
Comparison of Selected Terramechanical Test Procedures and Cartographic Indices to Predict Rutting Caused by Machine Traffic during a Cut-to-Length Thinning Operation


Abstract
:1. Introduction
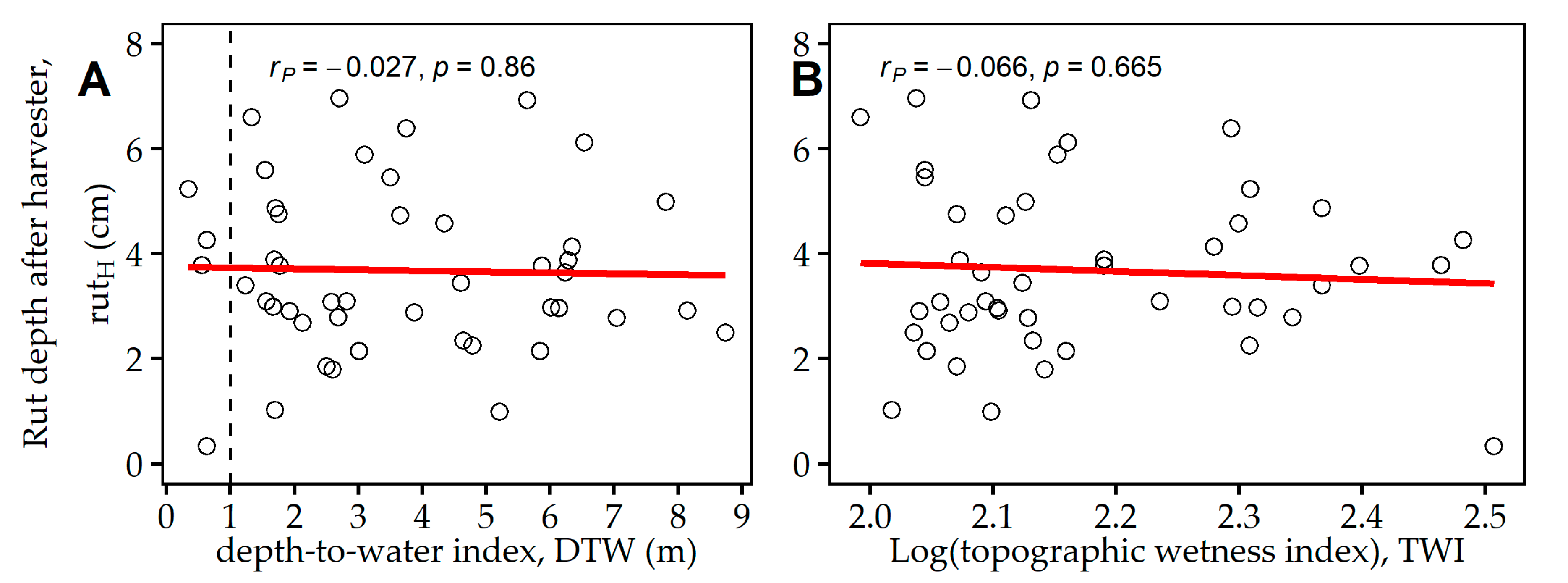
- Can rut depth after a cut-to-length (CTL) thinning-operation be predicted by the two used cartographic indices (i.e., depth-to-water and topographic wetness index)?
- Which of the applied terramechanical test procedures show a reliable response with occurring rut depth, in terms of a high Pearson coefficient of correlation?
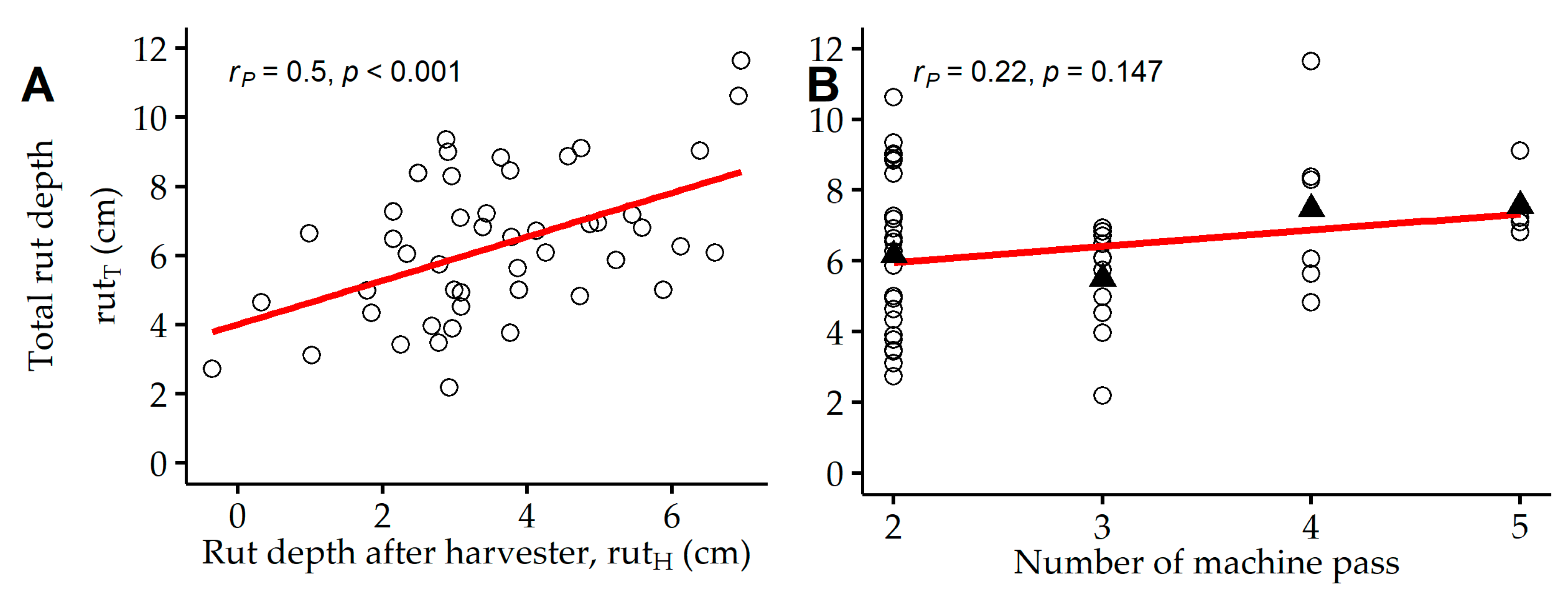
- Is rut depth formation after the first machine pass (i.e., facilitated by a harvester) a reliable figure to predict total rutting of a consecutive CTL thinning operation?
