegetation areas: A comparison of sampling strategies for determining the empirical c-parameter. Remote Sens. Environ. 2011, 115, 1387–1400. [Google Scholar] [CrossRef] [Green Version]
- Sola, I.; González-Audícana, M.; Álvarez-Mozos, J. Multi-criteria evaluation of topographic correction methods. Remote Sens. Environ. 2016, 184, 247–262. [Google Scholar] [CrossRef] [Green Version]
- Bunting, P.; Lucas, R. The delineation of tree crowns in Australian mixed species forests using hyperspectral Compact Airborne Spectrographic Imager (CASI) data. Remote Sens. Environ. 2006, 101, 230–248. [Google Scholar] [CrossRef]
- Gougeon, F.A. A Crown-Following Approach to the Automatic Delineation of Individual Tree Crowns in High Spatial Resolution Aerial Images. Can. J. Remote Sens. 2014, 21, 274–284. [Google Scholar] [CrossRef]
- Zhan, Q.; Molenaar, M.; Tempfli, K.; Shi, W. Quality assessment for geo-spatial objects derived from remotely sensed data. Int. J. Remote Sens. 2005, 26, 2953–2974. [Google Scholar] [CrossRef]
- Whiteside, T.G.; Maier, S.W.; Boggs, G.S. Area-based and location-based validation of classified image objects. Int. J. Appl. Earth Obs. Geoinf. 2014, 28, 117–130. [Google Scholar] [CrossRef]
- Strahler, A.H.; Woodcock, C.E.; Smith, J.A. On the nature of models in remote sensing. Remote Sens. Environ. 1986, 20, 121–139. [Google Scholar] [CrossRef]
- Rocchini, D. Effects of spatial and spectral resolution in estimating ecosystem α-diversity by satellite imagery. Remote Sens. Environ. 2007, 111, 423–434. [Google Scholar] [CrossRef]
- Cushnie, J.L. The interactive effect of spatial resolution and degree of internal variability within land-cover types on classification accuracies. Int. J. Remote Sens. 1987, 8, 15–29. [Google Scholar] [CrossRef]
- Andréfouët, S.; Kramer, P.; Torres-Pulliza, D.; Joyce, K.E.; Hochberg, E.J.; Garza-Pérez, R.; Mumby, P.J.; Riegl, B.; Yamano, H.; White, W.H.; et al. Multi-site evaluation of IKONOS data for classification of tropical coral reef environments. Remote Sens. Environ. 2003, 88, 128–143. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image Type | Sensor | Image Time | Cell Size | Spectral Band (nm) | Geometric Attribute |
|---|---|---|---|---|---|
| GF-1 | WFV | 16 September 2015 | 16 m | Blue (0.45–0.52), | Level2A |
| Green (0.52–0.59), | |||||
| Red (0.63–0.69), | |||||
| Near infrared (0.77–0.89) | |||||
| ZY-3 | Multispectral camera | 16 September 2014 | 2.1 m | Blue (0.45–0.52), | Level3A |
| Green (0.52–0.59), | |||||
| Red (0.63–0.69), | |||||
| Near infrared (0.77–0.89), | |||||
| Full color (0.50–0.80) | |||||
| CHM | Riegl LMS-Q680i | 14–15 September 2015 | 0.5 m/2.1 m | — | Geographic registration |
| FCC | |||||
| DOM | Digi CAM-60 | 14–15 September 2015 | 0.2 m | RGB color | Geographic registration |
| Level | Category | GF-1 | ZY-3 | 2.1 m LiDAR | 0.5 m LiDAR |
|---|---|---|---|---|---|
| L1 | Object domain | Multiresolution seg. (SP:0.2, S:0.001, C:0.2) | Multiresolution seg. (SP:1.5, S:0.0005, C:0.5) | Multiresolution seg. (SP:2, S:0.001, C:0.9, w:2CHM-3FCC) | Multiresolution seg. (SP:30, S:0.001, C:0.5, w:2CHM-3FCC) |
| Vegetation | FDI ≥ 0.16 or NDVI ≥ 1 | FDI ≥ 0.09 or NDVI ≥ 0.8 | Mean FCC ≥ 0.16 | Mean FCC ≥ 0.16 | |
| Non-vegetation | Non-vegetation object | Non-vegetation object | Non-vegetation object | Non-vegetation object | |
| L2 | Object domain | L1 layer vegetation object | L1 layer vegetation object | After the L1 layer vegetation objects are merged Contrast split seg. (CHM: edge ratio, 0.07~1, add 0.05) | After the L1 layer vegetation objects are merged Contrast split seg. (CHM: edge ratio, 0.07~1, add 0.05) |
| Forest | SVM, SNN, CART | SVM, SNN, CART | Mean CHM ≥ 0.08 | Mean CHM ≥ 0.08 | |
| Farmland | Cross-L3 interaction classification | Cross-L3 interaction classification | |||
| Grassland | Non-forest, farmland objects | Non-forest, farmland objects | |||
| L3 | Object domain | — | After the L2 layer forest objects are merged Multiresolution seg. (SP:5, S:0.001, C:0.8, w:1PCA1) | After the L2 layer forest objects are merged Multiresolution seg. (SP:6, S:0.001, C:0.8, w:1CHM-1FCC) | After the L2 layer forest objects are merged Multiresolution seg. (SP:40, S:0.001, C:0.8, w:1CHM-1FCC) |