2. Materials and Methods
2.1. Stand Characteristics
2.2. Harvesting Operation
2.3. Field Measurements
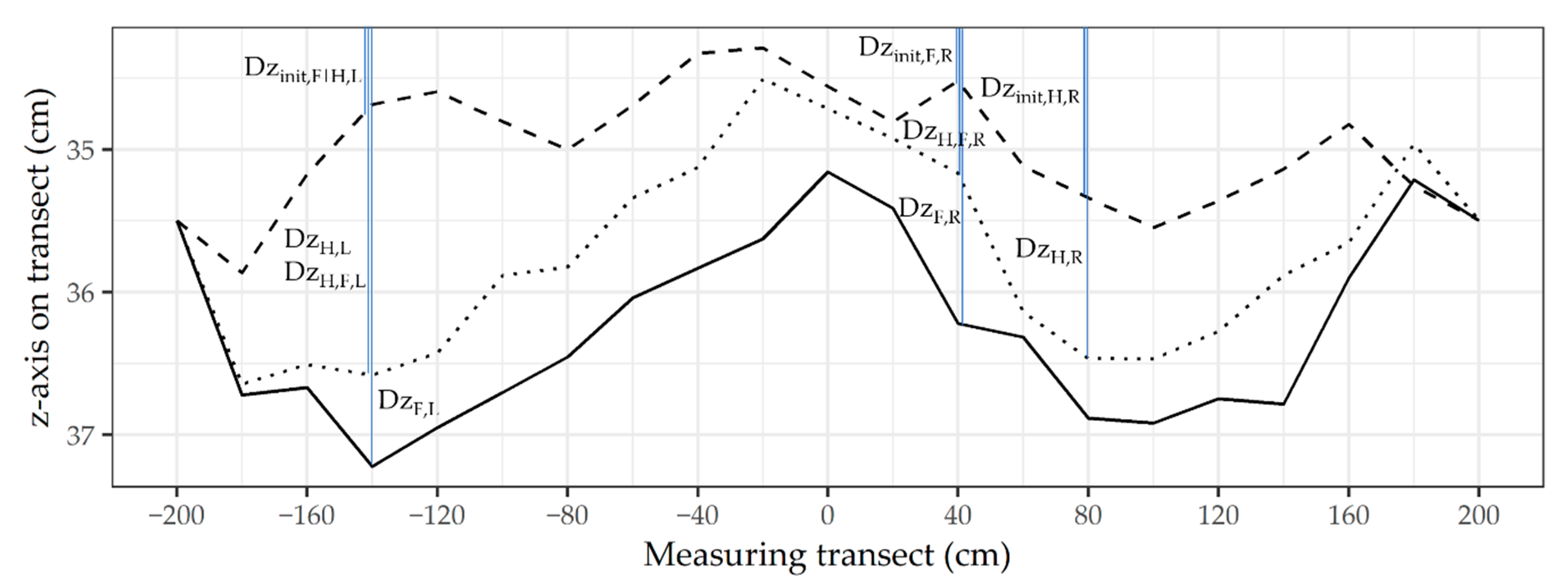
2.3.1. Rutting on Machine-Operating Trails
2.3.2. Soil Samples
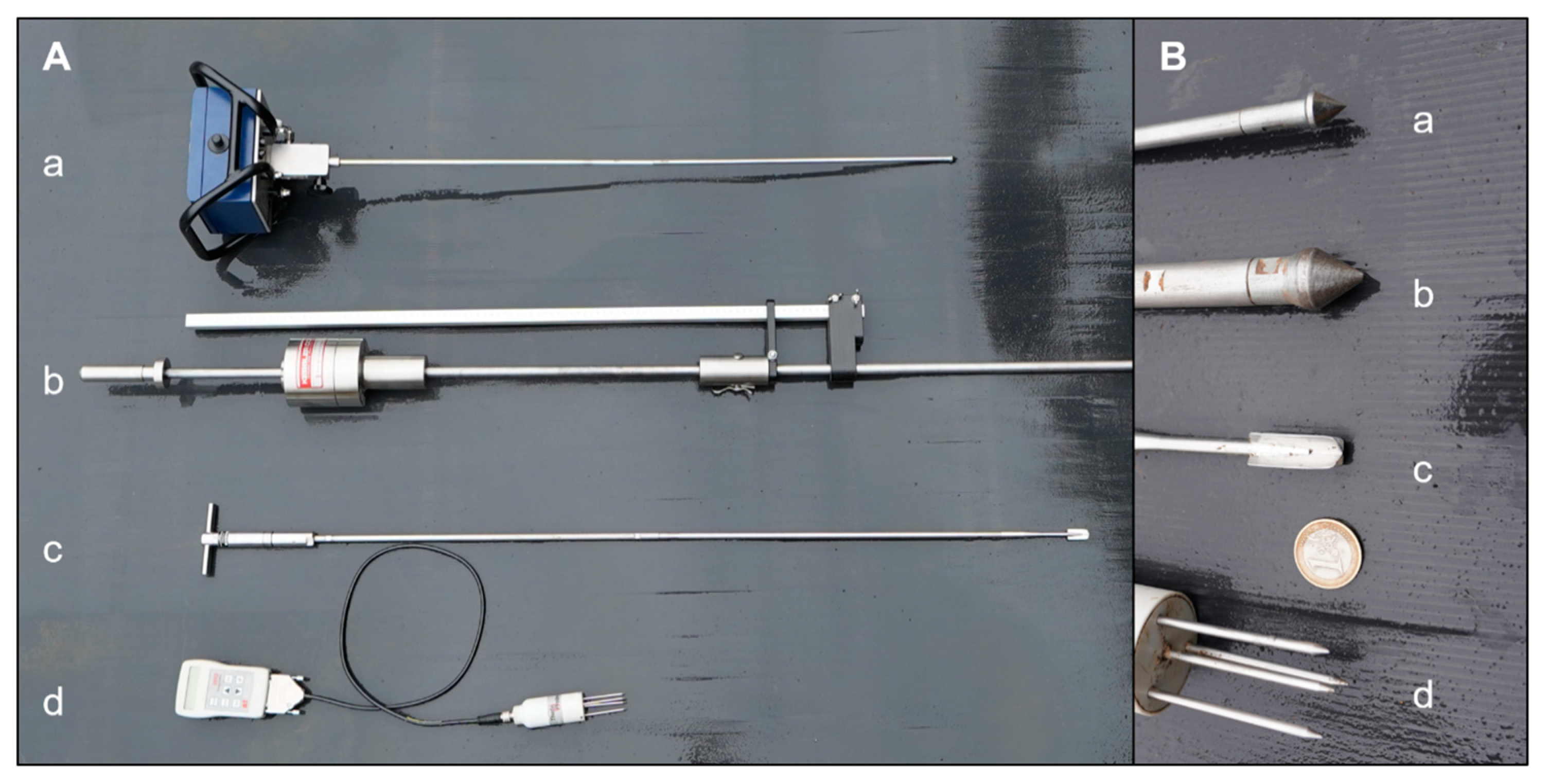
2.3.3. Terramechanical Test Procedures
- Moisture meter: Volumetric soil moisture content (SMCVOL, vol%) was quantified in the mineral topsoil, where a 57 mm long TDR probe (HH2-moisture meter, Delta-T-Devices, Cambridge, UK) was inserted from above, after the removal of humus. This moisture meter measures volumetric moisture content, θv, by responding to changes in the apparent dielectric constant of moist soil, resulting in a ratio between the volume of water and the total volume of the soil sample [44]. Seven measurements on each transect were averaged, giving SMCVOL.
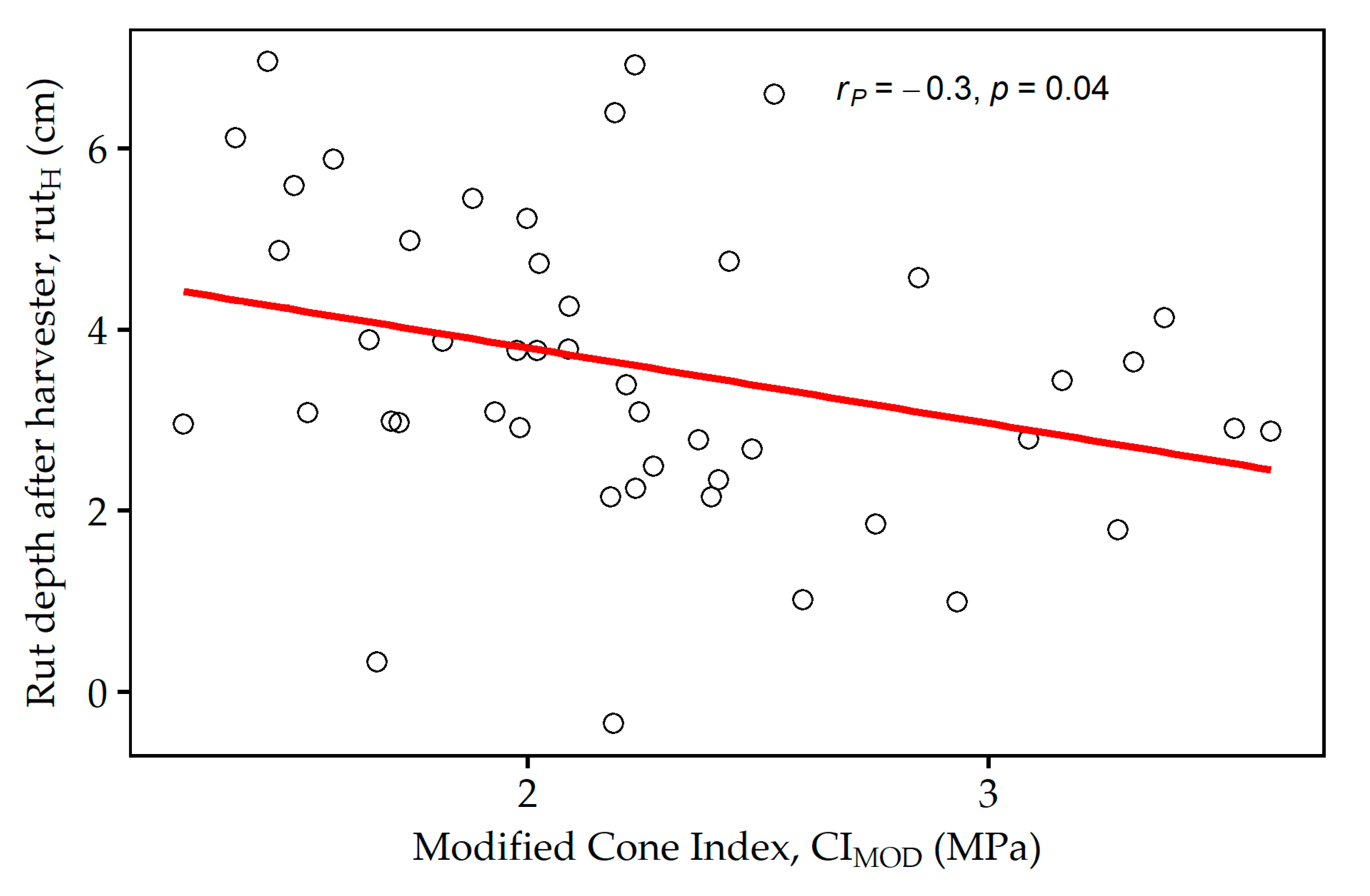
- Penetrologger: Penetration resistance was measured, using a handheld Penetrologger (1.0 cm2, 60° cone, Eijkelkamp Soil and Water, Giesbeek, The Netherlands). This device captures the soil penetration resistance for each centimeter by means of a load cell, whereas values of the upmost 15 cm of mineral soil were averaged giving a Cone Index (CI, MPa), as mean value for seven penetrations on each transect. Based on previous experience by the authors [45], a modified Cone Index (CIMOD, MPa) was calculated in addition. In contrast to the estimation of CI, soil penetration values between 10 and 20 cm were considered to quantify CIMOD, due to the high variance of penetration resistance in the upmost centimeters. Besides, the total penetration depth, captured by the Penetrologger, was averaged for each measuring transect, giving PD (cm).
- Dual-mass dynamic cone penetrometer: Since we decided to keep the time demand for measurements approximately similar between the compared methods, the number of samples was reduced for this instrument. Consequently, one measurement, consisting of six hammer blows, was done in the middle of each transect. The incremental penetration depth was captured and used to calculate the corresponding parameter, derived by the dual-mass dynamic cone penetrometer, DCP (cm blow−1), defined as the average of penetration depth per hammer blow, until it exceeded 15 cm penetration depth.
- Vane tester: The used Eijkelkamp (Eijkelkamp Soil and Water, Giesbeek, The Netherlands) field inspection vane tester is an instrument for in-situ measurements of shear strength through vanes of different sizes. Measurements are conducted through a spiral spring, detecting the torque, which needs to be applied to a handle in order to displace the soil through the vane. The used (and smallest, 16 mm × 32 mm sized) vane allows to cover readings up to 260 kPa, by an accuracy within 10% [46]. The current measurements were done in a mineral soil depth of 10 to 15 cm, as recommended by Heubaum et al. [30], giving shear strength (τ, kPa) as mean value for each measuring transect.