| Low bush | Mean NIR ≤ 0.24 and Std. deviation NIR ≥ 0.032 | Mean CHM ≤ 0.3 | Mean CHM ≤ 0.3 | ||
| Original forest | Mean NIR ≥ 0.24 | Mean CHM > 0.55 and Std. deviation CHM < 0.14 | Mean CHM > 0.55 and Std.deviation CHM < 0.14 | ||
| Secondary forest | Mean NIR ≤ 0.24 and Std.deviation NIR < 0.032 | 0.3 < Mean CHM ≤ 0.55 or Std.deviation CHM ≥ 0.14 | 0.3 < Mean CHM ≤ 0.55 or Std.deviation CHM ≥ 0.14 | ||
| L4 | forest type | Shrub | Original forest | Secondary forest | |
| Object domain | L3 layer object Chessboard seg.:1 | L3 layer object Chessboard seg.:1 | L3 layer object Chessboard seg.:1 | ||
| Canopy gap | — | Mean CHM ≤ 0.04 | Mean CHM ≤ 0.48 | Mean CHM ≤ 0.48 | |
| Single-tree canopy | The local maximum point of CHM in the range of 3 m is in accordance with Mean CHM > 0.04 and Existence of Gaps (0) ≠ 1 as seeds; Growth was performed in regions with Ratio to neighbor < 1.5 until Area > 15 m2 or Length/Width > 2.3 | The local maximum point of CHM in the range of 3 m is in accordance with Mean CHM > 0.48 and Existence of Gaps (0) ≠ 1 as seeds; Growth was performed in regions with Ratio to neighbor < 1.5 until Area > 30 m2 or Length/Width > 2.3 | The local maximum point of CHM in the range of 4 m is in accordance with Mean CHM > 0.48 and Existence of Gaps (0) ≠ 1 as seeds; Growth was performed in regions with Ratio to neighbor < 1.5 until Area > 25 m2 or Length/Width > 2.3 |
| Level | Category | GF-1 | ZY-3 | 2.1 m LiDAR | 0.5 m LiDAR | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| P A | U A | T A | O A | P A | U A | T A | O A | P A | U A | T A | O A | P A | U A | T A | O A | |||
| L1 level (L1) | Vegetation | 89 | 99 | 88 | 88 | 96 | 98 | 94 | 94 | 99 | 99 | 97 | 97 | 99 | 99 | 98 | 98 | |
| Non-vegetation | 80 | 29 | 27 | 71 | 50 | 42 | 81 | 76 | 64 | 81 | 84 | 71 | ||||||
| L2 level (L2) | Forest | SVM | 90 | 92 | 84 | 67 | 88 | 91 | 81 | 72 | 96 | 98 | 94 | 89 | 98 | 98 | 96 | 93 |
| SNN | 89 | 94 | 84 | 69 | 95 | 87 | 83 | 73 | ||||||||||
| CART | 88 | 95 | 84 | 66 | 87 | 90 | 80 | 72 | ||||||||||
| Grassland | SVM | 12 | 27 | 9 | 67 | 66 | 37 | 31 | 72 | 84 | 68 | 60 | 87 | 81 | 72 | |||
| SNN | 36 | 37 | 22 | 69 | 47 | 36 | 26 | 73 | ||||||||||
| CART | 16 | 24 | 10 | 66 | 35 | 33 | 20 | 72 | ||||||||||
| Farmland | SVM | 66 | 46 | 37 | 67 | 27 | 70 | 24 | 72 | 77 | 89 | 70 | 89 | 93 | 83 | |||
| SNN | 66 | 53 | 42 | 69 | 20 | 79 | 18 | 73 | ||||||||||
| CART | 65 | 43 | 35 | 66 | 65 | 59 | 45 | 72 | ||||||||||
| L3 level (L3) | Original forest | — | — | — | — | 26 | 19 | 13 | 25 | 57 | 69 | 46 | 68 | 79 | 71 | 60 | 80 | |
| Secondary forest | — | — | — | 22 | 27 | 14 | 80 | 64 | 55 | 81 | 82 | 69 | ||||||
| shrub | — | — | — | 33 | 38 | 21 | 65 | 88 | 59 | 81 | 91 | 75 | ||||||
| L4 level (L4) | Original forest | Single-tree canopy | — | — | — | — | — | — | — | — | — | — | — | — | — | — | 83 | 66 |
| Canopy gaps | — | — | — | — | — | — | — | — | — | 16 | 38 | 13 | ||||||
| Secondary forest | Single-tree canopy | — | — | — | — | — | — | — | — | — | — | — | — | — | — | 63 | 70 | |
| Canopy gaps | — | — | — | — | — | — | — | — | — | 82 | 81 | 68 | ||||||
| Shrub | Single-tree canopy | — | — | — | — | — | — | — | — | — | — | — | — | — | — | 72 | 71 | |
| Canopy gaps | — | — | — | — | — | — | — | — | — | 83 | 80 | 67 | ||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mao, X.; Deng, Y.; Zhu, L.; Yao, Y. Hierarchical Geographic Object-Based Vegetation Type Extraction Based on Multi-Source Remote Sensing Data. Forests 2020, 11, 1271. https://doi.org/10.3390/f11121271
Mao X, Deng Y, Zhu L, Yao Y. Hierarchical Geographic Object-Based Vegetation Type Extraction Based on Multi-Source Remote Sensing Data. Forests. 2020; 11(12):1271. https://doi.org/10.3390/f11121271
Chicago/Turabian StyleMao, Xuegang, Yueqing Deng, Liang Zhu, and Yao Yao. 2020. "Hierarchical Geographic Object-Based Vegetation Type Extraction Based on Multi-Source Remote Sensing Data" Forests 11, no. 12: 1271. https://doi.org/10.3390/f11121271
APA StyleMao, X., Deng, Y., Zhu, L., & Yao, Y. (2020). Hierarchical Geographic Object-Based Vegetation Type Extraction Based on Multi-Source Remote Sensing Data. Forests, 11(12), 1271. https://doi.org/10.3390/f11121271