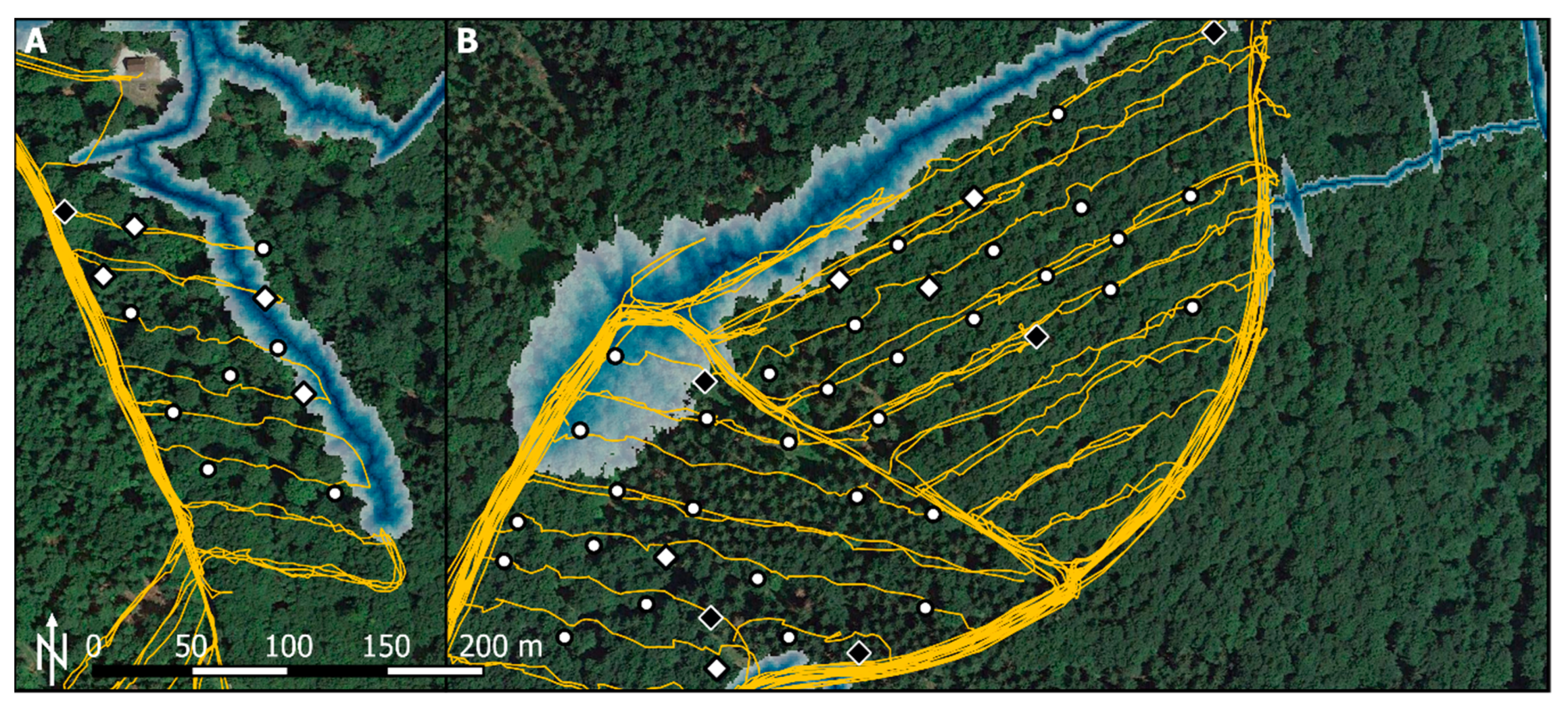
2.4. Trafficability Maps
2.4.1. Depth-to-Water Index
2.4.2. Topographic Wetness Index
2.5. Data Analysis
3. Results
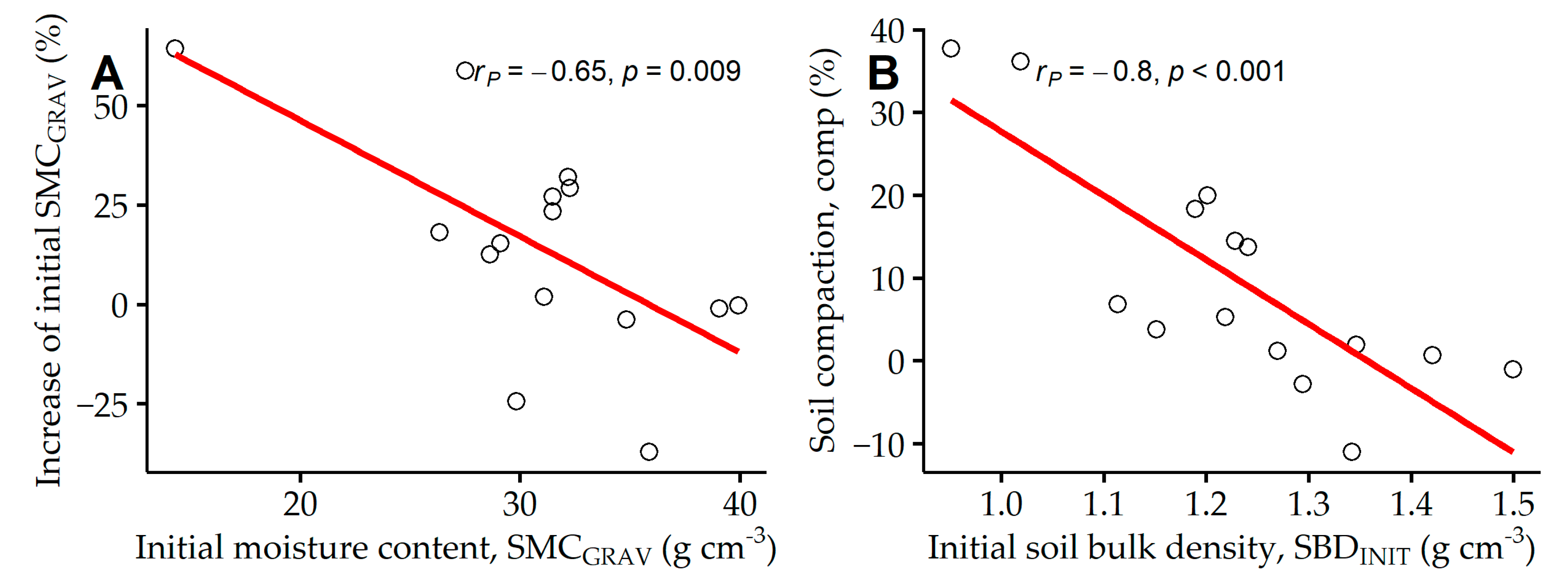
3.1. Soil Properties
3.2. Rutting
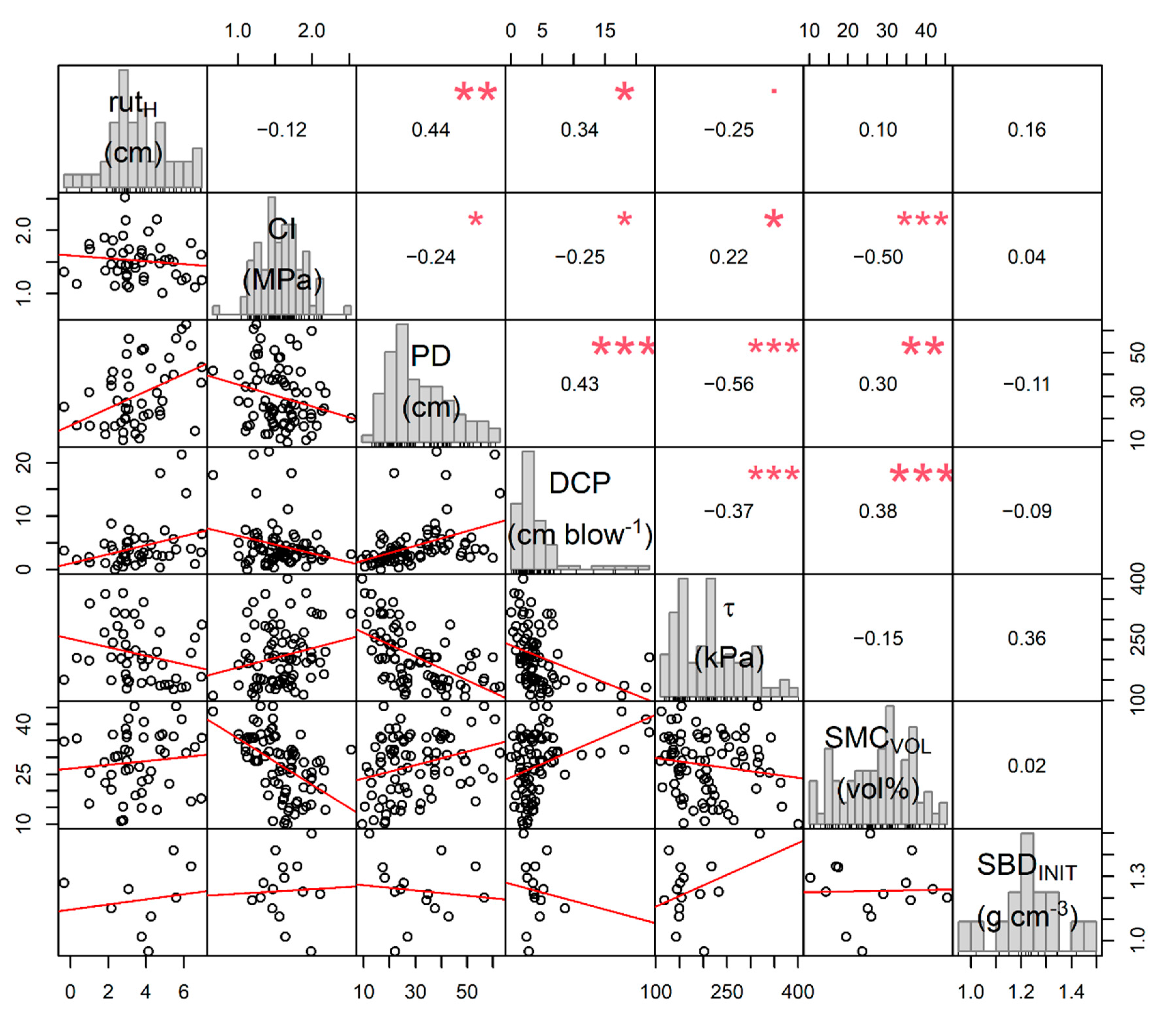
3.3. Correlations with Terramechanical Tests
3.4. Correlations with Cartographic Indices
4. Discussion
4.1. Soil Impact
4.2. Validation of Surveyed Tools
4.3. Correlations with Cartographic Indices and Soil Moisture
4.4. Prediction of Rutting
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| transect | tr.length | DzINIT | DzH | DzF | tH | tF |
|---|---|---|---|---|---|---|
| 41 | −200 | 36 | 34 | 34 | 0 | 0 |
| 41 | −180 | 32 | 33 | 33 | 0 | 0 |
| 41 | −160 | 32 | 32 | 32 | 0 | 0 |
| 41 | −140 | 32 | 32 | 31 | 0 | 0 |
| 41 | −120 | 30 | 32 | 31 | L | 0 |
| 41 | −100 | 31 | 33 | 33 | L | L |
| 41 | −80 | 31 | 32 | 33 | L | L |
| 41 | −60 | 29 | 30 | 35 | L | L |
| 41 | −40 | 30 | 29 | 32 | 0 | L |
| 41 | −20 | 27 | 28 | 29 | 0 | L |
| 41 | 0 | 29 | 29 | 28 | 0 | 0 |
| 41 | 20 | 29 | 30 | 29 | 0 | 0 |
| 41 | 40 | 30 | 29 | 30 | 0 | 0 |
| 41 | 60 | 29 | 30 | 29 | 0 | 0 |
| 41 | 80 | 31 | 32 | 31 | 0 | 0 |
| 41 | 100 | 29 | 32 | 31 | R | 0 |
| 41 | 120 | 32 | 33 | 34 | R | R |
| 41 | 140 | 33 | 34 | 36 | R | R |
| 41 | 160 | 35 | 36 | 37 | R | R |
| 41 | 180 | 37 | 37 | 37 | 0 | R |
| 41 | 200 | 38 | 39 | 38 | 0 | R |
Appendix B
- library(dplyr) #package: {dplyr} [80]
- Mean <- function(x) round(mean(x, na.rm=T), digits = 2)
- Max <- function(x) ifelse( !all(is.na(x)), max(x, na.rm=T), NA)
- data.frame %>% group_by(transect) %>%
- summarise(rutH = Mean(c(Max(DzH[tH == ‘L’] - Dzinit[tH == ‘L’]),
- Max(DzH[tH == ‘R’] - Dzinit[tH == ‘R’]))),
- rutF = Mean(c(Max(DzF[tF == ‘L’] - DzH[tF == ‘L’]),
- Max(DzF[tF == ‘R’] - DzH[tF == ‘R’]))),
- rutT = Mean(c(Max(DzF[tH != 0 | tF != 0] - Dzinit[tH != 0 | tF != 0]),
- Max(DzF[tH != 0 | tF != 0] - Dzinit[tH != 0 | tF != 0]))))
References
- Overpeck, J.T.; Rind, D.; Goldberg, R. Climate-induced changes in forest disturbance and vegetation. Nature 1990, 343, 51–53. [Google Scholar] [CrossRef]
- Seidl, R.; Schelhaas, M.-J.; Lexer, M.J. Unraveling the drivers of intensifying forest disturbance regimes in Europe. Glob. Chang. Biol. 2011, 17, 2842–2852. [Google Scholar] [CrossRef]
- Schelhaas, M.-J.; Nabuurs, G.-J.; Schuck, A. Natural disturbances in the European forests in the 19th and 20th centuries. Glob. Chang. Biol. 2003, 9, 1620–1633. [Google Scholar] [CrossRef]
- Adams, H.D.; Macalady, A.K.; Breshears, D.D.; Allen, C.D.; Stephenson, N.L.; Saleska, S.R.; Huxman, T.E.; McDowell, N.G. Climate-Induced Tree Mortality: Earth System Consequences. Eos Trans. Am. Geophys. Union 2010, 91, 153–154. [Google Scholar] [CrossRef]
- Jenkins, M.J.; Hebertson, E.; Page, W.; Jorgensen, C.A. Bark beetles, fuels, fires and implications for forest management in the Intermountain West. For. Ecol. Manag. 2008, 254, 16–34. [Google Scholar] [CrossRef]
- Simard, M.; Romme, W.H.; Griffin, J.M.; Turner, M.G. Do mountain pine beetle outbreaks change the probability of active crown fire in lodgepole pine forests? Ecol. Monogr. 2011, 81, 3–24. [Google Scholar] [CrossRef]
- Botta, G.F.; Becerra, A.T.; Tourn, F.B. Effect of the number of tractor passes on soil rut depth and compaction in two tillage regimes. Soil Tillage Res. 2009, 103, 381–386. [Google Scholar] [CrossRef]
- Eliasson, L. Effects of forwarder tyre pressure on rut formation and soil compaction. Silva Fenn. 2005, 39, 549–557. [Google Scholar] [CrossRef] [Green Version]
- Labelle, E.R.; Jaeger, D. Soil Compaction Caused by Cut-to-Length Forest Operations and Possible Short-Term Natural Rehabilitation of Soil Density. Soil Sci. Soc. Am. J. 2011, 75, 2314–2329. [Google Scholar] [CrossRef] [Green Version]
- Sakai, H.; Nordfjell, T.; Suadicani, K.; Talbot, B.; Bøllehuus, E. Soil compaction on forest soils from different kinds of tires and tracks and possibility of accurate estimate. Croat. J. For. Eng. 2008, 29, 15–27. [Google Scholar]
- Beylich, A.; Oberholzer, H.-R.; Schrader, S.; Höper, H.; Wilke, B.-M. Evaluation of soil compaction effects on soil biota and soil biological processes in soils. Soil Tillage Res. 2010, 109, 133–143. [Google Scholar] [CrossRef]
- Kozlowski, T.T. Soil compaction and growth of woody plants. Scand. J. For. Res. 1999, 14, 596–619. [Google Scholar] [CrossRef]
- Ampoorter, E.; Verheygen, K.; Hermy, M. Soil Damage after Mechanized Harvesting: Results of a Meta-Analysis; COFE: Lake Tahoe, CA, USA, 2009. [Google Scholar]
- Owende, P.M.O.; Lyons, J.; Haarlaa, R.; Peltola, A.; Spinelli, R.; Molano, J.; Ward, S.M. Operations Protocol for Eco-Efficient Wood Harvesting on Sensitive Sites; 2002; Available online: https://www.ucd.ie/foresteng/html/ecowood/op.pdf (accessed on 19 January 2021).
- Horn, R.; Vossbrink, J.; Peth, S.; Becker, S. Impact of modern forest vehicles on soil physical properties. For. Ecol. Manag. 2007, 248, 56–63. [Google Scholar] [CrossRef]
- Bygdén, G.; Eliasson, L.; Wästerlund, I. Rut depth, soil compaction and rolling resistance when using bogie tracks. J. Terramechan. 2003, 40, 179–190. [Google Scholar] [CrossRef]
- Starke, M.; Derron, C.; Heubaum, F.; Ziesak, M. Rut Depth Evaluation of a Triple-Bogie System for Forwarders—Field Trials with TLS Data Support. Sustainability 2020, 12, 6412. [Google Scholar] [CrossRef]
- Sirén, M.; Salmivaara, A.; Ala-Ilomäki, J.; Launiainen, S.; Lindeman, H.; Uusitalo, J.; Sutinen, R.; Hänninen, P. Predicting forwarder rut formation on fine-grained mineral soils. Scand. J. For. Res. 2019, 34, 145–154. [Google Scholar] [CrossRef]
- Lacey, S.T.; Ryan, P.J. Cumulative management impacts on soil physical properties and early growth of Pinus radiata. For. Ecol. Manag. 2000, 138, 321–333. [Google Scholar] [CrossRef]
- Uusitalo, J.; Ala-Ilomäki, J.; Lindeman, H.; Toivio, J.; Siren, M. Modelling soil moisture—Soil strength relationship of fine-grained upland forest soils. Silva Fenn. 2019, 53, 10050. [Google Scholar] [CrossRef]
- Jones, M.-F.; Arp, P.A. Relating Cone Penetration and Rutting Resistance to Variations in Forest Soil Properties and Daily Moisture Fluctuations. Open J. Soil Sci. 2017, 7, 149–171. [Google Scholar] [CrossRef] [Green Version]
- Rönnqvist, M.; Flisberg, P.; Willén, E.; Frisk, M.; Friberg, G. Spatial optimization of ground based primary extraction routes using the BestWay decision support system. Can. J. For. Res. 2020. [Google Scholar] [CrossRef]
- Cambi, M.; Certini, G.; Neri, F.; Marchi, E. The impact of heavy traffic on forest soils: A review. For. Ecol. Manag. 2015, 338, 124–138. [Google Scholar] [CrossRef]
- Montgomery, D.R. Assessment of Soil Compaction Bulk Density Indices and Cone Index in Different Moistures and Depths for Application in Precise Tillage. World Appl. Sci. J. 1993, 29, 3925–3934. [Google Scholar]
- Schönauer, M.; Talbot, B.; Jaeger, D. TECH4EFFECT. Terrain Accessibility Maps for 4 Case Study Areas. 2019. Available online: http://www.tech4effect.eu/wp-content/uploads/2020/02/d41-terrain-accessability-maps-for-4-case-study-areas.pdf (accessed on 10 February 2020).
- Salmivaara, A.; Miettinen, M.; Finér, L.; Launiainen, S.; Korpunen, H.; Tuominen, S.; Heikkonen, J.; Nevalainen, P.; Sirén, M.; Ala-Ilomäki, J.; et al. Wheel rut measurements by forest machine-mounted LiDAR sensors—Accuracy and potential for operational applications? Int. J. For. Eng. 2018, 29, 41–52. [Google Scholar] [CrossRef] [Green Version]
- Ala-Ilomäki, J.; Salmivaara, A.; Launiainen, S.; Lindeman, H.; Kulju, S.; Finér, L.; Heikkonen, J.; Uusitalo, J. Assessing extraction trail trafficability using harvester CAN-bus data. Int. J. For. Eng. 2020, 31, 138–145. [Google Scholar] [CrossRef]
- Sirén, M.; Ala-Ilomäki, J.; Lindeman, H.; Uusitalo, J.; Kiilo, K.; Salmivaara, A.; Ryynänen, A. Soil disturbance by cut-to-length machinery on mid-grained soils. Silva Fenn. 2019, 53, 1013. [Google Scholar] [CrossRef]
- Jones, M.-F.; Arp, P. Soil Trafficability Forecasting. OJF 2019, 9, 296–322. [Google Scholar] [CrossRef] [Green Version]
- Heubaum, F. Bodenscherfestigkeit auf Rückegassen. Forst Tech. 2015, 8, 18–22. [Google Scholar]
- Siekmeier, J.A.; Young, D.; Beberg, D. Comparison of the dynamic cone penetrometer with other tests during subgrade and granular base characterization in Minnesota. In Nondestructive Testing of Pavements and Backcalculation of Moduli: Third Volume; ASTM International: Conshohocken, PA, USA, 2000. [Google Scholar]
- David Suits, L.; Sheahan, T.C.; Chen, D.-H.; Lin, D.-F.; Liau, P.-H.; Bilyeu, J. A Correlation between Dynamic Cone Penetrometer Values and Pavement Layer Moduli. Geotech. Test. J. 2005, 28, 42–49. [Google Scholar] [CrossRef]
- Poltorak, B.J.; Labelle, E.R.; Jaeger, D. Soil displacement during ground-based mechanized forest operations using mixed-wood brush mats. Soil Tillage Res. 2018, 179, 96–104. [Google Scholar] [CrossRef]
- Pei, T.; Qin, C.-Z.; Zhu, A.-X.; Yang, L.; Luo, M.; Li, B.; Zhou, C. Mapping soil organic matter using the topographic wetness index: A comparative study based on different flow-direction algorithms and kriging methods. Ecol. Indic. 2010, 10, 610–619. [Google Scholar] [CrossRef]
- Waga, K.; Malinen, J.; Tokola, T. A Topographic Wetness Index for Forest Road Quality Assessment: An Application in the Lakeland Region of Finland. Forests 2020, 11, 1165. [Google Scholar] [CrossRef]
- Murphy, P.N.C.; Ogilvie, J.; Arp, P. Topographic modelling of soil moisture conditions: A comparison and verification of two models. Eur. J. Soil Sci. 2009, 60, 94–109. [Google Scholar] [CrossRef]
- Murphy, P.N.C.; Ogilvie, J.; Meng, F.-R.; White, B.; Bhatti, J.S.; Arp, P.A. Modelling and mapping topographic variations in forest soils at high resolution: A case study. Ecol. Model. 2011, 222, 2314–2332. [Google Scholar] [CrossRef]
- Campbell, D.M.H.; White, B.; Arp, P.A. Modeling and mapping soil resistance to penetration and rutting using LiDAR-derived digital elevation data. J. Soil Water Conserv. 2013, 68, 460–473. [Google Scholar] [CrossRef] [Green Version]
- Tuomasjukka, D.; Herder, M.D.; Wallius, V.; Rois, M.; Kunttu, J.; Korhonen, M.; Prinz, R.; Routa, J.; Eberhard, B.R.; Pucher, C.; et al. TECH4EFFECT. Knowledge and Technologies for Our Forests of the Future. 2020. Available online: http://www.tech4effect.eu/wp-content/uploads/2020/09/policy-brief-web.pdf (accessed on 10 December 2020).
- IUSS Working Group WRB. World Reference Base for Soil Resources 2014, Update 2015: International Soil Classification System for Naming Soils and Creating Legends for Soil Maps; FAO: Rome, Italy, 2015. [Google Scholar]
- DWD. Niederschlag: Vieljährige Mittelwerte 1981–2010. Available online: https://www.dwd.de/DE/leistungen/klimadatendeutschland/mittelwerte/nieder_8110_fest_html.html?view=nasPublication&nn=16102 (accessed on 23 September 2020).
- WetterKontor. Rückblick für Uslar (N)—WetterKontor. Available online: https://www.wetterkontor.de/de/wetter/deutschland/rueckblick.asp?id=R666&datum0=01.07.2020&datum1=31.08.2020&jr=2020&mo=9&datum=22.09.2020&t=8&part=0 (accessed on 23 September 2020).
- Durner, W.; Iden, S.C.; von Unold, G. The integral suspension pressure method (ISP) for precise particle-size analysis by gravitational sedimentation. Water Resour. Res. 2017, 53, 33–48. [Google Scholar] [CrossRef]
- Eijkelkamp Agrisearch Equipment. User Manual for the Moisture Meter Type HH2. Available online: https://www.eijkelkamp.com/download.php?file=M1142602e_Soil_moisture_meter_f1ab.pdf (accessed on 7 August 2020).
- Schönauer, M.; Väätäinen, K.; Lindemann, H.; Prinz, R.; Pszenny, D.; Heppelmann, J.; Jansen, M.; Jaeger, D.; Talbot, B.; Astrup, R.; et al. Prediction of forest soil trafficability by depth-to-water-maps considering temporal variations of soil moisture and penetration resistance. TECH4EFFECT. manuscript in preparation.
- Eijkelkamp. Field Inspection Vane Tester. Available online: https://en.eijkelkamp.com/products/field-measurement-equipment/field-inspection-vane-tester.html (accessed on 29 September 2020).
- QGIS.org. QGIS Geographic Information System; Open Source Geospatial Foundation Project, 2020. [Google Scholar]
- LGLN. Landesamt für Geoinformation und Landesvermessung Niedersachsen. Available online: https://www.lgln.niedersachsen.de/startseite/ (accessed on 24 September 2020).
- Bartels, S.F.; Caners, R.T.; Ogilvie, J.; White, B.; Macdonald, S.E. Relating Bryophyte Assemblages to a Remotely Sensed Depth-to-Water Index in Boreal Forests. Front. Plant Sci. 2018, 9, 858. [Google Scholar] [CrossRef]
- Mohtashami, S.; Eliasson, L.; Jansson, G.; Sonesson, J. Influence of soil type, cartographic depth-to-water, road reinforcement and traffic intensity on rut formation in logging operations: A survey study in Sweden. Silva Fenn. 2017, 51, 2018. [Google Scholar] [CrossRef] [Green Version]
- White, B.; Ogilvie, J.; Campbell, D.M.H.; Hiltz, D.; Gauthier, B.; Chisholm, H.K.; Wen, H.K.; Murphy, P.N.C.; Arp, P.A. Using the Cartographic Depth-to-Water Index to Locate Small Streams and Associated Wet Areas across Landscapes. Can. Water Resour. J. 2012, 37, 333–347. [Google Scholar] [CrossRef]
- Jones, M.-F. Mapping Soil Trafficability by Way of Temporal Hydrology Modeling and Spatial Wet-Areas-Mapping. Ph.D. Dissertation, University of New Brunswick, Fredericton, NB, Canada, 2019. [Google Scholar]
- Ågren, A.; Lidberg, W.; Strömgren, M.; Ogilvie, J.; Arp, P.A. Evaluating digital terrain indices for soil wetness mapping—A Swedish case study. Hydrol. Earth Syst. Sci. 2014, 18, 3623–3634. [Google Scholar] [CrossRef] [Green Version]
- Sörensen, R.; Zinko, U.; Seibert, J. On the calculation of the topographic wetness index: Evaluation of different methods based on field observations. Hydrol. Earth Syst. Sci. 2006, 10, 101–112. [Google Scholar] [CrossRef] [Green Version]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2019; Available online: https://www.R-project.org (accessed on 21 June 2020).
- RStudio Team. RStudio: Integrated Development Environment for R; RStudio, PBC: Boston, MA, USA, 2016; Available online: http://www.rstudio.com (accessed on 21 June 2020).
- Peterson, B.G.; Carl, P. PerformanceAnalytics: Econometric Tools for Performance and Risk Analysis. 2020. Available online: https://CRAN.R-project.org/package=PerformanceAnalytics (accessed on 10 December 2020).
- Labelle, E.R.; Jaeger, D. Effects of steel flexible tracks on forwarder peak load distribution: Results from a prototype load test platform. Croat. J. For. Eng. 2019, 40, 1–23. [Google Scholar]
- Rab, M.A. Recovery of soil physical properties from compaction and soil profile disturbance caused by logging of native forest in Victorian Central Highlands, Australia. For. Ecol. Manag. 2004, 191, 329–340. [Google Scholar] [CrossRef]
- Vossbrink, J.; Horn, R. Modern forestry vehicles and their impact on soil physical properties. Eur. J. For. Res. 2004, 123, 259–267. [Google Scholar] [CrossRef]
- Daddow, R.L.; Warrington, G. Growth-Limiting Soil Bulk Densities as Influenced by Soil Texture; Watershed Systems Development Group, USDA Forest Service: Fort Collins, CO, USA, 1983. [Google Scholar]
- Han, H.-S.; Page-Dumroese, D.; Han, S.-K.; Tirocke, J. Effects of Slash, Machine Passes, and Soil Moisture on Penetration Resistance in a Cut-to-length Harvesting. Int. J. For. Eng. 2006, 17, 11–24. [Google Scholar] [CrossRef]
- Agherkakli, B.; Najafi, A.; Sadeghi, S.H. Ground based operation effects on soil disturbance by steel tracked skidder in a steep slope of forest. J. For. Sci. 2010, 56, 278–284. [Google Scholar] [CrossRef] [Green Version]
- McNabb, D.H.; Startsev, A.D.; Nguyen, H. Soil wetness and traffic level effects on bulk density and air-filled porosity of compacted boreal forest soils. Soil Sci. Soc. Am. J. 2001, 65, 1238–1247. [Google Scholar] [CrossRef]
- Jamshidi, R.; Jaeger, D.; Raafatnia, N.; Tabari, M. Influence of two ground-based skidding systems on soil compaction under different slope and gradient conditions. Int. J. For. Eng. 2008, 19, 9–16. [Google Scholar] [CrossRef]
- Arvidsson, J.; Sjöberg, E.; van den Akker, J.J.H. Subsoil compaction by heavy sugarbeet harvesters in southern Sweden. Soil Tillage Res. 2003, 73, 77–87. [Google Scholar] [CrossRef]
- Hillel, D. Environmental Soil Physics: Fundamentals, Applications, and Environmental Considerations; Elsevier: San Diego, CA, USA, 1998. [Google Scholar]
- Froehlich, H.A.; Azevedo, J.; Cafferata, P.; Lysne, D. Predicting Soil Compaction on Forested Land: Final Project Report to U.S. Forest Service; U.S. Forest Service: Missoula, MT, USA, 1980. [Google Scholar]
- Schönauer, M.; Holzfeind, T.; Hoffmann, S.; Holzleitner, F.; Hinte, B.; Jaeger, D. Effect of a traction-assist winch on wheel slippage and machine induced soil disturbance in flat terrain. Int. J. For. Eng. 2020, 39. [Google Scholar] [CrossRef]
- Haas, J.; Hagge Ellhöft, K.; Schack-Kirchner, H.; Lang, F. Using photogrammetry to assess rutting caused by a forwarder—A comparison of different tires and bogie tracks. Soil Tillage Res. 2016, 163, 14–20. [Google Scholar] [CrossRef]
- Naghdi, R.; Bagheri, I.; Lotfalian, M.; Setodeh, B. Rutting and soil displacement caused by 450C Timber Jack wheeled skidder (Asalem forest northern Iran). J. For. Sci. 2009, 55, 177–183. [Google Scholar] [CrossRef] [Green Version]
- NLF. Bodenschutz bei der Holzernte in den Niedersächsischen Landesforsten. 2017. Available online: https://www.landesforsten.de/wp-content/uploads/2018/06/merkblatt_bodenschutz_apr_2017.pdf (accessed on 19 January 2021).
- Labelle, E.R.; Poltorak, B.J.; Jaeger, D. The role of brush mats in mitigating machine-induced soil disturbances: An assessment using absolute and relative soil bulk density and penetration resistance. Can. J. For. Res. 2019, 49, 164–178. [Google Scholar] [CrossRef]
- Uusitalo, J.; Ala-Ilomäki, J.; Lindeman, H.; Toivio, J.; Siren, M. Predicting rut depth induced by an 8-wheeled forwarder in fine-grained boreal forest soils. Ann. For. Sci. 2020, 77, 42. [Google Scholar] [CrossRef] [Green Version]
- Niemi, M.T.; Vastaranta, M.; Vauhkonen, J.; Melkas, T.; Holopainen, M. Airborne LiDAR-derived elevation data in terrain trafficability mapping. Scand. J. For. Res. 2017, 32, 762–773. [Google Scholar] [CrossRef]
- Webster, S.L.; Grau, R.H.; Williams, T.P. Description and Application of Dual Mass Dynamic Cone Penetrometer; Geotechnical Laboratory (US): Vicksburg, MS, USA, 1992. [Google Scholar]
- Jacke, H.; Hittenbeck, J.; Stiehm, C. Spuren im Wald: Zur Spurrillen-Diskussion um und auf Rückegassen; Bericht über die Ergebnisse einer Kurzstudie (zu Teilen gefördert durch Forschungsmittel des Landes Rheinland-Pfalz): Goettingen, Germany, 2011. [Google Scholar]
- Salmivaara, A.; Launiainen, S.; Perttunen, J.; Nevalainen, P.; Pohjankukka, J.; Ala-Ilomäki, J.; Sirén, M.; Laurén, A.; Tuominen, S.; Uusitalo, J.; et al. Towards dynamic forest trafficability prediction using open spatial data, hydrological modelling and sensor technology. Forestry 2020, 93, 662–674. [Google Scholar] [CrossRef]
- Schönauer, M. Supplementary Data for: Comparison of Selected Terramechanical Test Procedures and Cartographic Indices to Predict Rutting Caused by Machine Traffic during a Cut-to-Length Thinning-Operation. 2020. Available online: https://doi.org/10.25625/LQJBML (accessed on 19 January 2021).
- Wickham, H.; François, R.; Henry, L.; Müller, K. dplyr: A Grammar of Data Manipulation. 2020. Available online: https://CRAN.R-project.org/package=dplyr (accessed on 21 June 2020).










| Character | Unit | Ponsse Bear | Ponsse Buffalo |
|---|---|---|---|
| power | kW | 260 | 210 |
| typical mass | Mg | 24.5 | 19.8 |
| loading capacity | Mg | - | 15.0 |
| tire type | Nokian Forest King TRS 2 | Alliance Forestar 344, 20 PR | |
| tire size (width, diameter) | mm | 750, 1485 | 710, 1340 |
| inflation pressure | kPa | 600 | 500 |
| Date (2020) | Objective | Measurement | |
|---|---|---|---|
| 15 July | initial measurements of 90 transects | reference profile to estimate rut depth increment and | Dzinit |
| terramechanical parameters | SMCVOL, CI, CIMOD, PD, DCP, τ, SBDINIT, SMCGRAV | ||
| 4 August | harvester performed the felling and processing | ||
| 10 August | measurement of profiles | rut depth after harvester | DzH |
| 17–21 August | forwarder excavated timber | ||
| 1 September | post-operational measurements | rut depth after forwarder, total rut depth and | DzF |
| on the remaining 47 transects | post-operational soil bulk density and moisture content | SBDPOST, SMCGRAV | |
| Parameter | n | Mean | SD | Min. | 0.25 | 0.75 | Max. |
|---|---|---|---|---|---|---|---|
| CI (MPa) | 47 | 1.52 | 0.31 | 1.01 | 1.29 | 1.70 | 2.53 |
| CIMOD (MPa) | 47 | 2.24 | 0.61 | 1.25 | 1.78 | 2.51 | 3.61 |
| PD (cm) | 47 | 30.86 | 14.78 | 10.29 | 18.00 | 41.00 | 62.86 |
| DCP (cm blow−1) | 47 | 4.18 | 4.22 | 0.00 | 1.77 | 4.94 | 21.60 |
| τ (kPa) | 47 | 214.02 | 69.63 | 127.43 | 150.14 | 265.57 | 365.14 |
| rutH (cm) | rutT (cm) | Test Statistics for rutH | |||||
|---|---|---|---|---|---|---|---|
| DTW | n | Mean | SD | Mean | SD | t-Value | p-Value |
| <1 m | 4 | 2.65 | 2.50 | 5.17 | 1.54 | ||
| >1 m | 43 | 3.71 | 1.56 | 6.43 | 2.14 | 1.35 | 0.18 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schönauer, M.; Hoffmann, S.; Maack, J.; Jansen, M.; Jaeger, D. Comparison of Selected Terramechanical Test Procedures and Cartographic Indices to Predict Rutting Caused by Machine Traffic during a Cut-to-Length Thinning Operation. Forests 2021, 12, 113. https://doi.org/10.3390/f12020113
Schönauer M, Hoffmann S, Maack J, Jansen M, Jaeger D. Comparison of Selected Terramechanical Test Procedures and Cartographic Indices to Predict Rutting Caused by Machine Traffic during a Cut-to-Length Thinning Operation. Forests. 2021; 12(2):113. https://doi.org/10.3390/f12020113
Chicago/Turabian StyleSchönauer, Marian, Stephan Hoffmann, Joachim Maack, Martin Jansen, and Dirk Jaeger. 2021. "Comparison of Selected Terramechanical Test Procedures and Cartographic Indices to Predict Rutting Caused by Machine Traffic during a Cut-to-Length Thinning Operation" Forests 12, no. 2: 113. https://doi.org/10.3390/f12020113
APA StyleSchönauer, M., Hoffmann, S., Maack, J., Jansen, M., & Jaeger, D. (2021). Comparison of Selected Terramechanical Test Procedures and Cartographic Indices to Predict Rutting Caused by Machine Traffic during a Cut-to-Length Thinning Operation. Forests, 12(2), 113. https://doi.org/10.3390/f12020113